CN102709221A - 一种平面三自由度晶圆传输装置 - Google Patents
一种平面三自由度晶圆传输装置 Download PDFInfo
- Publication number
- CN102709221A CN102709221A CN2012101920806A CN201210192080A CN102709221A CN 102709221 A CN102709221 A CN 102709221A CN 2012101920806 A CN2012101920806 A CN 2012101920806A CN 201210192080 A CN201210192080 A CN 201210192080A CN 102709221 A CN102709221 A CN 102709221A
- Authority
- CN
- China
- Prior art keywords
- pulley
- shaft
- fixed
- mechanical arm
- solid shaft
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images



Landscapes
- Manipulator (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
Abstract
一种平面三自由度晶圆传输装置,该晶圆传输装置包括基座、三个机械臂、三个电机、六条钢带、十二个带轮、三个传动轴和一个套筒轴。三个电机分别驱动三个机械臂,三个机械臂之间分别具有相对转动自由度。三个电机固定在基座上,通过带传动方式,实现了三个电机对三个机械臂的独立驱动,由三个机械臂的转动进而实现了晶圆传输装置末端的平面三自由度运动。
Description
技术领域
本发明涉及一种平面三自由度晶圆传输装置,主要应用于半导体制造技术领域。
背景技术
在半导体制造过程中,如晶圆的清洗、抛光等,在片盒-片盒、片盒-腔室之间存在对晶圆进行的大量传输,因此设计出一种安全有效的晶圆传输装置是半导体行业研究的热点之一。
现有晶圆传输装置中,主要分为两种,即一种是R-θ型机械手,又称径向直线型,另一种是三关节独立驱动型。R-θ型机械手可以实现平面两个自由度运动,即直线运动和绕中心轴的转动。这种机械手的平面需要两个电机驱动,其中一个电机实现平面驱动,即该电机驱动第一个大臂转动,三个机械臂之间通过关节处的带传动,关节之间传动比为1:-2:1,此时可实现机械手直线运动。采用第二个电机驱动整体结构绕重心轴转动,此时可实现机械手的绕Z轴转动。因此这中机械手只能实现平面两自由度运动,受到操作空间的限制。
三关节独立驱动机械手是在三个关节处分别采用三个直驱电机实现三个机械臂的独立运动,因此可实现平面三自由度运动。但直驱电机位于关节处,增大了机械臂的负载质量,同时容易引起机械臂的变形。
针对以上的不足,有必要设计出能够实现平面三自由度运动且不会增大机械臂负载的一种晶圆传输机械手。
发明内容
本发明的目的在于提供一种能够实现平面三自由度运动的晶圆传输装置。
本发明技术方案如下:
一种平面三自由度晶圆传输装置,其特征在于:该晶圆传输装置包括基座、三个机械臂、三个电机、六条钢带、十二个带轮、三个实心轴和一个套筒轴。
第一实心轴与套筒轴同轴安装,相互之间可以转动;第一实心轴、第二实心轴与第三实心轴轴线相互平行安装;
第一机械臂与第二机械臂分别通过轴承与第二实心轴连接,第二机械臂与第三机械臂分别通过轴承第三实心轴连接;
第一带轮固定在第一电机的输出轴上,第三带轮固定在第二电机的输出轴上,第七带轮固定在第三电机的输出轴上;第四带轮与第五带轮分别固定在第一实心轴的两端,第十带轮与第十一带轮分别固定在第二实心轴的两端,第十二带轮固定在第三实心轴上,第八带轮与第九带轮分别固定在套筒轴的两端;第二带轮固定在第一机械臂的连接部上,第六带轮固定在第二机械臂的连接部上;
通过第一钢带连接第一带轮和第二带轮的运动,通过第二钢带连接第三带轮和第四带轮的运动,通过第三钢带连接第五带轮和第六带轮的运动,通过第四钢带连接第七带轮和第八带轮的运动,通过第五钢带连接第九带轮和第十带轮的运动,通过第六钢带连接第十一带轮和第十二带轮的运动;
第一电机、第二电机和第三电机固定在基座上,分别控制第一机械臂、第二机械臂和第三机械臂的运动。
本发明晶圆传输装置由三个电机分别驱动三个机械臂,且不会增大机械臂负载,实现了平面三自由度运动。
附图说明
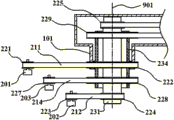
图1是本发明晶圆传输装置主视图。
图2是本发明晶圆传输装置第一实心轴部分局部放大图。
图3是本发明晶圆传输装置第二实心轴部分局部放大图。
图4是本发明晶圆传输装置第三实心轴部分局部放大图。
图中:
100-基座
101-第一机械臂;102-第二机械臂;103-第三机械臂;
201-第一电机;202-第二电机;203-第三电机;
211-第一钢带;212-第二钢带;213-第三钢带;214-第四钢带;215-第五钢带;216-第六钢带;
