CN1176005C - 自动扶梯安装施工法 - Google Patents
自动扶梯安装施工法 Download PDFInfo
- Publication number
- CN1176005C CN1176005C CNB001043188A CN00104318A CN1176005C CN 1176005 C CN1176005 C CN 1176005C CN B001043188 A CNB001043188 A CN B001043188A CN 00104318 A CN00104318 A CN 00104318A CN 1176005 C CN1176005 C CN 1176005C
- Authority
- CN
- China
- Prior art keywords
- escalator
- mentioned
- pit
- excavation
- installation method
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images

Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B21/00—Kinds or types of escalators or moving walkways
Landscapes
- Escalators And Moving Walkways (AREA)
Abstract
一种在有阶梯7的建筑物6能高效率安装且稳定设置自动扶梯的自动扶梯安装工法,包括:在阶梯7下侧的下层地面10形成下部地坑11的工序1;在阶梯7上侧的上层地面8形成上部地坑9的工序2;在上部地坑9与下部地坑11之间的阶梯7部分保持不挖掘的状态下,将一体结构物构成的该薄型自动扶梯1的下部平坦部14安放于下部地坑11,将上部平坦部12安放于上部地坑9,将倾斜部13设置在上部地坑9与下部地坑11之间的阶梯7部分之上的工序3,如此进行安装。
Description
技术领域
本发明涉及在火车站等设有阶梯的场所安装自动扶梯的自动扶梯安装工法。
背景技术
历来,作为在建筑物的形成步行者通道的阶梯部分设置自动扶梯的技术,例如已知有日本发明专利公开1995年第179282号公报、日本发明专利公开1995年第179283号公报及日本发明专利公开1995年第179284号公报所记载的技术。
在这些现有技术中,未阐明如何在设有阶梯的场所安装自动扶梯。
发明内容
本发明的目的在于,提供一种能够高效率进行安装作业且能稳定设置自动扶梯的自动扶梯安装工法
为了达到上述目的,本发明挖掘位于阶梯上侧的上部地面形成第1挖掘部,同时挖掘位于上述阶梯下侧的下部地面形成第2挖掘部,在上述上部地面的上述第1挖掘部安放该自动扶梯的上部平坦部,在上述下部地面的上述第2挖掘部安放该自动扶梯的下部平坦部,在位于上述第1挖掘部与上述第2挖掘部中间的上述阶梯部分之上,配置该自动扶梯的倾斜部。
因为采用如上所述的安装工法,所以,只要挖掘安放该自动扶梯上部平坦部的第1挖掘部及安装该自动扶梯下部平坦部的第2挖掘部,不必进行自动扶梯整个长度的挖掘作业,就能进行该自动扶梯的安装。
附图说明
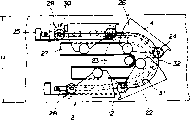
附图中,图1所示为由本发明自动扶梯安装工法第1实施形态实施所安装的自动扶梯主要部分剖切后的侧视图。
图2所示为图1A部部的放大剖视图。
图3为示出第1所示自动扶梯上部翻转部附近内部结构的主要部分放大剖视图。
图4为示出自动扶梯安装之前的阶梯部分的侧面剖视图。
图5所示为说明本发明自动扶梯安装工法第1实施形态中的第1工序的侧面剖视图。
图6所示为说明本发明第1实施形态中的第2工序的侧面剖视图。
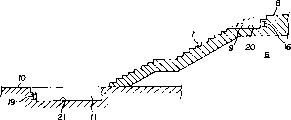
图7所示为说明本发明第1实施形态中的第3工序的侧面剖视图。
图8所示为将说明本发明第2实施形态的主要部分剖切后的侧视图。
另外,图中的符号9为作为第1挖掘部或第2挖掘部的上部地坑,符号11为作为第2挖掘部或第1挖掘部的下部地坑。
具体实施方式
以下,根据附图说明本发明自动扶梯安装工法的实施形态。
首先根据图1-图3,说明作为本发明对象的自动扶梯。这些附图1-3所示的自动扶梯例如如后面所述,与一般的自动扶梯相比,是形成本体的扶梯框架的高度尺寸较小的薄型自动扶梯。
图1所示的自动扶梯1具有形成本体的扶梯框架2、竖立设置在该扶梯框架2上的栏杆3、运送乘客的踏脚台阶4及与该踏脚台阶4同步移动的扶手带5。该图1所示的自动扶梯例如整个扶梯框架2是由一体结构物构成的,并且例如竖立设置在该扶梯框架2上的栏杆3、踏脚台阶4及扶手带5也是成一体的。
设置该自动扶梯1的建筑物6具有阶梯7,同时,在位于该阶梯7上侧的上部地面即上层地面8,设有挖掘该上层地面8的一部分而形成的第1挖掘部即上部地坑9。并在位于阶梯7下侧的下部地面即下层地面10,设有挖掘该下层地面10的一部分而形成的第2挖掘部即下部地坑11。
自动扶梯1的上部平坦部12配置在上部地坑9内,下部平坦部14配置在下部地坑10内,倾斜部13配置在阶梯7上与其相对。
如图2所示,自动扶梯1的扶梯框架2的上端部15通过垫片17支承在建筑物6的建筑物梁16上。同样如图1所示,扶梯框架2的下端部18通过垫片支承在建筑物6的建筑物梁19上。
此外,如图1所示,该自动扶梯1配置成扶梯框架2的位于上端部15下方的上部平坦部12的部分与上部地坑9的底面20架空,同样,扶梯框架2的位于下端部18下方的下部平坦部14的部分与下部地坑11的底面21架空。
又如图3所示,该自动扶梯1在设于扶梯框架2的上部平坦部12的踏脚台阶4的翻转部22,配置有比一般的自动扶梯直径尺寸小的例如齿数为18的驱动链轮23。踏脚台阶4的前轮24由前轮导轨25导向,踏脚台阶4的后轮26由后轮导轨27导向。前轮导轨25的轨道在该扶梯框架2的宽度方向、即与该图3的纸面正交的方向,位于后轮导轨27的外侧。设有连接各踏脚台阶4的前轮轴的例如链节距为6的链条28,并用三角形状的特定链节29使该链条28与各前轮轴连接。该特定链节29上设有可以使前轮轴发生位移的长孔30。该长孔30向相对链条28伸长方向大致为正交的方向延伸设置。
现说明该构成部分的动作。在来路上移动的踏脚台阶4当位于虽然接近翻转部22但尚在上侧时,踏脚台阶4的踏面仍朝上保持水平,前轮轴位于特定链节29的长孔30的下端。从该状态向前进,踏脚台阶4开始翻转,在前轮24到达驱动链轮23的大致高度位置中央附近之前,前轮轴沿着特定链节29的长孔30的伸长方向移动,一旦前轮24到达驱动链轮23的大致中间高度附近,即呈该前轮轴位于长孔30的上端即该图3的最右端的状态。踏脚台阶4进一步翻转,当踏脚台阶4的踏面朝下保持水平、呈返回回路的状态,前轮轴再次位于特定链节29的长孔30的下端。
由于如上所述进行动作,链条28的轨道31与踏脚台阶4的前轮轴所描绘的轨道32在到达翻转部22之前的来路及通过翻转部22之后的回路上基本是一致的,但在翻转部22,相对链条28的轨道31,踏脚台阶4的前轮轴轨道32位于外侧。即,是与一般非薄型自动扶梯所设驱动链轮上所卷绕的链条轨道近似的轨道。因此,将要翻转的踏脚台阶4与该踏脚台阶4所相邻的踏脚台阶4不会相碰,能使这些踏脚台阶4顺利进行翻转动作。
另外,如上所述,因为驱动链轮23的直径比一般自动扶梯的驱动链轮的要小,所以,在该第1实施形态中,可以使该图3所示的扶梯框架2的高度尺寸H比一般自动扶梯的扶梯框架的高度尺寸例如小约20-30%。因此,自动扶梯1可以做成其总高比一般自动扶梯低的薄型自动扶梯。
以下根据图4-图7,说明将上述自动扶梯1安装于建筑物6的本发明的安装工法的第1实施形态。
该第1实施形态是将薄型自动扶梯1设置于上述建筑物6的工法,如图4所示,建筑物6与前面叙述的一样,具有上层地面8和下层地面10,并具有在该上层地面8与下层地面10之间形成步行通道的阶梯7。该建筑物6例如是铁路火车站,该第1实施形态例如是在已设置的阶梯7部分并列设置自动扶梯1。
首先例如如图5所示,挖掘位于阶梯7最下部附近的下层地面10的一部分,实施形成下部地坑11的第1工序。
接着如图6所示,挖掘阶梯7最上部附近及上层地面8的一部分,实施形成上部地坑9的第2工序。
最后如图7所示,在上部地坑9与下部地坑11之间的阶梯7部分保持未挖掘状态的情况下,将上述图1-图3说明过的由薄型一体结构物构成的自动扶梯1搬入阶梯7部分,将其下部平坦部14放入下部地坑11,将其上部平坦部12放入上部地坑9,并在上部地坑9与下部地坑11之间的阶梯7部分之上,配置该自动扶梯1的倾斜部13,实施安装的第3工序。
在该第3工序中,实施使自动扶梯1的扶梯框架2的上端部15通过垫片17(图2)支承于建筑物6的建筑物梁16的作业,以及,实施使扶梯框架2的下端部18通过垫片支承于建筑物6的建筑物梁19的作业。此时如前所述,实施这样的作业,将扶梯框架2的位于上端部15下方的上部平坦部12的部分配置成与上部地坑9的底面20架空,并将扶梯框架2的位于下端部18下方的下部平坦部14的部分配置成与下部地坑11的底面21架空。
由此,如上述关于图1的说明那样,薄型自动扶梯1的上部平坦部12的上侧面与上层地面8形成于同一个面,下部平坦部14的上侧面与下层地面10形成于同一个面,同时,位于上部平坦部12与下部平坦部14之间的倾斜部13被安装成与阶梯7架空的状态。
如上所述,在安装自动扶梯的第1实施形态中,只要挖掘安放自动扶梯1的上部平坦部12的上部地坑9和安放下部平坦部14的下部地坑11即可,不必进行长达该自动扶梯全长的挖掘作业,即,不必进行阶梯7的錾凿作业,就能进行该自动扶梯1的安装。因此,能减少挖掘作业工时数,能提高安装作业的效率。并且随之可以缩短自动扶梯1安装所需时间,满足早点使用自动扶梯1的要求。
此外,因为在该第1实施形态中,要安装的是薄型自动扶梯1,所以,虽然图1中未明确记载,但在建筑物6有顶棚的情况下,可以充分保证从阶梯7部分至顶棚部的高度尺寸,用该自动扶梯运送乘客不会发生障碍。
另外,因为该自动扶梯1包括扶梯框架2在内整个是由一体结构物构成的,所以,在安装现场不必进行扶梯框架2的连接作业,在这一点上,能进一步减少安装作业工时数,有利于提高作业效率。
还有,因为使自动扶梯1的扶梯框架2的上端部15支承在建筑物6的建筑物梁16上,并使扶梯框架2的下端部18支承在建筑物6的建筑物梁19上,所以,建筑物梁16、19承受该自动扶梯的负荷,因此,能将该自动扶梯1配置成稳定的状态,能实现高精度的安装。
另外,因为配置成使扶梯框架2的位于上端部15下方的上部平坦部12的部分从上部地坑9的底面20向上浮起,并使位于下端部18下方的下部平坦部14的部分从下部地坑11的底面21向上浮起,所以,自动扶梯1的负荷不会传递到上部地坑9的底面20及下部地坑11的底面21,因此,不用担心这些底面20、21会发生变形或破损,能实现自动扶梯1对设置环境的安全保护。
图8为将说明本发明安装工法第2实施形态的主要部分剖切后的侧视图。
在该第2实施形态中,自动扶梯1由薄型自动扶梯构成,并且,例如由包括扶梯框架第1分割部分13a的下部分割部1a和包括扶梯框架第2分割部13b的上部分割部1b这样两个分割部分组成。
在该第2实施形态中,例如与上述的第1实施形态一样,作为第1工序,挖掘位于阶梯7最下部附近的下层地面10的一部分,形成下部地坑11。
接着,作为第2工序,挖掘阶梯7的最上部附近及上层地面8的一部分,形成上部地坑9。
位于上部地坑9与下部地坑11之间的阶梯7部分保持不挖掘的状态。
在这样的状态下,例如当从下层地面10侧搬入时,在上部分割部1b未搬入该自动扶梯1的设置现场的状态下,包含在下部分割部1a内的下部平坦部14被配置在下部地坑11,接着,包含在上部分割部1b内的上部平坦部12被配置在上部地坑9,然后,将下部分割部1a与上部分割部1b连接。
此外相反,当从上层地面8侧搬入时,在下部分割部1a未搬入该自动扶梯1的设置现场的状态下,包含在上部分割部1b内的上部平坦部12被配置在上部地坑9内,接着,包含在下部分割部1a内的下部平坦部14被配置在下部地坑11内,然后,将上部分割部1b与下部分割部1a连接。
上述的任一种方法,都是使下部分割部1a的下端部18通过垫片支承在建筑物6的建筑物梁19上,使上部分割部1b的上端部15通过垫片支承在建筑物6的建筑物梁16上,同时,配置成使下部分割部1a的位于下端部18下方的下部平坦部14部分与下部地坑11的底面21架空,并使上部分割部1b的位于上端部15下方的上部平坦部12的部分与上部地坑9的底面20架空。
这样进行自动扶梯安装的第2实施形态,因为也不挖掘上部地坑9与下部地坑11之间的阶梯7部分,所以,能获得与上述实施形态1相同的作用效果。
尤其是,当从下层地面10侧搬入时,在自动扶梯1的设置场所没有上部分割部13b的状态下,将下部分割部13a搬入到下部地坑11附近并配置在规定位置,而当从上层地面8侧搬入时,在自动扶梯1的设置场所没有下部分割部1a的状态下,将上部分割部13b搬入到上部地坑9附近并配置在规定位置,所以,当进行该自动扶梯1的安装作业时,可以在分割部分不会发生相互妨碍或相碰的情况下进行作业,这一点有利于提高作业效率。
此外,与如上述第1实施形态所述那样,安装由包括扶梯框架2在内的一体结构物构成的自动扶梯1的情况相比,虽然要进行连接下部分割部1b与上部分割部1a的作业,安装作业的工时数相应增多这一部分,但与整体为一体结构物时相比,因为各分割部1b、1a的重量较轻,各分割部1b、1a搬运就位容易,由于这一点,安装作业变容易,有利于作业效率的提高。
另外,在上述各实施形态中,是希望安装薄型的自动扶梯1,但在顶棚高度尺寸有足够余地等的情况下,也可以安装历来一般设置的普通自动扶梯。
此外,在上述各实施形态中,作为第1工序,是挖掘并形成下部地坑11,作为第2工序,是挖掘并形成上部地坑9,但本发明并不受此限制,也可以与上述相反,作为第1工序,挖掘并形成上部地坑9,作为第2工序,挖掘并形成下部地坑11。
此外,在上述各实施形态中,使自动扶梯1支承在建筑物6的建筑物梁16及19两处,但也可以仅支承在其中的任一处。另外,也可以不支承在这些建筑物梁16、19上,而支承在其它支承体上。
此外,在上述各实施形态中,使自动扶梯1的位于上端部15下方的上部平坦部12的部分及位于下端部18下方的下部平坦部14的部分分别与上部地坑9的底面20及下部地坑11的底面21架空,但也可以使其中任一端放置在地坑的底面上。另外,在地坑底面的强度得到充分保证的情况下,也可以将两端放置在地坑底面上。
此外,在上述第1实施形态中,自动扶梯1为一体结构物,但也可以仅扶梯框架2是一体结构物,在搬入扶梯框架2之后,再安装其它的栏杆3、踏脚台阶4、扶手带5等。
此外,上述第2实施形态也一样,下部分割部1a为包括扶梯框架第1分割部13a、栏杆部分、踏脚台阶部分及扶手带部分在内的一体结构物,上部分割部1b为包括扶梯框架第2分割部13b、栏杆部分、踏脚台阶部分及扶手带在内的另一结构物,但也可以在扶梯框架第1分割部13a、扶梯框架第2分割部13b搬入之后,再安装栏杆、踏脚台阶、扶手带等。
另外,在上述第2实施形态中,是由两个分割部分构成自动扶梯1的,但也可以由3个以上的分割部分构成。
此外,该第2实施形态安装的也是薄型的自动扶梯1,但在能充分保证上部空间的设置环境下进行安装时,也可以是分割构成的通常的自动扶梯。
如以上说明所述,若采用本发明,不用进行长达自动扶梯全长的挖掘作业,就能安装该自动扶梯,因此,能减少挖掘作业工时数,与传统的相比,能提高挖掘作业的效率。因此,自动扶梯安装所需时间可以比传统的缩短,能满足早点使用自动扶梯的需求。
Claims (10)
1.一种在设有阶梯的场所安装自动扶梯的自动扶梯安装工法,其特征在于,
挖掘位于阶梯上侧的上部地面形成第1挖掘部,并挖掘位于上述阶梯下侧的下部地面形成第2挖掘部;
在上述上部地面的上述第1挖掘部安放该自动扶梯的上部平坦部,在上述下部地面的上述第2挖掘部安放该自动扶梯的下部平坦部,在位于上述第1挖掘部与上述第2挖掘部中间的上述阶梯部分之上,配置该自动扶梯的倾斜部,如此进行安装。
2.根据权利要求1所述的自动扶梯安装工法,其特征在于,上述自动扶梯是形成其本体的扶梯框架的高度尺寸比一般的扶梯框架要小的薄型自动扶梯。
3.根据权利要求1或2所述的自动扶梯安装工法,其特征在于,形成上述自动扶梯本体的扶梯框架由一体结构物构成。
4.根据权利要求1或2所述的自动扶梯安装工法,其特征在于,形成上述自动扶梯本体的扶梯框架由分割成多块的分割扶梯框架连接而成。
5.根据权利要求1所述的自动扶梯安装工法,其特征在于,使形成上述自动扶梯本体的扶梯框架的上端部和/或下端部支承在设置该自动扶梯的建筑物所具有的建筑物梁上。
6.根据权利要求2所述的自动扶梯安装工法,其特征在于,使形成上述自动扶梯本体的扶梯框架的上端部和/或下端部支承在设置该自动扶梯的建筑物所具有的建筑物梁上。
7.根据权利要求3所述的自动扶梯安装工法,其特征在于,使形成上述自动扶梯本体的扶梯框架的上端部和/或下端部支承在设置该自动扶梯的建筑物所具有的建筑物梁上。
8.根据权利要求4所述的自动扶梯安装工法,其特征在于,使形成上述自动扶梯本体的扶梯框架的上端部和/或下端部支承在设置该自动扶梯的建筑物所具有的建筑物梁上。
9.根据权利要求5-8中任一项所述的自动扶梯安装工法,其特征在于,将上述扶梯框架的位于上端部和/或下端部下方的部分配置成与上述第1挖掘部和/或第2挖掘部的底面架空。
10.根据权利要求4所述的自动扶梯安装工法,其特征在于,
当将上述扶梯框架的分割部分从上述下部地面侧搬入规定的安装场所时,将与上述下部平坦部相应的分割部分配置在上述第2挖掘部之后,再将与上述上部平坦部相应的分割部分配置在上述第1挖掘部;
当将上述扶梯框架的分割部分从上述上部地面侧搬入规定的安装场所时,将与上述上部平坦部相应的分割部分配置在上述第1挖掘部之后,再将与上述下部平坦部相应的分割部分配置在上述第2挖掘部。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP35805999A JP3456932B2 (ja) | 1999-12-16 | 1999-12-16 | エスカレータの据付工法 |
| JP358059/99 | 1999-12-16 | ||
| JP358059/1999 | 1999-12-16 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1299771A CN1299771A (zh) | 2001-06-20 |
| CN1176005C true CN1176005C (zh) | 2004-11-17 |
Family
ID=18457328
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CNB001043188A Expired - Fee Related CN1176005C (zh) | 1999-12-16 | 2000-03-15 | 自动扶梯安装施工法 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US6247574B1 (zh) |
| EP (1) | EP1108674B1 (zh) |
| JP (1) | JP3456932B2 (zh) |
| CN (1) | CN1176005C (zh) |
| MY (1) | MY123419A (zh) |
| SG (1) | SG85163A1 (zh) |
| TW (1) | TWI237004B (zh) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| IL151654A (en) * | 2002-09-09 | 2011-02-28 | Oscar Sircovich | Stair raising system |
| US6685002B1 (en) * | 2002-10-15 | 2004-02-03 | Kone Corporation | Method of escalator modernization |
| DE102009017076B4 (de) * | 2009-04-09 | 2012-06-28 | Kone Corp. | Einrichtung zum Personentransport |
| JP2013508243A (ja) * | 2009-10-19 | 2013-03-07 | オーチス エレベータ カンパニー | 乗客コンベアのトラス構造 |
| ES2894733T3 (es) * | 2013-12-06 | 2022-02-15 | Inventio Ag | Soporte para el montaje en el sitio de un dispositivo de transporte de personas |
| JP6383628B2 (ja) * | 2014-10-14 | 2018-08-29 | 株式会社日立製作所 | 乗客コンベア |
| US9440820B2 (en) * | 2015-01-09 | 2016-09-13 | Kone Coporation | Escalator lifting frame and method of using the same |
| WO2017126177A1 (ja) * | 2016-01-21 | 2017-07-27 | 三菱電機株式会社 | 乗客コンベヤ |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE1456371A1 (de) * | 1966-07-30 | 1968-12-05 | Lutz Dr Ing Hermann | Rolltreppe |
| JPH0671995B2 (ja) * | 1986-05-10 | 1994-09-14 | 株式会社日立製作所 | 乗客コンベアのフレームの組立方法 |
| JPH07179284A (ja) * | 1993-12-24 | 1995-07-18 | Hitachi Ltd | 通路設備 |
| CN1187256C (zh) * | 1998-06-11 | 2005-02-02 | 因温特奥股份公司 | 电梯或移动通道 |
| JP2000203781A (ja) * | 1999-01-14 | 2000-07-25 | Nippon Fillester Co Ltd | エスカレ―タの設置構造 |
| JP4410339B2 (ja) * | 1999-05-24 | 2010-02-03 | 三菱電機株式会社 | 乗客コンベヤーの設置方法 |
-
1999
- 1999-12-16 JP JP35805999A patent/JP3456932B2/ja not_active Expired - Fee Related
-
2000
- 2000-03-13 SG SG200001498A patent/SG85163A1/en unknown
- 2000-03-13 EP EP00105220A patent/EP1108674B1/en not_active Expired - Lifetime
- 2000-03-13 MY MYPI20000969A patent/MY123419A/en unknown
- 2000-03-14 US US09/525,027 patent/US6247574B1/en not_active Expired - Fee Related
- 2000-03-15 CN CNB001043188A patent/CN1176005C/zh not_active Expired - Fee Related
- 2000-04-26 TW TW089107903A patent/TWI237004B/zh not_active IP Right Cessation
Also Published As
| Publication number | Publication date |
|---|---|
| EP1108674A3 (en) | 2004-01-28 |
| JP3456932B2 (ja) | 2003-10-14 |
| EP1108674A2 (en) | 2001-06-20 |
| US6247574B1 (en) | 2001-06-19 |
| TWI237004B (en) | 2005-08-01 |
| JP2001171961A (ja) | 2001-06-26 |
| CN1299771A (zh) | 2001-06-20 |
| MY123419A (en) | 2006-05-31 |
| SG85163A1 (en) | 2001-12-19 |
| EP1108674B1 (en) | 2011-12-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN1111503C (zh) | 滚动楼梯或移动步道的支承结构 | |
| CN1251958C (zh) | 乘客输送装置 | |
| CN1176005C (zh) | 自动扶梯安装施工法 | |
| KR20190018646A (ko) | 빌딩의 현대화 방법 및 빌딩에 형성된 리프트 시스템을 구비한 구조체 | |
| CN1175546A (zh) | 平行设置的乘客输送机设备及其安装方法 | |
| CN1059483C (zh) | 楼梯和楼梯间的构筑方法和楼梯部件 | |
| CN1167599C (zh) | 电梯装置 | |
| CN1167602C (zh) | 乘客运送装置 | |
| CN110552519A (zh) | 深基坑装配式安全通道施工方法 | |
| CN100336713C (zh) | 电梯的作业脚手架装置 | |
| CN112854010B (zh) | 拼装顶升式建筑施工方法 | |
| CN2466126Y (zh) | 自升式内爬顶升系统 | |
| CN1299772A (zh) | 通道设备 | |
| CN101603377B (zh) | 垂直立体车库的运行提速方法 | |
| CN1243659C (zh) | 电梯装置 | |
| CN1248949C (zh) | 电梯装置 | |
| JP5572448B2 (ja) | 仮設ピットの設置方法 | |
| CN214463927U (zh) | 垂直升降式钻塔及直升套装组装系统 | |
| JPS6319483Y2 (zh) | ||
| JP2001240352A (ja) | 階段通路設備及びそれに用いる乗客コンベア | |
| CN1590706A (zh) | 通过地下箱体的推进构建隧道的方法及装置 | |
| JP2001080861A (ja) | 乗客コンベア | |
| JP3143823B2 (ja) | 駐車装置 | |
| CN113266117A (zh) | 装配式混凝土梁式楼梯及其安装方法 | |
| CN117822838A (zh) | 一种加装悬空式电梯井道 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C06 | Publication | ||
| PB01 | Publication | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| C17 | Cessation of patent right | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20041117 Termination date: 20130315 |