WO2022158446A1 - 学習装置の学習方法、設計パターンの設計方法、積層体の製造方法及び設計パターンの設計装置 - Google Patents
学習装置の学習方法、設計パターンの設計方法、積層体の製造方法及び設計パターンの設計装置 Download PDFInfo
- Publication number
- WO2022158446A1 WO2022158446A1 PCT/JP2022/001599 JP2022001599W WO2022158446A1 WO 2022158446 A1 WO2022158446 A1 WO 2022158446A1 JP 2022001599 W JP2022001599 W JP 2022001599W WO 2022158446 A1 WO2022158446 A1 WO 2022158446A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- pattern
- lamination
- learning
- design
- search model
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images






Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/08—Learning methods
- G06N3/098—Distributed learning, e.g. federated learning
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B29—WORKING OF PLASTICS; WORKING OF SUBSTANCES IN A PLASTIC STATE IN GENERAL
- B29C—SHAPING OR JOINING OF PLASTICS; SHAPING OF MATERIAL IN A PLASTIC STATE, NOT OTHERWISE PROVIDED FOR; AFTER-TREATMENT OF THE SHAPED PRODUCTS, e.g. REPAIRING
- B29C70/00—Shaping composites, i.e. plastics material comprising reinforcements, fillers or preformed parts, e.g. inserts
- B29C70/04—Shaping composites, i.e. plastics material comprising reinforcements, fillers or preformed parts, e.g. inserts comprising reinforcements only, e.g. self-reinforcing plastics
- B29C70/28—Shaping operations therefor
- B29C70/30—Shaping by lay-up, i.e. applying fibres, tape or broadsheet on a mould, former or core; Shaping by spray-up, i.e. spraying of fibres on a mould, former or core
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B29—WORKING OF PLASTICS; WORKING OF SUBSTANCES IN A PLASTIC STATE IN GENERAL
- B29C—SHAPING OR JOINING OF PLASTICS; SHAPING OF MATERIAL IN A PLASTIC STATE, NOT OTHERWISE PROVIDED FOR; AFTER-TREATMENT OF THE SHAPED PRODUCTS, e.g. REPAIRING
- B29C70/00—Shaping composites, i.e. plastics material comprising reinforcements, fillers or preformed parts, e.g. inserts
- B29C70/04—Shaping composites, i.e. plastics material comprising reinforcements, fillers or preformed parts, e.g. inserts comprising reinforcements only, e.g. self-reinforcing plastics
- B29C70/28—Shaping operations therefor
- B29C70/30—Shaping by lay-up, i.e. applying fibres, tape or broadsheet on a mould, former or core; Shaping by spray-up, i.e. spraying of fibres on a mould, former or core
- B29C70/38—Automated lay-up, e.g. using robots, laying filaments according to predetermined patterns
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B32—LAYERED PRODUCTS
- B32B—LAYERED PRODUCTS, i.e. PRODUCTS BUILT-UP OF STRATA OF FLAT OR NON-FLAT, e.g. CELLULAR OR HONEYCOMB, FORM
- B32B5/00—Layered products characterised by the non- homogeneity or physical structure, i.e. comprising a fibrous, filamentary, particulate or foam layer; Layered products characterised by having a layer differing constitutionally or physically in different parts
- B32B5/02—Layered products characterised by the non- homogeneity or physical structure, i.e. comprising a fibrous, filamentary, particulate or foam layer; Layered products characterised by having a layer differing constitutionally or physically in different parts characterised by structural features of a fibrous or filamentary layer
- B32B5/12—Layered products characterised by the non- homogeneity or physical structure, i.e. comprising a fibrous, filamentary, particulate or foam layer; Layered products characterised by having a layer differing constitutionally or physically in different parts characterised by structural features of a fibrous or filamentary layer characterised by the relative arrangement of fibres or filaments of different layers, e.g. the fibres or filaments being parallel or perpendicular to each other
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B32—LAYERED PRODUCTS
- B32B—LAYERED PRODUCTS, i.e. PRODUCTS BUILT-UP OF STRATA OF FLAT OR NON-FLAT, e.g. CELLULAR OR HONEYCOMB, FORM
- B32B5/00—Layered products characterised by the non- homogeneity or physical structure, i.e. comprising a fibrous, filamentary, particulate or foam layer; Layered products characterised by having a layer differing constitutionally or physically in different parts
- B32B5/22—Layered products characterised by the non- homogeneity or physical structure, i.e. comprising a fibrous, filamentary, particulate or foam layer; Layered products characterised by having a layer differing constitutionally or physically in different parts characterised by the presence of two or more layers which are next to each other and are fibrous, filamentary, formed of particles or foamed
- B32B5/24—Layered products characterised by the non- homogeneity or physical structure, i.e. comprising a fibrous, filamentary, particulate or foam layer; Layered products characterised by having a layer differing constitutionally or physically in different parts characterised by the presence of two or more layers which are next to each other and are fibrous, filamentary, formed of particles or foamed one layer being a fibrous or filamentary layer
- B32B5/26—Layered products characterised by the non- homogeneity or physical structure, i.e. comprising a fibrous, filamentary, particulate or foam layer; Layered products characterised by having a layer differing constitutionally or physically in different parts characterised by the presence of two or more layers which are next to each other and are fibrous, filamentary, formed of particles or foamed one layer being a fibrous or filamentary layer another layer next to it also being fibrous or filamentary
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F30/00—Computer-aided design [CAD]
- G06F30/10—Geometric CAD
- G06F30/17—Mechanical parametric or variational design
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F30/00—Computer-aided design [CAD]
- G06F30/20—Design optimisation, verification or simulation
- G06F30/27—Design optimisation, verification or simulation using machine learning, e.g. artificial intelligence, neural networks, support vector machines [SVM] or training a model
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N20/00—Machine learning
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N5/00—Computing arrangements using knowledge-based models
- G06N5/01—Dynamic search techniques; Heuristics; Dynamic trees; Branch-and-bound
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B32—LAYERED PRODUCTS
- B32B—LAYERED PRODUCTS, i.e. PRODUCTS BUILT-UP OF STRATA OF FLAT OR NON-FLAT, e.g. CELLULAR OR HONEYCOMB, FORM
- B32B2250/00—Layers arrangement
- B32B2250/20—All layers being fibrous or filamentary
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B32—LAYERED PRODUCTS
- B32B—LAYERED PRODUCTS, i.e. PRODUCTS BUILT-UP OF STRATA OF FLAT OR NON-FLAT, e.g. CELLULAR OR HONEYCOMB, FORM
- B32B2260/00—Layered product comprising an impregnated, embedded, or bonded layer wherein the layer comprises an impregnation, embedding, or binder material
- B32B2260/02—Composition of the impregnated, bonded or embedded layer
- B32B2260/021—Fibrous or filamentary layer
- B32B2260/023—Two or more layers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B32—LAYERED PRODUCTS
- B32B—LAYERED PRODUCTS, i.e. PRODUCTS BUILT-UP OF STRATA OF FLAT OR NON-FLAT, e.g. CELLULAR OR HONEYCOMB, FORM
- B32B2260/00—Layered product comprising an impregnated, embedded, or bonded layer wherein the layer comprises an impregnation, embedding, or binder material
- B32B2260/04—Impregnation, embedding, or binder material
- B32B2260/046—Synthetic resin
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F2111/00—Details relating to CAD techniques
- G06F2111/04—Constraint-based CAD
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F2111/00—Details relating to CAD techniques
- G06F2111/06—Multi-objective optimisation, e.g. Pareto optimisation using simulated annealing [SA], ant colony algorithms or genetic algorithms [GA]
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F2113/00—Details relating to the application field
- G06F2113/26—Composites
Definitions
- the present disclosure relates to a learning method for a learning device, a design pattern design method, a laminate manufacturing method, and a design pattern design device.
- the laminated structure has constraints such as the order of lamination in the lamination direction.
- constraints such as the order of lamination in the lamination direction.
- a constraint condition for example, there is a condition that the difference in the orientation angle between the orientation directions of fibers in two adjacent layers is 45° or less.
- the relational expression is used to calculate the layered structure information, which is the layered structure information in consideration of the above constraints.
- Patent Document 1 when physical property values are used as input values, when trying to calculate layered structure information in consideration of the above constraints, the solution cannot be predicted, and layered structure information may not be obtained. There is in addition, in Patent Document 1, even if the solution converges, it may take a long time to calculate. As the number of layers increases, the calculation time increases. becomes.
- the present disclosure provides a learning method for a learning device, a design pattern design method, a laminate manufacturing method, and a design pattern design device that can easily derive an appropriate lamination pattern in consideration of constraints. is the subject.
- the learning method of the learning device of the present disclosure uses a fiber sheet as a unidirectional material in which the fiber orientation direction is one direction, and searches for a lamination pattern of a laminate formed by laminating the fiber sheets.
- a learning method for a learning device in which a learning device learns a search model, wherein the search model includes constraints related to lamination of the fiber sheets and is a learning model using a policy function and a value function, Acquiring an initial lamination pattern, which is the lamination pattern in an initial state, by the learning device, and learning the search model with the initial lamination pattern as an input so as to obtain the lamination pattern that satisfies the constraint conditions. Execute the step and
- the design pattern design method of the present disclosure uses the search model learned by the learning method of the learning device to create a design pattern, which is the lamination pattern of the laminate that satisfies the constraint, using the design device.
- a method for designing a design pattern comprising: deriving a candidate pattern, which is the lamination pattern that is a candidate for the lamination body, to the design device by a predetermined algorithm; and searching for the candidate pattern for the lamination body. and a step of deriving a design pattern, which is the lamination pattern that satisfies the constraints, by inputting it into the model.
- the method for producing a laminate according to the present disclosure includes the step of laminating the fiber sheets based on the design pattern designed by the above-described design pattern design method, and integrating the laminated fiber sheets to form the laminate. forming;
- the design pattern design device of the present disclosure uses the search model learned by the learning method of the learning device to design a design pattern that is a lamination pattern of the lamination body that satisfies the constraint conditions.
- An apparatus comprising: deriving a candidate pattern that is the lamination pattern that is a candidate for the lamination by a predetermined algorithm; and inputting the candidate pattern for the lamination into the search model to satisfy the constraint conditions. and a step of deriving a design pattern, which is the lamination pattern.
- FIG. 1 is an explanatory diagram of a lamination pattern.
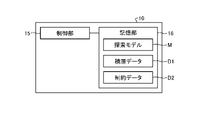
- FIG. 2 is a diagram related to a design pattern designing apparatus according to the present embodiment.
- FIG. 3 is an explanatory diagram of a search model.
- FIG. 4 is a flowchart relating to the learning method of the design device according to this embodiment.
- FIG. 5 is a flowchart for learning the search model.
- FIG. 6 is a flowchart relating to the design pattern design method according to the present embodiment.
- FIG. 7 is a flowchart relating to the method for manufacturing a laminate according to this embodiment.
- FIG. 1 is an explanatory diagram of a lamination pattern.
- FIG. 2 is a diagram related to a design pattern designing apparatus according to the present embodiment.
- FIG. 3 is an explanatory diagram of a search model.
- FIG. 4 is a flowchart relating to the learning method of the design device according to this embodiment.
- FIG. 5 is a flowchart for learning the search model.
- FIG. 6 is a flowchart relating to the design pattern design method according to the present embodiment.
- FIG. 7 is a flowchart relating to the method for manufacturing a laminate according to this embodiment.
- the laminate 1 is formed by arranging and laminating a plurality of fiber sheets S in the lamination direction and integrally molding them.
- the fiber sheet S is, for example, a prepreg in which reinforcing fibers are impregnated with a resin, and is a unidirectional material in which the fibers are oriented in one direction.
- the fiber sheet S is not particularly limited to prepreg, and may be a dry reinforcing fiber sheet that is not impregnated with resin.
- the laminate 1 has a predetermined lamination pattern P in the lamination direction.
- the lamination pattern P is the arrangement order of the orientation angle between the reference direction and the orientation direction of each fiber sheet S in the lamination direction.
- the lamination pattern P of the laminate 1 has orientation angles of (0, 45, 90, 0, 45, 90, -45, 45, 0, 0, 0, 0).
- the lamination pattern P may be subject to constraints due to required characteristics.
- the constraint conditions are the first condition that the difference in the orientation angle between adjacent fiber sheets S in the lamination direction is 45° or less, and the number of continuous fiber sheets S that have the same orientation direction in the lamination direction is 3 layers or less.
- the lamination pattern P of the laminate 1 has orientation angles of 0), which satisfies the above constraints.
- the first constraint condition is that the difference in orientation angle is 45° or less
- the orientation angle is not particularly limited, and any orientation angle may be used.
- the second condition of the constraint condition is the condition that the number of consecutive layers of the fiber sheet S is three or less
- the number of layers is not particularly limited, and any number of layers may be used.
- the constraint conditions may be conditions according to the characteristics required for the laminate 1, and are not particularly limited to the first condition and the second condition.
- the design pattern design device 10 is a device for designing a design pattern, which is the lamination pattern P of the laminate 1 that satisfies the constraint conditions.
- the design device 10 also functions as a learning device for learning a search model M for searching for the lamination pattern P.
- the design device 10 and the learning device are integrated, but are not particularly limited, and may be configured separately.
- the design device 10 includes a control unit 15 and a storage unit 16.
- the storage unit 16 stores programs and data.
- the storage unit 16 may also function as a work area that temporarily stores the processing results of the control unit 15 .
- the memory unit 16 may include any memory device such as a semiconductor memory device and a magnetic memory device.
- the storage unit 16 includes a search model M as a program.
- the search model M is a learning model for searching the lamination pattern P of the laminate 1 .
- the search model M is a learning model including the above constraints, which is a combination of Monte Carlo tree search and deep reinforcement learning.
- the search model M uses a policy function and a value function, and searches for a lamination pattern P that satisfies the constraint conditions by interchanging the orientation angles of adjacent fiber sheets S in the lamination direction. Also, this search model M is a learning model that can be learned without teacher data.
- the storage unit 16 stores lamination data D1 regarding lamination pattern P and constraint data D2 regarding constraint conditions as data.
- the lamination data D1 is information about the lamination pattern P shown in FIG. 1, and includes the lamination data D1 used as input and the lamination data D1 acquired as output.
- the constraint data D2 is information regarding the first condition and the second condition described above.
- the control unit 15 executes programs and exchanges data with the storage unit 16.
- the control unit 15 includes, for example, an integrated circuit such as a CPU (Central Processing Unit). Specifically, the control unit 15 executes learning of the search model M using the lamination data D1 and the constraint data D2 stored in the storage unit 16 . Further, the control unit 15 uses the learned search model M to derive the lamination pattern P of the laminated body 1 that satisfies the constraint conditions.
- the lamination pattern P on the upper side in FIG. 3 corresponds to the lamination pattern P on the upper side in FIG. 1, and is a lamination pattern P that does not satisfy the constraint conditions.
- the lamination pattern P on the lower side of FIG. 3 corresponds to the lamination pattern P on the lower side of FIG. 1 and is a lamination pattern P that satisfies the constraint conditions.
- the search model M that combines Monte Carlo tree search and deep reinforcement learning.
- a learned search model M is used, and specifically, a learned policy function and value function included in the search model M are used. For this reason, the search model M performs a search for changing the orientation angle of the fiber sheet S, and selects the change of the orientation angle of the fiber sheet S, which is a policy with a high reward, from the search results of the search.
- the search model M satisfies the constraint by changing the orientation angle of the fiber sheet S, the lamination pattern P that satisfies the constraint is derived as a solution.
- the lamination pattern P used in the search model M has, for example, 12 layers.
- the lamination number of the lamination pattern P is smaller than the lamination number of the laminated body 1 .
- the number of layers in the layer pattern P may be the same as the number of layers in the layered body 1 .
- the control unit 15 of the design device 10 executes a step of acquiring an initial lamination pattern, which is the lamination pattern P in the initial state (step S11 ).
- the initial lamination pattern is, for example, a lamination pattern that satisfies the constraint conditions.
- the control unit 15 executes step S12 of learning the search model M using the initial lamination pattern. That is, in step S12, since the search model M is a model that can be learned without teacher data, the search model M can be learned using the initial lamination pattern.
- the control unit 15 evaluates whether or not the search model M after learning satisfies the performance (step S13).
- step S13 the lamination pattern P serving as an input for evaluation is input to the learned search model M, and it is evaluated whether or not the output lamination pattern P satisfies the constraint conditions. performance is evaluated. If the control unit 15 determines in step S13 that the performance of the search model M is satisfied (step S13: Yes), the evaluation of the search model M ends. On the other hand, when the control unit 15 determines in step S13 that the performance of the search model M is not satisfied (step S13: No), the process proceeds to step S12, and learning of the search model M is performed again.
- step S12 regarding learning of the search model M will be specifically described with reference to FIG.
- the control unit 15 replaces the layers of some of the fiber sheets S in the initial lamination pattern to obtain an initial lamination that does not satisfy the constraint conditions.
- a plurality of patterns are generated (step S21).
- the layers of the adjacent fiber sheets may be exchanged, or the layers of the fiber sheets may be randomly exchanged, and there is no particular limitation.
- the control unit 15 selects one initial lamination pattern as an input from a plurality of initial lamination patterns that do not satisfy the constraint conditions (step S22).
- the controller 15 sets the input initial lamination pattern to the state of the lamination pattern P (step S23). Subsequently, the control unit 15 determines whether or not a predetermined number of episode steps has been reached (step S24).
- the number of episode steps is the number of repetitions of this episode step, with a series of steps from step S23 as a starting point through step S26 to step S28, which will be described later, to returning to step S23 again. ing.
- the predetermined number of episode steps is a predetermined numerical value.
- step S25 the control unit 15 determines whether or not the lamination pattern P set to the state in step S23 satisfies the constraint conditions (step S25).
- step S25: Yes the process proceeds to step S29, which will be described later.