221-第一带轮;222-第二带轮;223-第三带轮;224-第四带轮;225-第五带轮;226-第六带轮;227-第七带轮;228-第八带轮;229-第九带轮;2210-第十带轮;2211-第十一带轮;2212-第十二带轮;
231-第一实心轴;232-第二实心轴;233-第三实心轴;234-套筒轴;
901-第一轴线;902-第二轴线;903-第三轴线。
具体实施方式
下面结合附图对本发明实施方式作进一步详细描述。
图1、图2、图3和图4是本发明晶圆传输装置的结构图,包括基座100、第一机械臂101、第二机械臂102、第三机械臂103,第一电机201、第二电机202、第三电机203、第一钢带211、第二钢带212、第三钢带213、第四钢带214、第五钢带215、第六钢带216、第一带轮221、第二带轮222、第三带轮223、第四带轮224、第五带轮225、第六带轮226、第七带轮227、第八带轮228、第九带轮229、第十带轮2210、第十一带轮2211、第十二带轮2212、第一实心轴231、第二实心轴232、第三实心轴233和套筒轴234。第一电机201、第二电机202和第三电机203固定在基座100上。
第一实心轴231与套筒轴234同轴安装,相互之间可以转动;第一实心轴231、第二实心轴232与第三实心轴233轴线相互平行安装。
第一机械臂101与第二机械臂102分别通过轴承第二实心轴232连接,第二机械臂102与第三机械臂103分别通过轴承第三实心轴233连接。
第一带轮221固定在第一电机201的输出轴上,第三带轮223固定在第二电机202的输出轴上,第七带轮227固定在第三电机203的输出轴上;第四带轮224与第五带轮225分别固定在第一实心轴231的两端,第十带轮2210与第十一带轮2211分别固定在第二实心轴232的两端,第十二带轮2212固定在第三实心轴233上,第八带轮228与第九带轮229分别固定在套筒轴234的两端;第二带轮222固定在第一机械臂101上,第六带轮226固定在第二机械臂102上。
通过第一钢带211连接第一带轮221和第二带轮222的运动,通过第二钢带212连接第三带轮223和第四带轮224的运动,通过第三钢带213连接第五带轮225和第六带轮226的运动,通过第四钢带214连接第七带轮227和第八带轮228的运动,通过第五钢带215连接第九带轮229和第十带轮2210的运动,通过第六钢带216连接第十一带轮2211和第十二带轮2212的运动。
第一电机201、第二电机202和第三电机203固定在基座100上,分别控制第一机械臂101、第二机械臂102和第三机械臂103的运动。
图2是本发明晶圆传输装置第一实心轴部分局部放大图,第一实心轴231与套筒轴234同轴安装;第一电机201通过第一带轮221、第一钢带211和第二带轮222将动力传递给第一机械臂101,带动第一机械臂101相对于第一实心轴231的旋转运动;第二电机202通过第三带轮223、第二钢带212和第四带轮224将动力传递给第一实心轴231,且动力通过第五带轮225输出;第三电机203通过第七带轮227、第四钢带214和第八带轮228将动力传递给套筒轴234,且动力由第九带轮229输出。
图3是本发明晶圆传输装置第二实心轴部分局部放大图,第一机械臂101与第二机械臂102分别通过轴承第二实心轴232连接;第五带轮225传递的第二电机202驱动力通过第三钢带213、第六带轮226传递至第二机械臂102,带动第二机械臂102相对于第二实心轴232的旋转运动;第九带轮229传递的第三电机203驱动力通过第五钢带215、第十带轮2210传递至第二实心轴232,且动力由第十一带轮2211输出。
图4是本发明晶圆传输装置第三实心轴部分局部放大图,第二机械臂102与第三机械臂103分别通过轴承与第三实心轴233连接;第十一带轮2212传递的第三电机203驱动力通过第六钢带216和第十二带轮2212传递至第三实心轴,带动第三机械臂103相对于第三实心轴103的旋转运动。
Claims (1)
1.一种平面三自由度晶圆传输装置,其特征在于:该晶圆传输装置包括基座(100)、三个机械臂、三个电机、六条钢带、十二个带轮、三个实心轴和一个套筒轴;
第一实心轴(231)与套筒轴(234)同轴安装,相互之间可以转动;第一实心轴(231)、第二实心轴(232)与第三实心轴(233)轴线相互平行安装;
第一机械臂(101)与第二机械臂(102)分别通过轴承与第二实心轴(232)连接,第二机械臂(102)与第三机械臂(103)分别通过轴承与第三实心轴(233)连接;
第一带轮(221)固定在第一电机(201)的输出轴上,第三带轮(223)固定在第二电机(202)的输出轴上,第七带轮(227)固定在第三电机(203)的输出轴上;第四带轮(224)与第五带轮(225)分别固定在第一实心轴(231)的两端,第十带轮(2210)与第十一带轮(2211)分别固定在第二实心轴(232)的两端,第十二带轮(2212)固定在第三实心轴(233)上,第八带轮(228)与第九带轮(229)分别固定在套筒轴(234)的两端;第二带轮(222)固定在第一机械臂(101)上,第六带轮(226)固定在第二机械臂(102)上;第一电机(201)、第二电机(202)和第三电机(203)固定在基座(100)上;
第一带轮(221)和第二带轮(222)通过第一钢带(211)连接,第三带轮(223)和第四带轮(224)通过第二钢带(212)连接,第五带轮(225)和第六带轮(226)通过第三钢带(213)连接,第七带轮(227)和第八带轮(228)通过第四钢带(214)连接,第九带轮(229)和第十带轮(2210)通过第五钢带(215)连接,第十一带轮(2211)和第十二带轮(2212)通过第六钢带(216)连接。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN2012101920806A CN102709221A (zh) | 2011-06-28 | 2012-06-11 | 一种平面三自由度晶圆传输装置 |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201110177870.2 | 2011-06-28 | ||
| CN201110177870 | 2011-06-28 | ||
| CN2012101920806A CN102709221A (zh) | 2011-06-28 | 2012-06-11 | 一种平面三自由度晶圆传输装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN102709221A true CN102709221A (zh) | 2012-10-03 |
Family
ID=46901884
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN2012101920806A Pending CN102709221A (zh) | 2011-06-28 | 2012-06-11 | 一种平面三自由度晶圆传输装置 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN102709221A (zh) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017069920A1 (en) * | 2015-10-23 | 2017-04-27 | Applied Materials, Inc | Robot assemblies, substrate processing apparatus, and methods for transporting substrates in electronic device manufacturing |
| CN115892990A (zh) * | 2022-11-16 | 2023-04-04 | 海目星激光智能装备(江苏)有限公司 | 一种极片转运装置 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20020066330A1 (en) * | 2000-11-17 | 2002-06-06 | Hirotoshi Namba | Double arm substrate transport unit |
| US20060099063A1 (en) * | 2004-06-09 | 2006-05-11 | Pietrantonio Antonio F | Dual scara arm |
| US20100178147A1 (en) * | 2009-01-11 | 2010-07-15 | Applied Materials, Inc. | Robot systems, apparatus and methods for transporting substrates |
-
2012
- 2012-06-11 CN CN2012101920806A patent/CN102709221A/zh active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20020066330A1 (en) * | 2000-11-17 | 2002-06-06 | Hirotoshi Namba | Double arm substrate transport unit |
| US20060099063A1 (en) * | 2004-06-09 | 2006-05-11 | Pietrantonio Antonio F | Dual scara arm |
| US20100178147A1 (en) * | 2009-01-11 | 2010-07-15 | Applied Materials, Inc. | Robot systems, apparatus and methods for transporting substrates |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017069920A1 (en) * | 2015-10-23 | 2017-04-27 | Applied Materials, Inc | Robot assemblies, substrate processing apparatus, and methods for transporting substrates in electronic device manufacturing |
| US9799544B2 (en) | 2015-10-23 | 2017-10-24 | Applied Materials, Inc. | Robot assemblies, substrate processing apparatus, and methods for transporting substrates in electronic device manufacturing |
| CN108028215A (zh) * | 2015-10-23 | 2018-05-11 | 应用材料公司 | 机械手组件、基板处理装置和用于在电子设备制造中传送基板的方法 |
| TWI704038B (zh) * | 2015-10-23 | 2020-09-11 | 美商應用材料股份有限公司 | 用於在進行電子設備製造時輸送基板的機械手組件、基板處理裝置及方法 |
| CN108028215B (zh) * | 2015-10-23 | 2022-07-29 | 应用材料公司 | 机械手组件、基板处理装置和用于在电子设备制造中传送基板的方法 |
| CN115892990A (zh) * | 2022-11-16 | 2023-04-04 | 海目星激光智能装备(江苏)有限公司 | 一种极片转运装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8234949B2 (en) | Power transmission mechanism and robot arm using the same | |
| CN201808063U (zh) | 六自由度并联机器人装置 | |
| US8511198B2 (en) | Robot arm system | |
| US8511197B2 (en) | Robot arm assembly | |
| CN102615652B (zh) | 基于双电磁离合器的二自由度机器人关节 | |
| CN109760029B (zh) | 基于同步带轮传动的扁平型单臂机器人 | |
| CN202049666U (zh) | 一种机器人臂部传动结构的教学仪 | |
| CN118876108B (zh) | 一种绳驱三自由度混联球形腕部关节 | |
| CN104626113A (zh) | 一种连杆-同步带联合传动的四自由度机器人 | |
| CN103481283A (zh) | 一种3轴五杆并联机械手 | |
| CN102554914A (zh) | 一种新型三自由度欠驱动机构 | |
| CN105041993A (zh) | 一种scara工业机器人用减速装置 | |
| CN107717959A (zh) | 一种部分解耦的scara高速并联机械手 | |
| CN103802090A (zh) | 一种双臂搬运机械手 | |
| CN103264399A (zh) | 机器人腰臂一体化同步双驱机构及其控制方法 | |
| CN102709221A (zh) | 一种平面三自由度晶圆传输装置 | |
| CN110561489B (zh) | 一种三自由度并联驱动关节 | |
| CN104690713B (zh) | 一种四自由度并联分拣机器人 | |
| CN204748650U (zh) | 一种机器人关节结构 | |
| CN106863264B (zh) | 一种四自由度并联机器人动平台 | |
| CN108167394B (zh) | 一种旋转底座及圆柱坐标系机器人 | |
| CN202622818U (zh) | 基于双电磁离合器的二自由度机器人关节装置 | |
| CN204784506U (zh) | 一种scara工业机器人用减速装置 | |
| CN102615642B (zh) | 可实现五坐标加工能力的并联机械手 | |
| CN218953949U (zh) | 一种丝杆组件和机器人 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C02 | Deemed withdrawal of patent application after publication (patent law 2001) | ||
| WD01 | Invention patent application deemed withdrawn after publication |
Application publication date: 20121003 |