CN115123761A - 货物搬运装置、货物搬运系统以及卸货方法 - Google Patents
货物搬运装置、货物搬运系统以及卸货方法 Download PDFInfo
- Publication number
- CN115123761A CN115123761A CN202110323798.3A CN202110323798A CN115123761A CN 115123761 A CN115123761 A CN 115123761A CN 202110323798 A CN202110323798 A CN 202110323798A CN 115123761 A CN115123761 A CN 115123761A
- Authority
- CN
- China
- Prior art keywords
- cargo
- cargo handling
- handling device
- protection
- telescopic
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images









Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G35/00—Mechanical conveyors not otherwise provided for
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G67/00—Loading or unloading vehicles
- B65G67/02—Loading or unloading land vehicles
- B65G67/24—Unloading land vehicles
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Aviation & Aerospace Engineering (AREA)
- Warehouses Or Storage Devices (AREA)
Abstract
本申请提供一种货物搬运装置、货物搬运系统以及卸货方法,货物搬运装置包括小车,小车具有承载货物的承载面;防护组件,防护组件用于对位于承载面上的货物进行限位,防护组件包括位于承载面至少一侧的第一防护件和固定于第一防护件上的第一伸缩件,第一防护件朝向货物的一侧形成第一限位面,第一伸缩件具有伸缩方向,伸缩方向与第一限位面平行设置,且伸缩方向具有与承载面平行的分量。本申请通过在小车背面设置第一防护件,在另外一辆货物搬运装置卸货时,第一伸缩件伸入货物的背面,并对货物的背面进行防倾保护,使得另外一辆货物搬运装置卸货完成后可以正常离开,有效避免了货物搬运装置在货物转移以及卸货后离开过程货物摔落损坏的现象。
Description
技术领域
本申请涉及物流仓储技术领域,具体涉及一种货物搬运装置、货物搬运系统以及卸货方法。
背景技术
目前,在物流仓储技术领域,常常面临现场生产货物摆放、装车等货物搬运的过程,采用人工进行货物转移摆放存在效率低劳动强度大的问题,而采用无人搬运车(Automated Guided Vehicle,简称AGV)在运输过程中包裹容易摔落,特别是在无人搬运车下降卸货以及卸货后离开的过程中,栈板上的货物更容易摔落,造成安全隐患和货物损坏的现象,影响场地空间使用。
发明内容
本申请提供一种货物搬运装置、货物搬运系统以及卸货方法,旨在解决现有货物搬运装置卸货过程货物容易摔落而损坏的技术问题。
第一方面,本申请提供一种货物搬运装置,包括:
小车,小车具有承载货物的承载面;
防护组件,防护组件固定在小车上,用于对位于承载面上的货物进行限位,防护组件包括位于承载面至少一侧的第一防护件和固定于第一防护件上的第一伸缩件,第一防护件朝向货物的一侧形成第一限位面,第一伸缩件具有伸缩方向,伸缩方向与第一限位面平行设置,且伸缩方向具有与承载面平行的分量。
在一些实施例中,第一防护件为防护板,防护板朝向货物的一面形成第一限位面,防护板于第一限位面的表面具有引导第一伸缩件伸入货物与防护板间的避让槽。
在一些实施例中,第一伸缩件包括固定部分和伸缩部分,防护板的侧面开设有容纳第一伸缩件的空腔,固定部分位于防护板的空腔内,伸缩部分自空腔朝向防护板外部伸缩。
在一些实施例中,防护组件还包括朝向货物两侧设置的第二防护件;
第二防护件具有使第一伸缩件横向通过的横向通槽,第二防护件与第一防护件连接。
在一些实施例中,第二防护件包括多根水平布置的防护杆,防护杆临近第一防护件的一端与第一防护件连接,相邻的防护杆间形成第一伸缩件通过的横向通槽。
在一些实施例中,小车包括第一货叉和第二货叉,第一货叉与第二货叉间具有卸货槽。
在一些实施例中,承载面为倾斜设置的斜面,承载面与水平面的夹角为5°~10°
第二方面,本申请提供一种货物搬运系统,系统包括:至少两辆如第一方面所述的货物搬运装置、现场总线以及控制器,货物搬运装置与控制器通讯连接。
第三方面,本申请提供一种卸货方法,方法应用于如第二方面所述的货物搬运系统,方法包括:
控制第一货物搬运装置和第二货物搬运装置到达目的地并排排列,其中,第一货物搬运装置和第二货物搬运装置运载需摆放的货物;
控制第一货物搬运装置的第一伸缩件朝向第二货物搬运装置伸出,第一伸缩件伸入第二货物搬运装置运载的货物的背面,并对货物的背面进行防倾保护;
控制第一货物搬运装置和/或第二货物搬运装置移动,以使得第二货物搬运装置完成卸货过程。
在一些实施例中,控制第一货物搬运装置和第二货物搬运装置到达目的地并排排列的步骤包括:
控制第二货物搬运装置移动至目的地,然后控制第一货物搬运装置移动至目的地并与第二货物搬运装置并排;或者
控制第一货物搬运装置和第二货物搬运装置并排移动并到达目的地。
在一些实施例中,控制第一货物搬运装置和/或第二货物搬运装置移动,以使得第二货物搬运装置完成卸货过程的步骤包括:
控制第一货物搬运装置沿第一方向移动,第一方向为货物背面指向货物正面的方向;和/或者
控制第二货物搬运装置沿第二方向移动,第二方向为货物正面指向货物背面的方向。
在一些实施例中,在第二货物搬运装置完成卸货过程后,方法还包括:
控制第一货物搬运装置和第二货物搬运装置再次并排排列;
控制第二货物搬运装置的第一伸缩件朝向第一货物搬运装置伸出,第一伸缩件伸入第一货物搬运装置运载的货物的背面,并对货物的背面进行防倾保护;
控制第一货物搬运装置和/或第二货物搬运装置移动,以使得第一货物搬运装置完成卸货过程。
本申请通过在小车背面设置第一防护件,有效避免了货物在转移过程中向后倾倒的现象,同时在另外一辆货物搬运装置卸货时,第一伸缩件伸入货物的背面,并对货物的背面进行防倾保护,使得另外一辆货物搬运装置卸货完成后可以正常离开,有效避免了货物搬运装置在货物转移以及卸货后离开过程中货物摔落损坏的现象。
附图说明
为了更清楚地说明本申请实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1是本申请实施例中提供的货物搬运装置的搭载货物的示意图;
图2是本申请实施例中提供的货物搬运装置的一种结构示意图;
图3是本申请实施例中提供的两辆货物搬运装置协作卸货的示意图;
图4是本申请实施例中提供的第一防护件与小车的一种结构示意图;
图5是本申请实施例中提供的第一防护件与小车的一种结构示意图;
图6是本申请实施例中提供的卸货方法的一种流程示意图;
图7是本申请实施例中提供的货物搬运装置卸货的一种场景示意图;
图8是本申请实施例中提供的卸货工作过程一种示意图;
图9是本申请实施例中提供的卸货工作过程一种示意图;
图10是本申请实施例中提供的卸货工作过程一种示意图。
其中,10小车,11第一货叉,12第二货叉,13移动轮,101承载面;
20防护组件,21第一防护件,211防护板,212第一伸缩件,213第一限位面,214避让槽,22第二防护件,221防护杆,222横向通槽;
30栈板;40货物。
具体实施方式
下面将结合本申请实施例中的附图,对本申请实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
在本申请中,“示例性”一词用来表示“用作例子、例证或说明”。本申请中被描述为“示例性”的任何实施例不一定被解释为比其它实施例更优选或更具优势。为了使本领域任何技术人员能够实现和使用本发明,给出了以下描述。在以下描述中,为了解释的目的而列出了细节。应当明白的是,本领域普通技术人员可以认识到,在不使用这些特定细节的情况下也可以实现本发明。在其它实例中,不会对公知的结构和过程进行详细阐述,以避免不必要的细节使本发明的描述变得晦涩。因此,本发明并非旨在限于所示的实施例,而是与符合本申请所公开的原理和特征的最广范围相一致。
目前,为提高生产现场货物摆放、装车等货物移动过程的效率,无人搬运车(AGV)越来越受到企业的关注,其中无人搬运车装备有电磁或光学等自动导引装置,能够沿规定的引导路径行驶,以自动完成生产现场货物摆放、装车等货物移动过程。以利用电磁轨道来设立无人搬运车行进路线为例,电磁轨道黏贴于地板上,无人搬运车则依循电磁轨道所带来的讯息进行移动、装车或卸车动作等。
然而采用无人搬运车往往存在运输过程货物掉落的情况,同时在无人搬运车下降卸货并离开的过程中,无人搬运车容易触碰货物进而导致货物倾倒的情况。因此,针对该种现象,本申请实施例提供一种货物搬运装置、货物搬运系统以及卸货方法,适用于各类货物搬运装置(例如板车、推车或叉车等)的防倾倒保护,特别适用于无人搬运车的防倾倒保护,以下进行详细说明。
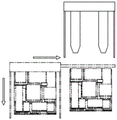
首先,参阅图1以及图2,图1示出了本申请实施例中提供的货物搬运装置的搭载货物40的示意图,图2示出了本申请实施例中提供的货物搬运装置的一种结构示意图。其中,货物搬运装置包括:
小车10,小车10具有承载货物40的承载面101;
防护组件20,防护组件20固定在小车10上,用于对位于承载面101上的货物40进行限位,防护组件20包括位于承载面101至少一侧的第一防护件21和固定于第一防护件21上的第一伸缩件212,第一防护件21朝向货物40的一侧形成第一限位面213,第一伸缩件212具有伸缩方向,伸缩方向与第一限位面213平行设置,且伸缩方向具有与承载面101平行的分量。
本申请通过在小车10背面设置第一防护件21,有效避免了货物40在转移过程中向后倾倒的现象,同时在另外一辆货物搬运装置卸货时,第一伸缩件212伸入货物40的背面,并对货物40的背面进行防倾保护,使得另外一辆货物搬运装置卸货完成后可以正常离开,有效避免了货物搬运装置在货物40转移以及卸货后离开过程中货物40摔落损坏的现象。
其中,小车10具有承载货物40的承载面101,用于搭载需运输的货物40,为便于小车10移动,小车10下安装有移动轮13,可以理解的,对于无人搬运车,小车10还可以具有驱动移动轮13移动的驱动机构,例如驱动电机以及传动齿轮等,同时,为便于实现自动导航进行货物40搬运,小车10还可以具有电磁或光学等自动导引装置,使得小车10能够沿规定的导引路径行驶。
在本申请的一些实施例中,为便于小车10卸下货物40,小车10还可以具有升降机构,以通过升降机构进行货物40装载或卸下。作为一示例性的,如图2所示,小车10包括第一货叉11和第二货叉12,第一货叉11与第二货叉12间具有卸货槽,移动轮13设置于第一货叉11和第二货叉12底部,货物40堆放在栈板30上,栈板30下部具有第一货叉11和第二货叉12伸入的空间,当进行货物40装载时,升降机构降下第一货叉11和第二货叉12,通过移动轮13移动将第一货叉11和第二货叉12伸入栈板30底部,然后升起第一货叉11和第二货叉12,最终装载货物40的栈板30置于小车10上,完成货物40的装载过程;当进行货物40卸货时,升降机构降下第一货叉11和第二货叉12,栈板30与地面或堆放平台接触,通过移动轮13移动将第一货叉11和第二货叉12退出,进而完成小车10卸货过程。
防护组件20用于对小车10上货物40的至少背侧进行防倾倒保护,具体的,防护组件20固定在小车10上,用于对位于承载面101上的货物40进行限位,其中防护组件20包括位于承载面101至少一侧(例如如图1所示货物40的背侧)的第一防护件21和固定于第一防护件21上的第一伸缩件212,第一防护件21朝向货物40的一侧形成第一限位面213,以阻挡货物40从第一限位面213倾倒。
第一伸缩件212具有预设的伸缩方向,伸缩方向与第一限位面213平行设置,且伸缩方向具有与承载面101平行的分量,示例性的,伸缩方向可以与水平面平行,使得第一伸缩件212的伸缩方向朝向小车10侧面方向水平伸出,以在另外一辆货物搬运装置卸货时第一伸缩件212从侧面伸入该辆货物搬运装置运输货物40的背面,并对货物40的背面进行防倾保护。参阅图3,图3示出了本申请实施例中提供的两辆货物搬运装置协作卸货的示意图,由于在货物搬运装置卸货时,货物40的背侧具有伸入的第一伸缩件212的保护,因此在货物搬运装置卸货以及退出的过程中,货物40不会向后倾倒,实现了货物40背侧防倾倒保护的目的。
作为一示例性的,参阅图4,图4示出了本申请实施例中第一防护件21与小车10的结构示意图,其中第一防护件21可以为一竖直放置的防护板211,防护板211朝向货物40的一面形成第一限位面213,即该防护板211的表面朝向小车10的背侧,通过该防护板211的板面抵挡货物40背面,避免在货物40运输过程中货物40倾倒的情况。可以理解的,第一防护件21也可以多根防护杆221组成的防护栏,通过栏杆抵挡货物40背面,避免在货物40运输过程中货物40倾倒的情况。
在本申请的一些实施例中,例如对于第一防护件21为防护板211的实施例,如图4所示,防护板211于第一限位面213的表面具有引导第一伸缩件212伸入货物40与防护板211间的避让槽214,当两辆货物40运输装置并排排列时,货物40的背面抵靠在第一防护件21的第一限位面213上,第一伸缩件212通过避让槽214伸入货物40的背面,实现第一防护件21抵挡货物40背面的同时,可以将第一伸缩件212伸入货物40背面,进而在卸货的过程中进行防倾倒保护。
具体的,避让槽214可以为横截面在正方形、长方形、梯形或圆形的凹槽。作为一示例性的,参阅图5,图5示出了本申请实施例中第一防护件21与小车10的一种结构示意图,其中避让槽214为倒梯形凹槽,其中倒梯形凹槽是指梯形的底边处于第一限位面213处,即梯形开口朝向货物40背面,第一伸缩件212的伸缩部分与避让槽214契合,即第一伸缩件212的横截面为梯形,其较宽的底边朝向货物40背面,可以增大第一伸缩件212与货物40背面的接触面积,使得第一伸缩件212更好的对货物40进行防倾倒保护。
值得注意的是,第一伸缩件212可以采用各种伸缩装置实现伸缩功能,例如液压伸缩杆、气压伸缩杆、电动伸缩杆或丝杠伸缩机构等,作为一示例性的,第一伸缩件212包括固定部分和伸缩部分,防护板211的侧面开设有容纳第一伸缩件212的空腔,固定部分位于防护板211的空腔内,伸缩部分自空腔朝向防护板211外部伸缩,使得第一伸缩件212完成隐藏在第一防护件21内部,进而有利于货物搬运装置体积的缩小。
进一步的,为实现对小车10上货物40的两侧进行防倾倒保护,在本申请的一些实施例中,防护组件20还可以包括设置于小车10两侧的第二防护件22,在小车10运输货物40的过程中,由于两侧具有第二防护件22的保护,可以避免货物40向左右两侧倾倒,进一步降低货物搬运装置运输货物40倾倒的风险。
具体的,第二防护件22可以为竖直设置在小车10上的保护板,该保护板的表面朝向小车10的侧面,通过该保护板的板面抵挡货物40两侧,避免在货物40运输过程中货物40倾倒的情况。可以理解的,第二防护件22也可以多根防护杆221组成的防护栏,通过防护栏抵挡货物40侧面,避免在货物40运输过程中货物40向两侧的情况。
为使得在第一伸缩件212伸入货物40背侧后,该货物搬运装置可以通过第二防护件22正常退出,在本申请的一些实施例中,第二防护件22具有使第一伸缩件212横向通过的横向通槽222,以第二防护件22由多根防护杆221组成的防护栏为例,相邻的防护杆221间形成第一伸缩件212通过的横向通槽222。在一些实施例中,为实现第二防护件22的固定,第二防护件22与第一防护件21连接,例如,防护杆221临近第一防护件21的一端与第一防护件21连接。可以理解的,当第二防护件22为防护板时,第二防护件22可以开设多个横向通槽222,以实现第一伸缩件212可以通过第二防护件22的目的。
在本申请的一些实施例中,相邻的横向通槽222间可以具有多根防护杆221,例如如图1所示,相邻的横向通槽222间具有两根防护杆221,进一步的,由于第一防护件21不通过该两根防护杆221,因此还可以使两根防护杆221互相连接,进一步增强防护杆221的结构强度,避免防护杆221无法承受货物40倾倒产生的作用力的情况。
进一步的,在上述实施例实现货物40背侧以及左右两侧防倾倒的基础上,为避免货物40在运输过程向前倾倒,如图4或图5所示,小车10具有向第一防护件21倾斜设置的承载面101,由于承载面101具有向后倾斜的角度,当货物40防止在承载面101上时,货物40向后滑动并抵靠在第一防护件21上,进而避免了货物40向前倾倒的现象。示例性的,承载面101与水平面的夹角可以为5°,但不限于此,例如也可以为5°至10°等。
值得注意的是,上述关于货物搬运装置的说明描述仅为清楚说明本申请的验证过程,本领域技术人员在本申请的指导下,可以对上述装置做出等同的修改设计,例如,货物搬运装置还可以包括通讯装置,以便于与地面的电磁轨道交换信息获取移动、装车或卸车指令。
为了更好的实施上述货物搬运装置,在本申请实施例提供的货物搬运装置的基础之上,本申请还提供一种卸货方法,卸货方法应用于货物搬运系统,货物搬运系统包括至少两辆如上述任一实施例的货物搬运装置,参阅图6,图6示出了本申请实施例中卸货方法的一种流程示意图,其中,卸货方法包括:
步骤S601,控制第一货物搬运装置和第二货物搬运装置到达目的地并排排列,其中,第一货物搬运装置和第二货物搬运装置运载需摆放的货物40;
目的地是指货物40的卸货地点,例如,如图7所示的快递装车场景中,目的地可以为货车车厢、指定的存储地点等,其中需摆放的货物40可以是指堆叠的快递包裹。可以理解的,在进行卸货前,已完成货物40在小车10上的装载过程,具体的,完成货物40的装载可以通过升降机构降下第一货叉11和第二货叉12,然后将第一货叉11和第二货叉12伸入栈板30底部,提升后最终完成货物装载过程。
在本申请的一些实施例中,控制第一货物搬运装置和第二货物搬运装置到达目的地并排排列可以是通过电磁或光学等自动导引装置实现,例如电磁轨道黏贴于地板上,第一货物搬运装置和第二货物搬运装置则依循电磁轨道所带来的讯息进行移动与动作。作为一示例性的,可以先控制第二货物搬运装置移动至目的地,然后控制第一货物搬运装置移动至目的地并与第二货物搬运装置并排;作为另一示例性的,还可以同时控制第一货物搬运装置和第二货物搬运装置并排移动并到达目的地。
步骤602,控制第一货物搬运装置的第一伸缩件212朝向第二货物搬运装置伸出,第一伸缩件212伸入第二货物搬运装置运载的货物40的背面,并对货物40的背面进行防倾保护;
在第一货物搬运装置和第二货物搬运装置到达目的地并排排列后,即可以控制第一货物搬运装置的第一伸缩件212朝向第二货物搬运装置伸出。作为一示例性的,当第一伸缩件212为液压伸缩杆时,则可以控制泵向液压伸缩杆通入液体,进而驱动第一伸缩件212伸缩。可以理解的,第一伸缩件212伸缩的时机可以通过感应装置确定,例如当第一货物搬运装置和第二货物搬运装置移动至目的地,目的地对应地面处的电磁轨道指示第一伸缩件212伸缩,又例如,当第一货物搬运装置和第二货物搬运装置分别设置的激光对射传感器对准后即可控制第一伸缩件212伸缩。
步骤S603,控制第一货物搬运装置和/或第二货物搬运装置移动,以使得第二货物搬运装置完成卸货过程。
第一货物搬运装置的第一伸缩件212朝向第二货物搬运装置伸出后,即可以确定开始第二货物搬运装置的卸货过程。具体的,实现第二货物搬运装置的卸货过程可以包括:
控制第一货物搬运装置沿第一方向移动,第一方向为货物40背面指向货物40正面的方向;和/或者
控制第二货物搬运装置沿第二方向移动,第二方向为货物40正面指向货物40背面的方向。
如图8所示,以第二货物搬运装置移动为例,第一货物搬运装置固定不动,第二货物搬运装置升降机构降下第一货叉11以及第二货叉12,待堆放货物40的栈板30落地后第二货物搬运装置向后移动,第一货叉11以及第二货叉12退出栈板30,完成卸货过程。
作为另一示例性的,如图9所示,第一货物搬运装置移动,第二货物搬运装置固定不动,通过第一货物搬运装置的第一伸缩件212将货物40推下第二货物搬运装置的小车10。作为又一示例性的,如图10所示,还可以第一货物搬运装置和第二货物搬运装置同时沿相反的方向移动,进而通过相对移动将货物40推下第二货物搬运装置的小车10。
在完成第二货物搬运装置卸货过程后,为便于实现第一货物搬运装置防倾倒的卸货过程,在本申请的一些实施例中,方法还包括:
控制第一货物搬运装置和第二货物搬运装置再次并排排列;
控制第二货物搬运装置的第一伸缩件212朝向第一货物搬运装置伸出,第一伸缩件212伸入第一货物搬运装置运载的货物40的背面,并对货物40的背面进行防倾保护;
控制第一货物搬运装置和/或第二货物搬运装置移动,以使得第一货物搬运装置完成卸货过程。
最终通过第一货物搬运装置和第二货物搬运装置协同过程完成卸货过程,使得两辆货物搬运装置卸货完成后均可以正常离开,有效避免了货物搬运装置在货物40转移以及卸货后离开过程货物40摔落损坏的现象。
为了更好实施本申请实施例中货物搬运装置,在货物搬运装置之上,本申请实施例中还提供一种货物搬运系统,货物搬运系统包括控制器、总线以及上述任一实施例中的货物搬运装置,其中:
控制器是该货物搬运系统的控制中心,利用各种接口和线路连接整个系统的各个部分,通过运行或执行存储的程序,执行装置的各种功能,从而对系统进行整体控制,实现货物40搬运过程。可选的,控制器可包括一个或多个处理核心;控制器可以是中央处理单元(Central Processing Unit,CPU),还可以是其他通用控制器、数字信号控制器(DigitalSignal Processor,DSP)、专用集成电路(Application Specific Integrated Circuit,ASIC)、现成可编程门阵列(Field-Programmable Gate Array,FPGA)或者其他可编程逻辑器件、分立门或者晶体管逻辑器件、分立硬件组件、采用可编程逻辑控制器(PLC控制器)等。
总线是该货物搬运系统的通信网络,使得系统各部分之间可以进行通讯,以促进信息和/或数据的传输。可选的,工业通讯网络可以包括有线通信,例如现场总线、工业以太网、工业互联网(TSN)等,还可以包括无线通信,例如窄带物联网(Narrow Band Internetof Things,NB-IoT)等。
货物搬运装置是执行货物40搬运过程的设备,货物搬运装置通过总线与控制器连接,以接收控制器发出的控制指令。具体的,货物搬运装置包括小车10,小车10下方安装有移动轮13,小车10用于搭载需运输的货物40;防护组件20,防护组件20包括围绕小车10背侧的第一防护件21,第一防护件21上设有可伸缩的第一伸缩件212,第一伸缩件212朝向小车10侧面伸缩,以在另外一辆货物搬运装置卸货时第一伸缩件212伸入货物40的背面,并对货物40的背面进行防倾保护。
值得注意的是,上述关于货物搬运系统的说明描述仅为清楚说明本申请的验证过程,本领域技术人员在本申请的指导下,可以对上述系统做出等同的修改设计,例如,货物搬运系统还可以包括显示器,以显示各个货物搬运装置的位置、电量、载重量等。
在上述实施例中,对各个实施例的描述都各有侧重,某个实施例中没有详述的部分,可以参见上文针对其他实施例的详细描述,此处不再赘述。
上文已对基本概念做了描述,显然,对于本领域技术人员来说,上述详细披露仅仅作为示例,而并不构成对本申请的限定。虽然此处并没有明确说明,本领域技术人员可能会对本申请进行各种修改、改进和修正。该类修改、改进和修正在本申请中被建议,所以该类修改、改进、修正仍属于本申请示范实施例的精神和范围。
同时,本申请使用了特定词语来描述本申请的实施例。如“一个实施例”、“一实施例”、和/或“一些实施例”意指与本申请至少一个实施例相关的某一特征、结构或特点。因此,应强调并注意的是,本说明书中在不同位置两次或多次提及的“一实施例”或“一个实施例”或“一个替代性实施例”并不一定是指同一实施例。此外,本申请的一个或多个实施例中的某些特征、结构或特点可以进行适当的组合。
应当注意的是,为了简化本申请披露的表述,从而帮助对一个或多个申请实施例的理解,前文对本申请实施例的描述中,有时会将多种特征归并至一个实施例、附图或对其的描述中。但是,这种披露方法并不意味着本申请对象所需要的特征比权利要求中提及的特征多。实际上,实施例的特征要少于上述披露的单个实施例的全部特征。
以上对本申请实施例所提供的一种货物搬运装置、货物搬运系统以及卸货方法进行了详细介绍,本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处,综上,本说明书内容不应理解为对本发明的限制。
Claims (10)
1.一种货物搬运装置,其特征在于,包括:
小车,所述小车具有承载货物的承载面;
防护组件,所述防护组件固定在所述小车上,用于对位于所述承载面上的货物进行限位,所述防护组件包括位于所述承载面至少一侧的第一防护件和固定于所述第一防护件上的第一伸缩件,所述第一防护件朝向所述货物的一侧形成第一限位面,所述第一伸缩件具有伸缩方向,所述伸缩方向与所述第一限位面平行设置,且所述伸缩方向具有与所述承载面平行的分量。
2.如权利要求1所述的货物搬运装置,其特征在于,所述第一防护件为防护板,所述防护板朝向所述货物的一面形成所述第一限位面,所述防护板于所述第一限位面的表面具有引导所述第一伸缩件伸入所述货物与所述防护板间的避让槽。
3.如权利要求2所述的货物搬运装置,其特征在于,所述第一伸缩件包括固定部分和伸缩部分,所述防护板的侧面开设有容纳所述第一伸缩件的空腔,所述固定部分位于所述防护板的所述空腔内,所述伸缩部分自所述空腔朝向所述防护板外部伸缩。
4.如权利要求1所述的货物搬运装置,其特征在于,所述防护组件还包括朝向所述货物两侧设置的第二防护件;
所述第二防护件具有使所述第一伸缩件横向通过的横向通槽,所述第二防护件与所述第一防护件连接。
5.如权利要求4所述的货物搬运装置,其特征在于,所述第二防护件包括多根水平布置的防护杆,所述防护杆临近所述第一防护件的一端与所述第一防护件连接,相邻的所述防护杆间形成所述第一伸缩件通过的所述横向通槽。
6.如权利要求1所述的货物搬运装置,其特征在于,所述小车包括第一货叉和第二货叉,所述第一货叉与所述第二货叉间具有卸货槽。
7.如权利要求1至6任一项所述的货物搬运装置,其特征在于,所述承载面为倾斜设置的斜面,所述承载面与水平面的夹角为5°~10°。
8.一种货物搬运系统,其特征在于,所述系统包括:至少两辆如权利要求1至7任一项所述货物搬运装置以及控制器,所述货物搬运装置与所述控制器通讯连接。
9.一种卸货方法,其特征在于,所述方法包括:
控制第一货物搬运装置和第二货物搬运装置到达目的地并排排列,其中,所述第一货物搬运装置和所述第二货物搬运装置运载需摆放的货物;
控制所述第一货物搬运装置的第一伸缩件朝向所述第二货物搬运装置伸出,所述第一伸缩件伸入所述第二货物搬运装置运载的所述货物的背面,并对所述货物的背面进行防倾保护;
控制所述第二货物搬运装置移动,以使得所述第二货物搬运装置完成卸货过程。
10.如权利要求9所述的卸货方法,其特征在于,在所述第二货物搬运装置完成卸货过程后,所述方法还包括:
控制所述第一货物搬运装置和所述第二货物搬运装置再次并排排列;
控制所述第二货物搬运装置的第一伸缩件朝向所述第一货物搬运装置伸出,所述第一伸缩件伸入所述第一货物搬运装置运载的所述货物的背面,并对所述货物的背面进行防倾保护;
控制所述第一货物搬运装置移动,以使得所述第一货物搬运装置完成卸货过程。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202110323798.3A CN115123761B (zh) | 2021-03-26 | 2021-03-26 | 货物搬运装置、货物搬运系统以及卸货方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202110323798.3A CN115123761B (zh) | 2021-03-26 | 2021-03-26 | 货物搬运装置、货物搬运系统以及卸货方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN115123761A true CN115123761A (zh) | 2022-09-30 |
| CN115123761B CN115123761B (zh) | 2024-08-20 |
Family
ID=83374864
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202110323798.3A Active CN115123761B (zh) | 2021-03-26 | 2021-03-26 | 货物搬运装置、货物搬运系统以及卸货方法 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN115123761B (zh) |
Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09132328A (ja) * | 1995-11-09 | 1997-05-20 | Daifuku Co Ltd | 荷積み卸し設備 |
| JP2001270619A (ja) * | 2000-03-27 | 2001-10-02 | Kawasaki Heavy Ind Ltd | 荷物搬送台車装置とその荷物積込方法 |
| EP2428428A1 (de) * | 2010-09-14 | 2012-03-14 | Werner Feil GmbH | Transportgerät |
| CN206606993U (zh) * | 2017-04-10 | 2017-11-03 | 林德(中国)叉车有限公司 | 一种具有侧面防护功能的托盘搬运车 |
| CN107337153A (zh) * | 2017-07-31 | 2017-11-10 | 盐城晟阳电子科技有限公司 | 一种激光导航叉车 |
| CN109625123A (zh) * | 2018-12-25 | 2019-04-16 | 中国科学院深圳先进技术研究院 | 一种拼接式搬运车辆、搬运系统和搬运方法 |
| CN208768002U (zh) * | 2018-09-03 | 2019-04-19 | 福州英迪特智能科技有限公司 | 一种新型直流调速装置柜体组装结构 |
| CN209650339U (zh) * | 2019-03-22 | 2019-11-19 | 宿迁澳中玻璃有限公司 | 一种玻璃幕墙运输车 |
| CN210214723U (zh) * | 2019-06-28 | 2020-03-31 | 昆山同日工业自动化有限公司 | 一种agv搬运车 |
| CN112047004A (zh) * | 2020-08-14 | 2020-12-08 | 许郑 | 一种用于物流运输的组合型输送系统及其工作方法 |
| CN212769672U (zh) * | 2020-07-22 | 2021-03-23 | 苏州冠鸿智能装备有限公司 | 激光slam导航高效窄巷道前支腿型叉车agv |
-
2021
- 2021-03-26 CN CN202110323798.3A patent/CN115123761B/zh active Active
Patent Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09132328A (ja) * | 1995-11-09 | 1997-05-20 | Daifuku Co Ltd | 荷積み卸し設備 |
| JP2001270619A (ja) * | 2000-03-27 | 2001-10-02 | Kawasaki Heavy Ind Ltd | 荷物搬送台車装置とその荷物積込方法 |
| EP2428428A1 (de) * | 2010-09-14 | 2012-03-14 | Werner Feil GmbH | Transportgerät |
| CN206606993U (zh) * | 2017-04-10 | 2017-11-03 | 林德(中国)叉车有限公司 | 一种具有侧面防护功能的托盘搬运车 |
| CN107337153A (zh) * | 2017-07-31 | 2017-11-10 | 盐城晟阳电子科技有限公司 | 一种激光导航叉车 |
| CN208768002U (zh) * | 2018-09-03 | 2019-04-19 | 福州英迪特智能科技有限公司 | 一种新型直流调速装置柜体组装结构 |
| CN109625123A (zh) * | 2018-12-25 | 2019-04-16 | 中国科学院深圳先进技术研究院 | 一种拼接式搬运车辆、搬运系统和搬运方法 |
| CN209650339U (zh) * | 2019-03-22 | 2019-11-19 | 宿迁澳中玻璃有限公司 | 一种玻璃幕墙运输车 |
| CN210214723U (zh) * | 2019-06-28 | 2020-03-31 | 昆山同日工业自动化有限公司 | 一种agv搬运车 |
| CN212769672U (zh) * | 2020-07-22 | 2021-03-23 | 苏州冠鸿智能装备有限公司 | 激光slam导航高效窄巷道前支腿型叉车agv |
| CN112047004A (zh) * | 2020-08-14 | 2020-12-08 | 许郑 | 一种用于物流运输的组合型输送系统及其工作方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN115123761B (zh) | 2024-08-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN110422540B (zh) | 一种自动引导运输车和一种仓储系统 | |
| CN110451153B (zh) | 一种货架和一种仓储系统 | |
| US12391494B2 (en) | Loading system for loading and unloading trucks | |
| CN217498014U (zh) | 装卸车系统 | |
| CN105324325A (zh) | 用于将袋装松散材料装载至道路运输车辆的设备和方法 | |
| US12297059B2 (en) | Loading system for loading and unloading trucks with pallets in transverse direction | |
| CN108045405A (zh) | 自行式集装箱搬运系统 | |
| JP6909217B2 (ja) | コンテナ用輸送車両 | |
| CN110002362B (zh) | 自动装车设备及其装卸方法 | |
| CN220485245U (zh) | 便携式堆高车 | |
| JP2868964B2 (ja) | 自動倉庫の入出庫設備及びそれを使っての入出庫方法 | |
| CN119706683B (zh) | 一种堆垛叠垛搬运车及应用 | |
| JP4664747B2 (ja) | 搬送物搬送方法 | |
| CN115123761A (zh) | 货物搬运装置、货物搬运系统以及卸货方法 | |
| US3669290A (en) | Container handling vehicle | |
| CN107650757B (zh) | 一种便捷上货、卸货的agv小车 | |
| CN113753510B (zh) | 一种高效且占地面积小的全自动装卸系统 | |
| JP2016183476A (ja) | 駐車設備及び入出庫方法 | |
| JP5495277B2 (ja) | 自動倉庫システム | |
| JP7047170B1 (ja) | 台車搬送用パレット | |
| US20190276290A1 (en) | Apparatus and method for transporting an object | |
| CN116495514A (zh) | 一种集装箱托盘装车机及装车方法 | |
| JPH06100117A (ja) | 流動棚の入出庫制御装置 | |
| EP0462938B1 (en) | A system for loading trucks or containers automatically or semiautomatically with freight units of palletizable or at least regular shape and size | |
| CN117509489B (zh) | 一种高稳定性物流搬运叉车 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |