CAMPO TÉCNICO
A presente invenção se refere a um aparelho de estabilização de imagem que previne deterioração de uma imagem fotografada corrigindo uma imagem borrada devido a tremor, e um aparelho de captura de imagem incluindo um aparelho de estabilização de imagem.
FUNDAMENTOS DA TÉCNICA
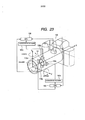
A FIG. 23 é uma vista mostrando um esboço de um aparelho de estabilização de imagem incluído na câmera convencional câmera. Um tremor que ocorra para a câmera tem seis graus de liberdade no total, que são movimentos rotacionais de três graus de liberdade constituídos de movimento de arfagem, guinada e rolagem, e movimentos de translação de três graus de liberdade constituídos de movimentos em uma direção do Eixo y e do Eixo Z. Um aparelho de estabilização de imagens que são comercializados no presente usualmente corrigem a imagem borrada devido aos movimentos rotacionais de dois graus de liberdade constituídas de movimento de arfagem e guinada.
O movimento de câmera é monitorado por um sensor de velocidade angular 130. Como o sensor de velocidade angular, um sensor de velocidade angular de vibração piezo-elétrico que detecta uma força de Coriolis que é causada por rotação é em geral usado. O sensor de velocidade angular 130 contém três detectores que efetuam detecção de movimento de arfagem isto é a rotação em tomo do eixo Z na Fig. 23, detecção de movimento de guinada que é a rotação em tomo do eixo y na Fig. 23, e detecção de movimento de rolagem que é a rotação em tomo do eixo x (eixo óptico) na Fig. 23.
Quando uma imagem borrada devido a tremor é para ser corrigida, a saída do sensor de velocidade angular 130 é enviada para uma
CPU da lente 106, e uma posição de operação alvo de uma lente de correção 101 para estabilização de imagem é calculada. De modo a operar a lente de correção 101 para a posição de operação alvo, sinais de instrução são enviados para acionadores de voltagem 161x e 161 y, e os acionadores de voltagem 161x e 16 ly seguem os sinais de instrução, e operam os mecanismos de operação de lentes 120x e 120y. A posição da lente de correção 101 é monitorada por detectores de posição da lente 110x e 110y, e é realimentada para a CPU ^adente 106. A CPU da lente 106 efetua controle posicionai da lente de correção 101 com base na posição de operação alvo e na posição da lente de correção 101. Operando a lente de correção de acordo com o tremor desta forma, imagem borrada causada pelo tremor pode ser corrigida.
Contudo, no supracitado aparelho de estabilização de imagem, detecção de movimento de câmera devido ao tremor é efetuada apenas pelo sensor de velocidade angular 130, e, por conseguinte, o movimento angular (movimento rotacional) pode ser monitorado, mas movimento que causa o eixo óptico se mover em paralelo verticalmente ou lateralmente (daqui em diante, referido como movimento paralelo) não pode ser monitorado. Consequentemente, estabilização de imagem pode ser efetuada somente para os movimentos dos dois graus de liberdade constituídos de movimentos de arfagem e de guinadas.
Aqui, sobre a imagem borrada causada por um movimento paralelo, o caso de efetuar disparo fotográfico usando uma micro lente com um comprimento focal de 100 mm será descrito como um exemplo. Quando uma paisagem em um distância infinita e fotografada usando esta lente, se a saída do sensor de velocidade angular é substancialmente 0,8 graus/s, a velocidade de movimento no plano da imagem é cerca de 1,40 mm/s (=100 x sen 0,8) a partir do comprimento focal. Por conseguinte, a largura do movimento do plano de imagem devido ao movimento angular quando fotografando com um tempo de exposição de 1/15 s se toma 93 pm (= 1,40 mm/15). Adicionalmente, se a inteira câmera é movida paralelamente na direção vertical em 1,0 mm/s em adição ao movimento angular, disparo fotográfico não é influenciado pelo componente de velocidade do movimento paralelo, e uma imagem borrada devido ao movimento paralelo não ocorre, já que no caso de disparo fotográfico para infinito, a ampliação de disparo fotográfico P é substancialmente zero.
Contudo, quando disparo fotográfico de perto é efetuado para fotografar uma flor ou o similar, a ampliação do disparo fotográfico é muito grande, e a influência de movimento paralelo não pode ser ignorada. Por exemplo, quando a ampliação do disparo fotográfico é ampliação igual (0=1), e a velocidade de movimento na direção vertical é 1 mm/s, a imagem em um plano de imagem se move também na velocidade de 1 mm/s. A largura de movimento na imagem plana no momento de efetuar disparo fotográfico com um tempo de exposição de 1/15 segundo se toma 67 pm, e uma imagem borrada devido ao movimento paralelo não pode ser ignorado.
A seguir, um método geral (modelo e expressão matemática) que expressa o movimento de um objeto em um espaço em um campo de física e engenharia será descrito. Aqui, sobre o modelo expressando movimento do objeto em um plano, um objeto Simples será descrito para facilitar a descrição. Neste caso, se os três graus de liberdade do objeto São definidos, o movimento e a posição do objeto podem ser de modo único, definidos. O primeiro um é o modelo expressando um movimento paralelo e um movimento rotacional (ver FIGS. 24A e 24B). Em um sistema de coordenada fixa O-XY em um plano com o eixo de abscissa configurado como um Eixo x e o eixo ortogonal configurado com um Eixo y, a posição do objeto pode ser determinado se definindo os três graus de liberdade: uma posição X(t) na direção do eixo x; uma posição Y(t) na direção do eixo y; e o ângulo rotacional θ(t) do próprio objeto São especificados conforme mostrado na Fig. 24A. O movimento do objeto (vetor de velocidade) pode ser expresso pelos três componentes de uma velocidade de translação na direção do eixo x Vx (t) e uma velocidade de translação na direção do eixo y Vy (t) de um ponto de referência (ponto principal 02) configurado no objeto, e uma velocidade angular de rotação θ(t) em tomo do ponto de referência no objeto conforme mostrado na Fig. 24B. Este modelo é o mais comum.
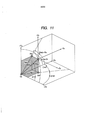
O segundo um é o modelo expressando um centro instantâneo de rotação e um raio de rotação (ver FIG. 25). No sistema de coordenada fixa O-XY em um plano XY, o objeto é assumido estar girando em uma velocidade de rotação θ(t) com um raio de rotação R(t) em tomo de um determinado ponto f(t) = (X(t), Y(t)) sendo configurado como um centro instantâneo de rotação, em um determinado instante. Como isto, o movimento dentro do plano pode ser expresso por uma localização f (t) do centro instantâneo de rotação e a velocidade de rotação θ(t) no instante. Este modelo é frequentemente usado em uma análise de um mecanismo de ligação em mecânica.
Nos últimos anos, câmeras equipadas com uma função de corrigir um movimento paralelo são propostos no Pedido de Patente Japonesa Estabelecida em Aberto de N° H07-225405 e Pedido de Patente Japonesa Estabelecida em Aberto de N° 2004-295027. Pode ser dito que no Pedido de Patente Japonesa Estabelecida em Aberto de N° H07-225405, o movimento da câmera em um espaço tridimensional é expresso por um movimento de translação e um movimento de rotação com base nos valores de medição valores de três acelerômetros e três sensores de velocidade angulares.
Adicionalmente, no Pedido de Patente Japonesa Estabelecida em Aberto de N° 2004-295027, no movimento de câmera incluindo movimento angular e movimento paralelo, como ilustrado na FIG. 2 do Documento de Patente, a distância n do centro rotacional a partir do plano focal é calculada. Na expressão matemática 1 do Pedido de Patente Japonesa Estabelecida em Aberto de N° 2004-295027, a quantidade de movimento angular que ocorre quando o plano focal é configurado conforme o centro de rotação é calculado na primeira meia parte, e a quantidade de movimento paralelo que ocorre devido ao movimento de translação é calculada na última meia parte. A quantidade de movimento paralelo da última meia parte é um termo de correção que é considerado sendo substituído com rotação na posição alienada a partir do plano focal de uma distância n. O método para obter a posição n do centro de rotação na Fig. 3 no Pedido de Patente Japonesa Estabelecida em Aberto de N° 2004-295027 usa o conceito de um centro instantâneo que é frequentemente usado na mecânica, com o modelo expressando o movimento no espaço. Isto é a idéia que o movimento no espaço pode ser expresso por uma sucessão do movimento rotacional, isto é, o movimento no espaço é um movimento rotacional com um determinado raio com um determinado ponto como o centro no instante, e é o movimento rotacional do raio com o próximo determinado ponto como o centro no próximo instante. Por conseguinte, pode ser dito que no Pedido de Patente Japonesa Estabelecida em Aberto de N° 2004-295027, o movimento de câmera devido ao tremor é modelado como uma sucessão do movimento rotacional tendo o centro instantâneo.
Contudo, o método descrito no Pedido de Patente Japonesa Estabelecida em Aberto de N° H07-225405 tem o problema que a quantidade de cálculo para obter a quantidade de borrão no plano de imagem se toma enorme, e o algoritmo de cálculo se toma muito complicado. Adicionalmente, o cálculo de correção com relação o borrão na direção do eixo óptico (for de foco) não é mencionado. Adicionalmente, pode ser dito que no Pedido de Patente Japonesa Estabelecida em Aberto de N° 2004-295027, movimento de câmera é modelado como uma sucessão do movimento rotacional tendo o centro instantâneo de rotação conforme descrito acima, e o problema do modelo e da expressão matemática é que conforme descrito no próprio parágrafo [0047] do Pedido de Patente Japonesa Estabelecida em Aberto de N° 2004-295027, no caso de F1«F2 (as forças aplicadas aos dois acelerômetros), a posição do centro de rotação n se toma oo, e cálculo não pode ser efetuado. Adicionalmente, o fato que a posição do centro de rotação n é oo significa que o movimento devido ao ângulo na direção de arfagem ou na direção de guinada está ausente, e este movimento não pode ser detectado pelo sensor de velocidade angular. A quantidade de correção pode ser calculada usando a saída dos dois sensores de aceleração, mas a precisão é baixa e a quantidade de cálculo se toma enorme. Adicionalmente, pela expressão matemática neste caso, o cálculo de correção do movimento na direção do eixo óptico não pode ser feito.
Adicionalmente, com mudança na posição do ponto principal do sistema óptico de disparo fotográfico, o componente de erro de correção que será descrito mais tarde emitida do sensor de aceleração (acelerômetro), mas Pedido de Patente Japonesa Estabelecida em Aberto de N° H07-225405 e Pedido de Patente Japonesa Estabelecida em Aberto de N° 2004-295027 não têm qualquer correspondente descrição técnica.
DESCRIÇÃO DA INVENÇÃO
A presente invenção é feita em vista dos problemas supracitados, e tem um objetivo de fornecer um aparelho de estabilização de imagem e um aparelho de captura de imagem que possibilitam estabilização de imagem apurada sem uma falha de controle, e pode minimizar uma quantidade de erro acompanhando uma mudança na posição do ponto principal de um sistema óptico de disparo fotográfico, em qualquer que seja o estado um movimento angular e um movimento paralelo coexistem.
De modo a obter o objetivOo supracitado, um aparelho de estabilização de imagem de acordo com uma modalidade da presente invenção adota uma constituição caracterizada por ter um sistema óptico de disparo fotográfico que fotografa um objeto, no qual um ponto principal do sistema óptico de disparo fotográfico se move para uma segunda posição do ponto principal a partir de uma primeira posição do ponto principal em uma direção do eixo óptico do sistema óptico de disparo fotográfico, e um detector de aceleração que detecta uma aceleração que é aplicada ao aparelho de estabilização de imagem e emite a aceleração e é disposto entre a primeira posição do ponto e a segunda posição do ponto principal na direção do eixo óptico do sistema óptico de disparo fotográfico.
Os outros objetos e recursos da presente invenção se tomarão aparente a partir da seguinte descrição e desenhos.
BREVE DESCRIÇÃO DOS DESENHOS
A FIG. 1 é um diagrama em bloco ilustrando uma parte principal de um aparelho de captura de imagem que é a modalidade 1 de acordo com a presente invenção.
A FIG. 2 é um diagrama simplificado de um estado da câmera projetado para um plano XY da modalidade 1.
A FIG. 3 é um diagrama ilustrando uma posição do ponto principal e posição do pónto principal e uma posição de um acelerômetro na modalidade 1.
As FIGS. 4A e 4B são diagramas ilustrando funções de proporção de erro de saídas do acelerômetro no estado da Fig. 3.
A FIG. 5 é um diagrama ilustrando uma função de proporção de erro de uma saída de acelerômetro em uma posição infinita.
A FIG. 6 é um diagrama ilustrando uma posição no qual uma proporção de erro da saída do acelerômetro no estado da Fig. 3 se toma a mínima.
A FIG. 7 que é composto das Figs. 7A e 7B são fluxogramas ilustrando uma operação de modalidade 1.
A FIG. 8A é um diagrama ilustrando um sistema de coordenada fixo em uma câmera.
A FIG. 8B é um diagrama ilustrando uma vista de topo da câmera.
A FIG. 8C é um diagrama ilustrando uma vista frontal da câmera.
A FIG. 8D é um diagrama ilustrando uma vista lateral da câmera.
A FIG. 9 é uma vista expressando somente um sistema óptico da câmera em um espaço tri-dimensional.
As FIGS. 10A e 10B são vistas ilustrando um sistema de coordenada polar e um sistema de coordenada ortogonal de um ponto principal A.
A FIG. 11 é um mapa de coordenada no momento de ser projetado para um plano X9Y9 e um plano Z9X9 plane.
A FIG. 12 é um diagrama ilustrando um estado de câmera projetado para o plano X9Y9.
A FIG. 13 é um diagrama ilustrando um estado de câmera projetado para o plano Z9X9.
A FIG. 14 é uma vista de um estado inicial da câmera em um tempo inicial t=0.
A FIG. 15 é uma vista de um estado inicial da câmera em um sistema de coordenadas 0-XYZ.
A FIG. 16 é um diagrama básico e explicativo de um sistema de coordenada polar.
A FIG. 17 é um diagrama ilustrando um estado de câmera que é projetado para um sistema de coordenada XY bidimensional.
A FIG. 18 é um diagrama ilustrando um estado de câmera projetado para um sistema de coordenada ZX bidimensional.
As FIGS. 19A e 19B são diagramas ilustrando funções de proporção de erro e o similar das saídas de acelerômetro de acordo com a modalidade 2.
A FIG. 20 é um diagrama ilustrando uma posição onde a proporção de erro de acordo com a modalidade 2 se toma a mínima.
A FIG. 21 é um diagrama ilustrando uma posição onde uma proporção de erro de acordo com um exemplo modificado da modalidade 2 se toma o mínimo.
A FIG. 22 é composto das Figs. 22A e 22B que são fluxogramas ilustrando uma operação da modalidade 3.
A FIG. 23 é uma vista ilustrando um aparelho de estabilização de imagem de uma câmera de um exemplo convencional.
As FIGS. 24A e 24B são diagramas ilustrando definições de uma posição do objeto e uma velocidade do objeto em um simples sistema de coordenada bidimensional.
A FIG. 25 é um diagrama ilustrando uma definição de uma localização simples de centro instantâneo de rotação.
DESCRIÇÃO DAS MODALIDADES
Modos para realizar a presente invenção são conforme mostrado nas seguintes modalidades 1 à 3.
[Modalidade 1]
Na seguinte modalidade, o movimento de tremor da câmera mantido por mãos humanas, e um movimento de imagem que ocorre em um plano de imagem como um resultado do movimento de tremor da câmera serão expressos por " expressão de movimento de revolução e rotação" com o modelo de movimento expresso por um movimento de rotação e um movimento de revolução e uma expressão óptica geométrica sendo combinada.
A presente modalidade é um aparelho de estabilização de imagem que calcula um movimento de câmera movimento a partir de valores medidos de um acelerômetro e um sensor de velocidade angular, e a expressão de movimento de revolução e rotação, e ainda calcula um movimento de imagem. Efetuando controle de operação de uma parte ou de toda a lente de disparo fotográfico ou uma parte ou todo do dispositivo de captura de imagem com base em um valor de movimento de imagem calculado, uma imagem borrada e corrigida. Altemativamente, a presente invenção fornece um aparelho de estabilização de imagem que corrige uma imagem borrada efetuando processamento de imagem de uma imagem fotografada com base no valor do movimento de imagem calculado obtido a partir da expressão de movimento de revolução e rotação.
A FIG. 1 é um diagrama em bloco ilustrando uma parte principal de um aparelho de captura de imagem (sistema de câmera) incluindo um aparelho de estabilização de imagem de acordo com a modalidade 1 da presente invenção. As partes que efetuam as mesmas funções que na arte anterior são atribuídos com os mesmos numerais de referência e caracteres, e as descrições redundantes serão apropriadamente omitidas.
Um aparelho de estabilização de imagem de acordo com a modalidade 1 é fornecido em um cilindro de lente 102 preso e destacável de um corpo da câmera 201, e efetua correção de borrão com relação as direções de cinco graus de liberdade de arfagem (rotação em tomo do eixo Z2), guinada (rotação em tomo do eixo Y2), uma direção no eixo Y2, uma direção no eixo Z2 e uma direção no eixo X2 (eixo óptico). Contudo, na Fig. 1 e na seguinte descrição, um sistema de estabilização de imagem na rotação de arfagem e na direção do eixo Y2, e um sistema de estabilização de imagem na direção do eixo óptico no eixo X2 (eixo óptico) são mostrados, e um sistema de estabilização de imagem na rotação de guinada e a na direção do eixo Z2 é a mesma que o sistema de estabilização de imagem da rotação de arfagem e a direção do eixo Y2.
Um sensor de velocidade angular 130 é um detector de velocidade angular que é de modo flutuante suportado com relação ao cilindro de lente 102, e detecta a velocidade angular do movimento que ocorre para o corpo da câmera 201 (cilindro de lente 102). O sensor de velocidade angular 130 de acordo com a modalidade 1 é um sensor de velocidade angular de vibração piezo-elétrico que detecta força de Coriolis gerada por rotação. O sensor de velocidade angular 130 é um sensor de velocidade angular internamente tendo eixo de sensitividade para três eixos de rotação de arfagem, de guinada e de rolagem. A razão porque o sensor de velocidade angular 130 é de forma flutuante suportado é eliminar a influência da vibração mecânica acompanhando a operação do mecanismo da câmera tanto quanto possível. O sensor de velocidade angular 130 emite um sinal de velocidade angular correspondendo à uma velocidade anular detectada para um filtro 160c.
Um acelerômetro 121 é um detector de aceleração que detecta a aceleração do movimento que ocorre para o corpo de câmera 201 (cilindro de lente (102). O acelerômetro 121 de acordo com a modalidade 1 é um acelerômetro tri-axial tendo três eixos de sensibilidade com relação às três direções do eixo X, do eixo Y e do eixo Z, é de forma flutuante suportado pelo cilindro de lente unidade de aquisição de informação de entrada 102. O acelerômetro 121 é um de forma flutuante suportado pela mesma razão que o caso do sensor de velocidade angular 130. Adicionalmente, o acelerômetro 121 é um sensor de aceleração tri-axial (sensor de aceleração usando um peso) na presente modalidade, e as características de frequência dos dois eixos são igualmente altas, mas a característica do remanescente um eixo é baixa. Por conseguinte, de modo a detectar as acelerações na direção do eixo Y2 e na direção ortogonal do eixo Z2 para o eixo óptico, os dois eixos com alta sensitividade são usados, e o um eixo baixo em características é alinhado com o eixo X2 (direção do eixo óptico). Isto é, para precisamente detectar as acelerações na direção do eixo Y2 e na direção do eixo Z2 que ter uma grande influência na correção da imagem borrada.
A saída do acelerômetro 121 é convertida de A/D após passar através de um filtro passa baixo (LPF) tal como a filtro 160a ou o similar, e é entrada para um calculador de corrente de lente de IS (estabilização de imagem) 107 em uma CPU da lente 106. O acelerômetro 121 pode ser montado em um quadro de espelho móvel que se move na direção do eixo óptico durante operação de aproximação/afastamento ou o similar, um quadro que mantém o outro sistema óptico, ou uma unidade em um sistema óptico tal como um batente, mas em tal um caso, é necessário possibilitar a posição do acelerômetro 121 com relação à posição do ponto principal após operação de aproximação/afastamento ser detectada.
Adicionalmente, o sensor de velocidade angular 130 é de um tipo giroscópio vibratório conforme descrito acima, e vibra em 26 KHz. Consequentemente, se esses sensores são montados no mesmo substrato, o acelerômetro 121 é provável de capturar o ruído de vibração, e por conseguinte, o acelerômetro 121 e sensor de velocidade angular 130 são montados em substratos separados.
Um mecanismo de operação de lente de estabilização de imagem 120 é um mecanismo de operação (atuador) que gera uma força de operação para operar uma lente de correção 101 para correção da imagem borrada dentro do plano (dentro do plano Y2Z2) perpendicular a um eixo óptico I. O mecanismo de operação de lente de estabilização de imagem 120 gera uma força de operação na direção do Y2, e opera a lente de correção 101 quando uma bobina não ilustrada é trazida em um estado pleno de energia pela corrente de operação emitida por um acionador de voltagem 161.
Um detector de posição de lente 110 é um detector de posição óptica que detecta a posição da lente de correção 101 no plano ortogonal ao eixo óptico I. O detector de posição de lente 110 monitora a presente posição da lente de correção 101, e alimenta de volta a informação envolvendo a presente posição da lente de correção 101 para um controlador de estabilização de imagem 108 via um conversor de A/D.
A CPU da lente 106 é um processador central que efetua vários controles do lado do cilindro de lente 102. A CPU da lente 106 calcula o comprimento focal com base no sinal de pulso emitido por um detector de comprimento focal 163, e calcula uma distância do objeto com base no sinal de pulso emitido por um detector de distância do objeto 164. Adicionalmente, em uma CPU da lente 106, um calculador de correção de lente de estabilização de imagem 107, um controlador de estabilização de imagem 108 e um controlador de lente de auto-foco 401 são fornecidos. A CPU da lente 106 pode efetuar comunicação com um CPU do corpo 109 via uma junção de lente 190 fornecida entre o cilindro de lente 102 e o corpo da câmera 201. Um comando de início de correção de imagem borrada é enviado a partir da CPU do corpo 109 sincronamente com meia depressão ON de um comutador de liberação 191 e um comando de parada de correção de imagem borrada é enviado para a CPU 106 sincronamente com meia depressão OFF.
Adicionalmente, a CPU da lente 106 monitora o estado de um comutador de correção de borrão (SW) 103 fornecido no cilindro de lente 102. Se o comutador de correção de borrão 103 está ON, a CPU da lente 106 efetua controle de correção de imagem borrada, e se o comutador de correção de borrão 103 está OFF, a CPU da lente 106 ignora um comando de início de correção de imagem borrada da CPU do corpo 109 e não efetua correção de borrão.
Um calculador de correção de lente de estabilização de imagem 107 é uma parte que converte os sinais de saídas dos filtros 160a e 160c na informação de velocidade alvo para operar o cilindro de lente 102 para a posição alvo. O controlador de estabilização de imagem 108, os filtros 160a e 160c, uma EEPROM 162, o detector de comprimento focal 163, e o detector de distância do objeto 164 são conectados a um calculador de correção de lente de estabilização de imagem 107. O controlador de lente de auto-foco 401 tem um calculador de velocidade de movimento de direção do eixo óptico 402 que efetua cálculo para efetuar correção do movimento de direção do eixo óptico usando o valor de saída do acelerômetro a partir de um calculador de correção de lente de estabilização de imagem 107, e emite o resultado de cálculo para um acionador de voltagem da lente de auto-foco 172.
Uma lente de auto-foco 140 pode ser operado na direção do eixo óptico através de um mecanismo de operação de lente de auto-foco 141 usando um motor ultrassónico ou de passo com uma fonte de operação. O acionador de voltagem da lente de auto-foco 172 gera uma voltagem para efetuar controle de operação do mecanismo de operação de lente de auto-foco 141.
Um calculador de correção de lente de estabilização de imagem 107 captura os sinais de saídas (sinais analógicos) emitidos a partir do sensor de velocidade angular 130 e o acelerômetro 121 através dos filtros 160a e 160c fazendo quantização dos sinais através de conversão de A/D. Com base na informação de comprimento focal obtida a partir do detector de comprimento focal 163, na informação de distância do objeto obtida do detector de distância do objeto 164 e na informação peculiar para a lente que é escrita na EEPROM 162, um calculador de correção de lente de estabilização de imagem 107 converte os sinais na velocidade de operação alvo da lente de correção 101. O método de conversão (método de cálculo) para a posição de operação alvo efetuado por um calculador de correção de lente de estabilização de imagem 107 será descrito em detalhes mais tarde. O sinal de velocidade alvo que é a informação da velocidade de operação alvo calculada pelo calculador de correção de lente de estabilização de imagem 107 é emitido para o controlador de estabilização de imagem 108.
O controlador de estabilização de imagem 108 é a parte que controla o mecanismo de operação de lente de estabilização de imagem 120 via o acionador de voltagem 161, e efetua controle de acompanhamento tal que a lente de correção 101 é operada como a informação da velocidade de operação alvo. O controlador de estabilização de imagem 108 converte o sinal de detecção de posição (sinal analógico) emitido pelo detector de posição de lente 110 em um sinal digital e captura o sinal digital. A parte de entrada para um controlador de estabilização de imagem 108 é para o sinal de velocidade alvo convertido na velocidade de operação alvo da lente de correção 101 que é a saída do calculador de correção de lente de estabilização de imagem 107, e uma outra parte de entrada é para a informação posicionai da lente de correção 101 que é obtida pelo detector de posição de lente 110.
Como o controle no controlador de estabilização de imagem 108, controle de velocidade é efetuado usando o desvio entre a velocidade de operação alvo da lente de correção 101 e a informação de velocidade efetiva. O controlador de estabilização de imagem 108 calcula um sinal de operação com base na velocidade de operação alvo, informação de velocidade da lente de correção 101 e o similar, e emite o sinal de operação digital para o acionador de voltagem 161.
Altemativamente, como o controle no controlador de estabilização de imagem 108, conhecido controle de PID pode ser usado. Controle de PID é efetuado usando o desvio da informação posicionai alvo e da informação posicionai de lente da lente de correção 101. O controlador de estabilização de imagem 108 calcula o sinal de operação com base na informação posicionai alvo, na informação posicionai de lente de correção 101 e o similar, e emite o sinal de operação digital para o acionador de voltagem 161.
Os filtros 160a e 160c são filtros que removem predeterminados componentes de frequência dos sinais de saídas do sensor de velocidade angular 130 e do acelerômetro 121, e corta os componentes de ruído e os componentes DC incluídos na banda de alta frequência. Os filtros 160a e 160c efetuam conversão de A/D dos sinais de velocidade angular após os predeterminados componentes de frequência serem removidos, e daí em diante, emite os sinais de velocidade angular para um calculador de correção de lente de estabilização de imagem 107.
O acionador de voltagem 161 é um mecanismo que supre energia para um mecanismo de operação de estabilização de imagem 120 de acordo com o sinal de operação de entrada (voltagem de operação). O acionador de voltagem 161 efetua comutação para o sinal de operação, aplica uma voltagem para o mecanismo de operação de lente de estabilização de imagem 120 para operar o mecanismo de operação de lente de estabilização de imagem 120.
A EEPROM 162 é uma memória não-volátil que armazena lente dados que são vários tipos de informação única envolvendo o cilindro de lente 102, os coeficientes para converter os sinais de pulso emitido pelo detector de distância do objeto 164 em quantidades físicas.
O detector de comprimento focal 163 é um codificador de aproximação/afastamento que detecta um comprimento focal. O detector de comprimento focal 163 emite o pulso de sinal correspondendo a um valor de comprimento focal para um calculador de correção de lente de estabilização de imagem 107. O detector de distância do objeto 164 é um codificador de foco para detectar a distância para um objeto. O detector de distância do objeto 164 detecta a posição de um sistema óptico de disparo fotográfico 105 (lente de auto-foco 140), e emite o pulso de sinal correspondendo à posição para um calculador de correção de lente de estabilização de imagem 107.
A partir dos resultados de detecção do detector de comprimento focal 163 e do detector de distância do objeto 164, a posição do ponto principal A do sistema óptico de disparo fotográfico 105 é calculado conforme será descrita mais tarde. Altemativamente, a informação posicionai do ponto principal A do sistema óptico de disparo fotográfico 105 armazenada na EEPROM 162 é lida, e controle que será descrito mais tarde é efetuado.
A CPU do corpo 109 em um processador central que efetua vários controles do inteiro sistema de câmera. A CPU do corpo 109 transmite um comando de início de correção de borrão para a CPU da lente 106 com base na operação de ON da comutador de liberação 191. Altemativamente, a CPU do corpo 109 transmite um comando de parada de correção de borrão para a CPU da lente 106 com base na operação de OFF do comutador de liberação 191. Altemativamente, vários tipos de processamento são efetuados outros do que ele. Informação sob o comutador de liberação 191 é entrada para a CPU do corpo 109, e o comutador de liberação 191 pode detectar operação de meia depressão ou de totalmente depressão do botão de liberação não ilustrado. O comutador de liberação 191 é um comutador que detecta a operação de meia depressão do botão de liberação não ilustrado, inicia uma série de operações de preparação de disparo fotográfico, detecta uma operação de totalmente depressão do botão de liberação e inicia uma operação de disparo fotográfico.
A seguir, um interior do calculador de correção de estabilização de imagem 107 será descrita em detalhe.
Um calculador de velocidade angular de rotação 301 calcula uma velocidade angular de rotação 0^ com base no valor de saída do sensor de velocidade angular. O valor de saída do sensor de velocidade angular e a velocidade angular de rotação estão em geral na relação linear, e por conseguinte, a velocidade angular de rotação pode ser obtida multiplicando o valor de saída do sensor de velocidade angular por um coeficiente.
Um filtro passa alta 303 é um filtro que transmite a frequência componente necessário para correção de borrão. Um calculador de velocidade angular de revolução 304 pode obter a aceleração angular de revolução 0My dividindo um componente de aceleração de revolução jr^Ba*?que é o valor de entrada do filtro passa alta 303 por um comprimento focal do lado do objeto raxy.Adicionalmente, efetuando integração de tempo da aceleração angular de revolução, uma velocidade angular de revolução Òaxy requerida para controle é obtida.
Um calculador de quantidade de estabilização de imagem de diferença de revolução e rotação 305 calcula uma velocidade de movimento de imagem na direção Y2 da superfície de captura de imagem do dispositivo de captura de imagem 203 subtraindo uma ampliação de imagem lida : β, um valor de comprimento focal efetivo : f, e a velocidade angular de rotação θcaxye a velocidade angular de revolução θaxy, que são calculadas em tempo real, na seguinte expressão (15) que será descrita mais tarde.
A velocidade de movimento de imagem obtida se toma uma velocidade de operação alvo. A velocidade de movimento de imagem na direção Z2 da superfície de captura de imagem pode ser de forma similar obtida da expressão (16) que será descrita mais tarde, mas a descrição será aqui omitida.
Um seletor de fórmula teórica 306 seleciona se a fórmula de correção de movimento de diferença de revolução e rotação usando uma diferença entre a velocidade angular de rotação e a velocidade angular de revolução, ou a formula de correção de movimento de rotação usando somente uma velocidade angular de rotação como a formula usada para cálculo de correção de acordo com a proporção da velocidade angular de revolução para a velocidade angular de rotação. Significado e Método de uso da Expressão de Fórmula de Borrão de Revolução e Rotação Expressão (15)
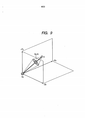
Na modalidade 1, os componentes do tremor da câmera (movimento de ângulo de arfagem e movimento paralelo na direção Y2) no plano XY são expressos pela formula de movimento de revolução e rotação, e a velocidade do movimento de imagem na superfície de captura de imagem na direção Y2 (movimento de imagem da direção vertical na superfície de captura de imagem) é obtida pela Expressão (15) que é a expressão aproximada da formula de movimento de revolução e rotação. Na descrição da presente invenção, "vetor R" é descrito como "R".
onde
representa um vetor de velocidade de movimento de imagem em uma superfície de captura de imagem, β representa uma ampliação de imagem [ (sem unidade) ] no momento da correção de imagem borrada da lente de disparo fotográfico desta câmera, f representa um comprimento focal efetivo [mm] no momento de correção de imagem borrada da lente de disparo fotográfico desta câmera, (1+β)f representa um comprimento focal do lado da imagem [mm], θaxy, representa valor derivativo de tempo do ângulo de rotação θCaXy com o ponto principal A como o centro, velocidade angular de rotação [rad/s], θaxy representa valor derivativo de tempo de ângulo de revolução Gaxy com uma origem 0 como o centro, e a velocidade angular de revolução [rad/s],
representa que o vetor de velocidade de movimento de imagem indica a direção girada de 90 graus a partir do eixo X2 (eixo óptico) no sistema de coordenada polar por causa da (π/2)a potência.
O procedimento de derivação detalhado da formula teórica da aproximada da velocidade de movimento de imagem
sistema de coordenada de coordenada de movimento O2-X2Y2 no plano XY que é a expressão (15) será descrito mais tarde, e aqui, o significado desta formula será descrito com referência à Fig. 2.
A FIG. 2 mostra um diagrama esquemático de um estado de uma câmera que é projetado em um plano XY. Aqui, a forma externa e a lente da câmera são ilustradas. Na câmera, um ponto principal Axydo sistema óptico, um acelerômetro Bxy, um centro Cxy do dispositivo de captura de imagem 203 são ilustrados. Uma origem O4 do sistema de coordenada O4- X4Y4 é fixo para um ponto principal Axy do sistema óptico. Quando o ponto principal Axy é movido, um eixo X4 mantém um estado paralelo com relação ao eixo X, e um eixo Y4 mantém o estado paralelo com relação a um Eixo y. Uma origem O2 de um sistema de coordenada O2-X2Y2 é fixo para o ponto principal Axy, e se move integralmente com a câmera. Neste caso, o eixo X2 é sempre coincidido com o eixo óptico desta câmera.
O ângulo em tomo dá origem 02 a partir do eixo X4 para o eixo X2 é configurado como o ângulo de rotação θcaxy. O ângulo em tomo da origem 0 a partir do eixo X para uma escalar raxy é configurado como um ângulo de revolução θaxy. O escalar raxy«(l+β)f/β representa um comprimento focal do lado do objeto, β é uma ampliação de imagem. Um vetor de aceleração de gravidade Gxy no ponto principal Axy tem um ângulo θxy em tomo do ponto principal Axy a partir do eixo X4 para o vetor Gxy por rotação normal (sentido anti-horário). O θgxy é um valor constante.
A expressão aproximada significa que a velocidade de movimento de imagem na direção Y2 na superfície de captura de imagem pode ser expressa por - (comprimento focal do lado de imagem) x (valor obtido subtraindo a velocidade angular de revolução da velocidade angular de rotação). A formula exata sem aproximação é a expressão (12). Quando correção de imagem borrada com maior precisão é efetuada, a expressão da formula exata (12) pode ser usada. Aqui, raxy « (1+β)f/β representa o comprimento focal do lado do objeto.
De forma similar ao caso do plano XY, os componentes de movimento de ângulo de guinada do tremor da câmera no plano ZX e o movimento paralelo na direção Z2 são expressos pela formula de movimento de revolução e rotação, e a velocidade do movimento de imagem na direção de Z2 (movimento de imagem na direção lateral da superfície de captura de imagem) na superfície do dispositivo de captura de imagem é obtida pela expressão aproximada expressão (16). Isto significa a mesma coisa que a expressão (15), e, por conseguinte, a descrição será aqui omitida.
A seguir, o componente incluído na saída do acelerômetro 121 será descrito. O procedimento de derivação da formula será descrito mais tarde. Aqui, os itens necessários para estabilização de imagem serão descritos. A saída do acelerômetro ACCy2(o-x2Y2) na direção do eixo Y2, que é usada para obter a velocidade angular de revolução θaxy é representada pela expressão (27).
(terceiro termo: aceleração de revolução)
(quarto termo: força de Coriolis)
(quinto termo: força centrípeta de rotação)
(sexto termo: aceleração de rotação)
(sétimo termo: componente de aceleração da gravidade) (27)
O terceiro termo jraxyθaxy na expressão (27) é o componente requerido para obter a velocidade angular de revolução θaxy que é desejada ser obtida na modalidade 1, e se o terceiro termo é dividido pelo conhecido raxy, e é integrado, a velocidade angular de revolução θaxy é obtida. O quarto termo, o quinto termo, o sexto termo, e o sétimo termo são termos não requeridos para cálculo, e ao menos que eles sejam apagados, ele se tomam os componente de erro no momento de obter a velocidade angular de revolução θaxy. O quarto termo j2raxyθaxy representa força de Coriolis, e se o movimento na direção do eixo óptico da câmera é pequeno, a velocidade na direção do eixo óptico raxy~0 o quarto termo é o termo que pode ser ignorado. Expressão (27) será também descrito mais tarde.
O quinto termo e o sexto termo são componentes de erro que são incluídos na saída do acelerômetro AcCy2(o-x2y2) já que o acelerômetro 121 não pode ser disposto na posição do ponto principal ideal A, e é disposto na posição B. O quinto termo
é a força centrípeta que é gerado devido à do acelerômetro 121 em tomo do ponto principal A. rbaxye θbaxy representam as coordenadas da posição B onde o acelerômetro 121 é montado, e são conhecidas. Òcaxy é a velocidade angular de rotação, e é o valor que pode ser medido pelo sensor de velocidade angular 130 montado na câmera. Por conseguinte, o valor do quinto termo pode ser calculado.
O sexto termo jrbaxy
é o componente de aceleração quando o acelerômetro 121 gira em tomo do ponto principal A, e rbaxy e θbaxy representam as coordenadas da posição B onde o acelerômetro 121 está montado, e são conhecidas. θcaxy pode ser calculado diferenciando o valor do sensor de velocidade angular 130 montado na câmera. Por conseguinte, o valor do sexto termo pode ser calculado.
O sétimo termo
é a influência da aceleração da gravidade, e pode ser tratado como a constante nesta expressão aproximada, e por conseguinte, pode ser eliminada pelo processamento de filtragem de um circuito.
A saída do acelerômetro ACCX2(O-X2Y2) na direção do eixo X2 que é um eixo óptico para uso na correção do movimento de direção do eixo óptico é representada pela expressão (26).
(primeiro termo: movimento na direção do eixo óptico)
(segundo termo: força centrípeta de revolução)
(quinto termo: força centrípeta de rotação)
(sexto termo: aceleração de rotação)
(sétimo termo: componente de aceleração da gravidade) (26)
Na expressão (26), o que é requerido para correção do movimento de direção do eixo óptico é somente o primeiro termo rMy (aceleração na direção do eixo óptico). O segundo termo, o quinto termo, o sexto termo e o sétimo termo são os componentes não requeridos para a 5 correção do movimento de direção do eixo óptico, e ao menos que eles sejam apagados, eles se tomam componentes de erro no momento de obter a aceleração na direção do eixo X2 que é o eixo óptico. O segundo termo, o quinto termo, o sexto termo e o sétimo termo podem ser eliminados pelo método similar para o caso da expressão (27). Expressão (26) também será 10 descrita mais tarde.
Conforme descrito acima, os componentes de erro incluído na saída do acelerômetro 121 podem ser apagados, mas se o cálculo de correção é efetuado, início da operação de correção de borrão é retardada pelo tempo de cálculo, e correção de borrão apurada não pode ser feita.
Assim sendo, com base no seguinte conceito, o acelerômetro 121 é colocado no cilindro de lente 102, e por meio disso, o componente de erro incluído na saída do acelerômetro 121 pode ser minimizado. Por conseguinte, o tempo de cálculo de correção não é requerido, e por meio disso, correção de borrão apurada pode ser feita.
A FIG. 3 é uma vista seccional do cilindro de lente 102, e é para descrever o arranjo do sistema óptico de disparo fotográfico 105, o acelerômetro 121 e o sensor de velocidade angular 131. Na Fig. 3, o ponto principal do sistema óptico de disparo fotográfico 105 está localizado no eixo óptico I, e de acordo com a ampliação de imagem configurada pelo usuário, o ponto principal do sistema óptico de disparo fotográfico se move no eixo óptico I dentro da distância a partir do posição do ponto principal Al no momento do disparo fotográfico de ampliação igual (como o tempo de disparo fotográfico de proximidade) para o posição do ponto principal A2 no momento do disparo fotográfico infinito (0 = 0,0). Mais especificamente, o ponto principal se move no eixo óptico I dentro da variação do ponto (primeiro ponto) no qual a ampliação do disparo fotográfico p se toma 1,0 e o segundo ponto que é a posição do ponto principal na qual ampliação do disparo fotográfico p se toma 0,0 no sistema óptico de disparo fotográfico. O sensor de velocidade angular 131 é colocado em uma posição arbitrária do cilindro de lente 102, mas o acelerômetro 121 é colocado na posição da direção do eixo óptico I entre a posição do ponto principal Al (primeiro ponto) no momento do disparo fotográfico de ampliação igual e a posição do ponto principal A2 (segundo ponto) no momento de disparo fotográfico para infinito.
Por exemplo, o acelerômetro 121 é colocado na posição na direção do eixo óptico, onde a ampliação do disparo fotográfico 0 se toma 0,5.
A posição na direção do eixo óptico I do acelerômetro 121 é configurada como uma posição do ponto principal A3, a distância ma direção do eixo óptico I a partir da posição do ponto principal Al no momento do disparo fotográfico de ampliação igual é configurada como ΔX, e a distância na direção perpendicular ao eixo óptico I é configurada como ΔY. E por meio disso, na expressão (27), no caso de disparo fotográfico de ampliação igual,
é satisfeita. A saber,
é satisfeita.
Aqui, a soma do quinto termo e do sexto termo que são os termos não requeridos na expressão (27) é expressa como uma função de erro de posição do acelerômetro g(0ba) como a seguir.
Conforme descrito acima, o quarto termo na expressão (27) pode ser ignorado, e o sétimo termo também pode ser eliminado através do processamento de filtragem de um circuito. Por conseguinte, as saídas do acelerômetro 121 após o processamento de filtragem são o terceiro termo, o quinto termo e o sexto termo, e por conseguinte, quando a proporção da função de erro de posição do acelerômetro g(θba) incluída na saída do acelerômetro 121 e representada pela expressão (30) é configurada como uma função de proporção de erro f(θba), a função de proporção de erro f (θba) pode ser expresso como a seguir.
Daqui em diante, o acelerômetro 121 é assumido para ser disposto na posição com a ampliação do disparo fotográfico de β = 0,5. No que se expressa na expressão (31), raxy representa a função da ampliação do disparo fotográfico β, e como um resultado do estudo sério de um requerente presente, é conhecido que θaxy é na relação linear com a ampliação de imagem β. Por conseguinte, a expressão (31) pode ser expressa como a seguir.
Incidentalmente, é conhecido que mesmo se a postura do disparo fotográfico e a ampliação de imagem mudam, θcaxy e θcaxy são substancialmente constantes como um resultado do estudo de um requerente presente. Por conseguinte, a função de proporção de erro f(θba) mostrado na expressão (32) é como a seguir quando os valores de θcaxy e θeaxy são substituídos.
A FIG. 4A ilustra a proporção de erro em cada ampliação de imagem que é obtida obtendo o comprimento focal f do sistema óptico de disparo fotográfico 105 e a ampliação de imagem no tempo, na Expressão (33). FIG. 4A ilustra o erro no momento de dispor o acelerômetro 121 na ampliação de imagem 0 = 0,5 conforme descrito acima.
Subsequentemente, a proporção de erro em cada tempo quando o acelerômetro 121 é disposto na posição do ponto principal Al no momento do disparo fotográfico de ampliação igual do sistema óptico de disparo fotográfico 105 para a posição do ponto principal A2 no momento de disparo fotográfico para infinito. FIG. 4B e FIG. 5 ilustram as proporções de erro no momento de dispor o acelerômetro 121 na posição de ampliação igual e na posição infinita, por exemplo. FIG. 6 ilustra como o resultado de soma de produtos dos valores nas respectivas ampliações de imagem das proporções de erro obtidos como ilustrado nas Figs. 4A, 4B e 5 muda quando o acelerômetro 121 é disposto nas respectivas ampliações do disparo fotográfico. Como ilustrado na FIG. 6, é encontrado que quando o acelerômetro 121 é disposto na vizinhança da posição da ampliação de imagem 0 = 0,7, a proporção de erro se toma a menor quando comparada com o caso onde o acelerômetro 121 é disposto nas outras ampliações do disparo fotográfico. Por conseguinte, o componente de erro incluído na saída do acelerômetro 121 pode ser minimizado dispondo o acelerômetro 121 na vizinhança da posição da ampliação de imagem 0 = 0,7 do sistema óptico de disparo fotográfico 105, e, por conseguinte, tempo de cálculo de correção da saída do acelerômetro 121 se toma desnecessário.
Descrição de Fluxograma
As FIGS. 7A e 7B são fluxogramas ilustrando o fluxo da operação relacionado à correção da lente de estabilização de imagem do aparelho de estabilização de imagem in modalidade 1. Daqui em diante, a operação relacionado ao cálculo de quantidade de correção da lente de correção 101 será descrito de acordo com às Figs. 7A e 7B.
Na etapa (daqui em diante, descrito como S) 1010, quando o SW de correção de borrão 103 está em um estado de ON, um comando de início de correção é emitido a partir do corpo da câmera 201 por meia depressão ON do comutador de liberação 191. Recebendo o comando início de correção, a operação de correção de borrão é iniciada.
Em SI020, é determinado se um comando de parada de correção de borrão é ou não emitido do corpo de câmera 201, e quando é emitido, fluxo prossegue para SI400, e a operação de correção de borrão é parada. Quando ele não é emitido, o fluxo prossegue para SI030 para continuar a operação de correção de borrão. Consequentemente, uma operação de correção de borrão é continuada até um comando de parada de correção de borrão seja emitido a partir do corpo de câmera 201.
Em SI030, o valor numérico obtido a partir do detector de comprimento focal 163 é lido. O valor numérico do detector de comprimento focal 163 é usado para cálculo da ampliação de imagem 0. Em SI040, o valor numérico (distância absoluta) obtido a partir do detector de distância do objeto 164 é lido. Em SI050, a ampliação de imagem 0 é calculada com base no valor numérico do detector de comprimento focal 163 e no valor numérico do detector de na fórmula de cálculo de ampliação de imagem. A obtenção da ampliação de imagem 0 não especialmente tem de ser efetuada com base na formula, mas a ampliação de imagem pode ser obtida a partir de uma tabela com relação à posição de codificador do comprimento focal e a distância absoluta.
Em SI060, as saídas do sensor de velocidade angular 130 e o acelerômetro 121 são lidos. Em SI070, a velocidade angular de rotação é calculada com base no valor de saída do sensor de velocidade angular da S1310. O valor de saída do sensor de velocidade angular e a velocidade angular de rotação estão em geral na relação linear, e, por conseguinte, a velocidade angular de rotação pode ser obtida por multiplicação de um coeficiente.
Em S1410, é determinado se o comutador de liberação 191 é totalmente pressionado para estar ON, isto é, se o botão de liberação não ilustrado está totalmente pressionado. Se SIM, isto é, se é o tempo de exposição da câmera, o fluxo prossegue para SI420, e se NÃO, isto é, se é antes da exposição, o fluxo prossegue para SI090. Em SI090, processamento de filtragem é efetuado para o valor de saída do acelerômetro Accy2(o-X2Y2) da SI080, e o sétimo termo da expressão (27) é apagada. O valor após a eliminação é configurado como A’cCy2(o-x2Y2).
Em SI 100, o valor de saída de SI090: A ccy2(o-x2Y2) é dividido pelo comprimento focal do lado do objeto comprimento focal raxy, e por meio disso, a aceleração angular de revolução θaxy é obtida. Adicionalmente, efetuando integração de tempo da aceleração angular de revolução, a velocidade angular de revolução θaxy necessário para controle é obtida. No próximo SI 104, a proporção da velocidade angular de revolução para a velocidade angular de rotação obtida em SI070 é calculada. Na próxima SI 106, o valor da proporção de velocidade angular de revolução e rotação calculado em SI 104 é armazenado. Quando o valor anterior permanece, o novo um é escrito sobre o valor anterior e é armazenado, e o fluxo prossegue para SI 110.
Em SI420, o valor da proporção de velocidade angular de revolução e rotação armazenada em SI 106 no passado é lido, e o fluxo prossegue para SI 110. Em SI 110, é determinado se a proporção de um velocidade angular de rotação θcaxy de SI070 e a velocidade angular de revolução θaxy de SI 100 são ou não maiores do que 0,1 (maior do que o predeterminado valor). Quando a proporção é maior do que 0,1, o fluxo prossegue para SI 120. Quando a proporção é 0,1 ou menor (o predeterminado valor ou menos), o fluxo prossegue para SI 130.
No cálculo de correção de movimento de diferença de revolução e rotação de SI 120, a velocidade de movimento de imagem na direção Y2 da superfície de captura de imagem é calculada substituindo a ampliação de imagem lida β, o valor de comprimento focal efetivo f, o valor da velocidade angular de rotação θcaxy calculado em tempo real, e a velocidade angular de revolução estimada θaxy obtida multiplicando a proporção de velocidade angular de revolução e rotação armazenada na SI 106 pelo valor da velocidade angular de rotação θcaxy calculada em tempo real na expressão (15).
A velocidade de movimento de imagem obtida se toma a velocidade de correção alvo. A velocidade de movimento de imagem na direção Z2 da superfície de captura de imagem é de forma similar obtida da expressão (16), mas a descrição é aqui omitida.
No cálculo de correção de movimento de rotação de SI 130, a velocidade angular de revolução Õaxy que é substituída na expressão (15) é configurada como uma constante zero sem efetuar cálculo a partir da saída do sensor. Por conseguinte, expressão (15) é simplificada, e é escrita como a seguir.
Se a velocidade angular de rotação θcaxy da SI070 em tempo real é substituída na expressão (15), a velocidade de movimento de imagem na direção Y2 em tempo real é obtida.
Em SI 140, cálculo de controle de acompanhamento para operar a lente de correção 101 é efetuado, com consideração da sensitividade da lente de correção 101, com base na velocidade de movimento de imagem obtida pelo cálculo de correção de movimento de diferença de revolução e rotação (SI 120) ou pelo cálculo de correção de movimento de rotação (SI 130). Neste momento, a presente posição emitida da lente de correção 101 é, de forma simultânea, monitorada.
Em SI 150, o resultado do cálculo é emitido para o acionador de voltagem 161 que opera a lente de correção 101 com base no cálculo de controle de acompanhamento resultado em SI 140. Após o resultado do cálculo ser emitido para o acionador de voltagem 161, o fluxo retoma para SI 020.
Em SI300, é determinado se a ampliação de imagem 0 é ou não 0,15 ou mais. Quando a ampliação de imagem 0 é 0,15 ou mais, o fluxo prossegue para SI320. Quando a ampliação de imagem 0 é menor do que 0,15 em SI300, o fluxo prossegue para S1410.
Em SI320, efetuando processamento de filtragem para o valor de saída do sensor de velocidade angular ACCX2(0-X2Y2) na direção do eixo X2 (eixo óptico) da S1310, o sétimo termo não requerido da expressão (26) é apagado, e por integração de tempo do valor, a velocidade de movimento na direção do eixo óptico rmy é obtida.
Em SI330, com base na velocidade de borrão na direção do eixo óptico da SI320, cálculo de controle de acompanhamento para operar a lente de auto-foco 140 é efetuado. Em SI340, com base no resultado do cálculo de controle de acompanhamento na SI330, o resultado de cálculo é emitido para o acionador de voltagem da lente de auto-foco 172 que opera a lente de auto-foco 140, e daí em diante, o fluxo retoma para SI020.
Descrição Detalhada do Diagrama de Modelo de Revolução e Rotação e da Fórmula de Movimento de Revolução e Rotação
Daqui em diante, descrição de um diagrama modelo de revolução e rotação e descrição de uma fórmula de movimento de revolução e rotação será efetuado. Primeiro, o sistema de coordenada do aparelho de estabilização de imagem será descrita.
Primeiro, um sistema de coordenada de movimento O2-X2Y2Z2 que é fixo para a câmera será descrito. No momento da câmera sendo tremida, o sistema de coordenada O2-X2Y2Z2 efetua movimento de trepidação integralmente com a câmera, e por conseguinte, o sistema de coordenada é chamado de sistema de coordenada em movimento.
Um sistema de coordenada tridimensional será descrita com um diagrama de sistema de coordenada tridimensional da Fig. 8A. O sistema de coordenada é um sistema de coordenada ortogonal, e como na Fig. 8A, o eixo X2, o eixo Y2 e o eixo Z2 são ortogonais cada uma ao outro. Arfagem é definida como a rotação sobre o eixo Z2 em tomo da origem O2 e a arfagem a partir do eixo +X2 para o eixo +Y2 é atribuído com mais sinal com a origem O2 como o centro. Guinada é definido como a rotação sobre o eixo Y2 em tomo na origem O2 e o guinada a partir do eixo +Z2 para o eixo +X2 é atribuído com mais sinal. Rolagem é definido como a rotação sobre o eixo X2 em tomo da origem O2 e o rolagem a partir do eixo +Y2 para o eixo +Z2 é atribuído com mais sinal.
A FIG. 8D é uma vista lateral da câmera com a vista transversal da câmera da Fig. 1 sendo simplificada, e a lente é ilustrada no estado translucente. Com a vista lateral da câmera da Fig. 8D, o sistema de coordenada O2-X2Y2Z2 que é fixo à câmera será descrito.
A origem O2 do sistema de coordenada é fixo ao ponto principal A do inteiro sistema óptico (sistema óptico de disparo fotográfico 105) que existe no cilindro de lente 102, e o dispositivo de captura de imagem direção no eixo óptico é configurado como a direção mais do eixo X2. A direção superior da câmera (direção superior deste desenho) é configurado como a direção mais do eixo Y2, e a direção restante é configurada como o eixo Z2 mais. No estado no qual a câmera é projetado em um plano X2Y2, uma posição B do acelerômetro 121 é expresso por um comprimento de segmento de linha rbaxy entre a origem O2 e a posição B do acelerômetro 121, e um ângulo θbaxy formado pelo eixo X2 e o segmento de linha rbaxy. A direção rotacional na direção para o eixo Y2 mais a partir do eixo X2 mais com o eixo 02 como o centro é configurado direção mais.
A vista de topo da câmera da Fig. 8B, ilustra a posição B do acelerômetro 121 no estado projetado em um plano Z2X2. No estado no qual a câmera é projetada no plano Z2X2, a posição B do acelerômetro 121 é expresso por um segmento de linha rbazx entre a origem O2 e a posição B do acelerômetro 121 e um ângulo \|/bazx formado pelo eixo Z2 e o segmento de linha rbazx. A direção rotacional na direção para o eixo +X2 a partir do eixo +Z2 é configurado como direção mais. Adicionalmente, a posição B é também expressa por um ângulo Çba2x formado pelo eixo X2 e o segmento de linha rbazz- A direção rotacional na direção para o eixo +Z2 a partir do eixo +X2 é configurado como direção mais.
A vista frontal da câmera da Fig. 8C ilustra a posição do acelerômetro 121 no estado projetado em um plano Y2Z2. No estado projetado no plano Y2Z2, a posição B do acelerômetro 121 é expresso por um comprimento de segmento de linha comprimento rbayz entre a origem O2 e a posição B do acelerômetro 121, e um ângulo pbayz formado entre o eixo Y2 e o segmento de linha rbayz. A direção rotacional na direção do eixo +Z2 a partir do eixo +Y2 com o eixo 02 como o centro é configurado como direção mais.
A seguir, um sistema de coordenada fixa O9-X9Y9Z9 onde um objeto S está presente será descrito. O sistema de coordenada O9-X9Y9Z9 é integral com o objeto, e por conseguinte, será chamado um sistema de coordenada fixo.
A FIG. 9 é um diagrama expressando somente o sistema óptico da câmera em um espaço tridimensional. Um ponto A = Oj é o ponto principal A do sistema óptico de disparo fotográfico 105 já descrito, e é também uma origem O4 do sistema de coordenada O4-X4Y4Z4.
A disposição do estado inicial (tempo t = 0) do sistema de coordenada fixa O9-X9Y9Z9 será descrita. Uma origem de coordenada O9 é coincidida com o objeto a ser fotografado. Um eixo de coordenada +Y9 é configurado na direção oposta à direção de aceleração de gravidade da Terra. Os eixos de coordenada restantes +X9 e +Z9 são de forma arbitrária, dispostos. Um ponto D é um ponto de tratamento da imagem do objeto S, e está presente geométrica opticamente na extensão de um segmento de linha OA.
Com a FIG. 10A, um método de expressão tridimensional do ponto principal A no sistema de coordenada fixa O9-X9Y9Z9 será descrito. Já que a posição da câmera é ilustrada no espaço, somente o ponto principal A para ser a referência é ilustrado na Fig. 10A, e as outras porções tal como o ponto de tratamento da imagem D e o similar não são ilustrados. O ponto principal A é mostrado pelo vetor com a origem O9 como a referência, e é configurado como Ra. O comprimento do Ra é configurado como um escalar ra. Um ângulo para o do eixo Z9 com O9 conforme o centro é configurado como ya. Um ângulo a partir do eixo X9 de uma linha reta OJ, que é a linha de interseção entre um plano incluindo o Ra e o eixo Z9 e o plano XY, é configurado como 0a.
Conforme descrito acima, Ra pode ser expresso no sistema de coordenada polar por três valores do escalar ra, o ângulo ψa, e ângulo θa. Se os três valores podem ser calculados a partir da medição por um sensor e o similar, a posição do ponto principal A da câmera é obtida. Referência: fórmula de transformação do sistema de coordenada ortogonal
Neste caso, a formula para transformar a posição do ponto principal A em um sistema de coordenada ortogonal a partir de um sistema de coordenada polar é a seguinte formula.
Na Fig. 10B, o sistema de coordenada ortogonal é ilustrado. Xa = rasenψaxcosθa Ya = rasenψaxsenθa Za = racosψa
(Descrição dos Sistemas de Coordenadas de Projeção)
A seguir, a expressão de coordenada quando o Ra é projetado no plano X9Y9 e a expressão quando ela é projetada no plano Z9X9 será descrita com referência à Fig. 11. Com a FIG. 11, um sistema de coordenada de movimento O4-X4Y4Z4 será descrito. O sistema de coordenada de movimento O4-X4Y4Z4 é também fornecido para o ponto principal A. A origem O4 é fixa para o ponto principal A. Mais especificamente, a origem O4 também se move com movimento do ponto principal A. O eixo de coordenada +X4 está sèmpre disposta estar em paralelo com o eixo de coordenada +X9, e um eixo de coordenada +Y4 está sempre disposto em paralelo com o eixo de coordenada +Y9. O paralelismo é sempre mantido quando o ponto principal A se move.
A direção da aceleração da gravidade G no ponto principal A é uma direção menos do eixo de coordenada Y9.
Expressão de coordenada bidimensional quando sendo projetada no plano X9Y9 será descrita. Na Fig. 11, o ponto que é o ponto principal A projetado no plano X9Y9 é configurado como um ponto principal Axy. O segmento de linha entre a origem O9 e o ponto principal Axy é configurado como o escalar raxy, e o ângulo para o escalar raxy do eixo X9 com a origem O9 como o centro é configurado como θaxy. O ângulo θaxy é o mesmo ângulo que θa descrito acima. De modo a esclarecer o fato que este é o ângulo projetado no plano X9Y9, caracteres de referência xy é atribuído.
A FIG. 12 ilustra o estado de câmera projetado no plano X9Y9. Neste caso, a forma externa e a lente da câmera são também ilustradas. A origem O4 do sistema de coordenada O4-X4Y4 é fixo ao ponto principal Axy que é descrito acima. Quando o ponto principal Axy é movido, o eixo X4 mantém um estado paralelo com o eixo X9, e o eixo Y4 mantém um estado em paralelo com o eixo Y9.
Conforme descrito acima, a origem O2 do sistema de coordenada O2-X2Y2 é fixo ao ponto principal Axy, e se move integralmente com a câmera. Neste momento, o eixo X2 é sempre coincidente com o eixo óptico desta câmera. O ângulo no momento está sendo girado para o eixo X2 a partir do eixo X4 com a origem O2 como o centro é configurado as θcaxy (= θca: completamente o mesmo valor). A aceleração de gravidade no ponto principal Axy está na rotação positiva (sentido anti-horário) a partir do eixo X4 com o ponto principal Axy como o centro, e o ângulo para Gxy é configurado como θgxy O θgxy é um valor constante.
Aqui, os termos usados na presente invenção serão descritos. Na presente invenção, sendo comparado ao movimento do sol e da terra, a origem O9 onde o objeto está presente é comparado ao sol, e o ponto principal A da câmera é comparada ao centro da terra. O ângulo θaxy é chamado "o ângulo de revolução" dentro do plano XY, e o ângulo θcaxy é chamado "o ângulo de rotação" dentro do plano XY. Mais especificamente, isto é similar ao ato que revolução indica que a terra (câmera) gira em tomo do sol (objeto), ao passo que rotação indica a própria terra (câmera) roda.
A seguir, expressão de coordenada bidimensional quando a câmera é projetada no plano Z9X9 será descrita. FIG. 13 ilustra o estado de câmera projetado no plano de Z9X9. Aqui, a forma externa e a lente da câmera são também ilustradas. A origem O4 do sistema de coordenada O4-Z4X4 é fixo ao ponto principal Azx. Quando o ponto principal Azx é movido, o eixo Z4 mantém um estado paralelo com o eixo Z9, e o eixo X4 mantém um estado paralelo com o eixo X9.
A origem O2 do sistema de coordenada O2-Z2X2 é fixo ao ponto principal Azx, e se move integralmente com a câmera. Neste momento, o eixo X2 é sempre coincidente com o eixo óptico da câmera. O ângulo no momento de ser girado para o eixo X2 a partir do eixo Z4 com a origem O2 como o centro é configurado como ψcazx- Adicionalmente, o ângulo no momento de ser girado para o eixo X2 a partir do eixo X4 com a origem O2 como o centro é configurado como Çcazx.
No sistema de coordenada tridimensional da Fig. 14, um estado inicial da câmera em um tempo inicial de um tempo t = 0 será descrito. A descrição será feita na suposição que no sistema de coordenada fixa O9- X9Y9Z9, um fotógrafo força o objeto S(t = 0) a ser fotografado a corresponder ao centro do visor ou do monitor de cristal líquido (LCD), e o objeto S(t = 0) está no eixo óptico por conveniência neste caso. A origem O9 é forçada a corresponder ao objeto S(t = 0). O ponto principal A do sistema óptico de disparo fotográfico 105 e ponto de tratamento da imagem D onde a imagem do objeto S (t = 0) é formada estão presente geométrica e opticamente no eixo óptico de uma linha reta. A aceleração de gravidade G na posição do ponto principal A está na direção menos do eixo de coordenada Y9.
Se o fotógrafo força o objeto S desejado a ser fotografado a corresponder o quadro de auto-foco (AF) outro do que o centro do visor ou o monitor de cristal líquido (LCD), o segmento de linha conectando o objeto S e o ponto principal A são configurados como um Ra e podem ser modelados.
A seguir, um novo sistema de coordenada fixa O-XYZ é configurado. A origem O do sistema de coordenada fixa O-XYZ é forçado a corresponder a origem O9, e o eixo de coordenada X é forçado a corresponder ao eixo óptico da câmera. A direção do eixo de coordenada Y é configurada tal que o eixo de coordenada Y9 está presente dentro do plano XY. Se o eixo de coordenada X e o eixo de coordenada Y são configurados, o eixo de coordenada Z é de modo único, configurado.
Como ilustrado na FIG. 15, para conveniência da descrição, o sistema de coordenada fixa O9-X9Y9Z9não será ilustrado, e somente o sistema de coordenada fixa O-XYZ será ilustrado como o sistema de coordenada fixa daqui em diante. Pela definição supracitada do sistema de coordenada, n o estado inicial no momento t = 0, aceleração de gravidade G está presente dentro do plano XY.
A seguir, a expressão borrão mostrando a relação do tremor da câmera e o movimento de imagem é derivada. De modo a facilitar a expressão da expressão matemática, a expressão sistema de coordenada polar é usada. Adicionalmente, a primeira ordem derivativa e a segunda ordem derivativa do vetor e do ângulo são efetuadas. Assim sendo, usando FIG. 16 que é um diagrama básico explicativo de um sistema de coordenada polar, o significado dos códigos na expressão matemática que é comum e usado aqui será descrito. A expressão posicionai do ponto A que está presente no sistema de coordenada 0-XY é mostrado por uma posição R. A posição R é a função de um tempo, e pode ser também descrito as R(t). Vetor de posição:
O termo real rcosO é o componente da direção X, e o termo imaginário jrsenO é o componente da direção Y. Expresso na sistema de coordenada ortogonal, o componente da direção X é Ax=rcosθ, e o componente da direção Y é Ax = rsenθ.
A seguir, a velocidade V=R é obtida pela primeira ordem derivativa da posição R pelo tempo time t. Vetor de velocidade :
Expressa no sistema de coordenada ortogonal, o componente da direção X é
e o componente da direção Y é
A seguir, a aceleração R é obtida pela primeira ordem derivativa da velocidade pelo tempo t. Vetor de aceleração:
onde o primeiro termo:
representa o componente de aceleração de uma mudança do comprimento r, o segundo termo:
representa o componente de força centrípeta, o terceiro termo:
representa o componente de aceleração angular, e o quarto termo:
representa o componente de força Coriolis.
Expresso no sistema de coordenada ortogonal, o vetor de aceleração é obtida pelas seguintes expressões (4a) e (4b). componente da direção X Àx::
componente de direção Y: À :
A formula teórica da presente invenção será descrita no sistema de coordenada XY bidimensional quando a câmera é projetada no plano XY ilustrado na Fig. 17. Na Fig. 17, configuração do sistema de coordenada e códigos do sistema de coordenada XY bidimensional será também descrito. Descrição será feita parcialmente incluindo o conteúdo que está já descrito.
O objeto S é disposto no sistema de coordenada fixa O-XY. No desenho do estado inicial em um tempo t=0, os códigos serão descritos. No estado inicial (t = 0), o eixo óptico da câmera corresponde ao eixo de coordenada X do sistema de coordenada fixa O-XY. No estado inicial (t = 0), o objeto S corresponde à origem O do sistema de coordenada fixa O-XY. No sistema de coordenada fixa O-XY, o ponto principal A é expresso pelo R^y. O comprimento do segmento de linha entre a origem 0 e o ponto principal A da câmera é configurado como o escalar raxy, e o ponto onde a origem O forma uma imagem pela lente é configurado como um ponto D formando uma imagem. Um ponto C é um ponto central do dispositivo de captura de imagem 203, e no estado inicial (t = 0), o ponto de tratamento da imagem D corresponde ao ponto C.
No diagrama de estado de movimento em um determinado tempo (t = t2), os códigos serão descritos. A origem O4 do sistema de coordenada O4-X4Y4 é fixo ao ponto principal A, o eixo de coordenada X4 é sempre mantido em paralelo com o eixo de coordenada X, e o eixo de coordenada Y4 é sempre mantido paralelo com o eixo de coordenada Y. A origem O2 do sistema de coordenada O2-X2Y2 é fixa ao ponto principal A, e o eixo de coordenada X2 é sempre mantido na direção do eixo óptico da câmera.
O acelerômetro 121 é fixo para o ponto B dentro da câmera, e é expresso por Rbaxy no sistema de coordenada O2-X2Y2. O comprimento de um segmento de linha AB é configurado como o escalar rbaxy e o ângulo girado para o segmento de linha AB a partir do eixo de coordenada X2 com a origem O2 como o centro é configurado com θbaXy.
A imagem da origem 0 forma uma imagem na posição de um ponto D diferindo do ponto C do centro do dispositivo de captura de imagem pela lente. O ponto de tratamento da imagem D com o ponto principal A como a referência é expressa por .Rdaxy O ponto D com o ponto C como a referência é expresso por Rdaxy. Um escalar rdcxy que é o comprimento do ponto C para o ponto D é o comprimento pelo qual um ponto D de formação de imagem se move a partir do tempo t = 0 à t2. O vetor de velocidade de movimento relativa do ponto D de formação de imagem com relação ao ponto C no sistema de coordenada de movimento O2-X2Y2 em um determinado tempo t2 é configurado como Vdcxy(O2-X2Y2).
No sistema de coordenada fixa 0-XY, o ângulo formado para o Ãary ã partir do eixo de coordenada X com a origem 0 como o centro é configurado como um ângulo de rotação 0^. No sistema de coordenada de movimento O4-X4Y4, o ângulo formado a partir do eixo de coordenada X4 para o eixo de coordenada X2 com a origem O4 como o centro é configurado como um ângulo de revolução θcaxy.
A primeira ordem derivativa do Raxy pelo tempo t é descrita como Raxy, e a segunda ordem derivativa deste é descrita como Raxy. O Rcaxy é de forma similar descrito como Rcaxy e Rcaxy, o Rdaxy é de forma similar descrito como Rdaxy e Rdaxy e o ângulo de revolução θaxy é de forma similar descrito como e Óaxy, e o ângulo de rotação θcaxy e de forma similar descrito como θcaxy e θcaxy.
Em um determinado tempo t2, uma velocidade de movimento relativa V dcx(O2-X2Y2) do ponto de tratamento da imagem D com o ponto C como a referência no sistema de coordenada de movimento O2- X2Y2 é obtido. Uma velocidade de movimento Vdaxy(O-XY) no ponto de tratamento da imagem D no sistema de coordenada fixa 0-XY é obtida através da seguinte expressão (5).
A velocidade de movimento Vcaxy(O-XY) do centro do dispositivo de captura de imagem C no sistema de coordenada fixa O-XY é obtida através da seguinte expressão (6).
Expressão (7) é derivada de uma fórmula de formação de 5 imagem de óptica geométrica
, onde f representa o comprimento focal do sistema óptico. Expressão (7) é modificada.
A partir da expressão acima, a velocidade de movimento relativa Vdcxy(O-XY) do ponto de tratamento da imagem D com relação ao ponto C no sistema de coordenada fixa O-XY é obtida a partir da seguinte expressão (8).
A relação entre o escalar rcazy e o escalar raxy(t=0) é obtida a partir da seguinte expressão (9).
Substituindo a expressão descrita acima, a velocidade de movimento relativa no sistema de coordenada fixa O-XY é obtida pela seguinte expressão (10).
A seguir, a coordenada é convertida a partir do sistema de coordenada fixa O-XY no sistema de coordenada de movimento O2-X2Y2 fixo na câmera. Para isto o é girado pelo ângulo de rotação (-θcaxy)- Por conseguinte, a velocidade de movimento de imagem no sistema em movimento O2-X2Y2 fixo na câmera é obtida a partir da seguinte expressão (11).
Quando a expressão é ainda organizada, a expressão (12) supracitada é obtida. Já que a velocidade de movimento de imagem Vdcxy (O2-X2Y2) no sistema de coordenada de movimento O2-X2Y2 é a velocidade de movimento de imagem relativa com relação a uma superfície de captura de imagem da câmera, a expressão é uma expressão estritamente expressando o movimento da imagem que é efetivamente gravada como uma imagem, Nesta estrita expressão, a parte imaginária, a saber, o componente da direção do eixo de coordenada Y2 é um componente de movimento de imagem na direção vertical da câmera dentro de uma superfície de captura de imagem. Adicionalmente, a parte real da expressão (12), a saber, o componente na direção do eixo de coordenada X2 é um componente de movimento de imagem na direção do eixo óptico da câmera, e é um componente pelo qual uma assim chamada imagem borrada ocorre.
O tremor da câmera devido a mão de um fotógrafo é considerado ser um movimento de vibração com uma muito pequena amplitude com um determinado ponto no espaço como o centro, e por conseguinte, a velocidade de movimento de imagem Vdcxy (O2-X2Y2)no sistema de coordenada de movimento O2-X2Y2 que é estritamente obtida é transformada em uma expressão aproximadas sob as seguintes condições. O estado no determinado tempo t2 é assumido ser a vibração na vizinhança do estado inicial no momento t = 0, e a seguinte expressão (13) é obtida.
Quando transformada, obtendo
Se este
são substituídos em Vdcxy (O2-X2Y2) a seguinte expressão (14) é derivada.
Por conseguinte, a fórmula teórica aproximada da velocidade de movimento de imagem Vdcxy (O2-X2Y2) no sistema de coordenada de movimento O2-X2Y2 dentro do plano XY se toma a expressão (15) supracitada. O componente representando o vetor de direção do movimento de imagem do lado direito da expressão (15) é

, e, por conseguinte, uma direção do movimento de imagem é a direção do eixo Y2 na direção em 90 graus a partir do eixo X2. θcaxy representa a velocidade angular de rotação em tomo do ponto principal A, e representa a velocidade angular de revolução do ponto principal A em tomo da origem 0 do sistema de coordenada fixa. P representa uma ampliação de imagem deste sistema óptico, e f representa o comprimento focal efetivo. (1+β)f representa um comprimento focal do lado da imagem. Por conseguinte, esta expressão aproximada significa que a velocidade de movimento da imagem na direção Y2 dentro da superfície de captura de imagem é -(comprimento focal do lado da imagem) x (valor obtido subtraindo a velocidade angular de revolução a partir de uma velocidade angular de rotação).
Com FIG. 18, a fórmula teórica do movimento de imagem da presente invenção no sistema de coordenada ZX bidimensional quando projetado no plano ZX será descrita. Quando o tremor é um muito pequeno movimento de vibração com a posição de estado inicial como o centro, as condições aproximada são tais que
valor constante,
. A partir das condições aproximadas, a fórmula teórica aproximada da velocidade de movimento de imagem Vdcxy(O2-Z2Y2) n0 sistema de coordenada de movimento O2-Z2X2 dentro do plano ZY é como a seguinte expressão (16) pelo procedimento similar para a fórmula aproximada VdcXy(o2-x2Y2)no plano XY.
O componente representando a direção do vetor de imagem borrada do lado direito da expressão (16) é e^2, e por conseguinte, a direção de movimento de imagem é a direção do eixo Z2 na direção em 90 graus a partir do eixo X2. Çcazx representa uma velocidade angular de rotação em tomo do ponto principal A, e representa uma velocidade angular de revolução do ponto principal A em tomo da origem O do sistema de coordenada fixa, 0 representa a ampliação de imagem deste sistema óptico, e f representa o comprimento focal efetivo deste sistema óptico. (l+β)f representa o comprimento focal do lado da imagem. Por conseguinte, a fórmula aproximada significa que a velocidade de movimento de imagem na direção de X2 dentro da superfície do dispositivo de captura de imagem é - (comprimento focal do lado da imagem) x (valor obtido subtraindo a velocidade angular de revolução da velocidade angular de rotação).
O sinal de saída do acelerômetro 121 será também descrito. No plano de coordenada XY, a velocidade angular de revolução no ponto principal A pode ser expresso como a seguir.
Por conseguinte, a aceleração Ra pode ser medida e calculada. Nesta modalidade, o acelerômetro 121 é fixo para o ponto B, e por conseguinte, o valor de aceleração no ponto A necessita ser obtido através do cálculo com base na saída do acelerômetro no ponto B. Aqui, o valor de 5 diferença entre a aceleração no ponto B e aquele no ponto principal A onde o acelerômetro é efetivamente disposto, e valor de aceleração teórico no ponto B são obtidos. O componente (termo) que é desnecessário no controle de do borrão de imagem é clarificado (eliminado).
Primeiro, um vetor de aceleração que ocorre no ponto
principal A no sistema de coordenada fixa O-XY é obtido a partir da seguinte expressão (17).
(primeiro termo: componente de aceleração de uma mudança de comprimento ra)
(segundo termo: força centrípeta)
(terceiro termo: componente de aceleração angular)
(quarto termo: componente de força de Coriolis)
(componente de aceleração da gravidade G) (17) (Aqui, a gravidade G trabalha sobre o acelerômetro 121 como uma força de reação, e por conseguinte, 180 graus é subtraído do ângulo 0gxy representando a direção da gravidade). A aceleração relativa Rbaxy(O-xy) no 15 ponto B com relação ao ponto principal A no sistema de coordenada fixa O- XY será obtida. Primeiro, a posição relativa Rbaxy(O-xy) é obtida a partir da seguinte expressão (18).
Se a primeira ordem derivativa da expressão (18) é efetuada pelo tempo t, o vetor de velocidade pode ser obtido. Já que os pontos A e B são fixos para o mesmo corpo rígido, a velocidade relativa Rbaxy(O-XY) é obtida a partir da seguinte expressão (19) a partir de rbaxy = 0,0baxy=valor constante, rbaxy = 0, e θcaxy =valor componente θbaxy=0, e θcaxy=componente de rotação (variável).
A seguir, o vetor de aceleração é obtido. O vetor de aceleração relativa Rbaxy(O-XY) no ponto B (posição do acelerômetro) com relação ao ponto A no sistema de coordenada fixa O-XY é obtido a partir da seguinte expressão (20).
O valor da expressão é a quantidade de erro do vetor de movimento devido ao fato que o acelerômetro 121 é efetivamente montado na posição B com relação ao ponto principal A que é uma posição ideal.
Uma aceleração Rbxy(O-XY) no ponto B no sistema de coordenada fixa O-XY é expressa pela soma dos vetores a partir da origem O para o ponto principal A já obtido e a partir do ponto principal A para o ponto B. Primeiro, a posição Rbxy(O-XY) no ponto B no sistema de coordenada fixa O-XY é expresso por meio do ponto principal A pela seguinte expressão (21). Vetor de posição :
Vetor de velocidade :
Vetor de aceleração :
A seguir, uma aceleração Rbxy(O2-X2Y2)no ponto B no sistema de coordenada de movimento O2-X2Y2 será calculada. A latitude (escalar) da aceleração desejada a ser calculada está no sistema de coordenada fixa O- XYZ onde o objeto está presente. Adicionalmente, a aceleração é fixa para o sistema de coordenada de movimento O2-X2Y2, as três eixos do acelerômetro 121 são orientados na direção do eixo X2, na direção do eixo Y2 e na direção do eixo Z2, e o componente de aceleração necessita ser expresso pelas direções dos eixos de coordenadas do sistema de coordenada de movimento O2-X2Y2.
O estado da disposição do acelerômetro 121 será descrita em detalhe. O acelerômetro 121 de saídas de três eixos é disposto no ponto B. No sistema de coordenada de movimento O2-X2Y2Z2, os eixos do acelerômetro são configurados para uma saída do acelerômetro ACCx2 com a direção de sensitividade na direção paralela com o eixo X2, uma saída do acelerômetro ACCy2 com a direção de sensitividade na direção paralela com o eixo Y2, e uma saída do acelerômetro ACcz2 com a direção de sensitividade na direção paralela com o eixo Z2. Já que o movimento no plano XY é aqui descrito, a saída do acelerômetro Accx2 e a saída do acelerômetro Accy2 será descrita.
De modo para obter a aceleração Rbxy(O2-X2Y2) convertendo a aceleração Rbxy(O-XY) no ponto B no sistema de coordenada fixa O-XY obtido na acima, nos componentes na direção do eixo X2 e Y2 com a origem 0 com ela é, a conversão de coordenada pode ser efetuada na direção oposta ao ângulo de rotação θcaxy da câmera. Por conseguinte, a seguinte expressão (24) é estabelecida. Saída do acelerômetro:
(primeiro termo: movimento de direção do eixo óptico)
(segundo termo: força centrípeta de revolução)
(terceiro termo: aceleração de revolução)
(quarto termo: força de Coriolis)
(quinto termo: força centrípeta de rotação)
(sexto termo: aceleração de rotação)
(sétimo termo: componente de aceleração de gravidade)(24)
A expressão aproximada é obtida substituindo as condições aproximadas. Condições de restrição são fornecidas tal que a velocidade angular de revolução θaxy e a velocidade angular de rotação 6caxy são de muito pequena vibração (+) em tomo 0 tal que θaxy=0 e θcaxy=0. Adicionalmente, é assumido que o escalar raxy muda muito ligeiramente tal que raxy =valor finito, raxy = valor finito, θbaxy substancialmente satisfaz
Saída do acelerômetro:
(primeiro termo: movimento de direção do eixo óptico)
(segundo termo: força centrípeta de revolução)
(terceiro termo: aceleração de revolução)
(quarto termo: força de Coriolis)
(quinto termo: força centrípeta de rotação)
(sexto termo: aceleração de rotação)
(sétimo termo: componente de aceleração de gravidade)(25)
Esta parte real é a saída do acelerômetro o ACCX2 na direção do eixo X?’ e a Parte imaginária é a saída do acelerômetro Accyi na direção do eixo Va- A representação do sistema de coordenada polar descrita acima é 5 decomposta no componente X2 e o componente Y2 na representação do sistema de coordenada ortogonal. Saída do acelerômetro na direção do eixo X2:
(primeiro termo: movimento de direção do eixo óptico)
(segundo termo: força centrípeta de revolução)
(quinto termo: força centrípeta de rotação)
(sexto termo: aceleração de rotação)
(sétimo termo: componente de aceleração de gravidade) (26)
Na expressão (26), somente o primeiro termo r^, é necessário para correção do movimento de direção do eixo óptico. O segundo termo, o quinto termo, o sexto termo e o sétimo termo são componentes desnecessários para a correção do movimento na direção do eixo óptico, e ao 5 menos que eles sejam apagados, eles se tomam os componentes de erro quando da aceleração rcuy em uma direção do eixo X2 que é o eixo óptico. O segundo, o quinto, o sexto e o sétimo termos podem ser apagados pelo método similar como o caso da próxima expressão (27).
De modo a eliminar o segundo termo (força centrípeta de revolução), os valores de raxy e θaxy que estão incluídos no segundo termo necessita ser obtido. raxy é substancialmente igual ao comprimento focal do lado do objeto (l+β)f/β (β representa uma ampliação de imagem). O aparelho de captura de imagem dos últimos anos é equipado com o codificador de foco que mede a posição de movimento da lente de auto-foco 140. Por 15 conseguinte, é fácil calcular a distância do objeto distância a partir do valor de saída do codificador de foco, no estado em foco.. O resultado raxy é obtido. O valor obtido a partir da próxima expressão (27) é usado como a velocidade angular de revolução θaxy. Saída do acelerômetro na direção do eixo Y2:
(terceiro termo: aceleração de revolução)
(quarto termo: força de Coriolis)
(quinto termo: força centrípeta de rotação)
(sexto termo: aceleração de rotação)
(sétimo termo: componente de aceleração de gravidade) (27)
Os respectivos termos da saída do acelerômetro Accy2(O-X2Y2) na direção do Y2 serão descritos. O terceiro termo jraxyθaxy é o componente necessário para obter a velocidade angular de revolução éaxy desejada a ser obtida na presente modalidade, e a velocidade angular de revolução Ò é obtida dividindo o terceiro termo com o conhecido raxy e integrando o resultado. O quarto termo j2raxyθaxy representa uma força de Coriolis. Se o movimento da câmera na direção do eixo óptico é pequeno, raxy=0 é estabelecido, e o quarto termo pode ser ignorado. O quinto termo e o sexto termo são os componentes de erro que estão incluídos na saída do acelerômetro Accy2(o-x2Y2) já que o acelerômetro 121 não pode ser disposto na posição ideal do ponto principal A e é disposto no ponto B.
O quinto termo
representa a força centrípeta que ocorre já que o acelerômetro 121 gira em torno do ponto principal A. rbaxy e 6baxy são as coordenadas do ponto B no qual o acelerômetro 121 é montado, e são conhecidas. θcaxy representa a velocidade angular de rotação, e é o valor que pode ser medido com o sensor de velocidade angular 130 montado na câmera. Por conseguinte, o valor do quinto termo pode ser calculado.
O sexto termo
representa o componente de aceleração quando o acelerômetro 121 gira em tomo do ponto principal A, e rbaxy e θbaxy são as coordenadas do ponto B no qual o acelerômetro 121 é montado, e são conhecidas. θcaxy pode ser calculado diferenciando do valor do sensor de velocidade angular 130 montado na câmera. Por conseguinte, o valor do sexto termo pode ser calculado.
O sétimo termo
é a influência da aceleração da gravidade, e pode ser tratado como uma constante na expressão aproximada, e, por conseguinte, pode ser apagado pelo processamento de filtragem de um circuito.
Conforme descrito acima, a saída do acelerômetro Accy2(o- X2Y2) na direção do eixo Y2~ inclui componentes desnecessários para velocidade angular de revolução que é θaxy desejado ser obtido na presente invenção. Contudo, se toma claro que dispondo o acelerômetro 121 na posição onde os componentes desnecessários se tomam mínimos, a velocidade angular de revolução θaxy pode ser obtida sem cálculo de correção.
De forma similar, a partir da saída do acelerômetro Accx2(o- X2Y2) na direção de X2, a velocidade de movimento substancialmente na direção do eixo óptico da câmera é desejada ser calculada. O primeiro termo raxy corresponde à aceleração do movimento na direção do eixo óptico. O segundo termo, o quinto termo, o sexto termo e o sétimo termo podem ser apagados pela mesma razão conforme descrito acima com a saída do acelerômetro Accy2(o-x2Y2) na direção do eixo Y2.. Contudo, de forma similar, dispondo o acelerômetro 121 na posição onde os componentes desnecessários se tomam mínimo, a velocidade de movimento raxy substancialmente na direção do eixo óptico da câmera pode ser obtida a partir da saída do ACCX2(O-X2Y2) na direção X2 sem cálculo de correção.
Na modalidade 1, quando a proporção da velocidade angular de revolução para a velocidade angular de rotação é 0,1 ou menos, a velocidade angular de revolução é suficientemente pequeno com relação à velocidade angular de rotação, e, por conseguinte, um cálculo de estabilização de imagem é simplificado efetuando somente correção de movimento de rotação, que conduz ao aprimoramento na velocidade, e redução no consumo de potência.
Adicionalmente, quando exposição de disparo fotográfico é iniciado totalmente pressionando o botão de liberação não ilustrada, a velocidade angular de revolução em tempo real é estimada multiplicando a proporção da velocidade angular de revolução para a velocidade angular de rotação passada por uma velocidade angular de rotação em tempo real. Por meio disso, mesmo se a saída do acelerômetro 121 é perturbada por choque do obturador e vibração da operação da câmera no momento do disparo fotográfico, uso de um valor de aceleração de revolução que é, de forma significativa, errôneo pode ser prevenido, e correção de imagem borrada é permitida.
No sistema óptico de disparo fotográfico da presente modalidade, a proximidade mais próxima é configurada para uma ampliação igual, mas a proximidade mais próxima não é limitada a isto, porque mesmo se a proximidade mais próxima é, por exemplo, duas vezes de acordo com as especificações do sistema óptico de disparo fotográfico ao qual a presente invenção é aplicada, a soma de produtos da função de proporção de erro correspondendo a cada ampliação de imagem do disparo fotográfico é obtida entre a ampliação de imagem do disparo fotográfico de duas vezes para 0,0, e por meio disso, a posição do acelerômetro 121 onde os componentes de erro se tomam mínimos podem ser obtidos. Por conseguinte, é óbvio que o efeito do conteúdo descrito na presente modalidade não muda independente da ampliação de imagem do disparo fotográfico da proximidade mais próxima do sistema óptico de disparo fotográfico.
Adicionalmente, um movimento angular e um movimento paralelo são novamente e estritamente modelados e expressos matematicamente para serem um movimento de rotação e um movimento de revolução, e por meio disso, em qualquer estado que os dois estados do componente de movimento estão, estabilização de imagem apurada sem uma falha de controle pode ser efetuada. Adicionalmente, já que o acelerômetro está disposto na posição onde a quantidade de erro acompanhando a mudança da posição do ponto principal do sistema óptico de disparo fotográfico se toma mínima, e, por conseguinte, estabilização de imagem apurada correspondendo à mudança da posição do ponto principal do sistema óptico de disparo fotográfico pode ser efetuada. Adicionalmente, estabilização de imagem é efetuada com a diferença entre a velocidade angular de rotação e a velocidade angular de revolução, e, por conseguinte, a quantidade de processamento de cálculo após cálculo da diferença pode ser reduzida. Adicionalmente, as unidades do movimento de rotação e o movimento de revolução são as mesmas (por exemplo: rad/s), e por conseguinte, cálculo se toma fácil. Adicionalmente, um movimento de imagem na superfície de captura de imagem do dispositivo de captura de imagem, e a direção do movimento do eixo óptico pode ser representada pela mesma expressão, e, por conseguinte, cálculo de correção de movimento de imagem e cálculo de correção do movimento de direção do eixo óptico podem ser efetuados ao mesmo tempo.
[Modalidade 2]
Usando FIGS. 19A e 19B, modalidade 2 será descrita. Na modalidade 1, a proporção de erro em cada ampliação de imagem do disparo fotográfico é obtida usando expressão (33), e a partir do resultado da soma dos produtos do valor, a posição do acelerômetro 121 onde a proporção de erro se toma a mínima é obtida. Contudo, na presente modalidade, a proporção de erro em cada ampliação de imagem do disparo fotográfico obtida usando expressão (33) é multiplicada por uma frequência de disparo fotográfico para a ponderação.
Conforme descrito na modalidade 1, para a função de proporção de erro em cada ampliação de imagem obtida do disparo fotográfico usando a expressão (33), a frequência de disparo fotográfico em cada ampliação de imagem do disparo fotográfico conhecido como um resultado do estudo sério de um presente requerente é multiplicado. A frequência de disparo fotográfico é ilustrado na Fig. 19A, e o resultado de multiplicar a função de proporção de erro quando o acelerômetro 121 é disposto na ampliação de disparo fotográfico 0 = 0,5 pela frequência de disparo fotográfico é ilustrado na Fig. 19B. FIG. 20 ilustra como o resultado de integrar o valor em cada ampliação de imagem do disparo fotográfico de (proporção de erro) x (frequência de disparo fotográfico) que é obtido conforme mostrado na Fig. 19B muda quando o acelerômetro 121 é disposto em cada ampliação de imagem do disparo fotográfico.
Conforme mostrado na Fig. 20, a proporção de erro se toma mínima quando o acelerômetro 121 é disposto na vizinhança da ampliação de imagem do disparo fotográfico 0 = 0,6 quando comparado com o caso onde o acelerômetro é disposto nas outras ampliações de imagem do disparo fotográfico. Por conseguinte, os componentes de erro incluídos na saída do acelerômetro 121 pode ser minimizado dispondo o acelerômetro 121 na vizinhança da ampliação de imagem do disparo fotográfico 0 = 0,6 do sistema óptico de disparo fotográfico 105, e por conseguinte, o tempo de cálculo de correção da saída do acelerômetro 121 se toma desnecessário. Por meio disso, correção de borra apurada pode ser feita.
Incidentalmente, o caso onde a função de proporção de erro em cada ampliação de imagem do disparo fotográfico obtida usando a expressão (33) é ponderada pela efetiva quantidade de um movimento paralelo em cada ampliação de imagem do disparo fotográfico é considerado. FIG. 21 ilustra como o resultado de integrar o valor em cada ampliação de imagem do disparo fotográfico de (proporção de erro) x (quantidade efetiva de movimento paralelo) muda quando o acelerômetro 121 é disposto em cada ampliação de imagem do disparo fotográfico. Conforme mostrado na Fig. 21, quando o acelerômetro 121 é disposto na vizinhança da ampliação de imagem do disparo fotográfico 0 = 0,8, a proporção de erro se toma mínima quando comparada com o caso onde ele é disposto nas outras ampliações de imagens dos disparos fotográficos. Por conseguinte, os componentes de erro incluídos na saída do acelerômetro 121 podem ser minimizado dispondo o acelerômetro 121 na vizinhança da ampliação de imagem do disparo fotográfico 0 = 0,8 do sistema óptico de disparo fotográfico 105, e por conseguinte, o tempo de cálculo de correção da saída do acelerômetro 121 se toma desnecessário. Por meio disso, correção de borrão apurado pode ser feita.
Conforme descrito acima, ponderando a proporção de erro com a frequência de disparo fotográfico e a efetiva quantidade de um movimento paralelo, o acelerômetro 121 pode ser disposto na posição mínima que é mais adequada para o uso da câmera de um fotógrafo. Não é necessário dizer eu ponderando a proporção de erro com o valor obtido multiplicando a frequência de disparo fotográfico e a quantidade efetiva de um movimento paralelo, o acelerômetro 121 também pode ser disposto na posição onde a proporção de erro é mínima.
[Modalidade 3]
Usando FIGS. 22A e 22B, modalidade 3 será descrita. O mesmo fluxo como nas Figs. 7A e 7B de acordo com a modalidade 1 é incluído. Por conseguinte, os mesmos numerais de referência e caracteres são usados para o mesmo fluxo, e a descrição será omitida.
Após cálculo de velocidade angular de revolução de SI 100 das Figs. 22 A e 22B, o fluxo prossegue para S2610. Em S2610, é determinado se a ampliação de imagem do disparo fotográfico é 0,2 ou mais (predeterminado valor ou mais). No caso de 0,2 ou mais, o fluxo prossegue para S2620, e no caso de menor do que 0,2 (menor do que o predeterminado valor), o fluxo prossegue para SI 130. Em SI 130, cálculo de correção de movimento de rotação é efetuado como na modalidade 1.
Em S2620, é determinado se a velocidade angular de revolução com relação à velocidade angular de rotação está ou não entre -0,9 e +0,9 (predeterminado valor). Se ela está dentro de ±0.9, o fluxo prossegue para SI 120. Quando ela é menor do que -0,9 ou excede +0,9, o fluxo prossegue para S2630.
Em S2630, a proporção de velocidade angular é fixa (armazenada) para a constante (constante especificada) de 0,9, e na próxima S2640, estimativa de uma presente velocidade angular de revolução é calculada multiplicando a velocidade angular de rotação obtida em tempo real pela proporção de velocidade angular constante de 0,9, e o fluxo prossegue para a próxima SI 120. Em SI 120, um cálculo de correção de movimento de diferença de revolução e rotação é efetuado como na modalidade 1.
Na modalidade 3, quando a ampliação de imagem é menor do que 0,2, a velocidade angular de revolução é suficientemente pequena com relação à velocidade angular de rotação, e por conseguinte, um cálculo de estabilização de imagem é simplificado somente efetuando correção de movimento de rotação, que acarreta aprimoramento na velocidade e redução no consumo de potência. Adicionalmente, a proporção da velocidade angular de revolução para a velocidade angular de rotação raramente excede um, e quando a proporção excede ±0,9, correção excessiva errônea é prevenida fixando a proporção para a constante 0,9.
Enquanto a presente invenção foi descrita com referência as modalidades exemplares, é para ser entendido que a invenção não é limitada às modalidades exemplares descritas. O escopo das seguintes reivindicações é estar de acordo com a interpretação mais ampla a fim de abranger todas tais modificações e equivalentes estruturas e funções.
Este pedido reivindica o benefício do Pedido de Patente Japonesa de N° 2009-140255, depositado em 11 de junho de 2009, que é aqui incorporado para referência aqui em sua totalidade.