BRPI0915128A2 - método para atenuar ruído de baixa frequência em uma fita sísmica de sensor duplo - Google Patents
método para atenuar ruído de baixa frequência em uma fita sísmica de sensor duplo Download PDFInfo
- Publication number
- BRPI0915128A2 BRPI0915128A2 BRPI0915128A BRPI0915128A BRPI0915128A2 BR PI0915128 A2 BRPI0915128 A2 BR PI0915128A2 BR PI0915128 A BRPI0915128 A BR PI0915128A BR PI0915128 A BRPI0915128 A BR PI0915128A BR PI0915128 A2 BRPI0915128 A2 BR PI0915128A2
- Authority
- BR
- Brazil
- Prior art keywords
- vertical
- pressure
- sensor signal
- registered
- vertical speed
- Prior art date
Links
- 238000000034 method Methods 0.000 title claims description 59
- 230000009977 dual effect Effects 0.000 title description 6
- 230000001902 propagating effect Effects 0.000 claims abstract description 5
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 claims description 26
- 230000000630 rising effect Effects 0.000 claims description 14
- 230000002123 temporal effect Effects 0.000 claims description 5
- 230000002238 attenuated effect Effects 0.000 claims description 3
- 230000004069 differentiation Effects 0.000 claims description 2
- 238000000151 deposition Methods 0.000 claims 2
- 230000009466 transformation Effects 0.000 claims 2
- 239000000203 mixture Substances 0.000 abstract description 6
- 239000002245 particle Substances 0.000 description 35
- 230000008569 process Effects 0.000 description 9
- 238000005259 measurement Methods 0.000 description 7
- 238000000354 decomposition reaction Methods 0.000 description 6
- 238000012545 processing Methods 0.000 description 6
- 230000001133 acceleration Effects 0.000 description 5
- 230000015572 biosynthetic process Effects 0.000 description 5
- 238000005755 formation reaction Methods 0.000 description 5
- 230000003595 spectral effect Effects 0.000 description 5
- 238000009825 accumulation Methods 0.000 description 3
- 230000035508 accumulation Effects 0.000 description 3
- 230000001174 ascending effect Effects 0.000 description 3
- 238000005457 optimization Methods 0.000 description 3
- 230000000644 propagated effect Effects 0.000 description 3
- 238000006467 substitution reaction Methods 0.000 description 3
- 239000004215 Carbon black (E152) Substances 0.000 description 2
- 230000003321 amplification Effects 0.000 description 2
- 238000006073 displacement reaction Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 239000002360 explosive Substances 0.000 description 2
- 230000014509 gene expression Effects 0.000 description 2
- 229930195733 hydrocarbon Natural products 0.000 description 2
- 150000002430 hydrocarbons Chemical class 0.000 description 2
- VNWKTOKETHGBQD-UHFFFAOYSA-N methane Chemical compound C VNWKTOKETHGBQD-UHFFFAOYSA-N 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000003199 nucleic acid amplification method Methods 0.000 description 2
- 238000001228 spectrum Methods 0.000 description 2
- 238000011144 upstream manufacturing Methods 0.000 description 2
- SGTNSNPWRIOYBX-UHFFFAOYSA-N 2-(3,4-dimethoxyphenyl)-5-{[2-(3,4-dimethoxyphenyl)ethyl](methyl)amino}-2-(propan-2-yl)pentanenitrile Chemical compound C1=C(OC)C(OC)=CC=C1CCN(C)CCCC(C#N)(C(C)C)C1=CC=C(OC)C(OC)=C1 SGTNSNPWRIOYBX-UHFFFAOYSA-N 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000015556 catabolic process Effects 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 238000005553 drilling Methods 0.000 description 1
- 238000010891 electric arc Methods 0.000 description 1
- 238000000605 extraction Methods 0.000 description 1
- 239000007789 gas Substances 0.000 description 1
- 238000007373 indentation Methods 0.000 description 1
- 229910052500 inorganic mineral Inorganic materials 0.000 description 1
- 239000011707 mineral Substances 0.000 description 1
- 239000003345 natural gas Substances 0.000 description 1
- 230000002085 persistent effect Effects 0.000 description 1
- 239000011435 rock Substances 0.000 description 1
- 230000035945 sensitivity Effects 0.000 description 1
- 230000009897 systematic effect Effects 0.000 description 1
- 238000012876 topography Methods 0.000 description 1
Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01V—GEOPHYSICS; GRAVITATIONAL MEASUREMENTS; DETECTING MASSES OR OBJECTS; TAGS
- G01V1/00—Seismology; Seismic or acoustic prospecting or detecting
- G01V1/38—Seismology; Seismic or acoustic prospecting or detecting specially adapted for water-covered areas
- G01V1/3808—Seismic data acquisition, e.g. survey design
Landscapes
- Life Sciences & Earth Sciences (AREA)
- Physics & Mathematics (AREA)
- Geology (AREA)
- Engineering & Computer Science (AREA)
- Acoustics & Sound (AREA)
- Environmental & Geological Engineering (AREA)
- Oceanography (AREA)
- Remote Sensing (AREA)
- General Life Sciences & Earth Sciences (AREA)
- General Physics & Mathematics (AREA)
- Geophysics (AREA)
- Geophysics And Detection Of Objects (AREA)
- Measurement Of Mechanical Vibrations Or Ultrasonic Waves (AREA)
Abstract
método para prospecção geográfica a presente invenção refere-se a um sinal de sensor de velocidade vertical calculado é determinado de um sinal de sensor de pressão regis- trado (11). um sinal de sensor de velocidade vertical construído é determinado como uma combinação linear do sinal de sensor de velocidade vertical calculado e de um sinal de sensor de velocidade vertical registrado, em dados de unidades de fita sísmica de sensor duplo, por uso de um coeficiente de mistura, como uma constante de proporcionalidade (12). um componente do campo de onda de pressão ascendente é determinado como metade de uma diferença do sinal de sensor de pressão registrado e do sinal de sensor de velocidade vertical construído, como uma função do coeficiente de mistura (13). um erro no componente do campo de onda de pressão ascendente é determinado por propagação de erros nos termos do sinal de sensor de pressão registrado e do sinal de sensor de velocidade vertical construído (14). um valor do coeficiente de mistura é determinado, que minimiza o erro no componente do campo de onda de pressão ascendente (15).
Description
PARA ATENUAR RUÍDO DE BAIXA FREQUÊNCIA EM UMA FITA SÍSMICA DE SENSOR DUPLO.
CAMPO DA INVENÇÃO
A presente invenção refere-se, de uma maneira geral, ao campo da prospecção geofísica. Mais particularmente, a invenção refere-se ao campo da atenuação de ruído em dados de unidade de fita sísmica marinha de sensor duplo.
DESCRIÇÃO DA TÉCNICA RELACIONADA
Na indústria de óleo e gás, a prospecção geofísica é comumente usada para ajudar na busca e avaliação de formações subterrâneas. As técnicas de prospecção geofísica geram conhecimento da estrutura subterrânea terrestre, que é útil para a descoberta e extração de recursos minerais valiosos, particularmente, depósitos de hidrocarbonetos, tais como de óleo e gás natural. Uma técnica bem conhecida de prospecção geofísica é um levantamento sísmico. Em um levantamento sísmico terrestre, um sinal sísmico é gerado na, ou próximo da, superfície terrestre, e depois se desloca para baixo para o subsolo terrestre. Em um levantamento sísmico marinho, o sinal sísmico pode também deslocar-se por um corpo de água sobrejacente ao subsolo terrestre. As fontes de energia sísmica são usadas para gerar o sinal sísmico que, após propagação para a terra, é, pelo menos parcialmente, refletido pelos refletores sísmicos subterrâneos. Esses refletores sísmicos são, tipicamente, interfaces entre as formações subterrâneas, tendo diferentes propriedades elásticas, especificamente, velocidade de onda sonora e densidade da rocha, que propiciam as diferenças em impedância acústica nas interfaces. A energia sísmica refletida é detectada por sensores sísmicos, também chamados receptores sísmicos, na, ou próximo da, superfície terrestre, em um corpo de água sobrejacente, ou em profundidades conhecidas em furos de poços e registrada.
Os dados sísmicos resultantes, obtidos na execução de um levantamento sísmico, são processados para gerar informações relativas à estrutura geológica e às propriedades das formações subterrâneas na área sendo levantada. Os dados sísmicos processados são processados para exibição e análise de teor de hidrocarbonetos potencial dessas formações subterrâneas. O objetivo do processamento de dados sísmicos é extrair deles o maior número de informações possíveis relativas às formações subterrâneas, para retratar adequadamente o subsolo geológico. Para identificar os locais no subsolo terrestre, nos quais há uma probabilidade para a descoberta de acúmulos de petróleo, grandes somas de dinheiro são gastas em reunião, processamento e interpretação de dados sísmicos. O processo de construção das superfícies refletoras, definindo as camadas terrestres subterrâneas de interesse, dos dados sísmicos registrados, proporciona uma imagem da terra em profundidade ou tempo.
A imagem da estrutura do subsolo terrestre é produzida para permitir que um intérprete selecione os locais com a maior possibilidade de ter acúmulos de petróleo. Para verificar a presença de petróleo, um poço deve ser perfurado. A perfuração de poços para determinar se os depósitos de petróleo estão ou não presentes é uma empreitada extremamente cara e intensa em tempo. Por essa razão, há uma continuidade persistente para aperfeiçoar o processamento e a exibição dos dados sísmicos, de modo a produzir uma imagem da estrutura do subsolo terrestre, o que vai aperfeiçoar a capacidade de um intérprete, se a interpretação for feita por um computador ou um ser humano, para determinar a probabilidade que um acúmulo de petróleo existe em um local particular no subsolo terrestre.
As fontes sísmicas adequadas para gerar o sinal sísmico em levantamentos sísmicos terrestres podem incluir explosivos ou vibradores. Os levantamentos sísmicos marinhos empregam, tipicamente, uma fonte sísmica submersa, rebocada por um navio e ativada, periodicamente para gerar um campo de onda acústico. A fonte sísmica gerando o campo de onda pode ser de vários tipos, incluindo uma pequena carga explosiva, uma centelha ou arco elétrico, um vibrador marinho, e, tipicamente, uma pistola. A pistola de fonte sísmica pode ser uma pistola d'água, uma pistola de vapor e, mais tipicamente, uma pistola de ar. Tipicamente, uma fonte sísmica marinha consiste não em um único elemento fonte, mas de um conjunto distribuído espacialmente de elementos fonte. Essa disposição é particularmente verdadeira para pistolas de ar, a forma mais comum de fonte sísmica marinha.
Os tipos adequados de sensores sísmicos incluem, tipicamente, sensores de velocidade de partícula, particularmente, em levantamentos terrestres, e sensores de pressão de água, particularmente, em levantamentos marinhos. Algumas vezes, os sensores de deslocamento de partícula, os sensores de aceleração de partícula, ou os sensores de gradiente de pressão são usados em lugar, ou além dos sensores de velocidade de partícula. Os sensores de velocidade de partícula e os sensores de pressão de água são comumente conhecidos na técnica como geofones e hidrofones, respectivamente. Os sensores sísmicos podem ser dispostos por si mesmos, mas são, mais comumente, dispostos em conjuntos de sensores. Adicionalmente, os sensores de pressão e os sensores de velocidade de partícula podem ser dispostos conjuntamente em um levantamento marinho, colocados em pares ou pares de conjuntos.
Em um levantamento sísmico marinho típico, um recipiente de levantamento sísmico se desloca na superfície da água, tipicamente, em torno de 5 nós, e contém equipamento de aquisição sísmico, tais como equipamento de controle de navegação, controle de fonte sísmica, controle de sensor sísmico e registro. O equipamento de controle de fonte sísmica faz com que uma fonte sísmica, reboca no corpo de água pelo navio sísmico, para atuar em tempos selecionados. As unidades de fita sísmicas, também chamadas cabos sísmicos, são estruturas em forma de cabo alongadas, rebocadas no corpo de água pelo navio de levantamento sísmico, que reboca a fonte sísmica, ou por outro navio de levantamento sísmico. Tipicamente, uma pluralidade de unidades de fita sísmica é rebocada atrás de um navio sísmico. As unidades de fita sísmicas contêm sensores, para detectar os campos de onda refletidos, iniciados pela fonte sísmica e refletidos de interfaces refletoras. Convencionalmente, as unidades de fita sísmicas contêm sensores de pressão, tais como hidrofones, mas unidades de fita sísmica têm sido propostas, que contêm sensores de velocidade de partícula em água, tais como geofones ou sensores de aceleração de partícula, tais como acelerômetros, além dos hidrofones. Os sensores de pressão e os sensores de movimento de partícula podem ser dispostos bem próximos, colocados em pares ou pares de conjuntos ao longo de um cabo sísmico.
Após a onda refletida atingir o cabo da unidade de fita sísmica, a onda continua a propagar-se para a interface água / ar na superfície da água, da qual a onda é refletida para baixo, e é de novo detectada pelos hidrofones no cabo da unidade de fita sísmica. A superfície da água é um bom refletor, e o coeficiente de reflexão na superfície da água é quase que unitário em grandeza e é negativo em sinal para os sinais de pressão. As ondas refletidas na superfície vão ser desse modo, deslocadas em fase 180 graus em relação às ondas propagando-se para cima. A onda propagando-se para baixo, registrada pelos receptores, é comumente referida como a reflexão superficial do sinal fantasma. Em virtude da reflexão superficial, a superfície da água age como um filtro, que cria entalhes espectrais no sinal registrado, dificultando registrar os dados fora de uma largura de faixa selecionada. Em virtude da influência da reflexão superficial, algumas frequências no sinal registrado são amplificadas e algumas frequências são atenuadas.
A atenuação máxima vai ocorrer em frequências para as quais a distância de propagação entre o hidrofone detector e a superfície da água é igual a uma metade de comprimento de onda. A amplificação máxima vai ocorrer em frequências para as quais a distância de propagação, entre o hidrofone detector e a superfície da água, é um quarto de comprimento de onda. O comprimento de onda da onda acústica é igual à velocidade dividida pela frequência, e a velocidade de uma onda acústica em água é cerca de 1.500 metros/segundo. Consequentemente, o local no espectro de frequências do entalhe espectral resultante é facilmente determinável. Por exemplo, para uma unidade de fita sísmica a uma profundidade de 7 metros, e ondas com incidência vertical, a atenuação máxima vai ocorrer a uma frequência de cerca de 107 Hz, e uma amplificação máxima vai ocorrer a uma frequência de cerca de 54 Hz.
Um sensor de movimento de partícula, tal como um geofone, tem sensibilidade direcional, enquanto que um sensor de pressão, tal como um hidrofone, não tem. Consequentemente, os sinais de campo de onda ascendentes, detectados por um geofone e um hidrofone, localizados próximos entre si, vão estar em fase, enquanto que os sinais de campo de onda descendentes vão ser registrados 180 graus fora de fase. Várias técnicas foram propostas para uso dessa diferença de fase, para reduzir os entalhes espectrais provocados pela reflexão superficial, e, se os registros forem feitos no fundo do mar, atenuar os múltiplos transportados pela água. Deve-se notar que uma alternativa para que se tenha o geofone e o hidrofone colocalizados, é que se tenha uma densidade espacial suficiente de sensores, de modo que os respectivos campos de onda, registrados pelos hidrofone e geofone, possam ser interpolados ou extrapolados, para produzir os dois campos de onda no mesmo local.
É bem conhecido na técnica que os sinais de pressão e de movimento de partícula podem ser combinados para derivar ambos os campos de onda ascendente e descendente. Para os registros no fundo do mar, os campos de onda ascendente e descendente podem ser subsequentemente combinados, para remover o efeito da reflexão superficial e atenuar os múltiplos transportados pela água no sinal sísmico. Para aplicações de unidades de fita sísmicas rebocadas, no entanto, o sinal de movimento de partícula tem sido registrado como tendo utilidade, em virtude do alto nível de ruído no sinal de movimento de partícula. No entanto, se menos sinais de movimento de partícula ruidosos podem ser proporcionados para aquisição de unidades de fita sísmicas rebocadas, o efeito da reflexão superficial pode ser removida dos dados.
Tem sido difícil obter a mesma largura de faixa nos dados do sensor de movimento como nos dados do sensor de pressão, por causa do ruído induzido por vibrações na unidade de fita sísmica, que é monitorado pelos sensores de movimento de partícula. O ruído é, no entanto, basicamente confinado a frequências mais baixas. Um modo de reduzir o ruído é ter vários sensores em série ou em paralelo. Essa abordagem, no entanto, nem sempre reduz suficientemente o ruído, para produzir uma razão de sinal para ruído satisfatória, para processamento sísmico adicional.
Desse modo, existe uma necessidade para um método para atenuar o ruído de baixa frequência encontrado em sinais de sensores de velocidade vertical, quando da combinação dos sinais de sensor de pressão e de sensor de velocidade vertical nos dados de unidades de fita sísmicas de sensor duplo.
BREVE SUMÁRIO DA INVENÇÃO
A invenção é um método para atenuação de ruído de baixa frequência em unidade de fita sísmica de sensor duplo, por combinação dos sinais do sensor de pressão e do sensor de velocidade vertical. Um sinal do sensor de velocidade vertical calculado é determinado de um sinal do sensor de pressão registrado. Um sinal do sensor de velocidade vertical construído é determinado como uma combinação linear do sinal do sensor de velocidade vertical construído e de um sinal do sensor de velocidade vertical registrado nos dados da unidade de fita sísmica de sensor duplo, usando um coeficiente de mistura como uma constante de proporcionalidade. Um componente do campo de onda de pressão ascendente é determinado como metade de uma diferença do sinal do sensor de pressão registrado e do sinal do sensor de velocidade vertical construído, como uma função do coeficiente de mistura. Um erro no componente do campo de onda de pressão ascendente é determinado por propagação de erros nos termos do sinal do sensor de pressão registrado e do sinal do sensor de velocidade vertical construído. Um valor do coeficiente de mistura é determinado que minimiza o erro no componente do campo de onda de pressão ascendente.
BREVE DESCRIÇÃO DOS DESENHOS
A invenção e as suas vantagens podem ser mais facilmente entendidas por referência à descrição detalhada apresentada a seguir e aos desenhos em anexo, em que:
a figura 1 é um fluxograma ilustrando uma primeira concretização da invenção para atenuar o ruído de baixa frequência em uma unidade de fita sísmica de sensor duplo, por combinação dos sinais do sensor de pressão e do sensor de velocidade vertical;
a figura 2 é um fluxograma ilustrando uma segunda concretiza ção da invenção para atenuar o ruído de baixa frequência em uma unidade de fita sísmica de sensor duplo, por combinação dos sinais do sensor de pressão e do sensor de velocidade vertical;
a figura 3 é um fluxograma ilustrando uma concretização da invenção para determinar um sinal de velocidade vertical calculado;
a figura 4 é um fluxograma ilustrando uma concretização da invenção para determinar um componente do campo de onda de pressão ascendente;
a figura 5 é um fluxograma ilustrando uma concretização da invenção para determinar um valor do coeficiente de mistura que minimiza o erro;
a figura 6 é um gráfico de sinal e ruído para os sinais do sensor de pressão e do sensor de velocidade vertical registrados;
a figura 7 é um gráfico do coeficiente de mistura, a, determinado pelo método da invenção para o cenário de ruído, ilustrado na figura 6;
a figura 8 é um gráfico do sinal de velocidade vertical construído e das contribuições de ruído dos sinais dos sensores de pressão e de velocidade vertical registrados;
a figura 9 é um gráfico do componente do campo de onda de pressão ascendente e das contribuições de ruído dos sinais dos sensores de pressão e de velocidade vertical registrados; e a figura 10 é um gráfico de sinal e ruído para o componente do campo de onda de pressão ascendente, para um coeficiente de mistura, a, calculado pelo método da invenção, mostrado na figura 7, e para dois outros cálculos abaixo do ótimo.
Ainda que a invenção vá ser descrita em conjunto com suas concretizações preferidas, deve-se entender que a invenção não é limitada a essas. Ao contrário, a invenção é intencionada para cobrir todas as alternativas, modificações e equivalentes, que podem ser incluídas dentro do âmbito da invenção, como definido pelas reivindicações em anexo.
DESCRIÇÃO DETALHADA DA INVENÇÃO
Uma unidade de fita sísmica de sensor duplo registra o campo de onda sísmico por uso de ambos os sensores de pressão e de velocidade vertical, propiciando uma decomposição subsequente do campo de onda total em componentes ascendente e descendente. O erro na estimativa desses componentes é aumentado por ruído em qualquer um dos sensores, mas é reduzido em virtude da independência estatística das duas medidas dos sensores. O ruído de baixa frequência indesejável, no sensor de velocidade vertical, pode ser removido, antes de decomposição, por substituição da parte de baixa frequência dos dados de velocidade vertical por um sinal de velocidade vertical, calculado do sinal de pressão. Essa previsão considera os fatores, que incluem as propriedades do meio de propagação, o ângulo de incidência da energia entrante, e do fantasma, que se origina da reflexão do campo de onda sísmico do fundo do mar. Esse processo de substituição reduz a contribuição do sensor de velocidade vertical mais ruidoso, mas ao custo de uma menor independência estatística entre o ruído da pressão e o ruído da velocidade vertical modificada.
Esse processo de substituição de baixa frequência é descrito mais detalhadamente no pedido de patente U.S. 7.359.383 B2, de Svein Vaage, et al.', intitulada System for Combining Signals of Pressure Sensors and Particle Motion Sensors in Marine Seismic Streamers, depositado em 15 de abril de 2008; e cedido a uma empresa afiliada do requerente da presente invenção. Descreve-se um método para combinar os sinais de um sensor de pressão e de um sensor de movimento de partícula, registrados em uma unidade de fita sísmica marinha, para reduzir o ruído no sinal combinado do sensor de pressão e do sensor de movimento de partícula, o sinal do sensor de pressão registrado tendo uma largura de faixa compreendendo uma primeira faixa de frequências e uma segunda faixa de frequências, a primeira faixa de frequências estando a frequências mais baixas do que as frequências da segunda faixa de frequências, e o sinal do sensor de movimento de partícula registrado tendo uma largura de faixa compreendendo pelo menos a segunda faixa de frequências. O método compreende calcular um sinal do sensor de movimento de partícula, na primeira faixa de frequências, do sinal do sensor de pressão registrado, gerando, desse modo, um sinal do sensor de movimento de partícula simulado na primeira faixa de frequências; fundir o sinal do sensor de movimento de partícula simulado, apenas na primeira faixa de frequências, com o sinal do sensor de movimento de partícula registrado, na segunda faixa de frequências, para gerar um sinal do sensor de movimento de partícula fundido, tendo substancialmente a mesma largura de faixa do sinal do sensor de pressão registrado; e combinar o sinal do sensor de pressão registrado e o sinal do sensor de movimento de partícula fundido, para processamento posterior.
A presente invenção é um método para atenuar o ruído de baixa frequência em dados de unidade de fita sísmica de sensor duplo, por combinação dos sinais do sensor de pressão e do sensor de velocidade vertical. Em particular, a invenção é um método para determinar que combinação de sinais de velocidade vertical previstos e medidos, tal como de um processo de substituição de baixa frequência, como descrito acima, pode gerar a melhor estimativa subsequente do campo de onda decomposto. No caso geral, a invenção determina a melhor combinação, por considerar os termos de erro nas medidas originais, e descobrir a combinação que minimiza uma função de custo, que representa o erro previsto no campo de onda ascendente (ou descendente). Na concretização particular, na qual o ruído é a única fonte de erro, o ruído de medida é considerado como um termo de variância e a função de custo são encontrados por uma combinação adequada dessas variâncias.
A invenção emprega os sinais combinados de sensores de pressão (tipicamente, os hidrofones) e os sensores de velocidade vertical (tipicamente, os geofones), localizados nas unidades de fita sísmicas. Os sinais combinados podem ser então utilizados para gerar os componentes do campo de onda ascendente e descendente, que são úteis para processamento sísmico adicional, tal como a atenuação de múltiplos nos dados sísmicos marinhos. Uma vez que um sinal de velocidade vertical registrado é frequentemente contaminado por ruído de baixa frequência, devido às vibrações típicas em uma unidade de fita sísmica rebocada, a razão de sinal para ruído para os sinais combinados vai ser inferior. O sinal de velocidade vertical po de ser calculado do sinal do sensor de pressão, dentro de uma determinada faixa de frequências, se o espectro do sinal do sensor de pressão tiver uma razão de sinal para ruído satisfatória, dentro dessa faixa de frequências (e não tem quaisquer entalhes dentro dessa faixa de frequência), e se a profundidade dos sensores de pressão e de velocidade vertical for conhecida. Se a profundidade para os sensores for desconhecida, a profundidade pode ser calculada da frequência dos entalhes espectrais introduzidos pela reflexão superficial, um processo que é bem conhecido na técnica.
A parte de baixa frequência do sinal de velocidade vertical vai, tipicamente, precisar ser substituída, porque tem uma baixa razão de sinal para ruído. A parte correspondente do sinal do sensor de pressão, a ser usada para calcular o sinal de movimento de partícula, vai ter, tipicamente, uma boa razão de sinal para ruído, nessa faixa de baixas frequências. Portanto, a profundidade do sensor de pressão é selecionada, de preferência, de modo que a frequência do primeiro entalhe espectral, no sinal do sensor de pressão, provocado pela reflexão superficial, seja maior do que a faixa de baixas frequências, na qual o sinal de velocidade vertical é calculado e substituído.
O método da invenção é particularmente útil para unidades de fita sísmicas marinhas rebocadas, uma vez que a vibração de uma unidade de fita sísmica rebocada incorpora uma quantidade significativa de ruído ao sinal do sensor de movimento de partícula. Desse modo, o método da invenção vai ser ilustrado em termos de unidades de fita sísmicas rebocadas.
O método da invenção emprega sensores de pressão, que são responsivos às variações de pressão no meio, no qual os sensores de pressão são acoplados. O meio é, tipicamente, água. Apenas para clareza, o método da invenção vai ser ilustrado pelo uso de hidrofones, mas isso não significa limitar a invenção.
O método da invenção emprega sensores de movimento de partícula, que são responsivos a movimentos nas partículas da invenção, às quais os sensores de movimento são acoplados. Em geral, os sensores de movimento de partícula podem ser responsivos ao deslocamento das partí cuias, à velocidade das partículas, ou à aceleração das partículas no meio. Na presente invenção, os sensores de velocidade de partícula são os preferidos. Desse modo, se os sensores de movimento, que são usados, forem responsivos à posição, então, de preferência, o sinal de posição é diferenciado para convertê-lo em um sinal de velocidade por meios computacionais bem conhecidos na técnica. Se sensores de movimento forem usados, que são responsivos à aceleração (tipicamente, os chamados acelerômetros), então, de preferência, o sinal de aceleração é integrado para convertê-lo em um sinal de velocidade por meios computacionais bem conhecidos na técnica.
Em uma concretização alternativa da invenção, os sensores de movimento multicomponente são empregados no cabo sísmico. Apenas para clareza, essa concretização da invenção vai ser ilustrada por uso de geofones, mas isso não significa limitar a invenção. No exemplo particular de um geofone tricomponente, um geofone é montado para monitorar a velocidade das partículas na direção vertical. Esse geofone é chamado um geofone vertical. Dois geofones são montados em direções ortogonais relativamente entre si, e no geofone montado verticalmente, para monitorar o movimento horizontal. Tipicamente, um geofone de três componentes é orientado para monitorar o movimento na direção vertical, em uma direção em linha, e em uma direção transversal à linha. O posicionamento desses geofones nessas três direções permite que a direção de propagação de um sinal entrante seja detectada. Também permite a detecção de arranhão ou outro comportamento mecânico do cabo sísmico. Para clareza, o método da invenção vai ser ilustrado pelo uso de geofones verticais, mas isso não significa limitar a invenção.
O método da invenção vai ser ilustrado pela discussão apresentada a seguir, com referência aos fluxogramas apresentados nas figuras 1 a 5. As figuras 1 e 2 mostram fluxogramas ilustrando duas concretizações da invenção, para atenuar o ruído de baixa frequência em dados de unidades de fita sísmicas de sensor duplo. As figuras 3 a 5 mostram fluxogramas, ilustrando ainda concretizações particulares da invenção, discutidas com refe rência ao fluxograma apresentado na figura 2. A discussão apresentada a seguir vai ser conduzida no domínio frequência - número de onda 2D (o-kx), para facilidade de ilustração, em que 2D se refere a duas dimensões espaciais, x e z. Essa seleção de domínios não é intencionada para limitar a invenção. Em particular, a extensão para o domínio frequência - número de onda 3D (ro-kx-ky) é direta, e vai ser indicada em locais adequados na discussão apresentada abaixo.