- step S25: No the search model M is used to perform a search based on the lamination pattern P set to the state in step S23. Execute (step S26).
- step S26 in the lamination pattern P, the layers of the adjacent fiber sheets S are exchanged and searched.
- step S26 the control unit 15 acquires the search result, which is the result of executing the search. After that, the control unit 15 determines whether or not the number of searches has reached a predetermined number (step S27). If the control unit 15 determines that the number of searches has not reached the predetermined number (step S27: No), the process proceeds to step S26 again to re-execute the search. In this way, in step S26, the search is repeatedly executed until the predetermined number of searches is reached.
- step S27 determines in step S27 that the number of searches has reached the predetermined number (step S27: Yes)
- it uses information on a plurality of search results corresponding to the number of searches to replace one stacked layer.
- An action (behavior) for selecting the pattern P is selected and executed (step S28), and the process proceeds to step S23.
- step S23 the controller 15 sets the lamination pattern P selected in step S28 to the state. Note that the control unit 15 counts up the number of episode steps (increases to "+1") by executing the action in step S28.
- step S24 When the control unit 15 determines in step S24 that the predetermined number of episode steps has been reached, or determines in step S25 that the lamination pattern P satisfies the constraint conditions, the process proceeds to step S29.
- the control unit 15 updates the policy function and the value function included in the search model M in step S29.
- step S29 the policy function and the value function are updated based on information obtained by executing all episode steps. Specifically, in step S29, the policy function and the value function are updated so that when the search model M searches for the lamination pattern P, the fewer the number of times the layers of the fiber sheet S are replaced, the higher the reward. Then, the control unit 15 determines whether or not the learning of the search model M is completed (step S30).
- step S30 when the control unit 15 determines that learning has ended (step S30: Yes), the process proceeds to step S13. On the other hand, if the control unit 15 determines in step S30 that learning has not ended (step S30: No), the process proceeds to step S22, and learning of the search model M continues.
- step S30 the end of learning of the search model M may be determined, for example, based on whether or not all of the plurality of initial lamination patterns generated in step S21 or a predetermined number have been executed. The termination of learning of the search model M is not particularly limited to the above, and any determination may be made.
- step S25 when the control unit 15 determines that the lamination pattern P satisfies the constraint conditions by executing step S25, the process proceeds to step S29.
- the method is not particularly limited to this method, and even if step S25 is omitted and the lamination pattern P satisfies the constraint conditions, the search by the search model M is repeatedly executed until the predetermined number of episode steps is reached. good too.
- the design pattern is the lamination pattern P of the laminate 1 that satisfies the constraints. Note that FIG. 6 describes a case where the design pattern of the laminate 1 and the lamination pattern P used in the search model M have the same number of laminations.
- the control unit 15 of the design device 10 executes step S31 of deriving a candidate pattern, which is a lamination pattern P that is a candidate for the lamination body 1, according to a predetermined algorithm. do.
- the predetermined algorithm used in step S31 is, for example, a genetic algorithm.
- a candidate pattern is a lamination pattern for all lamination of the laminated body 1 derived by a predetermined algorithm.
- the derived candidate pattern is used as the lamination pattern P to be input to the search model M.
- the control unit 15 inputs the candidate pattern to the search model M (step S32).
- the control unit 15 sets the input candidate pattern as the state of the lamination pattern P (step S33).
- control unit 15 uses the learned search model M to execute steps S33 to S38. Since steps S33 to S38 are the same steps as steps S23 to S28 in FIG. 5, description thereof is omitted.
- control unit 15 determines in step S34 that the predetermined number of episode steps has been reached, or determines in step S35 that the lamination pattern P satisfies the constraint conditions, it selects the lamination pattern P as the search result. Output as a design pattern (step S39). After executing step S39, the control unit 15 ends the process related to the design method.
- the number of laminations of the design pattern of the laminate 1 may be greater than the number of laminations of the lamination pattern P used for the search model M.
- the control unit 15 after executing step S31 for deriving the candidate pattern of the laminate 1, extracts the laminate pattern P that does not satisfy the constraint condition from among the candidate patterns of the laminate 1 as an extraction pattern. Execute the step. Then, the control unit 15 inputs the extraction pattern to the search model M in step S32.
- the control unit 15, in step S32 arranges the plurality of laminate patterns P in the lamination direction so as to cover the number of laminates of the laminate 1.
- the control unit 15 sets so that a part of the arranged lamination patterns P overlaps.
- the candidate patterns are divided into blocks by the number of lamination of the lamination pattern P used in the search model M, and each lamination pattern P is optimized so as to satisfy the constraint conditions.
- the lamination pattern P used in the search model M may be set so as to straddle the interface between blocks, and the lamination pattern P straddling the interface may be optimized so as to satisfy the constraint conditions.
- step S41 of laminating the fiber sheets S based on the design pattern derived by the design device 10 is executed.
- step S41 for example, the fiber sheets S are stacked using an automatic stacking device that automatically stacks the fiber sheets S. That is, in step S41, by inputting the design pattern derived by the design device 10 into the automatic lamination device, the fiber sheets S are laminated so as to form a predetermined design pattern.
- step S42 of forming the laminate 1 by integrating the laminated fiber sheets S is performed.
- step S42 if the fiber sheet S is a reinforcing fiber sheet impregnated with a thermosetting resin, the resin is thermally cured by heating to integrate a plurality of laminated fiber sheets S into a laminate. 1.
- the learning method of the design device 10 (learning device), the design pattern design method, the laminate manufacturing method, and the design pattern design device 10 according to the present embodiment can be grasped, for example, as follows. be.
- a fiber sheet S is used as a unidirectional member in which the orientation direction of the fibers is unidirectional, and the fiber sheets S are laminated to form the A learning method for a learning device (design device 10) in which a learning device (design device 10) learns a search model M for searching a lamination pattern P of a laminate 1, wherein the search model M is the fiber sheet.
- a step S12 of learning the search model so as to obtain the lamination pattern P that satisfies the constraints by using the initial lamination pattern as an input is executed.
- the lamination pattern P can be used as an input for the search model M, it is easier to search for the lamination pattern P that satisfies the constraint conditions of the search model M compared to the case where physical property values are used as inputs. can be derived.
- the search model M is a learning model that combines Monte Carlo tree search and deep reinforcement learning.
- the step S12 of learning the search model M includes a step S11 of acquiring the lamination pattern P satisfying the constraint condition as the initial lamination pattern, and a step S11 of acquiring the lamination pattern P satisfying the constraint condition.
- the lamination pattern P that does not satisfy the constraint can be generated by using the lamination pattern P that satisfies the constraint, so the amount of data used for learning the search model M can be reduced.
- the layers of the adjacent fiber sheets S are exchanged to execute the search.
- the search rule for the lamination pattern P can be a simple rule, it is possible to efficiently search for the lamination pattern P that satisfies the constraint conditions by searching based on the simple rule.
- the search model M the fewer the number of times the layers of the fiber sheet S are replaced during the search of the lamination pattern P by the search model M, the reward in the value function. is learning to become higher.
- the constraint conditions include a condition regarding the continuity of the fiber sheets in which the orientation directions are the same in the lamination direction, and an orientation angle formed by the orientation directions of the fiber sheets adjacent in the lamination direction. and/or a condition regarding the difference.
- the laminate 1 that becomes the laminate pattern P having the required properties (strength, rigidity, occurrence and progression of damage).
- condition regarding the continuity of the fiber sheet S is a condition that the number of continuous layers of the fiber sheet S is 3 layers or less, and the condition regarding the difference in orientation angle is that the difference in orientation angle is 45° or less. It is a condition to be
- the number of laminations in the lamination pattern P used in the search model M is smaller than the number of laminations of the laminate.
- the number of layers of the layer pattern P used in the search model M can be made smaller than the number of layers of the layered body 1, so the learning load of the search model M can be reduced.
- a design pattern design method uses the search model learned by the learning method of the learning device to generate a design pattern, which is the lamination pattern of the lamination body that satisfies the constraint, by the design device.
- Steps S32 to S39 of inputting the pattern into the search model and deriving the design pattern, which is the lamination pattern that satisfies the constraint, are executed.
- the candidate pattern of the laminate is derived.
- the extraction pattern is input to the search model.
- the laminate 1 that satisfies the constraint. design pattern can be derived.
- the design pattern P that satisfies the constraint conditions is derived.
- steps S32 to S39 a plurality of lamination patterns P are arranged and set so as to cover the candidate patterns, and the arranged lamination patterns P are set such that a portion of the arranged lamination patterns P overlaps.
- the layered pattern P of the search model M can be set over all the number of layers of the candidate patterns of the layered body 1. can be done. Therefore, it is possible to obtain a design pattern of the laminate 1 that satisfies the constraint conditions.
- the steps S32 to S39 of deriving the design pattern that satisfies the constraint conditions replace the layers of the adjacent fiber sheets S when searching for the lamination pattern P by the search model M. , to perform a search.
- the search rule for the lamination pattern P can be a simple rule, it is possible to efficiently search for the lamination pattern P that satisfies the constraint conditions by searching based on the simple rule.
