WO2020026509A1 - 電池状態推定装置、電池制御装置 - Google Patents
電池状態推定装置、電池制御装置 Download PDFInfo
- Publication number
- WO2020026509A1 WO2020026509A1 PCT/JP2019/011056 JP2019011056W WO2020026509A1 WO 2020026509 A1 WO2020026509 A1 WO 2020026509A1 JP 2019011056 W JP2019011056 W JP 2019011056W WO 2020026509 A1 WO2020026509 A1 WO 2020026509A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- cell
- battery
- soc
- value
- battery state
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images











Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R31/00—Arrangements for testing electric properties; Arrangements for locating electric faults; Arrangements for electrical testing characterised by what is being tested not provided for elsewhere
- G01R31/36—Arrangements for testing, measuring or monitoring the electrical condition of accumulators or electric batteries, e.g. capacity or state of charge [SoC]
- G01R31/382—Arrangements for monitoring battery or accumulator variables, e.g. SoC
- G01R31/3842—Arrangements for monitoring battery or accumulator variables, e.g. SoC combining voltage and current measurements
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R31/00—Arrangements for testing electric properties; Arrangements for locating electric faults; Arrangements for electrical testing characterised by what is being tested not provided for elsewhere
- G01R31/36—Arrangements for testing, measuring or monitoring the electrical condition of accumulators or electric batteries, e.g. capacity or state of charge [SoC]
- G01R31/367—Software therefor, e.g. for battery testing using modelling or look-up tables
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R31/00—Arrangements for testing electric properties; Arrangements for locating electric faults; Arrangements for electrical testing characterised by what is being tested not provided for elsewhere
- G01R31/36—Arrangements for testing, measuring or monitoring the electrical condition of accumulators or electric batteries, e.g. capacity or state of charge [SoC]
- G01R31/385—Arrangements for measuring battery or accumulator variables
- G01R31/387—Determining ampere-hour charge capacity or SoC
- G01R31/388—Determining ampere-hour charge capacity or SoC involving voltage measurements
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R31/00—Arrangements for testing electric properties; Arrangements for locating electric faults; Arrangements for electrical testing characterised by what is being tested not provided for elsewhere
- G01R31/36—Arrangements for testing, measuring or monitoring the electrical condition of accumulators or electric batteries, e.g. capacity or state of charge [SoC]
- G01R31/396—Acquisition or processing of data for testing or for monitoring individual cells or groups of cells within a battery
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01M—PROCESSES OR MEANS, e.g. BATTERIES, FOR THE DIRECT CONVERSION OF CHEMICAL ENERGY INTO ELECTRICAL ENERGY
- H01M10/00—Secondary cells; Manufacture thereof
- H01M10/42—Methods or arrangements for servicing or maintenance of secondary cells or secondary half-cells
- H01M10/425—Structural combination with electronic components, e.g. electronic circuits integrated to the outside of the casing
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01M—PROCESSES OR MEANS, e.g. BATTERIES, FOR THE DIRECT CONVERSION OF CHEMICAL ENERGY INTO ELECTRICAL ENERGY
- H01M10/00—Secondary cells; Manufacture thereof
- H01M10/42—Methods or arrangements for servicing or maintenance of secondary cells or secondary half-cells
- H01M10/44—Methods for charging or discharging
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01M—PROCESSES OR MEANS, e.g. BATTERIES, FOR THE DIRECT CONVERSION OF CHEMICAL ENERGY INTO ELECTRICAL ENERGY
- H01M10/00—Secondary cells; Manufacture thereof
- H01M10/42—Methods or arrangements for servicing or maintenance of secondary cells or secondary half-cells
- H01M10/48—Accumulators combined with arrangements for measuring, testing or indicating the condition of cells, e.g. the level or density of the electrolyte
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—ELECTRIC POWER NETWORKS; CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J7/00—Circuit arrangements for charging or discharging batteries or for supplying loads from batteries
- H02J7/80—Circuit arrangements for charging or discharging batteries or for supplying loads from batteries including monitoring or indicating arrangements
- H02J7/82—Control of state of charge [SOC]
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—ELECTRIC POWER NETWORKS; CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J7/00—Circuit arrangements for charging or discharging batteries or for supplying loads from batteries
- H02J7/80—Circuit arrangements for charging or discharging batteries or for supplying loads from batteries including monitoring or indicating arrangements
- H02J7/82—Control of state of charge [SOC]
- H02J7/825—Detection of fully charged condition
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01M—PROCESSES OR MEANS, e.g. BATTERIES, FOR THE DIRECT CONVERSION OF CHEMICAL ENERGY INTO ELECTRICAL ENERGY
- H01M10/00—Secondary cells; Manufacture thereof
- H01M10/42—Methods or arrangements for servicing or maintenance of secondary cells or secondary half-cells
- H01M10/425—Structural combination with electronic components, e.g. electronic circuits integrated to the outside of the casing
- H01M2010/4271—Battery management systems including electronic circuits, e.g. control of current or voltage to keep battery in healthy state, cell balancing
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01M—PROCESSES OR MEANS, e.g. BATTERIES, FOR THE DIRECT CONVERSION OF CHEMICAL ENERGY INTO ELECTRICAL ENERGY
- H01M10/00—Secondary cells; Manufacture thereof
- H01M10/42—Methods or arrangements for servicing or maintenance of secondary cells or secondary half-cells
- H01M10/425—Structural combination with electronic components, e.g. electronic circuits integrated to the outside of the casing
- H01M2010/4278—Systems for data transfer from batteries, e.g. transfer of battery parameters to a controller, data transferred between battery controller and main controller
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—ELECTRIC POWER NETWORKS; CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J2105/00—Networks for supplying or distributing electric power characterised by their spatial reach or by the load
- H02J2105/30—Networks for supplying or distributing electric power characterised by their spatial reach or by the load the load networks being external to vehicles, i.e. exchanging power with vehicles
- H02J2105/33—Networks for supplying or distributing electric power characterised by their spatial reach or by the load the load networks being external to vehicles, i.e. exchanging power with vehicles exchanging power with road vehicles
- H02J2105/37—Networks for supplying or distributing electric power characterised by their spatial reach or by the load the load networks being external to vehicles, i.e. exchanging power with vehicles exchanging power with road vehicles exchanging power with electric vehicles [EV] or with hybrid electric vehicles [HEV]
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—ELECTRIC POWER NETWORKS; CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J7/00—Circuit arrangements for charging or discharging batteries or for supplying loads from batteries
- H02J7/50—Circuit arrangements for charging or discharging batteries or for supplying loads from batteries acting upon multiple batteries simultaneously or sequentially
- H02J7/52—Circuit arrangements for charging or discharging batteries or for supplying loads from batteries acting upon multiple batteries simultaneously or sequentially for charge balancing, e.g. equalisation of charge between batteries
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02E—REDUCTION OF GREENHOUSE GAS [GHG] EMISSIONS, RELATED TO ENERGY GENERATION, TRANSMISSION OR DISTRIBUTION
- Y02E60/00—Enabling technologies; Technologies with a potential or indirect contribution to GHG emissions mitigation
- Y02E60/10—Energy storage using batteries
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/70—Energy storage systems for electromobility, e.g. batteries
Definitions
- the present invention relates to a battery state estimation device and a battery control device.
- a state detection device that detects the state of the power storage unit is used.
- the state of the power storage means indicates a state of charge (SOC: State $ of Charge) indicating how much charge has been made or how much charge that can be discharged remains, and a degree of deterioration.
- SOH State of Health
- the SOC of a battery system for a portable device, an electric vehicle, or the like is obtained by integrating a discharge current from a full charge, and a charge amount (remaining capacity) remaining in the power storage means with respect to a maximum chargeable charge amount (full capacity). Can be detected by calculating the ratio of In addition, the relationship between the voltage across the battery (open circuit voltage) and the remaining capacity of the battery is defined in advance in a data table or the like, and the SOC can be detected by calculating the current remaining capacity with reference to this. it can. Furthermore, SOC can be obtained by combining these methods.
- Patent Literature 1 discloses an apparatus for balancing a plurality of cells included in a battery pack.
- the apparatus measures the voltage of each cell, and respectively measures the voltage change behavior including the current cell voltage and the past cell voltage.
- Open-circuit voltage estimating means for estimating the open-circuit voltage of the cell
- SOC estimating means for estimating the SOC of each cell from the open-circuit voltage, and selecting a cell requiring balancing by comparing the estimated SOC of each cell
- a cell balancing device using a voltage change behavior of a battery cell comprising: cell balancing means for controlling a balancing circuit corresponding to a selected cell to balance the SOC of the cell.
- An object of the present invention is to provide a battery state estimating device capable of estimating the state of charge of a battery at low cost and with high accuracy in order to solve the above-mentioned problems in the prior art.
- the battery state estimating device is a device that is connected to an assembled battery in which a plurality of cells are connected in series, and estimates a state of charge of the target cell using any one of the plurality of cells as a target cell.
- a cell voltage acquisition unit that acquires a measurement result of a closed circuit voltage of a cell, a reference cell is set for the plurality of cells, a closed circuit voltage and an open circuit voltage of the reference cell, and a state of charge of the reference cell.
- a reference cell information acquisition unit for acquiring a reference SOC value to be represented, a closed circuit voltage of the target cell, and a provisional charge state of the target cell based on the closed circuit voltage and the open circuit voltage of the reference cell.
- a tentative SOC calculation unit for obtaining a tentative SOC value and an SOC calculation unit for obtaining an SOC value representing a state of charge of the target cell using a result obtained by smoothing a difference between the tentative SOC value and the reference SOC value.
- a battery control device includes a battery state estimation device, and a balancing control device that controls balancing of the battery pack based on the SOC value of each cell obtained by the battery state estimation device.
- the present invention it is possible to provide a battery state estimating device capable of estimating the state of charge of a battery at low cost and with high accuracy.
- FIG. 1 is a block diagram illustrating a configuration of a battery system according to an embodiment of the present invention. It is a block diagram which shows the detail of a measurement part and an assembled battery.
- FIG. 2 is a functional block diagram illustrating details of a battery state estimation device according to the first embodiment of the present invention. It is a figure showing the processing flow of the battery state estimation device concerning a 1st embodiment of the present invention.
- FIG. 4 is a diagram illustrating a relationship between OCV and SOC. It is a functional block diagram showing details of a battery state estimating device concerning a 2nd embodiment of the present invention. It is a figure showing the processing flow of the battery state estimation device concerning a 2nd embodiment of the present invention.
- FIG. 14 is a functional block diagram illustrating details of a battery state estimation device according to a fifth embodiment of the present invention. It is a figure showing the processing flow of the battery state estimation device concerning a 5th embodiment of the present invention. It is a block diagram showing the composition of the battery system concerning a 6th embodiment of the present invention.
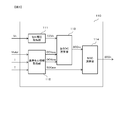
- FIG. 1 is a block diagram showing a configuration of a battery system 1000 according to one embodiment of the present invention.
- the battery system 1000 is a system that supplies the electric charge stored in the battery pack 400 to an external device as electric power, and includes a battery control device 100, a measuring unit 200, and an output unit 300.
- the target to which the battery system 1000 supplies power is, for example, an electric vehicle, a hybrid vehicle, a train, and the like.
- the battery pack 400 is a chargeable / dischargeable battery such as a lithium ion secondary battery.
- the present invention can be applied to devices having a power storage function, such as nickel hydride batteries, lead batteries, and electric double layer capacitors.
- the battery pack 400 is configured by connecting a plurality of unit cells (hereinafter simply referred to as “cells”) in series.
- the battery state estimation requires the internal resistance R of the battery pack 400 as described later, in the present embodiment, the battery state estimation device 110 calculates using the other measurement parameters.
- the output unit 300 is a functional unit that outputs the output of the battery control device 100 to an external device (for example, a higher-level device such as a vehicle control device included in an electric vehicle).
- an external device for example, a higher-level device such as a vehicle control device included in an electric vehicle.
- the battery control device 100 is a device that controls the operation of the battery pack 400, and includes a battery state estimation device 110 and a storage unit 120.
- the battery state estimating device 110 is based on the cell voltage Vn, the total voltage Vtotal, the battery current I, the battery temperature T measured by the measuring unit 200, and the characteristic information of the battery pack 400 stored in the storage unit 120.
- the SOC of each cell of the battery pack 400 is calculated. The details of the SOC calculation method will be described later.
- the storage unit 120 stores characteristic information that can be known in advance, such as the internal resistance R, polarization voltage Vp, charging efficiency, allowable current, and total capacity of each cell of the battery pack 400.
- characteristic information such as the internal resistance R, polarization voltage Vp, charging efficiency, allowable current, and total capacity of each cell of the battery pack 400.
- a value may be stored individually for each charging / discharging operation, or a value may be stored separately for each state of each cell, such as a state of charge or temperature.
- One value common to all states of the cell may be stored.
- the battery control device 100 and the battery state estimation device 110 can be configured using hardware such as a circuit device that realizes the functions. Further, it is also possible to configure the software by implementing the function by executing an arithmetic unit such as a CPU (Central Processing Unit). In the latter case, the software is stored in the storage unit 120, for example.
- arithmetic unit such as a CPU (Central Processing Unit).
- the software is stored in the storage unit 120, for example.
- the storage unit 120 is configured using a storage device such as a flash memory, an electrically erasable programmable read-only memory (EEPROM), or a magnetic disk.
- the storage unit 120 may be provided outside the battery state estimation device 110, or may be realized as a memory device provided inside the battery state estimation device 110.
- the storage unit 120 may be removable. When it is made detachable, the characteristic information and the software can be easily changed by replacing the storage unit 120. In addition, by having a plurality of storage units 120 and storing the characteristic information and the software separately in the replaceable storage unit 120, the characteristic information and the software can be updated in small units.
- FIG. 2 is a block diagram showing details of the measuring unit 200 and the assembled battery 400.
- the measuring unit 200 includes a cell voltage measuring unit 210, a total voltage measuring unit 211, a current measuring unit 212, and a temperature measuring unit 213.
- a plurality of cells 401 are connected in series.
- the cell voltage measurement unit 210 is connected to the positive electrode and the negative electrode of each cell 401, measures the cell voltage Vn of each cell 401, and outputs it to the battery state estimation device 110.
- the cell voltage measurement unit 210 may be configured by one piece of hardware capable of measuring the cell voltages of all the cells 401.
- the cell voltage measuring unit 210 may be configured by dividing the cells 401 into groups of a predetermined number and combining a plurality of hardware corresponding to each group.
- the total voltage measurement unit 211 includes a positive electrode of the cell 401 connected to the highest (highest potential) side in the battery pack 400 and a negative electrode of the cell 401 connected to the lowest (lowest potential) side in the battery pack 400. , And measures the total voltage Vtotal of the assembled battery 400 and outputs it to the battery state estimation device 110.
- the current measuring unit 212 measures the current flowing through the battery pack 400 and outputs the measured current to the battery state estimation device 110 as the battery current I. That is, since all the cells 401 in the assembled battery 400 are connected in series, the current measuring unit 212 measures the current flowing through the assembled battery 400 to measure the battery current I flowing commonly through each cell 401. Can be.
- the temperature measurement unit 213 includes a temperature sensor provided in the battery pack 400, measures the battery temperature T, and outputs it to the battery state estimation device 110.
- the temperature sensor is installed at a position corresponding to any one of the cells 401 constituting the battery pack 400.
- a temperature sensor may be directly attached to the cell 401, or a temperature sensor may be installed near the cell 401. Further, one temperature sensor may be used, or a plurality of temperature sensors attached to different cells 401 may be used in combination.
- FIG. 3 is a functional block diagram showing details of the battery state estimation device 110 according to the first embodiment of the present invention.
- the battery state estimating device 110 according to the present embodiment has functional blocks of a cell voltage acquiring unit 111, a reference cell information acquiring unit 112, a temporary SOC computing unit 113, and an SOC computing unit 114.
- Each of these functional blocks is realized as, for example, hardware configuring the battery state estimation device 110 or software executed by the CPU.
- CCV closed circuit voltage
- the reference cell information acquisition unit 112 sets a reference cell for a plurality of cells 401 included in the battery pack 400, and closes the open circuit voltage (CCV) and the open circuit voltage (OCV) of the reference cell, and charges the reference cell.
- a reference SOC value indicating a state is obtained.
- the reference cell information obtaining unit 112 determines the total battery voltage Vtotal, the battery current I, and the battery temperature T measured by the measuring unit 200 when the battery pack 400 is in the energized state.
- the average value of CCV, OCV, and SOC of each cell 401 is obtained as the CCV, OCV, and reference SOC value of the reference cell.
- these acquired values are output as CCVave, OCVave, and SOCave, respectively.
- the method of calculating CCVave, OCVave, and SOCave by the reference cell information acquisition unit 112 will be described later.
- SOC calculation unit 114 obtains an SOC value indicating the state of charge of each cell 401 based on SOCnx input from temporary SOC calculation unit 113 and SOCave input from reference cell information acquisition unit 112. Then, based on the SOC value obtained for each cell 401, a cell charge state SOCn is output. The method of calculating SOCn by SOC calculating section 114 will be described later.
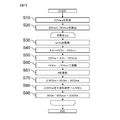
- FIG. 4 is a diagram showing a processing flow of the battery state estimation device 110 according to the first embodiment of the present invention.
- the battery state estimation device 110 of the present embodiment estimates the state of charge of each cell 401 by executing the processing flow shown in FIG. 4 at predetermined processing cycles when the battery pack 400 is in the energized state.
- the reference cell information acquisition unit 112 calculates an average cell voltage CCVave per cell of the battery pack 400.
- the reference cell information obtaining unit 112 calculates CCVave by obtaining the total voltage Vtotal from the measuring unit 200 and dividing the total voltage Vtotal by the number of cells of the assembled battery 400. Then, the calculated value of CCVave is output to provisional SOC calculating section 113.
- the reference cell information acquisition unit 112 calculates the average cell state of charge SOCave of the battery pack 400 and the average cell voltage OCVave per cell when the battery pack 400 is not energized.
- the reference cell information acquisition unit 112 for example, based on the known SOC value of the entire assembled battery 400 at a certain point in the past and the integration result of the battery current I acquired from the measuring unit 200, Is obtained, and this is defined as SOCave.
- the OCV value of the assembled battery 400 corresponding to the calculated SOCave is obtained using the relationship between the OCV and the SOC of the entire assembled battery 400 included in the characteristic information stored in the storage unit 120, and the OCV value is calculated. Is divided by the number of cells of the assembled battery 400 to calculate the OCVave.
- the calculated OCVave and SOCave values are output to provisional SOC calculating section 113 and SOC calculating section 114, respectively.
- the reference cell information acquisition unit 112 estimates the resistance value of the entire assembled battery 400 based on the battery temperature T acquired from the measurement unit 200, and calculates OCVave based on this and the CCVave obtained in step S10. It may be calculated.
- the SOCave can be calculated from the OCVave calculation result using the relationship between the OCV and the SOC of the entire battery pack 400 included in the characteristic information stored in the storage unit 120.
- the reference cell information acquisition unit 112 can calculate the SOCave and the OCVave by using an arbitrary method.
- the battery state estimating apparatus 110 sequentially executes the processing of steps S30 to S90 for each cell 401 of the assembled battery 400.
- step S30 the cell voltage acquisition unit 111 acquires the cell voltage CCVn of the target cell from the measurement unit 200. Then, the calculated value of CCVn is output to provisional SOC calculating section 113.
- step S40 the temporary SOC calculation unit 113 calculates a cell voltage difference ⁇ Vn between the target cell and the reference cell.
- the temporary SOC calculation unit 113 subtracts the average cell voltage CCVave input from the reference cell information obtaining unit 112 in step S10 from the cell voltage CCVn of the target cell input from the cell voltage obtaining unit 111 in step S30.
- the cell voltage difference ⁇ Vn is obtained by the following equation (1).
- ⁇ Vn CCVn-CCVave (1)
- step S50 the temporary SOC calculation unit 113 calculates the value of the temporary OCV of the target cell, that is, OCVnx.
- provisional SOC calculating section 113 calculates OCVnx by adding OCVave calculated in step S20 to cell voltage difference ⁇ Vn calculated in step S40. That is, in step S50, OCVnx is obtained by the following equation (2).
- OCVnx ⁇ Vn + OCVave (2)
- step S60 the temporary SOC calculation unit 113 converts the OCVnx calculated in step S50 into an SOC value, thereby calculating the SOCnx which is the temporary SOC value of the target cell.
- provisional SOC calculating section 113 converts OCVnx to SOCnx using the relationship between OCV and SOC of each cell included in the characteristic information stored in storage section 120. Then, the calculated SOCnx value is output to SOC calculating section 114.
- FIG. 5 is a diagram showing the relationship between the open circuit voltage OCV and SOC of each cell. This correspondence is determined by the characteristics of each cell 401 in the battery pack 400, and data defining the correspondence is stored in the storage unit 120 in advance as an SOC table.
- the temporary SOC calculation unit 113 can calculate the SOCnx, which is the temporary SOC of the target cell, by referring to the SOC table using the OCVnx calculated in step S50 as a key.
- the OCVnx calculated in step S50 is calculated using the cell voltage difference ⁇ Vn obtained from the cell voltage CCVn of the target cell during energization.
- the SOCnx calculated as the temporary SOC of the target cell in step S60 is obtained from the OCVnx. Therefore, the SOCnx is a measurement error of the cell voltage measurement unit 210, a difference in measurement timing between the CCVn of the target cell and the battery current I, and a difference in internal resistance of each cell (individual difference, temperature difference, deterioration state difference, etc.). And is not accurate. Therefore, in the present embodiment, the accurate SOC of the target cell is obtained from SOCnx by performing the calculation described below in the SOC calculation unit 114.
- step S70 the SOC calculator 114 calculates a temporary difference value ⁇ SOCnx of the SOC of the target cell with respect to the reference cell.
- SOC calculating section 114 calculates ⁇ SOCnx by subtracting the SOCave value input from reference cell information obtaining section 112 in step S20 from the SOCnx value input from temporary SOC calculating section 113 in step S60. I do. That is, in step S70, ⁇ SOCnx is obtained by the following equation (3).
- ⁇ SOCnx SOCnx ⁇ SOCave (3)
- step S80 the actual difference value ⁇ SOCn of the SOC of the target cell with respect to the reference cell is calculated by smoothing the provisional difference value ⁇ SOCnx calculated in step S70 by the SOC calculation unit 114.
- the smoothing process performed in step S80 is to smooth and smooth variations of the temporary difference value ⁇ SOCnx in each processing cycle, thereby reducing errors and noises included in the temporary difference value ⁇ SOCnx and real difference values. This is a process for calculating ⁇ SOCn.
- the smoothing process in step S80 is realized by, for example, a moving average process or a filter process using a predetermined digital filter such as a low-pass filter or a Kalman filter.
- the smoothing process may be performed by a weighted moving average in which a newer value is weighted more heavily.
- the weighting of each value can be determined according to an arbitrary processing method such as a linear weighted moving average, an exponential moving average, a modified moving average, and a triangular moving average.
- step S90 the SOC operation unit 114 calculates the SOC value of the target cell using the result of the smoothing process in step S80.
- SOC calculating section 114 adds the actual difference value ⁇ SOCn after the smoothing process obtained in step S80 to the value of SOCave input from reference cell information obtaining section 112 in step S20, thereby obtaining the value of the target cell.
- An SOC value SOCn is calculated. That is, in step S90, SOCn is obtained by the following equation (5).
- SOCn SOCave + ⁇ SOCn (5)
- step S90 After calculating the SOCn for the target cell in step S90, the process returns to step S30, and the processes of S30 to S90 are repeated.
- the processes of S30 to S90 can be performed on all the cells 401 as the target cells, the battery state estimation device 110 ends the processing flow of FIG.
- the actual difference value ⁇ SOCn is obtained by performing a smoothing process on the temporary difference value ⁇ SOCnx obtained by the above-described equation (3), and the actual difference value ⁇ SOCn is obtained. Is used to calculate the SOC value of the target cell by the above equation (5). Therefore, the SOC value of the target cell can be accurately obtained by simple processing without requiring complicated arithmetic processing and a complicated hardware configuration.
- the battery state estimation device 110 is a device that is connected to a battery pack 400 in which a plurality of cells 401 are connected in series, and estimates the charge state of a target cell using any one of the plurality of cells 401 as a target cell.
- the battery state estimation device 110 includes a cell voltage acquisition unit 111, a reference cell information acquisition unit 112, a temporary SOC calculation unit 113, and an SOC calculation unit 114.
- the cell voltage acquisition unit 111 acquires the measurement result of the closed circuit voltage CCVn of the target cell (Step S30).
- the reference cell information acquisition unit 112 sets a reference cell for the plurality of cells 401, and determines a closed circuit voltage CCVave and an open circuit voltage OCVave of the reference cell and an SOCave that is a reference SOC value indicating the state of charge of the reference cell.
- Acquire (Steps S10 and S20).
- the provisional SOC calculation unit 113 calculates SOCnx which is a provisional SOC value indicating a provisional state of charge of the target cell, based on the closed circuit voltage CCVn of the target cell and the closed circuit voltage CCVave and the open circuit voltage OCVave of the reference cell. (Steps S40 to S60).
- the SOC calculation unit 114 obtains SOCn, which is the SOC value indicating the state of charge of the target cell, using the result of smoothing the difference ⁇ SOCnx between SOCnx and SOCave (steps S70 to S90). With this configuration, it is possible to provide the battery state estimating device 110 capable of estimating the state of charge of each cell 401 of the battery pack 400 with low cost and high accuracy.
- the smoothing process performed in step S80 can include at least one of a moving average process and a filter process using a predetermined digital filter. In this way, it is possible to surely reduce the time variation in the difference ⁇ SOCnx between SOCnx and SOCave, and to appropriately and easily calculate the actual difference value ⁇ SOCn after the smoothing process required for obtaining SOCn. .
- the reference cell information acquisition unit 112 sets CCVave and SOCave, which are the average values of the closed circuit voltage and the state of charge of the plurality of cells 401, as the closed circuit voltage and the reference SOC value of the reference cell, respectively.
- CCVave and SOCave are the average values of the closed circuit voltage and the state of charge of the plurality of cells 401, as the closed circuit voltage and the reference SOC value of the reference cell, respectively.
- OCVave as an open circuit voltage of the reference cell is obtained based on the obtained SOCave.
- FIG. 6 is a functional block diagram showing details of the battery state estimation device 110 according to the second embodiment of the present invention.
- the battery state estimating device 110 of the present embodiment includes, in addition to the functional blocks of the cell voltage obtaining unit 111, the reference cell information obtaining unit 112, the temporary SOC calculating unit 113, and the SOC calculating unit 114 described in the first embodiment, Further, a weight coefficient calculation unit 115 is provided.
- Weight coefficient calculating section 115 calculates weight coefficient W based on battery current I and battery temperature T measured by measuring section 200 when battery pack 400 is in the energized state.
- the weight coefficient W is output from the weight coefficient calculation unit 115 to the SOC calculation unit 114 and is used when the SOC calculation unit 114 performs a smoothing process. The method of calculating the weight coefficient W by the weight coefficient calculation unit 115 will be described later.
- FIG. 7 is a diagram showing a processing flow of the battery state estimation device 110 according to the second embodiment of the present invention.
- the battery state estimating device 110 of the present embodiment estimates the state of charge of each cell 401 by executing the processing flow shown in FIG. 7 at predetermined processing cycles when the battery pack 400 is in the energized state.
- steps S10 to S60 processes similar to those described in the first embodiment are respectively performed.
- the weight coefficient calculation unit 115 calculates a weight coefficient W.
- the weight coefficient calculating unit 115 calculates the weight coefficient W by, for example, the following equation (6) based on the absolute value of the battery current I representing the current flowing through the target cell and the internal resistance value of the target cell.
- R represents the internal resistance value of the target cell
- G1 and G2 represent behavior coefficients for characterizing the behavior of the smoothing process using the weight coefficient W. The relationship between the behavior coefficients G1 and G2 and the behavior of the smoothing process will be described later.
- W 1 / ⁇ (1+
- the internal resistance R of the target cell is stored in the storage unit 120 as characteristic information in advance. Since the internal resistance R varies depending on the state of charge of the target cell, the battery temperature T, and the like, an individual value is stored in the storage unit 120 for each of these combinations.
- characteristic information that defines the correspondence between the internal resistance R and the battery temperature T is stored as a resistance table.
- the weight coefficient calculation unit 115 acquires the internal resistance R from the resistance table based on the battery temperature T, and calculates the weight coefficient W using Expression (6).
- the SOC calculation unit 114 temporarily calculates the SOC of the target cell with respect to the reference cell in the same manner as described in the first embodiment. Is calculated.
- step S80 the actual difference value ⁇ SOCn of the SOC of the target cell with respect to the reference cell is calculated by smoothing the temporary difference value ⁇ SOCnx calculated in step S70 by the SOC calculation unit 114.
- the SOC calculation unit 114 in the present embodiment uses the weighting factor W calculated by the weighting factor calculation unit 115 in step S61 to calculate the temporary difference value ⁇ SOCnx before the smoothing process obtained in the current process.
- the smoothing process is performed by weighting and adding the actual difference value ⁇ SOCn after the smoothing process used in the calculation of the SOC value of the target cell obtained in the previous process.
- step S90 When the actual difference value ⁇ SOCn is calculated by performing a smoothing process using the weight coefficient W in step S80, in step S90, using the result, the SOCn, which is the SOC value of the target cell, is calculated by the above-described equation (5). calculate. After the SOCn for the target cell is calculated in step S90, the process returns to step S30 as in the first embodiment, and the processes in S30 to S90 are repeated. When the processes of S30 to S90 have been performed with all the cells 401 as the target cells, the battery state estimating apparatus 110 ends the processing flow of FIG.
- the behavior coefficient G1 is a coefficient relating to the entirety of the above-described equation (6), and is related to the stability of the smoothing process and the update frequency. Specifically, when the value of the behavior coefficient G1 is small, the stability of the actual difference value ⁇ SOCn (t) calculated by Expression (7) decreases, while the update frequency increases. As a result, instead of increasing the fluctuation range of the SOCn of the target cell calculated for each processing cycle, the followability to the actual SOC change is increased.
- the value of the behavior coefficient G1 is large, the stability of the actual difference value ⁇ SOCn calculated by Expression (7) is improved, while the update frequency is reduced. As a result, the fluctuation range of the SOCn of the target cell calculated for each processing cycle is reduced, but the followability to the actual SOC change is reduced.
- a value equal to or greater than 1 and equal to or less than a predetermined value such as 100 is set as the behavior coefficient G1.
- the behavior coefficient G2 is a coefficient relating to the absolute value of the battery current I in the above equation (6), and is related to the degree of influence of the battery current I on the smoothing process. Specifically, when the value of the behavior coefficient G2 is small, the degree of influence of the battery current I on the actual difference value ⁇ SOCn (t) calculated by the equation (7) decreases. As a result, the behavior of the SOCn of the target cell calculated for each processing cycle is less affected by the battery current I. Conversely, when the value of the behavior coefficient G2 is large, the degree of influence of the battery current I on the actual difference value ⁇ SOCn (t) calculated by the equation (7) increases.
- the SOCn of the target cell calculated for each processing cycle has higher stability if the absolute value of the battery current I is larger, and the update frequency increases if the absolute value of the battery current I is smaller.
- the period in which the absolute value of the battery current I is large does not normally continue over a long period of time, it is necessary to secure an appropriate update frequency for the SOCn of the target cell even if the value of the behavior coefficient G2 is increased to some extent.
- a value equal to or greater than 0 is set as the behavior coefficient G2.
- values according to the characteristics of each cell 401 of the assembled battery 400 are stored in the storage unit 120 in advance as the values of the behavior coefficients G1 and G2.
- the values of the behavior coefficients G1 and G2 that change according to the battery temperature T, the battery current I, the degree of deterioration of each cell 401, and the like are stored in the storage unit 120 as map information, and the behavior is referred to by referring to this map information.
- the values of the coefficients G1 and G2 may be determined.
- the battery state estimating device 110 includes a weight coefficient calculating unit 115 that calculates a weight coefficient W based on the absolute value of the battery current I flowing through the target cell and the internal resistance value R of the target cell.
- the moving average processing included in the smoothing processing performed in step S80 includes a temporary difference ⁇ SOCnx between the current SOCnx and SOCave and an actual difference ⁇ SOCn (after the smoothing processing used for calculating the previous SOC value of the target cell).
- t-1) is weighted and added using the weighting coefficient W according to equation (7). With this configuration, the accuracy of calculating the SOC value of the target cell can be improved.
- FIG. 8 is a functional block diagram showing details of the battery state estimation device 110 according to the third embodiment of the present invention.
- the battery state estimating device 110 of the present embodiment includes the functional blocks of the cell voltage obtaining unit 111, the reference cell information obtaining unit 112, the temporary SOC calculating unit 113, and the SOC calculating unit 114 described in the first embodiment.
- the battery current I is also input to the SOC calculation unit 114. Except for this point, it is the same as the functional block of FIG. 3 in the first embodiment.
- the SOC calculation unit 114 determines whether or not to perform the smoothing process based on the battery current I. When it is determined that the smoothing process is not to be performed, the SOC operation unit 114 holds the SOC value obtained in the previous process for each cell 401 as it is, and uses it as the current process result.
- FIG. 9 is a diagram showing a processing flow of the battery state estimating device 110 according to the third embodiment of the present invention.
- the battery state estimation device 110 of the present embodiment estimates the state of charge of each cell 401 by executing the processing flow shown in FIG. 9 at predetermined processing cycles when the battery pack 400 is in the energized state.
- steps S10 to S20 the same processing as that described in the first embodiment is performed.
- step S21 the SOC calculation unit 114 determines whether or not the absolute value of the battery current I is larger than a predetermined current threshold value Ith. If the absolute value of the battery current I exceeds the current threshold value Ith, the process proceeds to step S22; otherwise, the process proceeds to step S30.
- step S30 to S90 each of the cells 401 of the battery pack 400 is set as a target cell, and the same processing as that described in the first embodiment is performed.
- the battery state estimating device 110 ends the processing flow of FIG.
- step S22 the SOC operation unit 114 holds the value of the SOC of each cell obtained in the previous process. In this case, the SOC calculation unit 114 does not perform the smoothing process.
- the battery state estimating device 110 ends the processing flow in FIG.
- the SOC calculation unit 114 holds the previous SOC value without performing the smoothing process.
- the smoothing process is performed. By not performing this, it is possible to improve the calculation accuracy of the SOC value of the target cell.
- the previous SOC value when the absolute value of the battery current I flowing through the target cell exceeds a predetermined value, the previous SOC value is held without performing the smoothing process. It is also possible to determine the presence or absence of the smoothing process using conditions other than the above. For example, the amount of time change of the battery current I flowing through the target cell may be measured, and when the absolute value exceeds a predetermined value, the previous SOC value may be held without performing the smoothing process. Even in this case, the same operation and effect as the above (5) can be obtained. The presence or absence of the smoothing process may be determined using another condition.
- the battery state estimating device 110 determines whether or not the actual difference value ⁇ SOCn after the smoothing process obtained by the SOC calculation unit 114 has changed abruptly.
- An example in which a change amount restriction process for restricting is performed will be described.
- the configuration of the battery system 1000 according to the present embodiment, the configurations of the measuring unit 200 and the assembled battery 400, and the functional blocks of the battery state estimation device 110 are the same as those described with reference to FIGS. The description is omitted below.
- FIG. 10 is a diagram showing a processing flow of the battery state estimating device 110 according to the fourth embodiment of the present invention.
- the battery state estimating device 110 of the present embodiment estimates the state of charge of each cell 401 by executing the processing flow shown in FIG. 10 at predetermined processing cycles when the battery pack 400 is in the energized state.
- steps S10 to S80 processes similar to those described in the first embodiment are respectively performed.
- step S81 the SOC calculation unit 114 determines whether the actual difference value ⁇ SOCn after the smoothing process calculated in step S80 is larger than a predetermined difference threshold value Sth. If the actual difference value ⁇ SOCn exceeds the difference threshold value Sth, the process proceeds to step S82; otherwise, the process proceeds to step S90.
- step S82 the actual difference value ⁇ SOCn after the smoothing process calculated in step S80 is replaced with a difference threshold value Sth.
- the actual difference value ⁇ SOCn after the smoothing process is limited to be equal to or smaller than the difference threshold value Sth.
- the SOC calculation unit 114 performs the processing in step S90 using the restricted actual difference value ⁇ SOCn replaced with the difference threshold value Sth, thereby reducing the SOCn, which is the SOC value of the target cell. calculate.
- the battery state estimating apparatus 110 ends the processing flow of FIG.
- the SOC calculation unit 114 performs a variation limiting process of limiting the actual difference value ⁇ SOCn after the smoothing process to a predetermined value or less.
- FIG. 11 is a functional block diagram showing details of the battery state estimation device 110 according to the fifth embodiment of the present invention.
- the battery state estimating device 110 of the present embodiment includes the functional blocks of the cell voltage obtaining unit 111, the reference cell information obtaining unit 112, the temporary SOC calculating unit 113, and the SOC calculating unit 114 described in the first embodiment. I have.
- the reference cell information acquisition unit 112 sets a specific cell 401 among a plurality of cells 401 included in the battery pack 400 as a reference cell, and when the battery pack 400 is in an energized state, the measuring unit 200 The measured cell voltage Vref of the reference cell, the battery current I and the battery temperature T are acquired. Then, the obtained cell voltage Vref is output as the reference cell voltage CCVref representing the closed circuit voltage (CCV) of the reference cell. Further, based on the obtained cell voltage Vref, battery current I and battery temperature T, the open circuit voltage (OCV) and the SOC value of the cell reference cell are calculated, and these calculation results are used as the open circuit voltage OCVref of the reference cell. And a reference cell charge state SOCref.
- the cell 401 from which the values of OCV and SOC can be acquired as accurately as possible is used as the reference cell.
- the temperature of the cell 401 can be accurately measured, so that the OCV of the cell 401 can be calculated with high accuracy.
- the SOC can be calculated with high accuracy from the OCV.
- the cell 401 whose CCV is measured at the timing closest to the measurement timing of the battery current I is It may be a reference cell.
- the measurement timing of the battery current I and the measurement timing of the CCV of the cell 401 are substantially synchronized, and therefore, the OCV is increased from the CCV of the cell 401 using the following equivalent circuit equation (8). Accuracy can be calculated. Further, the SOC can be calculated with high accuracy from the OCV.
- CCV OCV ⁇ I ⁇ R (8)
- the reference cell information acquisition unit 112 can set an arbitrary cell 401 as a reference cell and acquire CCVref, OCVref, and SOCref for the reference cell.
- FIG. 12 is a diagram showing a processing flow of the battery state estimating device 110 according to the fifth embodiment of the present invention.
- the battery state estimation device 110 of the present embodiment estimates the state of charge of each cell 401 by executing the processing flow shown in FIG. 12 at predetermined processing cycles when the battery pack 400 is in the energized state.
- the reference cell information acquisition unit 112 acquires the reference cell voltage CCVref.
- the reference cell information acquisition unit 112 selects a preset reference cell from the plurality of cells 401 of the battery pack 400 based on the above-described viewpoint, and measures the measurement result of the cell voltage of the reference cell. Obtained from the unit 200. Then, it outputs the obtained cell voltage value to provisional SOC calculating section 113 as reference cell voltage CCVref.
- the reference cell information acquiring unit 112 calculates the reference cell charge state SOCref and the cell voltage OCVref when the reference cell is not energized.
- the reference cell information acquisition unit 112 estimates the resistance value R of the reference cell based on the battery temperature T acquired from the measurement unit 200, and acquires the resistance value R in step S10A using the above-described equivalent circuit equation (8).
- OCVref corresponding to the obtained CCVref is obtained.
- the SOCref can be calculated from the OCVref calculation result using the relationship between the OCV and the SOC of the reference cell included in the characteristic information stored in the storage unit 120. Note that SOCref and OCVref may be calculated by other methods.
- the reference cell information acquisition unit 112 outputs the calculated values of the OCVref and the SOCref to the provisional SOC calculation unit 113 and the SOC calculation unit 114, respectively.
- step S40A the temporary SOC calculator 113 calculates the cell voltage difference ⁇ Vn between the target cell and the reference cell.
- the temporary SOC calculation unit 113 subtracts the reference cell voltage CCVref input from the reference cell information acquisition unit 112 in step S10A from the cell voltage CCVn of the target cell input from the cell voltage acquisition unit 111 in step S30.
- the cell voltage difference ⁇ Vn is obtained by the following equation (1A).
- ⁇ Vn CCVn ⁇ CCVref (1A)
- step S50A the temporary SOC calculation unit 113 calculates OCVnx, which is the value of the temporary OCV of the target cell.
- temporary SOC calculating section 113 calculates OCVnx by adding OCVref calculated in step S20A to cell voltage difference ⁇ Vn calculated in step S40A. That is, in step S50A, OCVnx is obtained by the following equation (2A).
- OCVnx ⁇ Vn + OCVref (2A)
- step S70A the SOC calculating unit 114 calculates a temporary difference value ⁇ SOCnx of the SOC of the target cell with respect to the reference cell.
- step S90A the SOC calculation unit 114 calculates the SOC value of the target cell using the result of the smoothing processing in step S80. I do.
- SOC calculating section 114 adds the actual difference value ⁇ SOCn after the smoothing process obtained in step S80 to the value of SOCref input from reference cell information obtaining section 112 in step S20A, thereby obtaining the value of the target cell.
- An SOC value SOCn is calculated. That is, in step S90A, SOCn is obtained by the following equation (5A).
- SOCn SOCref + ⁇ SOCn (5A)
- step S90A After calculating the SOCn for the target cell in step S90A, the process returns to step S30 and repeats the processing of S30 to S90A.
- the battery state estimating device 110 ends the processing flow of FIG.
- a temperature sensor is provided at a position corresponding to at least one of the plurality of cells 401.
- the reference cell information acquisition unit 112 sets the cell 401 corresponding to the installation position of the temperature sensor as a reference cell.
- the cell voltage acquisition unit 111 acquires, as the closed circuit voltage CCVn of the target cell, the closed circuit voltage of each cell 401 of the battery pack 400 that is sequentially measured in each predetermined cycle.
- the reference cell information acquisition unit 112 sets the cell 401 whose closed circuit voltage is measured at the timing closest to the measurement timing of the battery current I among the plurality of cells 401 of the battery pack 400 as the reference cell. Because of this, the closed circuit voltage CCVref, the open circuit voltage OCVref, and the reference cell charge state SOCref of the reference cell can be accurately obtained.
- FIG. 13 is a block diagram showing a configuration of a battery system 1000A according to the sixth embodiment of the present invention.
- the battery system 1000A of the present embodiment includes a battery control device 100A, a measuring unit 200, an output unit 300, an assembled battery 400, and a balancing unit 500. Note that the measurement unit 200, the output unit 300, and the battery pack 400 are the same as those of the battery system 1000 described in the first embodiment, respectively, and thus description thereof will be omitted below.
- the battery control device 100A is a device that controls the operation of the battery pack 400, and includes a battery state estimation device 110, a storage unit 120, and a balancing control device 130.
- the battery state estimating device 110 is a device that calculates the SOC of each cell of the battery pack 400, and may be any of those described in the first to fifth embodiments.
- the storage unit 120 stores characteristic information that can be known in advance, such as the internal resistance R, the polarization voltage Vp, the charging efficiency, the allowable current, and the total capacity of each cell of the battery pack 400, as described in the first embodiment. I remember.
- the balancing control device 130 outputs a signal for controlling the discharge time of each cell to the balancing unit 500 based on the SOC value of each cell obtained by the battery state estimation device 110.
- the balancing unit 500 has a plurality of balancing switches (not shown) provided corresponding to each cell of the battery pack 400. The operation of each balancing switch is controlled according to an input signal from the balancing control device 130. As a result, the balancing control of the battery pack 400 is performed, and the variation in the SOC of each cell is suppressed.
- the battery control device 100A includes a battery state estimation device 110, and a balancing control device 130 that controls balancing of the battery pack 400 based on the SOC value of each cell obtained by the battery state estimation device 110.
Landscapes
- Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Physics & Mathematics (AREA)
- General Chemical & Material Sciences (AREA)
- Chemical Kinetics & Catalysis (AREA)
- Electrochemistry (AREA)
- Chemical & Material Sciences (AREA)
- Manufacturing & Machinery (AREA)
- Power Engineering (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Secondary Cells (AREA)
- Tests Of Electric Status Of Batteries (AREA)
- Charge And Discharge Circuits For Batteries Or The Like (AREA)
Abstract
複数のセルを直列に接続した組電池と接続され、前記複数のセルのいずれかを対象セルとして前記対象セルの充電状態を推定する電池状態推定装置は、前記対象セルの閉回路電圧の測定結果を取得するセル電圧取得部と、前記複数のセルに対して基準セルを設定し、前記基準セルの閉回路電圧および開回路電圧と、前記基準セルの充電状態を表す基準SOC値とを取得する基準セル情報取得部と、前記対象セルの閉回路電圧と、前記基準セルの閉回路電圧および開回路電圧とに基づいて、前記対象セルの仮の充電状態を表す仮SOC値を求める仮SOC演算部と、前記仮SOC値と前記基準SOC値の差分を平滑化処理した結果を用いて、前記対象セルの充電状態を表すSOC値を求めるSOC演算部と、を備える。
Description
本発明は、電池状態推定装置および電池制御装置に関する。
リチウムニ次電池、ニッケル水素電池、鉛電池、電気二重層キャパシタなどの蓄電手段を用いた装置、例えば電池システム、分散型電力貯蔵装置、電気自動車においては、蓄電手段を安全かつ有効に使用するため、蓄電手段の状態を検知する状態検知装置が用いられている。蓄電手段の状態としては、どの程度まで充電されているか、あるいはどの程度放電可能な電荷量が残っているのかを示す充電状態(SOC:State of Charge)、どの程度まで劣化しているのかを示す健康状態(SOH:State of Health)などがある。
携帯機器用や電気自動車等の電池システムにおけるSOCは、満充電からの放電電流を積算し、最大限充電可能な電荷量(全容量)に対し、蓄電手段に残っている電荷量(残存容量)の比を算出することにより検出することができる。その他、電池の両端電圧(開回路電圧)と電池の残存容量の関係をあらかじめデータテーブルなどに定義しておき、これを参照して現在の残存容量を算出することにより、SOCを検出することもできる。さらには、これら手法を組み合わせてSOCを求めることもできる。
下記の特許文献1には、バッテリーパックに含まれた複数のセルをバランシングする装置であって、それぞれのセルの電圧を測定して現在のセル電圧と過去のセル電圧を含む電圧変化挙動によってそれぞれのセルの開放電圧を推定する開放電圧推定手段と、前記開放電圧からそれぞれのセルのSOCを推定するSOC推定手段と、推定されたそれぞれのセルのSOCを比べてバランシングを要するセルを選択し、選択されたセルに対応するバランシング回路を制御してセルのSOCをバランシングするセルバランス手段と、を含むことを特徴とするバッテリーセルの電圧変化挙動を用いたセルバランス装置が記載されている。
上記特許文献1に記載されている技術では、各セルの開放電圧を推定するために、各セルの温度測定や、セル電圧に対する変化挙動と開放電圧変化量との間の相関関係を定義した数学的モデル、それぞれのセルの温度に対応する補正ファクターなどが必要となる。したがって、これらを実現するためのハードウェア構成が複雑となり、製造コストの増加につながる。
本発明は、従来技術における上記課題を解決するため、低コストで高精度に電池の充電状態を推定可能な電池状態推定装置を提供することを目的とする。
本発明は、従来技術における上記課題を解決するため、低コストで高精度に電池の充電状態を推定可能な電池状態推定装置を提供することを目的とする。
本発明による電池状態推定装置は、複数のセルを直列に接続した組電池と接続され、前記複数のセルのいずれかを対象セルとして前記対象セルの充電状態を推定する装置であって、前記対象セルの閉回路電圧の測定結果を取得するセル電圧取得部と、前記複数のセルに対して基準セルを設定し、前記基準セルの閉回路電圧および開回路電圧と、前記基準セルの充電状態を表す基準SOC値とを取得する基準セル情報取得部と、前記対象セルの閉回路電圧と、前記基準セルの閉回路電圧および開回路電圧とに基づいて、前記対象セルの仮の充電状態を表す仮SOC値を求める仮SOC演算部と、前記仮SOC値と前記基準SOC値の差分を平滑化処理した結果を用いて、前記対象セルの充電状態を表すSOC値を求めるSOC演算部と、を備える。
本発明による電池制御装置は、電池状態推定装置と、前記電池状態推定装置が求めた各セルのSOC値に基づいて、前記組電池のバランシングを制御するバランシング制御装置と、を備える。
本発明による電池制御装置は、電池状態推定装置と、前記電池状態推定装置が求めた各セルのSOC値に基づいて、前記組電池のバランシングを制御するバランシング制御装置と、を備える。
本発明によれば、低コストで高精度に電池の充電状態を推定可能な電池状態推定装置を提供することができる。
(第1の実施形態)
図1は、本発明の一実施の形態に係る電池システム1000の構成を示すブロック図である。電池システム1000は、組電池400が蓄積している電荷を外部装置に電力として供給するシステムであり、電池制御装置100、計測部200、出力部300を備えている。電池システム1000が電力を供給する対象としては、例えば電気自動車やハイブリッド自動車、電車などが考えられる。
図1は、本発明の一実施の形態に係る電池システム1000の構成を示すブロック図である。電池システム1000は、組電池400が蓄積している電荷を外部装置に電力として供給するシステムであり、電池制御装置100、計測部200、出力部300を備えている。電池システム1000が電力を供給する対象としては、例えば電気自動車やハイブリッド自動車、電車などが考えられる。
組電池400は、例えばリチウムイオン二次電池などの充放電可能な電池である。その他、ニッケル水素電池、鉛電池、電気二重層キャパシタなどの電力貯蔵機能を有するデバイスに対しても、本発明を適用することができる。本実施形態では、組電池400は、複数の単電池セル(以下、単に「セル」と称する)を直列に接続して構成されている。
計測部200は、組電池400の物理特性、例えば組電池400を構成する各セルの両端電圧であるセル電圧Vn(n=1~Nmax、ただしNmaxは組電池400の全セル数)、組電池400全体の両端電圧である総電圧Vtotal、組電池400の各セルに共通して流れる電流である電池電流I、組電池400の温度を表す電池温度Tなどを計測する機能部であり、各値を計測するセンサ、必要な電気回路などによって構成されている。なお、後述するように電池状態の推定には組電池400の内部抵抗Rも必要であるが、本実施の形態では、電池状態推定装置110において、その他の計測パラメータを用いて算出する。
出力部300は、電池制御装置100の出力を外部装置(例えば、電気自動車が備える車両制御装置などの上位装置)に対して出力する機能部である。
電池制御装置100は、組電池400の動作を制御する装置であり、電池状態推定装置110と記憶部120とを備える。
電池状態推定装置110は、計測部200により計測されたセル電圧Vn、総電圧Vtotal、電池電流I、電池温度Tと、記憶部120に格納されている組電池400の特性情報とに基づいて、組電池400の各セルのSOCを算出する。SOCの算出手法の詳細については後述する。
記憶部120は、組電池400の各セルの内部抵抗R、分極電圧Vp、充電効率、許容電流、全容量などの、あらかじめ知ることができる特性情報を記憶している。この特性情報は、充電・放電の動作別に値を個別に記憶するようにしてもよいし、充電状態や温度など、各セルの状態毎に値を個別に記憶するようにしてもよいし、各セルのあらゆる状態に共通した1つの値を記憶するようにしてもよい。
電池制御装置100および電池状態推定装置110は、その機能を実現する回路デバイスなどのハードウェアを用いて構成することができる。また、その機能を実装したソフトウェアを、CPU(Central Processing Unit)などの演算装置が実行することによって構成することもできる。後者の場合は、当該ソフトウェアは例えば記憶部120に格納される。
記憶部120は、フラッシュメモリ、EEPROM(Electrically Erasable Programmable Read-Only Memory)、磁気ディスクなどの記憶装置を用いて構成される。記憶部120は、電池状態推定装置110の外部に設けてもよいし、電池状態推定装置110の内部に備えるメモリ装置として実現してもよい。記憶部120は、取り外し可能にしてもよい。取り外し可能にした場合、記憶部120を取り替えることによって、特性情報とソフトウェアを簡単に変更することができる。また、記憶部120を複数有し、特性情報とソフトウェアを取り替え可能な記憶部120に分散させて格納することにより、特性情報とソフトウェアを小単位毎に更新することができる。
図2は、計測部200と組電池400の詳細を示すブロック図である。図2に示すように、計測部200は、セル電圧測定部210、総電圧測定部211、電流測定部212、温度測定部213を有する。組電池400では、複数のセル401が直列に接続されている。
セル電圧測定部210は、各セル401の正極および負極に接続されており、各セル401のセル電圧Vnを測定して電池状態推定装置110へ出力する。なお、セル電圧測定部210は、全てのセル401のセル電圧を測定可能な一つのハードウェアで構成してもよい。あるいは、セル401を所定の個数ごとにグループ分けし、各グループに対応する複数のハードウェアを組み合わせてセル電圧測定部210を構成してもよい。
総電圧測定部211は、組電池400において最上位(最高電位)側に接続されているセル401の正極と、組電池400において最下位(最低電位)側に接続されているセル401の負極との間に接続されており、組電池400の総電圧Vtotalを測定して電池状態推定装置110へ出力する。
電流測定部212は、組電池400に流れる電流を測定し、電池電流Iとして電池状態推定装置110へ出力する。すなわち、組電池400において全てのセル401は直列に接続されているため、電流測定部212は組電池400に流れる電流を測定することで、各セル401に共通で流れる電池電流Iを測定することができる。
温度測定部213は、組電池400に設けられた温度センサを含んで構成されており、電池温度Tを測定して電池状態推定装置110へ出力する。温度測定部213において温度センサは、組電池400を構成する複数のセル401のうち、いずれか任意のセル401に対応する位置に設置されている。例えば、当該セル401に温度センサを直接取り付けてもよいし、当該セル401の近傍に温度センサを設置してもよい。また、温度センサは一つでもよいし、別々のセル401に取り付けられた複数の温度センサを組み合わせて使用してもよい。
図3は、本発明の第1の実施形態に係る電池状態推定装置110の詳細を示す機能ブロック図である。本実施形態の電池状態推定装置110は、セル電圧取得部111、基準セル情報取得部112、仮SOC演算部113、SOC演算部114の各機能ブロックを有しており、組電池400の各セル401に対する充電状態の推定結果を、セル充電状態SOCn(n=1~Nmax)として出力する。これらの各機能ブロックは、例えば電池状態推定装置110を構成するハードウェアや、CPUが実行するソフトウェアとして実現される。
セル電圧取得部111は、組電池400が通電状態であるときに計測部200が計測した各セル401のセル電圧Vnを取得することで、各セル401の閉回路電圧(CCV)の測定結果を取得する。そして、取得した各セル401のCCVの値をCCVn(n=1~Nmax)として出力する。
基準セル情報取得部112は、組電池400を構成する複数のセル401に対して基準セルを設定し、この基準セルの閉回路電圧(CCV)および開回路電圧(OCV)と、基準セルの充電状態を表す基準SOC値とを取得する。本実施形態では、基準セル情報取得部112は、組電池400が通電状態であるときに計測部200が計測した総電圧Vtotal、電池電流Iおよび電池温度Tに基づいて、組電池400全体での各セル401のCCV、OCVおよびSOCの平均値を、基準セルのCCV、OCVおよび基準SOC値として取得する。そして、取得したこれらの値を、CCVave、OCVave、SOCaveとしてそれぞれ出力する。なお、基準セル情報取得部112によるCCVave、OCVave、SOCaveの算出方法については後述する。
仮SOC演算部113は、セル電圧取得部111から入力されるCCVnと、基準セル情報取得部112から入力されるCCVaveおよびOCVaveとに基づいて、各セル401の仮の充電状態を表す仮SOC値を求める。そして、各セル401に対して求めた仮SOC値をSOCnx(n=1~Nmax)として出力する。なお、仮SOC演算部113によるSOCnxの算出方法については後述する。
SOC演算部114は、仮SOC演算部113から入力されるSOCnxと、基準セル情報取得部112から入力されるSOCaveとに基づいて、各セル401の充電状態を表すSOC値を求める。そして、各セル401に対して求めたSOC値に基づいて、セル充電状態SOCnを出力する。なお、SOC演算部114によるSOCnの算出方法については後述する。
図4は、本発明の第1の実施形態に係る電池状態推定装置110の処理フローを示す図である。本実施形態の電池状態推定装置110は、組電池400が通電状態であるときに、所定の処理周期ごとに図4に示す処理フローを実行することで、各セル401の充電状態を推定する。
ステップS10では、基準セル情報取得部112により、組電池400の1セル当たりの平均セル電圧CCVaveを算出する。ここでは基準セル情報取得部112は、計測部200から総電圧Vtotalを取得して組電池400のセル数で除算することにより、CCVaveを算出する。そして、算出したCCVaveの値を仮SOC演算部113に出力する。
ステップS20では、基準セル情報取得部112により、組電池400の平均セル充電状態SOCaveと、組電池400の非通電時の1セル当たりの平均セル電圧OCVaveとを算出する。ここでは基準セル情報取得部112は、例えば、過去のある時点における組電池400全体での既知のSOCの値と、計測部200から取得した電池電流Iの積算結果とに基づき、組電池400全体でのSOCを求め、これをSOCaveとする。そして、記憶部120に記憶されている特性情報に含まれる組電池400全体でのOCVとSOCの関係を用いて、算出したSOCaveに対応する組電池400のOCVの値を求め、そのOCVの値を組電池400のセル数で除算することにより、OCVaveを算出する。そして、算出したOCVaveとSOCaveの値を、仮SOC演算部113とSOC演算部114にそれぞれ出力する。
あるいは、ステップS20において基準セル情報取得部112は、計測部200から取得した電池温度Tに基づいて組電池400全体での抵抗値を推定し、これとステップS10で求めたCCVaveに基づいてOCVaveを算出してもよい。この場合、記憶部120に記憶されている特性情報に含まれる組電池400全体でのOCVとSOCの関係を用いて、OCVaveの算出結果からSOCaveを算出することができる。これ以外にも、基準セル情報取得部112は任意の方法を用いて、SOCaveおよびOCVaveを算出することができる。
電池状態推定装置110は、ステップS30~S90の処理を、組電池400の各セル401を対象として順次実行する。以下では、n番目のセル401(n=1~Nmax)を対象セルとしてステップS30~S90で実行される処理の内容を具体例として説明する。
ステップS30では、セル電圧取得部111により、計測部200から対象セルのセル電圧CCVnを取得する。そして、算出したCCVnの値を仮SOC演算部113に出力する。
ステップS40では、仮SOC演算部113により、対象セルと基準セルとのセル電圧差ΔVnを算出する。ここでは仮SOC演算部113は、ステップS30でセル電圧取得部111より入力された対象セルのセル電圧CCVnから、ステップS10で基準セル情報取得部112より入力された平均セル電圧CCVaveを減算することにより、セル電圧差ΔVnを算出する。すなわち、ステップS40においてセル電圧差ΔVnは以下の式(1)で求められる。
ΔVn=CCVn-CCVave ・・・(1)
ΔVn=CCVn-CCVave ・・・(1)
ステップS50では、仮SOC演算部113により、対象セルの仮のOCVの値であるOCVnxを算出する。ここでは仮SOC演算部113は、ステップS40で算出したセル電圧差ΔVnにステップS20で算出したOCVaveを加算することにより、OCVnxを算出する。すなわち、ステップS50においてOCVnxは以下の式(2)で求められる。
OCVnx=ΔVn+OCVave ・・・(2)
OCVnx=ΔVn+OCVave ・・・(2)
ステップS60では、仮SOC演算部113により、ステップS50で算出したOCVnxをSOCの値に変換することで、対象セルの仮のSOCの値であるSOCnxを算出する。ここでは仮SOC演算部113は、記憶部120に記憶されている特性情報に含まれる各セルのOCVとSOCの関係を用いて、OCVnxをSOCnxに変換する。そして、算出したSOCnxの値をSOC演算部114に出力する。
図5は、各セルの開回路電圧OCVとSOCとの関係を示す図である。この対応関係は組電池400における各セル401の特性によって定まるものであり、記憶部120には、その対応関係を定義するデータがSOCテーブルとして予め格納されている。仮SOC演算部113は、ステップS50で算出したOCVnxをキーにしてSOCテーブルを参照することにより、対象セルの仮のSOCであるSOCnxを算出することができる。
なお、ステップS50で算出されるOCVnxは、通電時における対象セルのセル電圧CCVnから求められたセル電圧差ΔVnを用いて算出されたものである。ステップS60で対象セルの仮のSOCとして算出されるSOCnxは、このOCVnxから求められたものである。そのため、SOCnxは、セル電圧測定部210の測定誤差や、対象セルのCCVnと電池電流Iとの測定タイミングの差、各セルの内部抵抗の差(個体差、温度差、劣化状態の差など)を含んでおり、正確ではない。そこで本実施形態では、以下で説明する演算をSOC演算部114において行うことで、SOCnxから対象セルの正確なSOCを求めるようにしている。
ステップS70では、SOC演算部114により、基準セルに対する対象セルのSOCの仮の差分値ΔSOCnxを算出する。ここではSOC演算部114は、ステップS60で仮SOC演算部113から入力されたSOCnxの値から、ステップS20で基準セル情報取得部112から入力されたSOCaveの値を減算することにより、ΔSOCnxを算出する。すなわち、ステップS70においてΔSOCnxは以下の式(3)で求められる。
ΔSOCnx=SOCnx-SOCave ・・・(3)
ΔSOCnx=SOCnx-SOCave ・・・(3)
ステップS80では、SOC演算部114により、ステップS70で算出した仮の差分値ΔSOCnxを平滑化処理することで、基準セルに対する対象セルのSOCの実差分値ΔSOCnを算出する。ステップS80で行われる平滑化処理とは、仮の差分値ΔSOCnxの処理周期ごとの変動をならして滑らかにすることで、仮の差分値ΔSOCnxに含まれる誤差やノイズを低減して実差分値ΔSOCnを算出する処理である。具体的には、例えば移動平均処理や、ローパスフィルタ、カルマンフィルタ等の所定のデジタルフィルタを用いたフィルタ処理などにより、ステップS80の平滑化処理が実現される。
ステップS80で平滑化処理として行われる移動平均処理の一例を以下に説明する。移動平均数をNとし、所定の処理周期ごとに得られた仮の差分値ΔSOCnxの値をΔSOCnx(i)(iは1以上の自然数)とすると、直近の処理で得られた仮の差分値ΔSOCnx(t)に対する平滑化処理後の実差分値ΔSOCnは、以下の式(4)で求められる。ただし式(4)において、t>Nである。
ΔSOCn={ΔSOCnx(t-N)+ΔSOCnx(t-(N-1))+・・・+ΔSOCnx(t-1)+ΔSOCnx(t)}/N ・・・(4)
ΔSOCn={ΔSOCnx(t-N)+ΔSOCnx(t-(N-1))+・・・+ΔSOCnx(t-1)+ΔSOCnx(t)}/N ・・・(4)
なお、上記ではΔSOCnx(i)の各値に対して重み付けをしない単純移動平均の例を説明したが、新しい値ほど重み付けを大きくする加重移動平均により、平滑化処理を行ってもよい。その場合、線形加重移動平均、指数移動平均、修正移動平均、三角移動平均等の任意の処理手法に従って、各値の重み付けを決定することができる。
ステップS90では、SOC演算部114により、ステップS80の平滑化処理の結果を用いて、対象セルのSOC値を算出する。ここではSOC演算部114は、ステップS20で基準セル情報取得部112から入力されたSOCaveの値に、ステップS80で求められた平滑化処理後の実差分値ΔSOCnを加算することで、対象セルのSOC値であるSOCnを算出する。すなわち、ステップS90においてSOCnは以下の式(5)で求められる。
SOCn=SOCave+ΔSOCn ・・・(5)
SOCn=SOCave+ΔSOCn ・・・(5)
ステップS90で対象セルに対するSOCnを算出したら、ステップS30に戻り、S30~S90の処理を繰り返す。全てのセル401を対象セルとしてS30~S90の処理を実施できたら、電池状態推定装置110は図4の処理フローを終了する。
前述のように、ステップS60の処理で対象セルの正確なSOCの値をSOCnxとして算出するのは、各種の誤差要因から困難である。一方、組電池400が通電状態のときには、各セル401において同一の電流が流れているため、各セル401間のSOC差は安定しているという性質がある。そこで、本実施形態ではこうした性質を利用して、前述の式(3)で求められる仮の差分値ΔSOCnxに対して平滑化処理を実施することで実差分値ΔSOCnを求め、この実差分値ΔSOCnを用いて、上記の式(5)により対象セルのSOCの値を算出している。したがって、複雑な演算処理や複雑なハードウェア構成を必要とせずに、簡単な処理で正確に対象セルのSOCの値を求めることができる。
以上説明した本発明の第1の実施形態によれば、以下(1)~(3)の作用効果を奏する。
(1)電池状態推定装置110は、複数のセル401を直列に接続した組電池400と接続され、複数のセル401のいずれかを対象セルとして対象セルの充電状態を推定する装置である。電池状態推定装置110は、セル電圧取得部111と、基準セル情報取得部112と、仮SOC演算部113と、SOC演算部114とを備える。セル電圧取得部111は、対象セルの閉回路電圧CCVnの測定結果を取得する(ステップS30)。基準セル情報取得部112は、複数のセル401に対して基準セルを設定し、基準セルの閉回路電圧CCVaveおよび開回路電圧OCVaveと、基準セルの充電状態を表す基準SOC値であるSOCaveとを取得する(ステップS10、S20)。仮SOC演算部113は、対象セルの閉回路電圧CCVnと、基準セルの閉回路電圧CCVaveおよび開回路電圧OCVaveとに基づいて、対象セルの仮の充電状態を表す仮SOC値であるSOCnxを求める(ステップS40~S60)。SOC演算部114は、SOCnxとSOCaveの差分ΔSOCnxを平滑化処理した結果を用いて、対象セルの充電状態を表すSOC値であるSOCnを求める(ステップS70~S90)。このようにしたので、低コストで高精度に組電池400の各セル401の充電状態を推定可能な電池状態推定装置110を提供することができる。
(2)ステップS80で実施される平滑化処理は、移動平均処理および所定のデジタルフィルタを用いたフィルタ処理の少なくともいずれかを含むことができる。このようにすれば、SOCnxとSOCaveの差分ΔSOCnxにおける時間変化量を確実に低減し、SOCnを求める際に必要な平滑化処理後の実差分値ΔSOCnを適切かつ容易に算出することが可能となる。
(3)基準セル情報取得部112は、ステップS10、S20において、複数のセル401の閉回路電圧および充電状態の平均値であるCCVaveおよびSOCaveを、基準セルの閉回路電圧および基準SOC値としてそれぞれ取得するとともに、取得したSOCaveに基づいて、基準セルの開回路電圧としてのOCVaveを求める。このようにしたので、各セル401の個体差や、各セル401においてランダムに生じる測定誤差等を相殺しつつ、基準セルの閉回路電圧、開回路電圧および基準SOC値を容易に取得することができる。
(第2の実施形態)
次に、本発明の第2の実施形態について説明する。本実施形態では、電池状態推定装置110において、第1の実施形態とは異なる方法で平滑化処理を行い、対象セルのSOCを算出する例を説明する。なお、本実施形態に係る電池システム1000の構成や、計測部200および組電池400の構成は、図1、図2でそれぞれ説明したものと同様であるため、以下では説明を省略する。
次に、本発明の第2の実施形態について説明する。本実施形態では、電池状態推定装置110において、第1の実施形態とは異なる方法で平滑化処理を行い、対象セルのSOCを算出する例を説明する。なお、本実施形態に係る電池システム1000の構成や、計測部200および組電池400の構成は、図1、図2でそれぞれ説明したものと同様であるため、以下では説明を省略する。
図6は、本発明の第2の実施形態に係る電池状態推定装置110の詳細を示す機能ブロック図である。本実施形態の電池状態推定装置110は、第1の実施形態で説明したセル電圧取得部111、基準セル情報取得部112、仮SOC演算部113、SOC演算部114の各機能ブロックに加えて、さらに重み係数演算部115を有している。
重み係数演算部115は、組電池400が通電状態であるときに計測部200が計測した電池電流Iおよび電池温度Tに基づいて、重み係数Wを算出する。この重み係数Wは、重み係数演算部115からSOC演算部114に出力され、SOC演算部114において平滑化処理を行う際に利用される。なお、重み係数演算部115による重み係数Wの算出方法については後述する。
図7は、本発明の第2の実施形態に係る電池状態推定装置110の処理フローを示す図である。本実施形態の電池状態推定装置110は、組電池400が通電状態であるときに、所定の処理周期ごとに図7に示す処理フローを実行することで、各セル401の充電状態を推定する。
ステップS10~S60では、第1の実施形態で説明したのと同様の処理をそれぞれ実施する。
ステップS61では、重み係数演算部115により、重み係数Wを算出する。重み係数演算部115は、対象セルに流れる電流を表す電池電流Iの絶対値と、対象セルの内部抵抗値とに基づいて、例えば以下の式(6)により重み係数Wを算出する。式(6)において、Rは対象セルの内部抵抗値を表し、G1、G2は重み係数Wを用いた平滑化処理の挙動を特徴付けるための挙動係数をそれぞれ表す。なお、挙動係数G1、G2と平滑化処理の挙動との関係については後述する。
W=1/{(1+|I|×R×G2)×G1} ・・・(6)
W=1/{(1+|I|×R×G2)×G1} ・・・(6)
対象セルの内部抵抗Rは、記憶部120に予め特性情報として格納されている。内部抵抗Rは、対象セルの充電状態や電池温度Tなどに応じて異なるので、これらの組合せ毎に個別の値が記憶部120に格納されている。本実施形態では、内部抵抗Rと電池温度Tとの対応関係を定義する特性情報が抵抗テーブルとして格納されている。重み係数演算部115は、電池温度Tに基づいて、抵抗テーブルから内部抵抗Rを取得し、式(6)を用いて重み係数Wを算出する。
ステップS61で重み係数演算部115により重み係数Wが算出されると、ステップS70では、SOC演算部114により、第1の実施形態で説明したのと同様に、基準セルに対する対象セルのSOCの仮の差分値ΔSOCnxを算出する。
ステップS80では、SOC演算部114により、ステップS70で算出した仮の差分値ΔSOCnxを平滑化処理することで、基準セルに対する対象セルのSOCの実差分値ΔSOCnを算出する。ここで、本実施形態におけるSOC演算部114は、ステップS61で重み係数演算部115により算出された重み係数Wを用いて、今回の処理で得られた平滑化処理前の仮の差分値ΔSOCnxと、前回の処理で得られて対象セルのSOC値の演算に用いられた平滑化処理後の実差分値ΔSOCnとを重み付け加算することで、平滑化処理を行う。具体的には、今回の処理における平滑化処理後の実差分値をΔSOCn(t)、前回の処理における平滑化処理後の実差分値をΔSOCn(t-1)とそれぞれ表すと、以下の式(7)によりΔSOCn(t)を算出する。
ΔSOCn(t)=W×ΔSOCnx+(1-W)×ΔSOCn(t-1) ・・・(7)
ΔSOCn(t)=W×ΔSOCnx+(1-W)×ΔSOCn(t-1) ・・・(7)
ステップS80で重み係数Wを用いた平滑化処理を行うことにより実差分値ΔSOCnを算出したら、ステップS90ではその結果を用いて、前述の式(5)により、対象セルのSOC値であるSOCnを算出する。ステップS90で対象セルに対するSOCnを算出したら、第1の実施形態と同様にステップS30に戻り、S30~S90の処理を繰り返す。全てのセル401を対象セルとしてS30~S90の処理を実施できたら、電池状態推定装置110は図7の処理フローを終了する。
ここで、重み係数Wにおける挙動係数G1、G2と平滑化処理の挙動との関係について以下に説明する。挙動係数G1は、前述の式(6)の全体に係る係数であり、平滑化処理の安定性と更新頻度に関係する。具体的には、挙動係数G1の値が小さいと、式(7)で計算される実差分値ΔSOCn(t)の安定性が低下する一方で、更新頻度が向上する。その結果、処理周期ごとに算出される対象セルのSOCnの変動幅が大きくなる代わりに、実際のSOCの変化に対する追従性が高くなる。反対に、挙動係数G1の値が大きいと、式(7)で計算される実差分値ΔSOCnの安定性が向上する一方で、更新頻度が低下する。その結果、処理周期ごとに算出される対象セルのSOCnの変動幅が小さくなる代わりに、実際のSOCの変化に対する追従性が低くなる。本実施形態では、例えば1以上の値であり、かつ100などの所定値以下の値が挙動係数G1として設定される。
また、挙動係数G2は、前述の式(6)のうち電池電流Iの絶対値に係る係数であり、平滑化処理に対する電池電流Iの影響度に関係する。具体的には、挙動係数G2の値が小さいと、式(7)で計算される実差分値ΔSOCn(t)が電池電流Iから受ける影響度が低くなる。その結果、処理周期ごとに算出される対象セルのSOCnの挙動は、電池電流Iの影響を受けにくくなる。反対に、挙動係数G2の値が大きいと、式(7)で計算される実差分値ΔSOCn(t)が電池電流Iから受ける影響度が高くなる。その結果、処理周期ごとに算出される対象セルのSOCnは、電池電流Iの絶対値が大きければ安定性が高くなり、電池電流Iの絶対値が小さければ更新頻度が高くなる。ただし、通常であれば電池電流Iの絶対値が大きい期間が長期にわたって連続することはないため、挙動係数G2の値をある程度大きくしても、対象セルのSOCnについて適切な更新頻度を確保することができる。本実施形態では、例えば0以上の値が挙動係数G2として設定される。
本実施形態の電池状態推定装置110では、上記の挙動係数G1、G2の値として、例えば組電池400の各セル401の特性に応じた値を予め記憶部120に記憶している。なお、電池温度Tや電池電流I、各セル401の劣化度合いなどに応じて変化する挙動係数G1、G2の値をマップ情報として記憶部120に記憶しておき、このマップ情報を参照して挙動係数G1、G2の値を決定してもよい。
以上説明した本発明の第2の実施形態によれば、第1の実施形態で説明した(1)~(3)に加えて、さらに以下(4)の作用効果を奏する。
(4)電池状態推定装置110は、対象セルに流れる電池電流Iの絶対値と、対象セルの内部抵抗値Rとに基づいて、重み係数Wを算出する重み係数演算部115を備える。ステップS80で実施される平滑化処理に含まれる移動平均処理は、今回のSOCnxとSOCaveの仮の差分ΔSOCnxと、対象セルの前回のSOC値の演算に用いた平滑化処理後の実差分ΔSOCn(t-1)とを、式(7)により重み係数Wを用いて重み付け加算する処理である。このようにしたので、対象セルのSOC値の演算精度を向上することができる。
(第3の実施形態)
次に、本発明の第3の実施形態について説明する。本実施形態では、電池状態推定装置110において、平滑化処理の実施に対する電池電流Iの許容値を設定し、この許容値を超える電流が組電池400に流れている場合は、平滑化処理を実施しないようにする例を説明する。なお、本実施形態に係る電池システム1000の構成や、計測部200および組電池400の構成は、図1、図2でそれぞれ説明したものと同様であるため、以下では説明を省略する。
次に、本発明の第3の実施形態について説明する。本実施形態では、電池状態推定装置110において、平滑化処理の実施に対する電池電流Iの許容値を設定し、この許容値を超える電流が組電池400に流れている場合は、平滑化処理を実施しないようにする例を説明する。なお、本実施形態に係る電池システム1000の構成や、計測部200および組電池400の構成は、図1、図2でそれぞれ説明したものと同様であるため、以下では説明を省略する。
図8は、本発明の第3の実施形態に係る電池状態推定装置110の詳細を示す機能ブロック図である。本実施形態の電池状態推定装置110は、第1の実施形態で説明したセル電圧取得部111、基準セル情報取得部112、仮SOC演算部113、SOC演算部114の各機能ブロックを有しており、電池電流IがSOC演算部114にも入力される。これ以外の点では、第1の実施形態における図3の機能ブロックと同様である。
本実施形態において、SOC演算部114は、電池電流Iに基づいて平滑化処理を実施するか否かを判断する。平滑化処理を実施しないと判断した場合、SOC演算部114は、各セル401に対して前回の処理で求められたSOCの値をそのまま保持し、今回の処理結果として用いる。
図9は、本発明の第3の実施形態に係る電池状態推定装置110の処理フローを示す図である。本実施形態の電池状態推定装置110は、組電池400が通電状態であるときに、所定の処理周期ごとに図9に示す処理フローを実行することで、各セル401の充電状態を推定する。
ステップS10~S20では、第1の実施形態で説明したのと同様の処理をそれぞれ実施する。
ステップS21では、SOC演算部114により、電池電流Iの絶対値が所定の電流閾値Ithより大きいか否かを判定する。電池電流Iの絶対値が電流閾値Ithを超えていればステップS22へ進み、そうでなければステップS30に進む。
ステップS21からステップS30に進んだ場合、ステップS30~S90では、組電池400の各セル401を対象セルとして、第1の実施形態で説明したのと同様の処理をそれぞれ実施する。全てのセル401を対象セルとしてS30~S90の処理を実施できたら、電池状態推定装置110は図9の処理フローを終了する。
一方、ステップS21からステップS22に進んだ場合、ステップS22では、SOC演算部114により、前回の処理で求められた各セルのSOCの値を保持する。この場合、SOC演算部114は平滑化処理を行わない。ステップS22の処理を実行したら、電池状態推定装置110は図9の処理フローを終了する。
以上説明した本発明の第3の実施形態によれば、第1の実施形態で説明した(1)~(3)に加えて、さらに以下(5)の作用効果を奏する。
(5)SOC演算部114は、対象セルに流れる電池電流Iの絶対値が所定値を超えるときには、平滑化処理を行わずに前回のSOC値を保持する。このようにしたので、対象セルに大きな電流が流れており、そのため対象セルの内部抵抗の誤差に応じてセル電圧取得部111により取得されるセル電圧CCVnの誤差が大きくなるときには、平滑化処理を実施しないようにして、対象セルのSOC値の演算精度を向上することができる。
なお、以上説明した第3の実施形態では、対象セルに流れる電池電流Iの絶対値が所定値を超えるときに、平滑化処理を行わずに前回のSOC値を保持するようにしたが、これ以外の条件を用いて平滑化処理の有無を判断することも可能である。例えば、対象セルに流れる電池電流Iの時間変化量を測定し、その絶対値が所定値を超えるときに、平滑化処理を行わずに前回のSOC値を保持してもよい。このようにしても、上記(5)と同様の作用効果を奏することができる。さらに別の条件を用いて平滑化処理の有無を判断してもよい。
(第4の実施形態)
次に、本発明の第4の実施形態について説明する。本実施形態では、電池状態推定装置110において、SOC演算部114で求められた平滑化処理後の実差分値ΔSOCnが急変したか否かを判断し、急変したと判断した場合にはその変化量を制限する変化量制限処理を実施する例を説明する。なお、本実施形態に係る電池システム1000の構成や、計測部200および組電池400の構成や、電池状態推定装置110の機能ブロックは、図1~図3でそれぞれ説明したものと同様であるため、以下では説明を省略する。
次に、本発明の第4の実施形態について説明する。本実施形態では、電池状態推定装置110において、SOC演算部114で求められた平滑化処理後の実差分値ΔSOCnが急変したか否かを判断し、急変したと判断した場合にはその変化量を制限する変化量制限処理を実施する例を説明する。なお、本実施形態に係る電池システム1000の構成や、計測部200および組電池400の構成や、電池状態推定装置110の機能ブロックは、図1~図3でそれぞれ説明したものと同様であるため、以下では説明を省略する。
図10は、本発明の第4の実施形態に係る電池状態推定装置110の処理フローを示す図である。本実施形態の電池状態推定装置110は、組電池400が通電状態であるときに、所定の処理周期ごとに図10に示す処理フローを実行することで、各セル401の充電状態を推定する。
ステップS10~S80では、第1の実施形態で説明したのと同様の処理をそれぞれ実施する。
ステップS81では、SOC演算部114により、ステップS80で算出した平滑化処理後の実差分値ΔSOCnが所定の差分閾値Sthより大きいか否かを判定する。実差分値ΔSOCnが差分閾値Sthを超えていればステップS82へ進み、そうでなければステップS90に進む。
ステップS81からステップS82に進んだ場合、ステップS82では、ステップS80で算出した平滑化処理後の実差分値ΔSOCnを差分閾値Sthに置き換える。これにより、平滑化処理後の実差分値ΔSOCnが差分閾値Sth以下となるように制限する。ステップS82の処理を実施したら、SOC演算部114は、差分閾値Sthで置き換えられた制限後の実差分値ΔSOCnを用いてステップS90の処理を実行することで、対象セルのSOC値であるSOCnを算出する。
全てのセル401を対象セルとしてS30~S90の処理を実施できたら、電池状態推定装置110は図10の処理フローを終了する。
以上説明した本発明の第4の実施形態によれば、第1の実施形態で説明した(1)~(3)に加えて、さらに以下(6)の作用効果を奏する。
(6)SOC演算部114は、平滑化処理後の実差分値ΔSOCnを所定値以下に制限する変化量制限処理を行う。このようにしたので、複数のセル401が直列に接続された組電池400において実際には生じることがないΔSOCnの急変が測定誤差等により誤って算出されたときには、これを制限して、対象セルのSOC値の演算精度を向上することができる。
(第5の実施形態)
次に、本発明の第5の実施形態について説明する。前述の第1の実施形態では、電池状態推定装置110において、組電池400全体での各セル401のCCV、OCVおよびSOCの平均値を、基準セルのCCV、OCVおよびSOC値として取得する例を説明した。これに対して、以下に説明する第5の実施形態では、特定のセル401を基準セルとして設定し、その基準セルのCCV、OCVおよびSOC値を取得する例を説明する。なお、本実施形態に係る電池システム1000の構成や、計測部200および組電池400の構成は、図1、図2でそれぞれ説明したものと同様であるため、以下では説明を省略する。
次に、本発明の第5の実施形態について説明する。前述の第1の実施形態では、電池状態推定装置110において、組電池400全体での各セル401のCCV、OCVおよびSOCの平均値を、基準セルのCCV、OCVおよびSOC値として取得する例を説明した。これに対して、以下に説明する第5の実施形態では、特定のセル401を基準セルとして設定し、その基準セルのCCV、OCVおよびSOC値を取得する例を説明する。なお、本実施形態に係る電池システム1000の構成や、計測部200および組電池400の構成は、図1、図2でそれぞれ説明したものと同様であるため、以下では説明を省略する。
図11は、本発明の第5の実施形態に係る電池状態推定装置110の詳細を示す機能ブロック図である。本実施形態の電池状態推定装置110は、第1の実施形態で説明したセル電圧取得部111、基準セル情報取得部112、仮SOC演算部113、SOC演算部114の各機能ブロックを有している。
本実施形態において、基準セル情報取得部112は、組電池400に含まれる複数のセル401のうち特定のセル401を基準セルに設定し、組電池400が通電状態であるときに計測部200が計測した当該基準セルのセル電圧Vrefと、電池電流Iおよび電池温度Tとを取得する。そして、取得したセル電圧Vrefを基準セルの閉回路電圧(CCV)を表す基準セル電圧CCVrefとして出力する。さらに、取得したセル電圧Vref、電池電流Iおよび電池温度Tに基づいて、当該セル基準セルの開回路電圧(OCV)とSOC値を算出し、これらの算出結果を、基準セルの開回路電圧OCVrefおよび基準セル充電状態SOCrefとしてそれぞれ出力する。
なお、基準セル情報取得部112では、OCVやSOCの値をなるべく高精度に取得可能なセル401を基準セルとすることが好ましい。例えば、温度測定部213における温度センサの設置位置に対応するセル401を基準セルとすることで、当該セル401の温度を正確に測定できるため、当該セル401のOCVを高精度に算出できる。また、そのOCVからSOCを高精度に算出できる。
あるいは、セル電圧取得部111によって所定の周期ごとにCCVが順次測定される組電池400の複数のセル401のうち、電池電流Iの測定タイミングに最も近いタイミングでCCVが測定されたセル401を、基準セルとしてもよい。このようにすれば、電池電流Iの測定タイミングと、当該セル401のCCVの測定タイミングとが略同期するため、下記の等価回路式(8)を用いて、当該セル401のCCVからOCVを高精度に算出できる。また、そのOCVからSOCを高精度に算出できる。
CCV=OCV×I×R ・・・(8)
CCV=OCV×I×R ・・・(8)
なお、上記で説明した例以外にも、基準セル情報取得部112は任意のセル401を基準セルに設定し、その基準セルに対してCCVref、OCVrefおよびSOCrefを取得することができる。
図12は、本発明の第5の実施形態に係る電池状態推定装置110の処理フローを示す図である。本実施形態の電池状態推定装置110は、組電池400が通電状態であるときに、所定の処理周期ごとに図12に示す処理フローを実行することで、各セル401の充電状態を推定する。
ステップS10Aでは、基準セル情報取得部112により、基準セル電圧CCVrefを取得する。ここでは基準セル情報取得部112は、前述のような観点に基づいて組電池400の複数のセル401の中から予め設定された基準セルを選択し、その基準セルのセル電圧の測定結果を計測部200から取得する。そして、取得したセル電圧の値を基準セル電圧CCVrefとして仮SOC演算部113に出力する。
ステップS20Aでは、基準セル情報取得部112により、基準セル充電状態SOCrefと、基準セルの非通電時のセル電圧OCVrefとを算出する。ここでは基準セル情報取得部112は、例えば、計測部200から取得した電池温度Tに基づいて基準セルの抵抗値Rを推定し、前述の等価回路式(8)を用いて、ステップS10Aで取得したCCVrefに対応するOCVrefを求める。そして、記憶部120に記憶されている特性情報に含まれる基準セルのOCVとSOCの関係を用いて、OCVrefの算出結果からSOCrefを算出することができる。なお、他の方法でSOCrefとOCVrefをそれぞれ算出してもよい。いずれかの方法でSOCrefとOCVrefを算出できたら、基準セル情報取得部112は、算出したOCVrefとSOCrefの値を、仮SOC演算部113とSOC演算部114にそれぞれ出力する。
ステップS30において第1の実施形態で説明したのと同様の処理を実施した後、ステップS40Aでは、仮SOC演算部113により、対象セルと基準セルとのセル電圧差ΔVnを算出する。ここでは仮SOC演算部113は、ステップS30でセル電圧取得部111より入力された対象セルのセル電圧CCVnから、ステップS10Aで基準セル情報取得部112より入力された基準セル電圧CCVrefを減算することにより、セル電圧差ΔVnを算出する。すなわち、ステップS40Aにおいてセル電圧差ΔVnは以下の式(1A)で求められる。
ΔVn=CCVn-CCVref ・・・(1A)
ΔVn=CCVn-CCVref ・・・(1A)
ステップS50Aでは、仮SOC演算部113により、対象セルの仮のOCVの値であるOCVnxを算出する。ここでは仮SOC演算部113は、ステップS40Aで算出したセル電圧差ΔVnにステップS20Aで算出したOCVrefを加算することにより、OCVnxを算出する。すなわち、ステップS50AにおいてOCVnxは以下の式(2A)で求められる。
OCVnx=ΔVn+OCVref ・・・(2A)
OCVnx=ΔVn+OCVref ・・・(2A)
ステップS60において第1の実施形態で説明したのと同様の処理を実施した後、ステップS70Aでは、SOC演算部114により、基準セルに対する対象セルのSOCの仮の差分値ΔSOCnxを算出する。ここではSOC演算部114は、ステップS60で仮SOC演算部113から入力されたSOCnxの値から、ステップS20Aで基準セル情報取得部112から入力されたSOCrefの値を減算することにより、ΔSOCnxを算出する。すなわち、ステップS70AにおいてΔSOCnxは以下の式(3A)で求められる。
ΔSOCnx=SOCnx-SOCref ・・・(3A)
ΔSOCnx=SOCnx-SOCref ・・・(3A)
ステップS80において第1の実施形態で説明したのと同様の処理を実施した後、ステップS90Aでは、SOC演算部114により、ステップS80の平滑化処理の結果を用いて、対象セルのSOC値を算出する。ここではSOC演算部114は、ステップS20Aで基準セル情報取得部112から入力されたSOCrefの値に、ステップS80で求められた平滑化処理後の実差分値ΔSOCnを加算することで、対象セルのSOC値であるSOCnを算出する。すなわち、ステップS90AにおいてSOCnは以下の式(5A)で求められる。
SOCn=SOCref+ΔSOCn ・・・(5A)
SOCn=SOCref+ΔSOCn ・・・(5A)
ステップS90Aで対象セルに対するSOCnを算出したら、ステップS30に戻り、S30~S90Aの処理を繰り返す。全てのセル401を対象セルとしてS30~S90Aの処理を実施できたら、電池状態推定装置110は図12の処理フローを終了する。
以上説明した本発明の第5の実施形態によれば、第1の実施形態で説明した(1)~(3)に加えて、さらに以下(7)の作用効果を奏する。
(7)組電池400には、複数のセル401の少なくともいずれか一つに対応する位置に温度センサが設置されている。基準セル情報取得部112は、温度センサの設置位置に対応するセル401を基準セルとする。あるいは、セル電圧取得部111は、所定の周期ごとに順次測定された組電池400の各セル401の閉回路電圧を対象セルの閉回路電圧CCVnとして取得する。このとき、基準セル情報取得部112は、組電池400の複数のセル401のうち、電池電流Iの測定タイミングに最も近いタイミングで閉回路電圧が測定されたセル401を、基準セルとする。このようにしたので、基準セルの閉回路電圧CCVref、開回路電圧OCVrefおよび基準セル充電状態SOCrefを正確に取得することができる。
(第6の実施形態)
次に、本発明の第6の実施形態について説明する。本実施形態では、電池状態推定装置110による各セルのSOCの算出結果に基づいて、組電池400の各セルのバランシングを実施する電池システムの例を説明する。
次に、本発明の第6の実施形態について説明する。本実施形態では、電池状態推定装置110による各セルのSOCの算出結果に基づいて、組電池400の各セルのバランシングを実施する電池システムの例を説明する。
図13は、本発明の第6の実施形態に係る電池システム1000Aの構成を示すブロック図である。本実施形態の電池システム1000Aは、電池制御装置100A、計測部200、出力部300、組電池400、バランシング部500を備えている。なお、計測部200、出力部300および組電池400については、第1の実施形態で説明した電池システム1000のものとそれぞれ同じであるため、以下では説明を省略する。
電池制御装置100Aは、組電池400の動作を制御する装置であり、電池状態推定装置110、記憶部120およびバランシング制御装置130を備える。電池状態推定装置110は、組電池400の各セルのSOCを算出する装置であり、第1~第5の各実施形態で説明したもののいずれかとすることができる。記憶部120は、第1の実施形態で説明したように、組電池400の各セルの内部抵抗R、分極電圧Vp、充電効率、許容電流、全容量などの、あらかじめ知ることができる特性情報を記憶している。
バランシング制御装置130は、電池状態推定装置110が求めた各セルのSOC値に基づいて、各セルの放電時間を制御するための信号をバランシング部500に出力する。バランシング部500は、組電池400の各セルに対応してそれぞれ設けられた複数のバランシングスイッチ(不図示)を有している。各バランシングスイッチの動作は、バランシング制御装置130からの入力信号に応じて制御される。これにより、組電池400のバランシング制御が行われ、各セルのSOCのバラツキが抑制される。
以上説明した本発明の第6の実施形態によれば、第1~第5の各実施形態で説明した(1)~(7)に加えて、さらに以下(8)の作用効果を奏する。
(8)電池制御装置100Aは、電池状態推定装置110と、電池状態推定装置110が求めた各セルのSOC値に基づいて、組電池400のバランシングを制御するバランシング制御装置130とを備える。このようにしたので、電池状態推定装置110による各セルのSOCの算出結果を利用して、組電池400における各セルのバラツキを確実に低減することができる。
なお、以上説明した第1~第6の各実施形態は、任意に組み合わせてもよい。
以上説明した各実施形態や各種変形例はあくまで一例であり、発明の特徴が損なわれない限り、本発明はこれらの内容に限定されるものではない。また、上記では種々の実施形態や変形例を説明したが、本発明はこれらの内容に限定されるものではない。本発明の技術的思想の範囲内で考えられるその他の態様も本発明の範囲内に含まれる。
次の優先権基礎出願の開示内容は引用文としてここに組み込まれる。
日本国特許出願2018-142471(2018年7月30日出願)
日本国特許出願2018-142471(2018年7月30日出願)
100…電池制御装置、
110…電池状態推定装置、
111…セル電圧取得部、
112…基準セル情報取得部、
113…仮SOC演算部、
114…SOC演算部、
115…重み係数演算部、
120…記憶部、
130…バランシング制御装置、
200…計測部、
210…セル電圧測定部、
211…総電圧測定部、
212…電流測定部、
213…温度測定部、
300…出力部、
400…組電池、
401…セル、
500…バランシング部、
1000…電池システム
110…電池状態推定装置、
111…セル電圧取得部、
112…基準セル情報取得部、
113…仮SOC演算部、
114…SOC演算部、
115…重み係数演算部、
120…記憶部、
130…バランシング制御装置、
200…計測部、
210…セル電圧測定部、
211…総電圧測定部、
212…電流測定部、
213…温度測定部、
300…出力部、
400…組電池、
401…セル、
500…バランシング部、
1000…電池システム
Claims (10)
- 複数のセルを直列に接続した組電池と接続され、前記複数のセルのいずれかを対象セルとして前記対象セルの充電状態を推定する装置であって、
前記対象セルの閉回路電圧の測定結果を取得するセル電圧取得部と、
前記複数のセルに対して基準セルを設定し、前記基準セルの閉回路電圧および開回路電圧と、前記基準セルの充電状態を表す基準SOC値とを取得する基準セル情報取得部と、
前記対象セルの閉回路電圧と、前記基準セルの閉回路電圧および開回路電圧とに基づいて、前記対象セルの仮の充電状態を表す仮SOC値を求める仮SOC演算部と、
前記仮SOC値と前記基準SOC値の差分を平滑化処理した結果を用いて、前記対象セルの充電状態を表すSOC値を求めるSOC演算部と、を備える電池状態推定装置。 - 請求項1に記載の電池状態推定装置において、
前記SOC演算部は、前記対象セルに流れる電流の絶対値が所定値を超えるときには、前記平滑化処理を行わずに前回の前記SOC値を保持する電池状態推定装置。 - 請求項1に記載の電池状態推定装置において、
前記SOC演算部は、前記対象セルに流れる電流の時間変化量の絶対値が所定値を超えるときには、前記平滑化処理を行わずに前回の前記SOC値を保持する電池状態推定装置。 - 請求項1から3のいずれか一項に記載の電池状態推定装置において、
前記平滑化処理は、移動平均処理および所定のデジタルフィルタを用いたフィルタ処理の少なくともいずれかを含む電池状態推定装置。 - 請求項4に記載の電池状態推定装置において、
前記対象セルに流れる電流の絶対値と、前記対象セルの内部抵抗値とに基づいて、重み係数を算出する重み係数演算部を備え、
前記移動平均処理は、今回の前記差分と、前回の前記SOC値の演算に用いた平滑化処理後の前記差分とを、前記重み係数を用いて重み付け加算する処理である電池状態推定装置。 - 請求項1から3のいずれか一項に記載の電池状態推定装置において、
前記SOC演算部は、平滑化処理後の前記差分を所定値以下に制限する変化量制限処理を行う電池状態推定装置。 - 請求項1から3のいずれか一項に記載の電池状態推定装置において、
前記基準セル情報取得部は、前記複数のセルの閉回路電圧および充電状態の平均値を、前記基準セルの閉回路電圧および前記基準SOC値としてそれぞれ取得するとともに、取得した前記基準SOC値に基づいて前記基準セルの開回路電圧を求める電池状態推定装置。 - 請求項1から3のいずれか一項に記載の電池状態推定装置において、
前記組電池には、前記複数のセルの少なくともいずれか一つに対応する位置に温度センサが設置されており、
前記基準セル情報取得部は、前記温度センサの設置位置に対応するセルを前記基準セルとする電池状態推定装置。 - 請求項1から3のいずれか一項に記載の電池状態推定装置において、
前記セル電圧取得部は、所定の周期ごとに順次測定された前記組電池の各セルの閉回路電圧を前記対象セルの閉回路電圧として取得し、
前記基準セル情報取得部は、前記複数のセルのうち、前記組電池に流れる電流の測定タイミングに最も近いタイミングで閉回路電圧が測定されたセルを、前記基準セルとする電池状態推定装置。 - 請求項1から9のいずれか一項に記載の電池状態推定装置と、
前記電池状態推定装置が求めた各セルのSOC値に基づいて、前記組電池のバランシングを制御するバランシング制御装置と、を備える電池制御装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP19844424.2A EP3832331B1 (en) | 2018-07-30 | 2019-03-18 | Cell state estimation device and cell control device |
| JP2020534048A JP6947937B2 (ja) | 2018-07-30 | 2019-03-18 | 電池状態推定装置、電池制御装置 |
| CN201980050862.6A CN112912747B (zh) | 2018-07-30 | 2019-03-18 | 电池状态推算装置和电池控制装置 |
| US17/264,440 US12117497B2 (en) | 2018-07-30 | 2019-03-18 | Battery status estimation apparatus and battery control apparatus |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018142471 | 2018-07-30 | ||
| JP2018-142471 | 2018-07-30 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2020026509A1 true WO2020026509A1 (ja) | 2020-02-06 |
Family
ID=69232178
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2019/011056 Ceased WO2020026509A1 (ja) | 2018-07-30 | 2019-03-18 | 電池状態推定装置、電池制御装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US12117497B2 (ja) |
| EP (1) | EP3832331B1 (ja) |
| JP (1) | JP6947937B2 (ja) |
| CN (1) | CN112912747B (ja) |
| WO (1) | WO2020026509A1 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2022177291A1 (ko) * | 2021-02-16 | 2022-08-25 | 주식회사 엘지에너지솔루션 | 배터리 관리 시스템, 배터리 팩, 에너지 저장 시스템 및 배터리 관리 방법 |
| JP2023024201A (ja) * | 2021-08-06 | 2023-02-16 | トヨタ自動車株式会社 | バッテリ管理装置および方法 |
| KR102877721B1 (ko) * | 2024-12-31 | 2025-10-31 | (주)모아소프트 | 차량용 배터리 상태 추정 값과 실제 값을 이용한 파라미터 보정 방법 |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102521576B1 (ko) * | 2019-03-18 | 2023-04-12 | 주식회사 엘지에너지솔루션 | 배터리 관리 장치 |
| CN113884894B (zh) * | 2021-11-15 | 2023-07-21 | 长沙理工大学 | 基于外部特性的电池簇不一致性在线监测方法 |
| KR20250037010A (ko) * | 2023-09-07 | 2025-03-17 | 주식회사 엘지에너지솔루션 | 배터리 진단 장치 및 그의 동작 방법 |
| CN117007979B (zh) * | 2023-10-07 | 2024-07-09 | 深圳市众航物联网有限公司 | 基于数据驱动的电源输出掉电异常预警方法 |
| EP4624954A1 (de) * | 2024-03-28 | 2025-10-01 | Siemens Aktiengesellschaft | Verfahren zum bestimmen zumindest einer spezifischen testspannung für eine batteriezelle, computerprogrammprodukt, lesbares speichermedium sowie messvorrichtung |
| DE102024001682A1 (de) * | 2024-05-24 | 2025-11-27 | Mercedes-Benz Group AG | Verfahren zur Ermittlung des Ladezustands von Batteriezellen, Recheneinheit, Batterie und Fahrzeug |
| CN119030106B (zh) * | 2024-10-29 | 2025-06-03 | 深圳市德兰明海新能源股份有限公司 | 串联电芯均衡方法、装置以及电子设备 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005331482A (ja) * | 2004-05-21 | 2005-12-02 | Fuji Heavy Ind Ltd | 蓄電デバイスの残存容量演算装置 |
| JP2011041452A (ja) * | 2009-07-17 | 2011-02-24 | Toshiba Corp | 組電池装置及び車両 |
| JP2011530697A (ja) | 2008-08-08 | 2011-12-22 | エルジー・ケム・リミテッド | バッテリーセルの電圧変化挙動を用いたセルバランス装置及び方法 |
| JP2013253857A (ja) * | 2012-06-07 | 2013-12-19 | Calsonic Kansei Corp | 組電池のセルの状態推定装置 |
| JP2018100841A (ja) * | 2016-12-19 | 2018-06-28 | トヨタ自動車株式会社 | 蓄電システム |
| JP2018142471A (ja) | 2017-02-28 | 2018-09-13 | 国立研究開発法人産業技術総合研究所 | マーキング方法、マーキング装置、およびマーキングされた物品 |
Family Cites Families (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4925060B2 (ja) * | 2007-10-19 | 2012-04-25 | 本田技研工業株式会社 | 電池状態推定装置 |
| JP5133926B2 (ja) * | 2009-03-26 | 2013-01-30 | 株式会社日立製作所 | 車両用電池システム |
| JP5020307B2 (ja) * | 2009-12-07 | 2012-09-05 | 三菱電機株式会社 | 電気負荷の駆動制御装置 |
| US9263773B2 (en) * | 2010-01-19 | 2016-02-16 | Gs Yuasa International Ltd. | Secondary battery state of charge determination apparatus, and method of determining state of charge of secondary battery |
| JP2014211307A (ja) * | 2011-08-30 | 2014-11-13 | 三洋電機株式会社 | バッテリシステム、充電状態推定装置、電動車両、移動体、電力貯蔵装置および電源装置 |
| JP6065561B2 (ja) * | 2012-03-08 | 2017-01-25 | 日産自動車株式会社 | 二次電池の制御装置およびsoc検出方法 |
| JP5863603B2 (ja) * | 2012-08-24 | 2016-02-16 | 日立オートモティブシステムズ株式会社 | 電池状態推定装置、電池制御装置、電池システム、電池状態推定方法 |
| JP6101714B2 (ja) * | 2013-01-25 | 2017-03-22 | 日立オートモティブシステムズ株式会社 | 電池制御装置、電池システム |
| WO2014188562A1 (ja) * | 2013-05-23 | 2014-11-27 | 日立オートモティブシステムズ株式会社 | 電池制御装置 |
| WO2015132891A1 (ja) * | 2014-03-05 | 2015-09-11 | 株式会社日立製作所 | 二次電池モジュール |
| KR101779941B1 (ko) * | 2014-12-29 | 2017-09-19 | 주식회사 엘지화학 | 배터리 충전 상태 측정 장치 및 방법 |
| CN107431367B (zh) * | 2015-03-02 | 2020-08-11 | 日本汽车能源株式会社 | 电池控制装置和车辆系统 |
| WO2016158396A1 (ja) * | 2015-03-31 | 2016-10-06 | 日立オートモティブシステムズ株式会社 | 電池制御装置、および電動車両システム |
| JP6383704B2 (ja) * | 2015-07-02 | 2018-08-29 | 日立オートモティブシステムズ株式会社 | 電池制御装置 |
| JP6787660B2 (ja) * | 2015-12-10 | 2020-11-18 | ビークルエナジージャパン株式会社 | 電池制御装置、動力システム |
| US10845417B2 (en) * | 2016-01-29 | 2020-11-24 | Vehicle Energy Japan, Inc. | Battery state estimation device, battery control device, battery system, battery state estimation method |
| JP6588632B2 (ja) * | 2016-05-18 | 2019-10-09 | 日立オートモティブシステムズ株式会社 | 電池制御装置 |
| WO2018043222A1 (ja) * | 2016-08-30 | 2018-03-08 | パナソニックIpマネジメント株式会社 | 管理装置、及び蓄電システム |
| WO2018089763A2 (en) * | 2016-11-10 | 2018-05-17 | Camx Power, L.L.C. | Systems and processes for assessing electrochemical cell quality |
| JP7185437B2 (ja) * | 2018-07-30 | 2022-12-07 | ビークルエナジージャパン株式会社 | 電池管理装置、電池管理方法、電力貯蔵システム |
| JP7089049B2 (ja) * | 2018-10-12 | 2022-06-21 | ビークルエナジージャパン株式会社 | 電池制御装置 |
| CN112969929B (zh) * | 2018-10-26 | 2024-06-21 | 日本汽车能源株式会社 | 电池控制装置 |
-
2019
- 2019-03-18 WO PCT/JP2019/011056 patent/WO2020026509A1/ja not_active Ceased
- 2019-03-18 US US17/264,440 patent/US12117497B2/en active Active
- 2019-03-18 JP JP2020534048A patent/JP6947937B2/ja active Active
- 2019-03-18 EP EP19844424.2A patent/EP3832331B1/en active Active
- 2019-03-18 CN CN201980050862.6A patent/CN112912747B/zh active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005331482A (ja) * | 2004-05-21 | 2005-12-02 | Fuji Heavy Ind Ltd | 蓄電デバイスの残存容量演算装置 |
| JP2011530697A (ja) | 2008-08-08 | 2011-12-22 | エルジー・ケム・リミテッド | バッテリーセルの電圧変化挙動を用いたセルバランス装置及び方法 |
| JP2011041452A (ja) * | 2009-07-17 | 2011-02-24 | Toshiba Corp | 組電池装置及び車両 |
| JP2013253857A (ja) * | 2012-06-07 | 2013-12-19 | Calsonic Kansei Corp | 組電池のセルの状態推定装置 |
| JP2018100841A (ja) * | 2016-12-19 | 2018-06-28 | トヨタ自動車株式会社 | 蓄電システム |
| JP2018142471A (ja) | 2017-02-28 | 2018-09-13 | 国立研究開発法人産業技術総合研究所 | マーキング方法、マーキング装置、およびマーキングされた物品 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3832331A4 |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2022177291A1 (ko) * | 2021-02-16 | 2022-08-25 | 주식회사 엘지에너지솔루션 | 배터리 관리 시스템, 배터리 팩, 에너지 저장 시스템 및 배터리 관리 방법 |
| US12474380B2 (en) | 2021-02-16 | 2025-11-18 | Lg Energy Solution, Ltd. | Battery management system, battery pack, energy storage system and battery management method |
| JP2023024201A (ja) * | 2021-08-06 | 2023-02-16 | トヨタ自動車株式会社 | バッテリ管理装置および方法 |
| JP7619205B2 (ja) | 2021-08-06 | 2025-01-22 | トヨタ自動車株式会社 | バッテリ管理装置および方法 |
| KR102877721B1 (ko) * | 2024-12-31 | 2025-10-31 | (주)모아소프트 | 차량용 배터리 상태 추정 값과 실제 값을 이용한 파라미터 보정 방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3832331A1 (en) | 2021-06-09 |
| US12117497B2 (en) | 2024-10-15 |
| CN112912747B (zh) | 2023-07-11 |
| EP3832331B1 (en) | 2023-08-02 |
| JPWO2020026509A1 (ja) | 2021-04-08 |
| US20210311127A1 (en) | 2021-10-07 |
| CN112912747A (zh) | 2021-06-04 |
| JP6947937B2 (ja) | 2021-10-13 |
| EP3832331A4 (en) | 2022-05-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6947937B2 (ja) | 電池状態推定装置、電池制御装置 | |
| JP7292404B2 (ja) | バッテリ健全状態の推定方法 | |
| KR102035678B1 (ko) | 배터리 노화상태 산출 방법 및 장치 | |
| JP6509725B2 (ja) | バッテリの充電状態の推定 | |
| US8046181B2 (en) | Apparatus and method for estimating state of health of battery based on battery voltage variation pattern | |
| JP7036605B2 (ja) | 組電池の状態推定装置及び組電池の状態推定方法 | |
| JP2020508442A (ja) | バッテリー充電状態推定装置及び方法 | |
| KR102572652B1 (ko) | 배터리의 충전상태를 추정하는 방법 | |
| US20140055100A1 (en) | Battery state estimation system, battery control system, battery system, and battery state estimation method | |
| CN110914696A (zh) | 用于在电池的操作期间估计电池开路池格电压、充电状态以及健康状态的方法和系统 | |
| JP7552995B2 (ja) | エネルギー貯蔵システムの充電容量算出装置及び方法 | |
| KR102722271B1 (ko) | 배터리 관리 장치, 배터리 관리 방법 및 배터리팩 | |
| JP6867478B2 (ja) | 電池制御装置および車両システム | |
| CN113853524B (zh) | 用于估计电池状态的方法 | |
| JP2015038444A (ja) | 二次電池の残量推定方法及びその装置 | |
| JP6895541B2 (ja) | 二次電池監視装置、二次電池状態演算装置および二次電池状態推定方法 | |
| CN116559689B (zh) | 使用过电位的等效恒定电流模型的电池状态估计 | |
| CN116699431A (zh) | 基于多个滞后渡越速率的电池状态估计 | |
| KR102859090B1 (ko) | 배터리 soh 추정 방법 및 이를 적용한 배터리 팩 | |
| JP5851514B2 (ja) | 電池制御装置、二次電池システム | |
| JP7089049B2 (ja) | 電池制御装置 | |
| WO2018025350A1 (ja) | 推定装置、推定プログラムおよび充電制御装置 | |
| JP2021144886A (ja) | 電池管理装置、電池管理システム及び電池管理方法 | |
| WO2018029849A1 (ja) | 推定装置、推定プログラムおよび充電制御装置 | |
| JP6827527B2 (ja) | 電池制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 19844424 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2020534048 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2019844424 Country of ref document: EP Effective date: 20210301 |