A figura 1 mostra um fluxograma ilustrando uma primeira concretização da invenção, para atenuar ruído de baixa frequência em dados de unidades de fita sísmicas de sensor duplo, por combinação de sinais de sensor de pressão e de sensor de velocidade vertical.
Na caixa 11, um sinal de velocidade vertical calculado Vz cal é determinado de um único sinal de sensor de pressão registrado Prec. O sinal de velocidade vertical calculado Vz cal é calculado, de preferência, na parte de baixa frequência ruidosa de um sinal de sensor de velocidade vertical registrado l//ec.
Na caixa 12, um sinal de sensor de velocidade vertical construído Vz con é determinado como uma combinação linear do sinal de velocidade vertical calculado Vzcal, na caixa 11, e o sinal de sensor de velocidade vertical registrado Vzrec, usando um coeficiente de mistura, a. Em uma concretização preferida, o sinal de sensor de velocidade vertical construído Vz con é determinado por um método, tal como o processo de substituição de baixa frequência, descrito acima, na discussão do pedido de patente U.S. 7.359.283 B2.
Na caixa 13, um componente do campo de onda de pressão ascendente é determinado como metade de uma diferença do sinal de sensor de pressão registrado P™ e do sinal de sensor de velocidade vertical construído Vz con da caixa 12, em função do coeficiente de mistura, a.
Na caixa 14, os erros nos termos do sinal de sensor de pressão registrado P™0 e do sinal de sensor de velocidade vertical construído \7z con, da caixa 13, são propagados para determinar os erros no componente do campo de onda de pressão ascendente Pup.
Na caixa 15, o valor do coeficiente de mistura, α é determinado, de modo a minimizar o erro no componente do campo de onda de pressão ascendente Ρρ, na caixa 14.
A figura 2 mostra um fluxograma ilustrando uma segunda concretização da invenção, para atenuar o ruído de baixa frequência em dados de unidades de fita sísmicas de sensor duplo, por combinação dos sinais do sensor de pressão e do sensor de velocidade vertical.
Na caixa 21, uma profundidade do receptor z^ é determinada. A profundidade de recepção pode ser determinada por quaisquer meios conhecidos na técnica, tal como por um sensor de profundidade, ou um cálculo.
Na caixa 22, um sinal de sensor de pressão registrado (medido) P™ e um sinal de sensor de velocidade vertical total registrado (medido) Vz rec são obtidos na profundidade de recepção determinada na caixa 21. Em uma concretização, o sinal de sensor de pressão registrado Prec e o sinal de sensor de velocidade vertical total registrado \//ec são obtidos de pares colocados de (grupos de) sensores de pressão e sensores de velocidade vertical, em uma unidade de fita sísmica marinha. Tipicamente, os sensores de pressão são hidrofones, e os sensores de velocidade vertical são geofones, mas essa seleção de sensores não deve ser considerada como uma limitação da invenção.
Na caixa 23, um sinal de sensor de velocidade vertical calculado Vzca/ é determinado do sinal de sensor de pressão registrado Pec, obtido na caixa 22. O sinal de sensor de velocidade vertical calculado Vz cal pode ser representado no caso 2D por:
= (1) em que F é um fator para garantir que o termo do sinal do sensor de pressão, no lado direito da Equação (1), seja equivalente em campo de onda ao sinal de sensor de velocidade vertical, no lado esquerdo da Equação (2). O sinal de sensor de velocidade vertical calculado Vz cal na Equação (2) pode ser também representado no caso 3D por:
Um método particular para determinar a sinal de sensor de velocidade vertical calculado \Zz ca/, incluindo uma expressão particular para o fator F, é ilustrado pela discussão com referência ao fluxograma apresentado na figura 3, abaixo.
Na caixa 24, um sinal de sensor de velocidade vertical construído Vz con é determinado do sinal de sensor de velocidade vertical total registrado Vzrec, obtido na caixa 22, e do sinal de sensor de velocidade vertical calculado Vzcal, determinado do sinal de sensor de pressão registrado P™, obtido na caixa 22. Em uma concretização, o sinal de sensor de velocidade vertical construído Vzcon é determinado como uma combinação linear do sinal de sensor de velocidade vertical total registrado V™ e do sinal de sensor de velocidade vertical calculado Vzca/, usando um coeficiente de mistura a, como uma constante de proporcionalidade entre os dois sinais de sensores.
O sinal de sensor de velocidade vertical construído V/0” pode ser representado no caso 2D por:
!“”(!„ z*.
= (1-^-^(1,^1,2,)+^-.^(1,,z>)’ (2) usando a Equação (1) na segunda linha. O sinal de sensor de velocidade vertical construído Vz con, na Equação 2, pode ser representado de modo similar, no caso 3D, por:
^(1,.1,^1^)=(1-^.^(1,,1,,^,^)+^-^(1,,1,^1^) = (l-a)-K”(l„t,,rR1fi,)+a^-P™(lx,l,,z'!,ía)·
Um método particular para determinar o sinal de sensor de velocidade vertical construído Vz on é ilustrado pela discussão com referência ao fluxograma apresentado na figura 3, abaixo.
Na caixa 25, o campo de onda de pressão é decomposto em componentes de campo de onda ascendentes e descendentes. Em uma concretização, a decomposição do campo de onda de pressão é determinada por cálculo do componente do campo de onda de pressão ascendente /-?up como metade de uma diferença do sinal de sensor de pressão registrado
P”*, da caixa 22, e do sinal de sensor de velocidade vertical construído Vz con, da caixa 24. O componente do campo de onda de pressão ascendente P“p é então também uma função do coeficiente de mistura, a, da caixa 24. Uma concretização particular para determinar o componente do campo de onda de pressão ascendente Pp é ilustrada pela discussão com referência ao fluxograma apresentado na figura 4, abaixo.
Na caixa 26, o componente do campo de onda de pressão ascendente P°p é reformulado como uma função do sinal de sensor de pressão registrado P™0, da caixa 22, do sinal de sensor de velocidade vertical total registrado Vz rec, da caixa 22, e do coeficiente de mistura, a, da caixa 24. Essa reformulação é discutida em mais detalhes abaixo, com referência ao fluxograma na figura 5.
Na caixa 27, os erros no sinal de sensor de pressão registrado reformulado e do sinal de sensor de velocidade vertical registrado, da caixa 26, são propagados para determinar os erros no componente do campo de onda de pressão ascendente Pup. Essa propagação é discutida em mais detalhes abaixo com referência ao fluxograma na figura 5.
Na caixa 28, um valor do coeficiente de mistura, a, é determinado, que minimiza o erro no componente do campo de onda de pressão ascendente Pup, na caixa 27. Uma concretização particular para determinar o valor do coeficiente de mistura, a, que minimiza o erro para o caso no qual o ruído de medida é a única fonte de erro, é ilustrada pela discussão com referência ao fluxograma apresentado na figura 5, abaixo. Essa concretização particular aumenta a discussão nas caixas 26 - 28 acima.
Na caixa 29, o componente do campo de onda de pressão ascendente Pup, na caixa 27, é recalculado com o valor determinado do coeficiente de mistura, a, da caixa 28, que minimiza o erro.
A figura 3 mostra um fluxograma ilustrando um método para determinar um sinal de sensor de velocidade vertical calculado Vz cal. Esse método particular foi referido nas caixas 23 e 24 da figura 2. Esse método é análogo ao método descrito no pedido de patente U.S. 7.359.283 B2, discutido acima.
Na caixa 31, um sinal de sensor de pressão registrado P™ e um sinal de sensor de velocidade vertical total registrado Vzrec são obtidos. Nessa concretização 2D particular sendo ilustrada, o sinal de sensor de pressão registrado P™ (kx, zR, ω) e o sinal de sensor de velocidade vertical total registrado Vzrec (kx, zR, ω) são apresentados em termos no número de onda horizontal kx, uma dada profundidade de recepção zR, e uma frequência circular temporal ω.
Na caixa 32, uma densidade p do meio de propagação é obtida. Para uma unidade de fita sísmica marinha rebocada, o meio vai ser água.
Na caixa 33, um número de onda vertical kz, da energia incidente, é determinado para propagação em um plano vertical em linha (x, y), de modo que:

em que c é a velocidade de propagação de energia sísmica no meio. O caso 2D, expresso na Equação (3), é o caso ky = 0 no caso 3D mais geral apresentado por:
Na caixa 34, uma função fantasma de pressão gvz é determinada. Nessa concretização particular sendo ilustrada, a função fantasma de pressão gvz é apresentada como uma função de kz e zR por:
= (4)
Na caixa 35, uma função fantasma de velocidade vertical gvz é determinada. Nessa concretização particular sendo ilustrada, a função fantasma de velocidade vertical gvz é apresentada como uma função de kz e zR por;
gp (z S »kz ) - 1 + . (5)
Na caixa 36, um sinal de sensor de velocidade vertical calculado Vz cal é determinado. Nessa concretização particular sendo ilustrada, o sinal de sensor de velocidade vertical calculado V^1 é determinado por uso da densidade p da caixa 34, e da função fantasma de velocidade vertical gvz, da caixa 35. O sinal de sensor de velocidade vertical calculado Vz ca/ é apresentado para o caso 2D por:
V } gp V x )
A Equação (6) é uma concretização particular da Equação (1) para um valor particular para o fator F. A versão 3D da Equação (6) é apresentada como:
gp
O fator apresentado pela razão de funções fantasma, gVt gp no lado direito da Equação (6) garante que o termo do lado direito, embora baseado em um sinal de sensor de pressão, seja equivalente em forma de campo de onda, ao lado esquerdo da Equação (6), que é baseado em um sinal de sensor de velocidade vertical.
Na caixa 37, um sinal de sensor de velocidade vertical construído Vz con é determinado como uma combinação linear do sinal de sensor de pressão registrado P®0, da caixa 31, e do sinal de sensor de velocidade vertical calculado Vzcal, da caixa 36, usando um coeficiente de mistura, a. Nessa concretização particular sendo ilustrada, o sinal de sensor de velocidade vertical construído Vzcon é determinado usando a Equação (6) e é apresentado para o caso 2D por:
V } ωρ V 7
A Equação (7) é uma concretização particular da Equação (2). A versão 3D da Equação (7) é apresentada como:
A figura 4 mostra um fluxograma ilustrando uma concretização da invenção, para determinar um componente do campo de onda de pressão ascendente. Essa concretização particular foi referida na caixa 24 da figura
2.
Na caixa 41, um sinal de sensor de pressão registrado Prec é obtido. Nessa concretização particular sendo ilustrada, o sinal de sensor de pressão registrado Prec, (kx, zR, ω), é apresentado em termos do número de onda horizontal kx, uma dada profundidade de recepção zR, e uma frequência circular temporal ω.
Na caixa 42, um sinal de sensor de velocidade vertical construído Vz on é obtido. Nessa concretização particular sendo ilustrada, o sinal de sensor de velocidade vertical construído V/°n, (kx, zR, ω), é apresentado em termos de número de onda horizontal kx, profundidade de recepção zR, e frequência circular temporal ω. Uma concretização particular de um sinal de sensor de velocidade vertical construído Vz con é ilustrada pela discussão com referência ao fluxograma apresentado na figura 3 acima.
Na caixa 43, uma densidade p do meio de propagação é obtida. Para uma unidade de fita sísmica marinha rebocada, o meio vai ser água.
Na caixa 44, um número de onda vertical kx é determinado para propagação em um plano vertical em linha (x, y), de modo que a Equação (3) se mantém (como na caixa 33 da figura 3).
Na caixa 45, um componente do campo de onda de pressão ascendente Pp é determinado como metade de uma diferença do sinal de sensor de pressão registrado P^, da caixa 41, e do sinal de sensor de velocidade vertical construído Vz con, da caixa 42. Nessa concretização particular sendo ilustrada, o componente do campo de onda de pressão ascendente é determinado usando a densidade p da caixa 43 e o número de onda vertical kz da caixa 44, e é apresentado por:
ZI ' ' iç \ / (8)
A versão 3D da Equação (8) é apresentada como:
P^kJ^z*,^

G)
O componente do campo de onda de pressão ascendente Ρμρ e os componentes de campo de onda de velocidade vertical ascendentes e descendentes Vzup e yzdown t respectivamente, podem ser também obtidos por expressões análogas à Equação (8). A equação é igualmente aplicável para determinar quaisquer desses resultados do processo de decomposição. O uso do componente do campo de onda de pressão ascendente Ρρ é, nesse caso, para fins ilustrativos apenas, e não é intencionado como uma restrição da invenção.
A figura 5 mostra um fluxograma ilustrando uma concretização da invenção para determinar um valor do coeficiente de mistura, que minimize o erro. Essa concretização particular foi referida nas caixas 26 - 28 da figura 2.
Na caixa 51, o componente do campo de onda de pressão ascendente P“p é reformulado em termos do sinal de sensor de pressão registrado P™, do sinal de sensor de velocidade vertical total registrado Vzrec e do coeficiente de mistura, a. Nessa concretização particular, a reformulação é feita por substituição da Equação (7) na Equação (8) e por eliminação dos parâmetros 2D (kx, zR, ω) ou dos parâmetros 3D (kx, ky, zR, ω). Essa substituição produz:
a Sv1 prec gp
2Pup~Pree-^ (l-ã)·^
A invenção compreende a propagação de erros em quaisquer dos termos no lado direito da equação (9), para encontrar o erro consequente no campo de onda de pressão ascendente decomposto estimado Pup, seguida pela otimização da estimativa por ajuste do coeficiente de mistura, a, para obter o erro consequente mais baixo. A invenção não é limitada à Equaçâo (9), e também inclui o uso de equações funcionalmente similares oriundas de diferentes implementações de atenuação de ruído de baixa frequência e de decomposição de campo de onda.
Por exemplo, um erro sistemático na razão de funções fantasma, • 3 gp pode se originar, se a topografia do fundo do mar ou a profundidade de recepção não for uniforme com relação a x, e as funções fantasma não são adequadamente representadas pelas Equações (4) e (5), ou se a energia incidente inclui um componente ky diferente de zero, perpendicular à unidade de fita sísmica, de modo que kz não seja obtido com precisão da Equação (3). A presença desses, ou outros, erros podem tornar todos os termos de sinais de sensores registrados P™ ou Vz rec mais ou menos desejáveis na Equação (7), e a mistura que gera o erro consequente mínimo na decomposição pode ser obtida por ajuste do coeficiente de mistura, a, para dados ω e kx.
Na caixa 52, os erros nos termos no lado direito da Equação (9) são propagados, para determinar os erros no componente do campo de onda de pressão ascendente Ρ“ρ, no lado esquerdo da Equação (9), na caixa 51. Nessa concretização particular, na qual o ruído de medida é a única fonte de erro, o ruído é considerado como variâncias em cada termo da Equação (9). Esse tratamento de ruído produz:
i2
1+a^ 7ατΓρ™1 gP L J / \2 (10) em que Varf*] designa a variância.
Na caixa 53, um valor do coeficiente de mistura, a, é determinado, que minimiza a variância do componente do campo de onda de pressão ascendente, VarlP^], no lado esquerdo da Equação (10), na caixa 52. A redisposição dos termos na Equação (10), a diferenciação com relação ao coeficiente de mistura, a, e o ajuste de da a zero produz o valor para a, que proporciona Var[Pup] mínimo:

(11)
Na caixa 54, o coeficiente de mistura, α, é avaliado por substituição da seguinte forma para a Equação (11):
(12) em que N[*] designa o nível de ruído médio quadrático, obtido de um registro de ruído puro ou por estimativa dos dados. No presente caso, Vz rec é o sinal do sensor de velocidade vertical registrado, e Vz cal é o sinal do sensor de velocidade vertical equivalente obtido inteiramente por cálculo (remoção de fantasma de superfície do fundo do mar plana) do sinal do sensor de pressão. Na prática, a Equação (12) é o procedimento mais direto para avaliar a Equação (11).
As figuras 6-10 mostram gráficos de processos particulares de ilustração de sinal e ruído relativos nos fluxogramas nas figuras 1 - 5. Em particular, as figuras 6-10 ilustram o caso particular, no qual o ruído de medida é a única fonte de erro.
A figura 6 é um gráfico de sinal e ruído para sinais do sensor de pressão e do sensor de velocidade vertical registrados. Em particular, a figura 6 mostra os sinais para o sinal de sensor de pressão registrado P™0 61 (linha tracejada) e o sinal de sensor de velocidade vertical total registrado Vzrec 62 (linha pontilhada), e o ruído para o sinal de sensor de pressão registrado Proc 64 (linha tracejada). Os sinais 61, 62 e o ruído 63, 64, para ambos os sensores, são mostrados como registrados a uma incidência vertical, e com 0 dB, como o nível de referência de um sinal ascendente em cada um dos sensores. Com o intuito de simplicidade de ilustração, o ruído 63 em Prec é especificado a um nível constante de -12 dB, e o ruído 64 em Vzrec é especificado a -6 dB, em todas as frequências. Na prática, o ruído 64 em Vzrec vai aumentar no sentido de 0 Hz, e o processo de substituição em baixa frequência vai agir basicamente abaixo do segundo entalhe fantasma P®0, que está a cerca de 50 Hz nesse exemplo, com uma profundidade de registro de
m.
A figura 7 mostra um gráfico do coeficiente de mistura, a, 71 (linha sólida), determinado pelo método da invenção para o cenário de ruído, ilustrado na figura 6. Em particular, o coeficiente de mistura, a, ótimo é determinado por aplicação da Equação (12). Quando o coeficiente de mistura, cc = 0, então νζ°°η vai consistir inteiramente de Vzrec. Quando o coeficiente de mistura, cc = 1, então Vzcon vai consistir inteiramente de Vzcal, o sinal e o ruído equivalentes construídos de Prec.
A figura 8 mostra um gráfico do sinal de sensor de velocidade vertical construído Vz con 81 (linha tracejada), que é a soma das duas contribuições de sinal dos sinais dos sensores de velocidade vertical e de pressão registrados. Também são mostradas as duas contribuições de ruído individuais para Vz con do sinal de sensor de velocidade vertical total registrado Vkc Q2 (linha pontilhada) e do sinal de sensor de pressão registrado 83 (linha sólida).
De modo similar, a figura 9 mostra um gráfico do componente do campo de onda de pressão ascendente Pup 91 (linha tracejada), que é a soma das duas contribuições de sinais dos sensores de velocidade vertical e de pressão registrados. Também são mostradas as duas contribuições de ruído individuais para Pup do sinal de sensor de velocidade vertical total registrado Vz rec 92 (linha pontilhada) e do sinal de sensor de pressão registrado Prec 93 (linha sólida). O termo de ruído P™ 93 inclui a parte de Vf°n, que vem do P50, antes da combinação de Pec e V^°n para formar Ρμρ.
A figura 10 mostra um gráfico de sinal 101 (linha tracejada) e ruído para o componente do campo de onda de pressão ascendente Pjp para três cálculos do coeficiente de mistura, α. O ruído Pup total é mostrado para o coeficiente de mistura, a, calculado pelo método da invenção 102 (linha sólida) e mostrado na Figura 7, acima. O ruído Pup é também mostrado para dois outros cálculos ligeiramente abaixo da otimização, para comparação.
Em um cálculo 103 (linha tracejada), o ruído Vz con no denominador das Equações (11) e (12) foi multiplicado por dois, para produzir um valor menor para a, enquanto que no outro cálculo 104 (linha pontilhada), o ruído Vz con foi dividido por dois, para produzir um valor maior para α. O valor para α produzido pelo método da invenção 102 produz o ruído mais baixo em todas as frequências.
A invenção pode usar o coeficiente de mistura, a, derivado não apenas para determinar uma combinação abaixo da otimizada das medidas de cada sensor, mas também como uma ferramenta para análise da importância relativa de ruído e outras fontes de erro, na atenuação de ruído de baixa frequência e na decomposição de campo de onda. A invenção pode também aplicar o mesmo procedimento de otimização e propagação de erros em outras implementações, por exemplo, em diferentes domínios e em duas ou três dimensões. A invenção inclui ainda quaisquer outras aproximações ao caso geral ilustrado no presente relatório descritivo, por exemplo, considerando apenas certas fontes ou assumindo ângulos de incidência verticais ou limitados, de modo que o valor derivado de α seja apenas uma função de ω e não de kx.
Deve-se entender que o que foi exposto acima é meramente uma descrição detalhada das concretizações específicas dessa invenção, e as várias mudanças, modificações e alternativas para as concretizações descritas podem ser feitas de acordo com o presente relatório descritivo, sem afastar-se do âmbito da invenção. A descrição precedente não é, portanto, mencionada para limitar o âmbito da invenção. Em vez disso, o âmbito da invenção vai ser determinado apenas pelas reivindicações em anexo e seus equivalentes.
Claims (18)
- REIVINDICAÇÕES1. Método para prospecção geográfica, caracterizado por compreender:depositar sensores de velocidade vertical e de pressão em uma fita sísmica em um corpo de água, em resposta aos sinais recebidos dos sensores de velocidade vertical e de pressão, calcular os traços sísmicos representando campos de onda físicos no corpo de água incidente nos sensores; e transformar os traços sísmicos para produzir traços de velocidade vertical representando os campos de velocidade vertical com ruído de baixa freqüência atenuado, a transformação compreendendo:determinar um traço de sensor de velocidade vertical calculado de um traço de sensor de pressão registrado;determinar um traço de sensor de velocidade vertical construído como uma combinação linear do traço de sensor de velocidade vertical calculado e de um traço de sensor de velocidade vertical registrado, por uso de um coeficiente de mistura como uma constante de proporcionalidade;determinar um componente do campo de onda de pressão ascendente como metade de uma diferença do traço de sensor de pressão registrado e do traço de sensor de velocidade vertical construído, como uma função do coeficiente de mistura;determinar um erro no componente do campo de onda de pressão ascendente por propagação de erros em ternos do traço de sensor de pressão registrado e do traço de sensor de velocidade vertical construído; e determinar um valor do coeficiente de mistura que minimiza o erro componente do campo de onda de pressão ascendente; e gravar o traço de sensor de velocidade vertical construído.
- 2. Método de acordo com a reivindicação 1, caracterizado pelo fato de que determinar o sinal de sensor de velocidade vertical calculado compreende, inicialmente:determinar uma profundidade de recepção; e obter o traço de sensor de pressão registrado e o traço de sen2 sor de velocidade vertical registrado na profundidade de recepção.
- 3. Método de acordo com a reivindicação 1, caracterizado pelo fato de que os sensores de pressão compreendem hidrofones.
- 4. Método de acordo com a reivindicação 1, caracterizado pelo fato de que os sensores de velocidade vertical compreendem geofones verticais.
- 5. Método de acordo com a reivindicação 2, caracterizado pelo fato de que determinar o traço de sensor de velocidade vertical calculado compreende ainda:obter uma densidade de meio de propagação;determinar um número de onda vertical da frequência circular temporal, da velocidade de propagação no meio e do número de onda horizontal;determinar uma função fantasma de pressão do número de onda vertical e da profundidade de recepção;determinar uma função fantasma de velocidade vertical do número de onda vertical e da profundidade de recepção; e determinar o traço de sensor de velocidade vertical calculado usando a densidade, o número de onda vertical, a função fantasma de pressão e a função fantasma de velocidade vertical.
- 6. Método de acordo com a reivindicação 5, caracterizado pelo fato de que o número de onda vertical, kx, é determinado, no caso bidimensional, por aplicação da seguinte equação:
 em que ω é a frequência circular temporal, c é a velocidade de propagação de energia sísmica no meio, e kx é o número de onda horizontal na direção em linha.
em que ω é a frequência circular temporal, c é a velocidade de propagação de energia sísmica no meio, e kx é o número de onda horizontal na direção em linha. - 7. Método de acordo com a reivindicação 5, caracterizado pelo fato de que o número de onda vertical, kx, é determinado, no caso tridimensional, por aplicação da seguinte equação:^.25^4em que ω é a frequência circular temporal, c é a velocidade de propagação de energia sísmica no meio, kx é o número de onda horizontal na direção em linha e ky é o número de onda horizontal na direção transversal.
- 8. Método de acordo com a reivindicação 6, caracterizado pelo fato de que a função fantasma de pressão, gp, é determinada por aplicação da seguinte equação:gp (ζ“ >kz ) =1 - exp[-2^.z* ], em que kz é o número de onda vertical e zR é a profundidade de recepção.
- 9. Método de acordo com a reivindicação 8, caracterizado pelo fato de que a função de velocidade vertical, gV2, é determinada por aplicação da seguinte equação:gp & fí ,kz ) = 1 + expt-2/^ z * ].
- 10. Método de acordo com a reivindicação 9, caracterizado pelo fato de que determinar o traço de sensor de velocidade vertical construído, Vz con, compreende aplicar a seguinte equação:Vzf kx, zR. ü)) = (1 - a) · Kree (k, zR, ώή - a — z* em que α é o coeficiente de mistura, Vz rec é o traço de sensor de velocidade vertical registrado, e P™ é o traço de sensor de pressão registrado.
- 11. Método de acordo com a reivindicação 10, caracterizado pelo fato de que para determinar o componente do campo de onda de pressão ascendente, usa-se a densidade e o número de onda vertical.
- 12. Método de acordo com a reivindicação 11, caracterizado pelo fato de que determinar o componente do campo de onda de pressão ascendente, Pup, compreende aplicar a seguinte equação:zR,&Λ, em que P™ é o traço de sensor de pressão registrado, e \/z con é o traço de sensor de velocidade vertical construído.
- 13. Método de acordo com a reivindicação 1, caracterizado pelo fato de que determinar um erro no componente do campo de onda de pressão ascendente compreende:reformular o componente do campo de onda de pressão ascendente em termos do traço de sensor de pressão registrado, do traço de sensor de velocidade vertical registrado e do coeficiente de mistura;propagar erros nos termos do traço de sensor de pressão registrado e do traço de sensor de velocidade vertical registrado, para obter as variâncias nos termos do componente do campo de onda de pressão ascendente, do traço de sensor de pressão registrado e no traço de sensor de velocidade vertical registrado;diferenciar as variâncias com relação ao coeficiente de mistura;determinar o valor do coeficiente de mistura, que minimiza o erro no componente do campo de onda de pressão ascendente, por ajuste da derivada da variância do componente do campo de onda de pressão ascendente a zero.
- 14. Método de acordo com a reivindicação 13, caracterizado pe- lo fato de que a reformulação do componente do campo de onda de pressão ascendente compreende aplicar a seguinte equação:ωρ a gP
- 15. Método de acordo com a reivindicação 14, caracterizado pelo fato de que a propagação de erros, para obter as variâncias, compreende aplicar a seguinte equação:
1 + a—- 2 Var[Prec]+ fei-a)! SP em que Var[.] designa a variância. - 16. Método de acordo com a reivindicação 15, caracterizado pe- lo fato de que determinar o valor do coeficiente de mistura, que minimiza o erro no componente do campo de onda de pressão ascendente, compreende aplicar a seguinte equação:


- 17. Método de acordo com a reivindicação 16, caracterizado pelo fato de que determina o valor do coeficiente de mistura, que minimiza o erro no componente do campo de onda de pressão ascendente, compreende aplicar a seguinte equação:
 em que N[] designa o nível de ruído médio quadrático, Vzrec é o sinal de sensor de velocidade vertical registrado, e Vz ca/ é o sinal de sensor de velocidade vertical equivalente, obtido por remoção de fantasma de fundo do mar do sinal de sensor de pressão.
em que N[] designa o nível de ruído médio quadrático, Vzrec é o sinal de sensor de velocidade vertical registrado, e Vz ca/ é o sinal de sensor de velocidade vertical equivalente, obtido por remoção de fantasma de fundo do mar do sinal de sensor de pressão. - 18. Método para prospecção geográfica, caracterizado por compreender:depositar sensores de velocidade vertical e de pressão em uma fita sísmica em um corpo de água, em resposta aos sinais recebidos dos sensores de velocidade vertical e de pressão, calcular os traços sísmicos representando campos de onda físicos no corpo de água incidente nos sensores; e transformar os traços sísmicos para produzir traços de velocidade vertical representando os campos de velocidade vertical com ruído de baixa freqüência atenuado, a transformação compreendendo:determinar um sinal de sensor de velocidade vertical calculado de um traço de sensor de pressão registrado;determinar um traço de sensor de velocidade vertical construído como uma combinação linear do traço de sensor de velocidade vertical cal culado e de um traço de sensor de velocidade vertical registrado, por uso de um coeficiente de mistura como uma constante de proporcionalidade;determinar um componente do campo de onda de pressão descendente como metade de uma diferença do traço de sensor de pressão 5 registrado e do traço de sensor de velocidade vertical construído, como uma função do coeficiente de mistura;determinar um erro no componente do campo de onda de pressão descendente por propagação de erros nos termos do traço de sensor de pressão registrado e do traço de sensor de velocidade vertical construído; e 10 determinar um valor do coeficiente de mistura que minimiza o erro componente do campo de onda de pressão descendente, gravar o traço de sensor de velocidade vertical construído.1/8
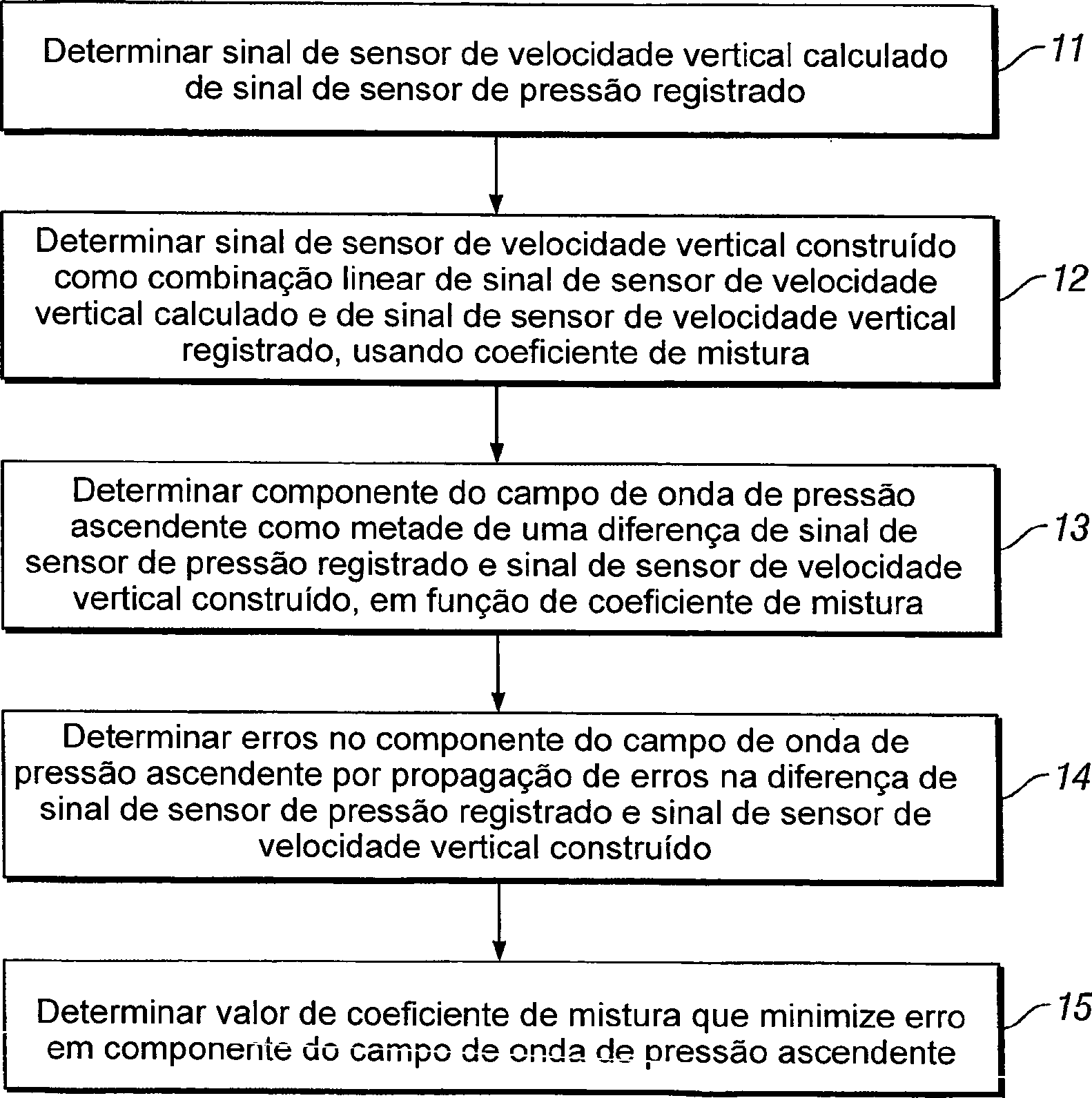 FIG. 12/8
FIG. 12/8Determinar uma profundidade de recepção Obter sinais de sensores de pressão e velocidade vertical regjstrados na profundidade de recepção /-22 ... Determinar sinal de sensor de velocidade vertical calculado de sinal de sensor de pressão registrado /23 Determinar sinal de sensor de velocidade vertical construído como combinação linear de sinais de sensores de pressão e de velocidade vertical registrados, por uso de coeficiente de mistura y^~24 Determinar componente do campo de onda de pressão ascendente como metade de uma diferença de sinais de sensor de pressão registrado e de sensor de velocidade vertical construído, em função de coeficiente de mistura Reformular componente do campo de onda de pressão ascendente em termo de sinal de sensor de pressão registrado, sinal de sensor de velocidade vertical registrado e coeficiente de mistura ^-26 Propagar erros nos termos reformulados do sinal de sensor de pressão registrado e sinal de sensor de velocidade vertical registrado, para determinar erro em componente do campo de onda de pressão ascendente ’ < Determinar valor de coeficiente de mistura que minimize erro em componente do campo de onda de pressão ascendente έ-Ό ._______ ’ Substituir valor de coeficiente de mistura, que minimiza erro em componente do campo de onda de pressão ascendente reformulado ^29 FIG. 23/8Obter sinal de sensor de pressão registrado e sinal de sensor de velocidade vertical registrado na profundidade de recepção admitida Obter densidade de meio de propagaçao 1 Determinar número de onda vertical de energia incidente Determinar função fantasma de pressão de número de onda 1 vertical e profundic ade de recepção | Determinar função fantasma de velocidade vertical de número de onda vertical e profundidade de recepção Determinar sinal de sensor de velocidade vertical calculado de sinal de sensor de pressão registrado por uso de densidade, número de onda vertical, função fantasma de pressão e função fantasma de velocidade vertical Determinar sinal de sensor de ve uma combinação linear de sinal d sinal de sensor de velocidade v coeficiente ocidade vertical construído como e sensor de pressão registrado e ertical calculado, em função de de mistura FIG. 34/8 FIG. 45/8Reformular componente do campo de onda de pressão ascendente em termos de sinal de sensor de pressão registrado, sinal de sensor de velocidade vertical registrado e coeficiente de misturaPropagar erros nos termos reformulados do sinal de sensor de pressão registrado e sinal de sensor de velocidade vertical registrado, y52 para determinar erro em componente do campo de onda de pressão ascendente, com obtenção de variânciasDeterminar valor de coeficiente de mistura que minimize erro em componente do campo de onda de pressão ascendente, por meio de diferenciação com relação ao coeficiente de mistura e ajuste de derivada igual a zero
FIG. 45/8Reformular componente do campo de onda de pressão ascendente em termos de sinal de sensor de pressão registrado, sinal de sensor de velocidade vertical registrado e coeficiente de misturaPropagar erros nos termos reformulados do sinal de sensor de pressão registrado e sinal de sensor de velocidade vertical registrado, y52 para determinar erro em componente do campo de onda de pressão ascendente, com obtenção de variânciasDeterminar valor de coeficiente de mistura que minimize erro em componente do campo de onda de pressão ascendente, por meio de diferenciação com relação ao coeficiente de mistura e ajuste de derivada igual a zero i;Avaliar coeficiente de mistura por substituição dos níveis de ruído médio quadrático pelas variâncias
i;Avaliar coeficiente de mistura por substituição dos níveis de ruído médio quadrático pelas variâncias
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US12/151,488 US7957906B2 (en) | 2008-05-07 | 2008-05-07 | Method for attenuating low frequency noise in a dual-sensor seismic streamer |
| PCT/GB2009/001131 WO2009136156A1 (en) | 2008-05-07 | 2009-05-06 | Method for attenuating low frequency noise in a dual-sensor seismic streamer |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| BRPI0915128A2 true BRPI0915128A2 (pt) | 2019-09-17 |
Family
ID=41057532
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| BRPI0915128A BRPI0915128A2 (pt) | 2008-05-07 | 2009-05-06 | método para atenuar ruído de baixa frequência em uma fita sísmica de sensor duplo |
Country Status (12)
| Country | Link |
|---|---|
| US (1) | US7957906B2 (pt) |
| EP (1) | EP2286277B1 (pt) |
| CN (1) | CN102016643B (pt) |
| AT (1) | ATE532088T1 (pt) |
| BR (1) | BRPI0915128A2 (pt) |
| CA (1) | CA2723182C (pt) |
| DK (1) | DK2286277T3 (pt) |
| EA (1) | EA022172B1 (pt) |
| EG (1) | EG26311A (pt) |
| MX (1) | MX2010012105A (pt) |
| MY (1) | MY155791A (pt) |
| WO (1) | WO2009136156A1 (pt) |
Families Citing this family (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8089825B2 (en) * | 2008-08-29 | 2012-01-03 | Pgs Geophysical As | Method of summing dual-sensor towed streamer signals using cross-ghosting analysis |
| US8699297B2 (en) * | 2009-02-13 | 2014-04-15 | Westerngeco L.L.C. | Deghosting and reconstructing a seismic wavefield |
| US20100211320A1 (en) * | 2009-02-13 | 2010-08-19 | Massimiliano Vassallo | Reconstructing a seismic wavefield |
| US8554484B2 (en) * | 2009-02-13 | 2013-10-08 | Westerngeco L.L.C. | Reconstructing seismic wavefields |
| US10545252B2 (en) * | 2010-01-15 | 2020-01-28 | Westerngeco L.L.C. | Deghosting and interpolating seismic data |
| US8902699B2 (en) * | 2010-03-30 | 2014-12-02 | Pgs Geophysical As | Method for separating up and down propagating pressure and vertical velocity fields from pressure and three-axial motion sensors in towed streamers |
| US8693282B2 (en) * | 2010-05-25 | 2014-04-08 | Westerngeco L.L.C. | Deghosting seismic data |
| US9442209B2 (en) | 2012-07-10 | 2016-09-13 | Pgs Geophysical As | Methods and systems for reconstruction of low frequency particle velocity wavefields and deghosting of seismic streamer data |
| US9201869B2 (en) | 2012-08-28 | 2015-12-01 | Oracle International Corporation | Contextually blind data conversion using indexed string matching |
| US9070090B2 (en) | 2012-08-28 | 2015-06-30 | Oracle International Corporation | Scalable string matching as a component for unsupervised learning in semantic meta-model development |
| US9405028B2 (en) | 2013-02-22 | 2016-08-02 | Ion Geophysical Corporation | Method and apparatus for multi-component datuming |
| US9322944B2 (en) | 2013-03-15 | 2016-04-26 | Pgs Geophysical As | Wavefield regularization by 3-D wavefield decomposition for geophysical data |
| AU2014201420A1 (en) * | 2013-03-22 | 2014-10-09 | Cgg Services Sa | Method and device for attenuating random noise in seismic data |
| WO2015145256A2 (en) * | 2014-03-28 | 2015-10-01 | Cgg Services Sa | Methods and data processing apparatus for cooperative de-noising of multi-sensor marine seismic data |
| GB2530410A (en) * | 2014-08-29 | 2016-03-23 | Pgs Geophysical As | Methods and systems to remove particle-motion-sensor noise from vertical-velocity data |
| US9964656B2 (en) | 2014-08-29 | 2018-05-08 | Pgs Geophysical As | Methods and systems to remove particle-motion-sensor noise from vertical-velocity data |
| WO2016154104A1 (en) * | 2015-03-20 | 2016-09-29 | Schlumberger Technology Corporation | Single streamer deghosting with extended model space |
| US20170160414A1 (en) * | 2015-12-07 | 2017-06-08 | Cgg Services Sa | Method and device for simultaneously attenuating noise and interpolating seismic data |
| US10482128B2 (en) | 2017-05-15 | 2019-11-19 | Oracle International Corporation | Scalable approach to information-theoretic string similarity using a guaranteed rank threshold |
| US10885056B2 (en) | 2017-09-29 | 2021-01-05 | Oracle International Corporation | Data standardization techniques |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5365492A (en) * | 1993-08-04 | 1994-11-15 | Western Atlas International, Inc. | Method for reverberation suppression |
| GB9906456D0 (en) | 1999-03-22 | 1999-05-12 | Geco Prakla Uk Ltd | Method and system for reducing effects of sea surface ghost contamination in seismic data |
| US7359283B2 (en) * | 2004-03-03 | 2008-04-15 | Pgs Americas, Inc. | System for combining signals of pressure sensors and particle motion sensors in marine seismic streamers |
| US7676327B2 (en) | 2007-04-26 | 2010-03-09 | Westerngeco L.L.C. | Method for optimal wave field separation |
| US20090040872A1 (en) | 2007-08-09 | 2009-02-12 | Jahir Pabon | Removing Vibration Noise from Multicomponent Streamer Measurements |
-
2008
- 2008-05-07 US US12/151,488 patent/US7957906B2/en not_active Expired - Fee Related
-
2009
- 2009-05-06 EA EA201071267A patent/EA022172B1/ru not_active IP Right Cessation
- 2009-05-06 MX MX2010012105A patent/MX2010012105A/es active IP Right Grant
- 2009-05-06 BR BRPI0915128A patent/BRPI0915128A2/pt active Search and Examination
- 2009-05-06 CN CN200980116876XA patent/CN102016643B/zh not_active Expired - Fee Related
- 2009-05-06 CA CA2723182A patent/CA2723182C/en not_active Expired - Fee Related
- 2009-05-06 EP EP09742352A patent/EP2286277B1/en not_active Not-in-force
- 2009-05-06 AT AT09742352T patent/ATE532088T1/de active
- 2009-05-06 DK DK09742352.9T patent/DK2286277T3/da active
- 2009-05-06 MY MYPI2010005068A patent/MY155791A/en unknown
- 2009-05-06 WO PCT/GB2009/001131 patent/WO2009136156A1/en not_active Ceased
-
2010
- 2010-11-02 EG EG2010111850A patent/EG26311A/en active
Also Published As
| Publication number | Publication date |
|---|---|
| DK2286277T3 (da) | 2012-01-02 |
| US7957906B2 (en) | 2011-06-07 |
| EG26311A (en) | 2013-07-17 |
| CN102016643B (zh) | 2013-07-17 |
| AU2009245480A1 (en) | 2009-11-12 |
| EP2286277B1 (en) | 2011-11-02 |
| CN102016643A (zh) | 2011-04-13 |
| CA2723182C (en) | 2015-04-14 |
| US20090281732A1 (en) | 2009-11-12 |
| ATE532088T1 (de) | 2011-11-15 |
| EA022172B1 (ru) | 2015-11-30 |
| EA201071267A1 (ru) | 2011-06-30 |
| WO2009136156A1 (en) | 2009-11-12 |
| EP2286277A1 (en) | 2011-02-23 |
| MX2010012105A (es) | 2010-11-30 |
| MY155791A (en) | 2015-11-30 |
| CA2723182A1 (en) | 2009-11-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| BRPI0915128A2 (pt) | método para atenuar ruído de baixa frequência em uma fita sísmica de sensor duplo | |
| US8760965B2 (en) | Time lapse marine seismic surveying employing interpolated multicomponent streamer pressure data | |
| US7986586B2 (en) | Method for deghosting marine seismic streamer data with irregular receiver positions | |
| AU2012240355B2 (en) | Noise attenuation using rotation data | |
| US9229123B2 (en) | Method for handling rough sea and irregular recording conditions in multi-sensor towed streamer data | |
| BRPI0902827B1 (pt) | Método para prospecção geofísica | |
| BRPI0500722B1 (pt) | Sistema para combinar sinais de sensores de pressão e sensores de movimento de partícula em serpentinas sísmicas marinhas | |
| US20090161487A1 (en) | Technique and system to cancel noise in measurements provided by sensors of a multi-component streamer | |
| BRPI1006934B1 (pt) | método para separação de campos de onda para dados de sensores de função dupla usando tratamento de dados e migração do tipo kirchhoff | |
| BRPI1101394A2 (pt) | mÉtodo para separar campos de pressço e de velocidade vertical de propagaÇço ascendente e descendente de sensores de pressço e movimento triaxial em tiras rebocadas | |
| CA2851597A1 (en) | Wavefield separation using a gradient sensor | |
| BRPI0903062B1 (pt) | método implementado por computador para separação de campo de onda e sistema para separação de campo de onda | |
| BR102013023972A2 (pt) | Método e aparelho para atenuação de ruído de interferência | |
| BRPI0902474B1 (pt) | método para combinar sinais de pressão e de velocidade vertical de partícula em cabos sísmicos rebocáveis de duplo sensor | |
| WO2012141805A2 (en) | Stable shot illumination compensation | |
| BR102012007972A2 (pt) | Método para eliminação de restrições espectriais de sistema de aquisição e efeitos de filtração na terra | |
| US11385373B2 (en) | Method for determining sensor depths and quality control of sensor depths for seismic data processing | |
| US20130107664A1 (en) | Processing multi-component seismic data | |
| US7742876B2 (en) | Wavefield decomposition for cross-line survey | |
| BR102012032227A2 (pt) | Separação de campos de onda para registradores sísmicos distribuídos em superfícies de registro não planas | |
| US20220137248A1 (en) | Computing program product and method for prospecting and eliminating surface-related multiples in the beam domain with deghost operator | |
| AU2009245480B2 (en) | Method for attenuating low frequency noise in a dual-sensor seismic streamer | |
| Minshull et al. | Analysis of gas-hydrate provinces by ocean-bottom seismic methods | |
| Tikhonov et al. | Borehole vicinity acoustic properties study using offset VSP data | |
| AU2017295827A1 (en) | Method for determining sensor depths and quality control of sensor depths for seismic data processing |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| B06F | Objections, documents and/or translations needed after an examination request according [chapter 6.6 patent gazette] | ||
| B06U | Preliminary requirement: requests with searches performed by other patent offices: procedure suspended [chapter 6.21 patent gazette] | ||
| B09A | Decision: intention to grant [chapter 9.1 patent gazette] | ||
| B11D | Dismissal acc. art. 38, par 2 of ipl - failure to pay fee after grant in time | ||
| B350 | Update of information on the portal [chapter 15.35 patent gazette] |