- a method for manufacturing a laminate 1 according to a thirteenth aspect comprises a step S41 of laminating the fiber sheets S based on the design pattern designed by the design pattern design method described above; Step S42 of integrating to form the laminate 1 is executed.
- a design pattern designing device 10 uses the search model M learned by the learning method of the learning device (designing device 10) to determine the lamination pattern of the laminate 1 that satisfies the constraint conditions.
- a design pattern designing apparatus 10 for designing a design pattern P comprising a step S31 of deriving a candidate pattern that is the lamination pattern P that is a candidate for the lamination body 1 by a predetermined algorithm;
- a control unit 15 for executing steps S32 to S39 of inputting the candidate pattern to the search model M and deriving a design pattern that is the lamination pattern P that satisfies the constraint conditions.
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Evolutionary Computation (AREA)
- Software Systems (AREA)
- General Engineering & Computer Science (AREA)
- Artificial Intelligence (AREA)
- Geometry (AREA)
- Computing Systems (AREA)
- Data Mining & Analysis (AREA)
- Mathematical Physics (AREA)
- Medical Informatics (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Mechanical Engineering (AREA)
- Composite Materials (AREA)
- Chemical & Material Sciences (AREA)
- Computational Linguistics (AREA)
- Computer Hardware Design (AREA)
- Mathematical Analysis (AREA)
- Biomedical Technology (AREA)
- Pure & Applied Mathematics (AREA)
- Computational Mathematics (AREA)
- Robotics (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Mathematical Optimization (AREA)
- Biophysics (AREA)
- General Health & Medical Sciences (AREA)
- Molecular Biology (AREA)
- Moulding By Coating Moulds (AREA)
- Laminated Bodies (AREA)
- Image Analysis (AREA)
- Golf Clubs (AREA)
Abstract
繊維の配向方向が一方向となる一方向材としての繊維シートを用いて、前記繊維シートを積層して形成される積層体の積層パターンを探索するための探索モデルを、学習装置が学習する学習装置の学習方法であって、前記探索モデルは、前記繊維シートの積層に関する制約条件を含む方策関数及び価値関数を用いた学習モデルとなっており、前記学習装置に、初期状態の前記積層パターンである初期積層パターンを取得するステップと、前記初期積層パターンを入力として、前記制約条件を満足する前記積層パターンとなるように、前記探索モデルを学習させるステップと、を実行させる。
Description
本開示は、学習装置の学習方法、設計パターンの設計方法、積層体の製造方法及び設計パターンの設計装置に関するものである。
従来、積層体である複合材料積層構造体の積層構成を設計する複合材料積層構造体の設計方法が知られている(例えば、特許文献1参照)。この設計方法では、物性値から積層構成を予測する予測モデルとしての関係式を用いて、物性値を入力として、積層構成を算出している。
積層構成には、積層方向において積層順等の制約条件がある。制約条件としては、例えば、隣接する2つの層同士の繊維の配向方向が為す配向角度の差が45°以下となる条件等がある。特許文献1の設計方法では、物性値に基づき、関係式を用いて、上記の制約条件を考慮した積層構成の情報である積層構成情報を算出するとしている。
しかしながら、特許文献1では、入力値として物性値を用いる場合、上記の制約条件を考慮した積層構成情報を算出しようとすると、解を予測することができず、積層構成情報を得られない可能性がある。また、特許文献1では、解が収束する場合であっても、計算時間がかかってしまう可能性があり、積層数が増えるほど計算時間が増大し、計算コストの増大の抑制を図ることが困難となる。
そこで、本開示は、制約条件を考慮した適切な積層パターンを容易に導出することができる学習装置の学習方法、設計パターンの設計方法、積層体の製造方法及び設計パターンの設計装置を提供することを課題とする。
本開示の学習装置の学習方法は、繊維の配向方向が一方向となる一方向材としての繊維シートを用いて、前記繊維シートを積層して形成される積層体の積層パターンを探索するための探索モデルを、学習装置が学習する学習装置の学習方法であって、前記探索モデルは、前記繊維シートの積層に関する制約条件を含むと共に、方策関数及び価値関数を用いた学習モデルとなっており、前記学習装置に、初期状態の前記積層パターンである初期積層パターンを取得するステップと、前記初期積層パターンを入力として、前記制約条件を満足する前記積層パターンとなるように、前記探索モデルを学習させるステップと、を実行させる。
本開示の設計パターンの設計方法は、上記の学習装置の学習方法により学習した前記探索モデルを用いて、前記制約条件を満足する前記積層体の積層パターンである設計パターンを、設計装置を用いて設計する設計パターンの設計方法であって、前記設計装置に、所定のアルゴリズムにより前記積層体の候補となる前記積層パターンである候補パターンを導出するステップと、前記積層体の前記候補パターンを前記探索モデルに入力して、前記制約条件を満足する前記積層パターンである設計パターンを導出するステップと、を実行させる。
本開示の積層体の製造方法は、上記の設計パターンの設計方法により設計された前記設計パターンに基づいて、前記繊維シートを積層するステップと、積層した前記繊維シートを一体化して前記積層体を形成するステップと、を実行する。
本開示の設計パターンの設計装置は、上記の学習装置の学習方法により学習した前記探索モデルを用いて、前記制約条件を満足する前記積層体の積層パターンである設計パターンを設計する設計パターンの設計装置であって、所定のアルゴリズムにより前記積層体の候補となる前記積層パターンである候補パターンを導出するステップと、前記積層体の前記候補パターンを前記探索モデルに入力して、前記制約条件を満足する前記積層パターンである設計パターンを導出するステップと、を実行する制御部を備える。
本開示によれば、制約条件を考慮した適切な積層パターンを迅速に導出することができる。
以下に、本開示に係る実施形態を図面に基づいて詳細に説明する。なお、この実施形態によりこの発明が限定されるものではない。また、下記実施形態における構成要素には、当業者が置換可能かつ容易なもの、あるいは実質的に同一のものが含まれる。さらに、以下に記載した構成要素は適宜組み合わせることが可能であり、また、実施形態が複数ある場合には、各実施形態を組み合わせることも可能である。
[本実施形態]
本実施形態に係る学習装置の学習方法、設計パターンの設計方法、積層体の製造方法及び設計パターンの設計装置は、繊維シートSを積層して形成される積層体1の積層パターンPに関するものである。図1は、積層パターンに関する説明図である。図2は、本実施形態に係る設計パターンの設計装置に関する図である。図3は、探索モデルに関する説明図である。図4は、本実施形態に係る設計装置の学習方法に関するフローチャートである。図5は、探索モデルの学習に関するフローチャートである。図6は、本実施形態に係る設計パターンの設計方法に関するフローチャートである。図7は、本実施形態に係る積層体の製造方法に関するフローチャートである。
本実施形態に係る学習装置の学習方法、設計パターンの設計方法、積層体の製造方法及び設計パターンの設計装置は、繊維シートSを積層して形成される積層体1の積層パターンPに関するものである。図1は、積層パターンに関する説明図である。図2は、本実施形態に係る設計パターンの設計装置に関する図である。図3は、探索モデルに関する説明図である。図4は、本実施形態に係る設計装置の学習方法に関するフローチャートである。図5は、探索モデルの学習に関するフローチャートである。図6は、本実施形態に係る設計パターンの設計方法に関するフローチャートである。図7は、本実施形態に係る積層体の製造方法に関するフローチャートである。
(積層体)
図1は、上側の図が、制約条件を満たしていない積層体1の積層パターンPを示す図となっており、下側の図が、制約条件を満たす積層体1の積層パターンPを示す図となっている。図1に示すように、積層体1は、複数の繊維シートSを積層方向に並べて積層し、一体成形することで形成されるものである。繊維シートSは、例えば、強化繊維に樹脂を含侵させたプリプレグであり、繊維の配向方向が一方向となる一方向材となっている。なお、繊維シートSは、プリプレグに特に限定されず、樹脂を含侵させていないドライ状態の強化繊維シートであってもよい。積層体1は、積層方向において、所定の積層パターンPとなっている。積層パターンPとは、基準方向と各繊維シートSの配向方向とが為す配向角度の積層方向における並び順である。
図1は、上側の図が、制約条件を満たしていない積層体1の積層パターンPを示す図となっており、下側の図が、制約条件を満たす積層体1の積層パターンPを示す図となっている。図1に示すように、積層体1は、複数の繊維シートSを積層方向に並べて積層し、一体成形することで形成されるものである。繊維シートSは、例えば、強化繊維に樹脂を含侵させたプリプレグであり、繊維の配向方向が一方向となる一方向材となっている。なお、繊維シートSは、プリプレグに特に限定されず、樹脂を含侵させていないドライ状態の強化繊維シートであってもよい。積層体1は、積層方向において、所定の積層パターンPとなっている。積層パターンPとは、基準方向と各繊維シートSの配向方向とが為す配向角度の積層方向における並び順である。
図1の上側の図において、積層体1の積層パターンPは、配向角度が(0,45,90,0,45,90,-45,45,0,0,0,0)となっている。ここで、積層パターンPには、求められる特性から制約条件が課されることがある。制約条件は、積層方向において隣接する繊維シートS同士の配向角度の差が45°以下となる第1条件と、積層方向において、配向方向が同一方向となる繊維シートSの連続が3層以下となる第2条件とを含む。図1の上側の図では、点線C1で囲った隣接する繊維シートSにおいて、第1条件が満たされておらず、点線C2で囲った並んだ繊維シートSにおいて、第2条件が満たされていないものとなっている。これに対して、図1の下側の図において、積層体1の積層パターンPは、配向角度が(0,0,45,90,45,90,-45,0,45,0,0,0)となっており、上記の制約条件を満たしたものとなっている。なお、制約条件の第1条件は、配向角度の差が45°以下となる条件であったが、配向角度については特に限定されず、何れの配向角度であってもよい。また、制約条件の第2条件は、繊維シートSの連続が3層以下となるとなる条件であったが、層数については特に限定されず、何れの層数であってもよい。さらに、制約条件は、積層体1に求められる特性に応じた条件であってもよく、第1条件及び第2条件に特に限定されない。
(設計パターンの設計装置)
設計パターンの設計装置10は、制約条件を満足する積層体1の積層パターンPである設計パターンを設計する装置となっている。また、設計装置10は、積層パターンPを探索するための探索モデルMを学習するための学習装置としても機能している。なお、本実施形態では、設計装置10と学習装置とは、一体となっているが、特に限定されず、別体として構成してもよい。
設計パターンの設計装置10は、制約条件を満足する積層体1の積層パターンPである設計パターンを設計する装置となっている。また、設計装置10は、積層パターンPを探索するための探索モデルMを学習するための学習装置としても機能している。なお、本実施形態では、設計装置10と学習装置とは、一体となっているが、特に限定されず、別体として構成してもよい。
図2に示すように、設計装置10は、制御部15と、記憶部16とを備えている。
記憶部16は、プログラム及びデータを記憶している。また、記憶部16は、制御部15の処理結果を一時的に記憶する作業領域としても機能してもよい。記憶部16は、半導体記憶デバイス、及び磁気記憶デバイス等の任意の記憶デバイスを含んでよい。
記憶部16は、プログラムとして、探索モデルMを含む。探索モデルMは、積層体1の積層パターンPを探索する学習モデルである。探索モデルMは、モンテカルロ木探索と深層強化学習とを組み合わせた、上記の制約条件を含む学習モデルとなっている。探索モデルMでは、方策関数と価値関数とが用いられており、積層方向において隣接する繊維シートSの配向角度を入れ替えることで、制約条件を満たす積層パターンPの探索を行っている。また、この探索モデルMは、教師データなしで学習可能な学習モデルとなっている。記憶部16は、データとして、積層パターンPに関する積層データD1と、制約条件に関する制約データD2と、を記憶している。積層データD1は、図1に示す積層パターンPに関する情報であり、入力として用いられる積層データD1と、出力として取得する積層データD1とを含む。制約データD2は、上記した第1条件及び第2条件に関する情報である。
制御部15は、プログラムを実行したり、記憶部16との間でデータを授受したりする。制御部15は、例えば、CPU(Central Processing Unit)等の集積回路を含んでいる。具体的に、制御部15は、記憶部16に記憶されている積層データD1及び制約データD2を用いて、探索モデルMの学習を実行している。また、制御部15は、学習済みの探索モデルMを用いて、制約条件を満たす積層体1の積層パターンPを導出している。
ここで、図3を参照して、制御部15により、探索モデルMを用いた、制約条件を満たす積層体1の積層パターンPの導出について説明する。図3の上側の積層パターンPは、図1の上側の積層パターンPに相当し、制約条件を満たさない積層パターンPとなっている。図3の下側の積層パターンPは、図1の下側の積層パターンPに相当し、制約条件を満たす積層パターンPとなっている。図3では、制約条件を満たさない積層パターンPが入力されると、モンテカルロ木探索と深層強化学習とを組み合わせた探索モデルMにより、積層方向に隣接する繊維シートSの配向角度の入れ替えが行われる。図3では、学習済みの探索モデルMが用いられており、具体的に、探索モデルMに含まれる学習済みの方策関数及び価値関数が用いられる。このため、探索モデルMは、繊維シートSの配向角度の入れ替えに関する探索を行い、探索を行った探索結果から、報酬が高い方策となる繊維シートSの配向角度の入れ替えを選択する。そして、探索モデルMは、繊維シートSの配向角度の入れ替えによって制約条件を満たすと、制約条件を満たす積層パターンPを解として導出する。
図3に示すように、探索モデルMで用いられる積層パターンPは、その積層数が、例えば、12層となっている。本実施形態において、積層パターンPの積層数は、積層体1の積層数よりも少ない積層数となっている。なお、積層パターンPの積層数は、積層体1の積層数と同じ積層数であってもよい。
(設計装置の学習方法)
次に、図4及び図5を参照して、上記の設計装置10が探索モデルMを学習する設計装置10の学習方法について説明する。
次に、図4及び図5を参照して、上記の設計装置10が探索モデルMを学習する設計装置10の学習方法について説明する。
図4に示すように、設計装置(学習装置)の学習方法において、先ず、設計装置10の制御部15は、初期状態の積層パターンPである初期積層パターンを取得するステップを実行する(ステップS11)。初期積層パターンとしては、例えば、制約条件を満たした積層パターンである。続いて、制御部15は、初期積層パターンを用いて、探索モデルMを学習させるステップS12を実行する。つまり、ステップS12では、探索モデルMが教師データなしで学習可能なモデルとなっていることから、初期積層パターンを用いて、探索モデルMの学習を実行することができる。この後、制御部15は、学習後の探索モデルMが性能を満足しているか否かを評価する(ステップS13)。ステップS13では、学習済みの探索モデルMに、評価用の入力となる積層パターンPを入力し、出力された積層パターンPが制約条件を満足しているか否かを評価することで、探索モデルMの性能を評価している。制御部15は、ステップS13において、探索モデルMの性能を満足したと判定する場合(ステップS13:Yes)、探索モデルMの評価を終了する。一方で、制御部15は、ステップS13において、探索モデルMの性能を満足していないと判定する場合(ステップS13:No)、ステップS12に進み、探索モデルMの学習を再び実行する。
次に、図5を参照して、探索モデルMの学習に関するステップS12について、具体的に説明する。探索モデルMの学習において、制御部15は、ステップS11において制約条件を満足する初期積層パターンを取得すると、初期積層パターンの一部の繊維シートSの層を入れ替えて、制約条件を満足しない初期積層パターンを複数生成する(ステップS21)。ステップS21では、隣接する繊維シートの層同士を入れ替えてもよいし、繊維シートの層をランダムに入れ替えてもよく、特に限定されない。続いて、制御部15は、制約条件を満足しない複数の初期積層パターンの中から、1つの初期積層パターンを入力として選択する(ステップS22)。制御部15は、入力とした初期積層パターンを、積層パターンPのステートとする(ステップS23)。続いて、制御部15は、所定のエピソードステップ数に達したか否かを判定する(ステップS24)。ここで、エピソードステップ数とは、ステップS23を起点として、後述するステップS26からステップS28を経て、再びステップS23に戻るまでの一連のフローを一つのエピソードステップとし、このエピソードステップの繰り返し数となっている。そして、所定のエピソードステップ数は、予め規定された数値となっている。制御部15は、所定のエピソードステップ数に達していると判定する(ステップS24:Yes)と、後述するステップS29に進む。一方で、制御部15は、所定のエピソードステップ数に達していないと判定する(ステップS24:No)と、ステップS25に進む。
制御部15は、ステップS25において、ステップS23においてステートとした積層パターンPが、制約条件を満足したか否かを判定する(ステップS25)。制御部15は、積層パターンPが制約条件を満足したと判定する(ステップS25:Yes)と、後述するステップS29に進む。一方で、制御部15は、積層パターンPが制約条件を満足していないと判定する(ステップS25:No)と、探索モデルMを用いて、ステップS23においてステートとした積層パターンPに基づく探索を実行する(ステップS26)。ステップS26では、積層パターンPにおいて、隣接する繊維シートSの層同士を入れ替えて探索を実行している。そして、制御部15は、ステップS26において、探索の実行による結果である探索結果を取得する。この後、制御部15は、探索回数が、予め規定した所定回数に達したか否かを判定する(ステップS27)。制御部15は、探索回数が所定回数に達していないと判定する(ステップS27:No)と、再びステップS26に進んで探索を再実行する。このように、ステップS26は、所定の探索回数となるまで、繰り返し探索が実行される。
制御部15は、ステップS27において、探索回数が所定回数に達していると判定する(ステップS27:Yes)と、探索回数に応じた複数の探索結果の情報を用いて、入れ替え後の1つの積層パターンPを選択するアクション(行動)を選択・実行し(ステップS28)、ステップS23に進む。制御部15は、ステップS23において、ステップS28において選択した積層パターンPのステートとする。なお、制御部15は、ステップS28においてアクションを実行することにより、エピソードステップ数をカウントアップする(「+1」に増やす)。
制御部15は、ステップS24において、所定のエピソードステップ数に達していると判定するか、または、ステップS25において、積層パターンPが制約条件を満足したと判定すると、ステップS29に進む。制御部15は、ステップS29において、探索モデルMに含まれる方策関数及び価値関数を更新する。ステップS29では、全てのエピソードステップを実行することで得られた情報に基づいて方策関数及び価値関数を更新する。具体的に、ステップS29では、探索モデルMによる積層パターンPの探索時において、繊維シートSの層同士の入れ替えの回数が少ないほど報酬が高くなるように、方策関数及び価値関数を更新する。そして、制御部15は、探索モデルMの学習が終了したか否かを判定する(ステップS30)。ステップS30において、制御部15は、学習が終了したと判定する(ステップS30:Yes)と、ステップS13に進む。一方で、ステップS30において、制御部15は、学習が終了していないと判定する(ステップS30:No)と、ステップS22に進み、探索モデルMの学習を継続する。ステップS30では、探索モデルMの学習の終了を、例えば、ステップS21において生成した複数の初期積層パターンの全て、または所定の数を実行したか否かに基づいて判定してもよい。探索モデルMの学習の終了については、上記に特に限定されず、何れの判定であってもよい。
なお、上記の学習方法では、ステップS25を実行することで、制御部15が、積層パターンPが制約条件を満足したと判定すると、ステップS29に進む。しかしながら、この方法に特に限定されず、ステップS25を省き、積層パターンPが制約条件を満足した場合であっても、所定のエピソードステップ数に達するまでは、探索モデルMによる探索を繰り返し実行してもよい。
(設計パターンの設計方法)
次に、図6を参照して、上記の設計装置10を用いた設計パターンの設計方法について説明する。設計パターンは、制約条件を満足する積層体1の積層パターンPである。なお、図6では、積層体1の設計パターンと、探索モデルMで用いられる積層パターンPとが同じ積層数となっている場合について説明する。
次に、図6を参照して、上記の設計装置10を用いた設計パターンの設計方法について説明する。設計パターンは、制約条件を満足する積層体1の積層パターンPである。なお、図6では、積層体1の設計パターンと、探索モデルMで用いられる積層パターンPとが同じ積層数となっている場合について説明する。
図6に示すように、設計パターンの設計方法において、先ず、設計装置10の制御部15は、所定のアルゴリズムにより積層体1の候補となる積層パターンPである候補パターンを導出するステップS31を実行する。ステップS31で用いられる所定のアルゴリズムとしては、例えば、遺伝的アルゴリズムである。候補パターンは、所定のアルゴリズムによって導出された積層体1の全積層に関する積層パターンである。ステップS31では、導出された候補パターンを、探索モデルMに入力する積層パターンPとしている。続いて、制御部15は、候補パターンを探索モデルMに入力する(ステップS32)。制御部15は、入力とした候補パターンを、積層パターンPのステートとする(ステップS33)。続いて、制御部15は、学習済みの探索モデルMを用いて、ステップS33からステップS38を実行する。ステップS33からステップS38は、図5のステップS23からステップS28と同じステップとなるため、説明を省略する。制御部15は、ステップS34において、所定のエピソードステップ数に達していると判定するか、または、ステップS35において、積層パターンPが制約条件を満足したと判定すると、探索結果となる積層パターンPを設計パターンとして出力する(ステップS39)。制御部15は、ステップS39の実行後、設計方法に関する処理を終了する。
ここで、積層体1の設計パターンの積層数は、探索モデルMに用いられる積層パターンPの積層数よりも多い場合がある。この場合、一例として、制御部15は、積層体1の候補パターンを導出するステップS31の実行後、積層体1の候補パターンのうち、制約条件を満たしていない積層パターンPを抽出パターンとして抽出するステップを実行する。そして、制御部15は、ステップS32において、抽出パターンを探索モデルMに入力する。また、他の一例として、制御部15は、積層体1の候補パターンを導出するステップS31の実行後、ステップS32において、積層体1の積層数の覆うように、複数の積層パターンPを積層方向に並べて設定する。このとき、制御部15は、並べた複数の積層パターンPの一部が重複するように設定する。複数の積層パターンPを重複させる一例として、探索モデルMで用いる積層パターンPの積層数で、候補パターンをブロック単位に分割して、各積層パターンPが制約条件を満足するように適正化し、この後、ブロック同士の界面を跨ぐように、探索モデルMで用いる積層パターンPを設定して、界面を跨ぐ積層パターンPが制約条件を満足するように適正化してもよい。
(積層体の製造方法)
次に、図7を参照して、上記の設計装置10により設計された積層パターンPに基づく積層体の製造方法について説明する。
次に、図7を参照して、上記の設計装置10により設計された積層パターンPに基づく積層体の製造方法について説明する。
図7に示すように、積層体1の製造方法では、先ず、設計装置10により導出された設計パターンに基づいて、繊維シートSを積層するステップS41を実行する。ステップS41では、例えば、繊維シートSを自動で積層する自動積層装置を用いて繊維シートSを積層する。つまり、ステップS41では、自動積層装置に、設計装置10により導出された設計パターンを入力することで、所定の設計パターンとなるように繊維シートSを積層する。続いて、積層体1の製造方法では、積層した繊維シートSを一体化して積層体1を形成するステップS42を実行する。ステップS42では、繊維シートSとして、熱硬化性樹脂を含侵させた強化繊維シートである場合には、加熱により樹脂を熱硬化させることで、積層した複数の繊維シートSを一体化して積層体1とする。
以上のように、本実施形態に記載の設計装置10(学習装置)の学習方法、設計パターンの設計方法、積層体の製造方法及び設計パターンの設計装置10は、例えば、以下のように把握される。
第1の態様に係る学習装置(設計装置10)の学習方法は、繊維の配向方向が一方向となる一方向材としての繊維シートSを用いて、前記繊維シートSを積層して形成される積層体1の積層パターンPを探索するための探索モデルMを、学習装置(設計装置10)が学習する学習装置(設計装置10)の学習方法であって、前記探索モデルMは、前記繊維シートSの積層に関する制約条件を含むと共に、方策関数及び価値関数を用いた学習モデルとなっており、前記学習装置に、初期状態の前記積層パターンPである初期積層パターンを取得するステップS11と、前記初期積層パターンを入力として、前記制約条件を満足する前記積層パターンPとなるように、前記探索モデルを学習させるステップS12と、を実行させる。
この構成によれば、積層パターンPを探索モデルMの入力とすることができるため、入力として物性値を用いる場合と比べて、探索モデルMによる制約条件を満足する積層パターンPの探索を容易に導出することができる。
第2の態様として、前記探索モデルMは、モンテカルロ木探索と深層強化学習とを組み合わせた学習モデルである。
この構成によれば、探索モデルMによる効率の良い探索を実行することができる。
第3の態様として、前記探索モデルMを学習させるステップS12は、前記初期積層パターンとして、前記制約条件を満足する前記積層パターンPを取得するステップS11と、前記制約条件を満足する前記積層パターンPの一部の前記繊維シートSの層を入れ替えて、前記制約条件を満足しない前記積層パターンPを生成するステップS21と、前記制約条件を満足しない前記積層パターンPを、前記初期積層パターンの入力として選択するステップS22と、を含む。
この構成によれば、制約条件を満足する積層パターンPを用いて、制約条件を満足しない積層パターンPを生成することができるため、探索モデルMの学習に用いるデータ量を低減することができる。
第4の態様として、前記探索モデルMを学習させるステップS12は、前記探索モデルMによる前記積層パターンPの探索時において、隣接する前記繊維シートSの層同士を入れ替えて、探索を実行する。
この構成によれば、積層パターンPの探索のルールを簡易なルールとすることができるため、簡易なルールに基づく探索により、制約条件を満足する積層パターンPを効率よく探索することができる。
第5の態様として、前記探索モデルMを学習させるステップS12は、前記探索モデルMによる前記積層パターンPの探索時における前記繊維シートSの層同士の入れ替えの回数が少ないほど、前記価値関数における報酬が高くなる学習となっている。
この構成によれば、制約条件を考慮した適切な積層パターンPを迅速に導出する探索モデルMとして学習させることができる。
第6の態様として、前記制約条件は、積層方向において、前記配向方向が同一方向となる前記繊維シートの連続性に関する条件と、積層方向において隣接する前記繊維シート同士の配向方向が為す配向角度の差に関する条件と、の少なくともいずれかを含む。
この構成によれば、求められる特性(強度・剛性・損傷の発生及び進展)を有する積層パターンPとなる積層体1を形成することができる。
第7の態様として、前記繊維シートSの連続性に関する条件は、前記繊維シートSの連続が3層以下となる条件であり、前記配向角度の差に関する条件は、配向角度の差が45°以下となる条件である。
この構成によれば、積層体に求められる特性を適切に調整することができる。
第8の態様として、前記探索モデルMで用いられる前記積層パターンPにおける積層数は、前記積層体の積層数よりも少ない積層数となっている。
この構成によれば、積層体1の積層数よりも、探索モデルMで用いられる積層パターンPの積層数を少なくできるため、探索モデルMの学習負荷を軽減することができる。
第9の態様に係る設計パターンの設計方法は、上記の学習装置の学習方法により学習した前記探索モデルを用いて、前記制約条件を満足する前記積層体の積層パターンである設計パターンを、設計装置を用いて設計する設計パターンの設計方法であって、前記設計装置に、所定のアルゴリズムにより前記積層体の候補となる前記積層パターンである候補パターンを導出するステップS31と、前記積層体の前記候補パターンを前記探索モデルに入力して、前記制約条件を満足する前記積層パターンである設計パターンを導出するステップS32~S39と、を実行させる。
この構成によれば、候補パターンを入力とし、探索モデルMを用いることで、制約条件を考慮した適切な設計パターンを容易に導出することができる。
第10の態様として、前記積層体1の前記設計パターンの積層数が、前記探索モデルに用いられる前記積層パターンにおける積層数よりも多い積層数である場合、前記積層体の前記候補パターンを導出するステップS31の実行後、導出された前記積層体の前記候補パターンのうち、前記制約条件を満たしていない前記積層パターンを抽出パターンとして抽出するステップを実行し、前記制約条件を満足する前記設計パターンを導出するステップS32~S39では、前記抽出パターンを前記探索モデルに入力する。
この構成によれば、積層体1の候補パターンの一部である制約条件を満たしていない抽出パターンに対して、探索モデルMの積層パターンPを設定することで、制約条件を満足した積層体1の設計パターンを導出することができる。
第11の態様として、前記積層体1の積層数が、前記探索モデルMに用いられる前記積層パターンPにおける積層数よりも多い積層数である場合、前記制約条件を満足する前記設計パターンPを導出するステップS32~S39では、前記候補パターンを覆うように、複数の前記積層パターンPを並べて設定すると共に、並べた複数の前記積層パターンPの一部が重複するように設定する。
この構成によれば、探索モデルMの積層パターンPの積層数が少ない場合であっても、積層体1の候補パターンの全ての積層数に亘って、探索モデルMの積層パターンPを設定することができる。このため、制約条件を満足した積層体1の設計パターンとすることができる。
第12の態様として、前記制約条件を満足する前記設計パターンを導出するステップS32~S39は、前記探索モデルMによる前記積層パターンPの探索時において、隣接する前記繊維シートSの層同士を入れ替えて、探索を実行する。
この構成によれば、積層パターンPの探索のルールを簡易なルールとすることができるため、簡易なルールに基づく探索により、制約条件を満足する積層パターンPを効率よく探索することができる。
第13の態様に係る積層体1の製造方法は、上記の設計パターンの設計方法により設計された前記設計パターンに基づいて、前記繊維シートSを積層するステップS41と、積層した前記繊維シートSを一体化して前記積層体1を形成するステップS42と、を実行する。
この構成によれば、制約条件を満足した積層パターンPとなる積層体1を製造することができる。
第14の態様に係る設計パターンの設計装置10は、上記の学習装置(設計装置10)の学習方法により学習した前記探索モデルMを用いて、前記制約条件を満足する前記積層体1の積層パターンPである設計パターンを設計する設計パターンの設計装置10であって、所定のアルゴリズムにより前記積層体1の候補となる前記積層パターンPである候補パターンを導出するステップS31と、前記積層体1の前記候補パターンを前記探索モデルMに入力して、前記制約条件を満足する前記積層パターンPである設計パターンを導出するステップS32~S39と、を実行する制御部15を備える。
この構成によれば、候補パターンPを入力とし、探索モデルMを用いることで、制約条件を考慮した適切な設計パターンを容易に導出することができる。
1 積層体
10 設計装置
15 制御部
16 記憶部
S 繊維シート
P 積層パターン
M 探索モデル
D1 積層データ
D2 制約データ
10 設計装置
15 制御部
16 記憶部
S 繊維シート
P 積層パターン
M 探索モデル
D1 積層データ
D2 制約データ
Claims (14)
- 繊維の配向方向が一方向となる一方向材としての繊維シートを用いて、前記繊維シートを積層して形成される積層体の積層パターンを探索するための探索モデルを、学習装置が学習する学習装置の学習方法であって、
前記探索モデルは、前記繊維シートの積層に関する制約条件を含むと共に、方策関数及び価値関数を用いた学習モデルとなっており、
前記学習装置に、
初期状態の前記積層パターンである初期積層パターンを取得するステップと、
前記初期積層パターンを入力として、前記制約条件を満足する前記積層パターンとなるように、前記探索モデルを学習させるステップと、を実行させる学習装置の学習方法。 - 前記探索モデルは、モンテカルロ木探索と深層強化学習とを組み合わせた学習モデルである請求項1に記載の学習装置の学習方法。
- 前記探索モデルを学習させるステップは、
前記初期積層パターンとして、前記制約条件を満足する前記積層パターンを取得するステップと、
前記制約条件を満足する前記積層パターンの一部の前記繊維シートの層を入れ替えて、前記制約条件を満足しない前記積層パターンを生成するステップと、
前記制約条件を満足しない前記積層パターンを、前記初期積層パターンの入力として選択するステップと、を含む請求項1または2に記載の学習装置の学習方法。 - 前記探索モデルを学習させるステップは、
前記探索モデルによる前記積層パターンの探索時において、隣接する前記繊維シートの層同士を入れ替えて、探索を実行する請求項1から3のいずれか1項に記載の学習装置の学習方法。 - 前記探索モデルを学習させるステップは、
前記探索モデルによる前記積層パターンの探索時における前記繊維シートの層同士の入れ替えの回数が少ないほど、前記価値関数における報酬が高くなる学習となっている請求項4に記載の学習装置の学習方法。 - 前記制約条件は、積層方向において、前記配向方向が同一方向となる前記繊維シートの連続性に関する条件と、積層方向において隣接する前記繊維シート同士の配向方向が為す配向角度の差に関する条件と、の少なくともいずれかを含む請求項1から5のいずれか1項に記載の学習装置の学習方法。
- 前記繊維シートの連続性に関する条件は、前記繊維シートの連続が3層以下となる条件であり、
前記配向角度の差に関する条件は、配向角度の差が45°以下となる条件である請求項6に記載の学習装置の学習方法。 - 前記探索モデルで用いられる前記積層パターンにおける積層数は、前記積層体の積層数よりも少ない積層数となっている請求項1から7のいずれか1項に記載の学習装置の学習方法。
- 請求項1から8のいずれか1項に記載の学習装置の学習方法により学習した前記探索モデルを用いて、前記制約条件を満足する前記積層体の積層パターンである設計パターンを、設計装置を用いて設計する設計パターンの設計方法であって、
前記設計装置に、
所定のアルゴリズムにより前記積層体の候補となる前記積層パターンである候補パターンを導出するステップと、
前記積層体の前記候補パターンを前記探索モデルに入力して、前記制約条件を満足する前記積層パターンである設計パターンを導出するステップと、を実行させる設計パターンの設計方法。 - 前記積層体の前記設計パターンの積層数が、前記探索モデルに用いられる前記積層パターンにおける積層数よりも多い積層数である場合、
前記積層体の前記候補パターンを導出するステップの実行後、導出された前記積層体の前記候補パターンのうち、前記制約条件を満たしていない前記積層パターンを抽出パターンとして抽出するステップを実行し、
前記制約条件を満足する前記設計パターンを導出するステップでは、前記抽出パターンを前記探索モデルに入力する請求項9に記載の設計パターンの設計方法。 - 前記積層体の積層数が、前記探索モデルに用いられる前記積層パターンにおける積層数よりも多い積層数である場合、
前記制約条件を満足する前記設計パターンを導出するステップでは、前記積層体の前記候補パターンを覆うように、複数の前記積層パターンを並べて設定すると共に、並べた複数の前記積層パターンの一部が重複するように設定する請求項9に記載の設計パターンの設計方法。 - 前記制約条件を満足する前記設計パターンを導出するステップは、
前記探索モデルによる前記積層パターンの探索時において、隣接する前記繊維シートの層同士を入れ替えて、探索を実行する請求項9から11のいずれか1項に記載の設計パターンの設計方法。 - 請求項9から12のいずれか1項に記載の設計パターンの設計方法により設計された前記設計パターンに基づいて、前記繊維シートを積層するステップと、
積層した前記繊維シートを一体化して前記積層体を形成するステップと、を実行する積層体の製造方法。 - 請求項1から8のいずれか1項に記載の学習装置の学習方法により学習した前記探索モデルを用いて、前記制約条件を満足する前記積層体の積層パターンである設計パターンを設計する設計パターンの設計装置であって、
所定のアルゴリズムにより前記積層体の候補となる前記積層パターンである候補パターンを導出するステップと、
前記積層体の前記候補パターンを前記探索モデルに入力して、前記制約条件を満足する前記積層パターンである設計パターンを導出するステップと、を実行する制御部を備える設計パターンの設計装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US18/272,937 US20240083136A1 (en) | 2021-01-20 | 2022-01-18 | Training method for learning device, method for designing design pattern, method for manufacturing laminate, and design device for design pattern |
| EP22742568.3A EP4265417A4 (en) | 2021-01-20 | 2022-01-18 | TRAINING METHOD FOR LEARNING DEVICE, METHOD FOR DESIGNING A DESIGN PATTERN, METHOD FOR PRODUCING A LAMINATE AND DESIGN DEVICE FOR A DESIGN PATTERN |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021007444A JP7695792B2 (ja) | 2021-01-20 | 2021-01-20 | 学習装置の学習方法、設計パターンの設計方法及び積層体の製造方法 |
| JP2021-007444 | 2021-01-20 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2022158446A1 true WO2022158446A1 (ja) | 2022-07-28 |
Family
ID=82549416
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2022/001599 Ceased WO2022158446A1 (ja) | 2021-01-20 | 2022-01-18 | 学習装置の学習方法、設計パターンの設計方法、積層体の製造方法及び設計パターンの設計装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20240083136A1 (ja) |
| EP (1) | EP4265417A4 (ja) |
| JP (1) | JP7695792B2 (ja) |
| WO (1) | WO2022158446A1 (ja) |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0325306B2 (ja) | 1985-06-29 | 1991-04-05 | Masaki Kawashima | |
| US20150170022A1 (en) * | 2013-12-13 | 2015-06-18 | King Fahd University Of Petroleum And Minerals | Method and apparatus for characterizing composite materials using an artificial neural network |
| JP2018156689A (ja) * | 2015-08-11 | 2018-10-04 | サビック グローバル テクノロジーズ ビー.ブイ. | 低い単位面積重量を有する多重プライ積層複合材 |
| US20190315076A1 (en) * | 2018-04-11 | 2019-10-17 | Bell Helicopter Textron Inc. | Automated placement of composite material |
| JP6625306B1 (ja) * | 2019-04-22 | 2019-12-25 | 三菱電機株式会社 | 複合材料積層構造体の設計方法、複合材料積層構造体の製造方法、及び複合材料積層構造体の設計装置 |
| JP2019219741A (ja) * | 2018-06-15 | 2019-12-26 | 株式会社日立製作所 | 学習制御方法及び計算機システム |
| US20200279152A1 (en) * | 2019-03-01 | 2020-09-03 | International Business Machines Corporation | Lexicographic deep reinforcement learning using state constraints and conditional policies |
| JP2020144484A (ja) * | 2019-03-04 | 2020-09-10 | 富士通株式会社 | 強化学習方法、強化学習プログラム、および強化学習システム |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6890431B2 (ja) * | 2016-02-08 | 2021-06-18 | ザ・ボーイング・カンパニーThe Boeing Company | 多層複合部品のためのプライ最適化実行可能性分析 |
-
2021
- 2021-01-20 JP JP2021007444A patent/JP7695792B2/ja active Active
