WO2020255260A1 - 一般化データ生成装置、推定装置、一般化データ生成方法、推定方法、一般化データ生成プログラム、及び推定プログラム - Google Patents
一般化データ生成装置、推定装置、一般化データ生成方法、推定方法、一般化データ生成プログラム、及び推定プログラム Download PDFInfo
- Publication number
- WO2020255260A1 WO2020255260A1 PCT/JP2019/024121 JP2019024121W WO2020255260A1 WO 2020255260 A1 WO2020255260 A1 WO 2020255260A1 JP 2019024121 W JP2019024121 W JP 2019024121W WO 2020255260 A1 WO2020255260 A1 WO 2020255260A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- generalized
- data
- general
- conditions
- data group
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images





Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/08—Learning methods
- G06N3/088—Non-supervised learning, e.g. competitive learning
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/02—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to ambient conditions
- B60W40/06—Road conditions
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N20/00—Machine learning
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/04—Architecture, e.g. interconnection topology
- G06N3/045—Combinations of networks
- G06N3/0455—Auto-encoder networks; Encoder-decoder networks
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/04—Architecture, e.g. interconnection topology
- G06N3/0464—Convolutional networks [CNN, ConvNet]
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/08—Learning methods
- G06N3/09—Supervised learning
Definitions
- the disclosed technology relates to a generalized data generator, an estimator, a generalized data generation method, an estimation method, a generalized data generation program, and an estimation program.
- Non-Patent Documents 1 and 2 disclose Technology for estimating the condition of the road surface (steps, slopes, etc.) on which the moving object moves is being studied using sensors mounted on moving objects such as automobiles, pedestrians, and wheelchairs that move on the road surface such as sidewalks or driveways.
- the above-mentioned road surface condition estimation is often performed using a trained model constructed by machine learning using training data.
- the road surface condition is not unified, there is a problem that the amount of learning data becomes enormous because the learning data of the same road surface as the road surface in the data for which the road surface condition is to be estimated is required. That is, if the data to be estimated is, for example, a smooth road surface, the learning data of the smooth road surface is required, and if the data to be estimated is, for example, a rough road surface, the learning data of the rough road surface is required. Since data of various conditions are input to the trained model, training data of each of these smooth road surfaces and rough road surfaces is required for highly accurate estimation, and the amount of training data is large. Increase.
- the disclosed technology has been made in view of the above points, and is a generalized data generator, an estimation device, and a generalization that can accurately estimate the state of an object while suppressing the amount of training data. It is an object of the present invention to provide a data generation method, an estimation method, a generalized data generation program, and an estimation program.
- the generalized data generator uses a general learning data group, which is a set of data satisfying the general conditions, as an input among a plurality of types of conditions.
- a learning unit that learns a generalized model for learning to obtain data satisfying the general conditions and outputs a trained generalized model by predetermined machine learning, and one of the plurality of types of conditions.
- Generalized data generation that uses an input data group that is a set of satisfied data and the trained generalized model to generate a generalized input data group that is generalized so that the input data group satisfies the general condition. It has a department.
- the estimation device is a target by predetermined machine learning by inputting a general learning data group which is a set of data satisfying general conditions among a plurality of types of conditions.
- a learning unit that learns a learning state estimation model for estimating the state of an object and outputs a learned state estimation model, an input data group that is a set of data satisfying any of the plurality of types of conditions, and the above.
- the generalized input data group Using the trained generalized model obtained by machine learning the general training data group, the generalized input data group generalized so that the input data group satisfies the general condition, and the trained generalized input data group. It is provided with an estimation unit that estimates the state of the object using a state estimation model.
- the generalized data generation method is a general learning in which the learning unit is a set of data satisfying the general condition among a plurality of types of conditions.
- the generalized model for learning for obtaining the data satisfying the above general conditions is learned by the predetermined machine learning, the trained generalized model is output, and the generalized data generation unit generates the data.
- a generalization generalized so that the input data group satisfies the general condition by using an input data group which is a set of data satisfying any one of the plurality of types of conditions and the trained generalization model. Generate a group of input data.
- the learning unit inputs a general learning data group, which is a set of data satisfying the general conditions among a plurality of types of conditions, as a predetermined machine.
- a learning state estimation model for estimating the state of an object is learned, a learned state estimation model is output, and an input unit is a set of data satisfying any of the plurality of types of conditions.
- the generalized input data group generalized so that the input data group satisfies the general condition.
- the trained state estimation model are used to estimate the state of the object.
- the generalized data generation program inputs a general learning data group which is a set of data satisfying the general conditions among a plurality of types of conditions.
- a generalized model for learning for obtaining data satisfying the general conditions is learned by a predetermined machine learning, a trained generalized model is output, and any of the plurality of types of conditions is satisfied.
- the computer is informed that the input data group generates a generalized input data group generalized so as to satisfy the general condition. Let it run.
- the estimation program according to the sixth aspect of the present disclosure is targeted by a predetermined machine learning by inputting a general learning data group which is a set of data satisfying general conditions among a plurality of types of conditions.
- An input data group that trains a learning state estimation model for estimating the state of an object, outputs a trained state estimation model, and is a set of data that satisfies any of the plurality of types of conditions, and the general learning.
- the generalized input data group generalized so that the input data group satisfies the general condition, and the trained state estimation model.
- the computer is made to estimate the state of the object.
- learning data generated from road surface data indicating the state of the road surface on which the moving body moves which is detected by sensors mounted on moving bodies such as automobiles, pedestrians, and wheelchairs moving on the road surface.
- a case where machine learning is performed using the method will be described.
- the object is not limited to the road surface, and may be another object having a general state and a special state.
- an acceleration sensor, a gyro sensor, a gravity sensor, or the like is used as the sensor mounted on the moving body.
- the road surface data is a detection value of the sensor during the period in which the moving body moves on the road surface, and is represented as time series data.
- FIG. 1 is a block diagram showing an example of the hardware configuration of the generalized data generation device 10 according to the present embodiment.
- the generalized data generation device 10 includes a CPU (Central Processing Unit) 11, a ROM (Read Only Memory) 12, a RAM (Random Access Memory) 13, a storage 14, an input unit 15, and a display unit 16. And a communication interface (I / F) 17 is provided. Each configuration is communicably connected to each other via a bus 18.
- the CPU 11 is a central arithmetic processing unit that executes various programs and controls each part. That is, the CPU 11 reads the program from the ROM 12 or the storage 14, and executes the program using the RAM 13 as a work area. The CPU 11 controls each of the above configurations and performs various arithmetic processes according to the program stored in the ROM 12 or the storage 14. In the present embodiment, the generalized data generation program is stored in the ROM 12 or the storage 14.
- the ROM 12 stores various programs and various data.
- the RAM 13 temporarily stores a program or data as a work area.
- the storage 14 is composed of an HDD (Hard Disk Drive) or an SSD (Solid State Drive), and stores various programs including an operating system and various data.
- the input unit 15 is used to perform various inputs to the own device.
- the display unit 16 is, for example, a liquid crystal display and displays various types of information.
- the display unit 16 may adopt a touch panel method and function as an input unit 15.
- the communication interface 17 is an interface for the own device to communicate with other external devices, and for example, standards such as Ethernet (registered trademark), FDDI (Fiber Distributed Data Interface), and Wi-Fi (registered trademark) are used. ..
- FIG. 2 is a block diagram showing an example of the functional configuration of the generalized data generation device 10 according to the present embodiment.
- the generalized data generation device 10 includes a learning unit 101 and a generalized data generation unit 102 as functional configurations. Each functional configuration is realized by the CPU 11 reading the generalized data generation program stored in the ROM 12 or the storage 14, deploying it in the RAM 13, and executing it.
- the learning unit 101 receives the general learning data group 142, which is a set of data satisfying the general conditions among a plurality of types of conditions, as an input, and obtains the data satisfying the general conditions by predetermined machine learning.
- the generalized model 141 for learning is trained and the trained generalized model 143 is output.
- the generalized data generation unit 102 uses the input data group 144 and the trained generalized model 143, which are a set of data satisfying any one of a plurality of types of conditions, so that the input data group 144 satisfies the general conditions. Generate a generalized input data group 145.
- the above-mentioned plurality of types of conditions are, for example, conditions such as a smooth road surface and a rough road surface.
- the data satisfying the general conditions constituting the general learning data group 142 is, for example, road surface data showing a smooth road surface.
- the road surface data is not labeled with the collection conditions.
- the collection condition referred to here is, for example, a condition indicating a smooth road surface, a rough road surface, or the like.
- the road surface data is given a correct label indicating the state of the road surface for each predetermined section.
- the state of the road surface as used herein means any of a state in which the road surface is flat, a state including a step, and a state including a slope. This correct label is given manually, for example.
- the learning generalized model 141 is a model for obtaining road surface data showing a smooth road surface, and machine learning is performed using the general learning data group 142 to generate a trained generalized model 143.
- the trained generalized model 143 is a model obtained by machine learning without processing the road surface data indicating a smooth road surface as it is.
- the trained generalized model 143 is a machine-learned model as an autoencoder that compresses and restores road surface data indicating a smooth road surface.
- JMVAE Joint Multimodal Variation Autoencoder
- JMVAE Joint Multimodal Variation Autoencoder
- the input data group 144 includes road surface data under various conditions such as road surface data indicating a rough road surface, road surface data indicating a smooth road surface, and road surface data under other conditions.
- road surface data indicating a rough road surface
- road surface data indicating a smooth road surface indicating a smooth road surface
- road surface data under other conditions e.g., road surface data under other conditions.
- the determination of the rough road surface and the smooth road surface is performed based on, for example, the detection value of the sensor.
- the detection value of the sensor when the moving body travels on a rough road surface fluctuates greatly as compared with the detection value of the sensor when the moving body travels on a smooth road surface. That is, the fluctuation of the road surface data is small during the period when the moving body travels on the smooth road surface, and the fluctuation of the road surface data is large during the period when the moving body travels on the rough road surface.
- the fluctuation of the road surface data is equal to or more than a predetermined value, it is determined as the road surface data indicating a rough road surface, and if the fluctuation of the road surface data is less than a predetermined value, it is determined to be the road surface data indicating a smooth road surface.
- the generalized data generation unit 102 When the generalized data generation unit 102 acquires, for example, road surface data indicating a rough road surface from the input data group 144, the generalized data generation unit 102 displays the acquired road surface data indicating the rough road surface using the trained generalized model 143 to indicate a smooth road surface. Convert to road surface data. A set of road surface data showing a smooth road surface after this conversion is generated as a generalized input data group 145. That is, when the generalized data generation unit 102 acquires road surface data other than the road surface data indicating a smooth road surface, the acquired road surface data is converted into road surface data indicating a smooth road surface constituting the trained generalized model 143. Convert to get closer.
- FIG. 3 is a flowchart showing an example of the processing flow by the generalized data generation program according to the present embodiment.
- the processing by the generalized data generation program is realized by the CPU 11 of the generalized data generation device 10 writing the generalized data generation program stored in the ROM 12 or the storage 14 to the RAM 13 and executing the process.
- step S101 of FIG. 3 the CPU 11 receives the input of the general learning data group 142, which is a set of road surface data indicating a smooth road surface, as the learning unit 101.
- step S102 the CPU 11 machine-learns the learning generalized model 141 for obtaining the road surface data indicating a smooth road surface by using the general learning data group 142 that received the input in step S101 as the learning unit 101.
- the trained generalized model 143 is output.
- the trained generalized model 143 is a machine-learned model as an autoencoder that compresses and restores road surface data indicating a smooth road surface.
- step S103 the CPU 11 acquires the input data group 144, which is a data group of various conditions, as the generalized data generation unit 102.
- step S104 the CPU 11 uses the input data group 144 and the trained generalized model 143 as the generalized data generation unit 102, and each road surface data of the input data group 144 is generalized to road surface data showing a smooth road surface.
- the generalized input data group 145 is generated.
- step S105 the CPU 11 stores the generalized input data group 145 generated in step S104 in the storage 14 as the generalized data generation unit 102, and ends a series of processes by the generalized data generation program.
- estimation device is separate from the generalized data generation device described above, it may be integrally configured with the generalized data generation device.
- FIG. 4 is a block diagram showing an example of the hardware configuration of the estimation device 20 according to the present embodiment.
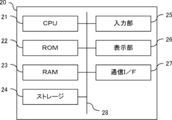
- the estimation device 20 includes a CPU 21, a ROM 22, a RAM 23, a storage 24, an input unit 25, a display unit 26, and a communication interface (I / F) 27. Each configuration is communicably connected to each other via a bus 28.
- the CPU 21 is a central arithmetic processing unit that executes various programs and controls each part. That is, the CPU 21 reads the program from the ROM 22 or the storage 24, and executes the program using the RAM 23 as a work area. The CPU 21 controls each of the above configurations and performs various arithmetic processes according to the program stored in the ROM 22 or the storage 24. In the present embodiment, the estimation program is stored in the ROM 22 or the storage 24.
- the ROM 22 stores various programs and various data.
- the RAM 23 temporarily stores a program or data as a work area.
- the storage 24 is composed of an HDD or an SSD, and stores various programs including an operating system and various data.
- the input unit 25 is used to perform various inputs to the own device.
- the display unit 26 is, for example, a liquid crystal display and displays various types of information.
- the display unit 26 may adopt a touch panel method and function as an input unit 25.
- the communication interface 27 is an interface for the own device to communicate with other external devices, and for example, standards such as Ethernet (registered trademark), FDDI, and Wi-Fi (registered trademark) are used.
- FIG. 5 is a block diagram showing an example of the functional configuration of the estimation device 20 according to the present embodiment.
- the estimation device 20 includes a learning unit 201 and an estimation unit 202 as functional configurations.
- Each functional configuration is realized by the CPU 21 reading the estimation program stored in the ROM 22 or the storage 24, expanding the estimation program in the RAM 23, and executing the program.
- the learning unit 201 is for estimating the state of an object by a predetermined machine learning by inputting a general learning data group 142 which is a set of data satisfying a general condition among a plurality of types of conditions.
- the learning state estimation model 146 is trained and the learned state estimation model 147 is output.
- the general learning data group 142 is the same as that used in the generalized data generation device 10 described above.
- the estimation unit 202 estimated and obtained the state of the object by using the generalized input data group 145 generated by the generalized data generation device 10 described above and the trained state estimation model 147.
- the state estimation result 148 is output.
- the generalized input data group 145 has been trained obtained by machine learning the input data group 144 (FIG. 2), which is a set of data satisfying any one of a plurality of types of conditions, and the general learning data group 142.
- the input data group 144 is a set of data generalized so as to satisfy the general conditions.
- the object is, for example, a road surface.
- the data satisfying the general conditions constituting the general learning data group 142 is, for example, road surface data indicating a smooth road surface, and the road surface data indicates the state of the road surface for each predetermined section.
- the correct answer label is given.
- the state of the road surface as used herein means any of a state in which the road surface is flat, a state including a step, and a state including a slope.
- various models such as a model using a convolutional neural network and an SVM are used as an example of the machine learning model.
- the learning state estimation model 146 is a model for estimating the state of the road surface, and machine learning is performed using the general learning data group 142 to generate the learned state estimation model 147. That is, the trained state estimation model 147 is a machine-learned model using a set of road surface data showing a smooth road surface constituting the general learning data group 142.
- the generalized input data group 145 described above converts the road surface data of various conditions (for example, smooth road surface, rough road surface, and other road surfaces) included in the input data group 144 into road surface data showing a smooth road surface. It is a set of data obtained by. That is, the road surface data input to the estimation device 20 is road surface data indicating a smooth road surface obtained by converting the road surface data under various conditions. Therefore, even if only the trained state estimation model 147 machine-learned using the road surface data showing a smooth road surface is used, the state of the road surface is changed with respect to the input data group 144 which is a set of road surface data under various conditions. Estimation is possible.
- various conditions for example, smooth road surface, rough road surface, and other road surfaces
- the estimation unit 202 uses the generalized input data group 145 and the learned state estimation model 147 to determine whether the road surface is in a flat state, a state including a step, or a state including an inclination. presume.
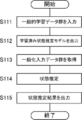
- FIG. 6 is a flowchart showing an example of the processing flow by the estimation program according to the present embodiment.
- the processing by the estimation program is realized by the CPU 21 of the estimation device 20 writing the estimation program stored in the ROM 22 or the storage 24 into the RAM 23 and executing it.
- step S111 of FIG. 6 the CPU 21 receives the input of the general learning data group 142, which is a set of road surface data indicating a smooth road surface, as the learning unit 201.
- step S112 the CPU 21 machine-learns the learning state estimation model 146 for estimating the road surface state by using the general learning data group 142 that received the input in step S111 as the learning unit 201.
- the trained state estimation model 147 is output.
- step S113 the CPU 21 acquires the generalized input data group 145 generated by the generalized data generation device 10 described above as the estimation unit 202.
- step S114 the CPU 21 uses the generalized input data group 145 acquired in step S113 and the learned state estimation model 147 obtained by machine learning in step S112 as the estimation unit 202, as an example, of the road surface. It is estimated whether the state is a flat state, a state including a step, or a state including an inclination.
- step S115 the CPU 21 outputs the state estimation result 148 estimated and obtained in step S114 to, for example, the storage 24 or the display unit 26 as the estimation unit 202, and ends a series of processes by this estimation program.
- FIG. 7 is a diagram provided for explaining the estimation process using the trained generalized model 143 and the trained state estimation model 147 according to the present embodiment.
- the generalized data generation device 10 smoothes road surface data under various conditions (in the example of FIG. 7, rough road surface data and data under other conditions) using the trained generalized model 143. It is converted into road surface data indicating the road surface (generalized data in the example of FIG. 7). Then, the estimation device 20 according to the present embodiment provides a trained state estimation model 147 learned from general data, that is, road surface data indicating a smooth road surface, with respect to the road surface data indicating the smooth road surface after conversion. It is used to estimate the condition of the road surface.
- various processors other than the CPU may execute the generalized data generation process or the estimation process executed by the CPU reading the software (program) in the above embodiment.
- the processors include PLD (Programmable Logic Device) whose circuit configuration can be changed after manufacturing FPGA (Field-Programmable Gate Array), and ASIC (Application Specific Integrated Circuit) for executing ASIC (Application Special Integrated Circuit).
- An example is a dedicated electric circuit or the like, which is a processor having a circuit configuration designed exclusively for the purpose.
- generalized data generation processing or estimation processing may be executed by one of these various processors, or a combination of two or more processors of the same type or different types (for example, a plurality of FPGAs and a CPU). And FPGA in combination, etc.).
- the hardware structure of these various processors is, more specifically, an electric circuit in which circuit elements such as semiconductor elements are combined.
- the program is a non-temporary storage medium such as a CD-ROM (Compact Disk Read Only Memory), a DVD-ROM (Digital entirely Disk Online Memory), and a USB (Universal Serial Bus) memory. It may be provided in the form. Further, the program may be downloaded from an external device via a network.
- Appendix 1 With memory With at least one processor connected to the memory Including The processor A general learning data group for obtaining data satisfying the general conditions by a predetermined machine learning with a general learning data group which is a set of data satisfying the general conditions among a plurality of types of conditions as an input.
- Learn the transformation model and output the trained generalized model A generalized input generalized so that the input data group satisfies the general condition by using an input data group which is a set of data satisfying any one of the plurality of types of conditions and the trained generalized model.
- Generate a set of data A generalized data generator configured to.
- the state of the object is estimated by using the generalized input data group generalized so as to satisfy the above conditions and the trained state estimation model.
- An estimator configured to.
- a non-temporary storage medium that stores a program that can be executed by a computer to perform generalized data generation processing.
- the generalized data generation process A general learning data group for obtaining data satisfying the general conditions by a predetermined machine learning with a general learning data group which is a set of data satisfying the general conditions among a plurality of types of conditions as an input.
- Learn the transformation model and output the trained generalized model Using the input data group which is a set of data satisfying any one of the plurality of types of conditions and the trained generalized model, the generalized input generalized so that the input data group satisfies the general condition.
- a non-temporary storage medium that stores a program that can be executed by a computer to perform estimation processing.
- the estimation process is A learning state estimation model for estimating the state of an object by predetermined machine learning by inputting a general learning data group which is a set of data satisfying general conditions among a plurality of types of conditions. Trained and output the trained state estimation model, Using an input data group which is a set of data satisfying any one of the plurality of types of conditions and a trained generalized model obtained by machine learning the general training data group, the input data group is the general.
- the state of the object is estimated by using the generalized input data group generalized so as to satisfy the above conditions and the trained state estimation model.
- Non-temporary storage medium Non-temporary storage medium.
