CN112809727B - 一种绳牵引刚柔耦合变刚度夹持器 - Google Patents
一种绳牵引刚柔耦合变刚度夹持器 Download PDFInfo
- Publication number
- CN112809727B CN112809727B CN202110105280.2A CN202110105280A CN112809727B CN 112809727 B CN112809727 B CN 112809727B CN 202110105280 A CN202110105280 A CN 202110105280A CN 112809727 B CN112809727 B CN 112809727B
- Authority
- CN
- China
- Prior art keywords
- flexible
- rigid
- clamping assembly
- finger
- assembly
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000008878 coupling Effects 0.000 title claims abstract description 24
- 238000010168 coupling process Methods 0.000 title claims abstract description 24
- 238000005859 coupling reaction Methods 0.000 title claims abstract description 24
- 230000007246 mechanism Effects 0.000 claims abstract description 30
- 210000002435 tendon Anatomy 0.000 claims description 17
- 230000005540 biological transmission Effects 0.000 claims description 8
- 229920001971 elastomer Polymers 0.000 claims description 5
- 230000033001 locomotion Effects 0.000 claims description 5
- 238000004804 winding Methods 0.000 description 37
- 239000000463 material Substances 0.000 description 9
- 238000004519 manufacturing process Methods 0.000 description 6
- 238000010586 diagram Methods 0.000 description 4
- 239000013013 elastic material Substances 0.000 description 3
- 239000004743 Polypropylene Substances 0.000 description 2
- 230000009286 beneficial effect Effects 0.000 description 2
- 238000012423 maintenance Methods 0.000 description 2
- 238000000034 method Methods 0.000 description 2
- 229910052755 nonmetal Inorganic materials 0.000 description 2
- 229910021420 polycrystalline silicon Inorganic materials 0.000 description 2
- -1 polypropylene Polymers 0.000 description 2
- 229920001155 polypropylene Polymers 0.000 description 2
- 229920005591 polysilicon Polymers 0.000 description 2
- 230000003044 adaptive effect Effects 0.000 description 1
- 230000000712 assembly Effects 0.000 description 1
- 238000000429 assembly Methods 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 230000007812 deficiency Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 239000012636 effector Substances 0.000 description 1
- 210000004905 finger nail Anatomy 0.000 description 1
- 230000003993 interaction Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 238000011160 research Methods 0.000 description 1
- 230000007480 spreading Effects 0.000 description 1
- 238000006467 substitution reaction Methods 0.000 description 1
Images








Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/08—Gripping heads and other end effectors having finger members
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Manipulator (AREA)
Abstract
本发明提供一种绳牵引刚柔耦合变刚度夹持器,包括内侧柔性机构、外侧刚性抓取机构和驱动电机;内侧柔性机构由对称设置的柔性左夹持组件与柔性右夹持组件通过连接件连接组成;外侧刚性抓取机构包括左驱动组件、右驱动组件、底座以及对称设置的刚性左夹持组件与刚性右夹持组件;柔性左夹持组件与柔性右夹持组件通过连接件与底座连接;刚性左夹持组件的一端与柔性左夹持组件连接,另一端与底座铰接;刚性右夹持组件的一端与柔性右夹持组件连接,另一端与底座铰接;左驱动组件和右驱动组件分别设置在刚性左夹持组件和刚性右夹持组件内部并与驱动电机连接。该夹持器具有变刚度的夹持能力,从而实现灵活、安全夹取物体。
Description
技术领域
本发明涉及变刚度夹持器技术领域,更具体地说,涉及一种绳牵引刚柔耦合变刚度夹持器。
背景技术
变刚度夹持器是指对夹持器自身刚度的控制,可以在不同的操作环境下,通过改变自身刚度从而实现对不同复杂、易碎物体的夹取操作,一定程度上弥补传统夹持器刚度过大以及软体夹持器由于自身柔软性高而刚度和抓取力不足的问题,具有较好的安全性和适应性。因此,其广泛应用于主要以结构学、智能材料为研究基础的智能制造以及工业机器人等领域。
在工业以及日常生活的夹取任务中,一方面常需要机械臂的末端执行器对易碎物体进行稳定、自适应、变刚度的抓取操作,以实现尺寸复杂、形状不同的多抓取对象的安全抓取;另一方面,常需要将末端夹持器的尺寸模拟人手并运用绳索牵引作为驱动,在抓取过程中能够满足轻巧、灵活以及成本低的要求,以实现通用性、经济性和多夹持模式的夹取操作。由于上述两方面原因,同时实现变刚度、仿人手以及绳索欠驱动是工业机器人与智能制造领域的研究热点。
发明内容
本发明的目的在于克服现有技术中的缺点与不足,提供一种绳牵引刚柔耦合变刚度夹持器,该夹持器具有变刚度的夹持能力,从而实现灵活、安全夹取物体;同时,该夹持器具有尺寸小、结构简单、成本低等优点,以较少的驱动器驱动夹持器关节自由度,有利于对尺寸复杂、形状不同的多抓取对象进行安全抓取的实现,适合应用于工业机器人与智能制造等领域。
为了达到上述目的,本发明通过下述技术方案予以实现:一种绳牵引刚柔耦合变刚度夹持器,其特征在于:包括内侧柔性机构、外侧刚性抓取机构和驱动电机;所述内侧柔性机构由对称设置的柔性左夹持组件与柔性右夹持组件通过连接件连接组成;所述外侧刚性抓取机构包括左驱动组件、右驱动组件、底座以及对称设置的刚性左夹持组件与刚性右夹持组件;所述柔性左夹持组件与柔性右夹持组件通过连接件与底座连接;所述刚性左夹持组件的一端与柔性左夹持组件连接,另一端与底座铰接;所述刚性右夹持组件的一端与柔性右夹持组件连接,另一端与底座铰接;所述左驱动组件和右驱动组件分别设置在刚性左夹持组件和刚性右夹持组件内部并与驱动电机连接,实现驱动电机通过左驱动组件和右驱动组件驱动刚性左夹持组件和刚性右夹持组件进行夹持或张开运动。
所述柔性左夹持组件与柔性右夹持组件结构相同,均包括依次连接的顶端夹持杆、第一双面柔性转动副、柔性夹持杆和第二双面柔性转动副;所述柔性左夹持组件与柔性右夹持组件均通过第二双面柔性转动副与连接件连接。
所述第一双面柔性转动副和第二双面柔性转动副均为正圆型双面柔性转动副。本发明采用的正圆型双面柔性转动副的主要特征是:结构简单、易于制造、不需要组装与维护、没有摩擦损失,表现在拓扑结构与其对应的刚度机构类似,多集中柔度型柔性运动副代替传统运动副。
所述顶端夹持杆的表面设置用于增大摩擦力的齿状结构。
所述内侧柔性机构为一体成型的橡胶构件。该内侧柔性机构的材料选择的基本原则:其一,主要考虑其强度极限与弹性模量之比。如:聚丙烯、多晶硅、橡胶等为理想的非金属弹性材料。其二,充分考虑材料的抗疲劳指标。确保材料在变形时不会发生张力松弛或蠕变。其三,在以上两点都满足的情况下,考虑材料的经济适用性。
所述刚性左夹持组件与刚性右夹持组件结构相同,均包括依次铰接的末指和根指;所述刚性左夹持组件通过末指与柔性左夹持组件铰接,并通过根指与底座铰接;所述刚性右夹持组件通过末指与柔性右夹持组件铰接,并通过根指与底座铰接。
所述左驱动组件和右驱动组件结构相同,均包括设置在末指和根指内腔的弹性牵引装置和传动装置;所述传动装置圈绕弹性牵引装置并穿出底座与驱动电机连接。
所述弹性牵引装置包括拉伸回弹弹簧和扭簧;所述扭簧设置在根指与底座的铰接链处;所述拉伸回弹弹簧一端固定在末指上,另一端依次绕过末指与根指的铰接链以及根指与底座的铰接链,最后固定于连接件与底座的连接处,形成夹持器的伸肌腱结构。
所述传动装置包括牵引绳索、设置在末指内腔的第一绕线柱、以及均设置在根指内腔的第二绕线柱和第三绕线柱;所述第一绕线柱和第二绕线柱靠近末指和根指的铰接链设置,第三绕线柱靠近根指与底座的铰接链设置;
所述牵引绳索依次绕过第一绕线柱、末指与根指的铰接链、第二绕线柱、第三绕线柱以及根指与底座的铰接链,最后穿出底座与驱动电机连接,形成夹持器的屈肌腱结构。
所述牵引绳索和拉伸回弹弹簧连接为一体。
与现有技术相比,本发明具有如下优点与有益效果:
1、本发明绳牵引刚柔耦合变刚度夹持器具有变刚度的夹持能力,从而实现灵活、安全夹取物体;同时,该夹持器具有尺寸小、结构简单、成本低等优点,以较少的驱动器驱动夹持器关节自由度,有利于对尺寸复杂、形状不同的多抓取对象进行安全抓取的实现,适合应用于工业机器人与智能制造等领域。
2、本发明绳牵引刚柔耦合变刚度夹持器在开环抓取控制下可以实现平面夹持,即精确抓取和动力抓取,应用于工业领域复杂的五金件、易损异形件等,可适用抓取生活中常见的大部分物品,具有较好的人机交互性。
3、本发明夹持器刚柔耦合实现的变刚度原理,使得夹持器能够适应更多的物体并能够对其进行精准抓取;顶端夹持杆设计的齿状结构可以对较小、轻薄的物体进行精确抓取的操作,同时增加抓取物体的接触摩擦力,增加抓取的成功率。
4、本发明采用绳牵引欠驱动的驱动方式结构简单、尺寸类似人手,具有良好的自适应性,其能够实现多工作模式的同时不需要大量的驱动器和复杂的控制算法。
附图说明
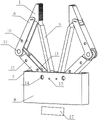
图1是本发明一种绳牵引刚柔耦合变刚度夹持器的立体图;
图2是本发明一种绳牵引刚柔耦合变刚度夹持器的柔性机构的立体图;
图3是本发明一种绳牵引刚柔耦合变刚度夹持器的正视图(以及左夹持和底座的剖面图);
图4是本发明一种绳牵引刚柔耦合变刚度夹持器的弹性牵引装置的绳索路径;
图5是本发明一种绳牵引刚柔耦合变刚度夹持器的顶端夹持杆的放大图;
图6是本发明一种绳牵引刚柔耦合变刚度夹持器精确抓取的简图;
图7是本发明一种绳牵引刚柔耦合变刚度夹持器动力抓取的简图;
图8是本发明一种绳牵引刚柔耦合变刚度夹持器中根指和底座的关节轴的简图;
图9是本发明一种绳牵引刚柔耦合变刚度夹持器的第一绕线柱、第二绕线柱和第三绕线柱的简图;
其中,1为顶端夹持杆;2为第一双面柔性转动副;3为柔性夹持杆;4为第二双面柔性转动副;5为连接件;6为末指;7为根指;8为底座;9、15均为铆钉;10为第一绕线柱;11、14均为铰接链;12为第二绕线柱、13为第三绕线柱;16为小孔;17为驱动电机;18为拉伸回弹弹簧;19为牵引绳索;20为扭簧;21为齿状结构;22为微型轴承;23为凹槽;24为螺母。
具体实施方式
下面结合附图与具体实施方式对本发明作进一步详细的描述。
实施例
如图1至图9所示,本发明一种绳牵引刚柔耦合变刚度夹持器包括内侧柔性机构、外侧刚性抓取机构和驱动电机17,其中,内侧柔性机构由对称设置的柔性左夹持组件与柔性右夹持组件通过连接件5连接组成。而外侧刚性抓取机构包括左驱动组件、右驱动组件、底座8以及对称设置的刚性左夹持组件与刚性右夹持组件,本发明的柔性左夹持组件与柔性右夹持组件通过连接件5和铆钉15与底座8连接,刚性左夹持组件的一端通过铆钉9与柔性左夹持组件连接,另一端与底座8铰接,刚性右夹持组件的一端通过铆钉9与柔性右夹持组件连接,另一端与底座8铰接,而左驱动组件和右驱动组件分别设置在刚性左夹持组件和刚性右夹持组件内部并与驱动电机17连接,实现驱动电机17通过左驱动组件和右驱动组件驱动刚性左夹持组件和刚性右夹持组件进行夹持或张开运动。
具体地说,柔性左夹持组件与柔性右夹持组件结构相同,均包括依次连接的顶端夹持杆1、第一双面柔性转动副2、柔性夹持杆3和第二双面柔性转动副4,该柔性左夹持组件与柔性右夹持组件均通过第二双面柔性转动副4与连接件5连接,其中,第一双面柔性转动副2和第二双面柔性转动副4均为正圆型双面柔性转动副。本发明采用的正圆型双面柔性转动副的主要特征是:结构简单、易于制造、不需要组装与维护、没有摩擦损失,表现在拓扑结构与其对应的刚度机构类似,多集中柔度型柔性运动副代替传统运动副。
为了增加握住物体的摩擦接触,顶端夹持杆1的表面设置用于增大摩擦力的齿状结构21,这样有利于在平面夹取尺寸较薄的物体,比如,硬币。类似人手在进行精确捏取硬币时,手指甲的作用。
本发明的内侧柔性机构为一体成型的橡胶构件。该内侧柔性机构的材料选择的基本原则:其一,主要考虑其强度极限与弹性模量之比。如:聚丙烯、多晶硅、橡胶等为理想的非金属弹性材料。其二,充分考虑材料的抗疲劳指标。确保材料在变形时不会发生张力松弛或蠕变。其三,在以上两点都满足的情况下,考虑材料的经济适用性。
本发明的刚性左夹持组件与刚性右夹持组件结构相同,均包括依次铰接的末指6和根指7,刚性左夹持组件通过末指6与柔性左夹持组件铰接,并通过根指7与底座8铰接,而刚性右夹持组件通过末指6与柔性右夹持组件铰接,并通过根指7与底座8铰接。
本发明中末指6与根指7关节处的铰接链11是由关节轴、微型轴承以及内嵌螺母构成。关节轴的两端穿过两个微型轴承,微型轴承内径为4mm、外径为6mm且分别嵌入在末指6与根指7的关节处,内嵌螺母将关节轴固定,实现末指6与根指7的铰接。本发明中根指7与底座8关节处的铰接链14是由关节轴、微型轴承22以及内嵌螺母构成。关节轴的两端由内嵌螺母固定在底座8外壳处,关节轴穿过镶嵌在根指7关节处的两个微型轴承22,并设置了一个凹槽23,实现夹持器的根指7与底座8进行铰接。
本发明的左驱动组件和右驱动组件结构相同,均包括设置在末指6和根指7内腔的弹性牵引装置和传动装置,该传动装置圈绕弹性牵引装置并穿出底座8与驱动电机17连接。其中,弹性牵引装置包括拉伸回弹弹簧18和扭簧20,扭簧20设置在根指7与底座8的铰接链14处,扭簧20穿过关节轴,并安装在凹槽23内,扭簧20的一端钢丝在根指7处,另一端在底座8处。当夹持器结束夹取物体,可通过扭簧20的自身弹力控制根指7恢复原来张开的位置。
拉伸回弹弹簧18为弹性材料制成的弹性元件,其一端固定在末指6上,另一端依次绕过末指6与根指7的铰接链11的关节轴,以及根指7与底座8的铰接链14的关节轴,拉伸回弹弹簧18与扭簧20位置平行且没有接触。最后,拉伸回弹弹簧18固定于连接件5与底座8连接处的铆钉15,形成夹持器的伸肌腱结构。拉伸回弹弹簧18的设计具有能够满足夹持器保持张开的初始状态,便于对较大物体的抓取操作。本发明凹槽23是为了固定扭簧20,防止夹持器的伸肌腱或者屈肌腱被扭簧20干扰。
本发明的传动装置包括牵引绳索19、设置在末指6内腔的第一绕线柱10、以及均设置在根指7内腔的第二绕线柱12和第三绕线柱13,其中,第一绕线柱10和第二绕线柱12靠近末指6和根指7的铰接链11设置,第三绕线柱13靠近根指7与底座8的铰接链14设置。而牵引绳索19依次绕过第一绕线柱10、末指6与根指7铰接链11的关节轴、第二绕线柱12、第三绕线柱13以及根指7与底座8的铰接链14的关节轴,最后穿出底座8设置的预留孔16与驱动电机17连接,形成夹持器的屈肌腱结构。具体地说,第一绕线柱10的下侧与牵引绳索19接触,第一绕线柱10两端分别穿过末指6外壳上的两个相互对称的预留孔,由螺母24固定。两端螺母内嵌与末指6外壳处。第二绕线柱12和第三绕线柱13的下侧与牵引绳索19接触,第二绕线柱12和第三绕线柱13的两端分别穿过根指7外侧孔,螺母24内嵌与根指7外壳处。
本发明是由第一绕线柱10、第二绕线柱12和第三绕线柱13以及铰接链的关节轴将驱动电机17的旋转运动转换成绳索牵引左、右夹持的平面运动。本发明夹持器的伸肌腱结构和屈肌腱结构具有结构简单、原理简单和成本低的特点,对所构成的夹持器原件尺寸要求低,尺寸小,可制作为人手大小。
本发明牵引绳索19和拉伸回弹弹簧18连接为一体,两者在经过末指6和根指7时,通过末指6底端、根指7顶端和底座8的空隙进行连接。牵引绳19在末指6顶端固定,经过第一绕线柱10下侧、铰接链11的上端、第二绕线柱12和第三绕线柱13下侧以及铰接14上端,穿过16预留孔与驱动电机17连接。驱动电机17通过转动内部的第一绕线柱10、第二绕线柱12和第三绕线柱13对牵引绳进行缠绕,使之可以产生牵引绳19收缩。驱动电机17对牵引绳19的拉力通过预留孔16到达铰接链14的关节轴,关节轴与牵引绳19接触,改变拉力的方向,使牵引绳19拉力继续沿牵引绳19对三个绕线柱切线法线的方向有一个向上的力,即左夹持组件有一个由左向右向内闭合的力。对称的,右夹持组件有一个由右向左向内闭合的力。牵引绳19尽量竖直穿过底座的预留孔16,可以减少摩擦。而驱动电机17可选取伺服电机、步进电机等。本实施例通过绳索牵引欠驱动的驱动方式结构简单、尺寸小,具有良好的自适应性,其能够实现多工作模式的同时不需要大量的驱动器和复杂的控制算法。
当夹持器在抓取物体时,针对其抓取对象在两点夹持以及包络夹持时夹持器的开口大小进行优化设计,得出最佳的牵引绳和伸肌腱的拉伸长度。结合内侧柔性机构的变形力和电机提供的绳索拉力计算出所需夹持器的抓取力。
非工作状态下的夹持器,由于伸肌腱结构、扭簧20以及内侧柔性机构的弹力,使夹持器保持张开的最大状态。当夹持器工作时,控制驱动电机17正转,通过牵引绳19一端,固定在驱动电机17转动轴上,另一端固定在末指6顶端,使牵引绳19绷直对夹持器的屈肌腱结构产生拉力。本实例中,驱动电机17转动轴同时驱动夹持器左右两根屈肌腱结构,使夹持器左右两根手指同时弯曲,并带动内侧柔性机构弯曲。如图6所示,当夹持器在抓取直径较小的物体时,可对其进行精确夹持,接触到柔性左夹持组件和柔性右夹持组件的顶端夹持杆1时,刚性左夹持组件和刚性右夹持组件的末指6与根指7由屈肌腱结构的收缩,带动顶端夹持杆1向内抓取物体。如图7所示,当夹持器抓取直径较大的物体时,物体从末指6到根指7连续接触从而确保其包络夹持,同时刚性左夹持组件和刚性右夹持组件被驱动电机17控制完成一个完整的开环抓取控制。夹持器松开夹持对象时,驱动电机17反转。使屈肌腱结构沿原路径变松,由伸肌腱结构、扭簧以及内侧柔性机构的弹力使夹持器恢复最初状态。
上述实施例为本发明较佳的实施方式,但本发明的实施方式并不受上述实施例的限制,其他的任何未背离本发明的精神实质与原理下所作的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本发明的保护范围之内。
Claims (7)
1.一种绳牵引刚柔耦合变刚度夹持器,其特征在于:包括内侧柔性机构、外侧刚性抓取机构和驱动电机;所述内侧柔性机构由对称设置的柔性左夹持组件与柔性右夹持组件通过连接件连接组成;所述外侧刚性抓取机构包括左驱动组件、右驱动组件、底座以及对称设置的刚性左夹持组件与刚性右夹持组件;所述柔性左夹持组件与柔性右夹持组件通过连接件与底座连接;所述刚性左夹持组件的一端与柔性左夹持组件连接,另一端与底座铰接;所述刚性右夹持组件的一端与柔性右夹持组件连接,另一端与底座铰接;所述左驱动组件和右驱动组件分别设置在刚性左夹持组件和刚性右夹持组件内部并与驱动电机连接,实现驱动电机通过左驱动组件和右驱动组件驱动刚性左夹持组件和刚性右夹持组件进行夹持或张开运动;
所述刚性左夹持组件与刚性右夹持组件结构相同,均包括依次铰接的末指和根指;所述刚性左夹持组件通过末指与柔性左夹持组件铰接,并通过根指与底座铰接;所述刚性右夹持组件通过末指与柔性右夹持组件铰接,并通过根指与底座铰接;
所述左驱动组件和右驱动组件结构相同,均包括设置在末指和根指内腔的弹性牵引装置和传动装置;所述传动装置圈绕弹性牵引装置并穿出底座与驱动电机连接;
所述弹性牵引装置包括拉伸回弹弹簧和扭簧;所述扭簧设置在根指与底座的铰接链处;所述拉伸回弹弹簧一端固定在末指上,另一端依次绕过末指与根指的铰接链以及根指与底座的铰接链,最后固定于连接件与底座的连接处,形成夹持器的伸肌腱结构。
2.根据权利要求1所述的绳牵引刚柔耦合变刚度夹持器,其特征在于:所述柔性左夹持组件与柔性右夹持组件结构相同,均包括依次连接的顶端夹持杆、第一双面柔性转动副、柔性夹持杆和第二双面柔性转动副;所述柔性左夹持组件与柔性右夹持组件均通过第二双面柔性转动副与连接件连接。
3.根据权利要求2所述的绳牵引刚柔耦合变刚度夹持器,其特征在于:所述第一双面柔性转动副和第二双面柔性转动副均为正圆型双面柔性转动副。
4.根据权利要求2所述的绳牵引刚柔耦合变刚度夹持器,其特征在于:所述顶端夹持杆的表面设置用于增大摩擦力的齿状结构。
5.根据权利要求1所述的绳牵引刚柔耦合变刚度夹持器,其特征在于:所述内侧柔性机构为一体成型的橡胶构件。
6.根据权利要求1所述的绳牵引刚柔耦合变刚度夹持器,其特征在于:所述传动装置包括牵引绳索、设置在末指内腔的第一绕线柱、以及均设置在根指内腔的第二绕线柱和第三绕线柱;所述第一绕线柱和第二绕线柱靠近末指和根指的铰接链设置,第三绕线柱靠近根指与底座的铰接链设置;
所述牵引绳索依次绕过第一绕线柱、末指与根指的铰接链、第二绕线柱、第三绕线柱以及根指与底座的铰接链,最后穿出底座与驱动电机连接,形成夹持器的屈肌腱结构。
7.根据权利要求6所述的绳牵引刚柔耦合变刚度夹持器,其特征在于:所述牵引绳索和拉伸回弹弹簧连接为一体。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202110105280.2A CN112809727B (zh) | 2021-01-26 | 2021-01-26 | 一种绳牵引刚柔耦合变刚度夹持器 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202110105280.2A CN112809727B (zh) | 2021-01-26 | 2021-01-26 | 一种绳牵引刚柔耦合变刚度夹持器 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN112809727A CN112809727A (zh) | 2021-05-18 |
| CN112809727B true CN112809727B (zh) | 2022-07-29 |
Family
ID=75859399
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202110105280.2A Active CN112809727B (zh) | 2021-01-26 | 2021-01-26 | 一种绳牵引刚柔耦合变刚度夹持器 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN112809727B (zh) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2024254685A1 (en) * | 2023-06-12 | 2024-12-19 | Lionel Birglen | Mechanical finger with variable stiffness |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20040046005A (ko) * | 2002-11-26 | 2004-06-05 | 한국과학기술원 | 케이블 메카니즘을 이용한 로봇 그리퍼 |
| CN102689309A (zh) * | 2012-05-29 | 2012-09-26 | 江南大学 | 柔顺性气动绳牵引弯曲板弹簧骨架被动抓持器 |
| CN106926266A (zh) * | 2017-02-27 | 2017-07-07 | 哈尔滨工业大学深圳研究生院 | 一种绳驱联动的机械夹持装置 |
| CN106976101A (zh) * | 2017-05-15 | 2017-07-25 | 福州大学 | 一种欠驱动二指抓取灵巧手及其工作方法 |
| CN110561478A (zh) * | 2019-09-30 | 2019-12-13 | 佛山科学技术学院 | 一种刚柔耦合夹持器 |
| CN111015713A (zh) * | 2019-12-11 | 2020-04-17 | 佛山科学技术学院 | 一种可增强夹持力的机械手 |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3383599A4 (en) * | 2015-12-03 | 2019-10-30 | SRI International Inc. | ROBOT GRAB |
| CN107199573A (zh) * | 2017-07-08 | 2017-09-26 | 佛山市正略信息科技有限公司 | 一种生产线夹持工件用机械手 |
-
2021
- 2021-01-26 CN CN202110105280.2A patent/CN112809727B/zh active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20040046005A (ko) * | 2002-11-26 | 2004-06-05 | 한국과학기술원 | 케이블 메카니즘을 이용한 로봇 그리퍼 |
| CN102689309A (zh) * | 2012-05-29 | 2012-09-26 | 江南大学 | 柔顺性气动绳牵引弯曲板弹簧骨架被动抓持器 |
| CN106926266A (zh) * | 2017-02-27 | 2017-07-07 | 哈尔滨工业大学深圳研究生院 | 一种绳驱联动的机械夹持装置 |
| CN106976101A (zh) * | 2017-05-15 | 2017-07-25 | 福州大学 | 一种欠驱动二指抓取灵巧手及其工作方法 |
| CN110561478A (zh) * | 2019-09-30 | 2019-12-13 | 佛山科学技术学院 | 一种刚柔耦合夹持器 |
| CN111015713A (zh) * | 2019-12-11 | 2020-04-17 | 佛山科学技术学院 | 一种可增强夹持力的机械手 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN112809727A (zh) | 2021-05-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN109176568B (zh) | 一种腱绳-电磁力联合驱动的刚软耦合多指灵巧手 | |
| CN108908382A (zh) | 腱绳传动的耦合自适应三指差动机器人手爪装置 | |
| CN101804633B (zh) | 腱绳并联灵巧欠驱动仿生机器人手装置 | |
| CN105364938B (zh) | 带轮式协同锁定联动自适应机器人手指装置 | |
| CN104889998B (zh) | 具有包络与夹持功能的欠驱动机器人手指装置 | |
| CN108994864A (zh) | 双腱绳串联式耦合自适应手指装置 | |
| CN105619440B (zh) | 开链柔性件平夹自适应机器人手指装置 | |
| CN105150225A (zh) | 杆轮并联式捏握复合自适应机器人手指装置 | |
| CN101716767B (zh) | 耦合欠驱动一体化仿生手装置 | |
| CN107363856B (zh) | 一种自适应手指、两爪机械手以及机器人 | |
| CN100551640C (zh) | 腱绳齿轮欠驱动机器人手指装置 | |
| CN111496828A (zh) | 一种机器人末端灵巧型欠驱动仿生抓手 | |
| CN101653941A (zh) | 变抓力的滑块式直接欠驱动仿生手装置 | |
| CN113370241A (zh) | 网状结构的大承载多指型软体机械手 | |
| CN113799162B (zh) | 面向异形物体的机器人抓取手爪 | |
| CN112720558A (zh) | 一种电机直驱的软指尖机器人灵巧手 | |
| CN106799742A (zh) | 精确平夹自适应与耦合自适应模式切换机器人手指装置 | |
| CN112809727B (zh) | 一种绳牵引刚柔耦合变刚度夹持器 | |
| CN211440027U (zh) | 感知触发零延时传动平夹自适应机器人手指装置 | |
| CN207696544U (zh) | 腱驱动式仿生机械手 | |
| CN101829995B (zh) | 曲柄滑块式柔性件并联耦合欠驱动手指装置 | |
| CN101664930B (zh) | 耦合欠驱动一体化双关节机器人手指装置 | |
| CN212287680U (zh) | 滑块柔性件平夹间接自适应机器人手装置 | |
| CN102699926A (zh) | 可切换多抓取模式欠驱动机器人手指装置 | |
| CN212331062U (zh) | 一种滑块式欠驱动三关节机械手 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| CP03 | Change of name, title or address |
Address after: No.33, Guangyun Road, Nanhai District, Foshan City, Guangdong Province, 528200 Patentee after: Foshan University Country or region after: China Address before: No.33, Guangyun Road, Nanhai District, Foshan City, Guangdong Province, 528200 Patentee before: FOSHAN University Country or region before: China |
|
| CP03 | Change of name, title or address |