BRPI0803640B1 - dispositivo de acionamento de roletes descascadores em um descascador de arroz - Google Patents
dispositivo de acionamento de roletes descascadores em um descascador de arroz Download PDFInfo
- Publication number
- BRPI0803640B1 BRPI0803640B1 BRPI0803640-3A BRPI0803640A BRPI0803640B1 BR PI0803640 B1 BRPI0803640 B1 BR PI0803640B1 BR PI0803640 A BRPI0803640 A BR PI0803640A BR PI0803640 B1 BRPI0803640 B1 BR PI0803640B1
- Authority
- BR
- Brazil
- Prior art keywords
- large diameter
- diameter pulley
- drive system
- pulley
- endless belt
- Prior art date
Links
- 235000007164 Oryza sativa Nutrition 0.000 title claims description 13
- 235000009566 rice Nutrition 0.000 title claims description 13
- 240000007594 Oryza sativa Species 0.000 title claims 2
- 230000007246 mechanism Effects 0.000 claims abstract description 57
- 230000005540 biological transmission Effects 0.000 claims abstract description 29
- 230000008602 contraction Effects 0.000 claims description 12
- 230000001360 synchronised effect Effects 0.000 claims description 3
- 230000000977 initiatory effect Effects 0.000 claims 1
- 241000209094 Oryza Species 0.000 description 11
- 230000002093 peripheral effect Effects 0.000 description 7
- 235000013339 cereals Nutrition 0.000 description 5
- 238000006880 cross-coupling reaction Methods 0.000 description 3
- 238000004519 manufacturing process Methods 0.000 description 2
- 235000014676 Phragmites communis Nutrition 0.000 description 1
- 230000004913 activation Effects 0.000 description 1
- 239000013065 commercial product Substances 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 239000010903 husk Substances 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 238000000034 method Methods 0.000 description 1
- 238000011017 operating method Methods 0.000 description 1
Images


Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B02—CRUSHING, PULVERISING, OR DISINTEGRATING; PREPARATORY TREATMENT OF GRAIN FOR MILLING
- B02B—PREPARING GRAIN FOR MILLING; REFINING GRANULAR FRUIT TO COMMERCIAL PRODUCTS BY WORKING THE SURFACE
- B02B3/00—Hulling; Husking; Decorticating; Polishing; Removing the awns; Degerming
- B02B3/04—Hulling; Husking; Decorticating; Polishing; Removing the awns; Degerming by means of rollers
Landscapes
- Adjustment And Processing Of Grains (AREA)
- Devices For Conveying Motion By Means Of Endless Flexible Members (AREA)
- Perforating, Stamping-Out Or Severing By Means Other Than Cutting (AREA)
- Threshing Machine Elements (AREA)
Abstract
DISPOSITIVO DE ACIONAMENTO DE ROLETES DESCASCADORES EM UM DESCASCADOR. A presente invenção refere-se a um mecanismo de embreagem da primeira correia que troca a transmissão de força para uma primeira polia de grande diâmetro e, ao mesmo tempo, a um mecanismo de embreagem da segunda correia que troca a transmissão de força para uma segunda polia de grande diâmetro, e os mecanismos de embreagem da primeira e segunda correias são munidos de um primeiro e segundo membros de braços, polias de embreagem de tensão e atuadores que giram o primeiro e segundo membros de braços de modo que uma posição na qual a primeira correia sem fim envolve a primeira polia de grande diâmetro é trocada para uma posição na qual o envolvimento é evitado e, ao mesmo tempo, uma posição na qual a segunda correia sem fim envolve uma segunda polia de grande diâmetro é trocada para uma posição na qual o envolvimento é evitado.
Description
[001] A presente invenção refere-se a um descascador pelo qual se removem as cascas de arroz em casca e se recupera arroz não- polido, e, principalmente, a um par de dispositivos de acionamento de roletes descascadores com uma operação (de descascamento) na qual as cascas são retiradas do arroz em casca.
[002] Há um tipo de descascador em que dois roletes de borracha são respectivamente girados em sentido contrário um ao outro e com velocidade periférica diferente da do outro; o arroz em casca é alimentado a uma abertura entre o par de roletes de borracha supramencionado, e a fratura por cisalhamento das cascas é realizada pela diferença das velocidades periféricas entre os roletes para remoção das cascas.
[003] O par de roletes de borracha é constituído por um rolete principal e um rolete secundário; porém, os desgastes do rolete principal e do rolete secundário são diferentes um do outro (um desvio é gerado) devido à diferença entre a velocidade periférica do rolete principal e a do rolete secundário. Portanto, os níveis de desgaste geralmente são equilibrados pela operação de substituição manual dos roletes de borracha principal e secundário. O tempo de vida dos roletes principal e secundário é prolongado graças a essas operações e o referido descascador se torna excelente do ponto de vista econômico.
[004] No entanto, as operações citadas, em que os roletes principal e secundário são substituídos manualmente, são desvantajosas, pois tais operações incluem parar o descascador, entre outras coisas. Por esse motivo, foi proposta uma tecnologia que possibilitasse omitir as operações de substituição dos roletes principal e secundário. Por exemplo, o descascador descrito na Publicação do Pedido de Modelo de Utilidade Japonês Examinado No. 62-29064, na Publicação em Trâmite do Pedido de Patente Japonês No. 03-137945 e na Publicação em Trâmite do Pedido de Patente Japonês No. 2001-38230 tem uma configuração em que os motores de velocidade variável são respectivamente conectados de forma direta ao rolete principal e ao rolete secundário, acionados de forma independente para serem girados um na direção oposta ao e, em intervalos de tempo regulares, trocados de um lado em alta velocidade para um lado em baixa velocidade e de um lado em baixa velocidade para um lado em alta velocidade. Dessa forma, os roletes principal e secundário se desgastam na mesma proporção, pois, em intervalos de tempo regulares, os roletes são girados alternadamente em baixa e alta velocidade.
[005] No entanto, no descascador descrito na Publicação em Trâmite da Patente do Pedido de Patente Japonês No. 03-106452 ou na Publicação em Trâmite da Patente do Pedido de Patente Japonês No. 2006312151, a troca dos membros giratórios dos roletes principal e secundário é realizada por um mecanismo de engrenagem de mudança e/ou um mecanismo de embreagem.
[006] De acordo com o mecanismo de engrenagem de mudança, engrenagens de mudança grande e pequena fixadas em um eixo de acionamento são engatadas seletivamente a engrenagens passivas fixadas nos eixos de rotação dos roletes principal e secundário. Para o engate seletivo, o eixo de acionamento, no qual as caixas de câmbio são fixadas, precisa ser movido na direção axial.
[007] O mecanismo de embreagem usa membros de embreagem instalados nos eixos de rotação dos roletes principal e secundário. Os membros de embreagem podem mover-se nas direções dos eixos de rotação e são limitados nas direções das rotações, respectivamente. Então, as polias grande e pequena são acionadas por uma correia em ambos os lados dos referidos membros de embreagem e os membros de embreagem podem ser seletivamente conectados às referidas polias. Os membros de embreagem movem-se para os eixos de rotação do rolete principal e do sub-rolete ao mesmo tempo e, quando o rolete principal é conectado à polia grande, o rolete secundário é conectado à polia pequena, ou vice-versa. Esse mecanismo também precisa ter uma configuração na qual o membro de embreagem mova- se ao longo do eixo de rotação.
[008] Uma vez que os dispositivos supramencionados são configurados de modo que um rolete de borracha desgastado pela alta velocidade seja girado em baixa velocidade e um rolete de borracha não- desgastado pela baixa velocidade seja girado em alta velocidade pela operação do mecanismo de engrenagem de mudança, ou mecanismo de embreagem, por fora da máquina ainda durante a operação de descascamento por um método rápido, o trabalho que geralmente se tem com a substituição dos roletes pode ser evitado.
[009] No entanto, o descascador descrito na Publicação do Pedido de Modelo de Utilidade Japonês Utilizado No. 62-29064, na Publicação em Trâmite do Pedido de Patente Japonês No. 03-137945 e na Publicação em Trâmite do Pedido de Patente Japonês No. 2001-38230 supramencionadas tem a tendência de entrar em sobrecarga de operação, pois os motores de acionamento são conectados diretamente ao eixo de rotação do rolete de borracha do lado em baixa velocidade e ao do rolete de borracha do lado em alta velocidade, respectivamente. Em suma, a abertura entre os roletes principal e secundário é configurada para assegurar uma pressão de contato apropriada gerada entre a superfície da abertura do rolete e o arroz em casca de modo a obter uma velocidade de descascamento predeterminada (um número de arroz não-polido para todos os números de arroz em casca adicionados). Já que, neste momento, ambos os roletes de borracha constituem um corpo visco elástico, gera-se uma pressão máxima um tanto no lado frontal da parte mais estreita da abertura do rolete quando o arroz em casca atravessa a abertura dos roletes. O descascador descrito na Publicação do Pedido de Modelo de Utilizado Japonês Examinado 62-29064, na Publicação em Trâmite do Pedido de Patente Japonês 03-137945 e na Publicação em Trâmite do Pedido de Patente Japonês No. 2001-38230 necessita de uma alta força de acionamento giratório para superar a pressão supramencionada. Por esse motivo, vem ocorrendo o problema de que os motores de acionamento são sempre acionados em condição sobrecarregada. Entretanto, o descascador descrito na Publicação do Pedido de Modelo de Utilizado Japonês Examinado 62-29064, na Publicação em Trâmite do Pedido de Patente Japonês 03-137945 e na Publicação em Trâmite do Pedido de Patente Japonês No. 2001-38230 tem o mérito de que as forças de repulsão de um par de roletes são controladas quando o arroz em casca passa através da abertura do rolete e de que uma força excessiva de acionamento giratório não precisa ser aplicada a cada um dos motores de acionamento, pois uma correia sem fim envolve a polia do eixo de rotação do rolete de borracha do lado em alta velocidade e a do eixo de rotação do rolete de borracha do lado em baixa velocidade como um acoplamento cruzado.
[0010] No entanto, mesmo o descascador descrito na Publicação em Trâmite do Pedido de Patente 03-106452 ou na Publicação em Trâmite do Pedido de Patente 2006-312151 apresenta os problemas a seguir. Por exemplo, quando a quantidade alimentada de arroz em casca é aumentada, a carga aplicada a um dos roletes de borracha é aumentada, ou seja, a carga sobre o eixo de rotação de um dos roletes de borracha é aumentada e a forma axial do eixo de rotação é alterada pela expansão térmica, dentre outros fatores. Sendo assim, há o risco de que a operação de troca seja dificultada quando a abertura entre o rolete principal e o rolete secundário é ajustada de forma a ser maior, ou mais estreita, uma vez que os movimentos das engrenagens da mudança e do membro de embreagem estarão em más condições para movimento na direção do eixo de rotação.
[0011] A presente invenção refere-se a um dispositivo de acionamento de roletes descascadores em um descascador. A presente invenção tem como objetivo técnico que não seja necessária uma grande força de rotação parecida com a do descascador, no qual o motor de acionamento é diretamente conectado ao eixo de rotação, e que mesmo quando a expansão térmica provoque deformações nos eixos de rotação dos roletes principal e secundário, a troca dos lados de rotação em alta velocidade dos roletes principal e secundário para o lado em rotação de baixa velocidade, e a troca do lado de rotação em baixa velocidade para o lado de rotação em alta velocidade possa ser realizada de forma alternada e prática.
[0012] O descascador, de acordo com a presente invenção, é munido de um rolete principal e um rolete secundário, que são girados na direção interna e a diferentes números de rotações em relação um ao outro; um primeiro sistema de acionamento, em que um dentre os roletes principal e secundário é girado a uma velocidade mais elevada e o outro é girado a uma velocidade menos elevada; um segundo sistema de acionamento, em que um dentre os roletes principal e secundário é girado a uma velocidade menor e o outro é girado a uma velocidade maior; mecanismos de embreagem da primeira e da segunda correia, nos quais a força é transmitida ao rolete principal e ao rolete secundário pela alternância dos referidos sistemas de acionamento; e atuadores que acionam os mecanismos de embreagem das correias.
[0013] Os roletes principal e secundário formam um par de roletes descascadores. Além disso, as palavras "principal e secundário" são usadas somente para distinguir entre os dois roletes, sendo que não há distinção quanto ao desempenho dos roletes.
[0014] Uma primeira polia de grande diâmetro é axialmente suportada em um dos eixos de rotação dos roletes principal e secundário e uma primeira polia pequeno diâmetro é axialmente suportada pelo outro eixo de rotação, respectivamente.
[0015] O primeiro sistema de acionamento inclui: uma primeira polia de diâmetro grande; uma primeira polia de diâmetro pequeno; uma polia de acionamento do primeiro motor; e uma primeira correia sem fim que é estirada entre as polias supramencionadas e conecta os componentes supramencionados.
[0016] O segundo sistema de acionamento inclui: uma segunda polia de pequeno diâmetro que é axialmente suportada sobre um dos eixos de rotação supramencionados; uma segunda polia de grande diâmetro que é axialmente suportada sobre o outro eixo de rotação supramencionado; uma polia de acionamento de um segundo motor; e uma segunda correia sem fim que é estirada entre as polias supramencionadas e conecta os componentes supramencionados.
[0017] Um mecanismo de embreagem da primeira correia é munido de um primeiro membro de braços e um atuador.
[0018] O primeiro membro de braços é munido de uma polia de embreagem de tensão na parte de extremidade de um braço projetando-se na direção radial. O primeiro membro de braços é girado ao redor do outro eixo de rotação pelo atuador. Quando o primeiro braço é girado, a energia é alimentada ou cortada da primeira polia de grande diâmetro no primeiro sistema de acionamento.
[0019] O mecanismo de embreagem da segunda correia é munido do segundo membro de braços e de um atuador à maneira do mecanismo de embreagem da primeira correia. O segundo membro de braços é munido de uma polia de embreagem de tensão na parte de extremidade de um braço projetando-se na direção radial. O segundo membro de braços é girado pelo atuador ao redor do outro eixo de rotação. Quando o braço é girado, a energia é alimentada ou cortada da segunda polia de grande diâmetro no segundo sistema de acionamento.
[0020] O primeiro membro de braços e o segundo membro de braços são girados pelo atuador ao mesmo tempo.
[0021] O mecanismo de embreagem da primeira correia realiza a troca entre uma posição na qual a primeira correia sem fim do primeiro sistema de acionamento é envolvida na primeira polia de grande diâmetro e uma posição na qual o envolvimento é evitado. Ao mesmo tempo, o mecanismo de embreagem da segunda correia realiza a troca entre uma posição na qual o envolvimento da segunda correia sem fim do segundo sistema de acionamento ao redor da segunda polia de grande diâmetro é evitado e uma posição na qual a segunda correia sem fim envolve a segunda polia de grande diâmetro.
[0022] Ou seja, quando a primeira correia sem fim envolve a primeira polia de grande diâmetro e a força é transmitida à primeira polia de grande diâmetro, o envolvimento da segunda correia sem fim ao redor da segunda polia de grande diâmetro é evitado e a força não pode ser transmitida à segunda polia de grande diâmetro. Por outro lado, quando a primeira correia sem fim transmite força à primeira polia de grande diâmetro axialmente suportada por um dos eixos de rotação, a força também é transmitida à primeira polia de pequeno diâmetro, que é axialmente suportada pelo outro eixo. De maneira oposta, quando a segunda correia sem fim transmite força à segunda polia de grande diâmetro axialmente suportada sobre o outro eixo de rotação, a força também é transmitida à segunda polia de pequeno diâmetro axialmente suportada pelo primeiro eixo de rotação. Dessa forma, os roletes principal e secundário são girados ao mesmo tempo com diferentes velocidades e a troca entre o lado de rotação em alta velocidade e o lado de rotação em baixa velocidade é realizada.
[0023] O primeiro membro de braços inclui uma parte de extremidade de suporte que é rotativamente instalada em um dos eixos de rotação; e uma parte de braços com formato parecido com o da a letra V estendendo-se na direção radial da primeira polia de grande diâmetro a partir da parte de extremidade de suporte. Na parte de braços com formato parecido com a letra V, é preferível pressupor que o ângulo inferior (a) seja 60°.
[0024] De maneira similar, o segundo membro de braços inclui uma parte de extremidade de suporte que é rotativamente instalada sobre o outro eixo de rotação; e uma parte de braços com formato parecido com o da a letra V estendendo-se a partir da parte de extremidade de suporte na direção radial da segunda polia de grande diâmetro. Na parte de braços com formato parecido com o da a letra V, é preferível pressupor que o ângulo inferior (a) seja 60°.
[0025] O atuador pode ser concebido como um atuador giratório que gira o primeiro membro de braços e o segundo membro de braços, respectivamente.
[0026] O atuador inclui ainda um mecanismo de transmissão por roda dentada e corrente.
[0027] Um mecanismo de transmissão por roda dentada e corrente é munido de uma primeira roda dentada fixada no primeiro membro de braços; uma segunda roda dentada fixada no segundo membro de braços; uma roda dentada dupla conectando a primeira e a segunda roda dentada; e um atuador tipo haste. Em seguida, uma corrente é engrenada entre a primeira roda dentada e a roda dentada dupla e entre a segunda roda dentada e a roda dentada dupla, respectivamente. A roda dentada dupla é disposta de modo que a roda dentada seja girada em torno de 90 graus por um atuador tipo haste.
[0028] Quando a roda dentada dupla é girada, o primeiro e segundo membro de braços são girados de forma síncrona. Em seguida, quando a correia sem fim do referido primeiro sistema de acionamento está em uma posição na qual a correia sem fim é envolvida ao redor da referida primeira polia de grande diâmetro, tornando-se possível transmitir força, pressupõe-se que a correia sem fim do referido segundo sistema de acionamento esteja em uma posição na qual o envolvimento ao redor da referida segunda polia de grande diâmetro é evitado. Assim como quando a correia sem fim do referido segundo sistema de acionamento está em uma posição na qual a correia sem fim é envolvida ao redor da referida segunda polia de grande diâmetro e a força pode ser transmitida, pressupõe-se que a correia sem fim do referido primeiro sistema de acionamento esteja em uma posição na qual o envolvimento ao redor da referida primeira polia de grande diâmetro é evitado.
[0029] Em alguns casos, utiliza-se um invólucro no qual é disposta uma primeira polia intermediária, que confere contração e expansão à correia sem fim supramencionada pela contração e expansão de um cilindro de ar, no primeiro sistema de acionamento, uma segunda polia intermediária e uma terceira polia intermediária, as quais conferem contração e expansão à correia sem fim supramencionada pela expansão e contração de um cilindro de ar, no segundo sistema de acionamento.
[0030] Conforme descrito acima, a presente invenção tem uma configuração na qual, em vez de uma embreagem ser movida para trás e para frente na direção do eixo de rotação dos roletes principal e secundário convencionais, as operações do primeiro sistema de acionamento e do segundo sistema de acionamento são alternadas pela rotação do primeiro membro de braços e do segundo membro de braços. Com isso, mesmo que a expansão térmica etc. provoque deformações no eixo de rotação, é possível executar com facilidade uma operação de troca na qual o lado em alta velocidade passa para o lado em baixa velocidade e o lado em baixa velocidade passa para o lado em alta velocidade, alternadamente. Além disso, visto que a presente invenção não utiliza peças tal como um membro de embreagem, que desliza na direção do eixo de rotação, e que, a cada operação, gera facilmente impacto e desgaste, a invenção apresenta excelente durabilidade, embora a operação de troca para o mecanismo de embreagem da correia e a polia intermediária seja realizada repetidamente.
[0031] Quando as partes de braços do primeiro e segundo de braços têm o formato parecido com a letra V com um ângulo interno (a) de aproximadamente 60°, o espaçamento entre um par de polias de embreagem de tensão, que são instaladas nas partes de extremidade do primeiro e segundo membros de braço, se torna um tanto maior. Com isso, por exemplo, em uma condição em que a transmissão de força à primeira polia de grande diâmetro e à segunda polia de grande diâmetro é liberada, mesmo no caso em que os diâmetros externos dessas polias são grandes, por exemplo, de aproximadamente 220 mm, uma condição em que a primeira e segunda correias sem fim envolvem-se de maneira inesperada ao redor das polias supramencionadas, e a força transmitida é claramente interrompida e as operações de "LIGAR" e "DESLIGAR" são executadas com êxito.
[0032] Já que o atuador giratório tem um torque elevado e a parte de braços pode lidar com um grande ângulo de rotação quando o primeiro e segundo membros de braços são girados por um atuador giratório, as operações de "LIGAR" e "DESLIGAR" podem ser executadas com segurança.
[0033] Quando um cilindro de ar tipo haste e um mecanismo de transmissão de rodas dentadas e correntes são usados para rotação do primeiro e segundo membros de braços, as operações dos mecanismos de embreagem das correias no primeiro sistema de acionamento e no segundo sistema de acionamento podem ser sincronizados com facilidade por um cilindro de ar; além disso, em comparação com um invólucro no qual vários atuadores giratórios são usados, os custos de fabricação podem ser reduzidos com uma configuração simples, pois uma válvula eletromagnética, um relé lógico e similares não são necessários para a sincronização entre o primeiro e o segundo sistema de acionamento.
[0034] A primeira polia intermediária do primeiro sistema de acionamento e a segunda polia intermediária do segundo sistema de acionamento realizam a contração e expansão da primeira e segunda correias sem fim pela expansão e contração do cilindro de ar, respectivamente. Portanto, a contração e expansão da primeira e segunda correias sem fim podem ser realizadas com facilidade pela simples expansão e contração de um cilindro de ar. Como conseqüência, as operações de "LIGAR" e "DESLIGAR" para a transmissão de força à primeira e segunda polias de grande diâmetro podem ser executadas com facilidade pelos mecanismos de embreagem da primeira e segunda correias.
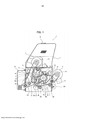
[0035] A FIG. 1 é uma vista lateral ilustrando uma vista geral de um dispositivo de acionamento de roletes descascadores, de acordo com a presente invenção;
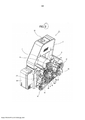
[0036] A FIG. 2 é uma vista em perspectiva do dispositivo de acionamento de roletes descascadores, de acordo com a presente invenção, visto obliquamente de cima;
[0037] A FIG. 3 é uma vista em perspectiva ilustrando uma estrutura detalhada do mecanismo de embreagem da correia no primeiro sistema de acionamento;
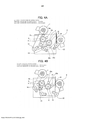
[0038] A FIG. 4 é uma vista esquemática ilustrando as respectivas condições de operação do primeiro sistema de acionamento e do segundo sistema de acionamento;
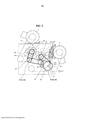
[0039] A FIG. 5 é uma vista lateral esquemática ilustrando um mecanismo de transmissão de rodas dentadas e correntes para girar um membro de braços; e
[0040] A FIG. 6 é uma vista esquemática explicativa ilustrando a relação entre uma correia e rodas dentadas vista da direção da seta A da FIG. 5.
[0041] A melhor maneira de pôr em prática a presente invenção será explicada com referência aos desenhos. A FIG. 1 é uma vista lateral ilustrando uma vista geral de um dispositivo de acionamento de roletes descascadores, de acordo com a presente invenção; A FIG. 2 é uma vista em perspectiva do dispositivo de acionamento de roletes descascadores, de acordo com a presente invenção, visto obliquamente de cima; Nas FIGs. 1 e 2, um descascador 1 é munido de um rolete principal 3 (rolete descascador) fixado em um eixo rotativo 5 na parte inferior da estrutura do dispositivo 2 e um rolete secundário 4 (rolete descascador) fixado no outro eixo rotativo 6 e axialmente suportado pelo rolete principal 3 de modo que seja possível executar ajustes de distância (perto-longe). Os roletes principal 3 e secundário 4 são dispostos de modo que os roletes são girados em direção um ao outro e a diferentes números de rotações um do outro.
[0042] Há também um primeiro motor de acionamento 7 na parte central da estrutura do dispositivo 2 e um segundo motor de acionamento 8 na superfície lateral da estrutura do dispositivo 2, respectivamente, que serão descritos doravante. Além disso, uma primeira polia de grande diâmetro 9 é fixada próxima ao exterior da direção axial de um primeiro eixo de rotação 5 supramencionado e uma primeira polia de pequeno diâmetro 10 é fixada próxima ao exterior da direção axial do outro eixo de rotação 6, respectivamente. Seguidamente, a primeira correia sem fim 13 é enrolada entre a primeira polia de grande diâmetro 9, a primeira polia de pequeno diâmetro 10, a polia de acionamento 11 do motor de acionamento 7 e a primeira polia intermediária 12 disposta na parte inferior da estrutura do dispositivo 2 supramencionado para conectá-las uma à outra e, assim, formar o primeiro sistema de acionamento. A primeira correia sem fim 13 do referido primeiro sistema de acionamento, é envolvida em acoplamento cruzado de modo que a primeira polia de grande diâmetro 9 e a primeira polia de pequeno diâmetro 10 sejam giradas na direção para dentro e é envolvida na primeira polia de grande diâmetro 9 na parte de trás da correia e, ao mesmo tempo, na primeira polia de pequeno diâmetro 10 na parte interna da correia. Na FIG. 1, a primeira correia sem fim 13 é disposta de modo que a correia é girada no sentido anti-horário.
[0043] Além disso, um primeiro membro de braços 16 munido da parte de braços com formato parecido com a letra V é disposto na primeira polia de grande diâmetro 9 deste primeiro sistema de acionamento.
[0044] A parte de braços é estendida a partir do centro da primeira polia de grande diâmetro 9 na direção radial e a extremidade é girada ao redor do primeiro eixo de rotação 5 de modo que uma trilha de rotação seja delineada sobre a periferia externa da polia de grande diâmetro 9. Quando esse membro de braços 16 é girado como em uma operação, a energia é cortada da primeira polia de grande diâmetro 9 da primeira correia sem fim 13. Ou seja, o mecanismo de embreagem da primeira correia 15 inclui o membro de braços 16 e a primeira correia sem fim 13. Os símbolos 14a e 14b indicam um par de polias de embreagem de tensão instaladas nas extremidades do membro de braços 16 supramencionado. Conforme ilustrado nas FIGs. 1 e 2, a posição da linha sólida do mecanismo de embreagem da primeira correia 15 é uma posição em que a força é transmitida envolvendo a correia sem fim 13 na polia de grande diâmetro 9 para transmissão de força. Sendo assim, a condição é de "LIGADA".
[0045] O primeiro sistema de acionamento é munido da primeira polia intermediária 12. A primeira polia intermediária 12 pode ser girada em torno de um fulcro 12b para a posição (símbolo 12a) da linha pontilhada e tracejada por meio da expansão e contração do eixo geométrico móvel de um cilindro de ar 17.
[0046] O mecanismo de embreagem da primeira correia 15 do primeiro sistema de acionamento pode ser girado para a posição da linha pontilhada e tracejada ao redor do primeiro eixo de rotação 5 por um atuador giratório 30a ilustrado na FIG. 3. A posição da linha pontilhada e tracejada ilustra que a primeira correia sem fim 13 está na posição em que o envolvimento ao redor da polia de grande diâmetro 9 é evitado e a condição é de "DESLIGADA".
[0047] No primeiro eixo de rotação 5 supramencionado e no outro eixo de rotação 6, a segunda polia de pequeno diâmetro 19 é fixada no lado interno na direção axial adjacente à primeira polia de grande diâmetro 9 e a segunda polia de grande diâmetro 20 é fixada no lado interno na direção axial adjacente à primeira polia de pequeno diâmetro 10 supramencionada. Então, a segunda correia sem fim 24 é enrolada entre a segunda polia de pequeno diâmetro 19, a segunda polia de grande diâmetro 20, a polia de acionamento 21 do segundo motor de acionamento 8, a segunda polia intermediária 22 instalada na parte inferior da estrutura do dispositivo 2 supramencionado e a terceira polia intermediária 23 para conectá-las umas às outras. O segundo sistema de acionamento inclui a segunda correia sem fim 24 e as referidas polias 20 a 23.
[0048] De modo que a segunda polia de pequeno diâmetro 19 e a segunda polia de grande diâmetro 20 sejam giradas mútua e internamente, a segunda correia sem fim 24 do segundo sistema de acionamento envolve a segunda polia de pequeno diâmetro 19 no lado interno da correia e, ao mesmo tempo, é envolvida em acoplamento cruzado ao redor da segunda polia de grande diâmetro 20 na parte de trás da correia. Na FIG. 1, a segunda correia sem fim 24 é configurada para ser girada no sentido horário.
[0049] Além disso, o segundo membro de braços 27 com formato parecido com a letra V é disposto na segunda polia de grande diâmetro 20 do referido segundo sistema de acionamento de modo que uma trilha de rotação seja delineada ao redor do outro eixo de rotação 6 na periferia externa da polia de grande diâmetro 20 pela extremidade da parte de braços. O mecanismo de embreagem da segunda correia 26 é formado pelo segundo membro de braços 27 e a segunda correia sem fim 24. Ou seja, quando o segundo membro de braços 27 é girado, mediante a instrução de um operador, a condição de "LIGADA" ou "DESLIGADA" é executada para a transmissão de força à referida segunda polia de grande diâmetro 20. Os símbolos 25a e 25b indicam um par de polias de embreagem de tensão instaladas na extremidade da parte de braços do segundo membro de braços 27. Aqui, as posições da linha sólida do mecanismo de embreagem da segunda correia 26 ilustradas nas FIGs. 1 e 2 ilustram uma condição em que a transmissão de força à segunda polia de grande diâmetro 20 está na condição de "DESLIGADA".
[0050] A segunda polia intermediária 22 do segundo sistema de acionamento pode ser girada em torno de um fulcro 22b para a posição (símbolo 22a) da linha pontilhada e tracejada por meio da expansão e contração do eixo móvel de um cilindro de ar 28. Ademais, a terceira polia intermediária 23 pode ser girada em torno de um fulcro para a posição (símbolo 23a) da linha pontilhada e tracejada por meio da expansão e contração do eixo móvel de um cilindro de ar 29. Então, o mecanismo de embreagem da segunda correia 26 do segundo sistema de acionamento é configurado para ser girado para a posição da linha pontilhada e tracejada ao redor do outro eixo de rotação 6 por meio de um cilindro de ar (não ilustrado) ou de um atuador giratório 30b ilustrado na FIG. 3. A posição da linha pontilhada e tracejada ilustra a condição em que a transmissão de força para a segunda polia de grande diâmetro está na condição de "LIGADA".
[0051] A FIG. 3 ilustra uma estrutura detalhada do mecanismo de embreagem da primeira correia 15 do primeiro sistema de acionamento descrito acima. A primeira polia de pequeno diâmetro 10 e a primeira polia de grande diâmetro 9 são fixadas no primeiro eixo de rotação 5 do rolete principal 3 e o primeiro membro de braços 16 de formato parecido com a letra V é disposto de modo que o membro 16 fique entre as superfícies finais 9a e 9a da primeira polia de grande diâmetro 9. O diâmetro externo da primeira polia de grande diâmetro 9 é de cerca de 220 mm e o diâmetro externo da polia de pequeno diâmetro 10 é de cerca de 160 mm. No referido primeiro membro de braços 16, a parte de extremidade de suporte 16a é articulada rotativamente em torno do primeiro eixo de rotação 5 por meio de um mancal 28. O pivô é colocado livre para girar. Há também a parte de braços 16b com formato parecido com a letra V que se estende na direção da periferia externa a partir da parte de extremidade de suporte 16a ao longo do raio da primeira polia de grande diâmetro 9. O ângulo interno (a) entre as partes de braços 16b e 16b é de cerca de 60°. Então, são instaladas polias de embreagem de tensão giratórias 14a e 14b nas partes de extremidade 16c e 16c do primeiro membro de braços 16. Com isso, mesmo se a primeira polia de grande diâmetro 9 for uma polia de grande diâmetro, com um diâmetro externo de cerca de 220 mm, a troca entre a condição em que a primeira correia sem fim 13 envolve a primeira polia de grande diâmetro 9 e a condição em que o envolvimento supramencionado é evitado pode ser realizada com êxito pelo mecanismo de embreagem da primeira correia 15. Portanto, as condições de "LIGADA" (com transmissão) e "DESLIGADA" (sem transmissão) podem ser realizadas com êxito em relação à transmissão de força da primeira correia de grande diâmetro 9.
[0052] Além disso, um atuador giratório 30a,30b é instalado no primeiro membro de braços 16 por meio de um suporte 34. No atuador giratório 30a,30b, o primeiro membro de braços 16 é girado na direção de circunferência ao redor do primeiro eixo de rotação 5 pelo deslizamento de uma pá interna (palheta) baseado na pressão atmosférica fornecida por uma tubulação de ar 31. Um produto comercial como o Modelo RAK300 fabricado pela KOGANEI Co. Ltd pode ser usado para o atuador giratório 30a,30b.
[0053] O mecanismo de embreagem da segunda correia 26 do segundo sistema de acionamento tem a mesma configuração ilustrada na FIG. 3, sendo a única diferença a direção de instalação do segundo membro de braços 27.
[0054] Aqui, o símbolo 32 ilustrado nas FIGs. 1 e 2 indica uma porta de alimentação disposta na parte superior da estrutura do dispositivo 2 para a alimentação de grãos. Na estrutura do dispositivo 2, são instalados um alimentador por vibração, logo abaixo da porta de alimentação 32, e um escoadouro para alimentar os grãos entre os roletes principal 3 e secundário 4. O alimentador por vibração pode ajustar a quantidade de fluxo dos grãos.
[0055] O símbolo 33 é um controlador pneumático disposto na parte lateral da estrutura do dispositivo 2. O controlador pneumático 33 fornece ar de alta pressão, fornecido por uma fonte de fornecimento de ar tal como um compressor (não ilustrado), para os respectivos cilindros de ar 17, 28 e 28, para o atuador giratório 30a,30b e assim por diante. Sendo assim, o controlador pneumático 33 inclui: uma válvula eletromagnética; um relé lógico; um disjuntor; uma placa de terminais, entre outros (nenhum deles ilustrado nas figuras). Além disso, o símbolo 18 indica uma unidade de ajuste da abertura de um rolete que ajusta a abertura de um rolete de modo a atingir uma taxa de descascamento predeterminada.
[0056] Doravante, explicaremos os procedimentos de operação para o dispositivo de acionamento de roletes descascadores, de acordo com a presente invenção, com referência à FIG. 4.
[0057] Pressupõe-se que o descascador 1 é munido de roletes principal 3 e secundário 4 (roletes de borracha) novos. O operador ajusta a posição do mecanismo de embreagem da primeira correia 15 e opera a primeira polia intermediária 12 para tensionar a primeira correia sem fim 13. Dessa forma, é obtida uma condição em que a operação de descascamento pode ser iniciada pelo primeiro sistema de acionamento.
[0058] Ou seja, o primeiro atuador giratório 30a é manipulado para girar o primeiro membro de braços 16 de modo que as polias de embreagem de tensão 14a e 14b fiquem em posições representadas pela linha sólida na FIG. 4A. Dessa forma, a condição em que a força é transmitida à primeira polia de grande diâmetro 9 do mecanismo de embreagem da primeira correia 15 é de "LIGADA". Em seguida, o eixo móvel do cilindro de ar 17 é expandido e a primeira polia intermediária 12 é movida para uma posição representada pela linha sólida na FIG. 4A. Logo após, a correia sem fim 13 é esticada e atinge-se a condição em que a força pode ser transmitida da primeira correia sem fim 13 para a primeira polia de grande diâmetro 9.
[0059] Por outro lado, o mecanismo de embreagem da segunda correia 26 não é operado e a condição de transmissão de força da segunda correia sem fim 24 para a segunda polia de grande diâmetro 20 é mantida como "DESLIGADA".
[0060] Sob esta condição, o suprimento de energia do descascador 1 é ligado para dar início ao acionamento do primeiro motor de acionamento 7. O segundo motor de acionamento 8 permanece parado.
[0061] A força de acionamento do primeiro motor de acionamento 7 é transmitida à primeira polia de grande diâmetro 9 e à primeira polia de pequeno diâmetro 10 por meio da primeira correia sem fim 13 do primeiro sistema de acionamento. O rolete principal 3 é girado a um número baixo de rotações e, ao mesmo tempo, o rolete secundário 4 é girado a um número alto de rotações. Ambos os roletes são girados um em direção ao outro.
[0062] A seguir, os grãos fornecidos pela porta de alimentação 32 são submetidos às operações de descascamento pela diferença na velocidade periférica entre os roletes principal 3 e secundário 4 e pela força de pressão.
[0063] Dessa forma, as operações de descascamento continuam sob a condição em que o primeiro sistema de acionamento está na condição de acionamento e o rolete principal 3 e o rolete secundário são desgastados. Visto que o rolete secundário 4 gira a um número maior de rotações em comparação ao rolete principal, que gira a um número baixo de rotações, o rolete secundário 4 possui uma área mais ampla para entrar em contato com o arroz em casca, sendo, portanto, desgastado mais rapidamente do que o rolete principal 3. Em função disso, o diâmetro externo do rolete secundário 4 se torna menor e a diferença na velocidade periférica entre o rolete principal 3 e o rolete secundário 4 é reduzida. Neste momento, por exemplo, quando a diferença na velocidade periférica cai abaixo de um valor fixo de um por cento, ocorre uma operação na qual a unidade de acionamento passa do primeiro sistema de acionamento para o segundo sistema de acionamento.
[0064] Ao trocar do primeiro sistema de acionamento para o segundo sistema de acionamento, em primeiro lugar, o acionamento do primeiro motor de acionamento 7 é interrompido e, então, o cilindro de ar 17 é operado para girar a primeira polia intermediária 12 para cima e a para diminuir a tensão da primeira correia sem fim 13. A seguir, o atuador giratório 30a é manipulado para girar o primeiro membro de braços 16, e as posições das polias de embreagem de tensão 14a e 14b do mecanismo de embreagem da correia 15 são configuradas para ficarem nas posições indicadas pela linha pontilhada na FIG. 4B. Neste momento, o membro de braços 16 é girado em sentido anti-horário em cerca de 175°. Ou seja, o mecanismo de embreagem da primeira correia 15 estabelece a condição de transmissão de força para a primeira polia de grande diâmetro 9 na primeira correia sem fim 13 como "DESLIGADA".
[0065] Além disso, o segundo sistema de acionamento é iniciado pelo mecanismo de embreagem da segunda correia 26, pela segunda polia intermediária 22 e pela terceira polia intermediária 23. Em outras palavras, o segundo atuador giratório 30b é controlado para girar o segundo membro de braços 27. Por meio dessa rotação, as polias de embreagem de tensão 25a e 25b na parte de extremidade da parte de braços 16b vão para as posições indicadas pela linha sólida na FIG. 4B. Nesse caso, o segundo membro de braços 27 é girado no sentido anti-horário em cerca de 175° no desenho. Como resultado, o mecanismo de embreagem da segunda correia 26 estabelece a condição de transmissão de força da segunda correia sem fim 24 para a segunda polia de grande diâmetro 20 como "LIGADA". Então, os eixos móveis dos cilindros de ar 28 e 29 são expandidos, e a segunda polia intermediária 22 e a terceira polia intermediária 23 são movidas para a posição indicada pela linha sólida na FIG. 4B para tensionar a correia sem fim 24.
[0066] Quando o segundo motor de acionamento 8 é acionado sob uma condição (em que o primeiro motor de acionamento é interrompido), a força de acionamento do motor de acionamento 8 é transmitida à segunda polia de grande diâmetro 20 e à segunda polia de pequeno diâmetro 19 por meio da segunda correia sem fim 24 do segundo sistema de acionamento. Diferente das condições supramencionadas, o rolete principal 3 é girado a um número maior de rotações. Ao mesmo tempo, o rolete secundário 4 é girado a um número baixo de rotações, e ambos os roletes são girados em direção um ao outro, voltados um para o outro.
[0067] Conforme descrito acima, as operações do primeiro e segundo motores 7 e 8, os mecanismos de embreagem da primeira e segunda correias 15 e 26 e a primeira, segunda e terceira polias intermediárias 12, 22 e 23 são trocadas para dar prosseguimento à operação de descascamento.
[0068] Neste exemplo, não foi utilizada uma embreagem convencional com estrutura que desliza na direção do eixo de rotação do rolete descascador. Sendo assim, mesmo quando ocorre uma deformação em um dos eixos de rotação, causada pela expansão térmica, as operações de troca alternada, nas quais um rolete girando em alta velocidade passa a girar em baixa velocidade ou vice-versa, podem ser realizadas com êxito. Além disso, o presente exemplo é de durabilidade excelente, pois o presente exemplo não utiliza partes como um membro de embreagem que desliza em direção ao eixo de rotação causando impactos e desgastes a cada operação. Ademais, não é necessária uma grande força de acionamento de rotação, pois a configuração é diferente de uma configuração convencional, na qual um motor de acionamento é conectado diretamente ao eixo de rotação do rolete descascador.
[0069] Agora, explicaremos outro exemplo para um atuador que gira o primeiro e segundo membros de braços 16 e 17. As explicações serão feitas com referência às FIGs. 5 e 6.
[0070] A FIG. 5 é uma vista lateral esquemática ilustrando um mecanismo de transmissão de rodas dentadas e correntes como um atuador que gira o primeiro e segundo membros de braços 16 e 17. A FIG. 6 é uma ilustração esquemática explicativa ilustrando uma conexão entre uma corrente e rodas dentadas vista da direção da seta ao longo da linha A da FIG. 5.
[0071] Com referência às FIGs. 5 e 6, uma primeira roda dentada 50 é fixada na parte de extremidade de suporte 16a, por meio de parafusos, porcas e semelhantes (não ilustrado), no primeiro membro de braços 16 no mecanismo de embreagem da primeira correia 15 do primeiro sistema de acionamento. Uma segunda roda dentada 51 é fixada na parte de extremidade de suporte 27a no segundo membro de braços 27 do mecanismo de embreagem da correia 26 do segundo sistema de acionamento, por meio de parafusos, porcas e seus semelhantes (não ilustrado). Além disso, uma roda dentada dupla 53 para retransmissão é instalada rotativamente sobre um eixo de rotação 52 conectado de forma articulada à estrutura do dispositivo 2 debaixo da primeira roda dentada 50. Além disso, uma roda dentada dupla 55 para sincronização é instalada rotativamente sobre um eixo de rotação 54 conectado de forma articulada à estrutura do dispositivo 2 debaixo da segunda roda dentada 51. Além disso, várias rodas dentadas para tração 56 e 57 são dispostas em locais apropriados correspondendo às rodas dentadas duplas 53 e 55 supramencionadas da estrutura do dispositivo 2.
[0072] Os diâmetros da primeira roda dentada 50, da segunda roda dentada 51 e da roda dentada dupla 53 para retransmissão são de 116 mm com 27 dentes, ao passo que a roda dentada dupla 55 tem diâmetro de 226 mm e 54 dentes. Ademais, a razão de velocidade é de 1:2. Ou seja, a roda dentada dupla 55 é disposta para sincronização na rotação entre a primeira roda dentada 50 e a segunda roda dentada 51 Quando a roda dentada dupla 55 para sincronização é girada em cerca de 90° como um ângulo de rotação, a primeira roda dentada 50, a segunda roda dentada 51 e a roda dentada dupla 53 para retransmissão são ajustadas para serem giradas em cerca de 180° como um ângulo de rotação.
[0073] Uma primeira corrente 58 envolve a roda dentada 55a em um lado da roda dentada dupla 55 para sincronização, a roda dentada 53a em um lado da roda dentada dupla 53 para retransmissão e a roda dentada 57 para tração. De forma semelhante, uma segunda corrente 59 envolve o outro lado 55b da roda dentada 55 para sincronização, a segunda roda dentada 51 e a roda dentada 56 para tração. Uma corrente de transmissão 60 para transmissão de força a uma razão de velocidade igual a 1:1 é enrolada entre o outro lado 53b da roda dentada 53 para retransmissão e a primeira roda dentada 50.
[0074] A roda dentada dupla 55 para sincronização é girada por um cilindro de ar tipo haste 61. Neste cilindro de ar tipo haste 61, uma haste móvel expande-se e contrai-se em uma linha reta e o cilindro pode ser usado como um atuador.
[0075] No cilindro de ar tipo haste 61, uma parte do cilindro 61a é fixada na estrutura do dispositivo 2 por meio de um assento 62. Uma parte de extremidade 61c na parte de haste móvel 61b é conectada de forma articulada à roda dentada dupla 55 para sincronização por meio de um pino pivotante 63. Sendo assim, quando a parte de haste móvel 61b é movida para frente e para trás, a roda dentada dupla 55 para sincronização é configurada para girar. Por exemplo, quando o curso da parte de haste móvel 61b é de cerca de 100 mm, a roda dentada dupla 55 para sincronização pode ser girada a cerca de 90°.
[0076] A partir daqui, explicaremos as operações supramencionadas do mecanismo de transmissão de rodas dentadas e correntes com referência às FIGs. 4, 5 e 6.
[0077] Pressupõe-se uma condição em que os roletes principal 3 e secundário 4 estão instalados no descascador. As operações de descascamento são iniciadas pelo primeiro sistema de acionamento. Ademais, o ajuste da posição dos mecanismos de embreagem da primeira e segunda correias 15 e 16 é realizado simultaneamente.
[0078] Em outras palavras, quando a parte de haste móvel 61b do cilindro de ar tipo haste 61 é estendida (vide FIG. 5), a roda dentada dupla 55 para sincronização é girada no sentido horário em cerca de 90°. Sendo assim, no primeiro sistema de acionamento, por meio da primeira corrente 58 e da corrente de transmissão 60, a roda dentada dupla 53 para retransmissão, a primeira roda dentada 50 e a parte de extremidade de suporte 16a do primeiro membro de braços 16 são giradas em cerca de 180° no sentido horário. Em seguida, as polias de embreagem de tensão 14a e 14b são movidas para uma posição na qual a primeira correia sem fim 13 envolve a primeira polia de grande diâmetro 9. Isso indica que a condição de transmissão de força à primeira polia de grande diâmetro 9 é de "LIGADA".
[0079] Por outro lado, no segundo sistema de acionamento, a parte de extremidade de suporte 27a do segundo membro de braços 27 é girada em cerca de 180° no sentido horário por meio da segunda corrente 59. Logo após, as polias de embreagem de tensão 25a e 25b na extremidade da parte de braços 16b são movidas para uma posição em que se evita que a segunda correia sem fim 24 envolva a segunda polia de grande diâmetro 20. Neste caso, a condição de transmissão de força à segunda polia de grande diâmetro 20 é de "DESLIGADA" (a condição é ilustrada nas FIGs. 4A e 1).
[0080] Quando, sob tal condição, a energia é alimentada ao descascador 1 e dá-se início ao acionamento do primeiro motor de acionamento 7 (o segundo motor de acionamento 8 é interrompido), a energia de acionamento do motor de acionamento 7 é transmitida à primeira polia de grande diâmetro 9 e à primeira polia de pequeno diâmetro 10 por meio da primeira correia sem fim 13 no primeiro sistema de acionamento.
[0081] O rolete principal 3 é girado a um número baixo de rotações e, ao mesmo tempo, o rolete secundário 4 é girado a um número elevado de rotações. Ambos os roletes são girados para dentro, voltados um para o outro.
[0082] A seguir, os grãos fornecidos pela porta de alimentação 32 são submetidos às operações de descascamento pela diferença na velocidade periférica entre os roletes principal 3 e secundário 4 e pela força de pressão.
[0083] Dessa forma, quando as operações de descascamento são continuadas em uma condição na qual o primeiro sistema de acionamento é colocado em condição de acionamento, executa-se uma operação na qual a condição da unidade de acionamento passa do primeiro sistema de acionamento para o segundo sistema de acionamento, pois os roletes principal 3 e secundário 4 são desgastados, conforme descrito acima.
[0084] Quando o rolete secundário 4 é desgastado e o primeiro sistema de acionamento passa para o segundo sistema de acionamento, em primeiro lugar, o acionamento do primeiro motor de acionamento 7 é interrompido e, a seguir, a parte da haste móvel 61b do cilindro de ar tipo haste 61 é recolhida (vide FIG. 5). Logo após, a roda dentada dupla 55 para sincronização é girada em cerca de 90° no sentido anti-horário. Sendo assim, a roda dentada dupla 53 para retransmissão da primeira roda dentada 50 e a parte de extremidade de suporte 16a do primeiro membro de braços 16 são giradas em cerca de 180° no sentido anti-horário por meio da primeira corrente 58 e da corrente de transmissão 60 do primeiro sistema de acionamento; a condição de transmissão de força da primeira correia sem fim 13 à primeira polia de grande diâmetro 9 é de "DESLIGADA". Ao mesmo tempo, no segundo sistema de acionamento, a parte de extremidade de suporte 27a do segundo membro de braços 27 é girada em cerca de 180° no sentido anti-horário por meio da segunda corrente 59 no sentido anti-horário e a condição de transmissão de força da segunda correia sem fim 24 para a segunda polia de grande diâmetro 20 é a condição "LIGADA" (condição ilustrada nas FIGs. 5 e 4B).
[0085] Quando o acionamento do segundo motor de acionamento 8 é iniciado sob uma condição (em que o primeiro motor de acionamento 7 é interrompido), a força de acionamento do segundo motor de acionamento 8 é transmitida à segunda polia de grande diâmetro 20 e à segunda polia de pequeno diâmetro 19 por meio da segunda correia sem fim 24 do segundo sistema de acionamento. Diferente das condições supramencionadas, o rolete principal 4 é girado a um número menor de rotações. Ao mesmo tempo, o rolete principal 3 é girado a um número elevado de rotações, e ambos os roletes são girados para dentro, voltados um para o outro.
[0086] Conforme descrito acima, a operação de descascamento é executada continuamente pela repetição da operação de troca entre os motores, os mecanismos de embreagem das correias e as polias intermediárias. Quando um cilindro de ar tipo haste e um mecanismo de transmissão de rodas dentadas e correntes desse tipo são adotados, os mecanismos de embreagem das correias do primeiro sistema de acionamento e do segundo sistema de acionamento podem ser sincronizados com facilidade por um cilindro de ar. Além disso, em comparação a um invólucro no qual vários atuadores giratórios são usados, os custos de produção podem ser reduzidos com uma configuração simples, pois uma válvula eletromagnética, um relê lógico e seus similares para sincronização não são necessários.
Claims (5)
1. Dispositivo de acionamento de roletes descascadores em um descascador de arroz, compreendendo: um par de roletes descascadores (3,4) que são acionados e girados por um primeiro e um segundo motor, um primeiro sistema de acionamento, um segundo sistema de acionamento, um mecanismo de embreagem da primeira correia (15), e um mecanismo de embreagem da segunda correia (26), em que um par de roletes (3,4) é girado na direção interna e a diferentes números de rotação em relação um ao outro, o primeiro sistema de acionamento inclui: uma primeira polia de diâmetro grande (9) fixada em um eixo de rotação (5) de um par de roletes descascadores (3,4); uma primeira polia de diâmetro pequeno (10) fixada no outro eixo de rotação (6); e uma primeira correia sem fim (13) que é envolvida entre a primeira polia de diâmetro grande (9), a primeira polia de diâmetro pequeno (10) e a polia de acionamento (11) do primeiro motor (7) a fim de conectar as polias (9,10), o segundo sistema de acionamento inclui componentes de: uma segunda polia de pequeno diâmetro (19) que é fixada a um eixo de rotação (5) fixando a primeira polia de grande diâmetro (9), uma segunda polia de grande diâmetro (20) fixada a um outro eixo de rotação (6) fixando a primeira polia de pequeno diâmetro, e uma segunda correia sem fim (24) que é envolvida entre a segunda polia de pequeno diâmetro (19), a segunda polia de grande diâmetro (20), e a polia de acionamento (21) do segundo motor (8) e conecta os componentes, caracterizado por: um mecanismo de embreagem da primeira correia (15) para iniciar a transmissão de força à primeira polia de diâmetro grande (9) ser adicionalmente proporcionado no primeiro sistema de acionamento, um mecanismo de embreagem da segunda correia (26) para iniciar a transmissão de força à segunda polia de grande diâmetro (20) é adicionalmente proporcionado no segundo sistema de acionamento, o mecanismo de embreagem da primeira correia (15) inclui um primeiro membro de braços (16) que se estende na direção radial ao redor de um eixo de rotação (5), e que é girado de modo que uma trilha de rotação seja delineada sobre a periferia externa da primeira polia de diâmetro grande (9), uma primeira polia de embreagem de tensão (14a,14b) instalada em uma parte de extremidade (16c) do primeiro membro de braços (16) e um primeiro atuador (30a) girando um primeiro membro de braços (16), o primeiro atuador (30a) pode trocar entre uma posição em que a primeira correia sem fim (13) do primeiro sistema de acionamento é envolvido na primeira polia de grande diâmetro (9) para transmissão de força e uma posição em que o envolvimento é evitado, o mecanismo de embreagem da segunda correia (26) inclui um segundo membro de braços (27) que se estende na direção radial ao redor do outro eixo de rotação (6) e que é girado de tal forma que uma segunda trilha de rotação seja delineada sobre a periferia externa da segunda polia de grande diâmetro (20), uma segunda polia de embreagem de tensão (25a,25b) instalada na parte de pontual do segundo membro de braços e um segundo atuador (30b) girando um segundo membro de braços (27), e o segundo atuador (30b) pode trocar entre uma posição em que a segunda correia sem fim (24) do segundo sistema de acionamento é envolvida na segunda polia de diâmetro grande (20) para transmissão de força e uma posição em que o envolvimento é evitado.
2. Dispositivo, de acordo com a reivindicação 1, caracterizado pelo fato de que o primeiro e segundo membros de braços (16,27) incluem uma primeira e segunda partes de extremidade de suporte que é articulada de forma giratória para um e para os outros eixos de rotação (5,6), e as partes do braço que se estendem na direção da periferia externa a partir da primeira e segunda partes de extremidade de suporte, e as duas partes de braço de formato parecido com a letra V, um ângulo interno (α) definido entre as duas partes de braço é de 60°.
3. Dispositivo, de acordo com a reivindicação 1 ou 2, caracterizado pelo fato de que o primeiro atuador é um primeiro atuador giratório (30a) instalado no primeiro membro de braços (16) e um segundo atuador giratório (30b) no segundo membro de braços (27), quando a primeira correia sem fim (13) do primeiro sistema de acionamento é girada pela primeira polia de diâmetro grande (9) e fica em uma posição em que a força é transmitida, a segunda correia sem fim (24) do segundo sistema de acionamento fica em uma posição em que a segunda correia do segundo sistema de acionamento não envolve a segunda polia de diâmetro grande (20), de forma oposta, quando a segunda correia sem fim (24) no segundo sistema de acionamento é girada pela segunda polia de grande diâmetro (20) e está em uma posição em que a força é transmitida, o primeiro e segundo membros de braço (16,27) são girados de forma síncrona de modo que a primeira correia sem fim (13) do primeiro sistema de acionamento fique em uma posição em que a primeira correia sem fim (13) no primeiro sistema de acionamento encontra-se em uma posição em que o envolvimento da primeira polia de diâmetro grande (9) é evitado.
4. Dispositivo, de acordo com a reivindicação 1 ou 2, caracterizado pelo fato de que: um o primeiro e o segundo atuadores (30a,30b) são um mecanismo de transmissão de rodas dentadas de correntes incluindo: uma primeira e segunda rodas dentadas (50,51) fixadas em um primeiro e segundo membros de braços (16,27), respectivamente; uma roda dentada dupla (55) conectando a primeira e segunda rodas dentadas (50,51); e correntes que são envolvidas nas primeiras, segundas e duplas rodas dentadas (50,51,55), um cilindro de ar tipo haste é conectado a uma roda dentada dupla (55), quando a primeira correia sem fim (13) no primeiro sistema de acionamento é envolvida a primeira polia de diâmetro grande (9) pela operação do cilindro de ar tipo haste e se encontra em uma posição em que a força é transmitida, a segunda correia sem fim (24) no segundo sistema de acionamento está em uma posição em que o envolvimento da segunda polia de diâmetro grande (20) é evitado e, de maneira oposta, quando a segunda correia sem fim (24) no segundo sistema de acionamento é envolvida uma segunda polia de diâmetro grande (20) e se encontra em uma posição em que a força é transmitida, a primeira correia sem fim (13) no primeiro sistema de acionamento fica em uma posição em que o envolvimento da primeira polia de diâmetro grande (9) é evitado e o primeiro e segundo membros de braços (16,27) são respectivamente girados de forma síncrona, respectivamente.
5. Dispositivo, de acordo com a reivindicação 1 ou 2, caracterizado pelo fato de que: uma primeira polia intermediária (12) é proporcionada, pela qual a contração e expansão da primeira correia sem fim (13) é realizada pela expansão e contração de um cilindro de ar, no primeiro sistema de acionamento e, ao mesmo tempo, no segundo sistema de acionamento, é proporcionada uma segunda polia intermediária (22) e uma terceira polia intermediária (23), que realiza a contração e expansão da segunda correia sem fim (24) pela expansão e contração de um cilindro de ar.
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007224704 | 2007-08-30 | ||
| JP2007-224704 | 2007-08-30 | ||
| JP2008170580A JP5110299B2 (ja) | 2007-08-30 | 2008-06-30 | 籾摺機における脱ぷロール駆動装置 |
| JP2008-170580 | 2008-06-30 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| BRPI0803640A2 BRPI0803640A2 (pt) | 2009-05-05 |
| BRPI0803640B1 true BRPI0803640B1 (pt) | 2021-01-12 |
Family
ID=40419950
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| BRPI0803640-3A BRPI0803640B1 (pt) | 2007-08-30 | 2008-08-29 | dispositivo de acionamento de roletes descascadores em um descascador de arroz |
Country Status (6)
| Country | Link |
|---|---|
| JP (1) | JP5110299B2 (pt) |
| KR (1) | KR101080663B1 (pt) |
| CN (1) | CN101376116B (pt) |
| BR (1) | BRPI0803640B1 (pt) |
| ES (1) | ES2483915T3 (pt) |
| TW (1) | TWI460016B (pt) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104785314A (zh) * | 2014-11-05 | 2015-07-22 | 湖北永祥粮食机械股份有限公司 | 一种胶辊转速可调的砻谷机 |
| KR101545822B1 (ko) * | 2014-11-07 | 2015-08-19 | 주식회사 명진 | 곡물의 탈피 장치 |
| JP6802996B2 (ja) * | 2016-08-04 | 2020-12-23 | 株式会社サタケ | 籾摺機 |
| KR102895200B1 (ko) | 2019-09-27 | 2025-12-03 | 가부시끼가이샤 사따께 | 매조미 장치 및 매조미 제어 시스템 |
| JP7074220B1 (ja) | 2021-02-18 | 2022-05-24 | 株式会社サタケ | 回転駆動システム及びそのシステムを備えた籾摺機 |
| CN115414987A (zh) * | 2022-09-02 | 2022-12-02 | 浙江展诚机械股份有限公司 | 一种双速砻谷机及其变速机构 |
| CN116020591B (zh) * | 2023-02-13 | 2023-10-03 | 浙江展诚机械股份有限公司 | 一种变速砻谷机 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS52161774U (pt) * | 1976-05-31 | 1977-12-08 | ||
| DE2633275C3 (de) * | 1976-07-23 | 1981-05-27 | Steinmetz-Patent-Müllerei KG, 2209 Krempe | Verfahren zum Enthülsen und teilweise Trocknen von gewaschenem Getreide und Maschine zur Durchführung des Verfahrens |
| DE2705334C2 (de) * | 1977-02-09 | 1983-02-24 | Bühler-Miag GmbH, 3300 Braunschweig | Schälmaschine für Körnerfrüchte |
| MX147108A (es) * | 1979-01-24 | 1982-10-06 | Felipe Salete Garces | Mejoras a maquina pulidora y blanqueadora de granos |
| JPS6229064Y2 (pt) * | 1980-06-27 | 1987-07-25 | ||
| JPH03106452A (ja) * | 1989-09-19 | 1991-05-07 | Junichi Mizuuchi | ゴムロール式籾摺機における速度変換装置 |
| US5048407A (en) * | 1989-11-07 | 1991-09-17 | Salete Garces Felipe | Grain husking and polishing machine |
| TW396017B (en) * | 1997-04-30 | 2000-07-01 | Yanmar Agricult Equip | Thresh sieve device of united harvest machine |
| JP2002066356A (ja) | 2000-08-31 | 2002-03-05 | Yamamoto Co Ltd | 衝撃脱ぷ揺動選別装置 |
| JP2005103438A (ja) | 2003-09-30 | 2005-04-21 | Iseki & Co Ltd | 籾摺選別装置 |
| JP4483692B2 (ja) * | 2005-05-09 | 2010-06-16 | 株式会社サタケ | 脱ぷ機における脱ぷロール駆動装置 |
| TWM323799U (en) * | 2007-07-17 | 2007-12-21 | Tian-Fa Wang | Threshing machine for tip grains of crops |
-
2008
- 2008-06-30 JP JP2008170580A patent/JP5110299B2/ja active Active
- 2008-08-19 TW TW097131574A patent/TWI460016B/zh active
- 2008-08-27 ES ES08163048.5T patent/ES2483915T3/es active Active
- 2008-08-29 BR BRPI0803640-3A patent/BRPI0803640B1/pt active IP Right Grant
- 2008-08-29 CN CN2008102126812A patent/CN101376116B/zh active Active
-
2009
- 2009-03-03 KR KR1020090018069A patent/KR101080663B1/ko active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN101376116B (zh) | 2011-09-14 |
| TWI460016B (zh) | 2014-11-11 |
| CN101376116A (zh) | 2009-03-04 |
| ES2483915T3 (es) | 2014-08-08 |
| JP2009072765A (ja) | 2009-04-09 |
| KR20100003181A (ko) | 2010-01-07 |
| KR101080663B1 (ko) | 2011-11-08 |
| JP5110299B2 (ja) | 2012-12-26 |
| TW200938300A (en) | 2009-09-16 |
| BRPI0803640A2 (pt) | 2009-05-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| BRPI0803640B1 (pt) | dispositivo de acionamento de roletes descascadores em um descascador de arroz | |
| BRPI0808848B1 (pt) | Dispositivo de trator de cabo elétrico de perfilagem | |
| JP6757960B2 (ja) | 難着雪リング取外機構及び難着雪リング取外方法 | |
| JP4483692B2 (ja) | 脱ぷ機における脱ぷロール駆動装置 | |
| EP2030691B1 (en) | Husking-roll driving device in hull remover | |
| JP2006312151A5 (pt) | ||
| US20080089985A1 (en) | Manufacturing apparatus and manufacturing method of rolled sushi | |
| JP2008157329A (ja) | 物品の直線搬送装置、及び当該装置におけるベルト体の張力調整方法 | |
| JP4044051B2 (ja) | 折り機 | |
| JP7177332B2 (ja) | 搬送装置 | |
| CN106034853B (zh) | 一种用于大棚放风口的放风控制装置 | |
| CN116887920B (zh) | 旋转驱动系统和具备该系统的砻谷机 | |
| CA2622866A1 (en) | Transferring device for repositioning articles | |
| KR100577757B1 (ko) | 소형 항공기를 위한 다관절 회전식 평판 플랩 | |
| EP1245517B1 (en) | Paper roll driving apparatus | |
| JP2008258427A5 (pt) | ||
| US2157757A (en) | Variable speed transmission | |
| KR102726839B1 (ko) | 스트링 액추에이터 기반 가변 반지름 이중 풀리 메커니즘 | |
| BRPI0704961B1 (pt) | Engrenagem, caixa de engrenagem, e, turbo-máquina | |
| KR20040110154A (ko) | 부품실장기용 노즐 구동기구 | |
| JP4450572B2 (ja) | タイヤ成型機の成型ドラム駆動装置 | |
| JP6741450B2 (ja) | カーブベルトコンベヤ | |
| KR20170142126A (ko) | 이격 회전 제어가 가능한 링크 장치 | |
| JPH0526367Y2 (pt) | ||
| TH2301005298A (th) | เครื่องสีเกรน |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| B03A | Publication of an application: publication of a patent application or of a certificate of addition of invention | ||
| B06F | Objections, documents and/or translations needed after an examination request according art. 34 industrial property law | ||
| B06U | Preliminary requirement: requests with searches performed by other patent offices: suspension of the patent application procedure | ||
| B06A | Notification to applicant to reply to the report for non-patentability or inadequacy of the application according art. 36 industrial patent law | ||
| B09A | Decision: intention to grant | ||
| B16A | Patent or certificate of addition of invention granted |
Free format text: PRAZO DE VALIDADE: 10 (DEZ) ANOS CONTADOS A PARTIR DE 12/01/2021, OBSERVADAS AS CONDICOES LEGAIS. |