CN115727770A - 一种基于散斑剪切干涉的计量曲面物体离面位移方法 - Google Patents
一种基于散斑剪切干涉的计量曲面物体离面位移方法 Download PDFInfo
- Publication number
- CN115727770A CN115727770A CN202211454063.5A CN202211454063A CN115727770A CN 115727770 A CN115727770 A CN 115727770A CN 202211454063 A CN202211454063 A CN 202211454063A CN 115727770 A CN115727770 A CN 115727770A
- Authority
- CN
- China
- Prior art keywords
- phase
- speckle
- plane displacement
- measured
- ccd camera
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images








Landscapes
- Length Measuring Devices By Optical Means (AREA)
Abstract
本发明涉及一种基于散斑剪切干涉的计量曲面物体离面位移方法,步骤包括:1、获被测物调制后的正弦条纹图并进行灰度处理;2、得到绝对相位信息,获取物体相对相机的三维坐标,获取物体相对相机的三维坐标;3、计算出被测物表面法向量相对CCD相机光轴的夹角 ;4、采集被测物表面变形前后的散斑包裹相位图并进行灰度处理和滤波处理;5、计算所测得的表面离面位移信息;6、建立激光散斑所测的离面位移测量值与被测物体表面实际变形的离面位移
;4、采集被测物表面变形前后的散斑包裹相位图并进行灰度处理和滤波处理;5、计算所测得的表面离面位移信息;6、建立激光散斑所测的离面位移测量值与被测物体表面实际变形的离面位移 之间的几何关系;7、求得实际的离面位移
之间的几何关系;7、求得实际的离面位移 ;本发明采用剪切散斑干涉与数字条纹投影相结合,以检测出曲面(斜面)物体内部缺陷的同时,并能获取其离面位移信息用于分析其缺陷属性,有利于曲面物体内部缺陷属性的评估。
;本发明采用剪切散斑干涉与数字条纹投影相结合,以检测出曲面(斜面)物体内部缺陷的同时,并能获取其离面位移信息用于分析其缺陷属性,有利于曲面物体内部缺陷属性的评估。
Description
技术领域
本发明设计光学测量检测领域,具体涉及一种基于散斑剪切干涉的计量曲面物体离面位移方法。
背景技术
激光散斑剪切干涉技术作为光测力学技术,具有高精度、非接触、全场、实时测量等特点,其优异的抗震性能使其广泛应用在位移测量、应变测量、震动测量、变形测量、温度测量以及工程材料的内部缺陷检测等领域,利用激光散斑剪切技术测量因内部缺陷引起的面外变形量来间接获取缺陷属性是对材料性能判断的方法之一。
激光散斑剪切干涉技术通过采集被测物形变前后的散斑图做差处理得到离面位移,该离面位移是沿相机光轴方向,对于曲面(斜面)物体的离面位移测量,被测物体每点的变形方向不一定平行于光轴,所测得的离面位移并不是曲面每点实际的变形量。上海大学李晓东等人通过构建三种波长不同的激光测量光路,使用一台CCD彩色相机一次记录三种光路获得的散斑干涉图像来测量物体的三维变形,但该方法光路复杂,同时需要多种激光光源,操作较为繁琐;山东师范大学孙勇明等人将数字散斑相关法和电子散斑干涉术结合在一起测量物体的三维变形,该方法只能测量平面物体的三维变形;上海交通大学李鹏飞等人,利用激光散斑偏转法求取曲面物体的三维形貌,并结合曲面变形前后的散斑图获得离面形变信息,但是该方法需要高精度的光源偏转仪器,抗干扰性能较差。
因此,提出一种通过抗干扰性能强的三维形貌和离面形变的组合测量,得到对曲面、斜面的面外形变的计量方法具有十分重要的意义。
发明内容
针对上述现有问题,本发明提供了一种基于散斑剪切干涉的计量曲面物体离面位移方法,采用剪切散斑干涉与数字条纹投影相结合,以检测出曲面(斜面)物体内部缺陷的同时,并能获取其离面位移信息用于分析其缺陷属性。
为了实现上述目的,本发明采用的技术方案为:
一种基于散斑剪切干涉的计量曲面物体离面位移方法,包括如下步骤:
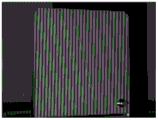
S1、投影仪投出正弦条纹到被测物表面,由CCD相机采集受被测物调制后的正弦条纹图并进行灰度处理;
S2、利用相移法对CCD相机采集的受调制的投影条纹图像提取包裹相位,结合多频外插法进行解包裹计算,得到绝对相位信息,获取物体相对相机的三维坐标,结合相机与标定的投影系统参数求取物体相对相机的三维坐标;
S3、利用PCL(Point Cloud Learning)对重建的点云数据集中的三维模型进行法向量估计,并计算出被测物表面法向量相对CCD相机光轴的夹角 ;
;
S4、激光器投射激光到被测物表面,通过对被测物施加外部载荷,由CCD相机分别采集被测物表面变形前后的散斑包裹相位图并进行灰度处理和滤波处理;
S5、利用相移法对CCD相机采集的散斑包裹相位图提取相位,并利用最小二乘解包裹算法对散斑包裹相位图进行相位展开,获得解包后相位分布信息,代入波长、剪切量等参数计算得到所测得的表面离面位移信息(即光程差 );
);
S6、建立激光散斑所测的离面位移测量值(即光程差 )与被测物体表面实际变形的离面位移值
)与被测物体表面实际变形的离面位移值 之间的几何关系;
之间的几何关系;
S7、根据S6中的几何关系,利用被测物体表面法向量相对CCD相机光轴的夹角 对散斑剪切干涉所测得的离面位移信息进行修正,求得实际的离面位移
对散斑剪切干涉所测得的离面位移信息进行修正,求得实际的离面位移 。
。
作为优选的技术方案:
如上所述的一种基于散斑剪切干涉的计量曲面物体离面位移方法,在步骤S2中,求解绝对相位信息的过程如下:
相机采集的相位条纹图的数学表达式为:

式中, 为条纹光强,
为条纹光强, 为图像像素坐标,
为图像像素坐标, 为背景光强分布,
为背景光强分布, 为光强调制度,
为光强调制度, 为待求相位,
为待求相位, 为相移量,其中
为相移量,其中 。
。
使用相移法求取相位 ,解得:
,解得:
利用多频外插方法对其相位展开得到绝对相位 ,相位分布与高度关系为:
,相位分布与高度关系为:

式中: 为物体的高度信息分布,
为物体的高度信息分布, 为被测物的相位变化量,
为被测物的相位变化量, 为相机光心到参考平面的距离,
为相机光心到参考平面的距离, 为投影仪光源到相机光心的距离,
为投影仪光源到相机光心的距离, 为投影条纹间距。
为投影条纹间距。
如上所述的一种基于散斑剪切干涉的计量曲面物体离面位移方法,在步骤S3中,对点云数据集进行法向量估计,基于局部平面拟合,创建任一点临近元素的协方差矩阵,求其最小特征值对应的特征向量即为该局部平面法向量 ;对于每一个点
;对于每一个点 ,其对应的协方差矩阵
,其对应的协方差矩阵 为:
为:

式中, 是点
是点 邻近点的数目,
邻近点的数目, 表示最邻近元素的三维质心,
表示最邻近元素的三维质心, 分别表示为协方差矩阵的第
分别表示为协方差矩阵的第 个特征值和特征向量,当法向方向朝相机方向时,满足
个特征值和特征向量,当法向方向朝相机方向时,满足 ,
, 为点云数据集的视点。
为点云数据集的视点。
如上所述的一种基于散斑剪切干涉的计量曲面物体离面位移方法,在步骤S3中,计算被测物表面法向量相对CCD相机光轴的夹角 :
:

式中, 为被测物表面法向量,
为被测物表面法向量, 为CCD相机光轴方向的单位向量。
为CCD相机光轴方向的单位向量。
如上所述的一种基于散斑剪切干涉的计量曲面物体离面位移方法,在步骤S5中,通过对散斑包裹相位图进行解包裹计算,得到相位分布信息 和离面位移导数
和离面位移导数 (
( 方向剪切)之间的关系:
方向剪切)之间的关系:

对其积分求解离面位移即光程差 ;
;
式中, 为沿
为沿 方向的剪切量,
方向的剪切量, 为CCD相机与光源的夹角,
为CCD相机与光源的夹角, 为激光波长。
为激光波长。
如上所述的一种基于散斑剪切干涉的计量曲面物体离面位移方法,在步骤S6中,激光剪切散斑法测量离面位移信息是将变化前后的相位信息进行相减,得到光轴方向的离面位移信息(即光程差),而物体发生微小离面形变时其方向是沿表面法向量方向,故所测得光程差 与实际变形量
与实际变形量 之间的关系为:
之间的关系为:

如上所述的一种基于散斑剪切干涉的计量曲面物体离面位移方法,在步骤S5中,对散斑包裹相位图进行解包裹计算的过程为:
变形前的散斑图的光强表达式为 ,
,

变形后的光强表达式 为:
为:

将变形前后的条纹图进行相减得到四幅相位包裹图 ,
,

根据四部相移原理,得到变形前后相位变化量:
需要对其进行解包裹处理得到展开相位图,得到相位分布信息 和离面位移导数
和离面位移导数 (
( 方向剪切)之间的关系为:
方向剪切)之间的关系为:

对其积分求解离面位移即光程差 。
。
如上所述的一种基于散斑剪切干涉的计量曲面物体离面位移方法,在步骤S1和S4中,均由同一CCD相机(或光轴平行的两组CCD相机)分别获取被调制的正弦条纹图和散斑包裹相位图,投影仪投出正弦条纹到被测物体表面,光路经由透镜、剪切干涉系统被CCD相机采集,此时剪切干涉系统未处于干涉状态,计算机模块处理得到被测物的三维信息,激光发生器发出的激光阵列经扩束装置后照射在被测物表面,光路由剪切干涉系统分为两束光在空间上形成干涉,由CCD相机采集到散斑包裹相位图。
本发明还提供一种用于实现上述方法的复用光路系统,如图2所示,所述系统包括扩束镜、投影仪、剪切干涉仪、CCD相机、激光器发生器、计算机模块、反光镜、调节镜、相移器,所述计算机能够控制投影仪和激光器发生器向被测物体表面投影相移编码条纹和激光;所述CCD相机用于捕获被测物表面放射形成的图像,发送给所述计算机生成调制图片组并排序,所述计算机还用于对所述的调制图像进行相位展开,实现对被测物体表面的点云数据重建和被测物表面的离面变形重构,利用点云数据获取被测物表面法向量与光轴的夹角来对离面位移值进行修正。
与现有技术相比,本发明的有益效果为:
本发明通过结合面结构光的三维测量和剪切散斑干涉的离面位移测量技术,控制调节镜来实现面结构光与剪切散斑系统的切换,能够实现对三维形貌和离面形变的组合测量,将三维形貌的法向量信息引入离面位移的测量中,实现测量曲面物体的离面位移信息,本发明具有结构简单、能够实现快速测量、抗干扰能力强,能够实现全场、非接触测量。
附图说明
图1为本发明的方法流程示意图;
图2为本发明的离面位移测量方法中的装置及光路系统示意图;
图3为被测物体变形时离面位移与CCD相机所测离面位移的几何关系示意图;
图4为CCD相机采集的条纹光栅图;
图5为重建被测物体的三维点云图;
图6为加载变形的散斑包裹相位图;
图7为对散斑包裹相位图解包裹得到的相位图;
图8为激光散斑测得的离面位移信息;
图9为修正后的离面位移信息;
图中:1-激光发生器,2-扩束镜,3-被测物表面,4-投影仪,5-计算机模块,6-CCD相机,7-剪切干涉仪,8-反光镜,9-调节镜,10-相移器。
具体实施方式
下面结合具体实施方式,进一步阐述本发明。应理解,这些实施例仅用于说明本发明而不用于限制本发明的范围。此外应理解,在阅读了本发明讲授的内容之后,本领域技术人员可以对本发明作各种改动或修改,这些等价形式同样落于本申请所附权利要求书所限定的范围。
一种基于散斑剪切干涉的计量曲面物体离面位移方法,如图1所示,步骤如下:
S1、投影仪4投影光栅条纹到被测物体3上,调节调节镜9使剪切干涉仪7不处于干涉状态,CCD相机6采集受被测物调制后的正弦条纹图并进行灰度处理;
S2、计算机模块5通过相移法对CCD相机采集的受调制的投影条纹图像提取包裹相位,结合多频外插法进行解包裹计算,得到绝对相位信息,计算机模块5结合相机与标定的投影系统参数求取物体相对相机的三维坐标;
其中,求解绝对相位信息的过程如下:
相机采集的相位条纹图的数学表达式为:

式中, 为条纹光强,
为条纹光强, 为图像像素坐标,
为图像像素坐标, 为背景光强分布,
为背景光强分布, 为光强调制度,
为光强调制度, 为待求相位,
为待求相位, 为相移量,其中
为相移量,其中 ;
;
使用相移法求取相位 ,解得:
,解得:
利用多频外插方法对其相位展开得到绝对相位 ,相位分布与高度关系为:
,相位分布与高度关系为:
式中: 为物体的高度信息分布,
为物体的高度信息分布, 为被测物的相位变化量,
为被测物的相位变化量, 为相机光心到参考平面的距离,
为相机光心到参考平面的距离, 为投影仪光源到相机光心的距离,
为投影仪光源到相机光心的距离, 为投影条纹间距;
为投影条纹间距;
S3、利用PCL(Point Cloud Learning)对重建的点云数据集中的三维模型进行法向量估计,并计算出被测物表面法向量相对CCD相机光轴的夹角 ;
;
其中,法向量估计方法为:对点云数据集进行法向量估计,基于局部平面拟合,创建任一点临近元素的协方差矩阵,求其最小特征值对应的特征向量即为该局部平面法向量 ;对于每一个点
;对于每一个点 ,其对应的协方差矩阵
,其对应的协方差矩阵 为:
为:

式中, 是点
是点 邻近点的数目,
邻近点的数目, 表示最邻近元素的三维质心,
表示最邻近元素的三维质心, 分别表示为协方差矩阵的第
分别表示为协方差矩阵的第 个特征值和特征向量,当法向方向朝相机方向时,满足
个特征值和特征向量,当法向方向朝相机方向时,满足 ,
, 为点云数据集的视点;
为点云数据集的视点;
计算被测物表面法向量相对CCD相机光轴的夹角 为:
为:

式中, 为被测物表面法向量,
为被测物表面法向量, 为CCD相机光轴方向的单位向量;
为CCD相机光轴方向的单位向量;
S4、激光发生器1投射激光到被测物表面3,通过对被测物施加外部载荷,由CCD相机分别采集被测物表面变形前后的散斑包裹相位图并进行灰度处理和滤波处理;
S5、计算机模块5利用相移法对CCD相机采集的散斑包裹相位图提取相位,并利用最小二乘解包裹算法对散斑包裹相位图进行相位展开,获得解包后相位分布信息,代入波长、剪切量等参数计算得到所测得的表面离面位移信息(即光程差 );
);
其中,通过对散斑包裹相位图进行解包裹计算,
对散斑包裹相位图进行解包裹计算的过程为:
变形前的散斑图的光强表达式为 ,
,

变形后的光强表达式 为:
为:

将变形前后的条纹图进行相减得到四幅相位包裹图 ,
,

根据四部相移原理,得到变形前后相位变化量:
需要对其进行解包裹处理得到展开相位图,得到相位分布信息 和离面位移导数
和离面位移导数 (
( 方向剪切)之间的关系为:
方向剪切)之间的关系为:

对其积分求解离面位移即光程差 ;
;
式中, 为沿
为沿 方向的剪切量,
方向的剪切量, 为CCD相机与光源的夹角,
为CCD相机与光源的夹角, 为激光波长;
为激光波长;
S6、建立激光散斑所测的离面位移测量值(即光程差 )与被测物体表面实际变形的离面位移
)与被测物体表面实际变形的离面位移 之间的几何关系;
之间的几何关系;
其中,激光剪切散斑法测量离面位移信息是将变化前后的相位信息进行相减,得到光轴方向的离面位移信息(即光程差),而物体发生微小离面形变时其方向是沿表面法向量方向,故所测得光程差 与实际变形量
与实际变形量 之间的关系为:
之间的关系为:

S7、根据S6中的几何关系,利用被测物体表面法向量相对CCD相机光轴的夹角 对散斑剪切干涉所测得的离面位移信息进行修正,得到修正离面位移
对散斑剪切干涉所测得的离面位移信息进行修正,得到修正离面位移
在步骤S1和S4,中均由同一CCD相机(或光轴平行的两组CCD相机)分别获取被调制的正弦条纹图和散斑包裹相位图,投影仪投出正弦条纹到被测物体表面,光路经由透镜、剪切干涉系统被CCD相机采集,此时剪切干涉系统未处于干涉状态,计算机模块处理得到被测物的三维信息,激光发生器发出的激光阵列经扩束装置后照射在被测物表面,光路由剪切干涉系统分为两束光在空间上形成干涉,由CCD相机采集到散斑包裹相位图。
虽然本发明所揭露的实施方式如上,但所述的内容只是为了便于理解本发明而采用的实施方式,并非用以限定本发明。任何本发明所属技术领域内的技术人员,在不脱离本发明所揭露的精神和范围的前提下,可以在实施的形式及细节上作任何的修改与变化,但本发明的专利保护范围,仍须以所附的权利要求书所界定的范围为准。
Claims (8)
1.一种基于散斑剪切干涉的计量曲面物体离面位移方法,其特征在于,包括如下步骤:
S1、投影仪投出正弦条纹到被测物表面,由CCD相机采集受被测物调制后的正弦条纹图并进行灰度处理;
S2、利用相移法对CCD相机采集的受调制的投影条纹图像提取包裹相位,结合多频外插法进行解包裹计算,得到绝对相位信息,获取物体相对相机的三维坐标;
S3、利用PCL(Point Cloud Learning)对重建的点云数据集中的三维模型进行法向量估计,并计算出被测物表面法向量相对CCD相机光轴的夹角 ;
;
S4、激光器投射激光到被测物表面,通过对被测物施加外部载荷,由CCD相机分别采集被测物表面变形前后的散斑包裹相位图并进行灰度处理和滤波处理;
S5、利用相移法对CCD相机采集的散斑包裹相位图提取相位,并利用最小二乘解包裹算法对散斑包裹相位图进行相位展开,获得解包后相位分布信息,代入波长、剪切量等参数计算得到所测得的表面离面位移信息(即光程差 );
);
S6、建立激光散斑所测的离面位移测量值(即光程差 )与被测物体表面实际变形的离面位移
)与被测物体表面实际变形的离面位移 之间的几何关系;
之间的几何关系;
S7、根据S6中的几何关系,利用被测物体表面法向量相对CCD相机光轴的夹角 对散斑剪切干涉所测得的离面位移进行修正,求得实际的离面位移
对散斑剪切干涉所测得的离面位移进行修正,求得实际的离面位移 。
。
2.根据权力要求1所述的一种基于散斑剪切干涉的计量曲面物体离面位移方法,其特征在于,所述步骤S2中,求解绝对相位信息的过程如下:
相机采集的相位条纹图的数学表达式为:

式中, 为条纹光强,
为条纹光强, 为图像像素坐标,
为图像像素坐标, 为背景光强分布,
为背景光强分布, 为光强调制度,
为光强调制度, 为待求相位,
为待求相位, 为相移量,其中
为相移量,其中 ;
;
使用相移法求取相位 ,解得:
,解得:
利用多频外插方法对其相位展开得到绝对相位 ,相位分布与高度关系为:
,相位分布与高度关系为:

式中: 为物体的高度信息分布,
为物体的高度信息分布, 为被测物的相位变化量,
为被测物的相位变化量, 为相机光心到参考平面的距离,
为相机光心到参考平面的距离, 为投影仪光源到相机光心的距离,
为投影仪光源到相机光心的距离, 为投影条纹间距。
为投影条纹间距。
3.根据权力要求1所述的一种基于散斑剪切干涉的计量曲面物体离面位移方法,其特征在于,所述步骤S3中,对点云数据集进行法向量估计,基于局部平面拟合,创建任一点临近元素的协方差矩阵,求其最小特征值对应的特征向量即为该局部平面法向量 ;对于每一个点
;对于每一个点 ,其对应的协方差矩阵
,其对应的协方差矩阵 为:
为:


式中, 是点
是点 邻近点的数目,
邻近点的数目, 表示最邻近元素的三维质心,
表示最邻近元素的三维质心, 分别表示为协方差矩阵的第
分别表示为协方差矩阵的第 个特征值和特征向量,当法向方向朝相机方向时,满足
个特征值和特征向量,当法向方向朝相机方向时,满足 ,
, 为点云数据集的视点。
为点云数据集的视点。
4.根据权力要求1所述的一种基于散斑剪切干涉的计量曲面物体离面位移方法,其特征在于,所述步骤S3中,计算被测物表面法向量相对CCD相机光轴的夹角 :
:

式中, 为被测物表面法向量,
为被测物表面法向量, 为CCD相机光轴方向的单位向量。
为CCD相机光轴方向的单位向量。
5.根据权利要求1所述的一种基于散斑剪切干涉的计量曲面物体离面位移方法,其特征在于,所述步骤S5中,通过对散斑包裹相位图进行解包裹计算,得到相位分布信息 和离面位移导数
和离面位移导数 (
( 方向剪切)之间的关系:
方向剪切)之间的关系:
对其积分求解离面位移即光程差 ;
;
式中, 为沿
为沿 方向的剪切量,
方向的剪切量, 为CCD相机与光源的夹角,
为CCD相机与光源的夹角, 为激光波长。
为激光波长。
6.根据权利要求1所述一种基于散斑剪切干涉的计量曲面物体离面位移方法,其特征在于,所述步骤S6中,激光剪切散斑法测量离面位移信息是将变化前后的相位信息进行相减,得到光轴方向的离面位移信息(即光程差),而物体发生微小离面形变时其方向是沿表面法向量方向,故所测得光程差 与实际变形量
与实际变形量 之间的关系为:
之间的关系为:

7.根据权利要求5所述的一种基于散斑剪切干涉的计量曲面物体离面位移方法,其特征在于,所述步骤S5中,对散斑包裹相位图进行解包裹计算的过程为:
变形前的散斑图的光强表达式为 ,
,
变形后的光强表达式 为:
为:

将变形前后的条纹图进行相减得到四幅相位包裹图 ,
,

根据四部相移原理,得到变形前后相位变化量:

需要对其进行解包裹处理得到展开相位图,得到相位分布信息 和离面位移导数
和离面位移导数 (
( 方向剪切)之间的关系为:
方向剪切)之间的关系为:
对其积分求解离面位移即光程差 。
。
8.根据权利要求1所述一种基于散斑剪切干涉的计量曲面物体离面位移方法,其特征在于,所述步骤S1和S4,中均由同一CCD相机(或光轴平行的两组CCD相机)分别获取被调制的正弦条纹图和散斑包裹相位图,投影仪投出正弦条纹到被测物体表面,光路经由透镜、剪切干涉系统被CCD相机采集,此时剪切干涉系统未处于干涉状态,计算机模块处理得到被测物的三维信息,激光发生器发出的激光阵列经扩束装置后照射在被测物表面,光路由剪切干涉系统分为两束光在空间上形成干涉,由CCD相机采集到散斑包裹相位图。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202211454063.5A CN115727770B (zh) | 2022-11-21 | 2022-11-21 | 一种基于散斑剪切干涉的计量曲面物体离面位移方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202211454063.5A CN115727770B (zh) | 2022-11-21 | 2022-11-21 | 一种基于散斑剪切干涉的计量曲面物体离面位移方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN115727770A true CN115727770A (zh) | 2023-03-03 |
| CN115727770B CN115727770B (zh) | 2025-10-14 |
Family
ID=85296915
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202211454063.5A Active CN115727770B (zh) | 2022-11-21 | 2022-11-21 | 一种基于散斑剪切干涉的计量曲面物体离面位移方法 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN115727770B (zh) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN116429680A (zh) * | 2023-03-31 | 2023-07-14 | 北京京仪自动化装备技术股份有限公司 | 粘附力测量系统、方法及电子设备 |
| CN120160551A (zh) * | 2025-02-20 | 2025-06-17 | 华中科技大学 | 一种基于背景纹影的电子封装翘曲检测方法及系统 |
| CN120871411A (zh) * | 2025-09-22 | 2025-10-31 | 苏州大学 | 一种干涉条纹生成元件、生成装置以及缺陷检测方法 |
| CN121409130A (zh) * | 2025-12-26 | 2026-01-27 | 深圳北理莫斯科大学 | 变形测量方法、装置和电子设备 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003139515A (ja) * | 2001-11-02 | 2003-05-14 | Fukuoka Prefecture | スペックルを利用した変形量の絶対値計測方法 |
| CN1916563A (zh) * | 2005-08-19 | 2007-02-21 | 韩国轮胎株式会社 | 利用激光散斑剪切干涉法的轮胎触地形状测量装置 |
| CN106226313A (zh) * | 2016-07-01 | 2016-12-14 | 华南理工大学 | 一种基于散斑剪切干涉的缺陷深度检测方法 |
| CN108106556A (zh) * | 2018-02-02 | 2018-06-01 | 上海交通大学 | 基于数字散斑干涉的曲面物体离面形变测量方法及装置 |
| CN114527129A (zh) * | 2021-12-10 | 2022-05-24 | 桂林电子科技大学 | 基于剪切散斑干涉的小型工件内部缺陷检测装置及方法 |
-
2022
- 2022-11-21 CN CN202211454063.5A patent/CN115727770B/zh active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003139515A (ja) * | 2001-11-02 | 2003-05-14 | Fukuoka Prefecture | スペックルを利用した変形量の絶対値計測方法 |
| CN1916563A (zh) * | 2005-08-19 | 2007-02-21 | 韩国轮胎株式会社 | 利用激光散斑剪切干涉法的轮胎触地形状测量装置 |
| CN106226313A (zh) * | 2016-07-01 | 2016-12-14 | 华南理工大学 | 一种基于散斑剪切干涉的缺陷深度检测方法 |
| CN108106556A (zh) * | 2018-02-02 | 2018-06-01 | 上海交通大学 | 基于数字散斑干涉的曲面物体离面形变测量方法及装置 |
| CN114527129A (zh) * | 2021-12-10 | 2022-05-24 | 桂林电子科技大学 | 基于剪切散斑干涉的小型工件内部缺陷检测装置及方法 |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN116429680A (zh) * | 2023-03-31 | 2023-07-14 | 北京京仪自动化装备技术股份有限公司 | 粘附力测量系统、方法及电子设备 |
| CN116429680B (zh) * | 2023-03-31 | 2026-03-27 | 北京京仪自动化装备技术股份有限公司 | 粘附力测量系统、方法及电子设备 |
| CN120160551A (zh) * | 2025-02-20 | 2025-06-17 | 华中科技大学 | 一种基于背景纹影的电子封装翘曲检测方法及系统 |
| CN120871411A (zh) * | 2025-09-22 | 2025-10-31 | 苏州大学 | 一种干涉条纹生成元件、生成装置以及缺陷检测方法 |
| CN121409130A (zh) * | 2025-12-26 | 2026-01-27 | 深圳北理莫斯科大学 | 变形测量方法、装置和电子设备 |
| CN121409130B (zh) * | 2025-12-26 | 2026-04-03 | 深圳北理莫斯科大学 | 变形测量方法、装置和电子设备 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN115727770B (zh) | 2025-10-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN115727770A (zh) | 一种基于散斑剪切干涉的计量曲面物体离面位移方法 | |
| CN113237435B (zh) | 一种高反光表面三维视觉测量系统及方法 | |
| Quan et al. | Shape measurement of small objects using LCD fringe projection with phase shifting | |
| CN100520285C (zh) | 投射多频光栅的物体表面三维轮廓的视觉测量方法 | |
| CN105783775B (zh) | 一种镜面及类镜面物体表面形貌测量装置与方法 | |
| CN102589416B (zh) | 用于非球面测量的波长扫描干涉仪及方法 | |
| CN111307063B (zh) | 一种消除单幅干涉条纹波面恢复中的符号模糊问题的方法 | |
| CN106767427B (zh) | 利用涡旋光阵列奇异特性测量物体离面位移的方法及系统 | |
| CN106840027A (zh) | 光学自由曲面的像散补偿型干涉检测装置与检测方法 | |
| CN108955575B (zh) | 一种基于单幅干涉条纹高精度地恢复波面的方法 | |
| CN103727891A (zh) | 同步三维散斑干涉测量系统及测量方法 | |
| CN109780992A (zh) | 基于光学平面条纹图像处理的干涉测量系统误差标定方法 | |
| CN106197322A (zh) | 一种面结构光三维测量系统 | |
| CN101915559A (zh) | 利用电子散斑相移技术测量物体三维面形的方法及其系统 | |
| CN104279981A (zh) | 一种基于条纹反射的镜面/类镜面物体绝对面形的测量方法及装置 | |
| CN111815697B (zh) | 一种热变形动态三维测量方法 | |
| CN115218810A (zh) | 抗强光、强热辐射干扰的单相机三维变形测量系统及方法 | |
| Guan et al. | An improved geometrical calibration method for stereo deflectometry by using speckle pattern | |
| CN111412850A (zh) | 一种基于单摄像头的高温三维数字图像相关测量系统及方法 | |
| CN113946117A (zh) | 散射光场全息范围三维位移测量装置、方法及介质 | |
| CN115077390A (zh) | 一种基于双波长涡旋光自共轭干涉的大量程皮米级位移测量系统及方法 | |
| CN116147518B (zh) | 一种基于偏振复用的全场动态三维形变测量方法及系统 | |
| CN112268520A (zh) | 一种齿轮齿面形状误差的非接触柔性化的测量方法 | |
| CN112268521B (zh) | 面向齿轮齿面形状误差的变角度同步相移干涉测量方法 | |
| CN117848237B (zh) | 一种基于椭圆拟合的三维表面形貌测量及计算方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |