-
HINTERGRUND DER ERFINDUNG
-
1. Gebiet der Erfindung
-
Die Erfindung betrifft ein Antriebssystem für eine rotierende elektrische Maschine, das eine rotierende elektrische Maschine mit einem Stator und einem Rotor, die so angeordnet sind, dass sie einander zugewandt sind, eine Antriebseinheit, die die rotierende elektrische Maschine antreibt, und eine Steuereinheit, die die Antriebseinheit steuert, aufweist.
-
2. Beschreibung der verwandten Technik
-
Wie in der offengelegten japanischen Patentanmeldung Nr. 2009-112091 (
JP-A-2009-112091 ) beschrieben, ist eine rotierende elektrische Maschine bekannt, bei der Rotorspulen für einen Rotor vorgesehen sind und durch ein drehendes Magnetfeld Induktionsströme in den Rotorspulen erzeugt werden, um zu bewirken, dass der Rotor ein Drehmoment erzeugt. Das magnetische Drehfeld wird von einem Stator erzeugt und enthält räumliche Harmonische. Außerdem werden mit dieser rotierenden elektrischen Maschine auf wirksame Weise Induktionsströme in den Rotorspulen erzeugt, wodurch bewirkt werden kann, dass das Drehmoment, das auf den Rotor wirkt, wirksam erhöht wird.
23 bis
25 zeigen den schematischen Aufbau der rotierenden elektrischen Maschine, die in
JP-A-2009-112091 beschrieben ist.
23 ist eine Ansicht, die den schematischen Aufbau eines Stators und eines Rotors zeigt, die aus einer Richtung betrachtet werden, die parallel ist zur Drehachse des Rotors.
24 zeigt den schematischen Aufbau des Stators.
25 zeigt den schematischen Aufbau des Rotors.
-
Jedoch besteht im Fall der rotierenden elektrischen Maschine 10, die in 23 bis 25 dargestellt ist, immer noch Raum für Verbesserungen in Bezug auf die effiziente Erhöhung des Drehmoments während eines langsamen Rotierens, wenn die Drehzahl der rotierenden elektrischen Maschine 10 niedrig ist. 26 ist ein Graph, der ein Beispiel für die Beziehung zwischen einer Rotordrehzahl und einem Motordrehmoment in einem Bereich zeigt, in dem die Drehzahl niedrig ist, wenn der gleiche Aufbau wie derjenige der rotierenden elektrischen Maschine, die in 23 bis 25 dargestellt ist, als elektrischer Motor (Motor) verwendet wird. Wie in 26 dargestellt ist, nimmt das Motordrehmoment der rotierenden elektrischen Maschine 10 in dem Bereich, in dem die Drehzahl niedrig ist, deutlich ab. Um es mit Bezug auf 23 bis 25 zu beschreiben, so liegt dies daran, dass in der rotierenden elektrischen Maschine 10 in dem Bereich, in dem die Drehzahl niedrig ist, aber die Schnelligkeit der Schwankung von verketteten Magnetflüssen abnimmt, Rotor-Induktionsströme, die durch Rotorspulen 18n und 18s fließen, von Schwankungen des Magnetfelds wegen der harmonischen Komponenten des von einem Stator 12 erzeugten magnetischen Drehfelds erzeugt werden, während sich Magnetflüsse, die mit den Rotorspulen 18n und 18s verkettet sind, nicht nennenswert ändern, weswegen induzierte elektromotorische Spannungen abnehmen, wodurch die Rotor-Induktionsströme schwächer werden. Daher nimmt das Motordrehmoment während einer Rotation mit niedriger Drehzahl ab. Man beachte, dass in der obigen Beschreibung das Motordrehmoment abnimmt, wenn die rotierende elektrische Maschine 10 als Elektromotor in dem Bereich verwendet wird, in dem die Drehzahl niedrig ist; jedoch kann dann, wenn die rotierende elektrische Maschine 10 als Generator verwendet wird, ein regeneratives Drehmoment im Niedrigdrehzahlbereich aus demselben Grund deutlich abnehmen.
-
KURZFASSUNG DER ERFINDUNG
-
Die Erfinder wissen, dass es möglich ist, Impulsstrom über Wechselströme zu legen, die durch Statorspulen geleitet werden sollen, um Induktionsströme zu verstärken, die in Rotorspulen erzeugt werden, um dadurch eine Erhöhung des Drehmoments einer rotierenden elektrischen Maschine auch in einem Bereich niedriger Drehzahlen zu ermöglichen. Jedoch haben die Erfinder gefunden, dass ohne die Entwicklung eines Verfahrens für eine Induktionsstromüberlagerung die Spitzenwerte von Strömen, die durch die Statorspulen fließen, sehr hoch werden und dass dies zu Nachteilen führen kann, beispielsweise zu einer Vergrößerung und Verteuerung eines Steuersystems, das einen Wechselrichter aufweist, bei dem es sich um eine Antriebseinheit für eine rotierende elektrische Maschine handelt.
-
Im Gegensatz dazu beschreiben die veröffentlichte japanische Patentanmeldung Nr. 2007-185082 (
JP-A-2007-185082 ), die veröffentlichte japanische Patentanmeldung Nr. 2010-98908 (
JP-A-98908 ) und die veröffentlichte japanische Patentanmeldung Nr. 2010-110079 (
JP-A-110079 ) eine Feldwicklungs-Synchronmaschine, für die eine Impulsstromüberlagerung verwendet wird, jedoch beschreiben diese Veröffentlichungen keine Maßnahmen zur Erhöhung eines Drehmoments bei gleichzeitiger Verhinderung von zu starken Stromflüssen durch die Statorspulen.
-
Die Erfindung implementiert eine rotierende elektrische Maschine, die in der Lage ist, in einem Antriebssystem für eine rotierende elektrische Maschine ein Drehmoment auch in einem niedrigen Drehzahlbereich zu erhöhen und gleichzeitig zu verhindern, dass zu starke Ströme durch Statorspulen fließen.
-
Ein erster Aspekt der Erfindung betrifft ein Antriebssystem einer rotierenden elektrischen Maschine, das aufweist: eine rotierende elektrische Maschine mit einem Stator und einem Rotor, die so angeordnet sind, dass sie einander zugewandt sind; eine Antriebseinheit, welche die rotierende elektrische Maschine antreibt; und eine Steuereinheit, welche die Antriebseinheit steuert. Der Stator weist auf: einen Statorkern mit einer Mehrzahl von Statornuten, die in Umfangsrichtung um eine Drehachse des Rotors voneinander beabstandet sind, und mehrphasige Statorspulen, die in einer konzentrierten Wicklung durch die Statornuten um den Statorkern gewickelt sind; der Rotor weist auf: einen Rotorkern mit einer Mehrzahl von Rotornuten, die in Umfangsrichtung um eine Drehachse des Rotors voneinander beabstandet sind, Rotorspulen, die an mehreren Umfangsrichtungsabschnitten des Rotorkerns auf solche Weise gewickelt sind, dass sie zumindest zum Teil in den Rotornuten angeordnet sind, und eine Gleichrichtereinheit, die mit den Rotorspulen verbunden ist und magnetische Eigenschaften der entsprechenden Rotorspulen unter der Mehrzahl von Rotorspulen in Umfangsrichtung abwechselnd ändert, und der Rotor ändert magnetische Eigenschaften von Magnetpolabschnitten an mehreren Umfangsrichtungsabschnitten in Umfangsrichtung abwechselnd, wobei die magnetischen Eigenschaften durch Ströme erzeugt werden, die durch die jeweiligen Rotorspulen fließen, und die Steuereinheit weist eine Abwärts-/Aufwärtsimpuls-Überlagerungseinheit auf zum Legen eines Abwärtsimpulsstroms für eine impulsförmige Abwärtswandlung über einen q-Achsenstrombefehl, um Ströme durch die Statorspulen zu leiten, um magnetische Feldflüsse in Richtungen zu erzeugen, die in Bezug auf Magnetpolrichtungen, bei denen es sich um Wicklungs-Mittelachsenrichtungen der jeweiligen Rotorspulen handelt, über einem elektrischen Winkel von 90 Grad nach vorne verschoben sind, und die einen Aufwärtsimpulsstrom für eine impulsförmige Aufwärtswandlung über einen d-Achsenstrombefehl legt, um Ströme durch die Statorspulen zu leiten, um magnetische Feldflüsse in den Magnetpolrichtungen zu erzeugen. Man beachte, dass unter einem Abwärtsimpulsstrom ein Impulsstrom zu verstehen ist, der auf impulsförmige Weise steil abfällt und dann steil ansteigt, und dass unter dem Aufwärtsimpulsstrom ein Impulsstrom zu verstehen ist, der auf impulsförmige Weise steil ansteigt und dann steil abfällt. Außerdem kann die Impulswellenform sowohl des Abwärtsimpulsstroms als auch des Aufwärtsimpulsstroms eine Rechteckswelle, eine Dreieckswelle oder eine Wellenform sein, die aus einer Mehrzahl von Kurven und/oder Linien besteht, die eine vorstehende Form bilden. Man beachte, dass „Rotorkern” ein integrales Bauteil im Rotor außer den Rotorspulen bezeichnet, das beispielsweise aus Magneten und einem Rotorkernkörper, der aus magnetischem Material gebildet ist, bestehen kann. Außerdem sind die „Rotornuten” nicht auf Abschnitte beschränkt, die eine Kerbenform haben und die zur Randfläche des Rotorkerns hin offen sind, und schließen beispielsweise auch Schlitze ein, die nicht zur Randfläche des Rotorkerns hin offen sind und die so ausgebildet sind, dass sie in der axialen Richtung innen durch den Rotorkern verlaufen.
-
Mit dem Antriebssystem einer rotierenden elektrischen Maschine kann eine rotierende elektrische Maschine verwirklicht werden, die in der Lage ist, auch in einem niedrigen Drehzahlbereich ein Drehmoment zu erhöhen und gleichzeitig zu verhindern, dass zu starke Ströme durch die Statorspulen fließen. Das heißt, durch Überlagern des q-Achsenstrombefehls mit einem Abwärtsimpulsstrom und durch Überlagern des d-Achsenstrombefehls mit einem Aufwärtsimpulsstrom können Induktionsströme, die in den Rotorspulen auftreten, verstärkt werden, während bewirkt wird, dass Ströme aller drei Phasen im erforderlichen Strombeschränkungsbereich liegen. Außerdem wird ein Aufwärtsimpulsstrom über den d-Achsenstrombefehl gelegt, so dass es möglich ist, den Umfang von Schwankungen von Magnetflüssen, die durch die d-Achsenmagnetpfade fließen, die vom d-Achsenstrombefehl erzeugt werden, zu verstärken. Die d-Achsenmagnetpfade sind in der Lage, den Durchgang von Magnetflüssen durch einen Luftspalt im Vergleich zu den q-Achsenmagnetpfaden, die dem q-Achsenstrombefehl entsprechen, zu verringern, wodurch der magnetische Widerstand abnimmt. Daher ist die Erhöhung des Schwankungsumfangs in d-Achsenmagnetflüssen wirksam zur Verstärkung des Drehmoments. Somit ist es möglich, Induktionsströme, die in den Rotorspulen erzeugt werden, auch in einem Bereich niedriger Drehzahl zu verstärken, während die Spitzen von Statorströmen aller Phasen niedrig gehalten werden, daher ist es möglich, das Drehmoment der rotierenden elektrischen Maschine zu verstärken.
-
Die Abwärts-/Aufwärtsimpuls-Überlagerungseinheit kann den Aufwärtsimpulsstrom über den d-Achsenstrombefehl legen und den Abwärtsimpulsstrom nicht über den q-Achsenstrombefehl legen, wenn ein Ausgangsdrehmoment der rotierenden elektrischen Maschine unter oder bei einem Schwellenwert liegt, und kann den Aufwärtsimpulsstrom über den d-Achsenstrombefehl legen und den Abwärtsimpulsstrom über den q-Achsenstrombefehl legen, wenn das Ausgangsdrehmoment den Schwellenwert übersteigt.
-
Die Abwärts-/Aufwärtsimpulsstrom-Überlagerungseinheit kann den Abwärtsimpulsstrom über den q-Achsenstrombefehl legen und kann den Aufwärtsimpulsstrom über den d-Achsenstrombefehl legen, so dass ein Stromvektor nach Überlagerung von Statorströmen, die durch die Statorspulen geleitet werden sollen, mit dem Impulsstrom in einem Steuerzirkelkreis liegt, der von einem distalen Ende eines Stromvektors beschrieben wird, der in einem d-q-Koordinatensystem definiert ist, wenn der Impulsstrom nicht über die Statorströme gelegt wird.
-
Jede von den Rotorspulen kann mit irgendeinem von den Gleichrichterelementen verbunden sein, die als Gleichrichtereinheit dienen und deren Vorwärtsrichtungen zwischen irgendwelchen zwei in der Umfangsrichtung des Rotors benachbarten Rotorspulen einander entgegengesetzt sind, und die Gleichrichterelemente können Ströme gleichrichten, die durch induzierte elektromotorische Kräfte erzeugt werden und durch die Rotorspulen fließen sollen, um dadurch Phasen von Strömen, die durch irgendwelche zwei in der Umfangsrichtung benachbarte Rotorspulen fließen, zwischen einer A-Phase und einer B-Phase abwechselnd zu ändern.
-
Die Gleichrichterelemente können ein erstes Gleichrichterelement und ein zweites Gleichrichterelement sein, die jeweils mit den entsprechenden Rotorspulen verbunden sind, und das erste Gleichrichterelement und das zweite Gleichrichterelement können unabhängig voneinander Ströme, die aufgrund der erzeugten induzierten elektromotorischen Kräfte erzeugt werden, gleichrichten, so dass die gleichgerichteten Ströme durch die entsprechenden Rotorspulen fließen, und können die magnetischen Eigenschaften der Magnetpolabschnitte an mehreren Umfangsrichtungsabschnitten in Umfangsrichtung abwechselnd ändern, wobei die magnetischen Eigenschaften durch Ströme erzeugt werden, die durch die entsprechenden Rotorspulen fließen.
-
Der Rotorkern kann ausgeprägte bzw. Schenkelpole aufweisen, bei denen es sich um die Mehrzahl von Magnetpolabschnitten handelt, die bezogen auf die Umfangsrichtung des Rotors mit Abständen zueinander angeordnet sind und zum Stator hin vorstehen, und die Schenkelpole können magnetisiert werden, wenn Ströme, die von der Gleichrichtereinheit gleichgerichtet werden, durch die Rotorspulen fließen, um dadurch als Magnete zu fungieren, die feste Magnetpole aufweisen.
-
Der Rotorkern kann Schenkelpole aufweisen, bei denen es sich um die Mehrzahl von Magnetpolabschnitten handelt, die bezogen auf die Umfangsrichtung des Rotorkerns mit Abständen zueinander angeordnet sind und zum Stator hin vorstehen, und die Schenkelpole können magnetisiert werden, wenn Ströme, die von der Gleichrichtereinheit gleichgerichtet werden, durch die Rotorspulen fließen, um dadurch als Magnete zu fungieren, die feste Magnetpole aufweisen, und der Rotor kann ferner Hilfsrotorspulen aufweisen, die an proximalen Abschnitten der jeweiligen Schenkelpole gewickelt sind, irgendwelche zwei von den Hilfsrotorspulen, die um irgendwelche zwei in der Umfangsrichtung des Rotors benachbarte Schenkelpole gewickelt sind, können in Reihe miteinander verbunden sein, um einen Hilfs-Spulensatz zu bilden, und die einen Enden von irgendwelchen zwei benachbarten Rotorspulen, die um irgendwelche zwei bezogen auf die Umfangsrichtung des Rotors benachbarte Schenkelpole gewickelt sind, können an einem Verbindungspunkt über die jeweils entsprechenden Gleichrichterelemente miteinander verbunden sein, so dass die jeweils entsprechenden Gleichrichterelemente einander aus entgegengesetzten Richtungen zugewandt sind, die anderen Enden der irgendwelchen zwei benachbarten Rotorspulen, die um irgendwelche zwei in der Umfangsrichtung des Rotors benachbarte Schenkelpole gewickelt sind, können mit einem Ende des Hilfs-Spulensatzes verbunden sein, und der Verbindungspunkt kann mit dem anderen Ende des Hilfs-Spulensatzes verbunden sein.
-
Eine Breite jedes Schenkelpols in der Umfangsrichtung des Rotors kann kleiner sein als eine Breite, die einem elektrischen Winkel von 180° entspricht, und jede von den Rotorspulen kann mit verkürzter Schrittweite um einen der Schenkelpole gewickelt sein.
-
Eine Breite jeder Rotorspule in der Umfangsrichtung des Rotors kann einer Breite gleich sein, die einem elektrischen Winkel von 90° entspricht.
-
Mit dem Antriebssystem einer rotierenden elektrischen Maschine gemäß dem Aspekt der Erfindung kann die rotierende elektrische Maschine verwirklicht werden, die in der Lage ist, ein Drehmoment auch in einem niedrigen Drehzahlbereich zu erhöhen, während sie gleichzeitig verhindert, dass zu starke Ströme durch die Statorspulen fließen.
-
KURZE BESCHREIBUNG DER ZEICHNUNGEN
-
Merkmale und Vorteile sowie die technische und industrielle Bedeutung von Ausführungsbeispielen der Erfindung werden nachstehend mit Bezug auf die begleitenden Zeichnungen beschrieben, in denen gleiche Bezugszahlen gleiche Elemente bezeichnen, und in denen:
-
1 eine Ansicht ist, die einen schematischen Aufbau eines Antriebssystems einer rotierenden elektrischen Maschine gemäß einer Ausführungsform der Erfindung zeigt;
-
2 eine schematische Ansicht ist, die einen Teil eines Abschnitts zeigt, in dem ein Stator einem Rotor in einer Ausführungsform der Erfindung zugewandt ist;
-
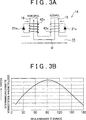
3A eine schematische Ansicht ist, die einen Zustand zeigt, in dem ein Magnetfluss in dem Rotor in der Ausführungsform der Erfindung verläuft;
-
3B ein Graph ist, der das Ergebnis zeigt, das durch Berechnen der Amplitude eines mit einer Rotorspule verketteten Magnetflusses erhalten wird, während die Umfangsichtungsbreite θ der Rotorspule in der rotierenden elektrischen Maschine, die in 2 dargestellt ist, geändert wird;
-
4 ein Blockschema ist, das den Aufbau eines Controllers in der Ausführungsform der Erfindung zeigt;
-
5A ein Zeitschema ist, das ein Beispiel für zeitabhängige Veränderungen in Statorströmen unter Verwendung eines überlagerten d-Achsenstrombefehlswerts Idsum*, eines überlagerten q-Achsenstrombefehlswerts Iqsum* und jedes Phasenstroms in der Ausführungsform der Erfindung zeigt;
-
5B ein Zeitschema ist, das eine zeitabhängige Veränderung von Rotorstrom, der in den Rotorspulen erzeugt wird, entsprechend 5A zeigt;
-
6 ein Zeitschema ist, das Zeitpunkte t1 und t2 darstellt, zu denen mit der Überlagerung von Dreiphasen-Statorströmen mit Impulsstrom in der Ausführungsform der Erfindung begonnen wird;
-
7A eine schematische Ansicht ist, die einen Zustand zeigt, in dem Magnetflüsse durch den Stator und den Rotor verlaufen, wenn ein q-Achsenstrom in der Ausführungsform der Erfindung auf einen festen Wert eingestellt ist;
-
7B eine schematische Ansicht ist, die einen Zustand zeigt, in dem Magnetflüsse in einer ersten Halbperiode durch den Stator und den Rotor fließen, wenn ein Abwärtsimpulsstrom über einen q-Achsenstrom gelegt wird;
-
7C eine schematische Ansicht ist, die einen Zustand zeigt, in dem Magnetflüsse in einer zweiten Halbperiode durch den Stator und den Rotor fließen, wenn ein Abwärtsimpulsstrom über einen q-Achsenstrom gelegt wird;
-
8 eine schematische Ansicht ist, die einen Zustand zeigt, wo Magnetflüsse wegen des d-Achsenstroms durch den Stator und den Rotor in der Ausführungsform der Erfindung fließen;
-
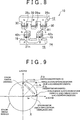
9 ein Graph ist, der Stromvektoren vor und nach der Überlagerung mit Impulsstrom in der Ausführungsform der Erfindung zeigt;
-
10 ein Graph ist, der die Beziehung zwischen der Drehzahl und dem Drehmoment der rotierenden elektrischen Maschine zur Darstellung eines Beispiels zeigt, in dem ein Impulsstrom-Überlagerungszustand in der Ausführungsform der Erfindung geändert wird;
-
11 eine Ansicht ist, die eine andere Ausführungsform der Erfindung zeigt und die 3A entspricht;
-
12 eine Ansicht ist, die eine Ersatzschaltung von Rotorspulen und Hilfsrotorspulen in der Ausführungsform von 11 zeigt;
-
13 eine schematische Querschnitts-Teilansicht ist, die einen Abschnitt, in dem ein Stator einem Rotor zugewandt ist, in einer anderen Ausführungsform der Erfindung zeigt;
-
14 eine schematische Ansicht ist, die einen Rotor eines anderen Gestaltungsbeispiels der rotierenden elektrischen Maschine zeigt, welche die Ausführungsform der Erfindung darstellt;
-
15 eine schematische Ansicht ist, die einen Rotor eines anderen Gestaltungsbeispiels der rotierenden elektrischen Maschine zeigt, welche die Ausführungsform der Erfindung darstellt;
-
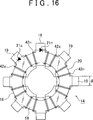
16 eine schematische Ansicht ist, die einen Rotor eines anderen Gestaltungsbeispiels der rotierenden elektrischen Maschine zeigt, welche die Ausführungsform der Erfindung darstellt;
-
17 eine schematische Ansicht ist, die ein anderes Gestaltungsbeispiel der rotierenden elektrischen Maschine zeigt, welche die Ausführungsform der Erfindung darstellt, betrachtet in der Richtung, die parallel ist zur Drehachse des Rotors;
-
18 eine schematische Ansicht ist, die den Rotor des Gestaltungsbeispiels von 17 darstellt;
-
19 eine schematische Ansicht ist, die einen Rotor eines anderen Gestaltungsbeispiels der rotierenden elektrischen Maschine zeigt, welche die Ausführungsform der Erfindung darstellt;
-
20 eine schematische Ansicht ist, die einen Rotor eines anderen Gestaltungsbeispiels der rotierenden elektrischen Maschine zeigt, welche die Ausführungsform der Erfindung darstellt;
-
21 eine schematische Ansicht ist, die einen Rotor eines anderen Gestaltungsbeispiels der rotierenden elektrischen Maschine zeigt, welche die Ausführungsform der Erfindung darstellt;
-
22 eine schematische Ansicht ist, die einen Rotor eines anderen Gestaltungsbeispiels der rotierenden elektrischen Maschine zeigt, welche die Ausführungsform der Erfindung darstellt;
-
23 eine Ansicht ist, die den schematischen Aufbau eines Stators und eines Rotors zeigt, die aus einer Richtung betrachtet werden, die parallel ist zur Drehachse des Rotors, in einer existierenden rotierenden elektrischen Maschine;
-
24 eine Ansicht ist, die den schematischen Aufbau des Stators in der rotierenden elektrischen Maschine von 23 darstellt;
-
25 eine Ansicht ist, die den schematischen Aufbau des Stators in der rotierenden elektrischen Maschine von 23 darstellt; und
-
26 ein Graph ist, der ein Beispiel für die Beziehung zwischen einer Rotordrehzahl und einem Motordrehmoment in dem gleichen Aufbau wie dem der rotierenden elektrischen Maschine von 23 darstellt.
-
AUSFÜHRLICHE BESCHREIBUNG VON AUSFÜHRUNGSFORMEN
-
1 bis 8 und 10 sind Ansichten, die eine Ausführungsform der Erfindung darstellen. 1 ist eine Ansicht, die den schematischen Aufbau eines Antriebssystems einer rotierenden elektrischen Maschine gemäß der Ausführungsform zeigt. 2 ist eine schematische Ansicht, die einen Teil eines Abschnitts zeigt, in dem ein Stator einem Rotor in der Ausführungsform zugewandt ist. 3A ist eine schematische Ansicht, die einen Zustand zeigt, in dem ein Magnetfluss durch den Rotor in der Ausführungsform fließt. 3B ist ein Graph, der das Ergebnis zeigt, das durch Berechnen der Amplitude eines Magnetflusses, der mit einer Rotorspule verkettet ist, erhalten wird, während die Umfangsichtungsbreite θ der Rotorspule geändert wird, in der rotierenden elektrischen Maschine, die in 2 dargestellt ist. 4 ist ein Blockschema, das den Aufbau eines Controllers in der Ausführungsform zeigt. Wie in 1 dargestellt ist, weist ein Antriebssystem 34 einer rotierenden elektrischen Maschine gemäß der Ausführungsform eine rotierende elektrische Maschine 10, einen Wechselrichter 36, einen Controller 38 und eine elektrische Speichervorrichtung 40 auf. Der Wechselrichter 36 ist eine Antriebseinheit, die die rotierende elektrische Maschine 10 antreibt. Der Controller 38 ist eine Steuereinheit, die den Wechselrichter 36 steuert. Die elektrische Speichervorrichtung 40 ist eine Leistungsquelle. Das Antriebssystem 34 einer rotierenden elektrischen Maschine treibt die rotierende elektrische Maschine 10 an. Außerdem weist die elektrische Maschine 10, die als ein Elektromotor oder als ein Generator dient, einen Stator 12 und einen Rotor 14 auf, wie in 2 dargestellt ist. Der Stator 12 ist an einem (nicht dargestellten) Gehäuse festgelegt. Der Rotor 14 ist bezogen auf die radiale Richtung weiter innen als der Stator 12 so angeordnet, dass er dem Stator 12 mit einer vorgegebenen Lücke dazwischen zugewandt ist, und kann sich in Bezug auf den Stator 12 drehen. Man beachte, dass „radiale Richtung” eine Ausstrahlungsrichtung bedeutet, die senkrecht ist zur Drehachse des Rotors (im Folgenden ist die Bedeutung von „radiale Richtung” die gleiche, solange nichts anderes angegeben ist).
-
Außerdem weist der Stator 12 einen Statorkern 26 und mehrphasige (genauer zum Beispiel dreiphasige, d. h. U-Phasen-, V-Phasen- und W-Phasen-) Statorspulen 28u, 28v und 28w auf. Der Statorkern 26 besteht aus einem magnetischen Material. Die Statorspulen 28u, 28v und 28w sind am Statorkern 26 angeordnet. Zähne 30 sind an mehreren Umfangsrichtungsabschnitten des Statorkerns 26 angeordnet. Die Zähne 30 sind eine Mehrzahl von Statorzähnen, die bezogen auf die radiale Richtung zur Innenseite vorstehen (zum Rotor 14 (23)). Eine Nut 31, bei der es sich um eine Statornut handelt, ist jeweils zwischen benachbarten Zähnen 30 ausgebildet. Man beachte, dass „Umfangsrichtung” eine Richtung entlang des Kreises bedeutet, der um die zentrale Drehachse des Rotors beschrieben wird (im Folgenden ist die Bedeutung von „Umfangsrichtung” gleich, wenn nicht etwas anderes angegeben ist).
-
Das heißt, die Mehrzahl von Zähnen 30, die bezogen auf die radiale Richtung zur Innenseite (zum Rotor 14) vorstehen, sind auf der Innenrandfläche des Statorkerns 26 bezogen auf die Umfangsrichtung mit Abständen zueinander um die zentrale Drehachse angeordnet, bei der es sich um die Drehachse des Rotors 14 handelt, und die Nuten 31, die jeweils zwischen benachbarten Zähnen 30 ausgebildet sind, sind bezogen auf die Umfangsrichtung mit Abständen zueinander ausgebildet. Das heißt, der Statorkern 26 weist eine Mehrzahl von Nuten 31 auf, die bezogen auf die Umfangsrichtung mit Abständen zueinander um die Drehachse des Rotors 14 ausgebildet sind.
-
Die dreiphasigen Statorspulen 28u, 28v und 28w sind mit verkürzter Schrittweite konzentriert durch die Nuten 31 um die entsprechenden Zähne 30 des Statorkerns 26 gewickelt. Auf diese Weise sind die Statorspulen 28u, 28v und 28w um die entsprechenden Zähne 30 gewickelt, um Magnetpole zu bilden. Weiter werden mehrphasige Wechselströme durch die mehrphasigen Statorspulen 28u, 28v und 28w geschickt, um die Zähne 30, die in der Umfangsrichtung auf einer Linie liegen, zu magnetisieren. Dadurch können magnetische Drehfelder, die in der Umfangsrichtung drehen, im Stator 12 erzeugt werden. Man beachte, dass die Statorspulen aufbaumäßig nicht so beschränkt sind, dass die Statorspulen auf diese Weise um die entsprechenden Zähne des Stators gewickelt sind; die Statorspulen können auch auf andere Weise als um die Zähne um den Statorkern gewickelt sein.
-
Die drehenden Magnetfelder, die in den Zähnen 30 gebildet werden, werden von den distalen Endflächen der Zähne 30 aus an den Rotor 14 angelegt. In dem in 2 dargestellten Beispiel wird ein Polpaar aus den drei Zähnen 30 gebildet, um die jeweils die dreiphasigen (U-Phasen-, V-Phasen- und W-Phasen-)Statorspulen 28u, 28v und 28w gewickelt sind.
-
Außerdem weist der Rotor 14 einen Rotorkern 16, der aus einem magnetischen Material besteht, und eine Mehrzahl von Rotorspulen 42n und 42s auf. Zähne 19 sind an mehreren Umfangrichtungsabschnitten der Außenrandfläche des Rotorkerns 16 so vorgesehen, dass sie in der radialen Richtung zur Außenseite (zum Stator 12) vorstehen, und sind mit Abständen zueinander entlang der Außenrandfläche des Rotorkerns 16 angeordnet. Die Zähne 19 sind eine Mehrzahl von Magnetpolabschnitten (Vorsprünge und Schenkelpole) und sind Rotorzähne. Die Zähne 19 sind dem Stator 12 zugewandt. Außerdem sind Nuten 20, von denen jede eine Rotornut zwischen jeweils benachbarten Zähnen 19 des Rotorkerns 16 ist, bezogen auf die Umfangsrichtung mit Abständen zueinander ausgebildet. Das heißt, der Rotorkern 16 weist die Mehrzahl von Nuten 20 auf, die bezogen auf die Umfangsrichtung mit Abständen zueinander um die Drehachse des Rotors 14 ausgebildet sind.
-
Wegen der Zähne 19 ändern sich magnetische Widerstände in dem Fall, wo Magnetflüsse vom Stator 12 (von den Zähnen 30) aus verlaufen, mit der Drehrichtung des Rotors 14. Ein magnetischer Widerstand ist an der Position der einzelnen Zähne 19 niedrig, und ein magnetischer Widerstand ist an der Position zwischen jeweils benachbarten Zähnen 19 hoch. Weiter sind die Rotorspulen 42n und 42s so um diese Zähne 19 gewickelt, dass die Rotorspulen 42n und die Rotorspulen 42s in der Umfangsrichtung abwechselnd ausgerichtet sind. Hierbei fällt die Wicklungsmittelachse von jeder der Rotorspulen 42n und 42s mit der radialen Richtung zusammen.
-
Außerdem sind die in Mehrzahl vorhandenen ersten Rotorspulen 42n durch konzentrierte Wicklung um bezogen auf die Umfangsrichtung des Rotors 14 jeweils übernächste Zähne 19 gewickelt, und die in Mehrzahl vorhandenen Rotorspulen 42 sind durch konzentrierte Wicklung um die jeweils anderen Zähne 19 gewickelt. Die anderen Zähne 19 sind den Zähnen 19, um die die ersten Rotorspulen 42n gewickelt sind, benachbart und es handelt sich dabei um bezogen auf die Umfangsrichtung jeweils übernächste Zähne. Außerdem sind Dioden 21n und 21s mit einer ersten Rotorspulenschaltung 44 bzw. einer zweiten Rotorspulenschaltung 46 verbunden. Die erste Rotorspulenschaltung 46 beinhaltet die Mehrzahl von ersten Rotorspulen 42n. Die zweite Rotorspulenschaltung 46 beinhaltet die Mehrzahl von zweiten Rotorspulen 42s. Das heißt, die in Mehrzahl vorhandenen ersten Rotorspulen 42n, die bezogen auf die Umfangsrichtung des Rotors 14 abwechselnd angeordnet sind, sind miteinander elektrisch in Reihe verbunden und sind endlos verbunden, und die Diode 21n ist an einem Abschnitt zwischen irgendwelchen zwei aus der Mehrzahl von ersten Rotorspulen 42n mit jeder von den ersten Rotorspulen 42n in Reihe verbunden, um dadurch die erste Rotorspulenschaltung 44 zu bilden. Die Diode 21n ist eine Gleichrichtereinheit (ein Gleichrichterelement) und ist eine erste Diode. Die ersten Rotorspulen 42n sind um die Zähne 19 gewickelt, die als die gleichen Magnetpole (Nordpole) fungieren.
-
Außerdem sind die in Mehrzahl vorhandenen zweiten Rotorspulen 42s miteinander elektrisch in Reihe verbunden und endlos verbunden, und die Diode 21s ist an einem Abschnitt zwischen beliebigen zwei aus der Mehrzahl von zweiten Rotorspulen 42s mit jeder von den zweiten Rotorspulen 42s in Reihe verbunden, um dadurch die zweite Rotorspulenschaltung 46 zu bilden. Die Diode 21s ist eine Gleichrichtereinheit (ein Gleichrichterelement) und ist eine zweite Diode. Die zweiten Rotorspulen 42s sind um die Zähne 19 gewickelt, die als die gleichen Magnetpole (Südpole) fungieren. Außerdem sind die Rotorspulen 42n und 42s, die um bezogen auf die Umfangsrichtung jeweils benachbarte Zähne 19 gewickelt sind (die Magnete mit verschiedenen Magnetpolen bilden), elektrisch gegeneinander isoliert. Auf diese Weise sind die Rotorspulen 42n und 42s an mehreren Umfangsrichtungsabschnitten des Außenrandabschnitts des Rotorkerns 16 auf solche Weise gewickelt, dass sie zum Teil in den entsprechenden Nuten 20 angeordnet sind.
-
Außerdem sind die Gleichrichtungsrichtungen, in denen Ströme, die durch die Rotorspulen 42n und 42s fließen, jeweils von den Dioden 21n und 21s gleichgerichtet werden, entgegengesetzt, so dass in bezogen auf die Umfangsrichtung jeweils benachbarten Zähnen 19 des Rotors 14 Magnete mit unterschiedlichen Magnetpolen gebildet werden. Das heißt, die Dioden 21n und 21s sind mit den Rotorspulen 42n und 42s jeweils in einander entgegensetzten Richtungen auf solche Weise verbunden, dass die Richtungen von elektrischen Strömen, die jeweils durch irgendwelche zwei in Umfangsrichtung des Rotors 14 benachbarte Rotorspulen 42n und 42s fließen (die Gleichrichtungsrichtungen der jeweiligen Dioden 21n und 21s), das heißt die Vorwärtsrichtungen, einander entgegengesetzt sind. Weiter sorgen die Dioden 21n und 21s jeweils für eine Gleichrichtung von elektrischen Strömen, die wegen der induzierten elektromotorischen Kräfte, die von vom Stator 12 erzeugten drehenden Magnetfeldern, welche räumliche harmonische Schwingungen enthalten, erzeugt werden, durch die entsprechenden Rotorspulen 42n und 42s fließen. Dadurch wechseln sich die Phasen von Strömen, die durch irgendwelche zwei in Umfangsrichtung des Rotors 14 benachbarte Rotorspulen 42n und 42s fließen, zwischen einer A-Phase und einer B-Phase ab. Die A-Phase dient dazu, den Nordpol auf der Seite des distalen Endes eines entsprechenden einen von den Zähnen 19 auszubilden. Die B-Phase dient dazu, den Südpol auf der Seite des distalen Endes eines entsprechenden einen von den Zähnen 19 auszubilden. Das heißt, die Gleichrichterelemente, die für den Rotor 14 vorgesehen sind, sind die Diode 21n, bei der es sich um ein erstes Gleichrichterelement handelt, und die Diode 21s, bei der es sich um zweites Gleichrichterelement handelt. Die Diode 21n und die Diode 21s sind jeweils mit den entsprechenden Rotorspulen 42n und 42s verbunden. Außerdem sorgen die Dioden 21n und 21s jeweils unabhängig für eine Gleichrichtung von Strömen, die wegen der erzeugten induktiven elektromotorischen Kräfte durch die entsprechenden Rotorspulen 42n und 42s fließen, und bewirken, dass sich die magnetischen Eigenschaften der Zähne 19 an mehreren Umfangsrichtungsabschnitten in Umfangsrichtung abwechseln. Die magnetischen Eigenschaften der Zähne 19 werden von Strömen erzeugt, die durch die jeweiligen Rotorspulen 42n und 42s fließen. Auf diese Weise ändern die in Mehrzahl vorhandenen Dioden 21n und 21s die magnetischen Eigenschaften in Umfangsrichtung abwechselnd. Die magnetischen Eigenschaften werden in den in Mehrzahl vorhandenen Zähnen 19 jeweils von in den Rotorspulen 42n und 42s erzeugten induzierten elektromotorischen Kräften erzeugt. Das heißt, die Dioden 21n und 21s sind mit den entsprechenden Rotorspulen 42n und 42s verbunden und ändern die magnetischen Eigenschaften der jeweiligen Rotorspulen 42n und 42s in Umfangsrichtung abwechselnd unter den in Mehrzahl vorhandenen Rotorspulen 42n und 42s. Mit diesem Aufbau kann anders als im Falle des Aufbaus, der in 23 bis 25 dargestellt ist, die Anzahl der Dioden 21n und 21s auf zwei verringert werden, so dass die Spulenstruktur des Rotors 14 vereinfacht werden kann. Außerdem ist der Rotor 14 auf der bezogen auf die radiale Richtung äußeren Seite einer Drehwelle 22 konzentrisch befestigt (siehe 23, 25 und dergleichen, in 2 nicht dargestellt). Die Drehwelle 22 ist von einem (nicht dargestellten) Gehäuse drehbar gelagert. Man beachte, dass in der vorliegenden Ausführungsform die Gleichrichterelemente mit den entsprechenden Rotorspulen 42n und 42s verbunden sind; jedoch muss in dem Aspekt der Erfindung lediglich die Gleichrichtereinheit, die dafür sorgt, dass sich die magnetischen Eigenschaften der Rotorspulen in der Umfangsrichtung unter den in Mehrzahl vorhandenen Rotorspulen abwechseln, mit den Rotorspulen verbunden sein, und die Gleichrichtereinheit kann einen Aufbau haben, der anders ist als die Gleichrichterelemente. Man beachte, dass die Rotorspulen 42n und 42s über Isolatoren oder dergleichen, die aus elektrisch isolierende Eigenschaften aufweisendem Harz oder dergleichen bestehen, um die entsprechenden Zähne 19 gewickelt sein können.
-
Außerdem ist die Breite θ von jeder der Rotorspulen 42n und 42s in der Umfangsrichtung des Rotors 14 so eingerichtet, dass sie kleiner ist als die Breite, die einem elektrischen Winkel des Rotors von 180° entspricht, und die Rotorspulen 42n und 42s sind jeweils mit verkürzten Schrittweiten um die Zähne 19 gewickelt. Stärker bevorzugt ist die Breite θ von jeder von den Rotorspulen 42n und 42s in der Umfangsrichtung des Rotors 14 der Breite, die einem elektrischen Winkel des Rotors 14 von 90° entspricht, gleich oder im Wesentlichen gleich. Hierbei kann die Breite θ von jeder von den Rotorspulen 42n und 42s durch die Mittenbreite des Querschnitts von jeder von den Rotorspulen 42n und 42s bei Betrachtung der Querschnittsfläche von jeder von den Rotorspulen 42n und 42s ausgedrückt werden. Das heißt, die Breite θ von jeder von den Rotorspulen 42n und 42s kann durch den Mittelwert der Breite der Innenrandfläche und der Breite der Außenrandfläche von jeder von den Rotorspulen 42n und 42s ausgedrückt werden. Man beachte, dass der elektrische Winkel des Rotors 14 durch einen Wert ausgedrückt wird, der durch Multiplizieren des mechanischen Winkels des Rotors 14 mit der Zahl p der Polpaare des Rotors 14 erhalten wird (elektrischer Winkel = mechanischer Winkel × p). Daher erfüllt die Umfangsrichtungsbreite θ von jeder von den Rotorspulen 42n und 42s den folgenden mathematischen Ausdruck (1), wo r der Abstand von der zentralen Drehachse des Rotors 14 zu jeder von den Rotorspulen 42n und 42s ist. θ < π × r/p (1) Der Grund dafür, dass die Breite θ durch den mathematischen Ausdruck (1) beschränkt wird, wird weiter unten ausführlich erklärt.
-
Außerdem ist die elektrische Speichervorrichtung 40, wie in 1 dargestellt, als Gleichstrom-Leistungsquelle vorgesehen. Die elektrische Speichervorrichtung 40 kann aufgeladen und entladen werden und besteht zum Beispiel aus einer Sekundärbatterie. Der Wechselrichter 36 weist drei Arme, d. h. U-Phasen-, V-Phasen- und W-Phasenarme, Au, Av und Aw, auf. In jedem von den Armen mit den drei Phasen, Au, Av und Aw, sind zwei Schaltelemente Sw in Reihe miteinander verbunden. Die Schaltelemente Sw sind Transistoren, IGBTs oder dergleichen. Außerdem ist eine Diode Di antiparallel mit jedem von den Schaltelementen Sw verbunden. Ferner sind die Mittelpunkte der Arme Au, Av und Aw jeweils mit einem Ende der Statorspulen 28u, 28v bzw. 28w der entsprechenden Phase, aus denen die rotierende elektrische Maschine 10 besteht, verbunden. Von den Statorspulen 28u, 28v und 28w sind die Statorspulen von gleicher Phase in Reihe miteinander verbunden, und die Statorspulen 28u, 28v und 28w von verschiedenen Phasen sind an einem Sternpunkt miteinander verbunden.
-
Außerdem sind die Seite einer positiven Elektrode und die Seite einer negativen Elektrode der elektrischen Speichervorrichtung 40 jeweils mit der Seite einer positiven Elektrode und der Seite einer negativen Elektrode 36 des Wechselrichters 36 verbunden, und ein Kondensator 68 ist parallel zum Wechselrichter 36 zwischen die elektrische Speichervorrichtung 40 und den Wechselrichter 36 geschaltet. Der Controller 38 berechnet zum Beispiel das Soll-Drehmoment der rotierenden elektrischen Maschine 10 als Reaktion auf ein Beschleunigungsbefehlssignal, das zum Beispiel von einem (nicht dargestellten) Gaspedalsensor eines Fahrzeugs eingegeben wird, und steuert dann Schaltoperationen der Schaltelemente Sw auf Basis eines Strombefehlswerts gemäß dem Soll-Drehmoment und dergleichen. Signale, die Stromwerte anzeigen, die von Stromsensoren 70 erfasst werden, welche für Statorspulen mindestens zweier Phasen (zum Beispiel 28u und 28v) von den dreiphasigen Statorspulen vorgesehen sind, und ein Signal, das den Drehwinkel des Rotors 14 der rotierenden elektrischen Maschine 10 anzeigt, der von einer Drehwinkel-Erfassungseinheit 82 (2), beispielsweise einem Drehmelder, erfasst wird, werden in den Controller 38 eingegeben. Der Controller 38 beinhaltet einen Mikrocomputer, der eine CPU, einen Speicher und dergleichen aufweist. Der Controller 38 steuert das Schalten der Schaltelemente Sw des Wechselrichters 36, um das Drehmoment der rotierenden elektrischen Maschine 10 zu regeln. Der Controller 38 kann aus einer Mehrzahl von Controller bestehen, die nach Funktion aufgeteilt sind.
-
Der so aufgebaute Controller 38 ist in der Lage, Gleichstromleistung von der elektrischen Speichervorrichtung 40 durch die Schaltoperationen der Schaltelemente Sw, die Bestandteile des Wechselrichters 36 sind, in Wechselstromleistung von drei Phasen, U, V und W, umzuwandeln, um die dreiphasigen Statorspulen 28u, 28v und 28w mit Leistung der entsprechenden Phasen zu versorgen. Mit dem solchermaßen aufgebauten Controller 38 kann das Drehmoment des Rotors 14 (2) durch Steuern der Phasen (Vorwärtsverschiebungen) von Wechselströmen, die durch die Statorspulen 28u, 28v und 28w fließen, geregelt werden.
-
Außerdem werden mit der in 2 dargestellten rotierenden elektrischen Maschine 10 von den drehenden Magnetfeldern Induktionsströme in den Rotorspulen 42n und 42s erzeugt, wodurch bewirkt werden kann, dass der Rotor 14 ein Drehmoment erzeugt. Die drehenden Magnetfelder werden vom Stator 12 erzeugt und beinhalten räumliche Harmonische. Das heißt, die Verteilung von magnetomotorischen Kräften, die bewirken, dass der Stator 12 drehende Magnetfelder erzeugt, ist keine sinusförmige Verteilung (mit nur der Fundamentalen), sondern beinhaltet aufgrund der Anordnung der dreiphasigen Statorspulen 28u, 28v und 28w und der Form des Statorkerns 26 wegen der Zähne 30 und der Nuten 31 harmonische Komponenten. Insbesondere überschneiden sich die dreiphasigen Statorspulen 28u, 28v und 28w in der konzentrierten Wicklung nicht, so dass die Höhe der Amplitude von harmonischen Komponenten, die in der Verteilung der magnetomotorischen Kraft des Stators 12 auftreten, zunimmt. Wenn die Statorspulen 28u, 28v und 28w zum Beispiel von einer dreiphasigen konzentrierten Wicklung gebildet werden, nimmt die Höhe der Amplitude einer sekundären räumlichen Komponente, bei der es sich um die (temporäre) tertiäre Komponente von eingegebener elektrischer Frequenz handelt, als harmonische Komponenten zu. Die harmonischen Komponenten, die wegen der Anordnung der Statorspulen 28u, 28v und 28w und der Form des Statorkerns 26 auf diese Weise in magnetomotorischen Kräften auftreten, werden als räumliche Harmonische bezeichnet.
-
Wenn die dreiphasigen Wechselströme, die durch die dreiphasigen Statorspulen 28u, 28v und 28w geschickt werden, um zu bewirken, dass die drehenden Magnetfelder (die fundamentalen Komponenten), die in den Zähnen 30 gebildet werden, an den Rotor 14 angelegt werden, werden die Zähne 19 außerdem auf solche Weise von den drehenden Magnetfeldern der Zähne 30 angezogen, dass der magnetische Widerstand des Rotors 14 sinkt. Dadurch wirkt ein Drehmoment (eine Trägheitsmoment) auf den Rotor 14.
-
Da die drehenden Magnetfelder, die in den Zähnen 30 gebildet werden und räumliche Harmonische enthalten, mit den Rotorspulen 42n und 42s des Rotors 14 verkettet sind, treten ferner wegen der räumlichen harmonischen Komponenten Magnetflussschwankungen mit anderer Frequenz als die Drehfrequenz (die fundamentalen Komponenten der drehenden Magnetfelder) des Rotors 14 in den Rotorspulen 42n und 42s auf. Wegen der Magnetflussschwankungen werden induzierte elektromotorische Kräfte in den Rotorspulen 42n und 42s erzeugt. Mit den erzeugten elektromotorischen Kräften werden Ströme, die durch die Rotorspulen 42n und 42s fließen, von den Dioden 21n und 21s jeweils gleichgerichtet, so dass sie nur eine Richtung aufweisen (Gleichstrom). Dann werden die Zähne 19, bei denen es sich um die Rotorzähne handelt, magnetisiert, wenn Gleichströme, die von den Dioden 21n und 21s gleichgerichtet werden, durch die Rotorspulen 42n und 42s fließen. Dadurch fungiert jeder von den Zähnen 19 als Magnet mit einem festen Magnetpol (entweder dem Nordpol oder dem Südpol). Wie oben beschrieben, sind die Gleichrichtungsrichtungen, in denen Ströme, die durch die Rotorspulen 42n und 42s fließen, von den Dioden 21n und 21s gleichgerichtet werden, einander entgegengesetzt, so dass Magnete, die in den jeweiligen Zähnen 19 erzeugt werden, so sind, dass die Nordpole und die Südpole in der Umfangsrichtung abwechselnd angeordnet sind. Dann wechselwirken die Magnetfelder der Zähne 19 (Magnete mit festen Magnetpolen) mit den drehenden Magnetfeldern (fundamentalen Komponenten), die vom Stator 12 erzeugt werden, um Anziehungs- und Abstoßungswirkungen zu erzeugen. Ein Drehmoment (das dem magnetischen Moment entspricht) kann selbst durch elektromagnetische Wechselwirkung (Anziehungs- und Abstoßungswirkungen) zwischen den drehenden Magnetfeldern (den fundamentalen Komponenten), die vom Stator 12 und den Magnetfeldern der Zähne 19 (Magnete) erzeugt werden, an den Rotor 14 angelegt werden, und der Rotor 14 wird synchron mit den drehenden Magnetfeldern (den fundamentalen Komponenten), die vom Stator 12 erzeugt werden, drehend angetrieben. Auf diese Weise kann die rotierende elektrische Maschine 10 als Elektromotor fungieren, der elektrische Leistung nutzt, die zu den Statorspulen 28u, 28v und 28w geliefert wird, um zu bewirken, dass der Rotor 14 elektrische Leistung (mechanische Leistung) erzeugt.
-
In diesem Fall sind die verschiedenen Dioden 21n und 21s im Rotor 14 jeweils mit den Rotorspulen 42n und 42s verbunden, die um bezogen auf die Umfangsrichtung jeweils benachbarte Zähne 19 des Rotors 14 gewickelt sind. Die drehenden Magnetfelder, die vom Stator 12 (2) erzeugt werden und Harmonische enthalten, sind mit den Rotorspulen 42n und 42s verkettet. Dadurch werden Induktionsströme, deren Richtungen von den Dioden 21n und 21s reguliert werden, in den Rotorspulen 42n und 42s induziert, und die Zähne 19 werden zwischen jeweils benachbarten Zähnen 19 als unterschiedliche Magnetpolabschnitte magnetisiert. In diesem Fall verläuft ein Magnetfluss, der durch einen Induktionsstrom verursacht wird, durch die Zähne 19 und einen Abschnitt des Rotorkerns 16 außer den Zähnen 19 in der Richtung, die vom Pfeil α in 3A angegeben wird.
-
Außerdem wird das Antriebssystem 34 einer rotierenden elektrischen Maschine, das in 1 dargestellt ist, in einem Hybridfahrzeug, einem Brennstoffzellen-Fahrzeug, einem Elektrofahrzeug oder dergleichen als Fahrzeugantriebsleistung erzeugende Vorrichtung eingebaut und verwendet. Das Hybridfahrzeug beinhaltet einen Verbrennungsmotor und einen Antriebsmotor als Antriebsquellen. Man beachte, dass es auch in Frage kommt, dass ein Gleichspannungswandler, bei dem es sich um eine Spannungswandlungseinheit handelt, zwischen die elektrische Speichervorrichtung 40 und den Wechselrichter 36 geschaltet wird, und die Spannung der elektrischen Speichervorrichtung 40 hochtransformiert und zum Wechselrichter geliefert wird.
-
Außerdem weist der Controller 38 des Antriebssystems 34 einer rotierenden elektrischen Maschine eine Abwärts-/Aufwärtsimpuls-Überlagerungseinheit 72 auf (4). Die Abwärts-/Aufwärtsimpuls-Überlagerungseinheit 72 legt einen Abwärtsimpulsstrom für eine impulsförmige Abwärtswandlung über einen q-Achsenstrombefehl zum Leiten von Strömen durch die Statorspulen 28u, 28v und 28w auf solche Weise, dass magnetische Feldflüsse in q-Achsenrichtungen erzeugt werden (später beschrieben), und legt einen Aufwärtsimpulsstrom für eine impulsförmige Aufwärtswandlung über einen d-Achsenstrombefehl zum Leiten Strömen durch die Statorspulen 28u, 28v und 28w auf solche Weise, dass magnetische Feldflüsse in d-Achsenrichtungen erzeugt werden (später beschrieben). Dies wird ausführlich mit Bezug auf 4 beschrieben. 4 ist eine Ansicht, die den Aufbau einer Wechselrichter-Steuereinheit im Controller 38 zeigt. Der Controller 38 weist auf: eine (nicht dargestellte) Strombefehl-Berechnungseinheit, die Abwärts-/Aufwärtsimpuls-Überlagerungseinheit 72, Subtrahierungseinheiten 74 und 75, PI-Operationseinheiten 76 und 77, eine Dreiphasen-Zweiphasen-Wandlungseinheit 78, eine Zweiphasen-Dreiphasen-Wandlungseinheit 80, die Drehwinkel-Erfassungseinheit 82, eine PWM-Signalerzeugungseinheit (nicht dargestellt) und eine Gate-Schaltung (nicht dargestellt).
-
Die Strombefehl-Berechnungseinheit berechnet Strombefehlswerte Id* und Iq*, die der d-Achse und der q-Achse entsprechen, entsprechend einer vorbereiteten Tabelle und dergleichen auf Basis des Drehmomentbefehlswerts der rotierenden elektrischen Maschine 10, der als Reaktion auf einen Beschleunigungsbefehl berechnet wird, der von einem Nutzer eingegeben wird. Hierbei bedeutet die d-Achse eine Magnetpolrichtung, bei der es sich um die auf die Umfangsrichtung bezogene Mittelachsenrichtung der Wicklung jeder einzelnen von den Rotorspulen 42n und 42s der rotierenden elektrischen Maschine 10 handelt, und die q-Achse bedeutet eine Richtung, die um einen elektrischen Winkel von 90 Grad in Bezug auf die d-Achse vorverlegt ist. Wenn die Drehrichtung des Rotors 14 beispielsweise definiert ist wie in 2 dargestellt, sind die d-Achsenrichtung und die q-Achsenrichtung von der Beziehung definiert, die von den Pfeilen in 2 angegeben ist. Außerdem sind die Strombefehlswerte Id* und Iq* ein d-Achsenstrombefehlswert, bei dem es sich um einen Befehlswert für eine d-Achsenstromkomponente handelt, bzw. ein q-Achsenstrombefehlswert, bei dem es sich um einen Befehlswert für eine q-Achsenstromkomponente handelt. Somit werden die d-Achse und die q-Achse verwendet, um eine Bestimmung der Ströme, die durch die Statorspulen 28u, 28v und 28w geschickt werden sollen, durch eine Vektorsteuerung zu ermöglichen.
-
Die Dreiphasen-Zweiphasen-Wandlungseinheit 78 berechnet einen d-Achsenstromwert Id und einen q-Achsenstromwert Iq, bei denen es sich um zweiphasige Ströme handelt, aus dem Drehwinkel θ der rotierenden elektrischen Maschine 10, der von der Drehwinkel-Erfassungseinheit 82 erfasst wird, die für die rotierende elektrische Maschine 10 vorgesehen ist, und den zweiphasigen Strömen (zum Beispiel V-Phasen- und W-Phasenströmen Iv und Iw), die von den Stromsensoren 70 erfasst werden. Man beachte, dass der Grund dafür, dass von den Stromsensoren 70 nur zweiphasige Ströme erfasst werden, der ist, dass die Summe der zweiphasigen Ströme (des d-Achsenstromwerts Id und des q-Achsenstromwerts Iq) 0 ist und daher der andere Phasenstrom berechnet werden kann. Jedoch ist es genauso gut denkbar, dass die U-Phasen-, V-Phasen- und W-Phasenströme erfasst werden und dann der d-Achsenstromwert Id und der q-Achsenstromwert Iq aus diesen Stromwerten berechnet werden.
-
Die Abwärts-/Aufwärtsimpuls-Überlagerungseinheit 72 weist eine Abwärts-/Aufwärtsimpuls-Erzeugungseinheit 84 und Addierungseinheit 86 und 87 auf. Die Abwärts-/Aufwärtsimpuls-Erzeugungseinheit 84 erzeugt einen Abwärtsimpulsstrom, der über einen q-Achsenstrom gelegt werden soll, und einen Aufwärtsimpulsstrom, der über einen d-Achsenstrom gelegt werden soll. Die Addierungseinheiten 86 und 87 werden verwendet, um einen Aufwärtsimpulsstrom und einen Abwärtsimpulsstrom über einen d-Achsenstrom bzw. einen q-Achsenstrom zu legen. Die Addierungseinheit 86 für den d-Achsenstrom legt in festgelegten Abständen einen Aufwärtsimpulsstrom Idp* über einen d-Achsenstrombefehlswert Id* bzw. addiert ihn dazu, und gibt nach der Addition dann einen überlagerten d-Achsenstrombefehlswert Idsum* an die entsprechende Subtrahierungseinheit 74 aus. Die Addierungseinheit 87 für den q-Achsenstrom legt in festgelegten Abständen einen Abwärtsimpulsstrom Iqp* über einen q-Achsenstrombefehlswert Id* bzw. addiert ihn dazu, und gibt nach der Addition dann einen überlagerten q-Achsenstrombefehlswert Iqsum* an die entsprechende Subtrahierungseinheit 75 aus. Außerdem ermittelt die Subtrahierungseinheit 74, die der d-Achse entspricht, eine Abweichung δId zwischen dem überlagerten d-Achsenstrombefehlswert Idsum* und dem d-Achsenstrom Id, der von der Dreiphasen-Zweiphasen-Umwandlungseinheit 78 umgewandelt wird, und gibt dann die Abweichung δId in die PI-Operationseinheit 76 ein, die der d-Achse entspricht.
-
Außerdem ermittelt die Subtrahierungseinheit 75, die der q-Achse entspricht, eine Abweichung δIq zwischen dem überlagerten q-Achsenstrombefehlswert Iqsum* und dem q-Achsenstrom Iq, der von der Dreiphasen-Zweiphasen-Umwandlungseinheit 78 umgewandelt wird, und gibt dann die Abweichung δIq in die PI-Operationseinheit 77 ein, die der q-Achse entspricht. Die PI-Operationseinheiten 76 und 77 führen jeweils eine PI-Operation über den eingegebenen Abweichungen δId und δIq mit einer vorgegebenen Verstärkung durch, um Regelungsabweichungen zu ermitteln, und berechnen dann einen d-Achsen-Spannungsbefehlswert Vd* und einen q-Achsen-Spannungsbefehlswert Vq*, die den Regelungsabweichungen entsprechen.
-
Die Zweiphasen-Dreiphasen-Umwandlungseinheit 80 wandelt die Spannungsbefehlswerte Vd* und Vq*, die von den PI-Operationseinheiten 76 und 77 eingegeben werden, unter Verwendung eines vorausgesagten Winkels, der aus dem Drehwinkel θ der rotierenden elektrischen Maschine 10 ermittelt wird und der als eine Position 1,5 Steuerintervalle später vorausgesagt wird, in drei U-Phasen-, V-Phasen- und W-Phasen-Spannungsbefehlswerte Vu, Vv und Vw um. Die Spannungsbefehlswerte Vu, Vv und Vw werden von einer (nicht dargestellten) PWM-Signalerzeugungseinheit in PWM-Signale umgewandelt, und die PWM-Signale werden an die (nicht dargestellte) Gate-Schaltung ausgegeben. Die Gate-Schaltung wählt die Schaltelemente Sw aus, an die die Steuersignale angelegt werden, um dadurch Ein/Aus-Zustände der Schaltelemente Sw zu steuern. Auf diese Weise wandelt der Controller 38 Statorströme, die durch die Statorspulen 28u, 28v und 28w fließen, in ein d-q-Achsen-Koordinatensystem um, um eine d-Achsenstromkomponente und eine q-Achsenstromkomponente zu ermitteln, und steuert den Wechselrichter 36 so, dass er in der Lage ist, durch eine Vektorsteuerung einschließlich einer Rückkopplungsregelung die Statorströme mit den jeweiligen Phasen zu erhalten, die dem angestrebten Drehmoment entsprechen.
-
5A ist ein Zeitschema, das ein Beispiel für zeitabhängige Veränderungen in Statorströmen unter Verwendung eines überlagerten d-Achsenstrombefehlswerts Idsum*, eines überlagerten q-Achsenstrombefehlswerts Iqsum* und jedes Phasenstroms in der Ausführungsform zeigt. 5B ist ein Zeitschema, das entsprechend 5A eine zeitabhängige Veränderung eines Rotorstroms zeigt, der in den Rotorspulen erzeugt wird. Man beachte, dass 5A und 5B Simulierungsergebnisse zeigen, während eine extrem kurze Zeitspanne zeitlich gedehnt wird, das heißt, in der horizontalen Richtung in den Zeichnungen gedehnt wird. Somit bilden die U-Phasen-, V-Phasen- und W-Phasenströme eigentlich jeweils Sinuswellen, wenn die rotierende elektrische Maschine angetrieben wird; jedoch sind diese drei Phasenströme in 5A vor und nach der Überlagerung des Impulsstroms linear dargestellt. Man beachte, dass in der folgenden Beschreibung gleiche Bezugszahlen Komponenten bezeichnen, die den Elementen, die in 1 bis 4 dargestellt sind, gleich sind.
-
Wie in 5A dargestellt ist, legt die Abwärts-/Aufwärtsimpuls-Überlagerungseinheit 72, die in 4 dargestellt ist, einen Aufwärtsimpulsstrom über den d-Achsenstrombefehlswert Id* und legt gleichzeitig einen Abwärtsimpulsstrom über den q-Achsenstrombefehlswert Iq*. Sowohl für den d-Achsenstrombefehlswert Id* als auch den q-Achsenstrombefehlswert Iq* wird ein Stromwert, über den kein Impulsstrom gelegt worden ist, entsprechend einem Drehmomentbefehl berechnet. Auf diese Weise wird ein Strombefehl, der auf impulsförmige Weise abnimmt und dann zunimmt, von der Abwärts-/Aufwärtsimpuls-Überlagerungseinheit 72 in festgelegten Abständen über den q-Achsenstrombefehlswert Iq* gelegt, und ein Strombefehl, der auf impulsförmige Weise zunimmt und dann abnimmt, wird von der Abwärts-/Aufwärtsimpuls-Überlagerungseinheit 72 über den d-Achsenstrombefehlswert Id* gelegt. Man beachte, dass selbst dann, wenn ein Impulsstrom als rechteckige Wellenform befohlen wird, wie in 5A dargestellt, der Impulsstrom wegen einer Ansprechverzögerung eigentlich eine impulsförmige Wellenform aufweisen kann, die Kurven kombiniert, wie von den durchbrochenen Linien β angegeben. Außerdem kann die impulsförmige Wellenform sowohl des Aufwärtsimpulsstroms als auch des Abwärtsimpulsstroms eine rechteckige Welle, eine dreieckige Welle oder eine Wellenform sein, die aus einer Mehrzahl von Kurven und/oder Linien zu einer vorstehenden Form gebildet ist.
-
Wenn der Impulsstrom auf diese Weise übergelegt wird, kann beispielsweise eine Änderung des Stroms, der durch zumindest eine Phasenspule des Stators fließt, verstärkt werden, während die Spitzenwerte von Strömen auch dann unterdrückt werden, wenn der maximale Strom durch eine Phasenspule des Stators fließt, gleiche Ströme jeweils durch die anderen beiden Phasenspulen des Stators fließen und die Summe der gleichen Ströme, die durch die beiden anderen Phasenspulen des Stators fließen, durch die eine Phasenspule des Stators fließt. Als Beispiel zeigt das untere Zeitschema von 5A den Fall, wo der maximale Strom durch die W-Phasen-Statorspulen 28w fließt, gleiche Ströme jeweils durch die beiden anderen, U-Phasen- und V-Phasen-Statorspulen 28u und 28v fließen und die Summe der gleichen Ströme, die durch die beiden anderen, U-Phasen- und V-Phasen-Statorspulen 28u und 28v fließen, durch die W-Phasen-Statorspule 28w fließt. 6 ist ein Zeitschema, das Zeitpunkte t1 und t2 darstellt, zu denen in der Ausführungsform mit der Überlagerung von Dreiphasen-Statorströmen mit Impulsstrom begonnen wird; Wie in 6 dargestellt ist, sind die Phasen der Dreiphasen-Statorströme um 120☐ zueinander versetzt. Im Gegensatz dazu wird in 5A und 5B Impulsstrom zum Zeitpunkt t1, t2, ..., zu dem der W-Phasen-Statorstrom minimal ist, über den d-Achsenstrombefehl Id* und den q-Achsenstrombefehl Iq* gelegt. Man beachte, dass in der folgenden Beschreibung ein Impulsstrom zu den Zeitpunkten t1 und t2 in 6 übergelegt wird; jedoch soll die Ausführungsform den Zeitpunkt, zu dem ein Impulsstrom übergelegt wird, nicht beschränken. In 6 wird ein Impulsstrom in festgelegten Abständen ta übergelegt.
-
In diesem Fall zeigt der Pfeil γ einen Stromgrenzbereich an und die durchbrochenen Linien P und Q sind die zulässigen Stromgrenzen, die hinsichtlich des Designs notwendig sind. Das heißt, Stromwerte müssen auf Basis der Beziehung zwischen den Komponenten, beispielsweise einer Kapazität, des Wechselrichters 36, zwischen den gestrichelten Linien P und Q zu liegen kommen. Weiter liegt ein Stromwert, der durch die W-Phasen-Statorspulen 28w fließt, nahe an einer der zulässigen Stromgrenzen. In diesem Fall kann durch Überlagern mit einem Aufwärtsimpulsstrom und einem Abwärtsimpulsstrom eine Änderung in mindestens einem Phasenstrom (beispielsweise dem V-Phasenstrom) vergrößert werden, während bewirkt wird, dass Ströme aller drei Phasen im erforderlichen Stromgrenzbereich (γ-Bereich) liegen. Daher werden Änderungen in Magnetflüssen von räumlichen harmonischen Komponenten, die in den drehenden Magnetfeldern enthalten sind, die vom Stator 12 erzeugt werden, mit Stromänderungen größer. In diesem Fall nimmt Strom, der durch die W-Phasenstatorspulen 28w fließt und der nahe an einem der zulässigen Grenzwerte ist, zur Mitte des Stromgrenzwerts hin ab, und Strom, der durch die U-Phasenstatorspule 28u fließt und der weit weg von den zulässigen Grenzwerten ist, wird stärker, aber das Maß der Zunahme kann verringert werden. Daher können Induktionsströme, die in den Rotorspulen 42n und 42s auftreten, verstärkt werden, während verhindert wird, dass zu starke Ströme durch sämtliche Statorspulen 28u, 28v und 28w fließen Darüber hinaus wird der Aufwärtsimpulsstrom Idp* über den d-Achsenstrombefehl Id* gelegt, so dass es möglich ist, den Umfang von Schwankungen von Magnetflüssen, die durch die d-Achsenmagnetpfade fließen und die vom d-Achsenstrombefehl Id* erzeugt werden, zu verstärken. Die d-Achsenmagnetpfade sind in der Lage, den Durchgang von Magnetflüssen durch eine Lücke, bei der es sich um einen Luftspalt zwischen dem Stator 12 und dem Rotor 14 handelt, im Vergleich zu den q-Achsenmagnetpfaden, die dem q-Achsenstrombefehl entsprechen, zu verringern, wodurch der magnetische Widerstand abnimmt. Daher werden Änderungen in Magnetflüssen von räumlichen harmonischen Komponenten, die in den drehenden Magnetfeldern enthalten sind, die vom Stator 12 erzeugt werden, mit Stromänderungen größer. Somit wird der Rotorstrom stärker, wie in 5B dargestellt ist, und das Motordrehmoment nimmt zu. Außerdem kann bewirkt werden, dass Dreiphasenströme im Stromgrenzbereich liegen (dem Bereich des Pfeiles γ in 5A). Somit ist es möglich, Induktionsströme, die in den Rotorspulen 42n und 42s erzeugt werden, auch in einem Bereich niedriger Drehzahl zu verstärken, während die Spitzen von Statorströmen aller Phasen niedrig gehalten werden, daher ist es möglich, das Drehmoment der rotierenden elektrischen Maschine 10 zu verstärken.
-
Dies wird ausführlich mit Bezug auf 7A bis 7C und 8 beschrieben. In 7A bis 7C und 8 werden Variationen von magnetischen Flüssen aufgrund eines q-Achsenstroms (7A bis 7C) und Variationen in Magnetflüssen aufgrund eines d-Achsenstroms (8) getrennt beschrieben. 7A bis 7C sind schematische Ansichten, die jeweils einen Zustand, in dem Magnetflüsse durch den Stator und den Rotor fließen, wenn ein q-Achsenstrom auf einen festen Wert eingestellt ist, einen Zustand, in dem Magnetflüsse durch den Stator und den Rotor fließen, wenn ein Abwärtsimpulsstrom über den q-Achsenstrom gelegt wird, in einer ersten Halbperiode bzw. einen Zustand, in dem Magnetflüsse durch den Stator und den Rotor fließen, wenn ein Abwärtsimpulsstrom über einen q-Achsenstrom gelegt wird, in einer zweiten Halbperiode zeigen. In jeder von 7A bis 7C sind die Zähne 30, um welche die Dreiphasen-Statorspulen 28u, 28v und 28w gewickelt sind, den Zähnen 19, um welche die Rotorspulen 42n und 42s gewickelt sind, radial nicht zugewandt, so dass einer von den Zähnen 30 der bezogen auf die Umfangsrichtung des Rotors 14 mittleren Position zwischen zwei benachbarten Zähnen 19 zugewandt ist. Wie von den durchgezogenen Pfeilen R1 und den gestrichelten Pfeilen R2 in 7A bis 7C angegeben ist, sind in diesem Zustand die Magnetflüsse, die durch den Stator 12 und den Rotor 14 fließen, q-Achsenmagnetflüsse.
-
7A entspricht dem A1-Zustand in 5A, wo der überlagerte q-Achsenstrombefehlswert Iqsum* ein fester Wert ist. 7B entspricht dem Zustand, wo ein Abwärtsimpulsstrom im überlagerten q-Achsenstrombefehlswert Iqsum* in einer ersten Halbperiode auftritt, das heißt, dem A2-Zustand in 5A, wo Iqsum* steil abfällt. Außerdem entspricht 7C dem Zustand, wo ein Abwärtsimpulsstrom im überlagerten q-Achsenstrombefehlswert Iqsum* in einer zweiten Halbperiode vorkommt, d. h. dem A3-Zustand in 5A, wo Iqsum* steil ansteigt.
-
Wie in 7A dargestellt ist, verlaufen in dem Zustand, wo der überlagerte q-Achsenstrombefehlswert Iqsum* ein fester Wert ist, bevor ein Abwärtsimpulsstrom auftritt, Magnetflüsse zuerst vom W-Phasenzahn 30 durch die „A”- und „B”-Zähne 19 über den Abstand zwischen den „A”- und „B”-Zähnen 19 und dann zu den U-Phasen- und V-Phasenzähnen 30. In diesem Fall fließen positive Ströme durch die U-Phasen- und V-Phasen-Statorspulen 28u und 28v, und ein starker negativer Strom fließt durch die W-Phasen-Statorspule 28w. In diesem Fall treten jedoch keine Änderungen der Magnetflüsse aufgrund der Fundamentalen auf, die durch jeden von den Zähnen 30 hindurchgeht.
-
Wie in 7B dargestellt ist, verändert sich im Gegensatz dazu in dem Zustand, wo ein Abwärtsimpulsstrom in der ersten Halbperiode auftritt, das heißt in dem Zustand, wo ein q-Achsenstrom steil abfällt, der absolute Wert des Stromes, der durch jede von den Statorspulen 28u, 28v und 28w fließt, so, dass er kleiner wird, und offensichtlich verlaufen Magnetflüsse wegen der Änderung in der entgegengesetzten Richtung zu 7A, wie von den durchbrochenen Pfeilen R2 dargestellt ist. Man beachte, dass für die Änderungen der Magnetflüsse die Vorzeichen der Statorstromwerte umgekehrt sein können, so dass die Magnetflüsse eigentlich in der Richtung verlaufen, die der von 7A entgegengesetzt ist. In jedem Fall verläuft der Magnetfluss in einer Richtung, in der er im Zahn 19 von „A” vom Nordpol zum Südpol wechselt, Induktionsstrom versucht, durch die Rotorspule 42n in einer Richtung zu fließen, die den Verlauf des Magnetflusses behindert, und der Verlauf des Induktionsstroms in Richtung des Pfeiles T in 7B wird von der Diode 21n nicht blockiert. Im Gegensatz dazu verläuft der Magnetfluss im Zahn 19 von „B” in der Richtung, die den Südpol verstärkt, und Induktionsstrom versucht, in der Richtung durch die Rotorspule 42s zu fließen, die den Verlauf des Magnetflusses behindert, das heißt, in der Richtung, in der der Zahn 19 von „B” in den Nordpol geändert wird; jedoch wird das Fließen von Induktionsstrom in dieser Richtung durch die Diode 21s blockiert, so dass kein Strom in der Region „B” fließt.
-
Wie in 7C dargestellt ist, ändert sich anschließend in einem Zustand, wo ein Abwärtsimpulsstrom in der zweiten Halbperiode auftritt, d. h. in einem Zustand, wo der q-Achsenstrom steil ansteigt, der absolute Wert des Stromes, der durch jede von den Statorspulen 28u, 28v und 28w fließt, so, dass er größer wird, und dann verlaufen Magnetflüsse in der Richtung, die zu der von 7B entgegengesetzt ist, wie von den durchgezogenen Pfeilen R1 angezeigt ist. In diesem Fall verläuft der Magnetfluss in der Richtung, die den Nordpol im Zahn 19 von „A” verstärkt, und Induktionsstrom versucht, in der Richtung durch die Rotorspule 42n zu fließen, um den Durchgang des Magnetflusses zu verhindern, das heißt, in der Richtung, um den Zahn 19 von „A” in den Südpol zu ändern (in der X-Richtung, die der der Diode 21n entgegengesetzt ist); jedoch ist in 7B bereits Strom geflossen, daher wird der Strom zumindest für eine bestimmte Zeitspanne schwächer, aber fließt in der Richtung, die der X-Richtung entgegengesetzt ist. Außerdem verläuft der Magnetfluss in der Richtung, die den Südpol in den Nordpol im Zahn 19 von „B” ändert, Induktionsstrom versucht, durch die Rotorspule 42s in der Richtung zu fließen, um den Verlauf des Magnetflusses zu behindern, und das Fließen des Induktionsstroms in Richtung des Pfeiles γ in 7C wird von der Diode 21s nicht blockiert.
-
Wenn der Abwärtsimpulsstrom 0 wird und wieder zu dem Zustand zurückkehrt, der in 7A dargestellt ist, werden außerdem Ströme, die durch die Rotorspulen 42n und 42s fließen, allmählich schwächer Obenstehend wurden Änderungen von q-Achsenmagnetflüssen, wenn ein Abwärtsimpulsstrom über den q-Achsenstrom gelegt wird, beschrieben; jedoch wird ein Aufwärtsimpulsstrom zum gleichen Zeitpunkt über den d-Achsenstrom gelegt, zu dem der Abwärtsimpulsstrom übergelegt wird. In diesem Fall fließen d-Achsenmagnetflüsse wie in 8 dargestellt. 8 ist eine schematische Ansicht, die einen Zustand in der Ausführungsform zeigt, wo Magnetflüsse wegen des d-Achsenstroms durch den Stator und den Rotor fließen; Das heißt, d-Achsenmagnetflüsse fließen wie vom Pfeil R3 in 8 dargestellt, wegen d-Achsenströmen der Statorspulen 28u, 28v und 28w. Der Pfeil R3 in 8 zeigt den Fluss in Vorwärtsrichtung der d-Achsenmagnetflüsse an. Die d-Achsenmagnetflüsse verlaufen vom V-Phasenzahn 30 durch den „B”-Zahn 19, das hintere Joch des Rotorkerns 16 und den „A”-Zahn 19 zum U-Phasenzahn 30. Auf diese Weise verlaufen die d-Achsenmagnetpfade, durch die die d-Achsenmagnetflüsse verlaufen, nicht über einen großen Luftspalt, anders als im Falle der q-Achsenmagnetpfade, durch die die q-Achsenmagnetflüsse verlaufen, wie in 7A bis 7C dargestellt ist, so dass ein großer Teil der Magnetflüsse hindurch gelassen wird, daher können Änderungen der Magnetflüsse verstärkt werden. Außerdem steigt der Verlauf von d-Achsenmagnetflüssen wegen des d-Achsenstroms steil an und fällt steil ab, wenn ein Aufwärtsimpulsstrom über den d-Achsenstrom gelegt wird. Wie aus 7B, 7C und 8 hervorgeht, wird somit, wenn man sowohl die d-Achsenmagnetflüsse als auch die q-Achsenmagnetflüsse in Betracht zieht, der V-Phasen-Statorstrom deutlich schwächer und wird dann wieder stärker, und der U-Phasen-Statorstrom wird mit einer geringen Steigerungsrate stärker und wird dann wieder schwacher. Infolgedessen wird ein Impulsstrom übergelegt, um die Dreiphasen-Statorströme zu ändern, wie in 5A dargestellt, und es ist möglich, eine Änderung des V-Phasen-Statorstroms zu verstärken, während bewirkt wird, dass die Statorströme aller Phasen im Stromgrenzbereich liegen, so dass es möglich ist, das Drehmoment der elektrischen Maschine 10 zu verstärken.
-
9 ist ein Graph, der Stromvektoren vor nach der Überlagerung mit Impulsstrom in der Ausführungsform zeigt; 9 zeigt Stromvektoren von Statorströmen in einem d-q-Koordinatensystem. In 9 zeigt der Stromvektor I ein Beispiel für einen Anfangs-Stromvektor, bevor ein Impulsstrom, der aus einem Soll-Drehmoment und dergleichen bestimmt wird, darüber gelegt wird. Außerdem ist der Stromvektor Ia ein Stromvektor, der auf solche Weise erhalten wird, dass im Anfangs-Stromvektor ein Aufwärtsimpulsstrom über einen d-Achsenstrom gelegt wird und ein Abwärtsimpulsstrom über einen q-Achsenstrom gelegt wird. Der Stromvektor ändert sich, wenn ein Impulsstrom auf diese Weise darüber gelegt wird. Jedoch wird auch in diesem Fall in der vorliegenden Ausführungsform ein Abwärtsimpulsstrom so über den q-Achsenstrombefehl gelegt, und ein Aufwärtsimpulsstrom wird so über den d-Achsenstrom gelegt, dass der Stromvektor Ia, nachdem der Impulsstrom über Statorströme gelegt worden ist, in einem Steuerzirkelkreis X liegt, der vom distalen Ende des Anfangs-Stromvektors beschrieben wird. Daher kann bewirkt werden, dass Statorströme im Stromgrenzbereich liegen. Im Gegensatz dazu zeigt der Stromvektor Ib einen Stromvektor, der gemäß einer Vergleichsausführungsform gestaltet ist, in der nur ein Aufwärtsimpulsstrom über einen d-Achsenstrom gelegt wird und kein Abwärtsimpulsstrom über einen q-Achsenstrom gelegt wird. In diesem Fall ist es offensichtlich, dass der Stromvektor Ib über den Steuerzirkelkreis hinausgeht und Statorströme den Stromgrenzbereich überschreiten.
-
Auf diese Weise legt in der vorliegenden Ausführungsform die Abwärts-/Aufwärtsimpuls-Überlagerungseinheit 72 des Controllers 38 einen Abwärtsimpulsstrom so über den q-Achsenstrombefehl und legt einen Aufwärtsimpulsstrom so über den d-Achsenstrombefehl, dass der Stromvektor Ia, nachdem der Impulsstrom über Statorströme gelegt worden ist, in dem Steuerzirkelkreis liegt, der vom distalen Ende des Anfangs-Stromvektors beschrieben wird, der im d-q-Koordinatensystem definiert ist, wenn kein Impulsstrom über Statorströme gelegt wird. Daher bestimmt die Abwärts-/Aufwärtsimpuls-Erzeugungseinheit 84, die in 4 dargestellt ist, den Aufwärtsimpulsstrom Idp* und den Abwärtsimpulsstrom Iqp* auf Basis des Strommoments und der Drehzahl der rotierenden elektrischen Maschine 10.
-
10 ist ein Graph, der die Beziehung zwischen der Drehzahl und dem Drehmoment der rotierenden elektrischen Maschine zeigt, um ein Beispiel darzustellen, in dem ein Impulsstrom-Überlagerungszustand in der Ausführungsform geändert wird. Wie in 10 dargestellt ist, kann in der vorliegenden Ausführungsform der Modus, in dem ein Impulsstrom übergelegt wird, in drei Stufen auf Basis des Bereichs der Drehzahl und des Drehmoments der rotierenden elektrischen Maschine 10 geändert werden. 10 zeigt die Beziehung zwischen der Drehzahl und dem Drehmoment der rotierenden elektrischen Maschine, wenn kein Impulsstrom übergelegt wird, in der vorliegenden Ausführungsform. In dem Bereich, in dem die Drehzahl niedrig ist, und der vom Pfeil Z dargestellt wird, besteht daher die Möglichkeit, dass das Drehmoment der rotierenden elektrischen Maschine aus dem Grund, der in der Kurzfassung der Erfindung beschrieben ist, abnimmt. Somit bestand in der Technik der Wunsch nach einer Erhöhung des Drehmoments im schraffierten Bereich von 10. Im Gegensatz dazu wird in der vorliegenden Ausführungsform, wenn die Beziehung zwischen einem Drehmoment und einer Drehzahl in einer H1-Region, einer H2-Region und einer H3-Region definiert ist, ein Impulsstrom auf verschiedene Weise entsprechend den jeweiligen Regionen über den d-Achsenstrom und/oder den q-Achsenstrom gelegt.
-
Zunächst führt in der H1-Region, das heißt, wenn die Drehzahl des Rotors 14 unter oder bei einer vorgegebenen Drehzahl (J min–1) liegt und das Ausgangsdrehmoment der rotierenden elektrischen Maschine 10 unter oder bei einem Schwellenwert (K1 Nm) liegt, die Abwärts-/Aufwärtsimpuls-Überlagerungseinheit 72 einen Aufwärtsimpulsmodus aus, in dem ein Aufwärtsimpulsstrom Idp* über den d-Achsenstrombefehl Id* gelegt wird, aber kein Abwärtsimpulsstrom über den q-Achsenstrombefehl Iq* gelegt wird. Wenn sich auf diese Weise ein Spielraum gegenüber den Stromgrenzen ergibt, ist der Aufwärtsimpulsmodus, der nur Änderungen der d-Achsenmagnetflüsse verwendet, in der Lage, Rotorströme zu induzieren.
-
Dagegen führt in der H2-Region, das heißt, wenn die Drehzahl des Rotors 14 unter oder bei einer vorgegebenen Drehzahl (J min–1) liegt und das Ausgangsdrehmoment der rotierenden elektrischen Maschine 10 höher ist als der Schwellenwert (K1 Nm) und niedriger ist als ein zweiter Schwellenwert (K2 Nm), die Abwärts-/Aufwärtsimpuls-Überlagerungseinheit 72 einen Abwärts-/Aufwärtsimpulsmodus aus, in dem ein Aufwärtsimpulsstrom Idp* über den d-Achsenstrombefehl Id* gelegt wird und ein Abwärtsimpulsstrom Iqp*über den q-Achsenstrombefehl Iq* gelegt wird. Wenn sich auf diese Weise ein geringer Spielraum gegenüber den Stromgrenzen gibt, ist der Abwärts-/Aufwärtsimpulsmodus, der Änderungen der d-Achsenmagnetflüsse und Änderungen der q-Achsenmagnetflüsse verwendet, in der Lage, Rotorströme innerhalb des Bereichs der Stromgrenzen zu induzieren.
-
Außerdem führt in der H3-Region, das heißt, wenn die Drehzahl des Rotors 14 unter oder bei einer vorgegebenen Drehzahl (J min–1) liegt und das Ausgangsdrehmoment der rotierenden elektrischen Maschine 10 den zweiten Schwellenwert (K2 Nm) überschreitet, die Abwärts-/Aufwärtsimpuls-Überlagerungseinheit 72 einen Abwärtsimpulsmodus aus, in dem ein Abwärtsimpulsstrom Iqp* über den q-Achsenstrombefehl Iq* gelegt wird, aber kein Aufwärtsimpulsstrom über den d-Achsenstrombefehl Id* gelegt wird. Wenn auf diese Weise eine Annäherung an die Stromgrenzen stattfindet, wird der Abwärtsimpulsmodus verwendet, der nur Änderungen der q-Achsenmagnetflüsse verwendet, so dass alle Dreiphasen-Statorströme zur Mitte des Stromgrenzbereichs hin geändert werden, um eine Erhöhung des Drehmoments zu ermöglichen, während eine Verstärkung des Stroms verhindert wird.
-
Man beachte, dass in der obigen Beschreibung der Modus, in dem ein Impulsstrom übergelegt wird, in drei Stufen geändert wird, das heißt in der H1-Region, der H2-Region und der H3-Region; statt dessen kann der Modus, in dem der Impulsstrom übergelegt wird, in zwei Schritten geändert werden, das heißt, in der H1-Region und der H2-Region. In diesem Fall führt die Abwärts-/Aufwärtsimpuls-Überlagerungseinheit 72 den Aufwärtsimpulsmodus aus, in dem ein Aufwärtsimpulsstrom über den d-Achsenstrombefehl gelegt wird, aber kein Abwärtsimpulsstrom über den q-Achsenstrombefehl gelegt wird, wenn die Drehzahl des Rotors 14 unter oder bei der vorgegebenen Drehzahl liegt und das Ausgangsdrehmoment unter oder bei einem Schwellenwert liegt, und führt den Abwärts-/Aufwärtsimpulsmodus durch, in dem ein Aufwärtsimpulsstrom über den d-Achsenstrombefehl gelegt wird und ein Abwärtsimpulsstrom über den q-Achsenstrombefehl gelegt wird, wenn das Ausgangsdrehmoment den Schwellenwert überschreitet. Man beachte, dass, wenn der Modus, in dem der Impulsstrom übergelegt wird, in den oben angegebenen drei Schritten oder zwei Schritten geändert wird, der Modus, in dem ein Impulsstrom übergelegt wird, auf Basis des Ausgangsdrehmoments geändert werden kann, ohne die Bedingung der Drehzahl zu definieren.
-
Mit dem oben beschriebenen Antriebssystem einer rotierenden elektrischen Maschine kann die rotierende elektrische Maschine verwirklicht werden, die in der Lage ist, auch in einem niedrigen Drehzahlbereich ein Drehmoment zu erhöhen und gleichzeitig zu verhindern, dass zu starke Ströme durch die Statorspulen 28u, 28v und 28w fließen. Das heißt, durch Überlagern des q-Achsenstrombefehls mit einem Abwärtsimpulsstrom und durch Überlagern des d-Achsenstrombefehls mit einem Aufwärtsimpulsstrom können Induktionsströme, die in den Rotorspulen 42n und 42s auftreten, verstärkt werden, während bewirkt wird, dass Ströme aller drei Phasen im erforderlichen Strombeschränkungsbereich liegen. Außerdem wird ein Aufwärtsimpulsstrom über den d-Achsenstrombefehl gelegt, so dass es möglich ist, den Umfang von Schwankungen von Magnetflüssen, die durch die d-Achsenmagnetpfade fließen, die vom d-Achsenstrombefehl erzeugt werden, zu verstärken. Die d-Achsenmagnetpfade sind in der Lage, den Durchgang von Magnetflüssen durch einen Luftspalt im Vergleich zu den q-Achsenmagnetpfaden, die dem q-Achsenstrombefehl entsprechen, zu verringern, wodurch der magnetische Widerstand abnimmt. Daher ist die Erhöhung des Schwankungsumfangs in d-Achsenmagnetflüssen wirksam zur Verstärkung des Drehmoments. Somit ist es möglich, Induktionsströme, die in den Rotorspulen 42n und 42s erzeugt werden, auch in einem Bereich niedriger Drehzahl zu verstärken, während die Spitzen von Statorströmen aller Phasen niedrig gehalten werden, daher ist es möglich, das Drehmoment der rotierenden elektrischen Maschine zu verstärken. Dadurch wird beispielsweise eine Vergrößerung der Kapazität jedes Schaltelements des Wechselrichters 36 verhindert, daher ist es möglich, die Kosten und die Größe eines Steuersystems, einschließlich des Wechselrichters 36, zu verringern. Außerdem ist es nicht nötig, den Erfassungsbereich jedes Sensors für eine Stromsteuerung zu erweitern, daher ist es möglich, die Größe jedes Sensors zu verringern und die Erfassungsgenauigkeit jedes Sensors effektiv zu erhöhen. Außerdem ist es nicht nötig, Magnete für den Rotor 14 bereitzustellen, daher kann eine Gestaltung ohne Magnete und mit hohem Drehmoment erreicht werden.
-
Im Gegensatz dazu werden im Falle der Synchronmaschine, die in
JP-A-2007-185082 beschrieben ist, Elektromagnete des Rotors unter Verwendung von Impulsstrom gebildet; jedoch sind die Rotorspulen am Außenrandabschnitt des Rotors so vorgesehen, dass sie sich in der radialen Richtung erstrecken, und jeweils ein Gleichrichterelement ist mit jeder Rotorspule verbunden, um zwei verschiedene Magnetpole an den in radialer Richtung entgegengesetzten Seiten des Rotors zu bilden. Daher löschen sich Induktionsströme, die zwei Magnetpole ausbilden, gegenseitig aus, auch wenn ein Impuls über einen q-Achsenstrom gelegt wird, daher können in den Rotorspulen keine Induktionsströme erzeugt werden. Das heißt, mit diesem Aufbau ist es unmöglich, durch Überlagern des q-Achsenstroms mit einem Impulsstrom ein Drehmoment zu erzeugen.
-
Außerdem wird im Falle der Synchronmaschine, die in
JP-A-2010-98908 beschrieben ist, ein Aufwärtsimpulsstrom, der auf impulsartige Weise zunimmt und dann abnimmt, über einen d-Achsenstrom und einen q-Achsenstrom gelegt, daher können die Spitzenwerte von Strömen, die durch die Statorspulen fließen, sehr groß werden. Außerdem wird im Falle der Synchronmaschine, die in
JP-A-2010-11079 beschrieben ist, zum Zwecke der Implementierung der rotierenden elektrischen Maschine, die in der Lage ist, ein Drehmoment auch in einem niedrigen Drehzahlbereich zu erhöhen und gleichzeitig zu verhindern, dass sehr starke Ströme durch die Statorspule fließen, keine Vorrichtung zur Überlagerung von q-Achsenstrom mit einem Abwärtsimpulsstrom beschrieben.
-
Außerdem wird in der vorliegenden Ausführungsform die Breite θ von jeder von den Rotorspulen 42n und 42s in Umfangsrichtung des Rotors 14 reguliert wie im obigen mathematischen Ausdruck (1) beschrieben, so dass es möglich ist, induzierte elektromotorische Kräfte aufgrund der räumlichen Harmonischen der drehenden Magnetfelder, die in den Rotorspulen 42n und 42s erzeugt werden, zu verstärken. Das heißt, die Amplitude (Fluktuationsbreite) von Magnetflüssen, die mit den Rotorspulen 42n und 42s verkettet sind, aufgrund von räumlichen Harmonischen wird von der auf die Umfangsrichtung des Rotors 14 bezogenen Breite θ von jeder von den Rotorspulen 42n und 42s beeinflusst. Hier zeigt 3B das Ergebnis der Berechnung der Amplitude (Fluktuationsbreite) von Magnetflüssen, die mit den Rotorspulen 42n und 42s verkettet sind, während die Breite θ von jeder der Rotorspulen 42n und 42s in der Umfangsrichtung geändert wird. 3B zeigt die Spulenbreite θ im elektrischen Winkel. Wie in 3B dargestellt ist, wird die Fluktuationsbreite von Magnetflüssen, die mit den Rotorspulen 42n und 42s verkettet sind, umso größer, je kleiner die Spulenbreite θ ausgehend von 180° wird, daher wird die Spulenbreite θ kleiner als 180° gemacht, das heißt, die Rotorspulen 42n und 42s werden mit verkürzten Wickelschritten bzw. als Sehnenwicklung gebildet, damit dadurch die Amplitude von verketteten Magnetflüssen aufgrund von räumlichen Harmonischen im Vergleich zu einer Durchmesserwicklung vergrößert werden kann.
-
Somit ist in der rotierenden elektrischen Maschine 10 (2) die Umfangsrichtungsbreite von jedem der Zähne 19 kleiner gestaltet als die Breite, die einem elektrischen Winkel von 180° entspricht, und die Rotorspulen 42n und 42s sind in verkürzten Wickelschritten um die entsprechenden Zähne 19 gewickelt, wodurch es möglich ist, induzierte elektromotorische Kräfte aufgrund von räumlichen Harmonischen, die in den Rotorspulen 42n und 42s erzeugt werden, wirksam zu verstärken. Infolgedessen kann das Drehmoment, das auf den Rotor 14 wirkt, wirksam erhöht werden.
-
Wie in 3B dargestellt ist, ist ferner die Amplitude von verketteten Magnetflüssen aufgrund von räumlichen Harmonischen am größten, wenn die Spulenbreite θ 90° ist. Um die Amplitude von Magnetflüssen aufgrund von räumlichen Harmonischen, die mit den Rotorspulen 42n und 42s verkettet sind, weiter zu vergrößern, ist somit die Breite θ von jeder von den Rotorspulen 42n und 42s in der Umfangsrichtung gleich (oder im Wesentlichen gleich) der Breite, die einem elektrischen Winkel von 90° des Rotors 14 entspricht. Wenn die Zahl der Polpaare des Rotors 14p ist und der Abstand von der mittleren Drehachse des Rotors 14 zu jeder der Rotorspulen 42n und 42sr ist, erfüllt die Breite θ von jeder der Rotorspulen 42n und 42s in der Umfangsrichtung vorzugsweise den folgenden mathematischen Ausdruck (2) (oder erfüllt ihn annähernd): θ = π × r/(2 × p) (2)
-
Dadurch können induzierte elektromotorische Kräfte aufgrund von räumlichen Harmonischen, die in den Rotorspulen 42n und 42s erzeugt werden, maximiert werden, und Magnetflüsse, die wegen der induzierten Ströme in den jeweiligen Zähnen 19 erzeugt werden, können äußerst wirksam verstärkt werden. Infolgedessen ist es möglich, das Drehmoment, das auf den Rotor 14 wirkt, noch wirksamer zu erhöhen. Das heißt, wenn die Breite θ die Breite, die 90° entspricht, deutlich übertrifft, tendieren magnetomotorische Kräfte in den Richtungen, die einander auslöschen, zu einer Verkettung mit den Rotorspulen 42n und 42s; jedoch nimmt die Wahrscheinlichkeit dafür, das solche elektromotorischen Kräfte auftreten, ab, wenn die Breite θ kleiner wird als die Breite, die 90° entspricht. Wenn die Breite θ jedoch deutlich kleiner wird als die Breite, die 90° entspricht, nehmen die elektromotorischen Kräfte, die mit den Rotorspulen 42n und 42s verkettet sind, deutlich ab. Daher wird die Breite θ auf die Breite eingestellt, die etwa 90° entspricht, wodurch es möglich ist, diese Nachteile zu vermeiden. Daher ist die Breite θ von jeder der Rotorspulen 42n und 42s in der Umfangsrichtung der Breite, die einem elektrischen Winkel von 90° entspricht, vorzugsweise im Wesentlichen gleich.
-
Wenn die Breite θ von jeder von den Rotorspulen 42n und 42s in der Umfangsrichtung des Rotors 14 der Breite, die einem elektrischen Winkel von 90° entspricht, im Wesentlichen gleich ist, können auf diese Weise in der vorliegenden Ausführungsform induzierte elektromotorische Kräfte aufgrund von räumlichen Harmonischen der drehenden Magnetfelder, die in den Rotorspulen 42n und 42s erzeugt werden, verstärkt werden, wodurch es möglich ist, die Magnetflüsse der Zähne 19, bei denen es sich um Magnetpolabschnitte handelt, äußerst wirksam zu verstärken. Die Magnetflüsse der Zähne 19 werden durch Induktionsströme erzeugt, die durch die Rotorspulen 42n und 42s fließen. Infolgedessen kann das Drehmoment, das auf den Rotor 14 wirkt, noch wirksamer erhöht werden. Man beachte, dass in der vorliegenden Ausführungsform der Rotor 14 so aufgebaut ist, dass in der Umfangsrichtung jeweils benachbarte Rotorspulen 42n und 42s elektrisch voneinander isoliert sind, die Rotorspulen 42n, die bezogen auf die Umfangsrichtung abwechselnd angeordnet sind, miteinander elektrisch in Reihe verbunden sind und die Rotorspulen 42s, die bezogen auf die Umfangsrichtung abwechselnd angeordnet sind, miteinander elektrisch in Reihe verbunden sind. In der vorliegenden Ausführungsform ist es jedoch auch möglich, dass die rotierende elektrische Maschine wie im Falle des Aufbaus, der in 23 bis 25 gezeigt ist, den Rotor 14 aufweist, in dem jede von den Dioden 21n und 21s mit jeder von den Rotorspulen 42n und 42s, die um den entsprechenden Zahn 19 gewickelt sind, verbunden ist und die Rotorspulen 42n und 42s elektrisch gegeneinander isoliert sind, und dass der Controller 38 die Abwärtsimpuls-Überlagerungseinheit 72 aufweist (4).
-
Weiter ist 11 eine Ansicht, die eine andere Ausführungsform der Erfindung zeigt und die 3A entspricht. Außerdem ist 12 eine Ansicht, die eine Ersatzschaltung von Rotorspulen und Hilfsrotorspulen in der Ausführungsform von 11 zeigt. In der rotierenden elektrischen Maschine gemäß der Ausführungsform, die in 11 dargestellt ist, sind die Zähne 19 des Rotors 14 anders als in der in 1 bis 8 dargestellten Ausführungsform, nicht nur mit den Rotorspulen 42n und 42s versehen, die um die distalen Endseiten gewickelt sind, sondern auch mit Hilfsrotorspulen 92n und 92s, die um die proximalen Endseiten gewickelt sind. Das heißt, in der vorliegenden Ausführungsform weist der Rotorkern 16 die Zähne 19 auf, wie im Falle der in 1 bis 8 dargestellten Ausführungsform. Die Zähne 19 sind bezogen auf die Umfangsrichtung des Rotors 14 mit Abständen zueinander angeordnet. Die Zähne 19 sind eine Mehrzahl von Magnetpolabschnitten und ausgeprägten bzw. Schenkelabschnitten, die zum Stator 12 hin vorstehen (siehe 2). Außerdem werden die Zähne 19 magnetisiert, wenn Ströme, die von den Dioden 21n und 21s gleichgerichtet werden, durch die Rotorspulen 42n und 42s und die Hilfsrotorspulen 92n und 92s fließen, um dadurch als Magnete zu fungieren, die feste Magnetpole aufweisen. Außerdem sind die Hilfsrotorspulen 92n und 92s um die proximalen Endseiten der entsprechenden Zähne 19 gewickelt und sind jeweils um in der Umfangsrichtung des Rotors 14 jeweils benachbarte Zähne 19 gewickelt. Irgendwelche zwei von den Hilfsrotorspulen 92n und 92s sind miteinander in Reihe verbunden, um einen Hilfsspulensatz 94 zu bilden.
-
Außerdem sind jeweils die einen Enden von irgendwelchen zwei benachbarten von den Rotorspulen 42n und 42s, die bezogen auf die Umfangsrichtung des Rotors 14 um irgendwelche benachbarte Zähne 19 gewickelt sind, an einem Verbindungspunkt R (12) über die jeweiligen entsprechenden Dioden 21n und 21s so miteinander verbunden, dass die jeweiligen entsprechenden Dioden 21n und 21s einander aus entgegengesetzten Richtungen zugewandt sind. Außerdem sind die anderen Enden der bezogen auf die Umfangsrichtung des Rotors 14 irgendwelchen zwei benachbarten Rotorspulen 42n und 42s jeweils mit einem Ende des Hilfsspulensatzes 94 verbunden, und der Verbindungspunkt R ist mit dem anderen Ende des Hilfsspulensatzes 94 verbunden.
-
Mit einem solchen Aufbau fließen jeweils gleichgerichtete Ströme durch die Rotorspulen 42n und 42s und die Hilfsrotorspulen 92n und 92s, um die Zähne 19 zu magnetisieren und zu bewirken, dass die Zähne 19 als Magnetpolabschnitte fungieren. Das heißt, dadurch, dass Wechselströme durch die Statorspulen 28u, 28v und 28w geschickt werden, wirken Magnetfelder, die räumliche Harmonische aufweisen, vom Stator 12 (2) auf den Rotor 14. Aufgrund von Schwankungen der Magnetflüsse mit räumlichen Harmonischen kommt es zu Schwankungen von magnetischen Leckflüssen, die in den Raum zwischen den Zähnen 19 des Rotors 14 austreten, und dadurch werden induzierte elektromotorische Kräfte erzeugt. Außerdem kann die Funktion der Erzeugung von Induktionsströmen größtenteils den Rotorspulen 42n und 42s an den distalen Endseiten der Zähne 19 übertragen werden, und die Funktion der Magnetisierung der Zähne 19 kann größtenteils den Hilfsrotorspulen 92n und 92s übertragen werden. Außerdem werden die Ströme, die insgesamt durch die Rotorspulen 42n und 42s fließen, welche um jeweils benachbarte Zähne 19 gewickelt sind, zu Strom, der durch die Hilfsrotorspulen 92n und 92s fließt. Außerdem sind jeweils benachbarte Hilfsrotorspulen 92n und 92s in Reihe miteinander verbunden, so dass die gleiche vorteilhafte Wirkung erzielt werden kann als wenn die Zahl der Windungen beider benachbarter Hilfsrotorspulen 92n und 92s erhöht würde, und es möglich ist, Ströme, die durch die Rotorspulen 42n und 42s und die Hilfsrotorspulen 92n und 92s fließen, zu verkleinern, während die Magnetflüsse, die durch die Zähne 19 verlaufen, unverändert bleiben. Der übrige Aufbau und die übrige Betriebsweise sind denen der in 1 bis 8 gezeigten Ausführungsform ähnlich.
-
Weiter ist 13 eine schematische Querschnitts-Teilansicht, die einen Abschnitt in einer anderen Ausführungsform der Erfindung zeigt, in der ein Stator einem Rotor zugewandt ist. Eine rotierende elektrische Maschine 10 gemäß der vorliegenden Ausführungsform unterscheidet sich von der in 1 bis 8 dargestellten Ausführungsform oder der Ausführungsform, die in 11 und 12 dargestellt ist, dahingehend, dass ein Hilfspol 96, der aus magnetischem Material gebildet ist, zwischen in der Umfangsrichtung des Rotors 14 jeweils benachbarten Zähnen 19 vorgesehen ist. Außerdem ist jeder Hilfspol 96 mit dem distalen Endabschnitt eines Säulenabschnitts 98 verbunden, der aus nicht-magnetischem Material besteht. Der proximale Abschnitt jedes Säulenabschnitts 98 ist mit dem Boden einer Nut 100 zwischen in der Umfangsrichtung jeweils benachbarten Zähnen an der Außenfläche des Rotorkerns 16, bezogen auf die Umfangsrichtung mittig verbunden. Man beachte, dass unter der Bedingung, dass jeder Säulenabschnitt 98 aus einem magnetischen Material gebildet ist und die Festigkeit des Säulenabschnitts 98 sichergestellt werden kann, die Querschnittsfläche des Säulenabschnitts 98 in der Umfangsrichtung des Rotors 14 ausreichend verkleinert werden kann.
-
Mit dem oben beschriebenen Aufbau können Magnetpfade, durch die räumliche Harmonische verlaufen können, problemlos an einem Abschnitt ausgebildet werden, der die Hilfspole 96 einschließt, so dass bewirkt wird, dass eine große Menge an räumlichen Harmonischen, die in den vom Stator 12 erzeugten drehenden Magnetfeldern enthalten sind, durch die Hilfspole 96 verlaufen, wodurch es möglich ist, Schwankungen in Magnetflüssen von räumlichen Harmonischen zu verstärken. Daher werden Induktionsströme, die in den Rotorspulen 42n und 42s auftreten, weiter verstärkt, wodurch es möglich ist, das Drehmoment der rotierenden elektrischen Maschine 10 weiter zu erhöhen. Der übrige Aufbau und die Betriebsweise sind denen der ersten Ausführungsform, die in 1 bis 8 dargestellt ist, ähnlich.
-
Nun werden weitere Gestaltungsbeispiele einer rotierenden elektrischen Maschine, welche das Antriebssystem einer rotierenden elektrischen Maschine gemäß den oben beschriebenen Ausführungsformen darstellen, beschrieben. Wie nachstehend beschrieben ist, kann der Aspekt der Erfindung auf verschiedene Gestaltungsbeispiele der rotierenden elektrischen Maschine angewendet werden.
-
Zum Beispiel sind in den oben beschriebenen Ausführungsformen die Rotorspulen 42n und 42s um die entsprechenden Zähne 19 gewickelt, bei denen es sich um Schenkelpole handelt, die in der radialen Richtung des Rotors 14 vorstehen; statt dessen ist es auch möglich, dass, wie in 14 dargestellt ist, Schlitze (Luftspalten) 48, bei denen es sich um Rotornuten handelt, im Rotorkern 16 ausgebildet sind, wodurch der magnetische Widerstand des Rotors 14 gemäß der Drehrichtung geändert wird. Wie in 14 dargestellt ist, sind im Rotorkern 16, wo jeder Magnetpfad der Umfangsrichtungsmitte eines Abschnitts, der so ausgebildet ist, dass eine Mehrzahl von Schlitzen 48 in der radialen Richtung angeordnet sind, ein q-Achsenmagnetpfadabschnitt 50 ist und jeder Magnetpfad in der Richtung entlang des Magnetpolabschnitts, an dem die Rotorspule angeordnet ist, ein d-Achsenmagnetpolabschnitt 52 ist, die Schlitze 48 so ausgebildet, dass der q-Achsenmagnetpolabschnitt 50 und der d-Achsenmagnetpolabschnitt 52, die dem Stator 12 (den Zähnen 30) zugewandt sind, in Umfangsrichtung abwechselnd angeordnet sind, und jeder q-Achsenmagnetpfadabschnitt 50 zwischen in der Umfangsrichtung jeweils benachbarten d-Achsenmagnetpfadabschnitten 52 angeordnet ist.
-
Jede von den Rotorspulen 42n und 42s ist durch die Schlitze 48 und einen entsprechenden einen von den d-Achsenmagnetpolabschnitten 52 mit einem geringen magnetischen Widerstand gewickelt. In diesem Fall sind die Schlitze 48 im Rotorkern 16 bezogen auf die Umfangsrichtung mit Abständen zueinander um die Drehachse des Rotors 14 angeordnet, und die Rotorspulen 42n und 42s sind an mehreren Umfangsrichtungsabschnitten am Außenrandabschnitt des Rotorkerns 16 gewickelt, so dass sie teilweise in den Schlitzen 48 angeordnet sind. In dem Gestaltungsbeispiel, das in 14 dargestellt ist, sind die drehenden Magnetfelder, die räumliche harmonische Komponenten aufweisen und die im Stator 12 ausgebildet sind, mit den Rotorspulen 42n und 42s verkettet, wodurch bewirkt wird, dass Gleichströme, die von den Dioden 21n und 21s gleichgerichtet werden, durch die Rotorspulen 42n und 42s fließen, wodurch die d-Achsenmagnetpfadabschnitte 52 magnetisiert werden. Infolgedessen fungieren die d-Achsenmagnetpfadabschnitte 52 als Magnete (Magnetpolabschnitte) mit festen Magnetpolen. Dabei ist die Breite jedes d-Achsenmagnetpolabschnitts 52 (die Breite θ von jeder von den Rotorspulen 42n und 42s) in der Umfangsrichtung so eingestellt, dass sie kleiner ist als die Breite, die einem elektrischen Winkel des Rotors 14 von 180° entspricht, und die Rotorspulen 42n und 42s sind mit verkürzten Wickelschritten um die entsprechenden d-Achsenmagnetpfadabschnitte 52 gewickelt. Dadurch können induzierte elektromotorische Kräfte aufgrund von räumlichen Harmonischen, die in den Rotorspulen 42n und 42s erzeugt werden, wirksam verstärkt werden. Um die induzierten elektromotorischen Kräfte aufgrund von räumlichen Harmonischen zu maximieren, ist ferner die Umfangsrichtungsbreite θ von jeder von den Rotorspulen 42n und 42s der Breite, die einem elektrischen Winkel des Rotors 14 von 90° entspricht, vorzugsweise gleich (oder fast gleich). Die übrige Gestaltung und der Betrieb sind denen der oben beschriebenen Ausführungsformen ähnlich.
-
In den oben beschriebenen Ausführungsformen, wie beispielsweise in 15 dargestellt, ist es außerdem möglich, dass der Rotor 16 einen Rotorkörper 17, der aus einem magnetischen Material gefertigt ist, und eine Mehrzahl von Dauermagneten 54 aufweist, und dass die Dauermagnete 54 am Rotorkern 16 angeordnet sind. In dem in 15 dargestellten Ausführungsbeispiel ist eine Mehrzahl von Magnetpolabschnitten 56, die als Magnete mit festen Magnetpolen fungieren, bezogen auf die Umfangsrichtung in Abständen zueinander so angeordnet, dass sie dem Statorkern 12 zugewandt sind (siehe 2), und die Rotorspulen 42n und 42s sind um die entsprechenden Magnetpolabschnitte 56 gewickelt. In diesem Fall sind Schlitze 102, bei denen es sich um Rotornuten handelt, an mehreren Umfangsrichtungsabschnitten des Rotorkerns 16 angeordnet, und die Rotorspulen 42n und 42s sind an mehreren Umfangsrichtungsabschnitten am Außenumfangsabschnitt des Rotorkerns 16 so gewickelt, dass sie teilweise in den Schlitzen 102 angeordnet sind. Jeder von den Dauermagneten 54 ist so, dass er dem Stator 12 (den Zähnen 30) zugewandt ist, zwischen bezogen auf die Umfangsrichtung jeweils benachbarten Magnetpolabschnitten 56 angeordnet. Die Dauermagnete 54 können hierbei in den Rotorkern 16 eingebettet sein oder können an der Oberfläche (der äußeren Randfläche) des Rotorkerns 16 frei liegen. Außerdem können die Dauermagnete 54 innerhalb des Rotorkerns in V-Form angeordnet sein. In dem Gestaltungsbeispiel, das in 13 dargestellt ist, sind die im Stator 12 gebildeten drehenden Magnetfelder, die räumliche harmonische Komponenten enthalten, mit den Rotorspulen 42n und 42s verkettet, wodurch bewirkt wird, dass Gleichströme, die von den Dioden 21n und 21s gleichgerichtet werden, durch die Rotorspulen 42n und 42 fließen, um dadurch die Magnetpolabschnitte 56 zu magnetisieren. Infolgedessen dienen die Magnetpolabschnitte 42n und 42s dazu, die Magnetpolabschnitte 56 zu magnetisieren. Dabei ist die Umfangsrichtungsbreite jedes einzelnen von den Magnetpolabschnitten 56 (die Breite θ von jeder von den Rotorspulen 42n und 42s) so eingestellt, dass sie kleiner ist als die Breite, die einem elektrischen Winkel des Rotors 14 von 180° entspricht, und die Rotorspulen 42n und 42s sind mit verkürzten Wickelschritten um die entsprechenden Magnetpolabschnitte 56 gewickelt, wodurch es möglich ist, die induzierten elektromotorischen Kräfte aufgrund von räumlichen Harmonischen, die in den Rotorspulen 42n und 42s erzeugt werden, wirksam zu verstärken. Um die induzierten elektromotorischen Kräfte aufgrund von räumlichen Harmonischen zu maximieren, ist ferner die Umfangsrichtungsbreite θ von jeder von den Rotorspulen 42n und 42s der Breite, die einem elektrischen Winkel des Rotors 14 von 90° entspricht, vorzugsweise gleich (oder fast gleich). Die übrige Gestaltung und der Betrieb sind denen der oben beschriebenen Ausführungsformen ähnlich.
-
Außerdem können die Rotorspulen 42n und 42s in den oben beschriebenen Ausführungsformen, wie beispielsweise in 16 dargestellt ist, in Ringform gewickelt sein. In dem Gestaltungsbeispiel, das in 16 dargestellt ist, weist der Rotorkern 16 einen ringförmigen Kernabschnitt 58 auf, und jeder von den Zähnen 19 ragt vom ringförmigen Kernabschnitt 58 in der radialen Richtung nach außen (zum Stator 12) vor. Die Rotorspulen 42n und 42s sind an Stellen des ringförmigen Kernabschnitts 58 in der Nähe der Zähne 19 in Ringform gewickelt. Außerdem sind die Rotorspulen 42n und 42s an mehreren Umfangsrichtungsabschnitten des Rotorkerns 16 so gewickelt, dass sie teilweise in den Nuten 20 angeordnet sind. In dem Gestaltungsbeispiel, das in 16 dargestellt ist, sind die räumliche harmonische Komponenten enthaltenden drehenden Magnetfelder, die im Stator 12 ausgebildet werden, ebenfalls mit den Rotorspulen 42n und 42s verkettet, wodurch bewirkt wird, dass Gleichströme, die von den Dioden 21n und 21s gleichgerichtet werden, durch die Rotorspulen 42n und 42s fließen, wodurch die Zähne 19 magnetisiert werden. Infolgedessen fungieren die Zähne 19, die nahe an den Rotorspulen 42n angeordnet sind, als Nordpole, und die Zähne 19, die nahe an den Rotorspulen 42s angeordnet sind, fungieren als Südpole. Dabei ist die Umfangsrichtungsbreite θ von jedem der Zähne 19 so eingerichtet, dass sie kleiner ist als die Breite, die einem elektrischen Winkel des Rotors 14 von 180° entspricht, wodurch es möglich ist, induzierte elektromotorische Kräfte aufgrund von räumlichen Harmonischen, die in den Rotorspulen 42n und 42s erzeugt werden, wirksam zu verstärken. Um induzierte elektromotorische Kräfte aufgrund von räumlichen Harmonischen, die in den Rotorspulen 42n und 42s erzeugt werden, zu maximieren, ist ferner die Umfangsrichtungsbreite θ von jedem der Zähne 19 vorzugsweise der Breite, die einem elektrischen Winkel des Rotors 14 von 90° entspricht, gleich (oder im Wesentlichen gleich). Man beachte, dass 16 ein Beispiel zeigt, in dem bezogen auf die Umfangsrichtung benachbarte Rotorspulen 42n und 42s jeweils elektrisch gegeneinander isoliert sind, die Rotorspulen 42n, die bezogen auf die Umfangsrichtung abwechselnd angeordnet sind, miteinander elektrisch in Reihe verbunden sind und die Rotorspulen 42s, die bezogen auf die Umfangsrichtung abwechselnd angeordnet sind, miteinander elektrisch in Reihe verbunden sind, wie im Falle des in 2 dargestellten Ausführungsbeispiels. 2. Jedoch können auch in dem Beispiel, in dem die Rotorspulen 42n und 42s in Ringform gewickelt sind, wie im Falle des in 23 bis 25 dargestellten Gestaltungsbeispiels, die Rotorspulen 42n und 42s, die um die entsprechenden Zähne 19 gewickelt sind, jeweils elektrisch gegeneinander isoliert sein. Die übrige Gestaltung und der Betrieb sind denen der oben beschriebenen Ausführungsformen ähnlich.
-
Wie im folgenden Gestaltungsbeispiel beschrieben ist, ist es außerdem möglich, dass die Rotorspulen der rotierenden elektrischen Maschine an den gleichen Stellen wie die Magnete des Rotors, an den gleichen Stellen wie die Nuten, von denen jede zwischen jeweils benachbarten Zähnen ausgebildet ist, oder an den gleichen Stellen wie die Abschnitte, die aufgrund der Mehrzahl von Schlitzen Eigenschaften magnetische Schenkelpole aufweisen, angeordnet sind. 17 ist eine schematische Ansicht einer rotierenden elektrischen Maschine, betrachtet in paralleler Richtung zur Drehachse. 18 ist eine schematische Ansicht, die den schematischen Aufbau des Rotors von 17 zeigt, betrachtet in paralleler Richtung zur Drehachse.
-
Die rotierende elektrische Maschine 10 gemäß dem vorliegenden Gestaltungsbeispiel weist einen Stator 12 und einen Rotor 14 auf. Der Stator 12 ist an einem (nicht dargestellten) Gehäuse festgelegt. Der Rotor 14 ist bezogen auf die radiale Richtung weiter innen als der Stator 12 so angeordnet, dass er dem Stator 12 mit einer vorgegebenen Lücke zugewandt ist, und ist in Bezug auf den Stator 12 drehbar. Man beachte, dass der Aufbau und die Betriebsweise des Stators 12 denen der in 1 bis 8 dargestellten Ausführungsformen ähnlich sind.
-
Wie in 18 dargestellt ist, weist der Rotor 14 einen Rotorkern 16 und Rotorspulen 42n und 42s auf. Die Rotorspulen 42n und 42s sind an mehreren Umfangsrichtungsabschnitten des Rotorkerns 16 angeordnet und gewickelt. Der Rotorkern 16 weist einen Rotorkernkörper 17, der aus einem magnetischen Material gebildet ist, und Dauermagnete 54 auf, die an mehreren Umfangsrichtungsabschnitten des Rotors 14 angeordnet sind. Der Rotor 14 ist an der Drehwelle 22 festgelegt. Magnetpolabschnitte 60, beispielsweise Säulenabschnitte, die sich in der radialen Richtung erstrecken, sind an mehreren Umfangsrichtungsabschnitten des Rotorkerns 16 ausgebildet, und die Rotorspulen 42n und 42s sind um die entsprechenden Magnetpolabschnitte 60 gewickelt. Das heißt, Schlitze 102, bei denen es sich um Rotornuten handelt, sind an mehreren Umfangsrichtungsabschnitten des Rotorkerns 16 ausgebildet, und die Rotorspulen 42n und 42s sind an mehreren Umfangsrichtungsabschnitten des Außenrandabschnitts des Rotorkerns 16 so gewickelt, dass sie teilweise in den Schlitzen 102 angeordnet sind.
-
Die Dauermagnete 54 sind an mehreren Umfangsrichtungsabschnitten des Rotors 14 in den Magnetpolabschnitten 60, die den Rotorspulen 42n und 42s in der Umfangsrichtung des Rotors 14 entsprechen, angeordnet, das heißt eingebettet. Umgekehrt sind die Rotorspulen 42n und 42s um die jeweiligen Dauermagnete 54 gewickelt. Die Dauermagnete 54 sind in der radialen Richtung des Rotors 14 magnetisiert, und die Magnetisierungsrichtungen wechseln zwischen bezogen auf die Umfangsrichtung des Rotors 14 jeweils benachbarten Magneten 54 ab. In 17 und 18 (das gleiche gilt auch für die nachstehend beschriebene 19) zeigen die durchgezogenen Pfeile auf den Dauermagneten 54 die Magnetisierungsrichtungen der Dauermagnete 54 an. Man beachte, dass die Magnetpolabschnitte 60 aus Schenkelpolen oder dergleichen bestehen können, die so angeordnet sind, dass sie sich an mehreren Umfangsrichtungsabschnitten in der radialen Richtung des Rotors 14 erstrecken.
-
Der Rotor 14 weist in der Umfangsrichtung unterschiedliche Eigenschaften magnetischer Schenkelpole auf. Wo der Magnetpfad der auf den Umfang bezogenen Mitte zwischen zwei bezogen auf die Umfangsrichtung jeweils benachbarten Magnetpolabschnitten 60, der so angeordnet ist, dass er in der Umfangsrichtung von den Dauermagneten 54 abweicht und außerdem auch von den Magnetpolabschnitten 60 im Rotor 14 abweicht, als q-Achsenmagnetpfad bezeichnet wird, und der Magnetpfad, der in der Umfangsrichtung mit der Wicklungsmittelachse von jeder von den Rotorspulen 42n und 42s zusammenfällt, als d-Achsenmagnetpfad bezeichnet wird, sind die Dauermagnete 54 jeweils in den d-Achsenmagnetpfaden angeordnet, die an mehreren Umfangsrichtungsabschnitten des Rotors 14 angeordnet sind.
-
Außerdem sind die Rotorspulen 42n und 42s, die um die entsprechenden Magnetpolabschnitte 60 gewickelt sind, elektrisch nicht miteinander verbunden, sondern gegeneinander isoliert. Weiter ist jede von den Dioden 21n und 21s, bei denen es sich um Gleichrichterelemente handelt, parallel mit jeder von den elektrisch isolierten Rotorspulen 42n und 42s verbunden. Außerdem sind die Richtung, in der Strom durch die einzelnen Dioden 21n fließt, die mit den in Umfangsrichtung des Rotors 14 abwechselnd angeordneten Rotorspulen 42n verbunden sind, und die Richtung des Stromes, der durch jede von den Dioden 21s fließt, die mit den übrigen Rotorspulen 42s verbunden sind, umgekehrt, so dass die Vorwärtsrichtungen der Dioden 21n und 21s in entgegengesetzte Richtungen weisen. Daher ist jede von den Rotorspulen 42n und 42s über die Diode 22n oder 21s kurzgeschlossen. Somit werden Ströme, die durch die Rotorspulen 42n und 42s fließen, in einer Richtung gleichgerichtet. Auch im Falle des vorliegenden Gestaltungsbeispiels bewirken die Dioden 21n und 21s eine Gleichrichtung von Strömen, die wegen der erzeugten elektromotorischen Kräfte durch die Rotorspulen 42n und 42s fließen, wodurch die Phasen von Strömen, die durch bezogen auf die Umfangsrichtung des Rotors 14 jeweils benachbarte Rotorspulen 42n und 42s fließen, zwischen der A-Phase und der B-Phase abwechseln.
-
Wenn Gleichströme gemäß der Gleichrichtungsrichtungen der Dioden 21n und 21s durch die Rotorspulen 42n und 42s fließen, werden die Magnetpolabschnitte 60, um die die Rotorspulen 42n und 42s gewickelt sind, magnetisiert, wodurch bewirkt wird, dass die Magnetpolabschnitte 60 als Magnete mit festen Magnetpolen fungieren. Die Richtungen der gestrichelten Pfeile, die an den bezogen auf die radiale Richtung äußeren Seiten der Rotorspulen 42n und 42s in 17 und 18 dargestellt sind, zeigen die Magnetisierungsrichtungen der Magnetpolabschnitte 60 an.
-
Wie in 18 dargestellt ist, sind außerdem die Richtungen der Gleichströme zwischen bezogen auf die Umfangsrichtung des Rotors 14 jeweils benachbarten Rotorspulen 42n und 42s einander entgegengesetzt. Weiter sind die Magnetisierungsrichtungen zwischen bezogen auf die Umfangsrichtung des Rotors 14 jeweils benachbarten Magnetpolabschnitten 60 entgegengesetzt zueinander. Das heißt, im vorliegenden Gestaltungsbeispiel wechseln sich die magnetischen Eigenschaften der Magnetpolabschnitte 60 in Umfangsrichtung des Rotors 14 ab. Zum Beispiel sind in 17 und 18 die Nordpole auf den radial äußeren Seiten von Abschnitten angeordnet, die in der Umfangsrichtung des Rotors 14 mit den Rotorspulen 42n zusammenfallen, bei denen es sich um die in der Umfangsrichtung des Rotors 14 abwechselnd angeordneten Magnetpolabschnitte 60 handelt, und Südpole sind auf den radial äußeren Seiten von Abschnitten angeordnet, die in der Umfangsrichtung des Rotors 14 mit den Rotorspulen 42s zusammenfallen, bei denen es sich um den Magnetpolabschnitt 60 handelt, der in der Umfangsrichtung an die Nordpol-Magnetpolabschnitte 60 angrenzt. Weiter bilden jeweils zwei in der Umfangsrichtung des Rotors 14 benachbarte Magnetpolabschnitte 60 (Nordpol und Südpol) ein Polpaar. Außerdem werden die Magnetisierungsrichtungen der Magnetpolabschnitte 54 mit den Magnetisierungsrichtungen der Magnetpolabschnitte 60, die in der Umfangsrichtung des Rotors 14 mit den Dauermagneten 54 zusammenfallen, in Übereinstimmung gebracht.
-
Außerdem sind in dem in 15 und 16 dargestellten Beispiel die acht Magnetpolabschnitte 60 ausgebildet, und die Anzahl der Polpaare des Rotors 14 ist vier. Außerdem sind die Anzahl von Polpaaren des Stators 12 (15) und die Anzahl von Polpaaren des Rotors 14 jeweils vier, und die Anzahl von Polpaaren des Stators 12 ist der Anzahl von Polpaaren des Rotors 14 gleich. Jedoch muss die Anzahl von Polpaaren des Stators 12 und die Anzahl von Polpaaren des Rotors 14 nicht jeweils vier sein.
-
Außerdem ist in dem vorliegenden Gestaltungsbeispiel die Breite von jedem von den Magnetpolabschnitten 60 in der Umfangsrichtung des Rotors 14 so eingestellt, dass sie kleiner ist als die Breite, die einem elektrischen Winkel des Rotors 14 von 180° entspricht. Weiter ist die Umfangsrichtungsbreite θ (16) von jeder von den Rotorspulen 42n und 42s so eingestellt, dass sie kleiner ist als die Breite, die einem elektrischen Winkel des Rotors 14 von 180° entspricht, und die Rotorspulen 42n und 42s sind in verkürzten Wickelschritten um die entsprechenden Magnetpolabschnitte 60 gewickelt. Außerdem ist die Breite θ von jeder von den Rotorspulen 42n und 42s in der Umfangsrichtung des Rotors 14 der Breite, die einem elektrischen Winkel von 90° entspricht, vorzugsweise gleich (oder annähernd gleich).
-
In der solchermaßen aufgebauten rotierenden elektrischen Maschine 10 verlaufen dreiphasige Wechselströme durch die dreiphasigen Statorspulen 28u, 28v und 28w, um zu bewirken, dass die drehenden Magnetfelder mit Frequenzen, die harmonische Komponenten enthaltend, die von den Zähnen 30 erzeugt werden (17), an den Rotor 14 angelegt werden. Als Reaktion darauf wirken dann ein Trägheitsmoment Tre, ein Dauermagnetmoment Tmg, das von den Dauermagneten erzeugt wird, und ein Rotorspulenmoment Tcoil, das von den Rotorspulen erzeugt wird, auf den Rotor 14, wodurch bewirkt wird, dass der Rotor 14 so angetrieben wird, dass er sich synchron mit den drehenden Magnetfeldern (fundamentalen Komponenten), die vom Stator 12 erzeugt werden, dreht. Hierbei ist das Trägheitsmoment Tre ein Drehmoment, das als Ergebnis davon erzeugt wird, dass die jeweiligen Magnetpolabschnitte 60 von den drehenden Magnetfeldern, die vom Stator 12 erzeugt werden, angezogen werden. Außerdem ist das Dauermagnetmoment Tmg ein Drehmoment, das aufgrund von Anziehungen und Abstoßungen erzeugt wird, bei denen es sich um Wechselwirkungen zwischen den Magnetfeldern, die von den Dauermagneten 54 erzeugt werden, und den drehenden Magnetfeldern, die vom Stator 12 erzeugt werden, handelt. Außerdem ist das Rotorspulenmoment Tcoil ein Drehmoment, das von Strömen bewirkt wird, die von den Rotorspulen 42n und 42s als Folge davon erzeugt werden, dass die räumlichen harmonischen Komponenten einer magnetomotorischen Kraft, die vom Stator 12 erzeugt wird, an die Rotorspulen 42n und 42s angelegt werden. Dieses Drehmoment wird durch Anziehungen und Abstoßungen erzeugt, bei denen es sich um Wechselwirkungen zwischen Magnetfeldern, die von den Magnetpolabschnitten 60 erzeugt werden, und den drehenden Magnetfeldern, die vom Stator 12 erzeugt werden, handelt.
-
Mit der oben beschriebenen drehenden elektrischen Maschine 10 gemäß dem vorliegenden Gestaltungsbeispiel ist es möglich, das Drehmoment der rotierenden elektrischen Maschine 10 wirksam zu erhöhen. Außerdem werden Schwankungen von Magnetflüssen in den Dauermagneten 54 durch Induktionsströme, die durch die Rotorspulen 42n und 42s fließen, unterdrückt, so dass Wirbelstromverluste innerhalb der jeweiligen Dauermagnete 54 unterdrückt werden, wodurch die Wärmeerzeugung der Magnete verringert werden kann.
-
Außerdem ist 19 eine schematische Ansicht, die 18 entspricht, in einem anderen Gestaltungsbeispiel. In dem vorliegenden Gestaltungsbeispiel sind die Rotorspulen 42n, die Teil der Mehrzahl von Rotorspulen 42n und 42s sind und die in der Umfangsrichtung des Rotors 14 abwechselnd angeordnet sind, elektrisch in Reihe miteinander verbunden, und die übrigen Rotorspulen 42s, die in der Umfangsrichtung abwechselnd angeordnet sind, sind elektrisch in Reihe miteinander verbunden. Das heißt, die Rotorspulen 42n oder 42s, die um die Magnetpolabschnitte 60 gewickelt sind, die als Magnete fungieren, und die in den gleichen Richtungen magnetisiert sind, sind elektrisch in Reihe miteinander verbunden. Außerdem sind die Rotorspulen 42n und 42s, die bezogen auf die Umfangsrichtung des Rotors 14 jeweils um benachbarte Magnetpolabschnitte 60 gewickelt sind, elektrisch gegeneinander isoliert. Dann bilden ein Schaltkreis, der die Rotorspulen 42n beinhaltet, die elektrisch miteinander verbunden sind, und ein Schaltkreis, der die Rotorspulen 42s beinhaltet, die elektrisch miteinander verbunden sind, ein Paar aus Rotorspulen-Schaltkreisen 62a und 62b, die elektrisch gegeneinander isoliert sind. Das heißt, die Rotorspulen 42n oder 42s, die um die Magnetpolabschnitte 60 gewickelt sind, welche untereinander die gleichen magnetischen Eigenschaften haben, sind elektrisch miteinander verbunden.
-
Außerdem sind Dioden 21n und 21s, bei denen es sich um Gleichrichterelemente handelt, die voneinander verschiedene Polaritäten aufweisen, jeweils mit den beiden Rotorspulen-Schaltkreisen 62a und 62b, bei denen es sich um die abwechselnd angeordneten Rotorspulen 42n und 42s handelt, in Reihe verbunden, und die Richtungen der Ströme, die durch die Rotorspulenschaltungen 62a und 62b fließen, werden in einer Richtung gleichgerichtet. Außerdem sind Ströme, die durch einen von den beiden Rotorspulen-Schaltkreisen 62a und 62b fließen, und Ströme, die durch den anderen von den Rotorspulen-Schaltkreisen 62a und 62b fließen, einander entgegengesetzt. Die übrige Gestaltung und Betriebsweise sind denen des in 17 und 18 dargestellten Gestaltungsbeispiels ähnlich.
-
20 ist eine schematische Ansicht, die 18 entspricht, in einem anderen Gestaltungsbeispiel. Der Rotor 14, der Bestandteil der rotierenden elektrischen Maschine gemäß dem vorliegenden Gestaltungsbeispiel ist, unterscheidet sich von dem Rotor 14 in dem Gestaltungsbeispiel, das in 19 dargestellt ist, darin, dass die Dauermagnete 54 (siehe 19), die für den Rotor 14 vorgesehen sind, fehlen. Außerdem weist der Rotorkern 16 Zähne 64 auf, die an mehreren Umfangsrichtungsabschnitten an der Außenrandfläche in der radialen Richtung vorstehen, und jede von den Rotorspulen 42n und 42s ist zwischen bezogen auf die Umfangsrichtung des Rotors 14 jeweils benachbarten Zähnen 64 angeordnet. Das heißt, die Rotorspulen 42n und 42s sind in einem hohlen Zustand angeordnet, wo das Innere hohl ist. Außerdem ragt ein Abschnitt zwischen jeweils benachbarten Rotorspulen 42n und 42s in der Umfangsrichtung des Rotors 14 zum Stator 12 hin vor (siehe 17), und der Rotorkern 16 weist magnetische Eigenschaften eines Schenkelpols auf. In diesem Fall sind die Rotorspulen 42n und 42s an mehreren Umfangsrichtungsabschnitten des Außenrandabschnitts des Rotorkerns 16 so gewickelt, dass sie zum Teil oder zur Gänze in den entsprechenden Nuten 20 angeordnet sind.
-
In dem solchermaßen aufgebauten Rotor 14 werden Magnetpfade, die mit den Zähnen 64 in der Umfangsrichtung des Rotors 14 zusammenfallen, zu q-Achsenmagnetpfaden, und Stellen, die mit den Rotorspulen 42n und 42s in der Umfangsrichtung des Rotors 14 zusammenfallen, werden d-Achsenmagnetpfade.
-
In dem oben dargestellten Gestaltungsbeispiel sind anders als in dem Gestaltungsbeispiel, das in 17 und 18 dargestellt ist, keine Dauermagnete 54 (siehe 19) im Rotor 14 angeordnet; jedoch kann das Drehmoment der rotierenden elektrischen Maschine unabhängig von der Drehrichtung des Rotors 14 erhöht werden. Das heißt, die Stromphase-Drehmoment-Kennlinie ist die gleiche, unabhängig von der Drehrichtung des Rotors 14, und der Höchstwert des Drehmoments wird größer, so dass das Drehmoment wirksam erhöht werden kann. Wenn beispielsweise ein Drehmoment im Leistungsbetrieb erhöht wird, kann das Drehmoment im Leistungsbetrieb sowohl während einer Vorwärtsdrehung als auch während einer Rückwärtsdrehung des Rotors 14 erhöht werden. Wenn ein regeneratives Drehmoment erhöht wird, kann außerdem das regenerative Drehmoment sowohl während einer Vorwärtsdrehung als auch während einer Rückwärtsdrehung des Rotors 14 erhöht werden. Somit kann eine rotierende elektrische Maschine erhalten werden, die in der Lage ist, sowohl bei der Vorwärtsdrehung als auch bei der Rückwärtsdrehung des Rotors 14 ein höheres Drehmoment zu erreichen. Der übrige Aufbau und die Betriebsweise sind denen des in 17 und 18 dargestellten Gestaltungsbeispiels oder denen des in 19 dargestellten Gestaltungsbeispiels gleich.
-
21 ist eine schematische Ansicht, die 18 entspricht, in einem anderen Gestaltungsbeispiel. Der Rotor 14, der Bestandteil einer rotierenden elektrischen Maschine gemäß dem vorliegenden Gestaltungsbeispiel ist, ist ebenfalls so aufgebaut, dass keine Dauermagnete 54 (siehe 18 und dergleichen) für den Rotor 14 vorgesehen sind, wie im Falle des Gestaltungsbeispiels, das in 20 dargestellt ist. Im vorliegenden Gestaltungsbeispiel sind Schlitze 48, bei denen es sich um Luftraumabschnitte und Rotornuten handelt, innerhalb des Rotorkerns 16 ausgebildet, der Bestandteil des Rotors 14 ist, um dadurch den magnetischen Widerstand des Rotors 14 in der Drehrichtung zu ändern. Das heißt, die in Mehrzahl vorhandenen Schlitze 48, die sich in der axialen Richtung im Wesentlichen mit einem U-förmigen Querschnitt erstrecken und die eine Form aufweisen, die zu der bezogen auf die radiale Richtung äußeren Seite hin offen ist, sind an mehreren Umfangsrichtungsabschnitten des Rotorkerns 16 so angeordnet, dass sie in der radialen Richtung des Rotors 14 voneinander beabstandet sind. Weiter sind Rotorspulen 42n und 42s an mehreren Umfangsrichtungsabschnitten des Rotorkerns 16 so angeordnet, dass sie mit den Umfangsrichtungsmitten der in Mehrzahl vorhandenen Schlitze 48 verbunden sind, um d-Achsenmagnetpfade zu bilden, und der Magnetpfad zwischen jeweils zwei in der Umfangsrichtung benachbarten Schlitzen 48 ein q-Achsenmagnetpfad ist.
-
Außerdem sind die Rotorspulen 42n und 42s jeweils mit Dioden 21n und 21s kurzgeschlossen. Die Dioden 21n und 21s weisen unterschiedliche Polaritäten zwischen jeweils benachbarten Rotorspulen 42n und 42s auf. Die Rotorspulen 42n, die jeweils mit den Dioden 21n kurzgeschlossen sind, und die Rotorspulen 42s, die jeweils mit den Dioden 21 kurzgeschlossen sind, sind in der Umfangsrichtung des Rotors 14 abwechselnd angeordnet, und die magnetischen Eigenschaften der in Mehrzahl vorhandenen Magnetpolabschnitte 66, die von Strömen erzeugt werden, die durch die Rotorspulen 42n und 42s fließen, wechseln in Umfangsrichtung des Rotors 14 ab. In diesem Fall sind die Schlitze 48 bezogen auf die Umfangsrichtung mit Abständen zueinander um die Drehachse des Rotors 14 im Rotorkern ausgebildet, und die Rotorspulen 42n und 42s sind an mehreren Umfangsrichtungsabschnitten am Außenrandabschnitt des Rotorkerns 16 so gewickelt, dass sie teilweise in den Schlitzen 48 angeordnet sind.
-
Im Falle des oben dargestellten Gestaltungsbeispiels sind magnetische Drehfelder vom Stator 12 (siehe 17) mit den Rotorspulen 42n und 42s verkettet, um zu bewirken, dass Gleichströme, die von den Dioden 21n und 21s gleichgerichtet werden, durch die Rotorspulen 42n und 42s fließen, wodurch die Magnetpolabschnitte 66, die an mehreren Umfangsrichtungsabschnitten angeordnet sind, das heißt die d-Achsenmagnetpfade, magnetisiert werden, und die Magnetpolabschnitte 66 als Magnete fungieren, die feste Magnetpole aufweisen. Außerdem ist die Breite von jeder der Rotorspulen 42n und 42s in der Umfangsrichtung des Rotors 14 so eingerichtet, dass sie kleiner ist als die Breite, die einem elektrischen Winkel des Rotors 14 von 180° entspricht, und die Rotorspulen 42n und 42s sind in verkürzten Wickelschritten um die jeweiligen Magnetpolabschnitte 60 gewickelt. Außerdem ist die Breite von jeder von den Rotorspulen 42n und 42s in der Umfangsrichtung der Breite, die einem elektrischen Winkel des Rotors 14 von 90° entspricht, vorzugsweise gleich (oder im Wesentlichen gleich).
-
Auch im Falle des oben dargestellten Gestaltungsbeispiels sind keine Dauermagnete am Rotor 14 angeordnet; jedoch kann das Drehmoment der rotierenden elektrischen Maschine unabhängig von der Drehrichtung des Rotors 14 erhöht werden. Die übrige Gestaltung und Betriebsweise sind denen des Gestaltungsbeispiels, das in 17 und 18 dargestellt ist, ähnlich.
-
22 ist eine schematische Ansicht, die 18 entspricht, in einem anderen Gestaltungsbeispiel. Der Rotor 14, der eine rotierende elektrische Maschine gemäß dem vorliegenden Ausführungsbeispiel darstellt, unterscheidet sich von dem Rotor 14, der das in 17 und 18 dargestellte Ausführungsbeispiel darstellt, dahingehend, dass der Rotorkern 16 aus einem Rotorkernkörper 104, der aus einem magnetischen Material besteht, und einer Mehrzahl von Dauermagneten 54 gebildet ist. Außerdem weist der Rotorkernkörper 104 nicht die magnetischen Eigenschaften eines Schenkelpols auf, und die Dauermagnete 54 sind an mehreren Umfangsrichtungsabschnitten der äußeren Randfläche des Rotorkernkörpers 104 befestigt. Außerdem ist der Rotorkern 16 so ausgebildet, dass ein Schlitz 20 zwischen bezogen auf die Umfangsrichtung jeweils benachbarten Dauermagneten 54 um die Drehachse des Rotors herum mit Abständen ausgebildet ist. Außerdem sind Rotorspulen 42n und 42s um die entsprechenden Dauermagente 54 gewickelt. In diesem Fall sind die Rotorspulen 42n und 42s an mehreren Umfangsrichtungsabschnitten des Außenrandabschnitts des Rotorkerns 16 so gewickelt, dass sie zum Teil in den Schlitzen 20 angeordnet sind. Im vorliegenden Gestaltungsbeispiel sind Abschnitte, die in der Umfangsrichtung an mehreren Abschnitten des Rotors 14 mit den Dauermagneten 54 zusammenfallen, in der Umfangsrichtung als Magnetpole ausgebildet. Außerdem sind die Rotorspulen 42n und 42s jeweils von Dioden 21n und 21s kurzgeschlossen. Die Dioden 21n und 21s weisen unterschiedliche Polaritäten zwischen jeweils benachbarten Rotorspulen 42n und 42s auf. Die übrige Gestaltung und Betriebsweise sind denen des Ausführungsbeispiels, das in 17 und 18 dargestellt ist, gleich.
-
In den oben beschriebenen Ausführungsformen und Gestaltungsbeispielen ist die rotierende elektrische Maschine beschrieben, in der der Stator 12 und der Rotor 14 so angeordnet sind, dass sie einander in der radialen Richtung senkrecht zur Drehwelle 22 zugewandt sind. Jedoch kann die rotierende elektrische Maschine, die die oben beschriebenen Ausführungsformen darstellt, auch eine rotierende elektrische Maschine sein, in der der Stator 12 und der Rotor 14 so angeordnet sind, dass sie einander in der Richtung, die parallel ist zur Drehwelle 22 (der Richtung entlang der Drehachse), zugewandt sind. Außerdem ist oben der Fall beschrieben, wo der Rotor bezogen auf die radiale Richtung weiter innen angeordnet ist als der Stator, so dass er dem Stator zugewandt ist; jedoch kann der Aspekt der Erfindung auch durch die Gestaltung implementiert werden, dass der Rotor bezogen auf die radiale Richtung weiter außen angeordnet ist als der Stator, so dass er dem Stator zugewandt ist.
-
Wie oben beschrieben, weist ein Antriebssystem einer rotierenden elektrischen Maschine gemäß der vorliegenden Ausführungsform auf: eine rotierende elektrische Maschine mit einem Stator und einem Rotor, die so angeordnet sind, dass sie einander zugewandt sind; und eine Steuereinheit, die die Antriebseinheit steuert. Der Stator weist auf: einen Statorkern mit Statornuten, die an mehreren Umfangsrichtungsabschnitten ausgebildet sind, und mehrphasige Spulen, die durch die Statornuten als konzentrierte Wicklung um den Statorkern gewickelt sind. Der Rotor weist einen Rotorkern, Rotorspulen, die an mehreren Umfangsrichtungsabschnitten des Rotorkerns gewickelt sind, und eine Gleichrichtereinheit auf, die mit den Rotorspulen verbunden ist und magnetische Eigenschaften der jeweiligen Rotorspulen bezogen auf die Umfangsrichtung unter den in Mehrzahl vorhandenen Rotorspulen abwechselt. Der Rotor ändert magnetische Eigenschaften von Magnetpolabschnitten an mehreren Umfangsrichtungsabschnitten abwechselnd in der Umfangsrichtung. Die magnetischen Eigenschaften werden von Strömen erzeugt, die durch die jeweiligen Rotorspulen fließen. Die Steuereinheit weist eine Abwärts-/Aufwärtsimpuls-Überlagerungseinheit auf, die Abwärtsimpulsstrom für eine impulsförmige Abwärtswandlung über einen q-Achsenstrombefehl zum Durchlassen von Strömen durch die Statorspulen legt, um magnetische Feldflüsse in Richtungen zu erzeugen, die um einen elektrischen Winkel von 90 Grad in Bezug auf die Magnetpolrichtungen verfrüht sind, bei denen es sich um Wicklungsmittelachsenrichtungen der jeweiligen Statorspulen handelt, und Aufwärtsimpulsströme für eine impulsförmige Aufwärtswandlung über einen d-Achsenstrombefehl zum Durchlassen von Strömen durch die Statorspulen legt, um magnetische Feldflüsse in Richtung der Magnetpole zu erzeugen. Mit diesem Aufbau ist es weiter möglich, wie oben beschrieben, die rotierende elektrische Maschine zu erhalten, die in der Lage ist, ein Drehmoment auch in einem niedrigen Drehzahlbereich zu erhöhen und gleichzeitig zu vermeiden, dass zu starke Ströme durch die Statorspulen fließen.
-
Die Ausführungsformen der Erfindung sind oben beschrieben; jedoch ist der Aspekt der Erfindung nicht auf die obigen Ausführungsformen beschränkt. Der Aspekt der Erfindung kann selbstverständlich in verschiedenen Formen implementiert werden, ohne vom Bereich der Erfindung abzuweichen.
-
ZITATE ENTHALTEN IN DER BESCHREIBUNG
-
Diese Liste der vom Anmelder aufgeführten Dokumente wurde automatisiert erzeugt und ist ausschließlich zur besseren Information des Lesers aufgenommen. Die Liste ist nicht Bestandteil der deutschen Patent- bzw. Gebrauchsmusteranmeldung. Das DPMA übernimmt keinerlei Haftung für etwaige Fehler oder Auslassungen.
-
Zitierte Patentliteratur
-
- JP 2009-112091 A [0002, 0002]
- JP 2007-185082 A [0005, 0092]
- JP 98908 A [0005]
- JP 110079 A [0005]
- JP 2010-98908 A [0093]
- JP 2010-11079 A [0093]