CN216185444U - 一种四驱四转的机器人轮系结构 - Google Patents
一种四驱四转的机器人轮系结构 Download PDFInfo
- Publication number
- CN216185444U CN216185444U CN202122536409.3U CN202122536409U CN216185444U CN 216185444 U CN216185444 U CN 216185444U CN 202122536409 U CN202122536409 U CN 202122536409U CN 216185444 U CN216185444 U CN 216185444U
- Authority
- CN
- China
- Prior art keywords
- wheel
- damping spring
- hydraulic damping
- spring shock
- drive
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 239000006096 absorbing agent Substances 0.000 claims abstract description 33
- 238000013016 damping Methods 0.000 claims abstract description 33
- 230000035939 shock Effects 0.000 claims abstract description 33
- 230000007246 mechanism Effects 0.000 claims abstract description 11
- 230000001360 synchronised effect Effects 0.000 claims description 31
- 239000003381 stabilizer Substances 0.000 claims description 14
- 230000005540 biological transmission Effects 0.000 claims description 13
- 230000033001 locomotion Effects 0.000 abstract description 3
- 230000000694 effects Effects 0.000 abstract description 2
- 238000000034 method Methods 0.000 abstract 1
- 239000000725 suspension Substances 0.000 description 5
- 238000005516 engineering process Methods 0.000 description 4
- 230000007547 defect Effects 0.000 description 2
- 239000000853 adhesive Substances 0.000 description 1
- 230000001070 adhesive effect Effects 0.000 description 1
- 230000003321 amplification Effects 0.000 description 1
- 230000009286 beneficial effect Effects 0.000 description 1
- 230000000994 depressogenic effect Effects 0.000 description 1
- 230000007613 environmental effect Effects 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 238000003199 nucleic acid amplification method Methods 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
Images


Landscapes
- Steering-Linkage Mechanisms And Four-Wheel Steering (AREA)
- Vehicle Body Suspensions (AREA)
Abstract
一种四驱四转的机器人轮系结构,当底盘需要转向时,转向舵机的转轴转动一定角度,其通过传动机构驱动转轴转动,转动通过连接件驱动两个液压阻尼弹簧减震器带动轮毂法兰转动,实现驱动车轮转动,两个液压阻尼弹簧减震器起到行走时减震作用,提高了底盘运行时的平稳度,通过四个轮毂电机驱动运动,四个转向舵机转向控制,转向和驱动灵活,控制技术比较简单,驱动和转向动力强劲,拓展了复杂路况下机器人的适用场景,从而适应不同的任务需求。
Description
技术领域
本实用新型涉及移动机器人领域,具体涉及一种四驱四转的机器人轮系结构。
背景技术
随着智能化、无人化的技术发展,越来越多的环境任务都由无人智能机器人来实施。机器人从单一的车间环境工作逐渐扩展到复杂的野外环境,轮式移动机器人以移动方便、定位准确、控制方便等优点,使得移动式机器人得到了广泛的应用。
目前国内使用最为频繁的四轮式机器人为双驱动电机驱动型、四电机麦克纳姆轮型、阿克曼前转后驱型以及四驱四转型,前两者都会出现转向里程偏差问题,阿克曼前转后驱型则是在转向时需要的转向半径较大,难以在小空间环境下使用,而四转四驱型相比于上述三种结构,具有高效的传动能力以及全向全运动学状态,且不会出现里程偏差。
但目前的四驱移动底盘还存在以下的不足:四驱移动底盘的整体结构复杂,可靠性差,一方面不方便进行组装,造成四驱移动底盘的成本高,一方面复杂的结构造成驱移动底盘的体积大,从而造成机器人整体显得笨重,造成机器人工作范围受限。而且对于野外的复杂环境适应性较差,尤其是无悬挂无独立转向的机器人,在原地转时的差速运动会严重磨损车轮,甚至出现转向动力不足。当路面凹凸不平时,机器人的四个轮子无法全部接触地面,这导致机器人的控制出现困难。
发明内容
本实用新型为了克服以上技术的不足,提供了一种对室外复杂环境适应性高、可靠性及稳定性均得以提高的四驱四转的机器人轮系结构。
本实用新型克服其技术问题所采用的技术方案是:
一种四驱四转的机器人轮系结构,包括底盘,其下端四个边角处分别设置有轮系,所述轮系包括:
支架,其安装于定轴上,转向舵机安装于支架上;
定轴,安装于底盘的下端,定轴内沿竖直方向设置有通孔,所述通孔内通过轴承Ⅱ转动安装有转轴,转向舵机通过传动机构驱动转轴转动;
连接架,安装于转轴的下端;
轮毂法兰,位于连接架的下端,轮毂电机的转轴安装于轮毂法兰上,轮毂电机的外圈安装有车轮;以及
两个液压阻尼弹簧减震器,分别沿竖直方向设置,两个液压阻尼弹簧减震器沿前后方向排布,液压阻尼弹簧减震器的上端固定于连接架上,其下端安装于轮毂法兰上。
进一步的,上述传动机构包括通过轴承Ⅰ转动安装于底盘上的同步带轮Ⅰ以及同轴安装于转轴上的同步带轮Ⅱ,所述同步带轮Ⅰ与同步带轮Ⅱ之间通过同步带传动连接,所述同步带轮Ⅰ的直径小于同步带轮Ⅱ的直径。
为了提高纵向稳定性,还包括稳定杆,其呈U字形结构,两个液压阻尼弹簧减震器与稳定杆相固定,稳定杆的两端分别与同侧的液压阻尼弹簧减震器通过螺纹连接固定。
本实用新型的有益效果是:当底盘需要转向时,转向舵机的转轴转动一定角度,其通过传动机构驱动转轴转动,转轴通过连接件驱动两个液压阻尼弹簧减震器带动轮毂法兰转动,实现驱动车轮转动,通过液压阻尼弹簧减震器支撑车身重量,并吸收路面颠簸产生的振动,保持机器人的平稳运行,悬架系统与通过底盘连接,承载底盘负载及外部负载,液压阻尼弹簧减震器使车轮通过凹凸路面时能够均匀着地,保持轮胎与地面的附着力,通过四个轮毂电机驱动运动,四个转向舵机转向控制,转向和驱动灵活,控制技术比较简单,驱动和转向动力强劲,拓展了复杂路况下机器人的适用场景,从而适应不同的任务需求。
附图说明
图1为本实用新型四驱四转的机器人的底盘部位的立体结构示意图;
图2为本实用新型的转向舵机部位的立体结构示意图;
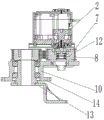
图3为本实用新型的转向舵机部位的主视剖面结构示意图;
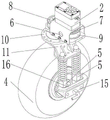
图4为本实用新型的立体结构示意图;
图中,1.底盘 2.转向舵机 3.轮毂电机 4.车轮 5.液压阻尼弹簧减震器 6.支架7.同步带轮Ⅰ 8.同步带轮Ⅱ 9.同步带 10.定轴 11.连接架 12.轴承Ⅰ 13.转轴 14.轴承Ⅱ 15.轮毂法兰 16.稳定杆。
具体实施方式
下面结合附图1至附图4对本实用新型做进一步说明。
一种四驱四转的机器人轮系结构,包括底盘1,其下端四个边角处分别设置有轮系,轮系包括:支架6,其安装于定轴10上,转向舵机2安装于支架6上;定轴10,安装于底盘1的下端,定轴10内沿竖直方向设置有通孔,通孔内通过轴承Ⅱ 14转动安装有转轴13,转向舵机2通过传动机构驱动转轴13转动;连接架11,安装于转轴13的下端;轮毂法兰15,位于连接架11的下端,轮毂电机3的转轴安装于轮毂法兰15上,轮毂电机3的外圈安装有车轮4;以及两个液压阻尼弹簧减震器5,分别沿竖直方向设置,两个液压阻尼弹簧减震器5沿前后方向排布,液压阻尼弹簧减震器5的上端固定于连接架11上,其下端安装于轮毂法兰15上。轮毂电机3通电后驱动车轮4转动,从而实现底盘1的前行或倒退,当底盘1需要转向时,转向舵机2的转轴转动一定角度,其通过传动机构驱动转轴13转动,转轴13通过连接件11驱动两个液压阻尼弹簧减震器5带动轮毂法兰15转动,实现驱动车轮4转动,通过液压阻尼弹簧减震器5支撑车身重量,并吸收路面颠簸产生的振动,保持机器人的平稳运行,悬架系统与通过底盘连接,承载底盘负载及外部负载,液压阻尼弹簧减震器5使车轮4通过凹凸路面时能够均匀着地,保持轮胎与地面的附着力,通过四个轮毂电机3驱动运动,四个转向舵机2转向控制,转向和驱动灵活,控制技术比较简单,驱动和转向动力强劲,拓展了复杂路况下机器人的适用场景,从而适应不同的任务需求。
传动机构可以为如下结构,其包括通过轴承Ⅰ 12转动安装于底盘1上的同步带轮Ⅰ7以及同轴安装于转轴13上的同步带轮Ⅱ 8,同步带轮Ⅰ 7与同步带轮Ⅱ 8之间通过同步带9传动连接,同步带轮Ⅰ 7的直径小于同步带轮Ⅱ 8的直径。转向舵机2驱动同步带轮Ⅰ 7转动一定角度,同步带轮Ⅰ 7通过同步带9驱动同步带轮Ⅱ 8转动,从而实现驱动转轴13转动,由于同步带轮Ⅰ 7的直径小于同步带轮Ⅱ 8,因此同步带轮Ⅰ 7与同步带轮Ⅱ 8的传动连接起到减速放大扭矩作用,可以轻松驱动车轮4转动。
优选的,还包括稳定杆16,其呈U字形结构,两个液压阻尼弹簧减震器5与稳定杆16相固定,稳定杆16的两端分别与同侧的液压阻尼弹簧减震器5通过螺纹连接固定。悬架系统采用液压阻尼弹簧减震器5、稳定杆16将底盘1和车轮4连接到一起。悬架系统的稳定杆16防止车轮4在通过路障及坑洼路面时发生过大的纵向侧倾,使车身尽量保持平衡,起到纵向稳定的作用。当机器人跨越障碍时,车轮4绕轮轴前后倾,转向机构的前后两个液压阻尼弹簧减震器5跳动不一致,液压阻尼弹簧减震器5会压向稳定杆,稳定杆16就会发生扭曲,杆身的弹力会阻止液压阻尼弹簧减震器5抬起,从而使两个液压阻尼弹簧减震器5尽量保持平衡,起到纵向稳定的作用
最后应说明的是:以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
Claims (3)
1.一种四驱四转的机器人轮系结构,包括底盘(1),其下端四个边角处分别设置有轮系,其特征在于,所述轮系包括:
支架(6),其安装于定轴(10)上,转向舵机(2)安装于支架(6)上;
定轴(10),安装于底盘(1)的下端,定轴(10)内沿竖直方向设置有通孔,所述通孔内通过轴承Ⅱ(14)转动安装有转轴(13),转向舵机(2)通过传动机构驱动转轴(13)转动;
连接架(11),安装于转轴(13)的下端;
轮毂法兰(15),位于连接架(11)的下端,轮毂电机(3)的转轴安装于轮毂法兰(15)上,轮毂电机(3)的外圈安装有车轮(4);以及
两个液压阻尼弹簧减震器(5),分别沿竖直方向设置,两个液压阻尼弹簧减震器(5)沿前后方向排布,液压阻尼弹簧减震器(5)的上端固定于连接架(11)上,其下端安装于轮毂法兰(15)上。
2.根据权利要求1所述的四驱四转的机器人轮系结构,其特征在于:所述传动机构包括通过轴承Ⅰ(12)转动安装于底盘(1)上的同步带轮Ⅰ(7)以及同轴安装于转轴(13)上的同步带轮Ⅱ(8),所述同步带轮Ⅰ(7)与同步带轮Ⅱ(8)之间通过同步带(9)传动连接,所述同步带轮Ⅰ(7)的直径小于同步带轮Ⅱ(8)的直径。
3.根据权利要求1所述的四驱四转的机器人轮系结构,其特征在于:还包括稳定杆(16),其呈U字形结构,两个液压阻尼弹簧减震器(5)与稳定杆(16)相固定,稳定杆(16)的两端分别与同侧的液压阻尼弹簧减震器(5)通过螺纹连接固定。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202122536409.3U CN216185444U (zh) | 2021-10-21 | 2021-10-21 | 一种四驱四转的机器人轮系结构 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202122536409.3U CN216185444U (zh) | 2021-10-21 | 2021-10-21 | 一种四驱四转的机器人轮系结构 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN216185444U true CN216185444U (zh) | 2022-04-05 |
Family
ID=80886090
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202122536409.3U Active CN216185444U (zh) | 2021-10-21 | 2021-10-21 | 一种四驱四转的机器人轮系结构 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN216185444U (zh) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114026998A (zh) * | 2021-11-08 | 2022-02-11 | 焦昭源 | 一种可对植物播种并填埋的重金属土壤修复用播种设备 |
| CN114954637A (zh) * | 2022-06-08 | 2022-08-30 | 中国人民解放军国防科技大学 | 一种四转四驱运动机器人 |
| CN115593502A (zh) * | 2022-10-20 | 2023-01-13 | 山东新一代信息产业技术研究院有限公司(Cn) | 一种移动机器人的底盘及其转向方法 |
| CN115675630A (zh) * | 2022-11-22 | 2023-02-03 | 山东新一代信息产业技术研究院有限公司 | 一种机器人中空行星齿轮转动机构及转动控制方法 |
| CN115675631A (zh) * | 2022-11-22 | 2023-02-03 | 山东新一代信息产业技术研究院有限公司 | 一种四驱四转机器人转向机构及转动方法 |
| CN116038722A (zh) * | 2022-12-02 | 2023-05-02 | 网易(杭州)网络有限公司 | 按摩机器人、按摩机器人的控制方法、电子设备及介质 |
| CN116161118A (zh) * | 2023-02-03 | 2023-05-26 | 深圳市人工智能与机器人研究院 | 一种移动底盘 |
| CN116279907A (zh) * | 2023-01-12 | 2023-06-23 | 山东新一代信息产业技术研究院有限公司 | 一种室外机器人底盘及转动方法 |
-
2021
- 2021-10-21 CN CN202122536409.3U patent/CN216185444U/zh active Active
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114026998A (zh) * | 2021-11-08 | 2022-02-11 | 焦昭源 | 一种可对植物播种并填埋的重金属土壤修复用播种设备 |
| CN114026998B (zh) * | 2021-11-08 | 2023-10-27 | 焦昭源 | 一种可对植物播种并填埋的重金属土壤修复用播种设备 |
| CN114954637A (zh) * | 2022-06-08 | 2022-08-30 | 中国人民解放军国防科技大学 | 一种四转四驱运动机器人 |
| CN115593502A (zh) * | 2022-10-20 | 2023-01-13 | 山东新一代信息产业技术研究院有限公司(Cn) | 一种移动机器人的底盘及其转向方法 |
| CN115675630A (zh) * | 2022-11-22 | 2023-02-03 | 山东新一代信息产业技术研究院有限公司 | 一种机器人中空行星齿轮转动机构及转动控制方法 |
| CN115675631A (zh) * | 2022-11-22 | 2023-02-03 | 山东新一代信息产业技术研究院有限公司 | 一种四驱四转机器人转向机构及转动方法 |
| CN116038722A (zh) * | 2022-12-02 | 2023-05-02 | 网易(杭州)网络有限公司 | 按摩机器人、按摩机器人的控制方法、电子设备及介质 |
| CN116279907A (zh) * | 2023-01-12 | 2023-06-23 | 山东新一代信息产业技术研究院有限公司 | 一种室外机器人底盘及转动方法 |
| CN116161118A (zh) * | 2023-02-03 | 2023-05-26 | 深圳市人工智能与机器人研究院 | 一种移动底盘 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN216185444U (zh) | 一种四驱四转的机器人轮系结构 | |
| CN110239336A (zh) | 底盘系统及机器人 | |
| CN112026910A (zh) | 一种运用于无人驾驶的全自由度转向的线控底盘平台 | |
| WO2022134087A1 (zh) | 一种悬架结构、角模块系统及汽车 | |
| CN110949498B (zh) | 一种电动汽车和集成转向与悬架的轮毂结构 | |
| CN111619296B (zh) | 一种轮系运动装置用悬挂系统、汽车 | |
| CN112092539B (zh) | 一种移动式底盘 | |
| CN101648573A (zh) | 轮边综合驱动与转向的汽车行走机构 | |
| CN213862471U (zh) | 一种多功能agv机器人 | |
| CN113263909A (zh) | 一种四轮独立减震、转向及驱动的轮式机器人底盘 | |
| CN110329023B (zh) | 一种轮毂电机用双横臂独立悬架 | |
| CN111186270B (zh) | 一种具有四控制臂的电动车轮独立悬架结构 | |
| CN213322544U (zh) | 一种主动侧倾系统 | |
| CN213323321U (zh) | 一种运用于无人驾驶的全自由度转向的线控底盘平台 | |
| CN213501652U (zh) | 一种移动式底盘 | |
| CN214985620U (zh) | 一种带减震功能的无人扫地车前轮转向机构及无人扫地车 | |
| CN212667480U (zh) | 一种轮式机器人底盘的转向机构 | |
| CN212556585U (zh) | 双联减振器、双立柱单摆臂悬挂系统及悬挂式移动平台 | |
| CN213501683U (zh) | 一种零转弯半径抗震性强的底盘 | |
| CN219506087U (zh) | 一种机器人底盘转向及减震装置 | |
| CN116572683B (zh) | 一种独立悬架轮边总成 | |
| CN218805455U (zh) | 一种底盘及自移动设备 | |
| CN219790269U (zh) | 带有遥控转向的电动拖车架 | |
| CN218112773U (zh) | 一种移动机器人底盘 | |
| CN113696998B (zh) | 基于双联减振器的双立柱单摆臂悬挂式移动平台 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| GR01 | Patent grant | ||
| GR01 | Patent grant |