BRPI0702994B1 - dispositivo de comando regulado de parada de precisão destinado a um veículo com pilotagem automática e processo de comando regulado de parada de precisão de veículos - Google Patents
dispositivo de comando regulado de parada de precisão destinado a um veículo com pilotagem automática e processo de comando regulado de parada de precisão de veículos Download PDFInfo
- Publication number
- BRPI0702994B1 BRPI0702994B1 BRPI0702994A BRPI0702994A BRPI0702994B1 BR PI0702994 B1 BRPI0702994 B1 BR PI0702994B1 BR PI0702994 A BRPI0702994 A BR PI0702994A BR PI0702994 A BRPI0702994 A BR PI0702994A BR PI0702994 B1 BRPI0702994 B1 BR PI0702994B1
- Authority
- BR
- Brazil
- Prior art keywords
- command
- input
- regulated
- observed
- deceleration
- Prior art date
Links
- 230000001105 regulatory effect Effects 0.000 title claims abstract description 74
- 238000000034 method Methods 0.000 title claims abstract description 34
- 230000008569 process Effects 0.000 title claims abstract description 33
- 230000006978 adaptation Effects 0.000 claims abstract description 74
- 238000012546 transfer Methods 0.000 claims abstract description 10
- 230000004044 response Effects 0.000 claims description 29
- 230000004913 activation Effects 0.000 claims description 10
- 238000012937 correction Methods 0.000 claims description 10
- 230000000694 effects Effects 0.000 claims description 4
- 230000015572 biosynthetic process Effects 0.000 claims description 3
- 238000003786 synthesis reaction Methods 0.000 claims description 3
- 230000003213 activating effect Effects 0.000 claims description 2
- 230000002123 temporal effect Effects 0.000 claims 2
- 230000001133 acceleration Effects 0.000 description 10
- 238000004364 calculation method Methods 0.000 description 4
- 239000006185 dispersion Substances 0.000 description 4
- 230000007246 mechanism Effects 0.000 description 4
- 238000010586 diagram Methods 0.000 description 3
- 238000012360 testing method Methods 0.000 description 3
- 238000011144 upstream manufacturing Methods 0.000 description 3
- 230000032683 aging Effects 0.000 description 2
- 230000010354 integration Effects 0.000 description 2
- 238000012423 maintenance Methods 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 238000012545 processing Methods 0.000 description 2
- 238000005070 sampling Methods 0.000 description 2
- 230000009471 action Effects 0.000 description 1
- 230000003044 adaptive effect Effects 0.000 description 1
- 230000036461 convulsion Effects 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 230000001960 triggered effect Effects 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L15/00—Indicators provided on the vehicle or train for signalling purposes
- B61L15/0062—On-board target speed calculation or supervision
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L27/00—Central railway traffic control systems; Trackside control; Communication systems specially adapted therefor
- B61L27/04—Automatic systems, e.g. controlled by train; Change-over to manual control
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B13/00—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion
- G05B13/02—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion electric
- G05B13/0205—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion electric not using a model or a simulator of the controlled system
- G05B13/024—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion electric not using a model or a simulator of the controlled system in which a parameter or coefficient is automatically adjusted to optimise the performance
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Evolutionary Computation (AREA)
- Medical Informatics (AREA)
- Software Systems (AREA)
- Physics & Mathematics (AREA)
- Health & Medical Sciences (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Artificial Intelligence (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Regulating Braking Force (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
- Feedback Control In General (AREA)
- Train Traffic Observation, Control, And Security (AREA)
- Finish Polishing, Edge Sharpening, And Grinding By Specific Grinding Devices (AREA)
- Output Control And Ontrol Of Special Type Engine (AREA)
Abstract
dispositivo de comando regulado de parada de precisão destinado a um veículo com pilotagem automática e processo de comando regulado de parada de precisão de veículos. a presente invenção trata de um dispositivo de comando regulado (10) de parada de precisão destinado a um veículo (4) com pilotagem automática compreende: uma entrada cinemática (44, 46) observada apta a receber pelo menos uma grandeza variável cinemática observada do veículo (4); uma entrada de instrução (42) predeterminada, apta a receber um sinal de instrução, de comando não regulado; e uma saída (40) de comando regulado função da entrada cinemática (44, 46) observada e da entrada de instrução (42) de acordo com uma função de transferência característica predeterminada que comporta pelo menos um parâmetro interno (k, r). o dispositivo compreende uma unidade de comando de adaptação (60) apto a modificar pelo menos um parâmetro interno (k, r) em função da entrada cinemática (44, 46) observada e a entrada de instrução (42).
Description
(54) Título: DISPOSITIVO DE COMANDO REGULADO DE PARADA DE PRECISÃO DESTINADO A UM VEÍCULO COM PILOTAGEM AUTOMÁTICA E PROCESSO DE COMANDO REGULADO DE PARADA DE PRECISÃO DE VEÍCULOS (51) Int.CI.: G05D 13/00; G05B 11/36; B61L 27/04.
(30) Prioridade Unionista: 25/08/2006 PR 0607537.
(73) Titular(es): ALSTOM TRANSPORT TECHNOLOGIES.
(72) lnventor(es): BERNARD DEMAYA; JÉRÔME FOREAU.
(57) Resumo: DISPOSITIVO DE COMANDO REGULADO DE PARADA DE PRECISÃO DESTINADO A UM VEÍCULO COM PILOTAGEM AUTOMÁTICA E PROCESSO DE COMANDO REGULADO DE PARADA DE PRECISÃO DE VEÍCULOS. A presente invenção trata de um dispositivo de comando regulado (10) de parada de precisão destinado a um veículo (4) com pilotagem automática compreende: uma entrada cinemática (44, 46) observada apta a receber pelo menos uma grandeza variável cinemática observada do veículo (4); uma entrada de instrução (42) predeterminada, apta a receber um sinal de instrução, de comando não regulado; e uma saída (40) de comando regulado função da entrada cinemática (44, 46) observada e da entrada de instrução (42) de acordo com uma função de transferência característica predeterminada que comporta pelo menos um parâmetro interno (K, r). O dispositivo compreende uma unidade de comando de adaptação (60) apto a modificar pelo menos um parâmetro interno (K, r) em função da entrada cinemática (44,46) observada e a entrada de instrução (42).
Μ “DISPOSITIVO DE COMANDO REGULADO DE PARADA DE PRECISÃO DESTINADO A UM VEÍCULO COM PILOTAGEM AUTOMÁTICA E
PROCESSO DE COMANDO REGULADO DE PARADA DE PRECISÃO DE VEÍCULOS”
Campo da Invenção
A presente invenção trata de um dispositivo de comando de parada de precisão destinado a um trem com pilotagem automática.
Antecedentes da Invenção
Sabe-se que os trens, em particular os metrôs, são dotados de sistemas de pilotagem automáticas que asseguram a condução segura dos veículos entre estações e que asseguram a parada precisa do trem em cada estação.
Quando as plataformas das estações são dotadas de portas de nível, as portas do trem devem estar alinhadas com as portas da plataforma, pois a falta de alinhamento provoca um problema para a operação dos trens automáticos, em particular os metrôs sem condutor.
Se a frenagem do trem estiver regulada de modo muito intenso, o trem apresenta um caráter de frenagem excessiva que faz com que o centro das portas do trem fique deslocado a montante das portas de nível correspondentes.
Se, ao contrário, a regulagem dos freios do trem estiver muito frouxa, o trem apresenta um caráter de frenagem insuficiente o que faz com que o centro das portas do trem fique deslocado a jusante das portas de nível correspondentes.
A regulagem do dispositivo de comando de um trem deve, portanto, permitir evitar essa frenagem excessiva ou insuficiente de um trem.
Sabe-se que depois que um trem cujo dispositivo de comando de parada foi inicialmente regulado é posto em operação, as características do trem variam durante sua operação em virtude do desgaste e do envelhecimento.
A regulação realizada é então pouco apropriada para compensar essas alterações, o que se traduz por uma retomada de comando manual à distância do trem e por uma perda de tempo de operação.
O problema técnico objetivo consiste na diminuição do tempo de 5 indisponibilidade dos trens e da perda do tráfico do sistema em operação.
A finalidade da presente invenção é a diminuição do tempo de indisponibilidade dos trens e da perda do tráfico do sistema em operação.
Descrição da Invenção
Para esse fim, a presente invenção tem por objeto um dispositivo 10 de comando regulado, de parada de precisão destinado a um veículo com pilotagem automática que compreende uma entrada cinemática observada apta a receber pelo menos uma grandeza variável cinemática observada do veículo, uma entrada de instrução predeterminada, apta a receber um sinal de instrução, de comando não regulado, uma saída de comando regulado apta a fornecer pelo menos uma grandeza de comando dinâmico regulado ao veículo, função da entrada cinemática observada e da entrada de instrução segundo uma função de transferência característica predeterminada do dispositivo, e a função de transferência comporta pelo menos um parâmetro interno, caracterizado pelo fato do dispositivo compreender uma unidade de comando de adaptação apto a modificar por um comando de adaptação pelo menos um parâmetro interno, comando de adaptação esse que é função da entrada cinemática observada e da entrada de instrução.
De acordo com modos particulares de realização, o dispositivo de comando compreende uma ou mais das seguintes características considerada(s) isoladamente ou segundo todas as combinações tecnicamente possíveis:
- o dispositivo compreende dois parâmetros internos modificáveis, sendo que o primeiro parâmetro é um atraso de resposta dinâmica associado ao veículo e o segundo parâmetro é um comando de viés de regulação dinâmica;
2Ά
- o comando de adaptação é função de uma diferença entre, de um lado, a entrada cinemática observada, e, de outro lado, uma grandeza cinemática esperada, determinada a partir de um módulo de resposta dinâmica predeterminado associado ao veículo e a partir da entrada de instrução;
- o comando de adaptação depende ainda de pelo menos um parâmetro de convergência função de um comando de regulação;
- a função de comando está dividida em classes definidas em função da diferença entre a entrada cinemática observada e a grandeza cinemática esperada, e o pelo menos um parâmetro de convergência;
- a entrada de instrução é uma entrada de recebimento de uma instrução de desaceleração do veículo,
- a entrada cinemática observada compreende uma entrada de recebimento de uma velocidade observada e uma entrada de recebimento de uma desaceleração observada,
- a saída de comando regulado é uma saída de fornecimento de um sinal de comando regulado de desaceleração do veículo, e ele compreende u m conjunto de unidades que compõem a função de transferência do dispositivo;
- o dispositivo compreende;
- uma unidade de modelação que representa uma resposta dinâmica esperada do veículo à instrução de desaceleração e que permite determinar a desaceleração esperada do veículo como grandeza cinemática esperada,
- uma unidade de comparação do sinal de desaceleração esperada e do sinal de desaceleração observada,
- uma unidade de regulação que permite fornecer um sinal de comando retroativo de correção da diferença existente entre a desaceleração esperada e a desaceleração observada,
- uma unidade de síntese para determinar um sinal de comando regulado em função do sinal de instrução e do sinal retroativo de correção;
- a unidade de comando de adaptação compreende:
- uma primeira entrada de unidade de comando de adaptação 5 destinada a receber a instrução de desaceleração,
- uma segunda entrada de comando de adaptação destinada a receber a desaceleração observada,
- um estimador de um tempo de resposta comparando a curva de variação temporal da desaceleração esperada com a da desaceleração observada,
- pelo menos um estimador estatístico de parâmetro de convergência representativo da precisão de parada função da desaceleração observada do veículo e da instrução de desaceleração do trem;
- a unidade de regulação compreende:
- uma entrada de unidade de regulação destinada a receber ba diferença existente entre a desaceleração esperada e a desaceleração observada,
- uma saída de fornecimento de um componente de regulação de tipo integral chamada comando integral, e a unidade de adaptação compreende uma terceira entrada conectada com a saída de comando integral da unidade de regulação;
- um estimador da unidade de adaptação está apto a determinar um critério de convergência baseado no sinal de comando integral de regulação fornecida na entrada;
- a unidade de comando de adaptação está apta a:
- identificar por um processo de classificação uma classe de frenagem de veículo função, de um lado, da diferença de um tempo de resposta observado e de um tempo previsto pela unidade de modelação do efeito da instrução enviada ao veículo e, de outro lado, de pelo menos um parâmetro de convergência,
- atribuir comandos de adaptação função da classe de frenagem do veículo;
- a unidade de comando de adaptação compreende:
- uma entrada de fornecimento de uma velocidade observada do trem,
- um primeiro estimador estatístico de um primeiro parâmetro de convergência representativo do desempenho de parada função da desaceleração observada e da instrução de desaceleração,
- um segundo estimador estatístico de um segundo parâmetro de convergência representativo do desempenho de parada em função da velocidade observada, da desaceleração observada e da instrução de desaceleração;
- a unidade de comando de adaptação compreende:
uma primeira saída apta a emitir um comando de viés de regulação do comando, uma segunda saída apta a emitir um comando de ajuste do atraso de resposta dinâmica,
- a primeira saída da unidade de comando de adaptação está conectada com a entrada da unidade de regulação, e a segunda saída da unidade de comando de adaptação está conectada com a entrada da unidade de modelação para lhe fornecer um comando de ajuste de atraso;
- o dispositivo compreende:
- uma entrada de ligação / ativação do dispositivo de comando de parada, e
- meios de ligação / ativação do funcionamento do dispositivo de comando de parada;
3Ζ
- ο dispositivo de ligação / ativação compreende:
- uma entrada de comando apta a receber uma entrada de comando de ativação de modo de parada preciso de “target shooting”,
- um comutador de entradas e uma saída simples, a quaí está conectada diretamente com a entrada do veículo, e
- a conexão de uma entrada com a saída depende do sinal de comando ligação / ativação fornecida na entrada de comando.
A presente invenção tem também por objeto um processo de comando regulado de parada de precisão de veículo realizado por um dispositivo de comando regulado definido por uma função de transferência que possui pelo menos um parâmetro interno, que compreende as etapas que consistem em:
- receber, em uma entrada de instrução, uma instrução predeterminada de comando não regulado de veículo,
- receber em uma entrada cinemática observada uma grandeza cinemática observada do veículo,
- fornecer em uma saída de comando regulado, um sinal de comando regulado ao veículo, caracterizado pelo fato de compreender ainda uma etapa que consiste em:
- comandar a adaptação de pelo menos um parâmetro interno em função da entrada de instrução e da entrada cinemática observada.
De acordo com mod os particulares de realização, o processo compreende uma ou mais das seguintes característica(s) considerada(s) isoladamente ou segundo todas as combinações tecnicamente possíveis:
- o processo compreende as etapas que consistem em:
- modelar e calcular uma resposta dinâmica de veículo a uma instrução de comando do veículo em forma de uma grandeza cinemática esperada,
- comparar a grandeza cinemática esperada com a grandeza de desaceleração observada,
- regular a instrução de comando pelo fornecimento de um sinal de retroação que forma uma correção da diferença que existe entre a grandeza cinemática esperada e a grandeza cinemática observada,
- efetuar a combinação da instrução e do sinal retroativo de correção para determinar um comando regulado;
- a etapa de comando de adaptação compreende as etapas que consistem em:
- receber em uma primeira entrada a instrução comando,
- receber em uma segunda entrada a grandeza cinemática observada,
- estimar o tempo de resposta dinâmica comparando a variação temporal da grandeza cinemática esperada com a grandeza cinemática observada,
- estimar por uma estatística um parâmetro de convergência representativo da precisão de parada em função da grandeza cinemática observada e da instrução de comando;
- a etapa de comando de adaptação compreende a etapa que consiste em:
- receber um componente de regulação de tipo integral fornecido na etapa de regulação, e
- a estimativa de um critério de convergência se baseia no componente de regulação de tipo integral fornecido;
- a etapa de comando de adaptação compreende ainda as etapas que consistem em:
- identificar por um processo de classificação uma classe de frenagem de trem função, de um lado, da diferença do tempo de resposta observado e do
3k tempo previsto do efeito da instrução enviada ao veículo através do dispositivo de comando e, de outro lado, de pelo menos um parâmetro de convergência representativo de uma parada,
- atribuir comandos de adaptação função da classe de frenagem do trem;
- a etapa de comando de adaptação compreende ainda a etapa que consiste em:
- receber em uma entrada uma velocidade observada do veículo, e
- a etapa de estimativa compreende:
- uma primeira etapa de estimativa que consiste em determinar, por uma primeira estatística, um primeiro parâmetro de convergência representativo do desempenho da regulagem, função da desaceleração observada do trem e da instrução de desaceleração,
- uma segunda etapa de estimativa por uma segunda estatística um segundo parâmetro de convergência representativo do desempenho de regulagem, função da velocidade observada, da desaceleração observada e da instrução de desaceleração;
- a etapa de comando de adaptação compreende ainda as etapas que consistem em:
- emitir em uma primeira saída um comando de viés de regulação do comando regulado,
- emitir em uma segunda saída um comando de ajuste de atraso;
- o comando de ajuste de atraso é fornecido à unidade de modelação da resposta dinâmica do veículo;
-a etapa de comando de adaptação compreende ainda a etapa que consiste em:
- fornecer uma mensagem de aviso do caráter fora dos limites de um trem em caso de falha da convergência dos critérios de convergência e/ou de alinhamento do tempo de resposta ao desencadeamento da instrução de desaceleração após um número de paradas predeterminado; e
- o processo compreende ainda uma etapa que consiste em:
- ligar / acionar o dispositivo de comando regulado.
A presente invenção tem também por objeto um trem que comporta o dispositivo de acordo com a presente invenção para comandar a ação do motor e/ou do freio.
Breve Descrição dos Desenhos
A presente invenção será mais bem compreendida com a leitura da descrição de um modo de realização que será feita a seguir, dado unicamente a título de exemplo, em relação aos desenhos nos quais:
- a figura 1 é um esquema funcional de um dispositivo de pilotagem automática de trem de acordo com a presente invenção;
- a figura 2 é um gráfico de uma curva de velocidade de um trem em função da distância correspondente a uma estratégia de parada;
- a figura 3 é um esquema funcional do dispositivo de comando regulado de parada de precisão;
- a figura 4 é um fluxograma do processo de elaboração de comandos de adaptação;
- a figura 5 é um gráfico de curva que serve para a identificação do atraso do desencadeamento da instrução de desaceleração associado a um trem com frenagem insuficiente;
- a figura 6 é um gráfico de curva que serve para a identificação do atraso do desencadeamento da instrução de desaceleração associado a um trem com frenagem excessiva;
- a figura 7 é um gráfico de classificação das duas primeiras classes de frenagem de acordo com o critério Ci, e o atraso do modelo é igual ao atraso identificado;
- a figura 8 é um par de gráficos de classificação das outras classes em relação à figura 7 em função dos critérios e C2, e o atraso do modelo é diferente do modelo identificado;
- a figura 9 é um diagrama de classificação qualitativo que 5 representa as diferentes etapas de classificação de acordo com diferentes critérios de identificação;
- a figura 10 é um gráfico de determinação dos campos de comando do dispositivo de comando;
- a figura 11 é um gráfico dos desempenhos simulados das 10 precisões de uma frota de trens quando a unidade de comando de adaptação está inativa; e
- a figura 12 é um gráfico dos desempenhos simulados das precisões de parada de trens quando a unidade de comando de adaptação está ativa.
Descrição de Realizações Particulares
A figura 1 representa um dispositivo de pilotagem automática 2 de um trem 4 que funciona sem comandos fornecidos por um condutor.
O trem 4 compreende um conjunto de carros com motores de tração e freios que servem para a frenagem e a parada do trem. Como 20 variante, o trem pode ser um veículo automático qualquer.
O trem 4 está apto receber, em uma entrada de comando 6, um comando regulado de aceleração / desaceleração e a fornecer, em uma saída de observação 8, a aceleração / desaceleração observada aqui em forma de uma medida a bordo do trem.
O dispositivo de pilotagem automática 2 compreende um dispositivo de comando regulado 10 de parada de precisão, um estimador de parâmetros cinemáticos 12 do trem 4 e uma unidade central 14 de pilotagem do trem sem condutor.
3711
O estimador de parâmetros cinemáticos 12 compreende uma primeira entrada 16 de estimador destinada a receber uma instrução de aceleração / desaceleração elaborada pore proveniente da unidade central 14. O estimador de parâmetros cinemáticos compreende também uma primeira e segunda saídas 18, 20 de estimador aptas a fornecer respectivamente uma distância estimada d em relação a uma baltsa de localização no terreno e uma velocidade cinemática v estimada do trem.
O estimador de parâmetros cinemáticos 12 compreende a montante, um circuito 22 de atraso do desencadeamento da instrução e , a jusante, um integrador cinemático 24 com preditor Z corretor. O circuito de atraso 22 está apto a receber a instrução de aceleração Z desaceleração proveniente da entrada 16 e a receber, em uma entrada 26 de regulagem de atraso, um comando de regulagem de atraso identificado pela referência τ . O estimador de parâmetros cinemáticos 28 compreende ainda uma entrada de inicialização 27, destinada a receber parâmetros de inicialização de processamento cinemático.
A unidade central de pilotagem 14 encarregada da coordenação das tarefas do dispositivo de pilotagem automática 2 compreende uma primeira entrada 30 e uma segunda entrada 32 destinadas a receber respectivamente a distância estimada d e a velocidade estimada v provenientes do estimador de parâmetros cinemáticos 12. A unidade central de pilotagem 14 compreende ainda uma primeira saída de sinal de instrução de aceleração Z desaceleração 34 e uma segunda saída 36 de fornecimento de sinal de seleção de modo condução Z frenagem e uma terceira saída 38 de fornecimento da velocidade v cinemática do trem.
O dispositivo de comando regulado 10 comporta uma saída de comando regulado 40, apta a emitir um sinal de comando regulado do trem e conectada com a entrada 6 do trem 4.
O dispositivo de comando de parada de precisão compreende igualmente uma primeira entrada 42 apta a receber uma instrução de
3« aceleração / desaceleração proveniente da saída 34 da unidade central, uma segunda entrada 44 de recebimento do sinal de estimativa de velocidade v proveniente da saída 38, uma terceira entrada 46, apta a receber a desaceleração observada do trem, proveniente da saída 8 do trem 4 e uma quarta entrada 48 de comando de seleção de modo proveniente da saída 36 da unidade central.
Em funcionamento, o dispositivo de pilotagem automática 2 permite realizar uma estratégia de parada tal como representada pela figura 2.
A figura 2 representa o aspecto da velocidade realizada do trem 10 50 em função da distância para a estratégia de parada escolhida.
A fase 1, indicada pelo algarismo 1 emoldurada por um quadrado, representa uma fase de frenagem até uma distância próxima do ponto de parada na estação que sucede uma condução em velocidade constante.
A fase 2 permite anular o esforço de frenagem de modo a 15 assegurar o conforto dos passageiros evitando o solavanco final de frenagem.#
A fase 3 é uma fase em velocidade constante νφ3 chamada “velocidade de patamar”. Essa velocidade deve ser suficientemente baixa para otimizar o conforto e não muito baixa para evitar que um trem com frenagem excessiva pare a montante do ponto de parada na estação. A distância percorrida em baixa velocidade deve ser a menor possível, a fim de assegurar um conforto visual além de um conforto de condução.
A fase 4 é opcional. Ela é útil para trens em que é impossível manter o sistema de frenagem pneumática em pressão aplicando um esforço de frenagem nulo. Essa fase, quando presente, é a fase de colocação de uma frenagem pneumática em pressão.
Finalmente, a fase 5 chamada de “frenagem telecomandada é a fase de frenagem final. A frenagem final não deve ser muito forte para assegurar o conforto dos passageiros. A frenagem deve permitir manter o trem parado.
Durante as fases 1 a 4, a unidade central de pilotagem 14 seleciona um primeiro modo de comando, chamado de condução, pelo envio de um comando de seleção de modo proveniente da saída 36 ao dispositivo de comando de parada de precisão 10. Nesse modo de condução, o dispositivo de comando de parada 10 é transparente e transmite a instrução de desaceleração proveniente da unidade central de pilotagem 14, e a transmite integralmente à entrada do trem. Durante as quatro fases 1 a 4, o comando efetivo recebido pelo trem 4 é elaborado apenas pela unidade central de pilotagem 14 e é igual à instrução de pilotagem.
Durante a fase 3, a unidade central de pilotagem 14 verifica se que a fase de frenagem telecomandada deve ser ativada comparando um valor de limiar com a distância de parada percorrida, calculada pelo estimador de parâmetros cinemáticos.
Para determinar a distância de parada percorrida, o estimador dos parâmetros cinemáticos 12 utiliza uma modelação de frenagem do trem em aceleração / desaceleração e sua derivada também chamada “jerk”. O estimador dos parâmetros cinemáticos 12 integra o modelo em aceleração / desaceleração duas vezes, uma vez para obter a velocidade cinemática v e une segunda vez para obter a distância d, e condições iniciais foram reguladas na entrada 27 a partir de um sinal de localização.
O cálculo preditivo é feito em cada ciclo de cálculo da unidade central 14 e as duas integrações são feitas a partir de um método de integração digital baseado em um preditor corretor 24.
Assim, quando a distância percorrida d calculada estiver próxima do ponto de parada na estação, as fases 4 e 5 são ativadas pela unidade central de pilotagem 14.
Ao utilizar esse princípio de cálculo da distância de parada, a unidade de pilotagem evita o comportamento de trem com frenagem insuficiente ou excessiva. Além disso, isso permite não utilizar uma balisa de ho ativação dedicada para a frenagem e situada na entrada da estação para as fases 4 e 5, e aiém de fazer com que a precisão de parada seja maior.
A figura 3 representa uma forma de realização do dispositivo de comando regulado 10.
O dispositivo de comando regulado 10 compreende uma unidade de modelação ou circuito de modelo 52 da resposta dinâmica do trem, uma unidade de comparação 54, neste caso um comparador, da resposta do modelo com a resposta real do trem 4, uma unidade de regulação 56 de fornecimento de um comando global retroativo de correção, e uma unidade de síntese, neste caso um adicionador 58 para determinar um sinal de comando regulado do trem função do sinal de instrução e do sinal retroativo de correção.
O dispositivo de comando regulado 10 compreende ainda uma unidade de comando de adaptação 60 para regular parâmetros de comandos característicos do desempenho em precisão da parada do trem, e meios ligação / ativação da colocação em funcionamento do dispositivo de comando de parada, neste caso um comutador de modo 61.
Por comodidade de represntação das conexões, o trem 4 está representado na figura 3 no interior de um grande quadrado em linhas pontilhadas que delimita o dispositivo de comando regulado 10, mas o trem não faz parte do dispositivo de comando regulado 10. Por esse motivo, ele está delimitado no interior de um segundo quadrado menor em linhas pontilhadas destinado a separá-lo do dispositivo de comando regulado 10 que o envolve.
O comutador de modos 61 é dotado de uma saída simples 62 destinada a fornecer o sinal de comando regulado em entrada 6 do trem 4 através da saída 40. O comutador de modos 61 compreende também uma primeira entrada 64 de comando conectada com 44, apta a receber um comando de modo, uma segunda entrada 66 de modo de condução conectada com 42 destinada a receber o sinal de instrução de aceleração / desaceleração, e uma terceira entrada 68 apta a receber um sinal de comando regulado de parada.
O circuito de modelo 52 da resposta dinâmica do trem compreende uma primeira entrada 70 para receber o sinal de instrução de desaceleração do trem 4 e uma saída 72 para emitir a resposta dinâmica de desaceleração modelada do trem 4. A saída 72 do circuito de modelo 52 está conectada com uma primeira entrada 74 do comparador 54 de recebimento da resposta do modelo.
O comparador 54 compreende ainda uma segunda entrada 76 conectada com a entrada 48 para receber a desaceleração observada do trem proveniente da saída 8 do trem 4.
O comparador compreende finalmente uma saída 78 de fornecimento de sinal de erro conectada com uma primeira entrada 80 da unidade de regulação 56.
A unidade de regulação 56 permite de determinar um sinal de correção chamado de “regulação” de acordo com duas componentes, uma primeira chamada proporcional e uma segunda chamada integral.
A unidade de regulação 56 compreende uma primeira saída 82 para emitir o sinal de correção global e uma segunda saída 83 que permite emitir o sinal de comando integral.
O adicionador 58 compreende uma primeira entrada 84 conectada com a primeira saída 82 da unidade de regulação 56 e uma segunda entrada 86 conectada com 42 que permite receber o sinal de instrução de desaceleração. O adicionador 58 compreende também uma saída 88 de adicionador que permite emitir o resultado da adição dos dois sinais fornecidos nas entradas 84 e 86.
A unidade de comando de adaptação 60 compreende uma primeira entrada 91 conectada com 48 destinada a receber a observação de aceleração / desaceleração do trem proveniente de 8, uma segunda entrada 92 conectada com 83 apta a receber o comando integral da unidade de regulação

56, uma terceira entrada 94 conectada com 42 apta a receber a instrução de desaceleração, e uma quarta entrada 96 conectada com 44 para receber a informação de velocidade cinemática v do trem 4.
A unidade de comando de adaptação 60 compreende ainda uma primeira saída 98 apta a fornecer uma viés de comando de regulação indicado pela referência K a uma segunda entrada 100 de adaptação da unidade de regulação 56.
A unidade de comando de adaptação 60 compreende ainda uma segunda saída 102 apta a fornecer um comando de adaptação relativa ao atraso indicada pela referência T a uma segunda entrada 104 de regulagem do circuito de modelo 52 da resposta dinâmica do trem 4. Além disso, de modo opcional a segunda saída da unidade de adaptação está conectada com uma saída auxiliar 106 do dispositivo de comando que permite fornecer o valor T do comando de adaptação de atraso a um outro circuito.
Em funcionamento durante fases 4 e 5, o sinal de comando de seleção está colocado em um segundo modo chamado modo de parada. Assim, o dispositivo de comando de parada 10 é ativado para comandar a parada de precisão na fase de frenagem telecomandada.
Em fu ncionamento, um processo é realizado pela unidade de comando de adaptação 60, no qual classes de pertencimento do trem que caracterizam seu tipo de frenagem são determinadas. Em função da classe de pertencimento do trem, a unidade de comando de adaptação 60 fornece diferentes comandos, ou seja, o viés de comando de regulação K em 56 e o comando de adaptação de atraso r em 52.
O processo utilizado pela unidade de comando de adaptação 60 está descrito em detalhe a seguir.
Em uma etapa 108, um medidor de paradas i é inicializado no valor 1. Para cada parada i de um trem considerado que possui uma carga de inércia Q, kò considerada aqui praticamente constante e permanente, uma etapa de cálcuio de critério 110 e uma etapa de identificação do atraso 112 são realizadas.
Na etapa 110, um primeiro critério Ci‘(Q) e um segundo C2'(Q) são calculados da seguinte maneira.
C,'(Q)= £ Reg,„,W/Ar i = l c2' (Q) em que:
k designa um número de amostra de uma amostragem de medidas efetuada durante as fases 4 e 5;
N designa o tamanho de uma estatística;
Regint(k) designa a componente integral do comando da unidade de regulação 56 que corresponde à amostragem de ordem k fornecida na entrada 92;
νφ3 designa o valor da velocidade de patamar do trem durante a 15 fase 3 fornecida na entrada 96;
Pressupõe-se que o valor de N é escolhido de modo a permitir a determinação de um valor de Ci‘(Q) e de um valor de C2'(Q) convergentes em relação à variável k.
Na etapa 11 2, a identificação d o atraso do desencadeamento 20 efetiva da instrução de desaceleração é realizada.
Um teste na etapa 114 é efetuado no número de paradas realizado pelo trem, contabilizado pelo valor i do medidor de paradas comparando i a um valor de limiar x predeterminado. Se o valor limiar não for atingido, o valor i do medidor é incrementado de uma unidade e as etapas 110,
112 são novamente efetuadas.
Quando o valor limiar x for atingido pelo medidor, um primeiro e um segundo critérios médios Ci'(Q) e C2'(Q) bem como um atraso médio T(Q)

são calculados na etapa 118 pelos seguintes algoritmos:
0,(0) = pC\(Q)/X ;=]
Cz(Q) = pC‘,(Q)/X i=l
T(Q) = £ T\oyx ( = 1 em que:
i: designa uma ordem de parada do trem ou índice de ensaio; x: designa o tamanho de uma estatística de paradas;
C/fQ): designa o valor do primeiro critério calculado na etapa 110 para a parada de ordem i do trem considerado;
C2'(Q): designa o valor do segundo critério calculado na etapa 110 para a parada de ordem i do trem considerado;
T'(Q): designa o valor de atraso do desencadeamento da instrução identificada durante o ensaio de ordem i do trem.
Em uma etapa seguinte 120, com base em um processo de classificação, uma classe de frenagem que caracteriza um tipo de frenagem de trem é identificada e atribuída ao trem em função dos critérios médios de convergência Ci(Q), C2(Q) e do atraso médio T(Q) que serão considerados neste caso independentes de Q e que serão designados por simplificação Ci, C2 e T.
Em uma etapa seguinte 122, os comandos de adaptação, funções da classe de frenagem do trem, são determinados com base em um processo de atribuição de comando que vai ser descrito a seguir.
Em uma etapa final 124, verifica-se se os parâmetros de regulagem foram realmente modificados.
As figuras 5 e 6 que representam gráficos de curvas que servem para realizar o processo de identificação do atraso T'(Q) da etapa 112.
Neste caso, os gráficos de curvas são registrados pela unidade de comando de adaptação 60 em forma de uma de seqüência de amostras digitalizadas da desaceleração medida do trem 4 fornecida na entrada 91.
A desaceleração alvo indicada nas figuras 5 e 6 é a instrução de desaceleração de “frenagem telecomandada” (target shooting) fornecida pela unidade central de pilotagem 14 para a terceira entrada 94 da unidade de comando de adaptação 60 antes da execução da fase de “frenagem telecomandada.
O instante de ativação 126 da fase de “frenagem telecomandada é o instante de recebimento da instrução de desaceleração alvo pelo dispositivo de parada e, portanto, também pela unidade de comando de adaptação.
O instante do desencadeamento da instrução de desaceleração pelo trem é o momento 128 em que uma desaceleração igual a 10% do valor alvo é observada no valor de desaceleração observado do trem fornecido na entrada 91.
A defasagem temporal dos instantes 128 e 126 representa o atraso T‘(Q).
Quando a desaceleração realizada for inferior em valor absoluto à b desaceleração alvo do trem 4, o trem apresenta uma frenagem insuficiente como representa a figura 5.
Quando a desaceleração realizada estabilizada for superior em 20 valor absoluto à desaceleração alvo do trem 4, o trem apresenta uma frenagem excessiva como representa a figura 6.
As figuras 7 e 8 representam gráficos que servem para definir o processo de classificação das frenagens de trem.
De acordo com um primeiro nível de classificação baseada na 25 diferença entre o atraso do modelo D e o atraso médio identificado T(Q), procede-se de acordo com uma das duas classificações indicadas a seguir:
uma classificação função do critério Ci somente se a diferença for nula (caso que corresponde à figura 7).
hí uma classificação função dos critérios Ci e C2 considerados juntos, se houver uma diferença (caso que corresponde à figura 8).
No caso representado na figura 7, em que o atraso do modelo D é igual ao atraso identificado T, um valor de limiar ε permite de dividir o conjunto dos valores de C1 em três intervalos dos quais um central definido por [-ε,+ε] e representados por linhas e tracejados na figura 7,
Determinou-se que se | C1 | £ ε o trem pertence à classe 2, e que no caso contrário, o trem pertence à classe 1.
No caso do atraso do modelo D ser diferente do atraso identificado T, procede-se de acordo com 0 processo de classificação descrito na figura 8.
Em uma primeira etapa, de acordo com o mesmo valor de limiar ε que mencionado acima, três famílias de classes são distinguidas de acordo com 0 valor de C1 , ou seja:
se | C11 < ε, uma primeira família constituída pelas classes 5, 6 e 7, se 0 valor de C1 for inferior a -ε, uma segunda família constituída pelas classes 8 e 9, se o valor de C1 for superior a +ε, uma terceira família constituída pelas classes 3 e 4.
A seguir, procede-se dentro de uma mesma família a uma classificação mais detalhada do nível das classes, com base no valor de C2.
Os valores de C2 estão divididos de acordo com seu posicionamento em relação a seis valores de limiar, η1, η2, η3, -η1, -η2 e -η3 com η1< η2< η3.
Dentro da primeira família, quando C2 estiver compreendido no intervalo [-η1, +η1], o trem pertence à classe 6, quando C2 estiver compreendido no intervalo ]+η1, +η2], o trem pertence à classe 5, quando C2 estiver compreendido no intervalo [-η2, -η1[, o trem pertence à classe 7,

Dentro da segunda família, quando C2 estiver compreendido no intervalo [-η3, -η2[, o trem pertence à classe 8, quando C2 for estritamente inferior a -η3, o trem pertence à classe 9.
Dentro da terceira família, quando C2 estiver compreendido no 5 intervalo ]+η2, +η3], o trem pertence à classe 4, quando C2 for estritamente superior a +η3, o trem pertence à classe 3.
Todo o processo de classificação descrito acima está representado na tabela 1.
Tabela 1
| T regra | 2a regra de seleção | 3a regra de seleção | Classe |
| SeT = D | Se Icj f ε | sem condição | Classe 2 |
| Se (Cj >ε | sem condição | Classe 1 | |
| SeT^D | Se JcJ < ε | Se | C21 < Πι | Classe 6 |
| Se ηι < C2< η2 | Classe 5 | ||
| Se - η2< C2 < - ηι | Classe 7 | ||
| Se Ci< - ε | Se - Π2 í C2 <. Γ|2 | Classe 8 | |
| Se C2<-n3 | Classe 9 | ||
| Se C1 > ε | Se η3>ο2> + η2 | Classe 4 | |
| C2 < + η3 | Classe 3 |
Uma descrição do processo de classificação em classes, expressa em termos qualificativos, é fornecida na figura 9. Os três níveis de classificação são retomados, sendo que o primeiro é o do atraso do desencadeamento da instrução, o segundo o do valor do critério Ci, e o terceiro o do valor do critério C2. Neste caso, um trem curto significa um trem com frenagem insuficiente, e um trem longo significa um trem com frenagem excessiva.
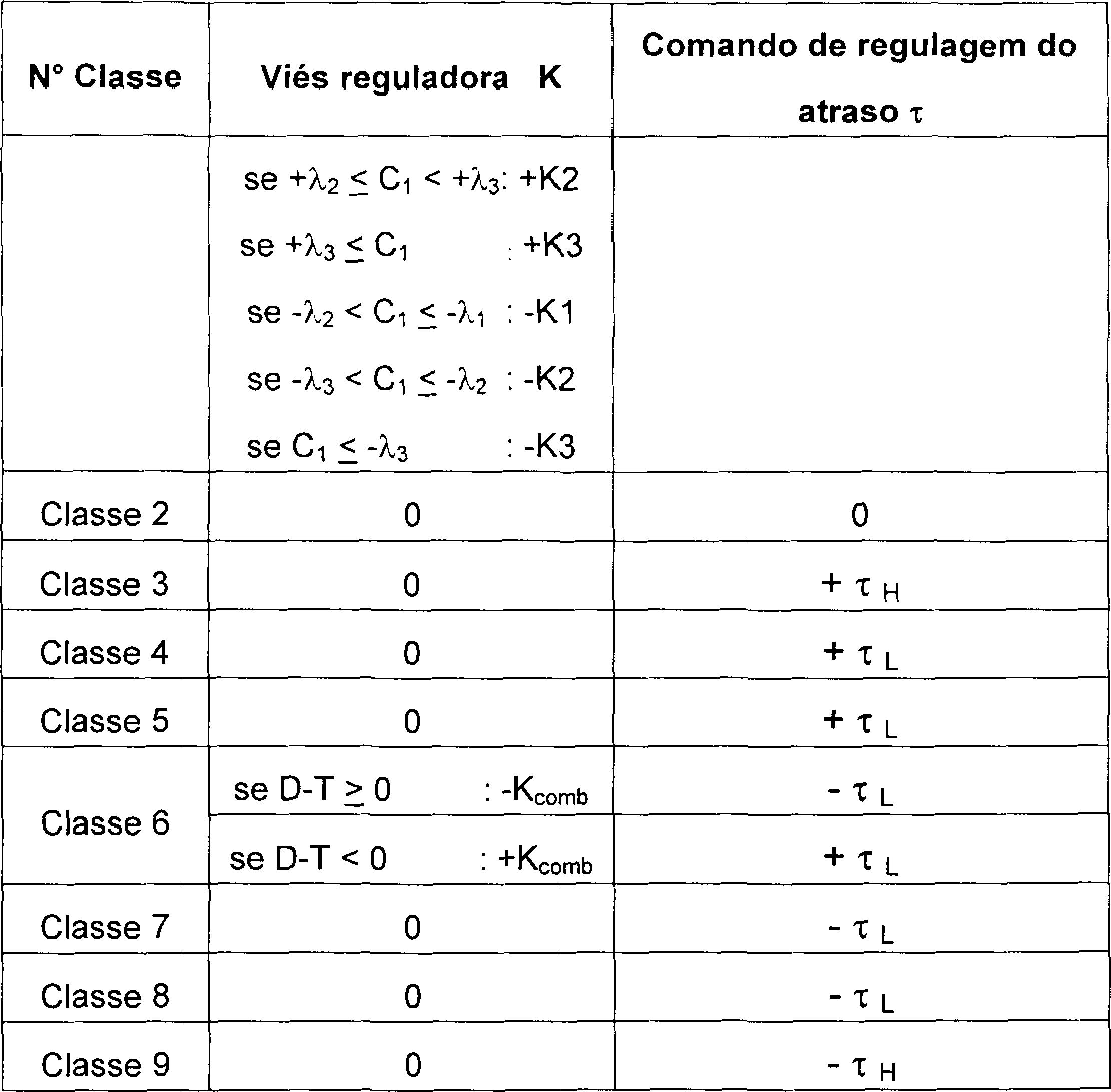
De acordo com a classe de pertencimento do trem, diferentes comandos poderão ser fornecidos pelo sistema de adaptação de comandos.
Dois tipos de comandos são fornecidos, ou seja, um viés K a ser adicionado ao comando de regulação e uma defasagem de atraso t.
Cinco estados de defasagens de atraso podem ser fornecidos, ou seja, uma ausência de defasagem ou defasagem de valor nulo, uma defasagem de valor positivo elevado +th, uma defasagem de valor baixo positive +tl, uma defasagem de valor baixo negativo -tl e uma defasagem de valor elevado negativo -th.
No que se refere ao viés K adicionado ao comando de regulação, nove valores de comando de viés podem ser fornecidos, ou seja, um valor de viés elevado positivo +K3, um valor de viés intermediário positivo +K2, um valor de viés baixo positivo +K1, um valor de viés elevado negativo -K3, um valor de viés baixo negativo -K1, um valor de viés intermediário negativo -K2, um valor de viés positivo específico da classe 6 indicada pela referência +Kcomb, um valor de viés negativo específico da classe 6, -Kcomb, bem como um valor de viés nulo.
Para a atribuição dos comandos que correspondem à classe 1, um processamento mais fino é realizado por meio do gráfico ilustrado na figura 10.
Para a classe 1, a atribuição dos comandos depende do valor assumido por Ci e de seu posicion amento em relação a um conjunto de valores de divisão indicados pelas referências -A3, - Λ2, - A1, 0, + Λ1, + À2, +
Λ3 com À1< λ2< λ3.
De acordo com o intervalo ao qual pertence C-ι, é atribuído um comando de viés.
Uma tabela de atribuição dos valores de comando definidos acima às classes é fornecida na tabela 2.
Tabela 2
| N° Classe | Viés reguladora K | Comando de regulagem do atraso τ |
| Classe 1 | se +λι < Ci < +λ2: +K1 | 0 |
Deve-se notar que o comando de correção de viés da regulação se restringe a dois limites -K3, +K3.
Se cada um desses dois limites for atingido e a frenagem do trem não pôde ser ajustada e permaneceu em uma classe de desempenhos medíocres, 5 poderá ser gerada uma mensagem para especificar o caráter não ajustável dos parâmetros de comandos. Isso pode significar que o trem não pode ser comandado para atingir o desempenho desejado e se encontra fora dos limites.
Com o dispositivo de adaptação, os desempenhos de parada dos trens ficam sensivelmente melhoradas.
Na figura 11, estão representadas especificações de parada simuladas de uma frota de trens, comercializados pela ALSTOM TRANSPORT com o nome comercial “Metropolis”, em um conjunto de 15.000 paradas quando o sistema de adaptação está inativo, ao passo que na figura 12 estão representadas as especificações de parada simuladas quando o sistema de adaptação está inativo.
Sem o mecanismo de adaptação, constata-se que a dispersão das especificações de parada é de aproximadamente mais ou menos 35 cm, ao passo que com o mecanismo de adaptação, a dispersão das paradas é de aproximadamente mais ou menos 10 cm, depois que o mecanismo de adaptação tiver sido estabelecido.
Constata-se, portanto, que no regime estabilizado a dispersão das paradas é três vezes menor que a dispersão sem o mecanismo de adaptação.
Vantajosamente, retomadas de comando manual à distância dos trens não são necessárias para alinhar os trens com as portas de nível.
Vantajosamente, não é necessário prever serviços frequentes de manutenção na oficina para atualizar a regularem do dispositivo de comando de parada do trem.
Assim, a disponibilidade dos trens e o tráfico ficam melhorados. Vantajosamente, uma ferramenta de avaliação do envelhecimento do dispositivo de comando de parada é fornecido com uma simplificação dos serviços de manutenção que consistem então em simples substituições de módulos.
Vantajosamente ainda, a instalação do trem quando ele entra na rede para ser posto em operação fica simplificada e não requer regulagens por parte de um operador no hardware ou no software.
1/9
Claims (26)
- Reivindicações1. DISPOSITIVO DE COMANDO REGULADO (10) DE PARADA DE PRECISÃO DESTINADO A UM VEÍCULO (4) COM PILOTAGEM AUTOMÁTICA, que compreende:uma entrada cinemática (44, 46) observada, apta a receber pelo menos uma grandeza variável cinemática observada do veículo (4);uma entrada de instrução (42) predeterminada, apta a receber um sinal de instrução de comando não regulado;uma saída (40) de comando regulado apta a fornecer pelo menos uma grandeza de comando dinâmico regulado ao veículo (4), função da entrada cinemática (44, 46) observada e da entrada de instrução (42) de acordo com uma função de transferência característica predeterminada do dispositivo (10), função de transferência essa que comporta pelo menos um parâmetro interno (K, τ);caracterizado pelo fato do dispositivo (10) compreender ainda uma unidade de comando de adaptação (60) apta a modificar por um comando de adaptação pelo menos um parâmetro interno (K, τ), comando de adaptação esse que é função da entrada cinemática (44, 46) observada e da entrada de instrução (42).
- 2. DISPOSITIVO DE COMANDO REGULADO (10), de acordo com a reivindicação 1, caracterizado pelo fato de compreender dois parâmetros internos modificáveis (K, τ), sendo que o primeiro parâmetro (r)éum atraso de resposta dinâmica associado ao veículo e o segundo parâmetro (K) é um comando de viés de regulação dinâmica.
- 3. DISPOSITIVO DE COMANDO REGULADO (10), de acordo com qualquer uma das reivindicações 1 a 2, caracterizado pelo fato do comando de adaptação ser função de uma diferença entre, de um lado, a entrada cinemática (44, 46) observada, e, de outro lado, uma grandeza cinemática esperada,Petição 870180056154, de 28/06/2018, pág. 11/192/9 determinada a partir de um módulo de resposta dinâmica (52) predeterminada associado ao veículo (4) e a partir da entrada de instrução (42).
- 4. DISPOSITIVO DE COMANDO REGULADO (10), de acordo com a reivindicação 3, caracterizado pelo fato do comando de adaptação (K, τ) depender ainda de pelo menos um parâmetro de convergência (Ci,C2) função de um comando de regulação (Regint).
- 5. DISPOSITIVO DE COMANDO REGULADO (10), de acordo com a reivindicação 4, caracterizado pelo fato da função de comando (Κ, τ) estar dividida em classes definidas em função da diferença entre a entrada cinemática observada (44, 46) e a grandeza cinemática esperada, e por pelo menos um parâmetro de convergência (Ci,C2).
- 6. DISPOSITIVO DE COMANDO REGULADO, de acordo com qualquer uma das reivindicações 1 a 5, caracterizado pelo fato:- da entrada de instrução ser uma entrada (42) de recebimento de uma instrução de desaceleração do veículo (4);- da entrada cinemática observada compreender uma entrada (44) de recebimento de uma velocidade observada e uma entrada (46) de recebimento de uma desaceleração observada;- da saída de comando regulado ser uma saída (40) de fornecimento de um sinal de comando regulado de desaceleração do veículo (4); e- de compreender um conjunto de unidades componentes da função de transferência (52, 56, 58, 61) do dispositivo (10).
- 7. DISPOSITIVO DE COMANDO REGULADO (10), de acordo com a reivindicação 6, caracterizado pelo fato de compreender:- uma unidade de modelação (52) que representa uma resposta dinâmica esperada do veículo (10) à instrução de desaceleração e que permite determinar a desaceleração esperada do veículo (4) como grandeza cinemática esperada;Petição 870180056154, de 28/06/2018, pág. 12/193/9- uma unidade de comparação (54) do sinal de desaceleração esperada e do sinal de desaceleração observada;- uma unidade de regulação (56) que permite fornecer um sinal de comando retroativo de correção da diferença que existe entre a desaceleração esperada e a desaceleração observada; e- uma unidade de síntese (58) para determinar um sinal de comando regulado em função do sinal de instrução e do sinal retroativo de correção.
- 8. DISPOSITIVO DE COMANDO REGULADO (10), de acordo com qualquer uma das reivindicações 6 a 7, caracterizado pelo fato da unidade de comando de adaptação (60) compreender:- uma primeira entrada (94) de unidade de comando de adaptação (60) destinada a receber a instrução de desaceleração;- uma segunda entrada (91) de comando de adaptação destinada a receber a desaceleração observada;- um estimador de um tempo de resposta comparando a curva de variação temporal da desaceleração esperada à da desaceleração observada;- pelo menos um estimador estatístico de parâmetro de convergência (C1, C2) representativo da precisão de parada função da desaceleração observada do veículo e da instrução de desaceleração do trem.
- 9. DISPOSITIVO DE COMANDO REGULADO, de acordo com qualquer uma das reivindicações 7 a 8, caracterizado pelo fato da unidade de regulação (56) compreender:- uma entrada (80) de unidade de regulação destinada a receber a diferença existente entre a desaceleração esperada e a desaceleração observada;- uma saída (83) de fornecimento de um componente de regulação de tipo integral dite comando integral;Petição 870180056154, de 28/06/2018, pág. 13/194/9 e pelo fato da unidade de adaptação (60) compreender uma terceira entrada (92) conectada com a saída (83) de comando integral da unidade de regulação (56).
- 10. DISPOSITIVO DE COMANDO REGULADO, de acordo com qualquer uma das reivindicações 8 a 9, caracterizado pelo fato de pelo menos um estimador da unidade de adaptação (60) estar apto a determinar um critério de convergência baseado no sinal de comando integral de regulação fornecido na entrada (92).
- 11. DISPOSITIVO DE COMANDO REGULADO, de acordo com qualquer uma das reivindicações 1 a 10, caracterizado pelo fato da unidade de comando de adaptação (60) estar apta a:- identificar por um processo de classificação (120) uma classe de frenagem de veículo (4) função, de um lado, da diferença de um tempo de resposta observado (T) e de um tempo previsto (D) pela unidade de modelação (52) do efeito da instrução enviada ao veículo (4) e de outro lado de pelo menos um parâmetro de convergência (C1, C2);- atribuir comandos de adaptação (K, τ) função da classe de frenagem do veículo (4).
- 12. DISPOSITIVO DE COMANDO REGULADO, de acordo com qualquer uma das reivindicações 6 a 11, caracterizado pelo fato da unidade de comando de adaptação (60) compreender:- uma entrada (96) de fornecimento de uma velocidade observada (v) do trem;- um primeiro estimador estatístico de um primeiro parâmetro de convergência (C1) representativo do desempenho de parada função da desaceleração observada e da instrução de desaceleração;- um segundo estimador estatístico de um segundo parâmetro de convergência (C2) representativo do desempenho de parada função daPetição 870180056154, de 28/06/2018, pág. 14/195/9 velocidade (νφ3) observada, da desaceleração observada e da instrução de desaceleração.
- 13. DISPOSITIVO DE COMANDO REGULADO, de acordo com qualquer uma das reivindicações 1 a 12, caracterizado pelo fato da unidade de comando de adaptação (60) compreender:- uma primeira saída (98) apta a emitir um comando de viés de regulação do comando (K); e- uma segunda saída (102) apta a emitir um comando de ajuste do atraso de resposta dinâmica (τ).
- 14. DISPOSITIVO DE COMANDO REGULADO, de acordo com a reivindicação 13, caracterizado pelo fato:- da primeira saída (98) da unidade de comando de adaptação (60) estar conectada com a entrada (100) da unidade de regulação (56); e- da segunda saída (102) da unidade de comando de adaptação (60) estar conectada com a entrada (104) da unidade de modelação (52) para lhe fornecer um comando de ajuste de atraso (τ).
- 15. DISPOSITIVO DE COMANDO REGULADO, de acordo com qualquer uma das reivindicações 1 a 14, caracterizado pelo fato pelo fato de compreender:- uma entrada (48) ligação / ativação do dispositivo de comando de parada; e- meios de ligação / ativação (61) da colocação em funcionamento do dispositivo de comando de parada.
- 16. DISPOSITIVO DE COMANDO REGULADO DE PRECISÃO, de acordo com a reivindicação 15, caracterizado pelo dispositivo de ligação / ativação (61) compreender:- uma entrada de comando (64) apta a receber uma entrada de comando de ativação de modo de parada preciso de retardo secundário;Petição 870180056154, de 28/06/2018, pág. 15/196/9- um comutador com duas entradas (66, 68) e uma saída simples (62), a saída essa (62) que está conectada diretamente à entrada (40) do veículo (4);e pelo fato da conexão de uma entrada (66, 68) com a saída (62) depender do sinal de comando ligação / ativação fornecido na entrada de comando (64).
- 17. PROCESSO DE COMANDO REGULADO DE PARADA DE PRECISÃO DE VEÍCULO, realizado por um dispositivo de comando regulado (10), conforme definido em qualquer uma das reivindicações de 1 a 16, definido por uma função de transferência que possui pelo menos um parâmetro interno (K, τ), sendo que dito processo compreende as etapas de:- receber, em uma entrada (42) de instrução, uma instrução predeterminada de comando não regulado de veículo (4);- receber em uma entrada (44, 46) cinemática observada uma grandeza cinemática observada do veículo (4);- fornecer em uma saída (40) de comando regulado, um sinal de comando regulado ao veículo (4);caracterizado por compreender adicionalmente uma etapa que consiste em:- comandar a adaptação de pelo menos um parâmetro interno (K, τ) em função da entrada de instrução (42) e da entrada cinemática (44, 46) observada.
- 18. PROCESSO DE COMANDO REGULADO, de acordo com a reivindicação 17, caracterizado pelo fato de compreender as etapas que consistem em:- modelar e calcular uma resposta dinâmica de veículo (4) a uma instrução de comando do veículo em forma de uma grandeza cinemática esperada;- comparar a grandeza cinemática esperada com a grandeza dePetição 870180056154, de 28/06/2018, pág. 16/197/9 desaceleração observada;- regular a instrução de comando pelo fornecimento de um sinal de retroação formando uma correção da diferença existente entre a grandeza cinemática esperada e a grandeza cinemática observada;- efetuar a combinação da instrução e do sinal retroativo de correção para determinar um comando regulado.
- 19. PROCESSO DE COMANDO REGULADO, de acordo com qualquer uma das reivindicações 17 ou 18, caracterizado pelo fato da etapa de comando de adaptação compreender as etapas que consistem em:- receber em uma primeira entrada (94) as instruções de comando;- receber em uma segunda entrada (91) a grandeza cinemática observada;- estimar o tempo de resposta dinâmica comparando a variação temporal da grandeza cinemática esperada com a grandeza cinemática observada;- estimar por uma estatística um parâmetro de convergência (C1, C2) representativo da precisão de parada em função da grandeza cinemática observada e da instrução de comando.
- 20. PROCESSO DE COMANDO REGULADO, de acordo com qualquer uma das reivindicações 17 a 19, caracterizado pelo fato da etapa de comando de adaptação compreender a etapa que consiste em:- receber um componente de regulação de tipo integral fornecida à etapa de regulação;e pelo fato da estimativa de um critério de convergência se basear na componente de regulação de tipo integral fornecida.
- 21. PROCESSO DE COMANDO DE PARADA, de acordo com qualquer uma das reivindicações 17 a 20, caracterizado pelo fato da etapa dePetição 870180056154, de 28/06/2018, pág. 17/198/9 comando de adaptação compreender ainda as etapas que consistem em:- identificar por um processo de classificação (120) uma classe de frenagem de trem (4) função, de um lado, da diferença do tempo de resposta observado (T) e do tempo previsto (D) do efeito da instrução enviada ao veículo (4) através do dispositivo de comando (10) e, de outro lado, de pelo menos um parâmetro de convergência (C1, C2) representativo de uma parada;- atribuir (122) comandos de adaptação (Κ, τ) em função da classe de frenagem do trem (4).
- 22. PROCESSO DE COMANDO REGULADO, de acordo com qualquer uma das reivindicações 19 a 21, caracterizado pelo fato da etapa de comando de adaptação compreender ainda a etapa que consiste em:- receber em uma entrada (96) uma velocidade observada do veículo;e pelo fato da a etapa de estimativa compreender:- uma primeira etapa de estimativa que consiste em determinar, por uma primeira estatística, um primeiro parâmetro de convergência (C1) representativo do desempenho da regulagem, função da desaceleração observada do trem e da instrução de desaceleração;- uma segunda etapa de estimativa por uma segunda estatístico un segundo parâmetro de convergência (C2) representativo do desempenho de regulagem, função da velocidade (νφ3) observada, da desaceleração observada e da instrução de desaceleração.
- 23. PROCESSO DE COMANDO REGULADO, de acordo com qualquer uma das reivindicações 17 a 22, caracterizado pelo fato da etapa de comando de adaptação compreender ainda as etapas que consistem em:- emitir em uma primeira saída (96) um comando de viés de regulação (K) do comando regulado;- emitir em uma segunda saída (102) um comando de ajuste dePetição 870180056154, de 28/06/2018, pág. 18/199/9 atraso (r).
- 24. PROCESSO DE COMANDO DE PARADA, de acordo com a reivindicação 23, caracterizado pelo fato do comando de ajuste de atraso (r) ser fornecida à unidade de modelação (52) da resposta dinâmica do veículo (4).
- 25. PROCESSO DE COMANDO REGULADO, de acordo com qualquer uma das reivindicações 19 a 24, caracterizado pelo fato da etapa de comando de adaptação compreender ainda a etapa que consiste em fornecer uma mensagem de aviso do caráter fora dos limites de um trem em caso de falha da convergência dos critérios de convergência e/ou de alinhamento do tempo de resposta ao desencadeamento da instrução de desaceleração após um número de paradas predeterminado.
- 26. PROCESSO DE COMANDO DE PARADA, de acordo com qualquer uma das reivindicações 17 a 25, caracterizado pelo fato de compreender ainda uma etapa que consiste em ligar / acionar o dispositivo de comando regulado.Petição 870180056154, de 28/06/2018, pág. 19/19 (β1/7
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR0607537A FR2905105B1 (fr) | 2006-08-25 | 2006-08-25 | Dispositif de commande regulee de vehicule a precision recentree. |
Publications (4)
| Publication Number | Publication Date |
|---|---|
| BRPI0702994A BRPI0702994A (pt) | 2008-04-22 |
| BRPI0702994A8 BRPI0702994A8 (pt) | 2016-08-16 |
| BRPI0702994B1 true BRPI0702994B1 (pt) | 2018-10-30 |
| BRPI0702994B8 BRPI0702994B8 (pt) | 2018-11-13 |
Family
ID=37909668
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| BRPI0702994A BRPI0702994B8 (pt) | 2006-08-25 | 2007-07-25 | dispositivo de comando regulado de parada de precisão destinado a um veículo com pilotagem automática e processo de comando regulado de parada de precisão de veículos |
Country Status (11)
| Country | Link |
|---|---|
| US (1) | US8224511B2 (pt) |
| EP (1) | EP1892170B1 (pt) |
| CN (1) | CN101131589B (pt) |
| AR (1) | AR062498A1 (pt) |
| AT (1) | ATE410352T1 (pt) |
| BR (1) | BRPI0702994B8 (pt) |
| DE (1) | DE602007000163D1 (pt) |
| ES (1) | ES2314969T3 (pt) |
| FR (1) | FR2905105B1 (pt) |
| NO (1) | NO340222B1 (pt) |
| SG (1) | SG140565A1 (pt) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2012040163A2 (en) | 2010-09-21 | 2012-03-29 | Ansaldo Sts Usa, Inc. | Method for adjusting braking parameters of a train to account for train characteristic parameter variations |
| US10113877B1 (en) * | 2015-09-11 | 2018-10-30 | Philip Raymond Schaefer | System and method for providing directional information |
| US10328922B2 (en) * | 2016-01-15 | 2019-06-25 | New York Air Brake, LLC | Train brake safety monitoring and fault action system with PTC brake performance assurance |
| US10093331B2 (en) | 2016-08-08 | 2018-10-09 | Mitsubishi Electric Research Laboratories, Inc. | Train automatic stopping control with quantized throttle and braking |
| US10279823B2 (en) * | 2016-08-08 | 2019-05-07 | General Electric Company | System for controlling or monitoring a vehicle system along a route |
| CN109923489B (zh) * | 2017-10-12 | 2022-04-05 | 北京航迹科技有限公司 | 用于制动控制的系统和方法 |
| CN112147966B (zh) * | 2019-06-26 | 2022-08-09 | 比亚迪股份有限公司 | 站台门及其控制方法和控制器、列车 |
| CN110304113B (zh) * | 2019-07-08 | 2021-06-11 | 上海电气泰雷兹交通自动化系统有限公司 | 一种自动调整列车自动驾驶停车精度的方法 |
| DE102020200908A1 (de) * | 2020-01-27 | 2021-07-29 | Robert Bosch Gesellschaft mit beschränkter Haftung | Verfahren zum Regeln einer kinematischen Größe eines Kraftfahrzeugs |
Family Cites Families (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3655962A (en) * | 1969-04-01 | 1972-04-11 | Melpar Inc | Digital automatic speed control for railway vehicles |
| US3562515A (en) * | 1969-05-14 | 1971-02-09 | Gen Electric | Tapered braking rate for traction vehicles |
| US3808426A (en) * | 1972-05-02 | 1974-04-30 | British Railways Board | Electromagnetic signalling system |
| US3953714A (en) * | 1972-09-22 | 1976-04-27 | Agence Nationale De Valorisation De La Recherche (Anvar) | Method of and means for controlling the movement of self-propelled bodies traveling in a fixed order along a track |
| GB1467250A (en) * | 1973-08-18 | 1977-03-16 | Westinghouse Brake & Signal | Vehicle speed control arrangmenet |
| US3906315A (en) * | 1974-01-15 | 1975-09-16 | Aerojet General Co | Closed-loop, precision-stop induction motor control circuit |
| JPS51132514A (en) * | 1975-04-02 | 1976-11-17 | Hitachi Ltd | Automatic control device for train |
| US4005838A (en) * | 1975-05-27 | 1977-02-01 | Westinghouse Air Brake Company | Station stop and speed regulation system for trains |
| US4005837A (en) * | 1975-05-27 | 1977-02-01 | Westinghouse Air Brake Company | Circuit arrangement for controlling the propulsion, braking and station stopping function for a rapid transit train |
| JPS52101512A (en) * | 1976-02-20 | 1977-08-25 | Hitachi Ltd | Device for controlling operation of vehicle |
| US4208717A (en) * | 1978-06-28 | 1980-06-17 | Westinghouse Electric Corp. | Program stop control of train vehicles |
| US4270716A (en) * | 1979-03-30 | 1981-06-02 | Westinghouse Electric Corp. | Transit vehicle speed control apparatus and method |
| JPS5612801A (en) * | 1979-07-13 | 1981-02-07 | Hitachi Ltd | Method of stopping vehicle in fixed position |
| KR910008882B1 (ko) * | 1982-04-27 | 1991-10-24 | 가부시기가이샤 히다찌세이사꾸쇼 | 정위치 정차방법 및 장치 |
| EP0375553B1 (fr) * | 1988-12-21 | 1995-02-15 | Matra Transport | Installation de transport à commande automatique de déplacement de véhicules |
| JPH04133601A (ja) * | 1990-09-21 | 1992-05-07 | Toshiba Corp | 保安機能付自動運転制御装置 |
| DE4310610A1 (de) * | 1993-03-31 | 1994-10-06 | Siemens Ag | System zur Zielbremsung von Fahrzeugen |
| IT1264912B1 (it) * | 1993-07-09 | 1996-10-17 | Metropolitana Milanese Struttu | Apparato per l'abilitazione dell'apertura di porte di vetture viaggianti su rotaia |
| FR2722894B1 (fr) * | 1994-07-21 | 1996-08-23 | Gec Alsthom Transport Sa | Systeme de pilotage automatique et procede d'elaboration d'une consigne de vitesse dans un tel systeme |
| FR2726380B1 (fr) * | 1994-10-26 | 1996-12-13 | Gec Alsthom Transport Sa | Systeme de traitement des arrets precis, systeme de pilotage automatique comportant un tel systeme et procede d'elaboration de phases d'arrets |
| GB9508681D0 (en) * | 1995-04-28 | 1995-06-14 | Westinghouse Brake & Signal | Vehicle control system |
| JP3314686B2 (ja) * | 1997-09-18 | 2002-08-12 | トヨタ自動車株式会社 | 車両最短停止距離予測方法および車両最短停止距離予測装置 |
| JP3827296B2 (ja) * | 2002-01-31 | 2006-09-27 | 株式会社東芝 | 自動列車運転装置 |
| TWI282047B (en) * | 2003-07-23 | 2007-06-01 | Murata Machinery Ltd | Carrying vehicle system and carrying vehicle |
| TWI290272B (en) * | 2004-03-12 | 2007-11-21 | Murata Machinery Ltd | Moving body system |
| US8224237B2 (en) * | 2004-04-26 | 2012-07-17 | General Electric Company | Method and apparatus related to on-board message repeating for vehicle consist communications system |
| TW200736870A (en) * | 2005-11-04 | 2007-10-01 | Murata Machinery Ltd | Control device for movable body |
-
2006
- 2006-08-25 FR FR0607537A patent/FR2905105B1/fr not_active Expired - Fee Related
-
2007
- 2007-07-25 BR BRPI0702994A patent/BRPI0702994B8/pt active IP Right Grant
- 2007-08-16 EP EP07291017A patent/EP1892170B1/fr active Active
- 2007-08-16 DE DE602007000163T patent/DE602007000163D1/de active Active
- 2007-08-16 AT AT07291017T patent/ATE410352T1/de active
- 2007-08-16 ES ES07291017T patent/ES2314969T3/es active Active
- 2007-08-23 US US11/895,140 patent/US8224511B2/en not_active Expired - Fee Related
- 2007-08-23 AR ARP070103746A patent/AR062498A1/es active IP Right Grant
- 2007-08-23 SG SG200706166-6A patent/SG140565A1/en unknown
- 2007-08-23 NO NO20074309A patent/NO340222B1/no not_active IP Right Cessation
- 2007-08-24 CN CN2007101476142A patent/CN101131589B/zh not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| SG140565A1 (en) | 2008-03-28 |
| FR2905105A1 (fr) | 2008-02-29 |
| EP1892170B1 (fr) | 2008-10-08 |
| AR062498A1 (es) | 2008-11-12 |
| NO20074309L (no) | 2008-02-26 |
| ATE410352T1 (de) | 2008-10-15 |
| ES2314969T3 (es) | 2009-03-16 |
| CN101131589A (zh) | 2008-02-27 |
| EP1892170A1 (fr) | 2008-02-27 |
| US8224511B2 (en) | 2012-07-17 |
| BRPI0702994A8 (pt) | 2016-08-16 |
| HK1111482A1 (en) | 2008-08-08 |
| BRPI0702994B8 (pt) | 2018-11-13 |
| BRPI0702994A (pt) | 2008-04-22 |
| CN101131589B (zh) | 2011-04-27 |
| FR2905105B1 (fr) | 2008-11-21 |
| DE602007000163D1 (de) | 2008-11-20 |
| US20080051969A1 (en) | 2008-02-28 |
| NO340222B1 (no) | 2017-03-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| BRPI0702994B1 (pt) | dispositivo de comando regulado de parada de precisão destinado a um veículo com pilotagem automática e processo de comando regulado de parada de precisão de veículos | |
| US10370016B2 (en) | Method and device for carrying out a test process relating to a rail vehicle | |
| US9689681B2 (en) | System and method for vehicle operation | |
| CN111413103B (zh) | 车辆工况自动测试系统及其测试方法 | |
| CN110361763A (zh) | 卫星支持地测定车辆位置的方法 | |
| BR102015003620A2 (pt) | sistema de operação de trem automático | |
| WO2017090504A1 (ja) | ブレーキ制御装置、ブレーキ制御方法、列車、及びプログラム | |
| CA3165439A1 (en) | Controller, control system and method for vehicle control | |
| CN113844457A (zh) | 用于车辆能量管理的方法和设备 | |
| van Nunen et al. | Fault tolerancy in cooperative adaptive cruise control | |
| CN101221414A (zh) | 一种基于积分器的控制律平稳切换方法 | |
| CN112666995A (zh) | 无人机的速度规划方法、装置、设备及存储介质 | |
| KR20190036288A (ko) | 패싱 백 방식을 이용한 자율주행 열차의 운행 제어 장치 및 방법 | |
| CN112596374A (zh) | 电子调速器的调节性能优化及状态监测系统、方法 | |
| US20110290947A1 (en) | Automatic Method And Device For Aiding The Piloting Of An Airplane | |
| CN118220286A (zh) | 调整列车区间运行时间的方法、装置、列车及存储介质 | |
| CN112874576A (zh) | 列车参数自动化调整方法和车载控制器 | |
| JP5914374B2 (ja) | 自動列車運転装置 | |
| CN109501601B (zh) | 高空剪叉车制动控制方法、装置及高空剪叉车 | |
| US20240313575A1 (en) | Building energy management system | |
| US12486142B2 (en) | Monitoring objects in an elevator shaft using an UAV | |
| Baranov et al. | Optimal control of a subway train with regard to the criteria of minimum energy consumption | |
| CN104022512A (zh) | 基于响应信息的电力系统紧急控制方法 | |
| CN112590748B (zh) | 一种地铁车辆空气制动补充方法及装置 | |
| JP5433747B2 (ja) | 列車制御装置および列車制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| B25A | Requested transfer of rights approved |
Owner name: ALSTOM TRANSPORT TECHNOLOGIES (FR) |
|
| B25G | Requested change of headquarter approved |
Owner name: ALSTOM TRANSPORT TECHNOLOGIES (FR) |
|
| B06A | Patent application procedure suspended [chapter 6.1 patent gazette] | ||
| B09A | Decision: intention to grant [chapter 9.1 patent gazette] | ||
| B16A | Patent or certificate of addition of invention granted [chapter 16.1 patent gazette] |
Free format text: PRAZO DE VALIDADE: 10 (DEZ) ANOS CONTADOS A PARTIR DE 30/10/2018, OBSERVADAS AS CONDICOES LEGAIS. |
|
| B16C | Correction of notification of the grant [chapter 16.3 patent gazette] |
Free format text: PRAZO DE VALIDADE: 10 (DEZ) ANOS CONTADOS A PARTIR DE 30/10/2018, OBSERVADAS AS CONDICOES LEGAIS. (CO) REF. RPI 2495 DE 30/10/2018 QUANTO AO COD. (73) ENDERECO. |
|
| B25A | Requested transfer of rights approved |
Owner name: ALSTOM HOLDINGS (FR) |