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Physics & Mathematics (AREA)
- Software Systems (AREA)
- Mathematical Physics (AREA)
- Computing Systems (AREA)
- Artificial Intelligence (AREA)
- General Physics & Mathematics (AREA)
- Data Mining & Analysis (AREA)
- Evolutionary Computation (AREA)
- General Engineering & Computer Science (AREA)
- Biophysics (AREA)
- Molecular Biology (AREA)
- General Health & Medical Sciences (AREA)
- Computational Linguistics (AREA)
- Biomedical Technology (AREA)
- Life Sciences & Earth Sciences (AREA)
- Health & Medical Sciences (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Medical Informatics (AREA)
- Automation & Control Theory (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Traffic Control Systems (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
Abstract
学習データの量を抑制しつつ、対象物の状態の推定を精度良く行うことができる一般化データ生成装置、推定装置、一般化データ生成方法、推定方法、一般化データ生成プログラム、及び推定プログラムを提供する。 一般化データ生成装置10は、複数種類の条件のうち、一般的な条件を満たすデータの集合である一般的学習データ群142を入力として、予め定められた機械学習により、一般的な条件を満たすデータを求めるための学習用一般化モデル141を学習して学習済み一般化モデル143を出力する学習部101と、複数種類の条件のいずれかを満たすデータの集合である入力データ群144及び学習済み一般化モデル143を用いて、入力データ群144が一般的な条件を満たすように一般化された一般化入力データ群145を生成する一般化データ生成部102と、を備える。
Description
開示の技術は、一般化データ生成装置、推定装置、一般化データ生成方法、推定方法、一般化データ生成プログラム、及び推定プログラムに関する。
歩道あるいは車道等の路面上を移動する自動車、歩行者、車椅子等の移動体に搭載されたセンサを用いて、移動体が移動する路面の状況(段差、勾配等)を推定する技術が検討されている(例えば、非特許文献1、2を参照)。
「健常歩行者センサデータを用いたバリア検出の基礎検討」、宮田章裕、荒木伊織、王統順、鈴木天詩、IPSJ論文誌(2018)、インターネット<URL:https://mytlab.org/wp/wp-content/uploads/2018/05/2017_araki.pdf>
「高速バスに載せたスマホの加速度センサーで路面の凹凸を検知、検証試験を実施」、[Online]、インターネット<URL:https://sgforum.impress.co.jp/news/3595>
上述の路面の状況の推定は、学習データを用いた機械学習により構築された学習済みモデルを用いて行われることが多い。しかしながら、路面の状況が統一されていない場合、路面の状況を推定したいデータにおける路面と同じ路面の学習データが必要なため、学習データの量が膨大になるという問題がある。つまり、推定したいデータが例えば滑らかな路面であれば、この滑らかな路面の学習データが必要とされ、推定したいデータが例えば粗い路面であれば、この粗い路面の学習データが必要とされる。学習済みモデルには、様々な条件のデータが入力されるため、高精度な推定を行うためには、これらの滑らかな路面及び粗い路面の各々の学習データが必要とされ、学習データの量が増大する。
開示の技術は、上記の点に鑑みてなされたものであり、学習データの量を抑制しつつ、対象物の状態の推定を精度良く行うことができる一般化データ生成装置、推定装置、一般化データ生成方法、推定方法、一般化データ生成プログラム、及び推定プログラムを提供することを目的とする。
上記目的を達成するために、本開示の第1態様に係る一般化データ生成装置は、複数種類の条件のうち、一般的な条件を満たすデータの集合である一般的学習データ群を入力として、予め定められた機械学習により、前記一般的な条件を満たすデータを求めるための学習用一般化モデルを学習して学習済み一般化モデルを出力する学習部と、前記複数種類の条件のいずれかを満たすデータの集合である入力データ群及び前記学習済み一般化モデルを用いて、前記入力データ群が前記一般的な条件を満たすように一般化された一般化入力データ群を生成する一般化データ生成部と、を備えている。
また、本開示の第2態様に係る推定装置は、複数種類の条件のうち、一般的な条件を満たすデータの集合である一般的学習データ群を入力として、予め定められた機械学習により、対象物の状態を推定するための学習用状態推定モデルを学習して学習済み状態推定モデルを出力する学習部と、前記複数種類の条件のいずれかを満たすデータの集合である入力データ群、及び前記一般的学習データ群を機械学習して得られた学習済み一般化モデルを用いて、前記入力データ群が前記一般的な条件を満たすように一般化された一般化入力データ群と、前記学習済み状態推定モデルとを用いて、前記対象物の状態を推定する推定部と、を備えている。
更に、上記目的を達成するために、本開示の第3態様に係る一般化データ生成方法は、学習部が、複数種類の条件のうち、一般的な条件を満たすデータの集合である一般的学習データ群を入力として、予め定められた機械学習により、前記一般的な条件を満たすデータを求めるための学習用一般化モデルを学習して学習済み一般化モデルを出力し、一般化データ生成部が、前記複数種類の条件のいずれかを満たすデータの集合である入力データ群及び前記学習済み一般化モデルを用いて、前記入力データ群が前記一般的な条件を満たすように一般化された一般化入力データ群を生成する。
また、本開示の第4態様に係る推定方法は、学習部が、複数種類の条件のうち、一般的な条件を満たすデータの集合である一般的学習データ群を入力として、予め定められた機械学習により、対象物の状態を推定するための学習用状態推定モデルを学習して学習済み状態推定モデルを出力し、推定部が、前記複数種類の条件のいずれかを満たすデータの集合である入力データ群、及び前記一般的学習データ群を機械学習して得られた学習済み一般化モデルを用いて、前記入力データ群が前記一般的な条件を満たすように一般化された一般化入力データ群と、前記学習済み状態推定モデルとを用いて、前記対象物の状態を推定する。
更に、上記目的を達成するために、本開示の第5態様に係る一般化データ生成プログラムは、複数種類の条件のうち、一般的な条件を満たすデータの集合である一般的学習データ群を入力として、予め定められた機械学習により、前記一般的な条件を満たすデータを求めるための学習用一般化モデルを学習して学習済み一般化モデルを出力し、前記複数種類の条件のいずれかを満たすデータの集合である入力データ群及び前記学習済み一般化モデルを用いて、前記入力データ群が前記一般的な条件を満たすように一般化された一般化入力データ群を生成することを、コンピュータに実行させる。
また、本開示の第6態様に係る推定プログラムは、複数種類の条件のうち、一般的な条件を満たすデータの集合である一般的学習データ群を入力として、予め定められた機械学習により、対象物の状態を推定するための学習用状態推定モデルを学習して学習済み状態推定モデルを出力し、前記複数種類の条件のいずれかを満たすデータの集合である入力データ群、及び前記一般的学習データ群を機械学習して得られた学習済み一般化モデルを用いて、前記入力データ群が前記一般的な条件を満たすように一般化された一般化入力データ群と、前記学習済み状態推定モデルとを用いて、前記対象物の状態を推定することを、コンピュータに実行させる。
開示の技術によれば、学習データの量を抑制しつつ、対象物の状態の推定を精度良く行うことができる。
以下、開示の技術の実施形態の一例を、図面を参照しつつ説明する。なお、各図面において、同一又は等価な構成要素及び部分には同一の参照符号を付与している。また、図面の寸法比率は、説明の都合上誇張されており、実際の比率とは異なる場合がある。
本実施形態においては、路面上を移動する自動車、歩行者、車椅子等の移動体に搭載されたセンサにより検出された、移動体が移動する路面の状態を示す路面データから生成される学習データを用いて機械学習を行う場合について説明する。但し、対象物は、路面に限らず、一般的な状態と特殊な状態とを有する他の物体であってもよい。なお、移動体に搭載されるセンサには、一例として、加速度センサ、ジャイロセンサ、及び重力センサ等が用いられる。また、路面データは、移動体が路面上を移動する期間におけるセンサの検出値であり、時系列データとして表される。
図1は、本実施形態に係る一般化データ生成装置10のハードウェア構成の一例を示すブロック図である。
図1に示すように、一般化データ生成装置10は、CPU(Central Processing Unit)11、ROM(Read Only Memory)12、RAM(Random Access Memory)13、ストレージ14、入力部15、表示部16、及び通信インタフェース(I/F)17を備えている。各構成は、バス18を介して相互に通信可能に接続されている。
CPU11は、中央演算処理ユニットであり、各種プログラムを実行したり、各部を制御したりする。すなわち、CPU11は、ROM12又はストレージ14からプログラムを読み出し、RAM13を作業領域としてプログラムを実行する。CPU11は、ROM12又はストレージ14に記憶されているプログラムに従って、上記各構成の制御及び各種の演算処理を行う。本実施形態では、ROM12又はストレージ14には、一般化データ生成プログラムが格納されている。
ROM12は、各種プログラム及び各種データを格納する。RAM13は、作業領域として一時的にプログラム又はデータを記憶する。ストレージ14は、HDD(Hard Disk Drive)又はSSD(Solid State Drive)により構成され、オペレーティングシステムを含む各種プログラム、及び各種データを格納する。
入力部15は、自装置に対して各種の入力を行うために使用される。
表示部16は、例えば、液晶ディスプレイであり、各種の情報を表示する。表示部16は、タッチパネル方式を採用して、入力部15として機能しても良い。
通信インタフェース17は、自装置が他の外部機器と通信するためのインタフェースであり、例えば、イーサネット(登録商標)、FDDI(Fiber Distributed Data Interface)、Wi-Fi(登録商標)等の規格が用いられる。
次に、図2を参照して、一般化データ生成装置10の機能構成について説明する。
図2は、本実施形態に係る一般化データ生成装置10の機能構成の一例を示すブロック図である。
図2に示すように、一般化データ生成装置10は、機能構成として、学習部101及び一般化データ生成部102を備えている。各機能構成は、CPU11がROM12又はストレージ14に記憶された一般化データ生成プログラムを読み出し、RAM13に展開して実行することにより実現される。
学習部101は、複数種類の条件のうち、一般的な条件を満たすデータの集合である一般的学習データ群142を入力として、予め定められた機械学習により、一般的な条件を満たすデータを求めるための学習用一般化モデル141を学習して学習済み一般化モデル143を出力する。
一般化データ生成部102は、複数種類の条件のいずれかを満たすデータの集合である入力データ群144及び学習済み一般化モデル143を用いて、入力データ群144が一般的な条件を満たすように一般化された一般化入力データ群145を生成する。
具体的に、上記の複数種類の条件とは、一例として、滑らかな路面、粗い路面等の条件である。一般的学習データ群142を構成する一般的な条件を満たすデータとは、一例として、滑らかな路面を示す路面データである。この場合、路面データには、収集条件のラベルは付与されていない。ここでいう収集条件とは、例えば、滑らかな路面、粗い路面等を示す条件である。この路面データには、予め定められた区間毎に、路面の状態を示す正解ラベルが付与されている。ここでいう路面の状態とは、路面が平坦な状態、段差を含む状態、及び傾斜を含む状態のいずれかの状態を意味する。この正解ラベルは、一例として、人手により付与される。また、学習用一般化モデル141には、機械学習モデルの一例として、畳み込みニューラルネットワークを用いたモデル、SVM(Support Vector Machine)等の種々のモデルが用いられる。この場合、学習用一般化モデル141は、滑らかな路面を示す路面データを求めるためのモデルであり、一般的学習データ群142を用いて機械学習され、学習済み一般化モデル143が生成される。つまり、学習済み一般化モデル143は、滑らかな路面を示す路面データをそのまま加工せずに機械学習して得られたモデルである。学習済み一般化モデル143は、滑らかな路面を示す路面データを圧縮して復元するオートエンコーダとして機械学習されたモデルである。学習済み一般化モデル143の生成には、オートエンコーダの一例として、JMVAE(Joint Multimodal Variation Autoencoder)を利用してもよい。
また、入力データ群144には、粗い路面を示す路面データ、滑らかな路面を示す路面データ、その他の条件の路面データ等、様々な条件の路面データが含まれる。なお、粗い路面及び滑らかな路面の判定は、例えば、センサの検出値に基づいて行われる。一般的に、移動体が粗い路面を走行する場合のセンサの検出値は、移動体が滑らかな路面を走行する場合のセンサの検出値と比べて、大きく変動する。すなわち、移動体が滑らかな路面を走行する期間では、路面データの変動は小さく、移動体が粗い路面を走行する期間では、路面データの変動は大きくなる。このため、路面データの変動が所定値以上であれば、粗い路面を示す路面データと判定し、路面データの変動が所定値未満であれば、滑らかな路面を示す路面データと判定する。
一般化データ生成部102は、入力データ群144から例えば粗い路面を示す路面データを取得した場合、取得した粗い路面を示す路面データを、学習済み一般化モデル143を用いて、滑らかな路面を示す路面データに変換する。この変換後の滑らかな路面を示す路面データの集合が一般化入力データ群145として生成される。つまり、一般化データ生成部102は、滑らかな路面を示す路面データ以外の路面データを取得した場合、取得した路面データを、学習済み一般化モデル143を構成する、滑らかな路面を示す路面データに近づくように変換する。
次に、図3を参照して、本実施形態に係る一般化データ生成装置10の作用について説明する。
図3は、本実施形態に係る一般化データ生成プログラムによる処理の流れの一例を示すフローチャートである。一般化データ生成プログラムによる処理は、一般化データ生成装置10のCPU11が、ROM12又はストレージ14に記憶されている一般化データ生成プログラムをRAM13に書き込んで実行することにより、実現される。
図3のステップS101では、CPU11が、学習部101として、滑らかな路面を示す路面データの集合である一般的学習データ群142の入力を受け付ける。
ステップS102では、CPU11が、学習部101として、ステップS101で入力を受け付けた一般的学習データ群142を用いて、滑らかな路面を示す路面データを求めるための学習用一般化モデル141を機械学習することにより、学習済み一般化モデル143を出力する。学習済み一般化モデル143は、上述したように、滑らかな路面を示す路面データを圧縮して復元するオートエンコーダとして機械学習されたモデルである。
ステップS103では、CPU11が、一般化データ生成部102として、各種条件のデータ群である入力データ群144を取得する。
ステップS104では、CPU11が、一般化データ生成部102として、入力データ群144及び学習済み一般化モデル143を用いて、入力データ群144の各路面データが滑らかな路面を示す路面データに一般化された一般化入力データ群145を生成する。
ステップS105では、CPU11が、一般化データ生成部102として、ステップS104で生成した一般化入力データ群145をストレージ14に記憶し、本一般化データ生成プログラムによる一連の処理を終了する。
次に、推定装置の実施形態について説明する。本実施形態に係る推定装置は、上述の一般化データ生成装置と別体としているが、一般化データ生成装置と一体で構成してもよい。
図4は、本実施形態に係る推定装置20のハードウェア構成の一例を示すブロック図である。
図4に示すように、推定装置20は、CPU21、ROM22、RAM23、ストレージ24、入力部25、表示部26、及び通信インタフェース(I/F)27を備えている。各構成は、バス28を介して相互に通信可能に接続されている。
CPU21は、中央演算処理ユニットであり、各種プログラムを実行したり、各部を制御したりする。すなわち、CPU21は、ROM22又はストレージ24からプログラムを読み出し、RAM23を作業領域としてプログラムを実行する。CPU21は、ROM22又はストレージ24に記憶されているプログラムに従って、上記各構成の制御及び各種の演算処理を行う。本実施形態では、ROM22又はストレージ24には、推定プログラムが格納されている。
ROM22は、各種プログラム及び各種データを格納する。RAM23は、作業領域として一時的にプログラム又はデータを記憶する。ストレージ24は、HDD又はSSDにより構成され、オペレーティングシステムを含む各種プログラム、及び各種データを格納する。
入力部25は、自装置に対して各種の入力を行うために使用される。
表示部26は、例えば、液晶ディスプレイであり、各種の情報を表示する。表示部26は、タッチパネル方式を採用して、入力部25として機能しても良い。
通信インタフェース27は、自装置が他の外部機器と通信するためのインタフェースであり、例えば、イーサネット(登録商標)、FDDI、Wi-Fi(登録商標)等の規格が用いられる。
次に、図5を参照して、推定装置20の機能構成について説明する。
図5は、本実施形態に係る推定装置20の機能構成の一例を示すブロック図である。
図5に示すように、推定装置20は、機能構成として、学習部201及び推定部202を備えている。各機能構成は、CPU21がROM22又はストレージ24に記憶された推定プログラムを読み出し、RAM23に展開して実行することにより実現される。
学習部201は、複数種類の条件のうち、一般的な条件を満たすデータの集合である一般的学習データ群142を入力として、予め定められた機械学習により、対象物の状態を推定するための学習用状態推定モデル146を学習して学習済み状態推定モデル147を出力する。なお、一般的学習データ群142は、上述の一般化データ生成装置10で用いたものと同一である。
推定部202は、上述の一般化データ生成装置10により生成された一般化入力データ群145と、学習済み状態推定モデル147とを用いて、対象物の状態を推定し、推定して得られた状態推定結果148を出力する。但し、一般化入力データ群145は、複数種類の条件のいずれかを満たすデータの集合である入力データ群144(図2)、及び一般的学習データ群142を機械学習して得られた学習済み一般化モデル143(図2)を用いて、入力データ群144が一般的な条件を満たすように一般化されたデータの集合である。
上述したように、対象物とは、例えば、路面である。一般的学習データ群142を構成する一般的な条件を満たすデータとは、例えば、滑らかな路面を示す路面データであり、この路面データには、予め定められた区間毎に、路面の状態を示す正解ラベルが付与されている。ここでいう路面の状態とは、路面が平坦な状態、段差を含む状態、及び傾斜を含む状態のいずれかの状態を意味する。また、学習用状態推定モデル146には、機械学習モデルの一例として、畳み込みニューラルネットワークを用いたモデル、SVM等の種々のモデルが用いられる。この場合、学習用状態推定モデル146は、路面の状態を推定するためのモデルであり、一般的学習データ群142を用いて機械学習され、学習済み状態推定モデル147が生成される。つまり、学習済み状態推定モデル147は、一般的学習データ群142を構成する滑らかな路面を示す路面データの集合を用いて機械学習されたモデルである。
一方、上述した一般化入力データ群145は、入力データ群144に含まれる各種条件(例えば、滑らかな路面、粗い路面、その他条件の路面)の路面データを、滑らかな路面を示す路面データに変換して得られたデータの集合である。つまり、推定装置20に入力される路面データは、各種条件の路面データを変換して得られた、滑らかな路面を示す路面データとされる。このため、滑らかな路面を示す路面データを用いて機械学習された学習済み状態推定モデル147のみであっても、各種条件の路面データの集合である入力データ群144に対して、路面の状態の推定が可能とされる。
すなわち、推定部202は、一般化入力データ群145と、学習済み状態推定モデル147とを用いて、路面が平坦な状態、段差を含む状態、及び傾斜を含む状態のいずれの状態であるかを推定する。
次に、図6を参照して、本実施形態に係る推定装置20の作用について説明する。
図6は、本実施形態に係る推定プログラムによる処理の流れの一例を示すフローチャートである。推定プログラムによる処理は、推定装置20のCPU21が、ROM22又はストレージ24に記憶されている推定プログラムをRAM23に書き込んで実行することにより、実現される。
図6のステップS111では、CPU21が、学習部201として、滑らかな路面を示す路面データの集合である一般的学習データ群142の入力を受け付ける。
ステップS112では、CPU21が、学習部201として、ステップS111で入力を受け付けた一般的学習データ群142を用いて、路面の状態を推定するための学習用状態推定モデル146を機械学習することにより、学習済み状態推定モデル147を出力する。
ステップS113では、CPU21が、推定部202として、上述の一般化データ生成装置10により生成された一般化入力データ群145を取得する。
ステップS114では、CPU21が、推定部202として、ステップS113で取得した一般化入力データ群145と、ステップS112で機械学習により得られた学習済み状態推定モデル147とを用いて、一例として、路面の状態が、平坦な状態、段差を含む状態、及び傾斜を含む状態のいずれの状態であるかを推定する。
ステップS115では、CPU21が、推定部202として、ステップS114で推定して得られた状態推定結果148を例えばストレージ24又は表示部26に出力し、本推定プログラムによる一連の処理を終了する。
図7は、本実施形態に係る学習済み一般化モデル143及び学習済み状態推定モデル147を用いた推定処理の説明に供する図である。
本実施形態に係る一般化データ生成装置10は、様々な条件の路面データ(図7の例では、粗い路面のデータ、他条件のデータ)を、学習済み一般化モデル143を用いて、滑らかな路面を示す路面データ(図7の例では、一般化データ)に変換する。そして、本実施形態に係る推定装置20は、変換後の滑らかな路面を示す路面データに対して、一般的なデータ、すなわち、滑らかな路面を示す路面データで学習した学習済み状態推定モデル147を用いて、路面の状態を推定する。
このように本実施形態によれば、様々な条件の入力データに対して、各々の条件に合った状態推定モデルを用意する必要がなく、一般的な入力データで学習した状態推定モデルのみを用意しておけばよい。これにより、学習データの量を抑制しつつ、対象物の状態の推定を精度良く行うことができる。
なお、上記実施形態でCPUがソフトウェア(プログラム)を読み込んで実行した一般化データ生成処理又は推定処理を、CPU以外の各種のプロセッサが実行してもよい。この場合のプロセッサとしては、FPGA(Field-Programmable Gate Array)等の製造後に回路構成を変更可能なPLD(Programmable Logic Device)、及びASIC(Application Specific Integrated Circuit)等の特定の処理を実行させるために専用に設計された回路構成を有するプロセッサである専用電気回路等が例示される。また、一般化データ生成処理又は推定処理を、これらの各種のプロセッサのうちの1つで実行してもよいし、同種又は異種の2つ以上のプロセッサの組み合わせ(例えば、複数のFPGA、及びCPUとFPGAとの組み合わせ等)で実行してもよい。また、これらの各種のプロセッサのハードウェア的な構造は、より具体的には、半導体素子等の回路素子を組み合わせた電気回路である。
また、上記実施形態では、一般化データ生成プログラム又は推定プログラムがストレージに予め記憶(インストール)されている態様を説明したが、これに限定されない。プログラムは、CD-ROM(Compact Disk Read Only Memory)、DVD-ROM(Digital Versatile Disk Read Only Memory)、及びUSB(Universal Serial Bus)メモリ等の非一時的(non-transitory)記憶媒体に記憶された形態で提供されてもよい。また、プログラムは、ネットワークを介して外部装置からダウンロードされる形態としてもよい。
以上の実施形態に関し、更に以下の付記を開示する。
(付記項1)
メモリと、
前記メモリに接続された少なくとも1つのプロセッサと、
を含み、
前記プロセッサは、
複数種類の条件のうち、一般的な条件を満たすデータの集合である一般的学習データ群を入力として、予め定められた機械学習により、前記一般的な条件を満たすデータを求めるための学習用一般化モデルを学習して学習済み一般化モデルを出力し、
前記複数種類の条件のいずれかを満たすデータの集合である入力データ群及び前記学習済み一般化モデルを用いて、前記入力データ群が前記一般的な条件を満たすように一般化された一般化入力データ群を生成する、
ように構成されている一般化データ生成装置。
メモリと、
前記メモリに接続された少なくとも1つのプロセッサと、
を含み、
前記プロセッサは、
複数種類の条件のうち、一般的な条件を満たすデータの集合である一般的学習データ群を入力として、予め定められた機械学習により、前記一般的な条件を満たすデータを求めるための学習用一般化モデルを学習して学習済み一般化モデルを出力し、
前記複数種類の条件のいずれかを満たすデータの集合である入力データ群及び前記学習済み一般化モデルを用いて、前記入力データ群が前記一般的な条件を満たすように一般化された一般化入力データ群を生成する、
ように構成されている一般化データ生成装置。
(付記項2)
メモリと、
前記メモリに接続された少なくとも1つのプロセッサと、
を含み、
前記プロセッサは、
複数種類の条件のうち、一般的な条件を満たすデータの集合である一般的学習データ群を入力として、予め定められた機械学習により、対象物の状態を推定するための学習用状態推定モデルを学習して学習済み状態推定モデルを出力し、
前記複数種類の条件のいずれかを満たすデータの集合である入力データ群、及び前記一般的学習データ群を機械学習して得られた学習済み一般化モデルを用いて、前記入力データ群が前記一般的な条件を満たすように一般化された一般化入力データ群と、前記学習済み状態推定モデルとを用いて、前記対象物の状態を推定する、
ように構成されている推定装置。
メモリと、
前記メモリに接続された少なくとも1つのプロセッサと、
を含み、
前記プロセッサは、
複数種類の条件のうち、一般的な条件を満たすデータの集合である一般的学習データ群を入力として、予め定められた機械学習により、対象物の状態を推定するための学習用状態推定モデルを学習して学習済み状態推定モデルを出力し、
前記複数種類の条件のいずれかを満たすデータの集合である入力データ群、及び前記一般的学習データ群を機械学習して得られた学習済み一般化モデルを用いて、前記入力データ群が前記一般的な条件を満たすように一般化された一般化入力データ群と、前記学習済み状態推定モデルとを用いて、前記対象物の状態を推定する、
ように構成されている推定装置。
(付記項3)
一般化データ生成処理を実行するようにコンピュータによって実行可能なプログラムを記憶した非一時的記憶媒体であって、
前記一般化データ生成処理は、
複数種類の条件のうち、一般的な条件を満たすデータの集合である一般的学習データ群を入力として、予め定められた機械学習により、前記一般的な条件を満たすデータを求めるための学習用一般化モデルを学習して学習済み一般化モデルを出力し、
前記複数種類の条件のいずれかを満たすデータの集合である入力データ群及び前記学習済み一般化モデルを用いて、前記入力データ群が前記一般的な条件を満たすように一般化された一般化入力データ群を生成する、
非一時的記憶媒体。
一般化データ生成処理を実行するようにコンピュータによって実行可能なプログラムを記憶した非一時的記憶媒体であって、
前記一般化データ生成処理は、
複数種類の条件のうち、一般的な条件を満たすデータの集合である一般的学習データ群を入力として、予め定められた機械学習により、前記一般的な条件を満たすデータを求めるための学習用一般化モデルを学習して学習済み一般化モデルを出力し、
前記複数種類の条件のいずれかを満たすデータの集合である入力データ群及び前記学習済み一般化モデルを用いて、前記入力データ群が前記一般的な条件を満たすように一般化された一般化入力データ群を生成する、
非一時的記憶媒体。
(付記項4)
推定処理を実行するようにコンピュータによって実行可能なプログラムを記憶した非一時的記憶媒体であって、
前記推定処理は、
複数種類の条件のうち、一般的な条件を満たすデータの集合である一般的学習データ群を入力として、予め定められた機械学習により、対象物の状態を推定するための学習用状態推定モデルを学習して学習済み状態推定モデルを出力し、
前記複数種類の条件のいずれかを満たすデータの集合である入力データ群、及び前記一般的学習データ群を機械学習して得られた学習済み一般化モデルを用いて、前記入力データ群が前記一般的な条件を満たすように一般化された一般化入力データ群と、前記学習済み状態推定モデルとを用いて、前記対象物の状態を推定する、
非一時的記憶媒体。
推定処理を実行するようにコンピュータによって実行可能なプログラムを記憶した非一時的記憶媒体であって、
前記推定処理は、
複数種類の条件のうち、一般的な条件を満たすデータの集合である一般的学習データ群を入力として、予め定められた機械学習により、対象物の状態を推定するための学習用状態推定モデルを学習して学習済み状態推定モデルを出力し、
前記複数種類の条件のいずれかを満たすデータの集合である入力データ群、及び前記一般的学習データ群を機械学習して得られた学習済み一般化モデルを用いて、前記入力データ群が前記一般的な条件を満たすように一般化された一般化入力データ群と、前記学習済み状態推定モデルとを用いて、前記対象物の状態を推定する、
非一時的記憶媒体。
10 一般化データ生成装置
11、21 CPU
12、22 ROM
13、23 RAM
14、24 ストレージ
15、25 入力部
16、26 表示部
17、27 通信I/F
18、28 バス
20 推定装置
101、201学習部
102 一般化データ生成部
141 学習用一般化モデル
142 一般的学習データ群
143 学習済み一般化モデル
144 入力データ群
145 一般化入力データ群
146 学習用状態推定モデル
147 学習済み状態推定モデル
148 状態推定結果
202 推定部
11、21 CPU
12、22 ROM
13、23 RAM
14、24 ストレージ
15、25 入力部
16、26 表示部
17、27 通信I/F
18、28 バス
20 推定装置
101、201学習部
102 一般化データ生成部
141 学習用一般化モデル
142 一般的学習データ群
143 学習済み一般化モデル
144 入力データ群
145 一般化入力データ群
146 学習用状態推定モデル
147 学習済み状態推定モデル
148 状態推定結果
202 推定部
Claims (8)
- 複数種類の条件のうち、一般的な条件を満たすデータの集合である一般的学習データ群を入力として、予め定められた機械学習により、前記一般的な条件を満たすデータを求めるための学習用一般化モデルを学習して学習済み一般化モデルを出力する学習部と、
前記複数種類の条件のいずれかを満たすデータの集合である入力データ群及び前記学習済み一般化モデルを用いて、前記入力データ群が前記一般的な条件を満たすように一般化された一般化入力データ群を生成する一般化データ生成部と、
を備えた一般化データ生成装置。 - 前記一般的な条件を満たすデータは、滑らかな路面を示す路面データであり、
前記入力データ群は、粗い路面を示す路面データを含む請求項1に記載の一般化データ生成装置。 - 複数種類の条件のうち、一般的な条件を満たすデータの集合である一般的学習データ群を入力として、予め定められた機械学習により、対象物の状態を推定するための学習用状態推定モデルを学習して学習済み状態推定モデルを出力する学習部と、
前記複数種類の条件のいずれかを満たすデータの集合である入力データ群、及び前記一般的学習データ群を機械学習して得られた学習済み一般化モデルを用いて、前記入力データ群が前記一般的な条件を満たすように一般化された一般化入力データ群と、前記学習済み状態推定モデルとを用いて、前記対象物の状態を推定する推定部と、
を備えた推定装置。 - 前記対象物は、路面であり、
前記推定部は、前記路面が平坦な状態、段差を含む状態、及び傾斜を含む状態のいずれの状態であるかを推定する請求項3に記載の推定装置。 - 学習部が、複数種類の条件のうち、一般的な条件を満たすデータの集合である一般的学習データ群を入力として、予め定められた機械学習により、前記一般的な条件を満たすデータを求めるための学習用一般化モデルを学習して学習済み一般化モデルを出力し、
一般化データ生成部が、前記複数種類の条件のいずれかを満たすデータの集合である入力データ群及び前記学習済み一般化モデルを用いて、前記入力データ群が前記一般的な条件を満たすように一般化された一般化入力データ群を生成する、
一般化データ生成方法。 - 学習部が、複数種類の条件のうち、一般的な条件を満たすデータの集合である一般的学習データ群を入力として、予め定められた機械学習により、対象物の状態を推定するための学習用状態推定モデルを学習して学習済み状態推定モデルを出力し、
推定部が、前記複数種類の条件のいずれかを満たすデータの集合である入力データ群、及び前記一般的学習データ群を機械学習して得られた学習済み一般化モデルを用いて、前記入力データ群が前記一般的な条件を満たすように一般化された一般化入力データ群と、前記学習済み状態推定モデルとを用いて、前記対象物の状態を推定する、
推定方法。 - 複数種類の条件のうち、一般的な条件を満たすデータの集合である一般的学習データ群を入力として、予め定められた機械学習により、前記一般的な条件を満たすデータを求めるための学習用一般化モデルを学習して学習済み一般化モデルを出力し、
前記複数種類の条件のいずれかを満たすデータの集合である入力データ群及び前記学習済み一般化モデルを用いて、前記入力データ群が前記一般的な条件を満たすように一般化された一般化入力データ群を生成することを、コンピュータに実行させるための一般化データ生成プログラム。 - 複数種類の条件のうち、一般的な条件を満たすデータの集合である一般的学習データ群を入力として、予め定められた機械学習により、対象物の状態を推定するための学習用状態推定モデルを学習して学習済み状態推定モデルを出力し、
前記複数種類の条件のいずれかを満たすデータの集合である入力データ群、及び前記一般的学習データ群を機械学習して得られた学習済み一般化モデルを用いて、前記入力データ群が前記一般的な条件を満たすように一般化された一般化入力データ群と、前記学習済み状態推定モデルとを用いて、前記対象物の状態を推定することを、コンピュータに実行させるための推定プログラム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US17/619,602 US20220351046A1 (en) | 2019-06-18 | 2019-06-18 | Generalized data generation device, estimation device, generalized data generation method, estimation method generalized data generation program, and estimation program |
| JP2021528504A JP7276449B2 (ja) | 2019-06-18 | 2019-06-18 | 一般化データ生成装置、推定装置、一般化データ生成方法、推定方法、一般化データ生成プログラム、及び推定プログラム |
| PCT/JP2019/024121 WO2020255260A1 (ja) | 2019-06-18 | 2019-06-18 | 一般化データ生成装置、推定装置、一般化データ生成方法、推定方法、一般化データ生成プログラム、及び推定プログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2019/024121 WO2020255260A1 (ja) | 2019-06-18 | 2019-06-18 | 一般化データ生成装置、推定装置、一般化データ生成方法、推定方法、一般化データ生成プログラム、及び推定プログラム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2020255260A1 true WO2020255260A1 (ja) | 2020-12-24 |
Family
ID=74040307
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2019/024121 Ceased WO2020255260A1 (ja) | 2019-06-18 | 2019-06-18 | 一般化データ生成装置、推定装置、一般化データ生成方法、推定方法、一般化データ生成プログラム、及び推定プログラム |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20220351046A1 (ja) |
| JP (1) | JP7276449B2 (ja) |
| WO (1) | WO2020255260A1 (ja) |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016212456A (ja) * | 2015-04-28 | 2016-12-15 | 日本電信電話株式会社 | バリア情報生成システムとそのバリア情報生成装置、バリア情報生成方法およびプログラム |
| JP2019091236A (ja) * | 2017-11-14 | 2019-06-13 | 富士通株式会社 | 特徴抽出装置、特徴抽出プログラム、および特徴抽出方法 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6856897B1 (en) * | 2003-09-22 | 2005-02-15 | Navteq North America, Llc | Method and system for computing road grade data |
| CN109643383B (zh) * | 2016-07-28 | 2023-09-01 | 谷歌有限责任公司 | 域分离神经网络 |
| US10504004B2 (en) * | 2016-09-16 | 2019-12-10 | General Dynamics Mission Systems, Inc. | Systems and methods for deep model translation generation |
| CN110226172B (zh) * | 2016-12-15 | 2024-02-02 | 谷歌有限责任公司 | 将源域图像变换为目标域图像 |
| US20200272897A1 (en) * | 2017-11-22 | 2020-08-27 | Nec Corporation | Learning device, learning method, and recording medium |
| US20210052049A1 (en) * | 2018-08-08 | 2021-02-25 | Lingdong Technology (Beijing) Co. Ltd | Automated guided vehicle navigation and protection system |
| US10748033B2 (en) * | 2018-12-11 | 2020-08-18 | Industrial Technology Research Institute | Object detection method using CNN model and object detection apparatus using the same |
| DE102018222531A1 (de) * | 2018-12-20 | 2020-06-25 | Volkswagen Aktiengesellschaft | Verfahren zum wenigstens teilautomatisierten Steuern des Kraftfahrzeugs während eines Einpark- oder Ausparkvorgangs, Steuervorrichtung sowie Kraftfahrzeug |
| US10902303B2 (en) * | 2019-01-22 | 2021-01-26 | Honda Motor Co., Ltd. | Methods and systems for visual recognition using triplet loss |
| DK180407B1 (en) * | 2019-01-28 | 2021-04-21 | Motional Ad Llc | Detecting road anomalies |
-
2019
- 2019-06-18 JP JP2021528504A patent/JP7276449B2/ja active Active
- 2019-06-18 WO PCT/JP2019/024121 patent/WO2020255260A1/ja not_active Ceased
- 2019-06-18 US US17/619,602 patent/US20220351046A1/en active Pending
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016212456A (ja) * | 2015-04-28 | 2016-12-15 | 日本電信電話株式会社 | バリア情報生成システムとそのバリア情報生成装置、バリア情報生成方法およびプログラム |
| JP2019091236A (ja) * | 2017-11-14 | 2019-06-13 | 富士通株式会社 | 特徴抽出装置、特徴抽出プログラム、および特徴抽出方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2020255260A1 (ja) | 2020-12-24 |
| JP7276449B2 (ja) | 2023-05-18 |
| US20220351046A1 (en) | 2022-11-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3772707B1 (en) | Dynamics model for globally stable modeling of system dynamics | |
| JP7164028B2 (ja) | 学習システム、データ生成装置、データ生成方法、及びデータ生成プログラム | |
| US10769866B2 (en) | Generating estimates of failure risk for a vehicular component | |
| Shafiei Dizaji et al. | Leveraging vision for structural identification: a digital image correlation based approach | |
| WO2020100893A1 (ja) | 学習装置、推定装置、方法、及びプログラム | |
| JP6347190B2 (ja) | 情報処理装置、プログラム及び方法 | |
| JP2015148934A (ja) | 発電量予測装置および発電量予測方法 | |
| Ebel et al. | Data publishing in mechanics and dynamics: challenges, guidelines, and examples from engineering design | |
| JP7276449B2 (ja) | 一般化データ生成装置、推定装置、一般化データ生成方法、推定方法、一般化データ生成プログラム、及び推定プログラム | |
| Yu et al. | Performance evaluation of integrated strategy of vehicle route guidance and traffic signal control using traffic simulation | |
| JP6992534B2 (ja) | データ作成装置、誘導モデル学習装置、誘導推定装置、データ作成方法、誘導モデル学習方法、誘導推定方法及びプログラム | |
| CN115376086A (zh) | 车道线生成方法、装置、计算机设备和存储介质 | |
| WO2017037859A1 (ja) | 情報処理装置及び方法 | |
| JP7268731B2 (ja) | 学習データ生成装置、学習装置、学習データ生成方法、及び学習データ生成プログラム | |
| US10169509B2 (en) | Efficient deployment of table lookup (TLU) in an enterprise-level scalable circuit simulation architecture | |
| Osswald et al. | Prototyping automotive cyber-physical systems | |
| JP7048896B2 (ja) | 学習データ生成装置、学習データ生成方法およびプログラム | |
| JP2020046346A (ja) | 学習装置、推定装置、学習方法、推定方法およびプログラム | |
| JP2022009309A (ja) | パラメータ推定装置、経路別人数推定装置、パラメータ推定方法、経路別人数推定方法及びプログラム | |
| WO2021064899A1 (ja) | 学習装置、予測装置、学習方法、及び学習プログラム | |
| Koensgen et al. | Robust design strategy applied to a vehicle suspension system with high camber angle tyres | |
| JP7157320B2 (ja) | 学習データ生成装置、学習データ生成方法およびプログラム | |
| Weinert et al. | New methods for calculating the force distribution within belt grinding processes | |
| Vidano et al. | Searching for a cheap robust steering controller | |
| Muratore et al. | Towards a Dynamic Edge AI Framework applied to autonomous driving cars |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 19933677 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2021528504 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 19933677 Country of ref document: EP Kind code of ref document: A1 |