AT518489A3 - Fahrerassistenzsystem zum Unterstützen eines Fahrers beim Führen eines Fahrzeugs - Google Patents
Fahrerassistenzsystem zum Unterstützen eines Fahrers beim Führen eines Fahrzeugs Download PDFInfo
- Publication number
- AT518489A3 AT518489A3 ATA50248/2017A AT502482017A AT518489A3 AT 518489 A3 AT518489 A3 AT 518489A3 AT 502482017 A AT502482017 A AT 502482017A AT 518489 A3 AT518489 A3 AT 518489A3
- Authority
- AT
- Austria
- Prior art keywords
- publication
- assistance system
- driver assistance
- vehicle
- driving
- Prior art date
Links
Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/09626—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages where the origin of the information is within the own vehicle, e.g. a local storage device, digital map
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/0097—Predicting future conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/18—Conjoint control of vehicle sub-units of different type or different function including control of braking systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/20—Conjoint control of vehicle sub-units of different type or different function including control of steering systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/10—Path keeping
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/14—Adaptive cruise control
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/0967—Systems involving transmission of highway information, e.g. weather, speed limits
- G08G1/096708—Systems involving transmission of highway information, e.g. weather, speed limits where the received information might be used to generate an automatic action on the vehicle control
- G08G1/096725—Systems involving transmission of highway information, e.g. weather, speed limits where the received information might be used to generate an automatic action on the vehicle control where the received information generates an automatic action on the vehicle control
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/0967—Systems involving transmission of highway information, e.g. weather, speed limits
- G08G1/096766—Systems involving transmission of highway information, e.g. weather, speed limits where the system is characterised by the origin of the information transmission
- G08G1/096775—Systems involving transmission of highway information, e.g. weather, speed limits where the system is characterised by the origin of the information transmission where the origin of the information is a central station
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/30—Driving style
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2552/00—Input parameters relating to infrastructure
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2552/00—Input parameters relating to infrastructure
- B60W2552/20—Road profile, i.e. the change in elevation or curvature of a plurality of continuous road segments
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/40—Dynamic objects, e.g. animals, windblown objects
- B60W2554/406—Traffic density
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2555/00—Input parameters relating to exterior conditions, not covered by groups B60W2552/00, B60W2554/00
- B60W2555/20—Ambient conditions, e.g. wind or rain
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Automation & Control Theory (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Human Computer Interaction (AREA)
- Life Sciences & Earth Sciences (AREA)
- Atmospheric Sciences (AREA)
- Multimedia (AREA)
- Theoretical Computer Science (AREA)
- Traffic Control Systems (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
Abstract
Die Erfindung betrifft ein Fahrerassistenzsystem zum Unterstützen eines Fahrers beim Führen eines Fahrzeugs, wobei das Fahrerassistenzsystem vorzugsweise wenigstens einen Sensor aufweist, welcher eingerichtet ist, eine Fahrsituation eines Fahrzeugs wenigstens teilweise zu erfassen und wenigstens eine erste Datenschnittstelle zum Einlesen von Verkehrsdaten einer vorausliegenden Strecke. Weiterhin umfasst das Fahrerassistenzsystem vorzugsweise wenigstens eine zweite Datenschnittstelle zum Einlesen von Fahrbahndaten, insbesondere Topographie und/oder Fahrbahnverlauf eines vorausliegenden Fahrbahnabschnitts und/oder eines zurückliegenden Fahrbahnabschnitts. Ein Vorhersagemodul des Fahrerassistenzsystems ist vorzugsweise eingerichtet, um auf der Grundlage der momentanen Fahrsituation, den Verkehrsdaten und den Fahrbahndaten wenigstens ein zukünftiges Fahrszenario dynamisch zu simulieren und wiederum auf der Grundlage des wenigstens einen zukünftigen Fahrszenarios mögliche Trajektorien des Fahrzeugs dynamisch zu simulieren und auszugeben. Ein Optimierungsmodul des Fahrerassistenzsystems ist vorzugsweise eingerichtet, um anhand von wenigstens einer vorbestimmten Randbedingung, welche ein Fahrstilattribut des Fahrerassistenzsystem charakterisiert, eine der möglichen Trajektorien auszuwählen und auszugeben und ein Steuermodul ist vorzugsweise mit dem Längssystem, dem Bremssystem und/oder dem Antriebssystem des Fahrzeugs in der Weise verbunden, um das Fahrzeug auf der Grundlage der ausgewählten Trajektorie zu führen.
Description
indung betrifft ein Fahrerassistenzsystem zum Unterstützen eines Fahrers beim Führen eines Fahrzeugs, wobei das Fahrerassistenzsystem vorzugsweise wenigstens einen Sensor aufweist, welcher eingerichtet ist, eine Fahrsituation eines Fahrzeugs wenigstens teilweise zu erfassen und wenigstens eine erste Datenschnittstelle zum Einlesen von Verkehrsdaten einer vorausliegenden Strecke. Weiterhin umfasst das Fahrerassistenzsystem vorzugsweise wenigstens eine zweite Datenschnittstelle zum Einlesen von Fahrbahndaten, insbesondere Topographie und/oder Fahrbahnverlauf eines vorausliegenden Fahrbahnabschnitts und/oder eines zurückliegenden Fahrbahnabschnitts. Ein Vorhersagemodul des Fahrerassistenzsystems ist vorzugsweise eingerichtet, um auf der Grundlage der momentanen Fahrsituation, den Verkehrsdaten und den Fahrbahndaten wenigstens ein zukünftiges Fahrszenario dynamisch zu simulieren und wiederum auf der Grundlage des wenigstens einen zukünftigen Fahrszenarios mögliche Trajektorien des Fahrzeugs dynamisch zu simulieren und auszugeben. Ein Optimierungsmodul des
Fahrerassistenzsystems ist vorzugsweise eingerichtet, um anhand von wenigstens einer vorbestimmten Randbedingung, welche ein Fahrstilattribut des Fahrerassistenzsystem charakterisiert, eine der möglichen Trajektorien auszuwählen und auszugeben und ein Steuermodul ist vorzugsweise mit dem Längssystem, dem Bremssystem und/oder dem Antriebssystem des Fahrzeugs in der Weise verbunden, um das Fahrzeug auf der Grundlage der ausgewählten Trajektorie zu führen.
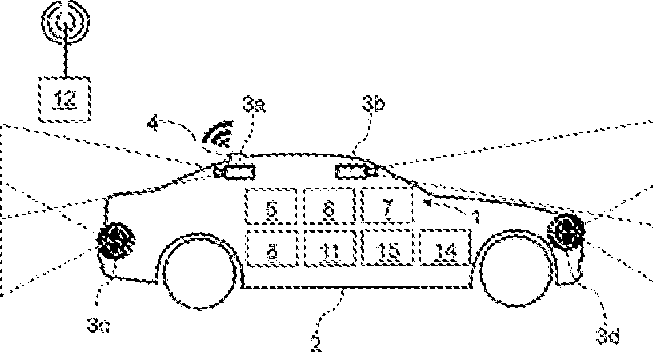
Fig.t
DVR 0078018
Recherchenbericht zu A 50248/2017

Klassifikation des Anmeldungsgegenstands gemäß IPC:
B60W 30/08 (2012.01); B60W 30/14 (2006.01)
Klassifikation des Anmeldungsgegenstands gemäß CPC:
B60W 30/08 (2013.01); B60W 30/14 (2013.01)
Recherchierter Prüfstoff (Klassifikation):
B60W
Konsultierte Online-Datenbank:
EPODOC, WPIAP, TXTnn
Dieser Recherchenbericht wurde zu den am 29.03.2017 eingereichten
Claims (3)
- Ansprüchen 1 bis 20 erstellt.Kategorie*·Bezeichnung der Veröffentlichung:Ländercode, Veröffentlichungsnummer, Dokumentart (Anmelder), Veröffentlichungsdatum, Textstelle oder Figur soweit erforderlichBetreffendAnspruchXYYYYADE 102013210941 Al (BOSCH GMBH ROBERT [DE]) 18. Dezember 2014 (18.12.2014)Abs.
- 2 bis 30DE 10200002 Al (PAL ZOLTAN [DE]) 22. August 2002 (22.08.2002)Abs. 10 bis 12, 39 bis 48 und 59 bis 61DE 102014208311 Al (CONTI TEMIC MICROELECTRONIC [DE])05. November 2015 (05.11.2015)Abs. 13, 14 und 24 bis 31DE 102013225057 Al (FRAUNHOFER GES ZUR FÖRDERUNG DERANGEWANDTEN FORSCHUNG Ε V [DE]) 11. Juni 2015 (11.06.2015)Abs. 13 und 23 bis 50DE 10334203 Al (VOLKSWAGEN AG [DE]) 10. März 2005 (10.03.2005)Abs. 31 bis 391, 2, 5 bis 9, 13 bis 17,19, 20
- 3, 4, 10 bis 12, 183, 10 bis bis 20Datum der Beendigung der Recherche: ς t 1 1 Prüfer(in):05.02.2018 bene 1 von 1 WEISZ Andreas > Kategorien der angeführten Dokumente: A Veröffentlichung, die den allgemeinen Stand der Technik definiert.X Veröffentlichung von besonderer Bedeutung: der Anmeldungs- P Dokument, das von Bedeutung ist (Kategorien X oder Y), jedoch nach gegenständ kann allein aufgrund dieser Druckschrift nicht als neu bzw. auf dem Prioritätstag der Anmeldung veröffentlicht wurde.erfinderischer Tätigkeit beruhend betrachtet werden. E Dokument, das von besonderer Bedeutung ist (Kategorie X), aus demY Veröffentlichung von Bedeutung: der Anmeldungsgegenstand kann nicht ein „älteres Recht“ hervorgehen könnte (früheres Anmeldedatum, jedoch als auf erfinderischer Tätigkeit beruhend betrachtet werden, wenn die nachveröffentlicht, Schutz ist in Österreich möglich, würde Neuheit in FrageVeröffentlichung mit einer oder mehreren weiteren Veröffentlichungen stellen).dieser Kategorie in Verbindung gebracht wird und diese Verbindung für & Veröffentlichung, die Mitglied der selben Patentfamilie ist.einen Fachmann naheliegend ist.1/1DVR 0078018
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102016205152.0A DE102016205152A1 (de) | 2016-03-29 | 2016-03-29 | Fahrerassistenzsystem zum Unterstützen eines Fahrers beim Führen eines Fahrzeugs |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| AT518489A2 AT518489A2 (de) | 2017-10-15 |
| AT518489A3 true AT518489A3 (de) | 2018-04-15 |
| AT518489B1 AT518489B1 (de) | 2019-07-15 |
Family
ID=58464530
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| ATA50248/2017A AT518489B1 (de) | 2016-03-29 | 2017-03-29 | Fahrerassistenzsystem zum Unterstützen eines Fahrers beim Führen eines Fahrzeugs |
Country Status (3)
| Country | Link |
|---|---|
| AT (1) | AT518489B1 (de) |
| DE (1) | DE102016205152A1 (de) |
| WO (1) | WO2017167801A1 (de) |
Families Citing this family (29)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102017219301A1 (de) * | 2017-10-27 | 2019-05-02 | Bayerische Motoren Werke Aktiengesellschaft | Verfahren zur Erhöhung der Sicherheit bei Gefahrensituationen betreffend den Straßenverkehr |
| DE102017125729A1 (de) * | 2017-11-03 | 2019-05-23 | Audi Ag | Fahrerassistenzsystem für ein zumindest teilweise automatisch fahrendes Kraftfahrzeug, Kraftfahrzeug und Verfahren zum Regeln einer Fahrdynamik |
| DE102018207069B4 (de) * | 2018-05-07 | 2023-10-12 | Zf Friedrichshafen Ag | Verfahren und Steuereinheit zum Betreiben eines autonomen Fahrzeugs |
| JP7125286B2 (ja) * | 2018-06-22 | 2022-08-24 | 本田技研工業株式会社 | 行動予測装置及び自動運転装置 |
| AT521724A1 (de) * | 2018-09-24 | 2020-04-15 | Avl List Gmbh | Verfahren und Vorrichtung zur Analyse eines Sensordatenstroms sowie Verfahren zum Führen eines Fahrzeugs |
| KR102474816B1 (ko) * | 2018-09-27 | 2022-12-06 | 현대자동차주식회사 | 차로 변경 제어 장치 및 방법 |
| US10739777B2 (en) * | 2018-11-20 | 2020-08-11 | Waymo Llc | Trajectory representation in behavior prediction systems |
| DE102018131470A1 (de) * | 2018-12-07 | 2020-06-10 | Zf Active Safety Gmbh | Fahrerassistenzsystem und Verfahren zum assistierten Betreiben eines Kraftfahrzeugs |
| FR3089926B1 (fr) * | 2018-12-13 | 2021-05-28 | Psa Automobiles Sa | Consolidation d’un indicateur de présence d’un objet cible pour une conduite autonome |
| DE102018132520A1 (de) * | 2018-12-17 | 2020-06-18 | Trw Automotive Gmbh | Verfahren sowie System zum Steuern eines Kraftfahrzeugs |
| DE102018133457B4 (de) | 2018-12-21 | 2020-07-09 | Volkswagen Aktiengesellschaft | Verfahren und System zum Bereitstellen von Umgebungsdaten |
| CN109711557B (zh) * | 2018-12-28 | 2022-10-14 | 西安航空学院 | 一种行车轨迹预测方法、计算机设备及存储介质 |
| DE102019200828A1 (de) * | 2019-01-24 | 2020-07-30 | Robert Bosch Gmbh | Hauptobjektauswahl für eine Assistenzfunktion oder automatisierte Fahrfunktion eines Fahrerassistenz- oder Fahrsystems eines Kraftfahrzeugs |
| DE102019205405A1 (de) * | 2019-04-15 | 2020-10-15 | Zf Friedrichshafen Ag | Ermittlung einer Eingangsgröße eines Fahrzeug-Aktuators mittels modellgestützter prädiktiver Regelung |
| JP2020175886A (ja) * | 2019-04-22 | 2020-10-29 | 株式会社デンソー | 自動運転制御装置 |
| DE102019216150A1 (de) * | 2019-10-21 | 2021-04-22 | Robert Bosch Gmbh | Regelsystem für ein Kraftfahrzeug und ein Verfahren zum Anpassen des Regelsystems |
| FR3107494B1 (fr) * | 2020-02-20 | 2022-06-24 | Psa Automobiles Sa | Procédé et système pour gérer le fonctionnement d’un régulateur de vitesse adaptatif d’un véhicule automobile en tenant compte du comportement de deux véhicules précédents |
| CN112277944B (zh) * | 2020-10-30 | 2022-10-11 | 浙江吉利控股集团有限公司 | 一种道路巡航方法、装置及介质 |
| CN113200086A (zh) * | 2021-06-21 | 2021-08-03 | 盐城工学院 | 一种智能车转向控制系统及其控制方法 |
| DE102021206886A1 (de) | 2021-06-30 | 2023-01-05 | Volkswagen Aktiengesellschaft | Verfahren zum Betreiben eines Fahrerassistenzsystems eines Fahrzeugs und Fahrzeug |
| CN113581172B (zh) * | 2021-08-04 | 2022-11-29 | 武汉理工大学 | 智能驾驶车辆面对目标车辆切入的行车场景的识别方法 |
| CN114056341B (zh) * | 2021-11-03 | 2024-01-26 | 天津五八驾考信息技术有限公司 | 驾驶培训中的驾驶辅助方法、设备及存储介质 |
| CN114506344B (zh) * | 2022-03-10 | 2024-03-08 | 福瑞泰克智能系统有限公司 | 一种车辆轨迹的确定方法及装置 |
| DE102022111538A1 (de) | 2022-05-09 | 2023-11-09 | Daimler Truck AG | Verfahren und Vorrichtung zur Planung eines Spurwechsels eines Fahrzeugs |
| CN115743132B (zh) * | 2022-08-19 | 2026-02-06 | 长安大学 | 一种考虑换道风险的智能车辆最优车道选择方法 |
| DE102023201074B4 (de) * | 2023-02-09 | 2024-10-02 | Volkswagen Aktiengesellschaft | Verfahren zum Assistieren eines Fahrers beim Steuern eines Kraftfahrzeugs sowie Kraftfahrzeug |
| CN117261904B (zh) * | 2023-11-21 | 2024-01-30 | 北京航空航天大学 | 一种自适应场景与风格的混动汽车驾驶模式决策方法 |
| EP4699883A1 (de) * | 2024-08-22 | 2026-02-25 | MAGNA Automotive Europe GmbH | Verfahren zum steuern eines zumindest teilweise assistiert fahrenden fahrzeugs |
| CN119953362B (zh) * | 2025-02-08 | 2025-11-18 | 中国重汽集团济南动力有限公司 | 车辆巡航控制方法、装置、设备、存储介质及程序产品 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE10200002A1 (de) * | 2001-01-12 | 2002-08-22 | Zoltan Pal | E-Traffic Network e-Verkehr Netzwerk Verfahren Computergestützte über Präzision Position Information Navigation Telekommunikation Verkehrsüberwachungs-Koordinations-Operationssystem |
| DE10334203A1 (de) * | 2003-07-26 | 2005-03-10 | Volkswagen Ag | Verfahren zum Betrieb eines interaktiven Verkehrsabwicklungssystemes und interaktives Verkehrsabwicklungssystem selbst |
| DE102013210941A1 (de) * | 2013-06-12 | 2014-12-18 | Robert Bosch Gmbh | Verfahren und Vorrichtung zum Betreiben eines Fahrzeugs |
| DE102013225057A1 (de) * | 2013-12-05 | 2015-06-11 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | Verfahren zum steuern eines fahrzeugs, vorrichtung zum erzeugen von steuersignalen für ein fahrzeug und fahrzeug |
| DE102014208311A1 (de) * | 2014-05-05 | 2015-11-05 | Conti Temic Microelectronic Gmbh | Fahrerassistenzsystem |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102006039583A1 (de) | 2006-08-23 | 2008-03-06 | Robert Bosch Gmbh | Fahrerassistenzsystem |
| SE535336C2 (sv) * | 2010-09-03 | 2012-07-03 | Scania Cv Ab | Styrsystem och styrmetod för fordon |
| US8457827B1 (en) | 2012-03-15 | 2013-06-04 | Google Inc. | Modifying behavior of autonomous vehicle based on predicted behavior of other vehicles |
| US8880273B1 (en) * | 2013-01-16 | 2014-11-04 | Google Inc. | System and method for determining position and distance of objects using road fiducials |
| US9248843B2 (en) | 2013-01-28 | 2016-02-02 | Kaci Intermodal Systems, Llc | Device, system and method for ground line haul |
| US8855849B1 (en) * | 2013-02-25 | 2014-10-07 | Google Inc. | Object detection based on known structures of an environment of an autonomous vehicle |
| AT514754B1 (de) | 2013-09-05 | 2018-06-15 | Avl List Gmbh | Verfahren und Vorrichtung zur Optimierung von Fahrassistenzsystemen |
| MX356836B (es) * | 2013-12-11 | 2018-06-15 | Intel Corp | Asistencia computarizada adaptada de preferencias de conducción individuales o conducción autónoma de vehículos. |
| EP2942765B1 (de) | 2014-05-07 | 2018-12-26 | Honda Research Institute Europe GmbH | Verfahren und System zur prädiktiven Spurwechselassistenz, Programm, Softwareprodukt und Fahrzeug |
-
2016
- 2016-03-29 DE DE102016205152.0A patent/DE102016205152A1/de active Pending
-
2017
- 2017-03-29 AT ATA50248/2017A patent/AT518489B1/de active
- 2017-03-29 WO PCT/EP2017/057400 patent/WO2017167801A1/de not_active Ceased
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE10200002A1 (de) * | 2001-01-12 | 2002-08-22 | Zoltan Pal | E-Traffic Network e-Verkehr Netzwerk Verfahren Computergestützte über Präzision Position Information Navigation Telekommunikation Verkehrsüberwachungs-Koordinations-Operationssystem |
| DE10334203A1 (de) * | 2003-07-26 | 2005-03-10 | Volkswagen Ag | Verfahren zum Betrieb eines interaktiven Verkehrsabwicklungssystemes und interaktives Verkehrsabwicklungssystem selbst |
| DE102013210941A1 (de) * | 2013-06-12 | 2014-12-18 | Robert Bosch Gmbh | Verfahren und Vorrichtung zum Betreiben eines Fahrzeugs |
| DE102013225057A1 (de) * | 2013-12-05 | 2015-06-11 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | Verfahren zum steuern eines fahrzeugs, vorrichtung zum erzeugen von steuersignalen für ein fahrzeug und fahrzeug |
| DE102014208311A1 (de) * | 2014-05-05 | 2015-11-05 | Conti Temic Microelectronic Gmbh | Fahrerassistenzsystem |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2017167801A1 (de) | 2017-10-05 |
| AT518489B1 (de) | 2019-07-15 |
| DE102016205152A1 (de) | 2017-10-05 |
| AT518489A2 (de) | 2017-10-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| AT518489A3 (de) | Fahrerassistenzsystem zum Unterstützen eines Fahrers beim Führen eines Fahrzeugs | |
| AT518444A3 (de) | Verfahren zum Erzeugen von Steuerdaten für ein regelbasiertes Unterstützen eines Fahrers | |
| EP3365741B1 (de) | Verfahren zur vollautomatischen führung eines fahrzeugsystems und kraftfahrzeug | |
| DE102013019424B4 (de) | Verfahren zum Betrieb eines Fahrzeugsystems zur Überwachung eines Fahrers und Kraftfahrzeug | |
| DE102011078946A1 (de) | Verfahren und Anordnung zum Bestimmen eines am ehesten wahrscheinlichen Fahrpfads eines Fahrzeugs | |
| AT14433U3 (de) | Automatisierter Fahrstreifenwechsel im dynamischen Verkehr, basierend auf fahrdynamisch bedingten Einschränkungen | |
| DE102013013865B3 (de) | Verfahren zum Betrieb eines Kraftfahrzeugs mit einem Sicherheitssystem und einem vollautomatischen Fahrerassistenzsystem und Kraftfahrzeug | |
| EP2113437A2 (de) | Verfahren zur Bestimmung von freien Bereichen in der, insbesondere für die Fahrzeugführung relevanten Umgebung eines Kraftfahrzeugs | |
| EP3609755B1 (de) | Fahrerassistenzsystem für ein fahrzeug | |
| DE102009028451A1 (de) | Kollisionsüberwachung für ein Kraftfahrzeug | |
| WO2020178098A1 (de) | Verfahren zum zumindest teilautomatisierten führen eines kraftfahrzeugs | |
| EP3013659B1 (de) | Vorhersage des zukünftigen fahrpfades eines fahrzeuges | |
| DE102018214975A1 (de) | Verfahren und Vorrichtung zur Visualisierung einer bevorstehenden Beschleunigung in einem hochautomatisierten Fahrzeug | |
| DE102009014544A1 (de) | Verfahren und Anordnung zur Zustandsanzeige von Fahrerassistenz/informationssystemen | |
| EP3667568A1 (de) | Konfiguration eines steuerungssystems für ein zumindest teilautonomes kraftfahrzeug | |
| DE102014014858A1 (de) | Steuergerät für ein Kraftfahrzeug, Kraftfahrzeug und Verfahren zum abgesicherten Durchführen einer Funktion | |
| DE102022000331A1 (de) | Verfahren zur Detektion von Geisterobjekten in Sensormessungen | |
| DE102022214267A1 (de) | Computer-implementiertes Verfahren und System zur Verhaltensplanung eines zumindest teilautomatisierten EGO-Fahrzeugs | |
| DE102016014366A1 (de) | Verfahren zum Betrieb eines Fahrerassistenzsystems | |
| EP3742419A1 (de) | Risikoreduzierung im strassenverkehr | |
| DE102013104335A1 (de) | Verfahren zur Auslösung einer Fahrerassistenzfunktion bei einer Detektion eines Bremslichtes mittels einer Kamera | |
| DE102021209817A1 (de) | Verfahren zur mehrstufigen Fusion von Messdaten | |
| DE102021003286A1 (de) | Verfahren zum Betrieb eines Fahrzeuges | |
| DE102015012648A1 (de) | Verfahren zum Betrieb wenigstens eines Fahrzeugsystems eines Kraftfahrzeugs und Kraftfahrzeug | |
| DE102020107282B4 (de) | Verfahren zur Entscheidungsfindung für ein Fahrassistenzsystem zum automatisierten Fahren eines Fahrzeugs |