Disclosure of Invention
The present invention is directed to solving, at least to some extent, one of the above-mentioned problems in the related art. Therefore, the invention provides an intelligent sickbed unit management system and method.
The technical scheme adopted by the invention for solving the technical problems is as follows:
an intelligent sickbed unit management system comprises an alarm button arranged at the head of a sickbed and a first gravity sensor arranged in a sickroom storage cabinet, wherein an infrared sensing device is further arranged at the bottom of the sickbed, and sickbeds in all sickrooms are sequentially numbered and recorded into a central computer database;
the intelligent storage device robot is characterized by further comprising an intelligent storage device robot, a robot body of the intelligent storage device robot is of a storage box structure, a second gravity sensor is arranged at the bottom of the storage box structure, a mechanical arm is arranged on one side of the edge of the storage box structure, a disinfecting water spraying device is arranged on the other side of the edge of the storage box structure, the lower side of the storage box structure is connected with a crawler through a transmission device, the crawler is provided with a brake device, a dust collection device is further arranged at the bottom of the crawler, and the intelligent storage device robot is further provided with a storage module, a control module, a wireless module and a radar module;
the alarm button, the first gravity sensor, the infrared sensing device and the wireless module are all in communication connection with the central computer.
Further, the wireless module is a GPRS module.
Further, the brake device is a brake pad.
Further, the radar module adopts a laser positioning device.
Further, laser positioner including set up in the laser emission device of intelligence storing device robot front end and encircle a set of laser receiving arrangement that laser emission device set up.
Further, the storage module stores a fixed path corresponding to the hospital bed number.
The invention also provides a management method of the intelligent sickbed unit, which comprises the following steps:
s1, firstly, judging the management requirement of the sickbed unit:
s11, pressing down a bed head alarm button of the sickbed when the patient is discharged, and judging that the sickbed has a sickbed unit management requirement at the moment;
s12, if the patient forgets to press the button, determining that the sickbed is required to be managed if the indication number of the first gravity sensor of the storage cabinet is lower than a first weight threshold value and the infrared sensing device of the sickbed displays no human body infrared information in one hour;
s2, the central computer sends a selection instruction to the robots through the wireless module, and randomly selects one of the robots marked as available to be driven to the patient bed corresponding to the management requirement of the patient bed unit according to a set path;
s3, when the robot acts, the laser emitting device emits laser and the laser is received by the ultrasonic receiving device after being reflected, then the robot control device calculates the propagation distance S according to the time difference T between the emission of the laser and the receiving of the return light and the propagation speed V of the laser, when the calculated distance is higher than the dangerous distance threshold value, the control module emits a braking instruction, and after the braking device receives the braking instruction, the braking device brakes;
s4, after the robot reaches a specified bed, the control module sends out an instruction to the dust collection device to remove dust, and the disinfectant water spraying device extrudes to disinfect, and then standard bedding and clothing changing operation is carried out;
s5, after the readings of the second gravity sensor are lower than a second weight threshold value and the actions of dust removal by the dust collection device, disinfection by extrusion of the disinfectant spraying device and standard clothes changing operation are finished, the control module sends out an instruction to instruct the robot to return according to a set path and brake and avoid obstacles in an S3 mode;
s6, after returning to the standby point, the staff cleans the robot dust collector and fills the sterilized water,
the robot then informs the central computer through the communication module, and the central computer then marks the robot as available in steps S3 to S5.
The invention has the beneficial effects that: the hospital bed unit replacement management is carried out in real time through the robot, the wells are regular, the manual treatment cost for hospital bed unit replacement is saved, the efficiency is high, and the requirements of modern hospital scientific management are met.
Detailed Description
Referring to fig. 1, the intelligent sickbed unit management system comprises an alarm button arranged at the head of a sickbed and a first gravity sensor arranged in a sickroom storage cabinet, wherein an infrared sensing device is arranged at the bottom of the sickbed, and the sickbeds in all the sickrooms are sequentially numbered and recorded into a central computer database;
let new patient can call the robot at any time through alarm button and carry out sick bed unit and handle or just carry out corresponding sick bed unit and handle when the patient that is discharged from hospital leaves to use first weight sensor and the dual detection of infrared induction system to ensure that patient leaves the back automatic call robot and carry out sick bed unit and handle, simple, convenient, high-efficient.