-
2022
- 2022-01-18 US US18/272,937 patent/US20240083136A1/en active Pending
- 2022-01-18 EP EP22742568.3A patent/EP4265417A4/en active Pending
- 2022-01-18 WO PCT/JP2022/001599 patent/WO2022158446A1/ja not_active Ceased
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0325306B2 (ja) | 1985-06-29 | 1991-04-05 | Masaki Kawashima | |
| US20150170022A1 (en) * | 2013-12-13 | 2015-06-18 | King Fahd University Of Petroleum And Minerals | Method and apparatus for characterizing composite materials using an artificial neural network |
| JP2018156689A (ja) * | 2015-08-11 | 2018-10-04 | サビック グローバル テクノロジーズ ビー.ブイ. | 低い単位面積重量を有する多重プライ積層複合材 |
| US20190315076A1 (en) * | 2018-04-11 | 2019-10-17 | Bell Helicopter Textron Inc. | Automated placement of composite material |
| JP2019219741A (ja) * | 2018-06-15 | 2019-12-26 | 株式会社日立製作所 | 学習制御方法及び計算機システム |
| US20200279152A1 (en) * | 2019-03-01 | 2020-09-03 | International Business Machines Corporation | Lexicographic deep reinforcement learning using state constraints and conditional policies |
| JP2020144484A (ja) * | 2019-03-04 | 2020-09-10 | 富士通株式会社 | 強化学習方法、強化学習プログラム、および強化学習システム |
| JP6625306B1 (ja) * | 2019-04-22 | 2019-12-25 | 三菱電機株式会社 | 複合材料積層構造体の設計方法、複合材料積層構造体の製造方法、及び複合材料積層構造体の設計装置 |
Non-Patent Citations (4)
| Title |
|---|
| HIKIDA, SATOSHI: "Experiments on Combinatorial Optimization with Reinforcement Learning Using Deep Learning and Monte Carlo Tree Search and a Consideration of Frame Problem", JSAI TECHNICAL REPORT, no. SIG-AGI-009-007, 1 January 2018 (2018-01-01), pages 1 - 7, XP009538426, DOI: 10.11517/jsaisigtwo.2018.AGI-009_07 * |
| MARUYAMA, MOTOKI; ENDO, SATOSHI; YAMADA, KOJI; TOMA, NARUAKI; AKAMINE, YUHEI: "F-003 A Study of Model-Based Deep Reinforcement Learning Using GAN", PROCEEDINGS OF 18TH FORUM ON INFORMATION TECHNOLOGY (FIT2019); SEPTEMBER 3-5, 2019, vol. 18, no. 2, 1 January 2019 (2019-01-01) - 5 September 2019 (2019-09-05), pages 259 - 260, XP009538343 * |
| NARITA, MINORU; KIMURA, DAIKI: "Deep reinforcement method that introduces the degree of failure", THE 37TH ANNUAL CONFERENCE OF THE ROBOTICS SOCIETY OF JAPAN; SEPTEMBER 3-7, 2019, ROBOTICS SOCIETY OF JAPAN, JP, vol. 37, 3 September 2019 (2019-09-03) - 7 September 2019 (2019-09-07), JP, pages 1 - 2, XP009538428 * |
| See also references of EP4265417A4 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20240083136A1 (en) | 2024-03-14 |
| EP4265417A1 (en) | 2023-10-25 |
| JP7695792B2 (ja) | 2025-06-19 |
| EP4265417A4 (en) | 2024-07-03 |
| JP2022111784A (ja) | 2022-08-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN109870903B (zh) | 参数优化方法、装置以及非瞬时计算机可读取介质 | |
| JP6356339B2 (ja) | 低い単位面積重量を有する多重プライ積層複合材 | |
| US10140388B1 (en) | System and method for designing composite laminates using lamination parameters | |
| JP5972062B2 (ja) | 複合材積層板の屈曲繊維経路の設計 | |
| Fischetti et al. | Proximity search for 0-1 mixed-integer convex programming | |
| US10183449B2 (en) | Lamination parameter-based method for optimal design and manufacturing options | |
| Liang et al. | An improved artificial bee colony algorithm for solving constrained optimization problems | |
| WO2020213339A1 (ja) | 遺伝的アルゴリズムを用いた複合材設計装置、複合材設計方法、及び複合材設計プログラム | |
| Zeng et al. | A simulated annealing approach for optimizing composite structures blended with multiple stacking sequence tables: J. Zeng et al. | |
| RU2020120108A (ru) | Система управления короблением композитных конструкций | |
| US9811616B2 (en) | Analysis of a structure modeled with intraply interface elements | |
| WO2022158446A1 (ja) | 学習装置の学習方法、設計パターンの設計方法、積層体の製造方法及び設計パターンの設計装置 | |
| CN120161799A (zh) | 一种考虑动态扰动的加工、装配联合的生产车间调度优化方法 | |
| CN119579269A (zh) | 一种基于自监督学习的多模态鲁棒推荐方法及系统 | |
| Esmaeeli et al. | Simultaneous optimization of elastic constants of laminated composites using artificial bee colony algorithm | |
| Medeiros et al. | Population-based iterated local search for batch scheduling on parallel machines with incompatible job families, release dates, and tardiness penalties | |
| US10402512B2 (en) | Systems and methods for mathematical regression with inexact feedback | |
| Ahandani et al. | Hybridizing local search algorithms for global optimization | |
| Ferretti et al. | Stress-Based lattice structure design for a motorbike application | |
| CA2948103A1 (en) | A method and system for quantifying the impact of features on composite components | |
| JP5900341B2 (ja) | 構成管理装置、構成管理方法、及び構成管理プログラム | |
| JP4519996B2 (ja) | 繊維強化プラスチック製パイプの設計支援方法 | |
| Xie et al. | Selection of optimal cloud services based on quality of service ontology | |
| Schaub | What are Neural Networks made of? | |
| Vicente | Stacking sequence retrieval of large com-posite structures in bi-step optimization strategies using mechanical constraints |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 22742568 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 18272937 Country of ref document: US |
|
| ENP | Entry into the national phase |
Ref document number: 2022742568 Country of ref document: EP Effective date: 20230717 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |