WO2023112100A1 - Système d'expédition de véhicule, procédé d'expédition de véhicule et serveur de commande - Google Patents
Système d'expédition de véhicule, procédé d'expédition de véhicule et serveur de commande Download PDFInfo
- Publication number
- WO2023112100A1 WO2023112100A1 PCT/JP2021/045886 JP2021045886W WO2023112100A1 WO 2023112100 A1 WO2023112100 A1 WO 2023112100A1 JP 2021045886 W JP2021045886 W JP 2021045886W WO 2023112100 A1 WO2023112100 A1 WO 2023112100A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- vehicle
- evaluation value
- evaluation
- value
- vehicles
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images






Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/123—Traffic control systems for road vehicles indicating the position of vehicles, e.g. scheduled vehicles; Managing passenger vehicles circulating according to a fixed timetable, e.g. buses, trains, trams
Definitions
- the present invention relates to a vehicle dispatch system.
- the object of the present invention is to realize optimal vehicle allocation according to the intention of use specified by the system user for groups of vehicles having different travel indices.
- the present invention provides a vehicle allocation system including a plurality of vehicles of a plurality of vehicle types, a control server having a processor and a memory for allocating the vehicles, and a user terminal connected to the control server.
- the control server includes an evaluation value acquisition unit that acquires an evaluation value for each evaluation index set in advance for each vehicle type when the plurality of vehicles travel along a preset travel route; It has a user cooperation unit that receives the degree of importance of the index from the user terminal, and a vehicle allocation planning unit that selects a vehicle to be allocated based on a value obtained by multiplying each evaluation value corresponding to the evaluation index by the degree of importance.
- a unified evaluation index that takes into account the tastes of different evaluation indexes depending on the system user is given, and the most suitable vehicle for the preference of the system user is dispatched. I can make a plan.
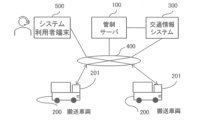
- FIG. 1 is a diagram showing an example of the configuration of a remote control system including a vehicle allocation system according to Embodiment 1 of the present invention.
- the remote control system shown in FIG. 1 includes a control server 100, a plurality of vehicles 200 including engine vehicles, EVs (Electric Vehicles), hydrogen fuel vehicles, etc., a traffic information system 300, and a system user terminal 500.
- Each vehicle 200 is equipped with an in-vehicle device 201 .
- the control server 100 is an information device (computer) that controls each vehicle 200 by remote control, and is implemented using a server installed in a predetermined facility such as a control center, for example.
- the control server 100 communicates with an in-vehicle device 201 mounted on each vehicle 200 via a communication line 400 realized by the Internet, a mobile phone network, a wireless LAN, or the like. Run instructions (or vehicle allocation instructions) are given.
- the driving instructions include driving environment information such as the dispatch destination (transportation start point, transportation end point) and route.
- the control server 100 also communicates with the traffic information system 300 and the system user terminal 500 via the communication line 400 .
- a plurality of vehicles 200 carry out transportation work from a specified transportation start point to a transportation end point in accordance with remote control travel instructions from the control server 100 .
- the in-vehicle device 201 controls the speed and steering angle of the vehicle 200 for traveling along the specified route based on the task information transmitted from the control server 100 via the communication line 400 .
- each vehicle 200 may have a different drive source such as fossil fuel, hydrogen fuel, or electric power. Other drive sources may be used instead of these drive sources.
- the traffic information system 300 detects information (traffic information) related to the driving environment such as obstacles and traffic jams that hinder the vehicle's travel within the area including the travel route of the vehicle 200, and notifies the control server 100 and the vehicle 200 of the information.
- the control server 100 superimposes the notified information on the map information stored in the server, and changes the dispatch route if there is an obstacle on the travel route.
- a sensor that implements the traffic information system 300 for example, a camera, radar, sonar, LiDAR, etc. can be used.
- a user of the dispatch system provided by the control server 100 can issue a request for operation of the vehicle 200 via the system user terminal 500 and the control server 100 .
- the request for operation can include the intention of vehicle allocation (influence on the environment). Examples of the intention to allocate a vehicle include a constraint value set for the vehicle 200 by the system user terminal 500 and a preference for a vehicle to be used for vehicle allocation.
- the system user previously inputs the transport start position (transport source) and transport end position (transport destination) to the control server 100 using the system user terminal 500, and the route generation unit 150 determines the travel route in advance.
- An example of calculating candidates and storing them in the route information 151 is shown.
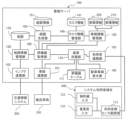
- FIG. 2 is a functional block diagram of the control server 100 according to Embodiment 1 of the present invention.
- the control server 100 includes a vehicle cooperation unit 101, an infrastructure cooperation unit 102, a user cooperation unit 103, a map 110, a map information management unit 120, a vehicle information management unit 130, vehicle type information 210, and vehicle information 220. , task information management unit 140 , task information 141 , route generation unit 150 , route information 151 , evaluation value acquisition unit 160 , vehicle allocation planning unit 170 , evaluation value table 171 , and vehicle allocation display unit 180 .
- the vehicle cooperation unit 101 includes a function to cooperate with the control server 100 and the vehicle 200, and can notify the vehicle 200 scheduled to be dispatched of the task information 141 from the control server 100. The state of the vehicle 200 can also be notified.
- the infrastructure linking unit 102 includes a function of linking the control server 100 and the traffic information system 300. By this function, the traffic environment information (traffic information) including obstacle information on the road detected by the traffic information system 300 is sent to the control server. 100 can be notified.
- the user linking unit 103 includes a function of linking the control server 100 and the system user terminal 500 used by the system user.
- the system user can be presented with the notification and the allocation result of the vehicle 200 determined by the control server 100 .
- the user-side center cooperation unit 113 of the system user terminal 500 includes a function to cooperate with the system user and the control server 100, and notifies the control server 100 of the information input by the system user by this function; A dispatch result of the vehicle 200 can be received from the control server 100 .
- the constraint value input unit 123 of the system user terminal 500 can input constraint values for vehicle allocation set by the system user.
- a constraint value is a constraint condition related to vehicle allocation set by a system user, and an example of a constraint value is a threshold for transportation time (maximum value of transportation time or travel time).
- the control server 100 When selecting vehicles 200 to be dispatched, the control server 100 excludes vehicles 200 exceeding (or falling below) a threshold set as a constraint value from candidates for dispatch.
- a threshold set as a constraint value from candidates for dispatch.
- the constraint values given above are only examples, and the constraint values can be set from other data held by the control server 100 . Note that the constraint value can be set for each evaluation value corresponding to the evaluation index.
- the importance input unit 133 of the system user terminal 500 can set and input the importance that the system user has for the evaluation index.
- the degree of importance is a relative value set by the system user on the system user terminal 500 regarding the environmental performance and driving performance of the vehicle 200 that the vehicle 200 wishes to dispatch.
- the importance of environmental performance and driving performance can be expressed in five levels: “Very important”, “Important”, “Normal”, “Not important”, and “Not important at all”.
- the system user selects the level of importance via a GUI (Graphical User Interface), and the level of importance input unit 133 accepts it.
- GUI Graphic User Interface
- the importance level can be set for each evaluation index that indicates the system user's preferences and intentions for vehicle allocation.
- the degree of importance can be set for each evaluation index relating to environmental performance, such as fossil fuel consumption, power consumption, and CO2 emissions.
- an evaluation index related to the running performance requested by the system user for example, running time (or transportation time) can be used.
- the evaluation index can be appropriately set according to the characteristics of the vehicle type of the vehicle 200, and the evaluation index regarding the environmental performance and the running performance can be set according to the driving source, the energy source, the application of the vehicle 200, and the like.
- an integer from "5" to "1" preset for the importance of each item such as environmental performance and driving performance of the vehicle type information 210 is set as a value of importance for each evaluation index ( It can be used as a weight wi) and used to calculate an evaluation value for each evaluation index. Further, the importance is not limited to the five stages described above, and can be appropriately set by an administrator or the like of the dispatch system.
- evaluation values corresponding to evaluation indexes are examples of using non-dimensional values obtained by normalizing each evaluation value.
- the map 110 stores link and node information representing the roads within the driving area managed by the control server 100, and information indicating the driving environment on the roads, such as road gradients.
- the map information management unit 120 has a function of superimposing the traffic information from the traffic information system 300 acquired via the infrastructure cooperation unit 102 on the map 110 and a function of providing information on the map 110 to the evaluation value acquisition unit 160 .
- the vehicle information management unit 130 stores vehicle type information 210 including the weight of the vehicle 200, vehicle size, type of drive source, etc., and vehicle information 220 including dynamically changeable values such as the coordinates of the vehicle 200 and task assignment status. and has a function of providing information on the vehicle 200 to other functional blocks.
- the task information management unit 140 has a function of managing task information 141 assigned to the vehicle 200 and providing task information to other functional blocks.
- the task information 141 includes, for example, the name of the item to be transported, the characteristics of the item such as fragile items, the coordinates of the transport source and the transport destination, and the like.
- the route generation unit 150 has a function of generating candidates for the travel route of the vehicle 200 from the map 110 and the task information management unit 140, linking them with the task information 141 to generate travel route information, and storing the information in the route information 151. .
- the evaluation value acquisition unit 160 acquires the map information (110) of the travel route acquired from the map information management unit 120, the vehicle type information 210 and the vehicle information 220 acquired from the vehicle information management unit 130, and the task information management unit 140.
- evaluation indicators include travel time from the source to the destination, consumed fuel and electricity, and carbon dioxide (CO2) emissions.
- the evaluation value acquisition unit 160 can extend the types of evaluation indexes and apply them to the evaluation value acquisition unit 160 by extending the module that acquires the information necessary for calculating the evaluation value.
- the vehicle allocation planning unit 170 has a function of normalizing the evaluation values calculated by the evaluation value acquisition unit 160 by a non-dimensional method such as normalization, and a system utilization input input by the importance input unit 133. By multiplying the weight (importance) to the evaluation index set by the system user, it has the function of selecting the optimal dispatched vehicle according to the preference of the system user and outputting the dispatch result (dispatching plan).
- the vehicle allocation planning unit 170 further has a function of storing the correspondence relationship between the evaluation value calculated by the evaluation value acquisition unit 160 and the vehicle 200 in the evaluation value table 171 .
- the vehicle allocation display unit 180 has a function of displaying (or outputting) the vehicle allocation results calculated by the vehicle allocation planning unit 170 .
- FIG. 7 is a diagram showing an example of a vehicle allocation plan presentation screen.
- a screen 600 in FIG. 7 is an example of a screen on which a vehicle allocation result output by the vehicle allocation display unit 180 is drawn.
- the screen 600 is displayed on the output device 26 of the control server 100 or the output device of the system user terminal 500 .
- the screen 600 includes a travel route display area D340, a vehicle-evaluation value correspondence table D330, a task table D350, an importance input area D310, and a constraint value input area 320.
- the start point and end point of the travel route calculated by the vehicle allocation planning unit 170 and its route are drawn.
- the dispatched vehicle display unit 180 acquires obstacle information in the driving environment acquired from the map information management unit 120 and road occupancy status from the task information 141 acquired from the task information management unit 140, thereby Impossible roads can also be represented.
- the vehicle-evaluation value correspondence table D330 is an example of a screen that displays evaluation values acquired by the evaluation value acquiring unit 160 and the vehicle allocation planning unit 170 in association with candidate vehicles to be allocated.
- the vehicle-evaluation value correspondence table D330 enables screen output by the dispatched vehicle display unit 180 acquiring data from the evaluation value table 171.
- the dispatched vehicle display unit 180 acquires information on tasks assigned to the vehicle 200 from the task information management unit 140, and displays the contents of the tasks.
- evaluation index importance input area D310 the importance of each evaluation index input by the system user is displayed.
- a constraint value input by the system user is displayed in the constraint value input area D320.
- the screen 600 When inputting the constraint values, the screen 600 is presented on the system user terminal 500, and the importance of the evaluation index is entered in the importance input area D310 and the constraint value input area D320. It is also possible to execute In particular, in the constraint value input area D320, the system user can select data stored in the control server 100 (for example, the evaluation value table 171) and enter a constraint value for the selected data.
- the control server 100 for example, the evaluation value table 171
- the control server 100 is composed of a computer including a processor 21, a memory 22, a storage device 23, a network interface 24, an input device 25 and an output device 26, as shown in FIG.
- the memory 22 stores a vehicle cooperation unit 101, an infrastructure cooperation unit 102, a user cooperation unit 103, a map 110, a map information management unit 120, a vehicle information management unit 130, a task information management unit 140, a route generation unit 150, an evaluation value
- a vehicle cooperation unit 101 an infrastructure cooperation unit 102, a user cooperation unit 103, a map 110, a map information management unit 120, a vehicle information management unit 130, a task information management unit 140, a route generation unit 150, an evaluation value
- Each functional unit of the acquisition unit 160, the vehicle allocation planning unit 170, and the vehicle allocation display unit 180 is stored as a program.
- the processor 21 operates as a functional unit that provides a predetermined function by processing according to the program of each functional unit.
- the processor 21 functions as the vehicle allocation planning unit 170 by processing according to the vehicle allocation planning program. The same is true for other programs.
- the processor 21 also operates as a functional unit that provides functions of multiple processes executed by each program.
- Computers and computer systems are devices and systems that include these functional units.
- the storage device 23 stores vehicle type information 210, vehicle information 220, task information 141, route information 151, an evaluation value table 171, a map 110, importance information (D310), and constraint value information (D320). , the vehicle-evaluation value correspondence information (D330) is stored.
- the network interface 24 is connected to the communication line 400 and communicates with the vehicle 200 , the system user terminal 500 and the traffic information system 300 .
- the input device 25 is composed of a keyboard, a mouse, a touch panel, or the like.
- the output device 26 is composed of a display, a speaker, and the like.
- the system user terminal 500 is composed of a computer similar to the control server 100, and has a processor, memory, storage device, network interface, input device and output device.
- the user-side center cooperation unit 113, the constraint value input unit 123, and the importance input unit 133 are stored in the memory as programs and executed by the processor.
- 3A to 3E describe the details of the database stored in the storage device 23 of the control server 100.
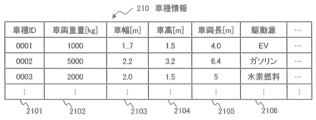
- FIGS. 3A and 3B show vehicle type information 210 and vehicle information 220 managed by the vehicle information management unit 130.
- FIG. FIG. 3A is a diagram showing an example of vehicle type information 210. As shown in FIG.
- the vehicle type information 210 stores data representing characteristics of the vehicle 200 for each vehicle type. , vehicle length 2105, drive source 2106, and the like.
- FIG. 3B is a diagram showing an example of the vehicle information 220.
- the vehicle information 220 has a relationship with the vehicle type information 210 described above.
- a vehicle ID 2201 is assigned to each of the multiple vehicles 200 managed by the control server 100.
- FIG. The vehicle information 220 stores, as information for each vehicle 200, vehicle ID 2201, vehicle type ID 2202, task allocation status 2203, vehicle coordinates 2204, air conditioning status 2205, and the like.
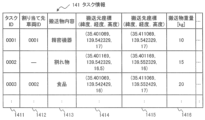
- FIG. 3C is a diagram showing an example of the task information 141.
- the task information 141 describes information on tasks (vehicle allocation plans) to be allocated to the vehicles 200 .
- Examples of information stored in the task information 141 include a task ID 1411, an allocation destination vehicle ID 1412, a transported item content 1413, a transported source coordinate 1414, a transported destination coordinate 1415, a transported item weight 1416, and the like.
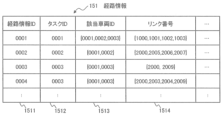
- FIG. 3D is a diagram showing an example of route information 151 on which the vehicle 200 can travel.
- the route information 151 stores a route information ID 1511 describing a travel route for executing a certain task ID 1512, a corresponding vehicle ID 1513 traveling on the travel route, and a link number 1514 for describing the travel route.
- the link number 1514 can include location information such as identifiers of nodes on the map 110 and identifiers of fault information.
- the obstacle information can include identifiers of obstacles, such as traffic jams and construction work, and the extent of the obstacles.
- FIG. 3E is a diagram showing an example of the evaluation value table 171.
- FIG. The evaluation value table 171 is a table that stores a correspondence table between the allocation candidate vehicles 200 and the evaluation values calculated by the vehicle allocation planning unit 170 .
- Examples of the attributes include an evaluation value ID 1711 for identifying an evaluation value, a task ID 1712 for designating a task, a vehicle ID 1713 as a vehicle allocation candidate for the task 1712, and a running time used as an evaluation index for defining the goodness of running. 1714, non-dimensionalized running time: non-dimensionalized 1715, fossil fuel consumption 1716, non-dimensionalized fossil fuel consumption: non-dimensionalized 1717, power consumption 1718 , non-dimensional power consumption 1719 obtained by rendering the power consumption 1718 dimensionless, and a total evaluation value 1720 for each evaluation value ID 1711 calculated by the dispatch planning unit 170 from the non-dimensional evaluation values are stored.
- FIGS. 3A to 3E are examples of data for carrying out the present invention, and do not limit the data stored in the control server 100.
- FIG. 3A to 3E are examples of data for carrying out the present invention, and do not limit the data stored in the control server 100.
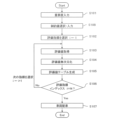
- FIG. 4 is a flow chart showing the flow of processing according to the first embodiment of the present invention.
- the illustrated flowchart shows an example of processing performed in the dispatch system.
- the control server 100 has pre-generated travel routes to be used for vehicle allocation, and the control server 100 generates a vehicle allocation plan for the vehicle 200 according to the preference of the system user.
- control server 100 sets the travel route of the vehicle 200 in order to perform the task managed by the task information management unit 140.
- step S101 the system user inputs the degree of importance for each preset evaluation index via the system user terminal 500.
- the system user inputs, for example, five levels of importance for the evaluation index via the importance input unit 133 of the system user terminal 500, thereby defining the vehicle type that meets the preferences of the system user. parameters can be set.
- the number i of the evaluation index is a value preset corresponding to the evaluation value table 171, as shown in FIG. 3E.
- step S103 when the control server 100 travels along the travel route set in step S100, the currently selected evaluation index evaluation values are obtained for all vehicles 200 that can be dispatched.
- a function or an evaluation value simulator for outputting the evaluation value by the evaluation value obtaining unit 160 may be used to obtain the evaluation value.
- the evaluation value may be obtained by the evaluation value acquisition unit 160 from the route generation unit 150 or the task information management unit 140 .
- the route generation unit 150 refers to the vehicle type information 210 and the vehicle information 220 to calculate the currently selected evaluation index (fossil fuel consumption, power consumption, CO2 emissions, travel time, etc.). ) can be calculated for each vehicle 200 .
- the evaluation value of the evaluation index number i and the type j of the vehicle 200 is represented by the following equation (1) as the evaluation value L i,j .
- x i,j is an indicator function indicating that the evaluation index of number i is applied to vehicle 200 of type j
- t is time
- Y order is dispatch request information including importance, etc.
- Z map is a map of vehicle 200. Information.
- step S104 the evaluation value acquisition unit 160 makes the evaluation value L i,j dimensionless. Since the evaluation values L i,j are expressed in different units such as fossil fuel consumption (L) and power consumption (Wh), it is difficult to compare different evaluation indexes as they are. Therefore, the vehicle allocation planning unit 170 makes the evaluation value L i,j of each evaluation index dimensionless, thereby realizing evaluation for different evaluation indexes.
- L fossil fuel consumption
- Wh power consumption
- the evaluation value L i,j is usually transformed into a value from 0 to 1 to be dimensionless.
- multiplication is performed, if the dimensionless evaluation value is 0, the value of 0 is returned even if the importance is multiplied, so the significance of weighting is lost.
- control server 100 of the present embodiment adds 1 to the normalized value to make the range from 1 to 2 dimensionless.
- the dimensionless evaluation value L i,j (norm) is expressed by the following equation (2).
- i is an index indicating an evaluation index
- j is an index indicating a candidate vehicle 200 for dispatch
- L i,j indicates an evaluation value of the j-th vehicle 200 with respect to the i-th evaluation index.
- the evaluation value L i (max) indicates the maximum value
- the evaluation value L i (min) indicates the evaluation index i
- L i,j (norm) indicates the dimensionless evaluation value of the j-th vehicle for the i-th evaluation index.
- step S105 the evaluation value acquisition unit 160 evaluates each vehicle 200 based on the evaluation value L i,j calculated in step S104, the dimensionless evaluation value L i,j (norm), and the total evaluation value J j .
- An evaluation value table 171 indicating values is generated.
- the evaluation value acquisition unit 160 generates a record in the evaluation value table 171 for each dispatchable vehicle 200 for each task ID 1712 and assigns the evaluation value ID 1711 to the record.
- the vehicle 200 that can be dispatched is a vehicle having the vehicle ID 2201 of the record in which the task allocation status 2203 of the vehicle information 220 is "None".
- step S106 if the evaluation value acquiring unit 160 has finished calculating the evaluation values L i,j for all the evaluation indexes i to N, the iteration of steps S103 to S105 is terminated. Return and calculate evaluation values for all evaluation indexes.
- step S107 the vehicle allocation planning unit 170 multiplies the dimensionless evaluation value L i,j (norm) by the degree of importance (weight wi) input by the system user in step S101, and calculates the total evaluation value J for each vehicle 200. j is stored in the evaluation value table 171 generated in step S105.
- the calculation of the total evaluation value J j is performed using the weight wi of the importance of each evaluation index (i) received in step S101 and the non-dimensional evaluation value L i,j (norm ), the evaluation value acquiring unit 160 calculates a total evaluation value J j that is the sum of dimensionless evaluation values for each vehicle 200 using the following equation (3).
- N indicates the total number of evaluation indices.
- the vehicle allocation planning unit 170 selects the vehicle 200 with the smallest total evaluation value Jj , which is a weighted evaluation value obtained by multiplying the evaluation value L i,j (norm) by the weight wi, as the vehicle 200 to be allocated. can be done.
- the total evaluation value Jj is the minimum as the condition for selecting the weighted evaluation value.
- the present invention is not limited to this. can be changed.
- the control server 100 of the present embodiment can allocate the optimal vehicle 200 based on the dimensionless value for the vehicles 200 with different evaluation indices of interest. Further, the control server 100 can dispatch the vehicle 200 considering the preference of the system user by adjusting the weight wi of the evaluation index.
- the environmental load CO2 emissions, fuel consumption, electric power consumption
- the environmental load CO2 emissions, fuel consumption, electric power consumption
- control server 100 calculates an evaluation value for each evaluation index when the vehicle 200 that can be dispatched travels along a pre-generated travel route, and makes the evaluation value dimensionless so that the unit of the evaluation value differs. It is possible to compare the environmental performance (energy consumption and CO2 emissions) between vehicle models.
- control server 100 can compare the vehicles 200 in the form of use intended by the system user with the total evaluation value obtained by multiplying the dimensionless evaluation value by the degree of importance (weight).
- a vehicle 200 that reflects the intention and whose total evaluation value satisfies a predetermined condition can be determined as a dispatch target.
- a process of selecting and inputting a constraint value is added to the process shown in FIG. 4 of the first embodiment.
- Vehicles 200 are selected and a vehicle allocation plan is generated.
- FIG. 5 is a flowchart showing an example of processing performed in the second embodiment. Other configurations are the same as those of the first embodiment. Below, the part changed from Example 1 is demonstrated.
- step S108 in the flow chart of FIG. 5 expressing this embodiment a constraint value for the evaluation value Li ,j is input from the system user terminal 500 via the constraint value input unit 123.
- the constraint value input from the system user terminal 500 is not limited to the evaluation value, and may be selected from the data items stored in the control server 100, such as when only EVs are to be candidates for vehicle allocation.
- This embodiment optimizes a plurality of travel routes set in step S100 of FIG. 4 in the first embodiment based on the evaluation values Li ,j .
- FIG. 6 is a flowchart showing an example of processing performed in the third embodiment. Other configurations are the same as those of the first embodiment.
- step S102A in the flow chart of FIG. 6 expressing this embodiment one is selected from the set of evaluation indices and the set of route candidates.
- a set of route candidates is the route information 151 generated by the route generation unit 150 and is data in which a plurality of route information IDs 1511 are set for one task ID 1512 .
- step S109 of FIG. 6 in addition to optimizing the vehicle 200 to be allocated as described in the first embodiment, iterative calculation is performed to evaluate the travel route of the vehicle 200 to be allocated.
- the evaluation value acquisition unit 160 sequentially selects the travel route (route information ID 1511) from the route information 151 generated by the route generation unit 150, with the total number of route candidates as a set of M travel route candidates, and stores the evaluation value table. 171 evaluation values are acquired.
- the evaluation value acquiring unit 160 and the vehicle allocation planning unit 170 calculate the total evaluation value Jj for the plurality of route information IDs 1511, and calculate the combination of the route information ID 1511 and the vehicle 200 that minimizes the total evaluation value Jj as the optimum vehicle allocation target. .
- the vehicle allocation system of the above embodiment can be configured as follows.
- a control server (100) having a plurality of vehicles (200) composed of a plurality of vehicle types (vehicle type information 210) and a processor (21) and a memory (22) for allocating the vehicles (200) and a user terminal (500) connected to the control server, wherein the control server (100) causes the plurality of vehicles (200) to travel along preset travel routes.
- an evaluation value acquisition unit (160) that acquires an evaluation value (L) for each evaluation index (i) that is set in advance when an evaluation index (i) is set;
- User cooperation unit (103) received from 500) selects a vehicle (200) to be allocated based on the value obtained by multiplying the evaluation value (L) corresponding to the evaluation index (i) by the importance (wi).
- a vehicle allocation planning unit (170) a vehicle allocation planning unit (170).
- control server 100 provides a unified evaluation index that takes into account the tastes of different evaluation indices depending on the system user, to the vehicles 200 having different evaluation indices, and optimizes the system user's preference.
- a vehicle allocation plan can be formulated.
- the evaluation value acquisition unit (160) obtains a total evaluation value by multiplying each evaluation value (L) by a value of importance (wi). (J), and selects a vehicle (200) for which the total evaluation value (J) satisfies a predetermined condition as a vehicle allocation target.
- the evaluation value acquisition unit (160) uses the maximum value and the minimum value of the evaluation value (L) for the evaluation index (i) to obtain the evaluation value A dispatch system characterized by normalizing (L norm ).
- the user cooperation unit (103) receives a constraint value for the evaluation value (L) from the user terminal (500), and A vehicle allocation system, wherein an acquisition unit (160) excludes a vehicle (200) having the evaluation value (L) that does not satisfy the constraint value from vehicles to be allocated.
- the preset travel route includes a plurality of travel routes
- the evaluation value acquisition unit (160) obtains a The sum of the values multiplied by the importance (wi) values is calculated as the total evaluation value (J) for each travel route, and the vehicle (200) for which the total evaluation value (J) satisfies a predetermined condition is selected as a dispatch target.
- a dispatch system characterized by:
- the optimum travel route and vehicle 200 can be selected by comparing the total evaluation value for each travel route.
- the environmental performance and driving performance of the vehicle 200 with different characteristics can be obtained. can be compared.
- the present invention is not limited to the above-described embodiments, and includes various modifications.
- the above embodiments are described in detail for easy understanding of the present invention, and are not necessarily limited to include all the described configurations.
- addition, deletion, or replacement of other configurations for a part of the configuration of each embodiment can be applied singly or in combination.
- each of the above configurations, functions, processing units, processing means, etc. may be implemented in hardware, for example, by designing a part or all of them in an integrated circuit. Further, each of the above configurations, functions, etc. may be realized by software by a processor interpreting and executing a program for realizing each function. Information such as programs, tables, and files that implement each function can be stored in a recording device such as a memory, a hard disk, an SSD (Solid State Drive), or a recording medium such as an IC card, SD card, or DVD.
- a recording device such as a memory, a hard disk, an SSD (Solid State Drive), or a recording medium such as an IC card, SD card, or DVD.
- control lines and information lines indicate what is considered necessary for explanation, and not all control lines and information lines are necessarily indicated on the product. In practice, it may be considered that almost all configurations are interconnected.
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Management, Administration, Business Operations System, And Electronic Commerce (AREA)
Abstract
Un système d'expédition de véhicule comprend une pluralité de véhicules d'une pluralité de types de véhicules, un serveur de commande qui comprend un processeur et une mémoire et expédie les véhicules, et un terminal utilisateur connecté au serveur de commande, le serveur de commande comprenant : une unité d'acquisition de valeur d'évaluation qui acquiert une valeur d'évaluation pour chaque indice d'évaluation prédéfini pour chaque type de véhicules lorsque la pluralité de véhicules est amenée à se déplacer le long d'un trajet de déplacement prédéfini ; une unité de coordination d'utilisateur qui reçoit un niveau d'importance pour chaque indice d'évaluation en provenance du terminal utilisateur ; et une unité de planification d'expédition de véhicule qui sélectionne un véhicule à expédier sur la base de la valeur d'évaluation pour chaque indice d'évaluation multiplié par le niveau d'importance.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2021/045886 WO2023112100A1 (fr) | 2021-12-13 | 2021-12-13 | Système d'expédition de véhicule, procédé d'expédition de véhicule et serveur de commande |
| JP2023567291A JP7706570B2 (ja) | 2021-12-13 | 2021-12-13 | 配車システム、配車方法及び管制サーバ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2021/045886 WO2023112100A1 (fr) | 2021-12-13 | 2021-12-13 | Système d'expédition de véhicule, procédé d'expédition de véhicule et serveur de commande |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2023112100A1 true WO2023112100A1 (fr) | 2023-06-22 |
Family
ID=86774043
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2021/045886 Ceased WO2023112100A1 (fr) | 2021-12-13 | 2021-12-13 | Système d'expédition de véhicule, procédé d'expédition de véhicule et serveur de commande |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP7706570B2 (fr) |
| WO (1) | WO2023112100A1 (fr) |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07319956A (ja) * | 1994-05-25 | 1995-12-08 | Nippon Telegr & Teleph Corp <Ntt> | 数値データの変動傾向抽出装置 |
| JP2013014387A (ja) * | 2011-06-30 | 2013-01-24 | Hitachi Information & Control Solutions Ltd | 配車計画評価学習システム |
| WO2014045359A1 (fr) * | 2012-09-20 | 2014-03-27 | トヨタ自動車株式会社 | Dispositif de gestion d'exploitation de véhicules à la demande, procédé de gestion d'exploitation de véhicules à la demande et système de gestion d'exploitation de véhicules à la demande |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8583367B2 (en) | 2011-01-07 | 2013-11-12 | Honda Motor Co., Ltd. | System and method for displaying a route based on a vehicle state |
-
2021
- 2021-12-13 WO PCT/JP2021/045886 patent/WO2023112100A1/fr not_active Ceased
- 2021-12-13 JP JP2023567291A patent/JP7706570B2/ja active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07319956A (ja) * | 1994-05-25 | 1995-12-08 | Nippon Telegr & Teleph Corp <Ntt> | 数値データの変動傾向抽出装置 |
| JP2013014387A (ja) * | 2011-06-30 | 2013-01-24 | Hitachi Information & Control Solutions Ltd | 配車計画評価学習システム |
| WO2014045359A1 (fr) * | 2012-09-20 | 2014-03-27 | トヨタ自動車株式会社 | Dispositif de gestion d'exploitation de véhicules à la demande, procédé de gestion d'exploitation de véhicules à la demande et système de gestion d'exploitation de véhicules à la demande |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2023112100A1 (fr) | 2023-06-22 |
| JP7706570B2 (ja) | 2025-07-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8886453B2 (en) | System and method for efficient routing on a network in the presence of multiple-edge restrictions and other constraints | |
| US8014914B2 (en) | Energy and emission responsive routing for vehicles | |
| US9785897B2 (en) | Methods and systems for optimizing efficiency of a workforce management system | |
| Li et al. | Modeling an enhanced ridesharing system with meet points and time windows | |
| US9395198B2 (en) | Dynamic routing via intelligent mapping system | |
| JP7099442B2 (ja) | プラン情報提供システム、プラン情報提供方法、およびプログラム | |
| WO2021174328A1 (fr) | Procédé et système d'optimisation de charge intelligente pour véhicules | |
| Liu et al. | Cognitive digital twins for freight parking management in last mile delivery under smart cities paradigm | |
| US20130339266A1 (en) | Vehicle fleet routing system | |
| CN115496449B (zh) | 仓储布局优化辅助决策方法及交互显示方法 | |
| CN114862209A (zh) | 运力调度方法、装置、电子设备及存储介质 | |
| CN112887406A (zh) | 终端、云端及其信息推送方法、电子设备及存储介质 | |
| CN112116419A (zh) | 网约车下单方法、装置、电子设备及存储介质 | |
| CN107085748A (zh) | 预测性车辆任务调度 | |
| AU2021364386A9 (en) | Machine learning for vehicle allocation | |
| Yıldız et al. | A reinforcement learning-based solution for the capacitated electric vehicle routing problem from the last-mile delivery perspective | |
| CN111178948B (zh) | 一种共享汽车动态借车实现方法 | |
| Bothos et al. | Recommending eco-friendly route plans | |
| WO2020185442A1 (fr) | Coordination de livraison de véhicule informatisée | |
| WO2023112100A1 (fr) | Système d'expédition de véhicule, procédé d'expédition de véhicule et serveur de commande | |
| CN117893333B (zh) | 基于历史驾驶数据的新能源车辆保险方法、介质和设备 | |
| CN119321774A (zh) | 基于多模态交互的导航路线规划方法及装置 | |
| CN109583677B (zh) | 行程信息发布方法、装置以及系统 | |
| CN114548881A (zh) | 货运订单匹配方法、系统、设备及存储介质 | |
| CN117223026A (zh) | 管理系统及管理方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 21968022 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2023567291 Country of ref document: JP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 21968022 Country of ref document: EP Kind code of ref document: A1 |