CN112192575B - 一种相邻关节空间轨迹过渡方法及装置 - Google Patents
一种相邻关节空间轨迹过渡方法及装置 Download PDFInfo
- Publication number
- CN112192575B CN112192575B CN202011142106.7A CN202011142106A CN112192575B CN 112192575 B CN112192575 B CN 112192575B CN 202011142106 A CN202011142106 A CN 202011142106A CN 112192575 B CN112192575 B CN 112192575B
- Authority
- CN
- China
- Prior art keywords
- ptp
- speed
- current
- joint
- deta
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1656—Program controls characterised by programming, planning systems for manipulators
- B25J9/1664—Program controls characterised by programming, planning systems for manipulators characterised by motion, path, trajectory planning
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1602—Program controls characterised by the control system, structure, architecture
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Automation & Control Theory (AREA)
- Manipulator (AREA)
- Numerical Control (AREA)
Abstract
本发明公开了一种相邻关节空间轨迹过渡方法及装置,所述方法包括:对各轴在相邻空间内进行时间同步,使多轴同步时间到达每一个位置;将当前段轨迹的末速度作为对下一段轨迹的初速度,当前段轨迹的初速度作为上一段轨迹的末速度,进行轨迹规划,使相邻空间速度平滑过渡;根据轨迹规划的输出数据,进行插补运算,以使轨迹连续;本发明的优点在于:在每个中间过程点速度平滑,减少不必要的启停,减少时间成本和能耗成本。
Description
技术领域
本发明涉及机器人运动控制领域,更具体涉及一种相邻关节空间轨迹过渡方法及装置。
背景技术
机械臂运动空间分为关节空间和笛卡尔空间,当前工业机械臂在单独关节空间和笛卡尔空间运动已经十分容易实现。关节空间和笛卡尔空间的混合空间过渡的主要方法是将关节空间通过正向运动学转到笛卡尔空间,再将笛卡尔空间与笛卡尔空间指令做轨迹过渡,比如在交点处做降速为零的处理。对于通用机器人的关节空间规划,也就是PTP,每个关节从起始点位到终止点位,往往是单独规划运动,各个关节能在同一时间启动,能到达指定点位。这样简单的关节运动对于运动过程控制要求不高,并且有快速定位要求的作业是适用的。但对于连续关节空间规划运动,如果采用各关节独立运动,会出现各关节从运动起始点,到中间点,最后到目标点,速度从0加速,再到0,再加速,在到0,这种连续启停运动,可以发现每出现一个中间点,各关节就要启停一次。这样会造成运动过程不可控,各关节无法同步到中间点位置,也就是无法实现避开固定点障碍物功能,效率会大大降低,增加了时间成本和能耗成本,不适合实际作业的要求。
发明内容
本发明所要解决的技术问题在于现有技术相邻关节空间轨迹过渡方法时间成本和能耗成本高的问题。
本发明通过以下技术手段实现解决上述技术问题的:一种相邻关节空间轨迹过渡方法,所述方法包括:
步骤一:对各轴在相邻空间内进行时间同步,使多轴同步时间到达每一个位置;
步骤二:将当前段轨迹的末速度作为对下一段轨迹的初速度,当前段轨迹的初速度作为上一段轨迹的末速度,进行轨迹规划,使相邻空间速度平滑过渡;对于连续多段关节空间轨迹过渡,判断当前关节空间与下一段关节空间的位移,当位移方向相同且当前关节空间的位移大于下一段关节空间的位移时,当前关节空间关节末速度取相邻两段关节空间运动段运行速度的最小值为当前关节末速度;如果当前关节空间的位移小于下一段关节空间的位移时,当前关节空间关节末速度取相邻两段关节空间运动段运行速度的最大值作为当前关节末速度;
步骤三:根据轨迹规划的输出数据,进行插补运算,以使轨迹连续;其中,输出数据包括初速度、末速度以及位置。
本发明通过对各轴在相邻空间内进行时间同步,使多轴同步时间到达每一个准确位置,避免出现各轴从运动起始点,到中间点,最后到目标点,速度从0加速,再到0,再加速,在到0,这种连续启停运动,同时,将当前段轨迹的末速度作为对下一段轨迹的初速度,当前段轨迹的初速度作为上一段轨迹的末速度,各轴在两段轨迹运动交点处速度平滑连接过渡,在每个中间过程点速度平滑,减少不必要的启停,减少时间成本和能耗成本。
优选的,所述步骤一包括:各轴首先根据输入信息,参数自适应S速度规划,计算出每个轴的单段PTP运行时间,然后将各轴中最大的运行时间作为基准时间,其他各轴做基于基准时间的S速度规划,实现单段PTP各轴的时间同步。
优选的,所述步骤二包括:对于单段PTP,设置单段PTP的初始速度和末速度即可完成轨迹规划,对于连续多段PTP,将当前段PTP的末速度与下一段PTP的初速度平滑过渡。
优选的,所述步骤二还包括:对于连续多段PTP,将当前段PTP的末速度与下一段PTP的初速度平滑过渡包括:判断当前段PTP的位移deta_x1和下一段PTP的位移deta_x2;
在当前段PTP的位移deta_x1和下一段PTP的位移deta_x2方向相同的情况下,当deta_x1>=deta_x2时,当前PTP关节末速度取相邻两段PTP运动段运行速度的最小值为当前关节末速度;如果deta_x1<deta_x2,当前PTP关节末速度取相邻两段PTP运动段运行速度的最大值作为当前关节末速度;
在当前段PTP的位移deta_x1和下一段PTP的位移deta_x2方向相反的情况下,直接将当前关节末速度设置为0,然后把当前段PTP的末速度作为下一段PTP的初速度,完成速度平滑过渡。
本发明还提供一种相邻关节空间轨迹过渡装置,所述装置包括:
时间同步模块,用于对各轴在相邻空间内进行时间同步,使多轴同步时间到达每一个位置;
轨迹规划模块,用于将当前段轨迹的末速度作为对下一段轨迹的初速度,当前段轨迹的初速度作为上一段轨迹的末速度,进行轨迹规划,使相邻空间速度平滑过渡;对于连续多段关节空间轨迹过渡,判断当前关节空间与下一段关节空间的位移,当位移方向相同且当前关节空间的位移大于下一段关节空间的位移时,当前关节空间关节末速度取相邻两段关节空间运动段运行速度的最小值为当前关节末速度;如果当前关节空间的位移小于下一段关节空间的位移时,当前关节空间关节末速度取相邻两段关节空间运动段运行速度的最大值作为当前关节末速度;
插补运算模块,用于根据轨迹规划的输出数据,进行插补运算,以使轨迹连续;其中,输出数据包括初速度、末速度以及位置。
优选的,所述时间同步模块还用于:各轴首先根据输入信息,参数自适应S速度规划,计算出每个轴的单段PTP运行时间,然后将各轴中最大的运行时间作为基准时间,其他各轴做基于基准时间的S速度规划,实现单段PTP各轴的时间同步。
优选的,所述轨迹规划模块还用于:对于单段PTP,设置单段PTP的初始速度和末速度即可完成轨迹规划,对于连续多段PTP,将当前段PTP的末速度与下一段PTP的初速度平滑过渡;
优选的,所述轨迹规划模块还用于:对于连续多段PTP,将当前段PTP的末速度与下一段PTP的初速度平滑过渡包括:判断当前段PTP的位移deta_x1和下一段PTP的位移deta_x2;
在当前段PTP的位移deta_x1和下一段PTP的位移deta_x2方向相同的情况下,当deta_x1>=deta_x2时,当前PTP关节末速度取相邻两段PTP运动段运行速度的最小值为当前关节末速度;如果deta_x1<deta_x2,当前PTP关节末速度取相邻两段PTP运动段运行速度的最大值作为当前关节末速度;
在当前段PTP的位移deta_x1和下一段PTP的位移deta_x2方向相反的情况下,直接将当前关节末速度设置为0,然后把当前段PTP的末速度作为下一段PTP的初速度,完成速度平滑过渡。
