(54) Título: DIFERENCIAL (51) Int.CI.: F16H 57/08; F16H 48/10.
(30) Prioridade Unionista: 17/06/2009 US 61/187,764.
(73) Titular(es): EATON CORPORATION.
(72) Inventor(es): STEPHEN RADZEVICH; PAUL NORMAN HERRMANN.
(86) Pedido PCT: PCT IB2010001450 de 16/06/2010 (87) Publicação PCT: WO 2010/146444 de 23/12/2010 (85) Data do Início da Fase Nacional: 16/12/2011 (57) Resumo: DIFERENCIAL Um diferencial (10) inclui uma engrenagem-satélite (14) compreendendo uma coroa de face helicoidal, um pinhão helicoidal (16) configurado para engrenamento com a engrenagem-satélite, um alojamento de pinhão (18) configurado para alojar o pinhão helicoidal; e um primeiro membro suporte (20) configurado para suportar o pinhão helicoidal. A engrenagem-satélite gira ao redor de um eixo geométrico de diferencial (22). O pinhão helicoidal tem uma primeira extremidade (24) e uma segunda extremidade (26) oposta à primeira extremidade. O alojamento de pinhão compreende um anel geralmente anular e inclui uma superfície radial externa (28); uma superfície radial interna (30); e uma abertura (32) se estendendo radialmente para dentro a partir da superfície radial externa. O primeiro membro suporte é disposto radialmente para dentro em relação à superfície radial interna do alojamento de pinhão. Em algumas configurações, o diferencial inclui adicionalmente um segundo membro suporte (46) configurado para suportar o pinhão helicoidal. O segundo membro suporte é disposto radialmente para fora em relação à superfície radial externa do alojamento de pinhão.
1/22
DIFERENCIAL
Campo técnico [0001] A presente invenção se relaciona com um diferencial incluindo uma primeira engrenagem compreendendo uma coroa de face helicoidal, uma segunda engrenagem compreendendo um pinhão helicoidal configurado para estar em engrenamento com a coroa de face helicoidal, um alojamento de pinhão configurado para alojar o pinhão helicoidal, e um membro de suporte configurado para suportar o pinhão helicoidal. Antecedentes [0002] Engrenagens de face helicoidal para uso em diferenciais são conhecidas na técnica, como registrado por exemplo nas patentes U.S. nos 3.253.483 e 4.791.832. Entretanto, a incorporação de engrenagens de face helicoidal em diferenciais não tem sido comumente utilizada por causa de, por exemplo, desafios com relação à resistência das engrenagens, o custo para fabricar componentes de engrenagem com tolerâncias aceitáveis, e a dificuldade em garantir compartilhamento igual de torque entre os componentes da engrenagem.
[0003] Em um diferencial incluindo uma coroa de face helicoidal, um pinhão helicoidal, e um alojamento de pinhão, o diferencial pode ser configurado para dividir torque entre múltiplos pinhões helicoidais que podem ser dispostos dentro do alojamento de pinhão. O alojamento de pinhão pode compreender um anel geralmente anular tendo pelo menos uma abertura se estendendo radialmente para dentro a partir de uma superfície radial externa do alojamento de pinhão. Cada abertura pode compreender uma abertura cega que é fechada por uma parede definindo uma superfície radial interna do
Petição 870190046850, de 20/05/2019, pág. 14/47
2/22 alojamento de pinhão. Um pinhão helicoidal pode ser disposto em cada abertura cega. Cada pinhão helicoidal pode incluir uma protuberância em uma extremidade do pinhão helicoidal que é projetada com o propósito de pilotar ou guiar o pinhão dentro do alojamento de pinhão. A protuberância pode se estender na direção ao longo do eixo geométrico longitudinal do pinhão helicoidal. A protuberância pode ser de diâmetro menor que o diâmetro do pinhão helicoidal. O pequeno diâmetro da protuberância pode resultar em uma pilotagem relativamente fraca do pinhão helicoidal. A extremidade do pinhão helicoidal que inclui a protuberância pode estar em contato com a parede do alojamento de pinhão que define uma superfície radial interna do alojamento de pinhão. Devido à fricção entre as superfícies de contato da extremidade do pinhão helicoidal e o alojamento de pinhão, calor pode ser gerado. A troca de calor entre os componentes do diferencial pode ser fraca devido à parede fina do alojamento de pinhão na área de contato com o pinhão helicoidal. Em adição, os componentes de engrenagem podem encontrar erros causados pela fabricação de componentes de engrenagem, pela montagem do diferencial, e/ou pela deformação de componentes de engrenagem sob uma carga operacional, todos os quais podem ser inevitáveis e podem provocar compartilhamento desigual de torque entre os pinhões de um diferencial. Quando existir compartilhamento de torque desigual entre os pinhões de um diferencial, isto pode resultar em baixa capacidade de torque. Em adição, o uso de uma abertura cega pode resultar em fabricação mais difícil do alojamento de pinhão. Devido ao eixo geométrico longitudinal da abertura cega poder necessitar estar alinhado com o eixo geométrico longitudinal
Petição 870190046850, de 20/05/2019, pág. 15/47
3/22 do próprio pinhão helicoidal bem como o eixo geométrico da protuberância no pinhão helicoidal, as tolerâncias para o alojamento de pinhão e o pinhão helicoidal são muito apertadas, complicando adicionalmente a fabricação do diferencial.
[0004] Pode ser vantajoso melhorar a pilotagem do pinhão helicoidal no alojamento de pinhão e otimizar o compartilhamento de torque entre múltiplos pinhões helicoidais que podem estar dispostos no alojamento de pinhão, ambos os quais podem resultar em uma capacidade de torque significativamente maior do diferencial. Também pode ser vantajoso melhorar as condições de troca térmica nas áreas do diferencial onde fricção é gerada por causa das superfícies de contato do pinhão helicoidal e do alojamento de pinhão. Em adição, pode ser vantajoso melhorar a fabricabilidade do diferencial sem requerer mudanças custosas de métodos de fabricação para aumentar a precisão para a fabricação de pinhões helicoidais e o alojamento de pinhão pode não ser comercialmente viável na produção de alto volume de diferencial com conjuntos de engrenagens com torque dividido.
Sumário [0005] Um diferencial pode incluir uma engrenagem-satélite compreendendo uma coroa de face helicoidal; um pinhão helicoidal configurado para engrenamento com a engrenagemsatélite; um alojamento de pinhão configurado para alojar o pinhão helicoidal; e um primeiro membro de suporte configurado para suportar o pinhão helicoidal. A engrenagemsatélite pode girar ao redor de um eixo geométrico de diferencial. O pinhão helicoidal pode ter uma primeira
Petição 870190046850, de 20/05/2019, pág. 16/47
4/22 extremidade e uma segunda extremidade oposta à primeira extremidade. O alojamento de pinhão pode compreender um anel geralmente anular e pode incluir: uma superfície radial externa; uma superfície radial interna; e uma abertura se estendendo radialmente para dentro a partir da superfície radial externa. O primeiro membro de suporte pode ser disposto radialmente para dentro em relação à superfície radial interna do alojamento de pinhão. Em algumas configurações, o diferencial pode adicionalmente incluir um segundo membro de suporte configurado para suportar o pinhão helicoidal. O segundo membro de suporte pode ser disposto radialmente para fora em relação à superfície radial externa do alojamento de pinhão.
[0006] Um diferencial pode incluir uma engrenagem-satélite compreendendo uma coroa de face helicoidal; um pinhão helicoidal configurado para engrenamento com a engrenagemsatélite; um alojamento de pinhão configurado para alojar o pinhão helicoidal; um primeiro membro de suporte configurado para suportar o pinhão helicoidal; e um segundo membro de suporte configurado para suportar o pinhão helicoidal. A engrenagem-satélite pode girar ao redor de um eixo geométrico de diferencial. O pinhão helicoidal pode ter uma primeira extremidade e uma segunda extremidade oposta à primeira extremidade. O alojamento de pinhão pode compreender um anel geralmente anular e pode incluir: uma superfície radial externa; uma superfície radial interna; e uma abertura se estendendo radialmente para dentro a partir da superfície radial externa através da superfície radial interna tal que a abertura seja aberta em tanto uma primeira extremidade da abertura quanto uma segunda extremidade da abertura. A
Petição 870190046850, de 20/05/2019, pág. 17/47
5/22 segunda extremidade da abertura pode se opor à primeira extremidade da abertura. O primeiro membro de suporte pode contatar a primeira extremidade do pinhão helicoidal e pode ser disposto radialmente para dentro em relação à superfície radial interna do alojamento de pinhão. O segundo membro de suporte pode contatar a segunda extremidade do pinhão helicoidal e pode ser disposto radialmente para fora em relação à superfície radial externa do alojamento de pinhão. Descrição resumida dos desenhos [0007] Configurações da invenção serão agora descritas, por meio de exemplo, com referência aos desenhos anexos, onde:
[0008] A figura 1 é uma vista de seção transversal de um diferencial de acordo com uma configuração da invenção;
[0009] A figura 2 é uma vista de seção transversal de um diferencial de acordo com uma configuração da invenção;
[0010] A figura 3 é uma vista de seção transversal do diferencial da figura 2;
[0011] A figura 4 é uma vista de seção transversal frontal parcial do diferencial da figura 2;
[0012] A figura 5 é um desenho esquemático do deslocamento axial de pelo menos um pinhão helicoidal do diferencial da figura 4 no caso de desvios zero de fabricação;
[0013] A figura 6 é um desenho esquemático do deslocamento axial de pelo menos um pinhão helicoidal da figura 4 no caso de pelo menos alguns desvios de fabricação;
[0014] A figura 7 é uma vista de seção transversal frontal parcial do diferencial da figura 2;
[0015] A figura 8 é um desenho esquemático do deslocamento axial de pelo menos um pinhão helicoidal do diferencial da
Petição 870190046850, de 20/05/2019, pág. 18/47
6/22 figura 7 no caso de desvios zero de fabricação;
[0016] A figura 9 é um desenho esquemático do deslocamento axial de pelo menos um pinhão helicoidal do diferencial da figura 7 no caso de pelo menos alguns desvios de fabricação;
[0017] A figura 10 é uma vista de seção transversal lateral de um diferencial de acordo com uma configuração da invenção; e [0018] A figura 11 é uma vista de seção transversal lateral de um diferencial de acordo com uma configuração da invenção.
Descrição detalhada [0019] Referência será feita agora em detalhes a configurações da presente invenção, exemplos das quais estão descritos aqui e ilustrados nos desenhos anexos. Embora a invenção venha a ser descrita em conjunção com configurações, será entendido que elas não são intencionadas a limitar a invenção àquelas configurações. Pelo contrário, a invenção é intencionada a cobrir alternativas, modificações e equivalentes, que possam ser incluídas dentro do espírito e escopo da invenção como configurada pelas reivindicações anexas.
[0020] A figura 1 ilustra geralmente uma configuração do diferencial 10 mostrado de acordo com os ensinamentos da presente invenção. O diferencial 10 pode compreender uma carcaça de diferencial 12, uma engrenagem-satélite 14, um pinhão helicoidal 16, um alojamento de pinhão 18, e um primeiro membro de suporte 20 de acordo com uma configuração da invenção. A carcaça de diferencial 12 pode ser convencional na técnica e pode ser provida para alojar a engrenagem-satélite 14, pinhão helicoidal 16, alojamento de
Petição 870190046850, de 20/05/2019, pág. 19/47
7/22 pinhão 18, e primeiro membro de suporte 20, bem como qualquer número de outros componentes do diferencial 10.
[0021] A engrenagem-satélite 14 pode compreender uma coroa de face helicoidal. Consequentemente, a engrenagem-satélite 14 pode incluir um número de dentes helicoidais. O número de dentes helicoidais e a geometria do flanco do dente dos dentes helicoidais da engrenagem-satélite 14 podem variar de acordo com várias configurações da invenção. O uso de tecnologia de forjamento em lugar de tecnologia de usinagem para as engrenagens-satélite 14 pode melhorar significativamente a resistência das engrenagens-satélite 14. Consequentemente, as coroas de face helicoidal compreendendo as engrenagens-satélite 14 podem ser robustas e bem suportadas. O uso de coroas de face helicoidal de alta resistência pode permitir a aplicação de torque mais alto e prover uma faixa mais ampla de relações de pressão de torque. A engrenagem-satélite 14 pode girar ao redor de um eixo geométrico de diferencial 22. Uma primeira e segunda engrenagens-satélite 14 podem ser dispostas em lados opostos do alojamento de pinhão 18 de acordo com uma configuração da invenção. Cada engrenagem-satélite 14 pode incluir uma porção de cubo anular (não mostrada) com uma superfície radial interna que inclui uma pluralidade de estrias. A porção de cubo anular pode ser configurada para receber um eixo (não mostrado) de um veículo a motor tal que os eixos possam se conectar às engrenagens-satélite 14 através de uma interconexão estriada.
[0022] O pinhão helicoidal 16 pode ser configurado para engrenamento com a engrenagem-satélite 14. O pinhão helicoidal 16 pode ter uma primeira extremidade 24 e uma
Petição 870190046850, de 20/05/2019, pág. 20/47
8/22 segunda extremidade 26. A segunda extremidade 26 pode se opor à primeira extremidade 24. O pinhão helicoidal 16 pode incluir um número de dentes helicoidais. O número de dentes helicoidais e a geometria do flanco de dente dos dentes helicoidais do pinhão helicoidal 16 podem variar de acordo com várias configurações da invenção. O pinhão helicoidal 16 pode ser geralmente cilíndrico de acordo com uma configuração da invenção, embora o formato do pinhão helicoidal 16 possa variar de acordo com várias configurações da invenção. Pode haver uma pluralidade de pinhões 16 em algumas configurações da invenção. O número dos pinhões 16 no diferencial 10 pode variar. Entretanto, pode haver geralmente pelo menos dois pinhões 16. O número de pinhões 16 pode ser cerca de três ou quatro em uma configuração, embora mais ou menos pinhões 16 possam ser usados em outras configurações.
[0023] O alojamento de pinhão 18 pode ser configurado para alojar e/ou localizar o pinhão helicoidal 16. Em particular, o alojamento de pinhão 18 pode ser configurado para alojar e/ou localizar o pinhão helicoidal 16 para estar operativo ou em engrenamento com a engrenagem-satélite 14. De acordo com uma configuração da invenção, o alojamento de pinhão 18 pode ser configurado para alojar e/ou localizar múltiplos pinhões helicoidais 16. Os pinhões helicoidais 16 podem ser espaçados circunferencialmente ao redor da circunferência do alojamento de pinhão 18. O alojamento de pinhão 18 pode ser feito de uma peça de material (p.ex., compreender uma estrutura unitária, integral, e/ou monolítica) de acordo com uma configuração da invenção. O alojamento de pinhão 18 pode ter geralmente o formato de anel de acordo com uma configuração da invenção. Em particular, o alojamento de pinhão 18 pode compreender um
Petição 870190046850, de 20/05/2019, pág. 21/47
9/22 anel geralmente anular. O alojamento de pinhão 18 pode incluir uma superfície radial externa 28 e uma superfície radial interna 30. A superfície radial externa 28 pode se estender circunferencialmente ao redor do alojamento de pinhão 18. O alojamento de pinhão 18 também pode incluir uma abertura 32. De acordo com uma configuração da invenção, o alojamento de pinhão 18 pode incluir uma pluralidade de aberturas 32. Por exemplos somente, e sem limitações, pode haver aproximadamente três ou quatro aberturas 32 se estendendo através do alojamento de pinhão 18. Embora três ou quatro aberturas 32 sejam mencionadas em detalhes, pode haver menos ou mais aberturas 32 em outras configurações da invenção. As aberturas 32 podem ser equiangularmente espaçadas ao redor da circunferência do alojamento de pinhão 18. Embora as aberturas 32 sejam descritas como sendo equiangularmente espaçadas ao redor da circunferência do alojamento de pinhão 18, as aberturas 32 podem ser espaçadas em quaisquer arranjos e/ou configurações alternativas em outras configurações da invenção.
[0024] A abertura 32 pode ter um eixo geométrico que se estende substancialmente radialmente para fora a partir do centro aproximado do alojamento de pinhão 18. A abertura 32 pode se estender radialmente para dentro a partir da superfície radial externa 28. De acordo com uma configuração da invenção, a abertura 32 pode se estender a partir da superfície radial externa 28 do alojamento de pinhão 18 através da superfície radial interna 30 do alojamento de pinhão 18. Consequentemente, a abertura 32 pode ser aberta tanto em uma primeira extremidade 34 da abertura 32 quanto em uma segunda extremidade 36 da abertura 32. A primeira
Petição 870190046850, de 20/05/2019, pág. 22/47
10/22 extremidade 34 da abertura 32 pode se opor à segunda extremidade 32. Utilizando as aberturas 32 que podem ser usinadas através de todo o corpo do alojamento de pinhão 18, ao invés de compreender uma abertura cega, a fabricação do alojamento de pinhão 18 e a usinagem das aberturas 32 pode ser menos complexa. Por exemplo, as aberturas 32 podem ser usinadas em uma única etapa, o que pode eliminar uma fonte significativa de erros de fabricação. O pinhão helicoidal 16 pode ser disposto na abertura 32. A ausência de uma protuberância em uma extremidade do pinhão helicoidal 16, bem como a eliminação de uma fonte de erros de fabricação usinando em uma única preparação, pode permitir a pilotagem confiável e correta do pinhão helicoidal dentro da abertura 32. A pilotagem correta dos pinhões helicoidais 16 é crítica para a operação correta do diferencial 10. O número de pinhões helicoidais 16 pode corresponder geralmente ao número de aberturas 32 no alojamento de pinhão 18, embora menos pinhões 16 em relação ao número de aberturas 32 possam ser usados em configurações da invenção. Nestas configurações da invenção, pelo menos uma ou mais das aberturas 32 pode permanecer aberta. O tamanho dos pinhões 16 também pode variar, mas pode geralmente ser dimensionado de modo a se encaixar operativamente dentro das aberturas 32 do alojamento de pinhão 18 de modo a permitir os pinhões 16 ficarem livres para girar dentro das aberturas 32.
[0025] O alojamento de pinhão 18 pode compreender adicionalmente uma primeira face 38 e uma segunda face 40. A primeira face 38 pode se opor à segunda face 40. O alojamento de pinhão 18 pode incluir adicionalmente um canal 42 se estendendo a partir da primeira face 38 até a segunda face 40
Petição 870190046850, de 20/05/2019, pág. 23/47
11/22 do anel geralmente anular do alojamento de pinhão 18. O canal 42 pode ficar substancialmente radialmente alinhado com a abertura 32. Adicionalmente, o número de canais 42 pode corresponder geralmente ao número de aberturas 32 no alojamento de pinhão 18, embora menos ou mais canais 42 que o número de aberturas 32 possam ser usados em configurações da invenção. A face helicoidal de cada engrenagem-satélite 14 pode facear o alojamento de pinhão 18. As engrenagenssatélite 14 podem ser configuradas para estarem operativas ou em engrenamento com os pinhões 16. Em particular, os dentes helicoidais das engrenagens-satélite 14 podem estar operativos ou em engrenamento com os dentes helicoidais dos pinhões 16. Tanto os dentes helicoidais das engrenagenssatélite 14 quanto os dentes helicoidais dos pinhões 16 podem se estender para dentro dos canais 42 no alojamento de pinhão 18. Com um engrenamento configurado entre os pinhões 16 e as engrenagens-satélite 14, as engrenagens-satélite 14 podem ser forçadas a girar sobre seu próprio eixo-geométrico (isto é, eixo geométrico de diferencial 22). As engrenagens-satélite 14 podem ser configuradas para transmitir torque a partir dos pinhões 16 para uma saída (p.ex., eixos de um veículo a motor). Devido às saídas (p.ex., eixos) serem aterrados e acoplados às engrenagens-satélite 14, um veículo a motor incorporando o diferencial 10 pode se mover. Quando as engrenagens-satélite 14 giram em velocidades diferentes por aterramento através da saída (p.ex., eixos), os pinhões 16 podem girar dentro do alojamento de pinhão 18 e em engrenamento com as engrenagens-satélite 14 para compensar.
[0026] O primeiro membro de suporte 20 pode ser configurado para suportar o pinhão helicoidal 16. Em
Petição 870190046850, de 20/05/2019, pág. 24/47
12/22 particular, o primeiro membro de suporte 20 pode ser configurado para restringir os pinhões helicoidais 16 de movimento axial. Os pinhões helicoidais 16 podem ficar geralmente capturados axialmente entre o primeiro membro de suporte 20 e uma superfície interna da carcaça de diferencial 12 de acordo com uma configuração da invenção como geralmente ilustrada na figura 1. O alojamento de pinhão 18 pode exercer pressão nos pinhões helicoidais 18 para movê-los ao redor e/ou sobre o eixo geométrico de diferencial 22 (isto é, uma linha de centro axial das engrenagens-satélite 14). O primeiro membro de suporte 20 pode ser disposto radialmente para dentro em relação à superfície radial interna 30 do alojamento de pinhão 18. Consequentemente, o primeiro membro de suporte 20 pode ser considerado um suporte interno para os pinhões helicoidais 16. O primeiro membro de suporte 20 pode ter formato geralmente redondo. O primeiro membro de suporte 20 pode ser um elemento cilíndrico sólido de acordo com uma configuração da invenção como geralmente ilustrada na figura 1. O primeiro membro de suporte 20 pode incluir um furo central de acordo com outras configurações da invenção. O primeiro membro de suporte 20 pode incluir uma superfície externa 44 que se estende circunferencialmente ao redor da superfície radial interna 30 do alojamento de pinhão 18, tal que o primeiro membro de suporte 20 faceie a extremidade 34 de cada uma das aberturas 32 do alojamento de pinhão 18. De acordo com uma configuração da invenção como geralmente ilustrada na figura 1, o primeiro membro de suporte 20 do diferencial 10 pode contatar a superfície radial interna 30 do alojamento de pinhão 18. Em particular, a superfície externa 44 do primeiro membro de suporte 20 pode contatar a
Petição 870190046850, de 20/05/2019, pág. 25/47
13/22 superfície radial interna 30 do alojamento de pinhão 18. Em outras palavras, o primeiro membro de suporte 20 pode somente ser configurado para girar sobre seu eixo geométrico e não ser capaz de flutuar em relação ao alojamento de pinhão 18. Na configuração ilustrada geralmente na figura 1, o primeiro membro de suporte 20 do diferencial 10 também pode contatar a primeira extremidade 24 do pinhão helicoidal 16. Em particular, a superfície externa 44 do primeiro membro de suporte 20 pode contatar a primeira extremidade 24 do pinhão helicoidal 16. Devido à grande área superficial do primeiro membro de suporte 20 que está contatando a primeira extremidade 24 do pinhão helicoidal 16, a troca térmica entre os componentes do diferencial pode ser significativamente melhorada.
[0027] De acordo com uma outra configuração da invenção como ilustrada geralmente na figura 2, o diferencial 110 pode ser substancialmente idêntico à configuração ilustrada geralmente na figura 1 exceto pela modificação do primeiro suporte 120 e a inclusão de um segundo membro de suporte 46. De acordo com a configuração da invenção como geralmente ilustrada na figura 2, o primeiro membro de suporte 120 do diferencial 110 pode ser modificado de modo a não contatar a superfície radial interna 30 do alojamento de pinhão 18. Entretanto, o primeiro membro de suporte 120 do diferencial 110 pode ainda contatar a primeira extremidade 24 do pinhão helicoidal 16. Em particular, a superfície externa 144 do primeiro membro de suporte 120 pode contatar a primeira extremidade 24 do pinhão helicoidal 16. Nesta configuração, o primeiro membro de suporte 120 não contata o alojamento de pinhão 18 e pode ser capaz de flutuar em relação ao
Petição 870190046850, de 20/05/2019, pág. 26/47
14/22 alojamento de pinhão 18. Nesta configuração, o compartilhamento de torque igual entre todos os pinhões helicoidais 16 pode ser possível. O primeiro membro de suporte 120 pode compreender um elemento cilíndrico sólido de acordo com uma configuração da invenção. O primeiro membro de suporte 120 pode incluir um furo central 45 de acordo com outras configurações da invenção. O furo central 45 pode ser configurado para melhorar a manutenção do diferencial 110. Qualquer dos diferenciais 10, 110, 210, 310 como descritos aqui pode utilizar um primeiro membro de suporte 20, 120, 220, 320 com um furo central 45 ou compreendendo um elemento cilíndrico sólido.
[0028] De acordo com a configuração da invenção como geralmente ilustrada nas figuras 2-3, o diferencial 110 compreende adicionalmente um segundo membro de suporte 46. O segundo membro de suporte 46 também pode ser configurado para suportar o pinhão helicoidal 16. Em particular, o segundo membro de suporte 46 pode ser configurado para restringir os pinhões helicoidais 16 de movimento axial. Os pinhões helicoidais 16 podem ficar geralmente capturados entre o primeiro membro de suporte 120 e o segundo membro de suporte 46 de acordo com uma configuração da invenção. O segundo membro de suporte 46 pode ser disposto radialmente para fora em relação à superfície radial externa 28 do alojamento de pinhão 18. Consequentemente, o segundo membro de suporte 46 pode ser considerado um suporte externo para os pinhões helicoidais 16. O segundo membro de suporte 46 pode ter formato geralmente redondo. O segundo membro de suporte 46 pode incluir uma superfície externa 48 que se estende circunferencialmente ao redor de uma superfície radial
Petição 870190046850, de 20/05/2019, pág. 27/47
15/22 interna da carcaça de diferencial 12. O segundo membro de suporte 46 também pode incluir uma superfície interna 50 que se estende circunferencialmente ao redor da superfície radial externa 28 do alojamento de pinhão 18, tal que o segundo membro de suporte 46 faceie a extremidade 36 de cada uma das aberturas 32 do alojamento de pinhão 18. De acordo com uma configuração da invenção, o segundo membro de suporte 46 do diferencial 110 pode não contatar a superfície radial externa 28 do alojamento de pinhão 18. Entretanto, o segundo membro de suporte 46 pode contatar o pinhão helicoidal 16. Em particular, o segundo membro de suporte 46 pode contatar a segunda extremidade 26 do pinhão helicoidal 16. Nesta configuração, o segundo membro de suporte 46 não contata o alojamento de pinhão 18 e pode ser capaz de flutuar em relação ao alojamento de pinhão 18. Nesta configuração, compartilhamento de torque igual entre todos os pinhões helicoidais 16 pode ser possível.
[0029] Em conexão com um diferencial 110 que pode incluir quatro ou mais pinhões helicoidais 16, o primeiro membro de suporte 120 e o segundo membro de suporte 46 podem compreender um material flexível. O material flexível pode ser capaz de deformação elástica de acordo com uma configuração. O uso de um material flexível pode permitir o primeiro e segundo membros suporte 120, 46 funcionar como uma mola de folha. Devido a erros de fabricação, os pinhões helicoidais 16 podem não ser carregados em sua direção axial igualmente. Aqueles pinhões helicoidais 16 que estão mais fortemente carregados podem deformar elasticamente um ou ambos de o primeiro e segundo suportes 120, 46. A deformação elástica de um ou de ambos de o primeiro e segundo suportes
Petição 870190046850, de 20/05/2019, pág. 28/47
16/22
120, 46 pode permitir a absorção do impacto negativo de erros de fabricação na performance de torque do diferencial 110. Mesmo se o primeiro e segundo suportes 120, 46 compreenderem um material flexível, a dureza e rigidez do primeiro e segundo membros suporte 120, 46 é grande o suficiente para suportar as cargas funcionais aplicadas no primeiro e segundo suportes 120, 46. Entretanto, a dureza e rigidez do primeiro e segundo suportes 120, 46 são pequenas o suficiente para permitir a deformação elástica para permitir a carga ser compartilhada substancialmente uniformemente entre todos os pinhões helicoidais 16. Aço pode ser usado como um material flexível para o primeiro membro de suporte 120 e o segundo membro de suporte 46 de acordo com uma configuração da invenção. Embora aço seja mencionado em detalhes, qualquer número de outros materiais flexíveis podem ser usados de acordo com outras configurações da invenção. Embora o uso de material flexível para os membros suporte 120, 46 seja descrito em conexão com um diferencial 110 que tem quatro ou mais pinhões helicoidais 16, um ou ambos os membros suporte 120, 46 podem compreender um material flexível de acordo com qualquer número de outras configurações da invenção que tenham menos pinhões helicoidais 16. Além disso, embora o uso de material flexível seja descrito somente para os membros suporte 120, 46 em conexão com o diferencial 110, o uso de material flexível pode ser usado em conexão com os membros suporte (p.ex., primeiro membro de suporte 20) de qualquer outra configuração da invenção descrita aqui.
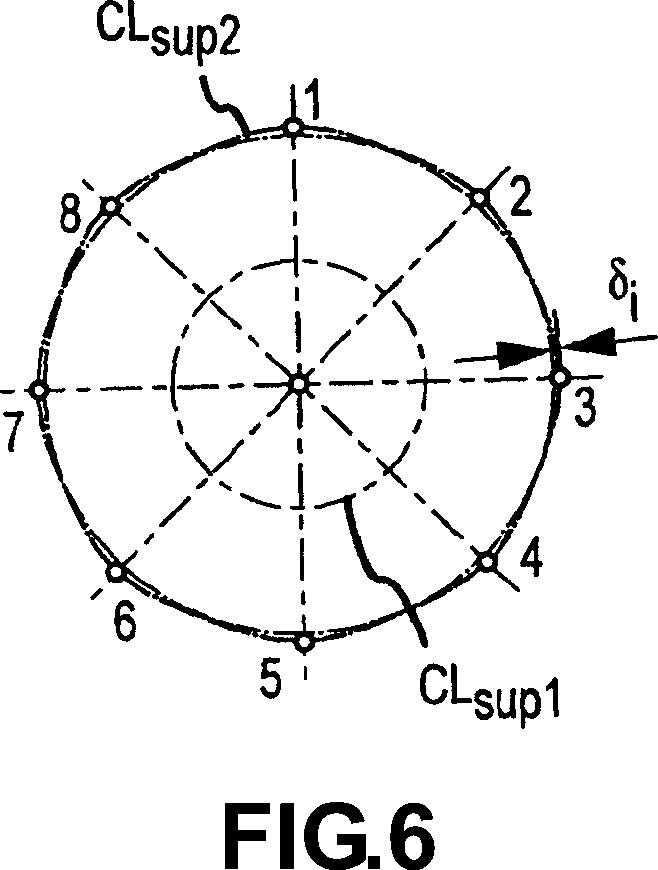
[0030] Referindo-se agora à figura 3, uma vista de seção transversal frontal do diferencial 110 está ilustrada geralmente. O diferencial 110 pode compreender cerca de oito
Petição 870190046850, de 20/05/2019, pág. 29/47
17/22 pinhões helicoidais 16 de acordo com a configuração como ilustrada geralmente. Embora oito pinhões sejam mencionados em detalhe, o diferencial 110 pode incluir mais ou menos pinhões de acordo com outras configurações da invenção. Os pinhões helicoidais 16 podem interagir com o primeiro membro de suporte 12 0 e com o segundo membro de suporte 46. O primeiro membro de suporte 120 pode incluir uma linha de centro CLsup1, e o segundo membro de suporte 46 pode incluir uma linha de centro CLsup2. Sob empuxo axial exercido pelos pinhões helicoidais 16 e pela engrenagem-satélite 14, os pinhões helicoidais 16 podem ser empurrados para fora (isto é, radialmente para fora substancialmente ao longo de um eixo geométrico do pinhão helicoidal contra o segundo membro de suporte 46) ou para dentro (isto é, radialmente para dentro substancialmente ao longo de um eixo geométrico do pinhão helicoidal contra o primeiro membro de suporte 120), dependendo de se um veículo incorporando o diferencial 110 faz uma curva para a direita ou uma curva para a esquerda. Em um caso ideal onde não existem erros/desvios de fabricação (o que não é comercialmente viável), o deslocamento axial de todos os pinhões axiais 16 pode ser aproximadamente igual no comprimento. Isto pode resultar em deformação elástica uniforme do primeiro e segundo membros suporte 120, 46. Entretanto, em um caso onde existam erros/desvios de fabricação, cada um dos pinhões helicoidais 16 pode ser deslocado uma certa distância substancialmente ao longo do eixo geométrico do pinhão helicoidal, e o deslocamento axial de cada pinhão helicoidal 16 pode ser de um valor diferente. Devido ao primeiro e segundo membros suporte 120, 46 serem flexíveis, os empuxos axiais sobre os pinhões helicoidais 16
Petição 870190046850, de 20/05/2019, pág. 30/47
18/22 podem ser aproximadamente iguais entre si. Consequentemente, o diferencial 110 pode ser relativamente insensível a desvios de fabricação, os pinhões helicoidais 16 podem compartilhar uma carga substancialmente igual, e a capacidade de potência do diferencial 110 pode ser significativamente aumentada.
[0031] Referindo-se agora à figura 4, quando um veículo incorporando o diferencial 110 faz uma curva à esquerda, os pinhões helicoidais 16 podem ser carregados para fora como representado esquematicamente. Para o diferencial ideal tendo zero erros/desvios de fabricação (o que não é comercialmente viável), todos os pinhões helicoidais 16 podem ser deslocados sob a carga em um deslocamento igual δ como geralmente ilustrado na figura 5. Entretanto, em um caso onde existam erros/desvios de fabricação (o que é inevitável), cada pinhão helicoidal 16 pode ser deslocado em seu próprio deslocamento axial δi como geralmente ilustrado na figura 6, onde i = 1... N e N é o número total dos pinhões helicoidais 16.
[0032] Referindo-se agora à figura 7, quando um veículo incorporando o diferencial 110 faz uma curva à direita, os pinhões helicoidais 16 podem ser carregados para dentro como representado esquematicamente. Para o diferencial ideal tendo zero erros/desvios de fabricação (o que não é comercialmente viável), todos os pinhões helicoidais 16 podem ser deslocados sob a carga em um deslocamento igual Δ como geralmente ilustrado na figura 8. Entretanto, em um caso onde existam erros/desvios de fabricação (o que é inevitável), cada pinhão helicoidal 16 pode ser deslocado em seu próprio deslocamento axial Δί como ilustrado geralmente na figura 9, onde i = 1... N e N é o n/úmero total de pinhões helicoidais 16.
[0033] De acordo com uma outra configuração da invenção
Petição 870190046850, de 20/05/2019, pág. 31/47
19/22 como ilustrada geralmente na figura 10, o diferencial 210 pode ser substancialmente idêntico à configuração ilustrada
|
geralmente |
na |
figura |
2 exceto |
por modificação do |
pinhão |
|
helicoidal |
16 |
e do |
primeiro |
membro de |
suporte |
220. |
Em |
|
particular, |
o |
pinhão |
helicoidal |
modificado |
216 pode |
ter |
uma |
primeira extremidade 224 que tem um formato substancialmente esférico. O raio de curvatura Rsph do formato substancialmente esférico pode ser definido por uma esfera tendo um centro Osph no eixo geométrico de diferencial 22. A primeira extremidade 224 do pinhão helicoidal 216 pode ser substancialmente côncava de acordo com uma configuração da invenção. O primeiro membro de suporte modificado 220 pode incluir uma superfície externa 244 que se estende circunferencialmente ao redor da superfície radial interna 30 do alojamento de pinhão 18, tal que o primeiro membro de suporte 220 faceie a extremidade 34 das aberturas 32 do alojamento de pinhão 18. A superfície externa 244 do primeiro membro de suporte 220 também pode ter um formato substancialmente esférico. O raio de curvatura do formato substancialmente esférico também pode ser definido por uma esfera tendo um centro Osph no eixo geométrico diferencial 22. A superfície externa 244 do primeiro membro de suporte 220 pode ser substancialmente convexa de acordo com uma configuração da invenção. Como em algumas outras configurações, o primeiro membro de suporte 220 do diferencial 210 pode não contatar a superfície radial interna 30 do alojamento de pinhão 18. Ao invés, a superfície externa 244 do primeiro membro de suporte 220 pode contatar a primeira extremidade 224 do pinhão helicoidal 216. De acordo com a configuração ilustrada geralmente na figura 3, o pinhão helicoidal 216 e o primeiro membro de suporte 220 fazem
Petição 870190046850, de 20/05/2019, pág. 32/47
20/22 contato superficial, ao invés de contato pontual. O contato superficial pode permitir uma redução significativa de pressão de contato nas superfícies de interação do pinhão helicoidal 216 e do primeiro membro de suporte 220. A configuração ilustrada geralmente na figura 10 pode ser usada em casos quando erros de fabricação do diferencial 210 forem desprezívelmente pequenos, e o desalinhamento das superfícies esféricas do primeiro membro de suporte 220 e da primeira extremidade 224 do pinhão helicoidal 215 não afete negativamente a capacidade de apoio do contato esférico das superfícies interagindo do pinhão helicoidal 216 e do primeiro membro de suporte 220.
[0034] De acordo com uma outra configuração da invenção como ilustrada geralmente na figura 11, o diferencial 310 pode ser substancialmente idêntico à configuração ilustrada geralmente na figura 10 exceto pela modificação do primeiro membro de suporte 320. O primeiro membro de suporte modificado 320 pode incluir uma superfície externa 344 que se estende circunferencialmente ao redor da superfície radial interna 30 do alojamento de pinhão 18, tal que o primeiro membro de suporte 320 faceie a extremidade 34 de cada uma das aberturas 32 do alojamento de pinhão 18. A superfície de contato 344 do primeiro membro de suporte 320 pode ter um formato substancialmente esférico. Entretanto, o raio de curvatura Rsup do formato substancialmente esférico do primeiro membro de suporte 320 pode ser menor que o raio de curvatura Rsph de uma esfera tendo um centro Osph no eixo geométrico de diferencial 22. A superfície externa 344 do primeiro membro de suporte 320 pode ser substancialmente convexa de acordo com uma configuração da invenção. Tendo o
Petição 870190046850, de 20/05/2019, pág. 33/47
21/22 raio de curvatura Rsup do primeiro membro de suporte 32 0 menor se comparado com o raio de curvatura Rsph da esfera tendo um centro Osph no eixo geométrico diferencial 22, pode existir lubrificação melhorada das superfícies de contato da extremidade 224 do pinhão helicoidal 216 e da superfície externa 344 do primeiro membro de suporte 320. A condição melhorada de lubrificação pode ser devida ao chamado efeito elasto-hidrodinâmico (efeito EHD). De acordo com o efeito elasto-hidrodinâmico, as superfícies opostas da extremidade 224 do pinhão helicoidal 216 e da superfície externa 344 do primeiro membro de suporte 320 podem ser separadas, mas pode haver alguma interação entre asperezas nas superfícies opostas, e pode haver uma deformação elástica na superfície de contato ampliando a área de apoio de carga, através do que a resistência viscosa do lubrificante se torna capaz de suportar a carga. Alguém de experiência ordinária na técnica pode determinar uma redução desejável no raio de curvatura Rsup do formato substancialmente esférico do primeiro membro de suporte 32 0 se comparado com o raio de curvatura Rsph de uma esfera tendo um centro Osph no eixo geométrico de diferencial 22 localizando e usando métodos desenvolvidos de acordo com a teoria de lubrificação elasto-hidrodinâmnica.
[0035] As descrições anteriores de configurações específicas da presente invenção foram apresentadas com propósitos de ilustração e descrição. Elas não são intencionadas a serem exaustivas ou a limitar e invenção às formas precisas divulgadas, e várias modificações e variações são possíveis à luz do ensinamento acima. As configurações foram escolhidas e descritas para explicar os princípios da invenção e sua aplicação prática, para desta forma permitir
Petição 870190046850, de 20/05/2019, pág. 34/47
22/22 outros experientes na técnica utilizar a invenção e várias configurações com várias modificações que sejam adequadas ao particular uso contemplado. A invenção foi descrita em grandes detalhes na especificação anterior, e é acreditado que várias alterações e modificações da invenção tornar-se-ão aparentes àqueles experientes na técnica a partir de uma leitura e compreensão da especificação. É intencionado que todas tais alterações e modificações estejam incluídas na invenção, até o ponto em que elas venham dentro do escopo das reivindicações anexas. É intencionado que o escopo da invenção seja definido pelas reivindicações anexas a este e suas equivalentes.
Petição 870190046850, de 20/05/2019, pág. 35/47
1/4
 Petição 870190046850, de 20/05/2019, pág. 40/472/7
Petição 870190046850, de 20/05/2019, pág. 40/472/7
 FIG2Petição 870190046850, de 20/05/2019, pág. 41/473/7
FIG2Petição 870190046850, de 20/05/2019, pág. 41/473/7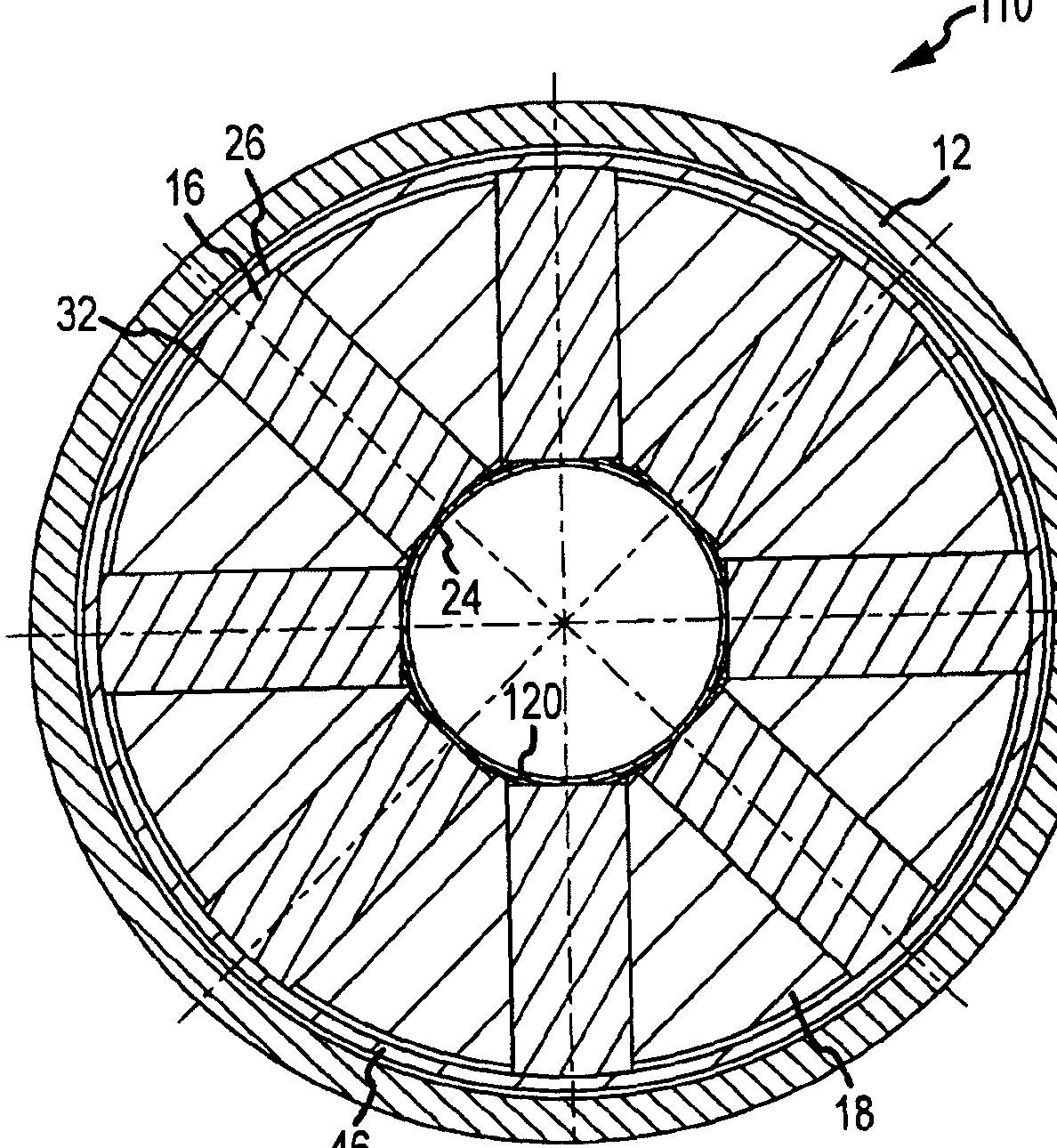 FIG3Petição 870190046850, de 20/05/2019, pág. 42/474/7
FIG3Petição 870190046850, de 20/05/2019, pág. 42/474/7 FIG4
FIG4
 Petição 870190046850, de 20/05/2019, pág. 43/47
Petição 870190046850, de 20/05/2019, pág. 43/47 FIG7Cl-sup2CLsup2
FIG7Cl-sup2CLsup2
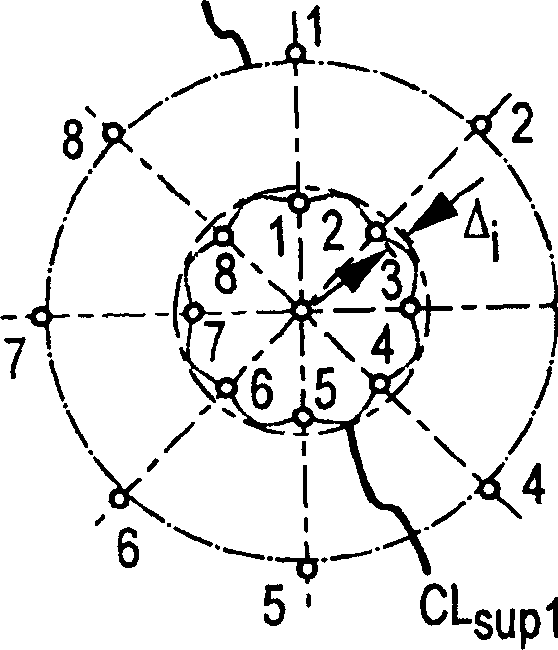 FIG8FIG9Petição 870190046850, de 20/05/2019, pág. 44/47
FIG8FIG9Petição 870190046850, de 20/05/2019, pág. 44/47