The intelligent storage device robot is characterized by further comprising an intelligent storage device robot, a robot body of the intelligent storage device robot is a storage box structure 1, a second gravity sensor 2 is arranged at the bottom of the storage box structure 1, a mechanical arm 3 is arranged on one side of the edge of the storage box structure 1, a disinfection water spraying device 4 is arranged on the other side of the edge of the storage box structure 1, the lower portion of the storage box structure is connected with a crawler 5 through a transmission device, the crawler is provided with a brake device, a dust collection device is further arranged at the bottom of the crawler, and the intelligent storage device robot is further provided with a storage module, a control module, a wireless module and a radar module;
the alarm button, the first gravity sensor, the infrared sensing device and the wireless module are all in communication connection with the central computer.
In the embodiment, the wireless module adopts the GPRS module, so that the relatively low connection cost and the resource utilization rate are high in a GSM network, and the GPRS firstly introduces a packet switching transmission mode, so that the original GSM data transmission mode adopting a circuit switching mode is fundamentally changed, which is particularly important under the condition of scarce wireless resources. In circuit-switched mode, the user will have the radio channel on their own, whether or not data is being transmitted, throughout the connection. During a session, many applications tend to have substantial idle periods, such as Internet browsing, sending and receiving E-mail, etc., as described above. For packet switched mode, the user occupies resources only during the transmission or reception of data, which means that multiple users can efficiently share the same radio channel, thereby improving the utilization of resources. The charging of the GPRS user is mainly based on the data volume of communication, and the principle of 'obtaining and paying' is embodied. In practice, GPRS users may have connection times as long as several hours, but only a relatively low connection cost.
GPRS can provide transmission rates up to 115kbps (with a maximum of 171.2kbps, excluding FEC). This means that within a few years, GPRS users can browse on the internet as fast as ISDN users via laptops, while also making possible some mobile multimedia applications that are sensitive to transmission rates.
Access time short packet switched access time is reduced to less than 1 and GPRS is a new GSM data service that provides mobile users with wireless packet data access shares.
This embodiment brake equipment adopts the brake block, uses the brake block, and simple structure is efficient.
This embodiment radar module adopts laser positioner, and chooses for use aTINY little laser locator for use, laser positioner including set up in the laser emission device of intelligence storing device robot front end and encircle a set of laser receiving device that laser emission device set up.
When the device works, laser is emitted outwards through the rotating mirror surface mechanism, when a cooperative road sign formed by a retro-reflector is scanned, reflected light is processed by the photoelectric receiving device to serve as a detection signal, a data acquisition program is started to read code disc data (a target measurement angle value) of the rotating mechanism, then the code disc data is transmitted to an upper computer through communication to be processed, and the current position and direction of the sensor under a road sign coordinate system can be calculated according to the known position and detected information of the road sign, so that the aim of further navigation and positioning is fulfilled.
Laser ranging has the advantages of narrow light beam, good parallelism, small scattering, high resolution in the ranging direction and the like.
The infrared luminotron emits modulated signals, the infrared sensitive tube receives infrared modulation signals reflected by a target object, and the elimination of the interference of the environmental infrared light is ensured by signal modulation and a special infrared filter. Assuming that the output signal Vo represents the voltage output of the reflected light intensity, Vo is a function of the probe-to-workpiece distance:
where, p is the workpiece reflection coefficient. p is related to the surface color and roughness of the target. X is the distance between the probe and the workpiece. When the workpieces are the same kind of target objects with consistent p values, x corresponds to Vo one to one. x can be obtained by interpolating the proximity measurement experimental data of various targets. Therefore, the position of the robot from the target object can be measured through the infrared sensor, and the mobile robot can be navigated and positioned through other information processing methods.
Although infrared sensing positioning also has the advantages of high sensitivity, simple structure, low cost and the like, because the angular resolution is high and the distance resolution is low, the infrared sensing positioning is commonly used as a proximity sensor in a mobile robot to detect approaching or sudden movement obstacles, so that the robot can stop obstacles urgently.
The storage module stores a fixed path corresponding to the sickbed number, and the ROS robot system is used for setting the path of the robot and setting navigation target points, namely the beds. And storing a robot mechanical arm motion code, an automatic dust collector starting code and an automatic disinfectant spraying code in the storage module, and executing the operation by the control module.
Setting the empty weight of the first gravity sensor to Mkg, M +0.1kg is the first weight threshold M1, and setting the empty weight of the second gravity sensor to Nkg, N +0.1kg is the second weight threshold N1
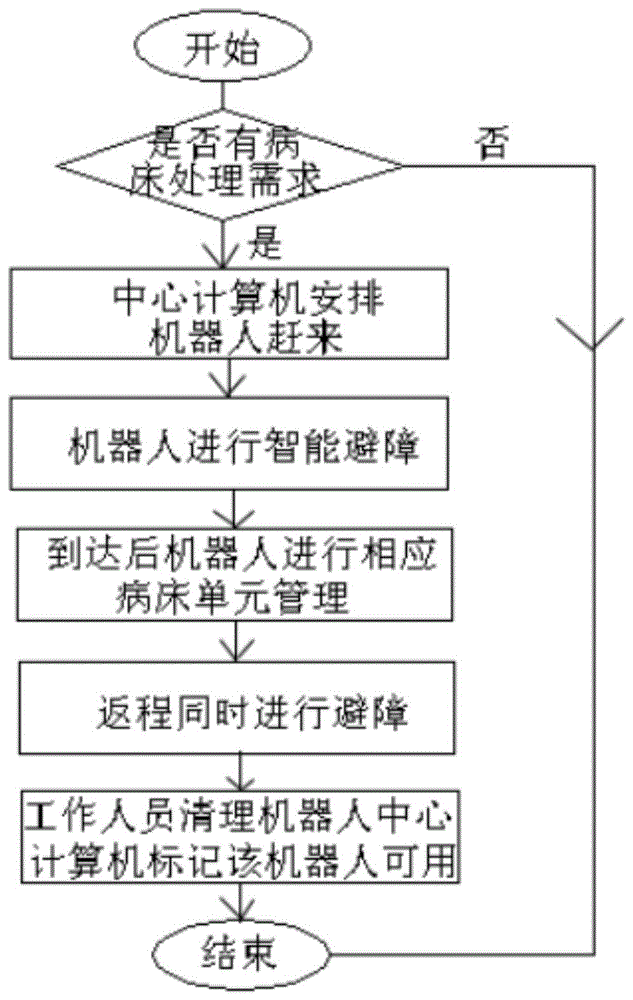
The invention also provides an intelligent sickbed unit management method in combination with the fig. 2, which comprises the following steps:
s1, firstly, judging the management requirement of the sickbed unit:
s11, pressing down a bed head alarm button of the sickbed when the patient is discharged, and judging that the sickbed has a sickbed unit management requirement at the moment;
s12, if the patient forgets to press the button, if the indication number of the first gravity sensor of the storage cabinet is lower than a first weight threshold M1 in one hour and the infrared sensing device of the sickbed displays no human body infrared information, the patient is judged to have a sickbed unit management requirement, the infrared sensing device is placed in the center of the lower part of the sickbed, the sensing distance is set to be 2.5 meters, and the patient unit is ensured to be covered;
s2, the central computer sends a selection instruction to the robots through the wireless module, and randomly selects one of the robots marked as available to be driven to the patient bed corresponding to the management requirement of the patient bed unit according to a set path;
s3, when the robot acts, the laser emitting device emits laser and the laser is received by the ultrasonic receiving device after being reflected, then the robot control device calculates the propagation distance S according to the laser positioning device, when the calculated distance S is higher than a dangerous distance threshold value, wherein the dangerous distance threshold value can be manually set within the range of 0.5-3 meters, in the embodiment, 1.5 meters, the control module emits a braking instruction, and the braking device brakes after receiving the braking instruction;
s4, after the robot reaches a specified bed, the control module sends out an instruction to the dust collection device to remove dust, the disinfectant spraying device extrudes to disinfect, and then standard clothes changing operation is carried out;
s5, the readings of the second gravity sensor are lower than a second weight threshold value N1, the second threshold value N1 is the readings of the weight of the clothes, after the dust collection device is operated to remove dust, the disinfectant spraying device is extruded to sterilize, and then the standard clothes changing operation is carried out, the control module sends out an instruction to instruct the robot to return according to a set path, and meanwhile, the robot is braked and obstacle avoidance is carried out according to the S3 mode;
s6, after returning to the standby point, the staff cleans the robot dust collector and loads the sterilized water, then the robot informs the central computer through the communication module, and then the central computer marks the robot in the steps S3 to S5 as a usable state.
While the invention has been described with reference to a preferred embodiment, it will be understood by those skilled in the art that various changes in form and details may be made therein without departing from the spirit and scope of the invention as defined by the appended claims.