本发明的优点在于:本发明通过对各轴在相邻空间内进行时间同步,使多轴同步时间到达每一个准确位置,避免出现各轴从运动起始点,到中间点,最后到目标点,速度从0加速,再到0,再加速,在到0,这种连续启停运动,同时,将当前段轨迹的末速度作为对下一段轨迹的初速度,当前段轨迹的初速度作为上一段轨迹的末速度,各轴在两段轨迹运动交点处速度平滑连接过渡,在每个中间过程点速度平滑,减少不必要的启停,减少时间成本和能耗成本。
附图说明
图1为本发明实施例所公开的一种相邻关节空间轨迹过渡方法的流程图;
图2为本发明实施例所公开的一种相邻关节空间轨迹过渡方法中的算法流程图;
图3为本发明实施例所公开的一种相邻关节空间轨迹过渡方法中关节空间过度示意图;
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例1
如图1所示,一种相邻关节空间轨迹过渡方法,相邻关节空间轨迹过渡主要是前一条关节指令的末速度作为下条关节空间指令的初速度,同时每一条关节空间指令各个运动轴做时间同步。所述方法包括:
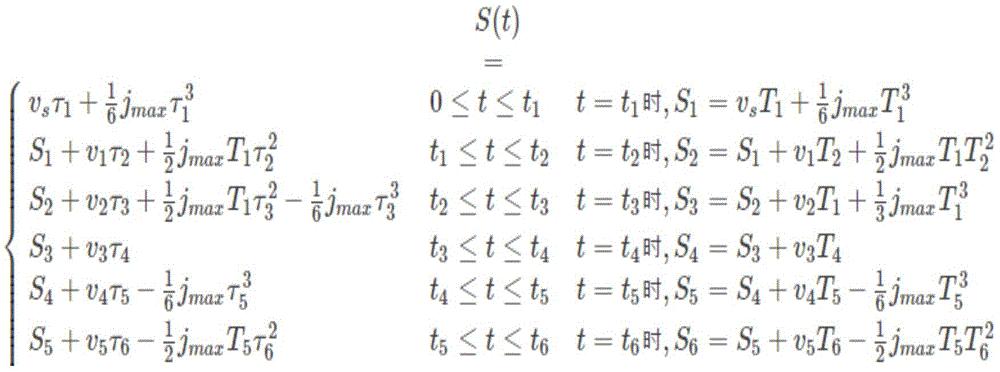
步骤S1:对各轴在相邻空间内进行时间同步,使多轴同步时间到达每一个位置。各轴首先根据输入信息,参数自适应S速度规划,计算出每个轴的单段PTP运行时间,然后将各轴中最大的运行时间作为基准时间,其他各轴做基于基准时间的S速度规划,实现单段PTP各轴的时间同步;其中,参数自适应S速度规划属于现有技术,主要过程为首先根据根据用户输入的位置由逆动学关系求出各个轴的角位移S,J为加加速度,a为加速度,v为速度;由以下公式可以求出对应位移、速度及加速度下的总时间
tk(k=0,1,...7):表示各个阶段的过渡点时刻;
Tk(k=0,1,...7):局部时间坐标,表示以各个阶段的起始点作为时间零点的时间表示
Tk=tk-tk-1(k=0,1,...7):
Tk(k=1,...7):各个阶段的持续运行时间。



步骤S2:将当前段轨迹的末速度作为对下一段轨迹的初速度,当前段轨迹的初速度作为上一段轨迹的末速度,进行轨迹规划,使相邻空间速度平滑过渡;对于连续多段关节空间轨迹过渡,判断当前关节空间与下一段关节空间的位移,当位移方向相同且当前关节空间的位移大于下一段关节空间的位移时,当前关节空间关节末速度取相邻两段关节空间运动段运行速度的最小值为当前关节末速度;如果当前关节空间的位移小于下一段关节空间的位移时,当前关节空间关节末速度取相邻两段关节空间运动段运行速度的最大值作为当前关节末速度。对于单段PTP,设置单段PTP的初始速度和末速度即可完成轨迹规划,对于连续多段PTP,将当前段PTP的末速度与下一段PTP的初速度平滑过渡;此部分属于预规划运动,这样处理的优点在于,预规划运动部能在极短的时间内,规划出单段PTP的所有信息。同时系统能够根据这些信息判断出用户设置数据是否合理,不合理会给用户返回提示修改输入信息,这样避免了直接运动存在的不可预测风险和路径规划失败无法获取失败原因的数据。
步骤S3:根据轨迹规划的输出数据,进行插补运算,以使轨迹连续;其中,输出数据包括初速度、末速度以及位置。具体过程为:根据以上输出数据,进行插补运算,以使轨迹连续。根据上一部分的成功预规划的数据,直接进行插补运动,优点在于插补运动时不需要再次对用户数据进行处理,极大的节省了时间,同时规划原理是与插补原理一致,所以规划成功的数据,插补运动一定可达。需要说明的是,预规划只是规划了初速度、末速度,对于初始点与终点之间是没有点的,所以进行插补运算,使得轨迹连续,同时插补运算属于现有算法,在此不做赘述。
如图2和图3所示,参数自适应S速度规划之前还包括提取输入的各个示教点到关节位置数组,位置数组最后一个元素赋值为0,运算需求没有意义;提取各个示教指令指定的运行速度到速度数组,速度数组最后一个元素赋值为0,运算需求,没有意义;提取各段设定的最大加速度和加加速度;每一段的终点处的速度,初设为取相邻两端速度的值的小值;根据每段的起始位置和终点位置以及位置的正负,来计算参数类型标志,进行平移和对称预变换,变换为起点位置为0,终点位置为正数,变换为增加的正数后,S速度规划库可以接收;各个关节速度规划参数预变换之后,接下来的过程可以总结为,对各个关节进行基于指定速度的S速度规划,得到每轴该段耗时时间。以耗时最久的关节为基准轴,最久的时间为基准时间;基准轴插值类型为基于指定速度的S速度规划,其余各轴插值类型为基于指定时间的S速度规划。各轴速度预规划;得到S速度规划修正后的该段末速度,作为下一段开始的初速度。每个关节按照插值类型进行相应的插值。按照参数类型标志进行参数回归变换,得到插补后的位置,速度,加速度信息。
对于单段PTP,仅需要设初始速度,末速度即可。但是连续多段PTP时,为了在交点处速度平滑,当前段PTP的末速度要与下一段PTP的初速度平滑过渡,也就是速度大小和方向相同。根据速度规划,需要输入每段PTP的末速度。所述对于连续多段PTP,判断当前段PTP的位移deta_x1和下一段PTP的位移deta_x2,如果位移方向相同,则当deta_x1>=deta_x2时,当前PTP关节末速度取相邻两段PTP运动段运行速度的最小值为当前关节末速度;如果deta_x1<deta_x2,则当前PTP关节末速度取相邻两段PTP运动段运行速度的最大值作为当前关节末速度;如果位移反向时,直接将当前关节末速度设置为0,然后把当前段PTP的末速度作为下一段PTP的初速度,完成速度平滑过渡。如果出现多段PTP连续,只需要计算相邻两段的关节末速度和关节初速度就可以,与其他PTP段和数据无关。当deta_x1或者deta_x2出现0时,也就是某些关节没有移动,但是期望关节有初末速度,其他关节正常进行了转动,兼容这种情况,直接比较位移大小,进行相应的处理即可,不需要区分位移方向是否相同。
通过以上技术方案,本发明提供一种相邻关节空间轨迹过渡方法,通过对各轴在相邻空间内进行时间同步,使多轴同步时间到达每一个准确位置,避免出现各轴从运动起始点,到中间点,最后到目标点,速度从0加速,再到0,再加速,在到0,这种连续启停运动,同时,将当前段轨迹的末速度作为对下一段轨迹的初速度,当前段轨迹的初速度作为上一段轨迹的末速度,各轴在两段轨迹运动交点处速度平滑连接过渡,在每个中间过程点速度平滑,减少不必要的启停,减少时间成本和能耗成本。
实施例2
与本发明实施例1相对应的,本发明实施例2还提供本发明还提供一种相邻关节空间轨迹过渡装置,所述装置包括:
时间同步模块,用于对各轴在相邻空间内进行时间同步,使多轴同步时间到达每一个位置;
轨迹规划模块,用于将当前段轨迹的末速度作为对下一段轨迹的初速度,当前段轨迹的初速度作为上一段轨迹的末速度,进行轨迹规划,使相邻空间速度平滑过渡;对于连续多段关节空间轨迹过渡,判断当前关节空间与下一段关节空间的位移,当位移方向相同且当前关节空间的位移大于下一段关节空间的位移时,当前关节空间关节末速度取相邻两段关节空间运动段运行速度的最小值为当前关节末速度;如果当前关节空间的位移小于下一段关节空间的位移时,当前关节空间关节末速度取相邻两段关节空间运动段运行速度的最大值作为当前关节末速度;
插补运算模块,用于根据轨迹规划的输出数据,进行插补运算,以使轨迹连续;其中,输出数据包括初速度、末速度以及位置。
具体的,所述时间同步模块还用于:各轴首先根据输入信息,参数自适应S速度规划,计算出每个轴的单段PTP运行时间,然后将各轴中最大的运行时间作为基准时间,其他各轴做基于基准时间的S速度规划,实现单段PTP各轴的时间同步。
具体的,所述轨迹规划模块还用于:对于单段PTP,设置单段PTP的初始速度和末速度即可完成轨迹规划,对于连续多段PTP,将当前段PTP的末速度与下一段PTP的初速度平滑过渡;
具体的,所述轨迹规划模块还用于:对于连续多段PTP,将当前段PTP的末速度与下一段PTP的初速度平滑过渡包括:判断当前段PTP的位移deta_x1和下一段PTP的位移deta_x2;
在当前段PTP的位移deta_x1和下一段PTP的位移deta_x2方向相同的情况下,当deta_x1>=deta_x2时,当前PTP关节末速度取相邻两段PTP运动段运行速度的最小值为当前关节末速度;如果deta_x1<deta_x2,当前PTP关节末速度取相邻两段PTP运动段运行速度的最大值作为当前关节末速度;
在当前段PTP的位移deta_x1和下一段PTP的位移deta_x2方向相反的情况下,直接将当前关节末速度设置为0,然后把当前段PTP的末速度作为下一段PTP的初速度,完成速度平滑过渡。
以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
Claims (4)
1.一种相邻关节空间轨迹过渡方法,其特征在于,所述方法包括:
步骤一:根据每段运动的起始位置和终点位置以及位置的正负,来计算参数类型标志,进行平移和对称预变换,变换为起点位置为0,终点位置为正数,各个关节速度规划参数预变换之后,对各个关节进行基于指定速度的S速度规划,得到每轴该段耗时时间,以耗时最久的关节为基准轴,最久的时间为基准时间;基准轴插值类型为基于指定速度的S速度规划,其余各轴插值类型为基于指定时间的S速度规划,最后按照参数类型标志进行参数回归变换,对各轴在相邻空间内进行时间同步,使多轴同步时间到达每一个位置;
步骤二:将当前段轨迹的末速度作为对下一段轨迹的初速度,当前段轨迹的初速度作为上一段轨迹的末速度,进行轨迹规划,使相邻空间速度平滑过渡;对于连续多段关节空间轨迹过渡,判断当前关节空间与下一段关节空间的位移,当位移方向相同且当前关节空间的位移大于下一段关节空间的位移时,当前关节空间关节末速度取相邻两段关节空间运动段运行速度的最小值为当前关节末速度;如果当前关节空间的位移小于下一段关节空间的位移时,当前关节空间关节末速度取相邻两段关节空间运动段运行速度的最大值作为当前关节末速度;具体为:
对于单段PTP,设置单段PTP的初始速度和末速度即可完成轨迹规划,对于连续多段PTP,将当前段PTP的末速度与下一段PTP的初速度平滑过渡;
对于连续多段PTP,将当前段PTP的末速度与下一段PTP的初速度平滑过渡包括:判断当前段PTP的位移deta_x1和下一段PTP的位移deta_x2;
在当前段PTP的位移deta_x1和下一段PTP的位移deta_x2方向相同的情况下,当deta_x1>=deta_x2时,当前PTP关节末速度取相邻两段PTP运动段运行速度的最小值为当前关节末速度;如果deta_x1<deta_x2,当前PTP关节末速度取相邻两段PTP运动段运行速度的最大值作为当前关节末速度;
在当前段PTP的位移deta_x1和下一段PTP的位移deta_x2方向相反的情况下,直接将当前关节末速度设置为0,然后把当前段PTP的末速度作为下一段PTP的初速度,完成速度平滑过渡;
步骤三:根据轨迹规划的输出数据,进行插补运算,以使轨迹连续;其中,输出数据包括初速度、末速度以及位置。
2.根据权利要求1所述的一种相邻关节空间轨迹过渡方法,其特征在于,所述步骤一包括:各轴首先根据输入信息,参数自适应S速度规划,计算出每个轴的单段PTP运行时间,然后将各轴中最大的运行时间作为基准时间,其他各轴做基于基准时间的S速度规划,实现单段PTP各轴的时间同步。
3.一种相邻关节空间轨迹过渡装置,其特征在于,所述装置包括:
时间同步模块,用于对各轴在相邻空间内进行时间同步,使多轴同步时间到达每一个位置;
轨迹规划模块,用于将当前段轨迹的末速度作为对下一段轨迹的初速度,当前段轨迹的初速度作为上一段轨迹的末速度,进行轨迹规划,使相邻空间速度平滑过渡;对于连续多段关节空间轨迹过渡,判断当前关节空间与下一段关节空间的位移,当位移方向相同且当前关节空间的位移大于下一段关节空间的位移时,当前关节空间关节末速度取相邻两段关节空间运动段运行速度的最小值为当前关节末速度;如果当前关节空间的位移小于下一段关节空间的位移时,当前关节空间关节末速度取相邻两段关节空间运动段运行速度的最大值作为当前关节末速度;
所述轨迹规划模块还用于:对于单段PTP,设置单段PTP的初始速度和末速度即可完成轨迹规划,对于连续多段PTP,将当前段PTP的末速度与下一段PTP的初速度平滑过渡;
所述轨迹规划模块还用于:对于连续多段PTP,将当前段PTP的末速度与下一段PTP的初速度平滑过渡包括:判断当前段PTP的位移deta_x1和下一段PTP的位移deta_x2;
在当前段PTP的位移deta_x1和下一段PTP的位移deta_x2方向相同的情况下,当deta_x1>=deta_x2时,当前PTP关节末速度取相邻两段PTP运动段运行速度的最小值为当前关节末速度;如果deta_x1<deta_x2,当前PTP关节末速度取相邻两段PTP运动段运行速度的最大值作为当前关节末速度;
在当前段PTP的位移deta_x1和下一段PTP的位移deta_x2方向相反的情况下,直接将当前关节末速度设置为0,然后把当前段PTP的末速度作为下一段PTP的初速度,完成速度平滑过渡;
插补运算模块,用于根据轨迹规划的输出数据,进行插补运算,以使轨迹连续;其中,输出数据包括初速度、末速度以及位置。
4.根据权利要求3所述的一种相邻关节空间轨迹过渡装置,其特征在于,所述时间同步模块还用于:各轴首先根据输入信息,参数自适应S速度规划,计算出每个轴的单段PTP运行时间,然后将各轴中最大的运行时间作为基准时间,其他各轴做基于基准时间的S速度规划,实现单段PTP各轴的时间同步。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202011142106.7A CN112192575B (zh) | 2020-10-21 | 2020-10-21 | 一种相邻关节空间轨迹过渡方法及装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202011142106.7A CN112192575B (zh) | 2020-10-21 | 2020-10-21 | 一种相邻关节空间轨迹过渡方法及装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN112192575A CN112192575A (zh) | 2021-01-08 |
| CN112192575B true CN112192575B (zh) | 2022-06-14 |
Family
ID=74012435
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202011142106.7A Active CN112192575B (zh) | 2020-10-21 | 2020-10-21 | 一种相邻关节空间轨迹过渡方法及装置 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN112192575B (zh) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115202293B (zh) * | 2022-07-15 | 2023-04-28 | 武汉瀚迈科技有限公司 | 一种工业机器人两段式速度规划方法 |
| CN115816464B (zh) * | 2022-12-30 | 2025-09-05 | 广东拓斯达科技股份有限公司 | 一种多轴机械手启动时间规划方法、装置、设备及介质 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61157909A (ja) * | 1984-12-29 | 1986-07-17 | Fanuc Ltd | ロボツトの経路誤差補正方式 |
| CN108890644B (zh) * | 2018-06-27 | 2020-06-30 | 清华大学 | 一种多轴同步轨迹规划方法、系统及计算机可读存储介质 |
| CN109623820B (zh) * | 2018-12-25 | 2021-09-14 | 哈工大机器人(合肥)国际创新研究院 | 一种机器人空间轨迹过渡方法 |
| CN109814496B (zh) * | 2019-01-31 | 2022-04-08 | 天津大学 | 一种s型加减速轨迹规划中多轴时间同步方法 |
| CN111604905B (zh) * | 2020-05-26 | 2022-04-05 | 慧灵科技(深圳)有限公司 | 关节轨迹规划的方法、装置、系统及存储介质 |
-
2020
- 2020-10-21 CN CN202011142106.7A patent/CN112192575B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN112192575A (zh) | 2021-01-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11103996B2 (en) | Robot joint space point-to-point movement trajectory planning method | |
| CN106647282B (zh) | 一种考虑末端运动误差的六自由度机器人轨迹规划方法 | |
| CN105082135B (zh) | 一种机器人点动操作的速度控制方法 | |
| CN112223290B (zh) | 一种关节空间连续点轨迹过渡方法及装置 | |
| CN103970139B (zh) | 一种机器人连续点位运动规划方法 | |
| CN109814496B (zh) | 一种s型加减速轨迹规划中多轴时间同步方法 | |
| CN112192575B (zh) | 一种相邻关节空间轨迹过渡方法及装置 | |
| CN111230864B (zh) | 一种五轴并联加工机器人的刀具路径规划方法 | |
| CN105183009B (zh) | 一种冗余机械臂轨迹控制方法 | |
| CN109773780A (zh) | 机械臂的过渡路径的位姿同步方法及装置 | |
| CN108189034A (zh) | 一种机器人连续轨迹实现方法 | |
| JP3204042B2 (ja) | ロボットの軌道の生成装置 | |
| CN108594765A (zh) | 一种逐点比较法平面直线插补计算方法 | |
| CN116985136A (zh) | 基于四元数的机械臂节点姿态速度前瞻控制方法及装置 | |
| JP2008183685A (ja) | ロボット制御装置及びロボットの位置指令値修正方法 | |
| Xu et al. | Research on motion trajector planning of industrial robot based on ROS | |
| CN112276949B (zh) | 一种相邻关节空间-笛卡尔空间轨迹过渡方法及装置 | |
| CN111515954B (zh) | 一种机械臂高质量运动路径生成方法 | |
| CN115890652B (zh) | 基于光学跟踪的机器人导航方法 | |
| CN113894796B (zh) | 一种基于梯形规划的机械臂多关节轨迹时间同步方法 | |
| CN117518996A (zh) | 一种五轴加工刀位直接线性插补方法 | |
| JP3130426B2 (ja) | モータ制御装置 | |
| JPH07141010A (ja) | 溶接用ロボットの制御方法 | |
| CN117008535B (zh) | 一种激光切割数控系统的飞行切割控制方法及装置 | |
| CN119937446B (zh) | 一种基于PLCopen的交叉耦合多轴同步插补控制方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| TR01 | Transfer of patent right | ||
| TR01 | Transfer of patent right |
Effective date of registration: 20220916 Address after: 236000 room 304, building 3, Zone C, intelligent equipment science and Technology Park, 3963 Susong Road, Hefei Economic and Technological Development Zone, Anhui Province Patentee after: Hefei Hagong Tunan intelligent control robot Co.,Ltd. Address before: 236000 area C, intelligent equipment science and Technology Park, 3963 Susong Road, Hefei Economic and Technological Development Zone, Anhui Province Patentee before: HRG INTERNATIONAL INSTITUTE FOR RESEARCH & INNOVATION |