-
Die
vorliegende Erfindung betrifft eine Technik zum Schätzen von
Leistungen, die dazu aktiviert werden, in eine Sekundärzelle eingegeben
zu werden und dazu aktiviert sind, von der gleichen Sekundärzelle ausgegeben
zu werden.
-
Eine
Erstveröffentlichung
der
japanischen Patentanmeldung
mit der Nr. Heisei 9-171063 , die am 30. Juni 1997 veröffentlicht
wurde, veranschaulicht eine vorher vorgeschlagene Vorrichtung zum
Berechnen der Leistung einer Batterie. In der in der oben angegebenen
Erstveröffentlichung
der japanischen Patentanmeldung beschriebenen, vorher vorgeschlagenen
Vorrichtung zum Berechnen einer Batterieleistung wird eine Gleichung
(V = R × I
+ V
0), die eine lineare I-V-Kennlinie ausdrückt, die
eine Entladecharakteristik der Zelle wiedergibt, auf Basis eines
Stroms I und einer Klemmenspannung V, die von einer Zelle zugeführt wird,
berechnet, ein innerer Widerstand R der Zelle wird aus seinem Gradienten
berechnet und eine elektromotorische Kraft V
0 (die
einer Klemmenspannung während
eines Stromausfalls entspricht und auch als offene Spannung oder
Leerlaufspannung bezeichnet wird) der Zelle wird aus einem Abschnitt
berechnet. Der Wert für
eine minimale garantierte Spannung V
min zum
Garantieren der Lebensdauer der Zelle auf Basis des Stroms I und
der Zellentemperatur T wird berechnet und in die Gleichung für die lineare
I-V-Kennlinie eingesetzt, um den Wert für einen maximalen Strom I
max zu bestimmen. Der Wert für die Ausgabe-Aktivierungsleistung
P wird aus einer Gleichung für
P = V
min × I
max berechnet.
-
Sowohl
der innere Widerstand R als auch die Leerlaufspannung V besitzen
die Eigenschaft (Charakteristik), dass sich sowohl R als auch V
unverzüglich
(oder in Bezug auf die Zeit kontinuierlich) während der Lade- und Entladevorgänge entsprechend
dem Strom I ändern.
In der in der oben angegebenen Erstveröffentlichung der japanischen
Patentanmeldung offenbarten, vorher beschriebenen Vorrichtung zum
Berechnen einer Batterieleistung werden der Strom I und die Klemmenspannung
V zwischen zwei Punkten während
des Ladevorgangs entsprechend dem Strom I gemessen, um die I-V-Gerade zu berechnen.
Dabei wird angenommen, dass der innere Widerstand R und die Leerlaufspannung
V0, die aus de I-V-Gerade bestimmt werden, sich
zwischen den beiden Punkten nicht ändern. Da sich jedoch der innere
Widerstand R und die Leerlaufspannung V0 tatsächlich unverzüglich (oder
kontinuierlich) mit der Zeit ändern, wird
in dem Fall des in der oben beschriebenen Erstveröffentlichung
der japanischen Patentanmeldung offenbarten Rechenverfahrens eine Schätzgenauigkeit
für einen
Wert für
die Ausgabe-Aktivierungsleistung P verringert.
-
Die
JP 2000 030748 offenbart
ein Rechenwerk für
die Eingabe-Ausgabe von Leistung einer Batterie, in dem vorher eine
Beziehung zwischen der Leerlaufspannung und der Eingabe- und Ausgabe-Aktivierungsleistung
gemessen und in Form eines Abbilds abgespeichert wird. Die Eingabe-
und Ausgabe-Aktivierungsleistungen werden in einem Fall, bei dem
weder der Ladestrom noch der Entladestrom in die Zelle oder aus
der Zelle geleitet werden, auf Basis der Leerlaufspannung und des
abgespeicherten Abbilds bestimmt. In dem Fall, in dem die Entlade-
und Ladeströme
in die Zelle und aus der Zelle heraus geleitet werden, wird die
Leerlaufspannung auf Basis des Integrationswerts des Stroms korrigiert
und die Eingabe- und Ausgabe-Aktivierungsleistungen auf Basis der
korrigierten Leerlaufspannung und des abgespeicherten Abbilds bestimmt.
-
Die
JP 2002 006010 offenbart
eine Vorrichtung zum Abschätzen
der Eingabe- und Ausgabe-Aktivierungsleistungen, in der der Strom
und die Spannung während
der Ladung und Entladung einer vorgegebenen Probenkapazität, eine
Kennlinie zwischen dem gemessenen Strom und der Spannung, bestimmt
wird, die Leerlaufspannung aus dieser Kennlinie bestimmt wird und
die Eingabe- und Ausgabe-Aktivierungsleistungen der Zelle unter
Verwenden der Leelaufspannung geschätzt werden.
-
Die
SU 853 715 beschreibt verschiedene
Parameter für
ein dynamisches Batteriemodell.
-
Es
ist eine Aufgabe der vorliegenden Erfindung, eine Schätzvorrichtung
und ein Verfahren für
eine Sekundärzelle
bereitzustellen, die die Eingabe- und Ausgabe-Aktivierungsleistungen für die Sekundärzelle mit
einer hohen Genauigkeit abschätzen
können
und ausreichend einer tatsächlichen
Charakteristik der Sekundärzelle
entsprechen. Es wird angemerkt, dass die Ausgabe-Aktivierungleistung
als eine Leistung definiert ist, die von der Sekundärzelle ausgegeben
werden kann und die Eingabe-Aktivierungsleistung
ist als die Leistung definiert, die in die Sekundärzelle eingegeben
werden kann.
-
Gemäß einem
Aspekt der vorliegenden Erfindung für eine Vorrichtung wird die
oben genannte Aufgabe durch eine Vorrichtung, die eine Kombination
aus den Merkmalen des unabhängigen
Anspruchs 1 aufweist, gelöst.
-
Gemäß einem
Aspekt der vorliegenden Erfindung für ein Verfahren wird die oben
genannte Aufgabe durch ein Schätzverfahren,
das eine Kombination aus den Merkmalen des unabhängigen Anspruchs 19 aufweist,
gelöst.
-
Bevorzugte
Ausführungsformen
der vorliegenden Erfindung sind in den Unteransprüchen ausgeführt.
-
Im
Folgenden wird die vorliegende Erfindung mit Hilfe von Ausführungsformen
derselben in Verbindung mit den beigefügten Figuren ausführlicher
erläutert,
in denen:
-
1 ein
funktionelles Blockdiagramm einer Vorrichtung zum Abschätzen der
Eingabe- und Ausgabe-Aktivierungsleistungen
für eine
Sekundärzelle
zeigt, die sowohl in der ersten als auch der zweiten bevorzugten
Ausführungsform
angewendet werden kann;
-
2 ist
ein Blockdiagramm für
einen speziellen Schaltkreis einer Batterie-Steuereinheit und eines Systems
zum Steuern der Belastung einer Sekundärzelle, für das die Vorrichtung zum Abschätzen der
Eingabe- und Ausgabe-Aktivierungsleistungen anwendbar ist;
-
3 ist
ein Abbild, das eine Beziehung zwischen einer Leerlaufspannung und
einem Ladestrom (SOC) darstellt;
-
4 ist
eine Modellansicht, die ein Ersatzschaltungsmodell für die Sekundärzelle in
der Vorrichtung zum Abschätzen
der Eingabe- und Ausgabe-Aktivierungsleistungen der ersten bevorzugten
Ausführungsform darstellt;
-
5 ist
eine Modellansicht, die ein Ersatzschaltungsmodell für die Sekundärzelle in
der Vorrichtung zum Abschätzen
der Eingabe- und Ausgabe-Aktivierungsleistungen der zweiten bevorzugten
Ausführungsform
darstellt;
-
6 ist
ein Ablaufplan einer Verarbeitung, die einen Rechenprozess in dem
Fall der ersten bevorzugten Ausführungsform
der Vorrichtung zum Abschätzen
der Eingabe- und Ausgabe-Aktivierungsleistungen darstellt;
-
7 ist
ein Ablaufplan einer Verarbeitung, die einen Rechenprozess in dem
Fall der zweiten bevorzugten Ausführungsform der Vorrichtung
zum Abschätzen
der Eingabe- und
Ausgabe-Aktivierungsleistungen darstellt;
-
8A, 8B, 8C, 8D, 8E, 8F, 8G, 8H, 8I integral
ein Zeitbild zeigen, das ein Ergebnis einer Simulation auf Basis
der ersten Ausführungsform
der Vorrichtung zum Abschätzen der
Eingabe- und Ausgabe-Aktivierungsleistungen darstellt;
-
9A, 9B, 9C, 9D, 9E, 9F, 9G, 9H, 9I, 9J integral
ein Zeitbild zeigen, das ein Ergebnis einer Simulation auf Basis
der ersten Ausführungsform
der Vorrichtung zum Abschätzen
der Eingabe- und Ausgabe-Aktivierungsleistungen darstellt;
-
Im
Folgenden wird auf die Figuren Bezug genommen, um ein besseres Verständnis der
vorliegenden Erfindung zu ermöglichen.
-
1 zeigt
ein funktionelles Blockdiagramm für eine Vorrichtung zum Abschätzen der
Eingabe- und Ausgabe-Aktivierungsleistungen, um ein allgemeines
Konzept für
sowohl die erste als auch die zweite bevorzugte Ausführungsform,
die nachfolgend beschrieben werden, zu erläutern. In 1 bezeichnet
ein Bezugszeichen 1 einen Parameter θ(k), das einen Abschnitt abschätzt, der
integral jeden Parameter (die ausführliche Beschreibung davon
wird hierin weggelassen werden) in einem Zellenmodell abschätzt, indem
eine Leerlaufspannung Vo(k) eine Abstandsgröße ist, die die gemessene Spannung
V und den Strom I, die von einem Abschnitt 5 zum Erfassen
des Stroms I(k) und einem Abschnitt 6 zum Erfassen der
Klemmenspannung V(k) erfasst werden, verwendet. Ein Bezugszeichen 2 bezeichnet
einen Leerlaufspannungs-Berechnungsabschnitt Vo(k).
Die Leerlaufspannung Vo(k) wird auf der Basis der gemessenen Spannung
V und des Stroms I und jedem Schätz-Parameter
gemessen. Ein Bezugszeichen 3 bezeichnet einen Abschnitt
zum Schätzen
der Eingabe-Aktivierungsleistung,
der eine Leistung abschätzt,
die auf Basis des Parameters θ(k)
und der Leerlaufspannung Vo(k) in die Sekundärzelle eingegeben werden kann.
Ein Bezugszeichen 4 bezeichnet einen Abschnitt zum Abschätzen der
Ausgabe-Aktivierungsleistung,
der die Leistung abschätzt,
die auf Basis des Parameters θ(k)
und der Leerlaufspannung Vo(k) aus der Sekundärzelle ausgegeben werden kann.
Ein Bezugszeichen 5 bezeichnet einen Abschnitt zum Erfassen
des Stroms I(k), der den in eine Sekundärzelle geladenen oder aus einer
Sekundärzelle
entladenen Strom erfasst. Ein Bezugszeichen 6 bezeichnet
einen Abschnitt zum Erfassen der Klemmenspannung V(k), die eine
Klemmenspannung der Zelle erfasst.
-
2 zeigt
ein Blockdiagramm, das einen speziellen Aufbau einer Batterie-Steuereinheit
und eines Systems zum Steuern der Belastung der Sekundärzelle darstellt,
bei dem die Vorrichtung zum Abschätzen der Eingabe- und Ausgabe-Aktivierungsleistung
anwendbar ist. In diesem System ist die Vorrichtung zum Abschätzen der
Eingabe- und Ausgabe-Aktivierungsleistungen
in einem System angebracht, in dem eine Belastung, wie beispielsweise
ein Motor, angesteuert wird und eine regenerierbare Leistung des
Motors zum Laden der Sekundärzelle
verwendet wird. In 2 bezeichnet ein Bezugszeichen 10 eine
Sekundärzelle
(oder nur eine Zelle), ein Bezugszeichen 20 eine Belastung
des Motors oder Ähnliches
und ein Bezugszeichen 30 bezeichnet eine Batterie-Steuereinheit
(eine elektronische Steuereinheit), die so funktioniert, dass sie
die Eingabe- und Ausgabe-Aktivierungsleistungen einer Zelle 10 abschätzt. Die
Batterie-Steuereinheit 30 schließt einen Mikrocomputer, der
eine CPU (Zentraleinheit) einschließt, die ein Programm berechnet,
einen ROM (Festwertspeicher, Read Only Memory), der ein Programm
speichert, einen RAM (Random Access Memory), der ein Ergebnis aus
Berechnungen speichert, und elektronische Schaltkreise ein. Ein
Bezugszeichen 40 bezeichnet einen Strommesser, der einen
Strom misst (erfasst), der in eine Sekundärzelle 10 geladen
wird oder aus dieser entladen wird. Ein Bezugszeichen 50 bezeichnet
einen Spannungsmesser, um eine Klemmenspannung über die Sekundärzelle 10 zu
erfassen. Diese Messgeräte
sind mit einer Batterie-Steuereinheit 30 verbunden. Die
oben beschriebene Batterie-Steuereinheit 30 entspricht
Abschnitt 1 zum Abschätzen
des Parameters θ(k)
der 1, dem Leerlaufspannungs Vo(k)-Berechnungsabschnitt 2, dem
Abschnitt 3 zum Abschätzen
der Eingabe-Aktivierungsleistung
und dem Abschnitt 4 zum Abschätzen der Ausgabe-Aktivierungsleistung.
Daneben entspricht der Strommesser 40 dem Abschnitt 5 zum
Erfassen des Stroms I(k) und der Spannungsmesser 50 entspricht
entsprechend dem Abschnitt 6 zum Erfassen einer Klemmenspannung
V(k). Es wird angemerkt, dass ein Bezugszeichen 60, das
in 2 gezeigt ist, einen Temperatursensor zum Erfassen
einer Zellentemperatur bezeichnet und ein Bezugszeichen 70,
das in 2 gezeigt ist, eine Relaisschaltung (oder einfach
ein Relais) bezeichnet.
-
(Erste Ausführungsform)
-
Als
nächstes
wird im Folgenden ein in der ersten Ausführungsform verwendetes, so
genanntes Zellenmodell beschrieben werden.
4 zeigt
ein Ersatzschaltungsmodell für
die Sekundärzelle
in der ersten Ausführungsform.
Dieses Ersatzschaltungsmodell entspricht einem Fall, in dem die
Nenner des ersten Ausdrucks auf der rechten Seite und des zweiten
Ausdrucks auf der rechten Seite so, wie sie in der Gleichung (2) gezeigt
sind, gleich sind. Dieses Ersatzschaltungsmodell ist ein Reduktionsmodell
(erster Ordnung oder eines ersten Grads), in dem der positive Pol
und der negative Pol nicht besonders voneinander getrennt sind,
dem es jedoch möglich
ist, eine relativ genaue Lade- und Entladecharakteristik der aktuellen
Zelle dazustellen. In
4 ist eine Eingabe in das Modell
der Strom I [A] (Ampere) (die Ladung ist ein positiver Wert und
die Entladung ist ein negativer Wert) und eine Ausgabe des Modells
ist eine Klemmenspannung V [V]. Vo [V] bezeichnet eine Leelaufspannung
(oder auch eine elektromotorische Kraft oder offene Spannung genannt).
K bezeichnet einen inneren Widerstand, T
1 und
T
2 bezeichnen Zeitkonstanten. Das Zellenmodell
kann mit der folgenden Gleichung (3) ausgedrückt werden. Es wird angemerkt,
dass s einen Laplace-Transformationsoperator
bezeichnet.
-
Es
wird angemerkt, dass A(s) und B(s) Polynome von s bezeichnen, n
einen Grad (Ordnungszahl) bezeichnet und a
1 ≠ 0 und b
1 ≠ 0.
-
Es
wird angemerkt, dass die Gleichung (3) eine Variation der Gleichung
(2) ist, in der T1·s + 1 für A(s) eingesetzt wird (A(s)
= T1·s
+ 1)) und K·(T2·s
+ 1) für
B(s) eingesetzt wird (B(s) = K·(T2·s
+ 1)). In dem Fall einer solchen Lithiumionen-Batterie können, wenn
eine Annäherung
der Leerlaufspannung relativ schnell erfolgt, die Nenner der ersten
Größe auf der
rechten Seite und der zweiten Größe der rechten
Seite, mit der gleichen Zeitkonstanten T1 dargestellt
werden, wie aus der Gleichung (3) zu sehen ist.
-
Im
Folgenden wird zunächst
eine Vorgehensweise für
die Herleitung des Zellenmodells in der Gleichung (3) zu einem adaptiven
digitalen Filter erklärt
werden. Unter der Annahme, dass ein Wert für den Strom I multipliziert
mit einer variablen Effizienz h als ein Integrationswert von einem
bestimmten Anfangszustand ist, kann die Leerlaufspannung Vo in der
folgenden Gleichung (4) geschrieben werden. Vo = hs ·I (4).
-
Wenn
die Gleichung (4) in die Gleichung (3) eingesetzt wird, wird die
folgende Gleichung (5) angegeben. Wenn die Gleichung (5) neu geordnet
wird, wird die folgende Gleichung (6) angegeben. Wenn ein stabiles Tiefbandfilter
G
lp(s) mit beiden Seiten der Gleichung (6)
multipliziert und neu geordnet wird, wird die folgende Gleichung
(7) angegeben.
Glp(s)·(T1·s2 + s)·V
= Glp(s)·(K·T2·s2 + K·s
+ h)·I (7). -
Ein
Wert für
einen gerade messbaren Strom I und eine Klemmenspannung V, für die Tiefbandfilter
und ein Bandpassfilter verarbeitet werden, ist so, wie in der Gleichung
(8) definiert. Eine Zeitkonstante p aus der Gleichung (8) ist eine
Konstante, die eine Antwortcharakteristik von G
lp(s)
definiert.
-
Wenn
die Gleichung (7) unter Verwendung der Gleichung (8) umgeschrieben
wird, wird dann die folgende Gleichung (9) angegeben. Zudem wird,
wenn die Gleichung (9) umgeformt wird, eine Gleichung (10) angegeben.
T1·V3 +
V2 = K·T2·I3 + K·I2 + h·I1 (9). -
Die
Gleichung (10) gibt eine aus Produkten und Summen bestehende Gleichung
zwischen einem messbaren Wert und unbekannten Parametern an. Die
Gleichung (10) stimmt daher mit einer Standardform (Gleichung (11))
eines allgemeinen adaptiven digitalen Filters überein. Es wird angemerkt,
dass in der Gleichung (11) y = V2, ωT = [V3 I3 I2 I1], θT = [–T1 K·T2 K h]. y = ωT·θ (11).
-
Wenn
der Strom I und die Klemmenspannung V, für die beide ein Filter verarbeitet
wird, für
die Berechnung des adaptiven digitalen Filters verwendet werden,
kann der unbekannte Vektor des Parameters θ geschätzt werden. In dieser Ausführungsform
wird ein so genanntes Zwei-Augen-Fehlerprotokollierungs-Gewinnverfahren ("both eyes trace gain
method"), das einen
Logikfehler des adaptiven Filters (und zwar, dass nach Annähern an
einen Schätzwert
keine genaue Abschätzung
mehr gemacht werden kann, selbst wenn der Parameter geändert wird)
verwendet.
-
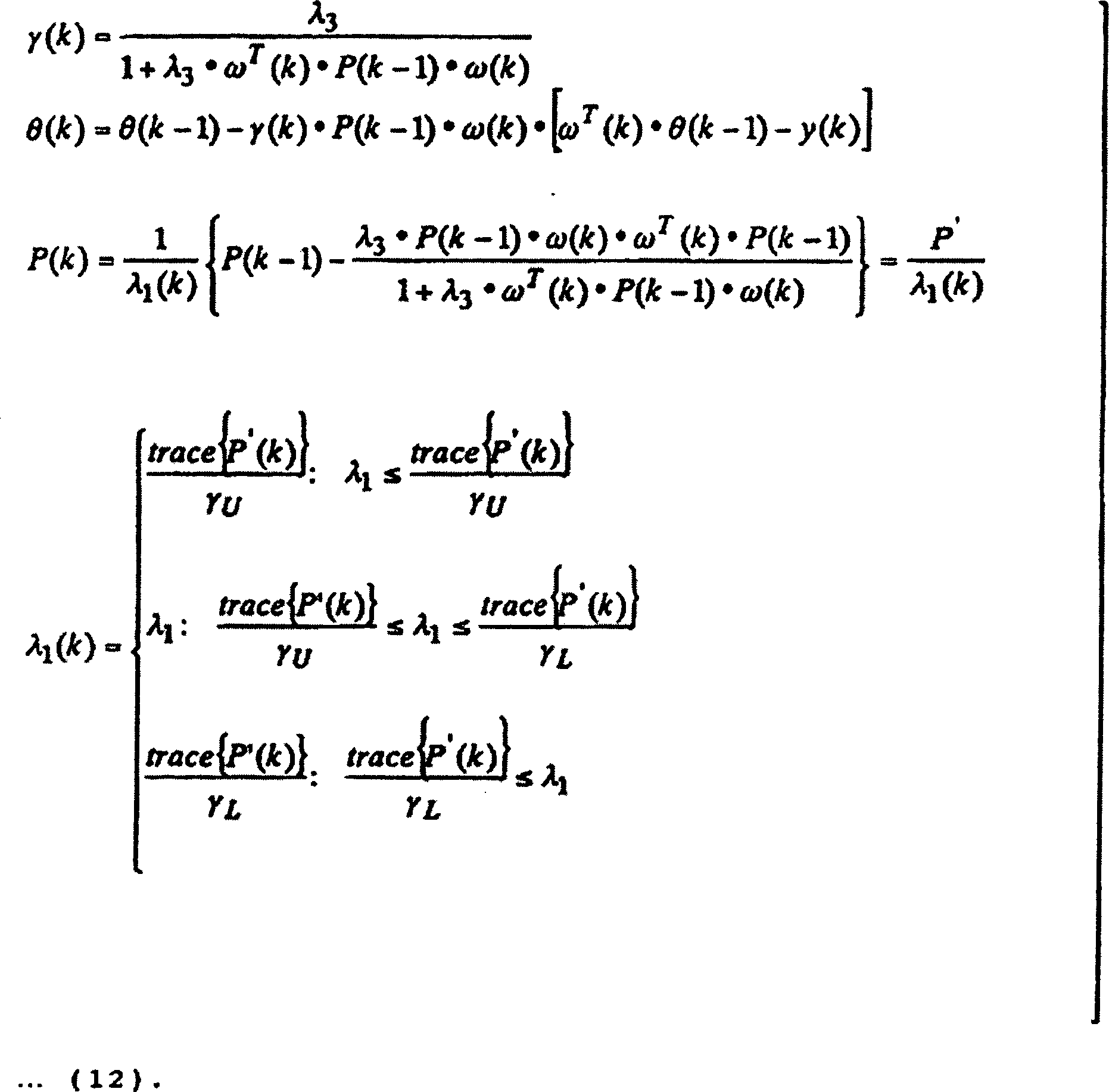
Unter
der Annahme von Gleichung (11) wird ein Algorithmus zum Abschätzen des
Parameters, um einen Vektor des Parameters θ abzuschätzen, in einer Gleichung (12) beschrieben.
Es wird angemerkt, dass die Parameter-Schätzwerte an einem Zeitpunkt
k zu θ(k)
angenommen werden.
- [trace:
Fehlerprotokollierung]
-
In
der Gleichung (12) bezeichnen λ1, λ3, γU, γL eine anfängliche Gruppe von Werten 0 < λ1 < 1, 0 < λ3, < ∞. Daneben
ist P(0) ein ausreichend großer
Anfangswert und trace{P} bezeichnet die Fehlerprotokollierung einer
Matrix P. Auf diese Weise wird die Herleitung des adaptiven digitalen
Filters aus dem Zellenmodell erläutert.
-
6 zeigt
einen funktionsfähigen
Ablaufplan, der von einem Mikrocomputer einer Batterie-Steuereinheit 30 ausgeführt wird.
Der in 6 gezeigte Ablaufplan wird in jedem konstanten
Zeitraum T0 wiederholt. Zum Beispiel ist
I(k) der momentane Wert und I(k – 1) ist der Wert zu dem Zeitpunkt
vor dem momentanen Wert k.
-
In
Schritt S10A misst die Batterie-Steuereinheit 30 den Strom
I(k) und die Klemmenspannung V(k). In Schritt S20A bestimmt die
Batterie-Steuereinheit 30, ob ein Unterbrechungsrelais
der Sekundärzelle 10 in
einem belegten Zustand (geschlossen) oder in einem unterbrochenen
Zustand (offen) ist. Es wird angemerkt, dass die Batterie-Steuereinheit 30 auch
das Unterbrechungsrelais steuert. Wenn das Relais unterbrochen ist (Strom
I = 0), geht der Ablaufplan mit einem Schritt S30A weiter. Wenn
das Relais belegt ist, geht der Ablaufplan mit einem Schritt S40A
weiter. In Schritt S30A bestimmt die Batterie-Steuereinheit 30,
dass die Klemmenspannung V(k) als Anfangswert der Klemmenspannung
V_ini abgespeichert wird. In Schritt S40A
bestimmt die Batterie-Steuereinheit 30 einen
Differenzwert der Klemmenspannung ΔV(k): ΔV(k) = V(k) – V_ini.
Da der Anfangswert des Schätz-Parameters
aufgrund dessen innerhalb des adaptiven digitalen Filters auf ungefähr null eingestellt
wird, werden die Eingaben alle auf Null gesetzt, um dem vorzubeugen,
dass jeder Schätz-Parameter
während
einem Start einer Schätzrechnung
divergiert. Immer wenn das Relais unterbrochen ist, geht der Ablaufplan
mit Schritt S30A weiter. Da I = 0 und ΔV(k) = 0, bleiben die Schätz-Parameter
daher noch in dem Anfangszustand. In Schritt S50A führt die
Batterie-Steuereinheit 30 einen Tiefbandfilter (low pass
filter, LPF) und einen Bandpassfilter (BPF), die auf Basis der Gleichung
(13) verarbeitet werden, für
den Strom I(k) und den Differenzwert der Klemmenspannung ΔV(k) durch,
um I1 aus I3 und
V1 aus V3 zu berechnen.
Zu dieser Zeit wird, um eine Schätzgenauigkeit
des Algorithmus zum Schätzen
der Parameter der Gleichung (12) zu verbessern, eine Antwortcharakteristik
des Tiefbandfilters Glp(s) langsam eingestellt,
so dass das beobachtete Rauschen verringert wird.
-
Es
wird angemerkt, dass diese Antwortcharakteristik schneller als die
Antwortcharakteristik der Zelle eingestellt wird. Die Zeitkonstante
p in der Gleichung (13) ist eine Konstante zum Bestimmen der Antwortcharakteristik
von G
lp(s) während der Gleichung (13).
-
In
Schritt S60A setzt die Steuereinheit 30 den in Schritt
S50A berechneten I3 für I1 und
V3 für
V1 in die Gleichung (12) ein, um den Parameter-Schätzwert θ(k) zu berechnen.
Es wird angemerkt, dass y = V2, ωT = [V3 I3 I2 I1]
und θT = [–T1 K·T2 K h].
-
In
Schritt 70A setzt der Bereitschaftsregler 30 für T1, K·T2 und K aus unter dem in Schritt S60A berechneten
Parameter-Schätzwert θ(k) in die
folgende Gleichung (14) aus unter dem in Schritt S60A berechneten Parameter-Schätzwerten θ(k) in die
Gleichung (14) I1 und I2 und
V1 und V2, die in
der Gleichung (13) berechnet wurden, ein. V0 = (T1·s + 1)·V – K·(T2·s
+ 1)·I
ΔV0 = Glp(s)
=
Glp(s)·{(T1·s + 1)·V – K·(T2·s
+ 1)·I}
=
V1 + T1·V2 – K·T2·I2 – K·I1 (14).
-
Die
Gleichung (14) ist eine Umformung des Zellenmodells (Gleichung (3))
und das Tiefbandfilter Glp(s) wird mit beiden
Seiten multipliziert. Dann wird die Spannungskomponente ΔVo durch
die Leerlaufspannung Vo ersetzt (Vo wird für ΔVo eingesetzt). Da die Leerlaufspannung
nur mäßig schwankt,
kann Vo wie folgt eingesetzt werden: ΔVo = Glp(s)·Vo.
-
Aufgrund
der Höhe
der Schwankungen ΔVo(k)
der Leerlaufspannung ist der Schätzwert
an einem Zeitpunkt, an dem der Start der Schätzberechnungen durchgeführt wird,
der Anfangswert in der späteren
Phase eines Schritts S80A.
-
In
Schritt S80A wird der Anfangswert der Leerlaufspannung, und zwar
ein Anfangswert der Klemmenspannung V_ini zu ΔVo(k), der
in Schritt S70A berechnet wurde, addiert um unter Verwenden der
folgenden Gleichung (15) einen Schätzwert für die Leerlaufspannung Vo(k)
zu berechnen. V0(k)
= ΔV0(k) + V_ini (15).
-
In
Schritt S90A berechnet die Batterie-Steuereinheit 30 einen
Ladestrom SOC (k) aus Vo(k), die im Schritt S80A berechnet wurde,
unter Verwenden eines entsprechenden Abbilds der Leerlaufspannung,
das in 3 gezeigt ist, und des Ladestroms. Es wird angemerkt,
dass die in 3 gezeigte VL eine Leerlaufspannung
ist, die einem SOC = 100% entspricht und die in 3 gezeigte
VH eine Leerlaufspannung ist, die einem SOC = 100% entspricht.
-
In
Schritt S100A berechnet die Batterie-Steuereinheit 30 einen
Schätzwert
für die
Eingabe-Aktivierungsleistung Pin und einen
Schätzwert
für die
Ausgabe-Aktivierungsleistung
Pout. Nachstehend wird unten die ausführliche
Beschreibung des Verfahrens für
die Berechnung des Schätzwerts
für die
Eingabe-Aktivierungsleistung beschrieben werden.
-
In
dem Zellenmodell (Gleichung (3)) wird in einem Fall, in dem eine
Transiente ignoriert wird, die Gleichung (16) erhalten. Das heißt, dass
dies ein quantitatives Zellenmodell bedeutet. V = K·I
+ Vo (16).
-
Es
sei anzunehmen, dass die Klemmenspannung der Zelle, die unmittelbar
vor einer vorgegebenen zu hohen Ladung (oder Überladung) erhalten wird, eine
maximale Aktivierungsspannung Vmax ist und
die Klemmenspannung der Zelle, die unmittelbar vor der vorgegebenen
zu hohen Entladung (oder Überentladung)
erhalten wird, eine minimale Aktivierungsspannung Vmin ist.
Um den Schätzwert
für die
Eingabe-Aktivierungsleistung
Pin zu berechnen, ist es dann erforderlich,
den Wert des Stroms, bei dem die Klemmenspannung die maximale Aktivierungsspannung
Vmax erreicht hat, zu erfassen. Um den maximalen
Eingabestrom Iin_max unter Verwenden der
Gleichung (16) zu berechnen wird daher die Gleichung (16), in der
die Transiente ignoriert wird, verwendet.
-
In
der Gleichung (16) wird entsprechend die maximale Aktivierungsspannung
Vmax für
V eingesetzt, der Schätzwert
K aus unter den in Schritt S60A berechneten Parameter-Schätzwerten θ(k) wird
für K eingesetzt und
der Schätzwert
für die
Spannung des Schaltkreises Vo(k), die in Schritt S80A berechnet
wurde, wird für Vo
eingesetzt, um einen maximalen Eingabestrom Iin_max zu
berechnen.
-
Auf
die gleiche Weise wie in dem Fall des Schätzwerts für die Ausgabe-Aktivierungsleistung
P
out wird entsprechend die minimale Aktivierungsspannung
V
min für
V in die Gleichung (16) eingesetzt, der Schätzwert K von unter den in Schritt
S60A berechneten Parameter-Schätzwerten θ(k) für K eingesetzt
und der Schätzwert für die Spannung
des Schaltkreises Vo(k), die in Schritt S80A berechnet wurde, für Vo eingesetzt,
um den maximalen Ausgabestrom I
out_max zu
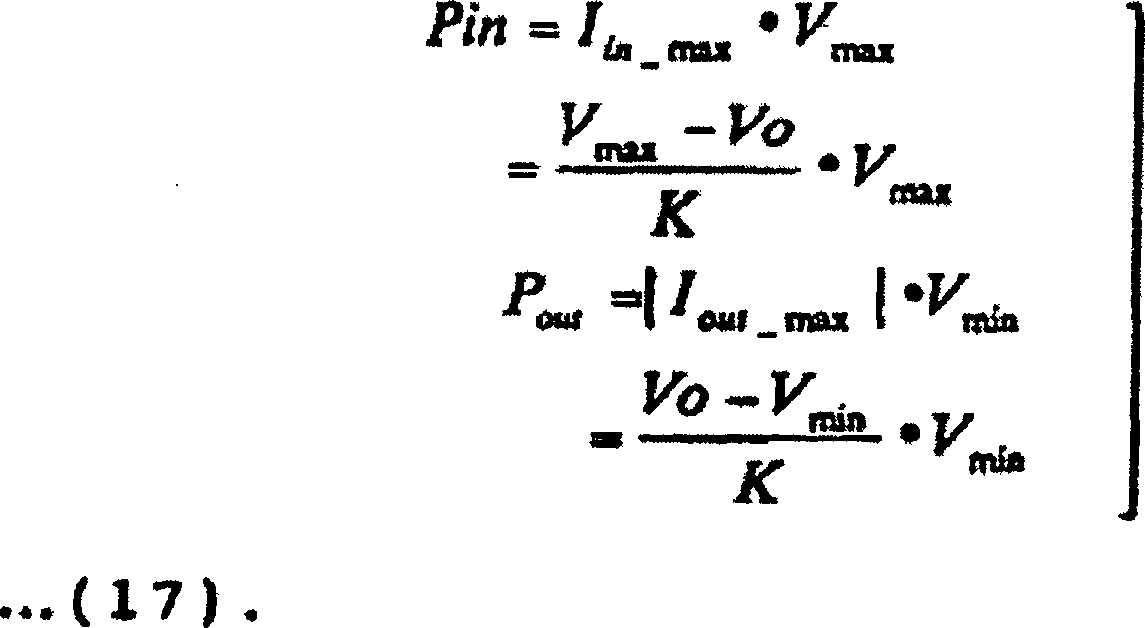
berechnen. Dann werden der Schätzwert
für die
Eingabe-Aktivierungsleistung und ein Schätzwert für die Ausgabe-Aktivierungsleistung
aus der Gleichung (17) berechnet.
-
Die
maximale Aktivierungsspannung Vmax ist eine
Klemmenspannung in einem Fall, in dem die Zelle auf eine Spannung
unmittelbar vor dem zu hohen Laden der Zelle aufgeladen wird. Die
minimale Aktivierungsspannung Vmin ist eine
Klemmenspannung in einem Fall, in dem die Zelle auf einen Wert unmittelbar
vor dem zu hohen Laden der Zelle entladen wird. Die maximale Aktivierungsspannung
Vmax und die minimale Aktivierungsspannung
Vmin sind Variablen, die durch die Art der
Zellen und die Zellentemperatur bestimmt werden. Zum Beispiel können eine
Beziehung zwischen der Zellentemperatur und Vmax,
die zum Beispiel aus Versuchen bestimmt wurde, und eine Beziehung
zwischen der Zellentemperatur und Vmin als
Abbilder gespeichert werden und die Bezugnahme auf ein solches Abbild
kann zum Berechnen von Vmax und Vmin verwendet werden. In einem Schritt S110A
werden Zahlenwerte, die für
die nachfolgende Berechnung erforderlich sind, gespeichert und die
vorliegende Berechnung wird beendet. Vorstehend wurde ein Arbeitsablauf
der ersten Ausführungsform
beschrieben.
-
Im
Folgenden werden unten ein Ablauf und Vorteile der Schätzvorrichtung
für die
Sekundärzelle
in der ersten Ausführungsform
beschrieben werden.
-
Aufgrund
der Beziehung zwischen dem Strom I der Sekundärzelle, der Klemmenspannung
V und der Leerlaufspannung Vo wird die Übertragungsfunktion, wie beispielsweise
in Gleichung (2) in dieser Ausführungsform
angenähert.
Insbesondere in der Gleichung (3) wird es möglich, das adaptive digitale
Filter (allgemein bekannter Schätzalgorithmus),
wie beispielsweise die Methode der kleinsten Quadrate, anzuwenden.
Infolgedessen wird es möglich,
die Parameter in den Gleichungen (Koeffizienten der Polynome (A(s)
und B(s)) integral zu schätzen.
Wenn die Schätzparameter
in die Gleichung (2) eingesetzt werden, kann der Schätzwert für die Leerlaufspannung
Vo leicht berechnet werden.
-
Diese
unbekannten Parameter werden von dem Ladestrom (SOC), der Zellentemperatur
und einem Grad der Beschädigung
beeinflusst. Obwohl bekannt ist, dass sich diese Parameter unverzüglich mit
der Zeit ändern,
kann das adaptive digitale Filter folgerichtig mit einer hohen Genauigkeit
geschätzt
werden. Da die Eingabe-Aktivierungsleistung
Pin und die Ausgabe-Aktivierungsleistung
Pout unter Verwenden von Schätzparametern
für die
Koeffizienten und der Leerlaufspannungen Vo abgeschätzt werden,
können
Eingabe- und Ausgabe-Aktivierungsleistungen Pin und
Pout abgeschätzt werden, selbst wenn sich
die Eingabe- und Ausgabe-Aktivierungsleistungen während des
Lade- oder Entladevorgangs ändern,
wobei deren Änderungen
zum Abschätzen
der Eingabe- und Ausgabe-Aktivierungsleistungen genau nachverfolgt
werden können.
-
Im
Vergleich zu der zweiten bevorzugten Ausführungsform, die später beschrieben
werden wird, wird, da ein leichteres Zellenmodell (die Gleichungen
(2) und (3)) verwendet wird, eine Formalisierung (oder eine Entzerrung)
des adaptiven digitalen Filters einfach, und die Anzahl der Zeitpunkte,
an denen die Berechnungen durchgeführt werden, kann verringert
werden.
-
Die 8A bis
einschließlich 8I zeigen
integral die Ergebnisse von Simulationen der Abschätzungen
der Eingabe- und Ausgabe-Aktivierungsleistungen auf Basis der ersten
Ausführungsform.
-
In
den 8A bis einschließlich 8I werden
die Parameter der Zelle, unter Verwenden einer Zeitdauer von 400
Sekunden als Grenze, schrittweise von einem Wert, der einer hohen
Temperatur entspricht, zu einem Wert, der einer niedrigen Temperatur
entspricht, geändert.
Es wird angemerkt, dass in diesem Beispiel der 8A bis
einschließlich 8I,
wie beispielsweise einer Lithium-Ionen-Batterie, eine Zelle angenommen wird,
in der die Leerlaufspannung schnell angenähert wird. Wie aus den 8A bis
einschließlich 8I erkannt
wird, stimmen die Zeitkonstanten T1, T2 und der innere Widerstand im Wesentlichen
mit realen Werten überein,
selbst wenn die Parameter der Zelle, die angegeben sind, wenn die
Simulationen durchgeführt
werden, schrittweise geändert
werden. Die Schätzwerte
für die
Leerlaufspannung stimmen in ähnlicher
Weise mit den wahren Werten überein.
In der ersten Ausführungsform
wird die Eingabe-Aktivierungsleistung Pin unter Verwenden
der Schätzparameter
für die
Koeffizienten, der offenen Spannung Vo und der maximalen Aktivierungsspannung
Vmax geschätzt. Selbst wenn sich die Parameter
der Zelle und die Leerlaufspannung Vo während des Lade- oder Entladevorgangs
unverzüglich
mit der Zeit ändern,
stimmt der Schätzwert
für die
Ausgabe-Aktivierungsleistung daher genau mit dem wahren Wert (realen
Wert) überein.
-
(Zweite Ausführungsform)
-
Als
nächstes
wird ein Arbeitsablauf der zweiten bevorzugten Ausführungsform
beschrieben werden. Zunächst
wird im Folgenden das in der zweiten Ausführungsform verwendete Zellenmodell
beschrieben werden. 5 zeigt ein Ersatzschaltungsmodell
für die
Sekundärzelle
in der zweiten Ausführungsform.
-
Bevor
das in
1 gezeigte Ersatzschaltungsmodell erläutert wird,
wird hierin die Gleichung (1) beschrieben.
worin A(s), B(s) und C(s)
ein Polynom von s bezeichnen (n bezeichnet eine Ordnungszahl) und
a
1 ≠ 0,
b
1 ≠ 0 und
c
1 ≠ 0.
-
Das
Ersatzschaltungsmodell entspricht einem Fall, in dem die Nenner
der ersten Größe und der
zweiten Größe verschieden
sind, wie in der Gleichung (1) beschrieben ist. Dieses Ersatzschaltungsmodell
ist ein Reduktionsmodell (ersten Grades oder erster Ordnung), in
dem ein positiver Pol und ein negativer Pol nicht besonders voneinander
getrennt sind, jedoch relative genau die Lade- und Entladecharakteristik
der momentanen Zelle angegeben können.
In
5 ist eine Eingabe des Modells der Strom I [A]
(ein positiver Wert gibt die Ladung an und ein negativer Wert gibt
die Entladung an) und eine Ausgabe des Modells gibt die Klemmenspannung
V [V] an und Vo [V] gibt die Leerlaufspannung an (die auch als eine
elektromotorische Kraft oder offene (Leerlauf-)Spannung bezeichnet
wird). Ein Symbol K bezeichnet den inneren Widerstand. T
1 bis einschließlich T
3 bezeichnen
Zeitkonstanten. Dieses Zellenmodell kann so wie in der folgenden
Gleichung (18) ausgedrückt
werden. Es wird angemerkt, dass s einen Laplace-Transformationsoperator
bezeichnet. Als eine Bleibatterie (oder ein Bleiakkumulator) ist
die Annäherung
der Leerlaufspannung in der Zelle sehr langsam, so dass die Beziehung
zwischen T
1 << T
3 gilt.
-
Die
Gleichung (18) ist ein Ersatz für
die Gleichung (1), in der A(s) = T1·s + 1,
B(s) = K·(T2·s
+ 1). Zunächst
wird unten die Herleitung des in der Gleichung (18) gezeigten Zellenmodells
zu dem adaptiven digitalen Filter erläutert werden.
-
Die
Leerlaufspannung Vo kann durch den Wert für den Strom I multipliziert
mit einer variablen Effizienz h, die als Integrationswert von einem
bestimmten Anfangszustand aus, angesehen werden kann, geschrieben werden. V0 = hs ·I (19).
-
Wenn
die Gleichung (19) in die Gleichung (18) eingesetzt wird, wird die
folgende Gleichung (20) erhalten. Nach Umordnen wird die folgende
Gleichung (21) erhalten.
s·(T1·s
+ 1)(T3·s + 1)·V = K·(T2·s + 1)(T3·s
+ 1)·s·I + h·(T1·s
+ 1)·I
{T1·T3·s3 + (T1 + T3)·s2 + s}·V
=
{K·T2·T3·s3 + K·(T2 + T3)·s2 + (K + h·T1)·s + (K
+ h·T1)·s
+ h}·I
(a·s3 + b·s2 + s)·V
= (c·s3 + d·s2 + e·s
+ f)·I (21). -
Es
wird angemerkt, dass die in der Gleichung (21) gezeigten Parameter
wie folgt umschrieben werden: a =
T1·T3, b = T1 + T3, c = K·T2·T3
d = K·(T2 +
T3), e = K + h·T1,
f = h (22).
-
Wenn
ein stabiles Tiefbandfilter Gl(s) in beide Seiten der Gleichungen
(21) und umgeordnet wird, wird die folgende Gleichung (23) erhalten.
-
Ein
Wert für
jeden von dem gerade messbaren Strom I und der Klemmenspannung V,
für die
das Tiefbandfilter verarbeitet wird und ein Bandpassfilter verarbeitet
wird, ist, wie in einer Gleichung (24) gezeigt ist, definiert. In
der Gleichung (24) bezeichnet p
1 eine Zeitkonstante,
die die Antwortcharakteristik von G
l(s)
bestimmt.
-
Wenn
die Gleichung (23) unter Verwenden der in Gleichung (24) gezeigten
Variablen umgeschrieben wird, ergibt sich eine Gleichung (25). Wenn
diese umgeformt wird, wird die folgende Gleichung (26) erhalten.
a·V3 + b·V2 + V1 = c·I3 + d·I2 + e·I1 + f·I0; und
V1 = –a·V3 –b·V2 + c·I3 + d·I2 + e·I1 + f·I0 (25). -
Da
die Gleichung (26) eine aus Produkten und Summen bestehende Gleichung
zwischen messbaren Werten und unbekannten Parametern angibt, stimmt
die Gleichung (26) mit einer Standardform (Gleichung (27)) eines
allgemeinen adaptiven digitalen Filters überein. Es wird angemerkt,
dass ωT einen transponierten Vektor bezeichnet,
in dem eine Zeile und eine Spalte eines Vektors ω durch einander ersetzt sind. y = ωT·θ (27).
-
Es
wird angemerkt, dass y = V
1 -
Das
Verwenden der Berechnung des adaptiven digitalen Filters wird daher
für die
von dem Filter verarbeiteten Signale, durch die der Strom I und
die Klemmenspannung V durch den Filter verarbeitet werden, verwendet,
so dass der Parameter für
den unbekannten Vektor θ geschätzt werden
kann. In dieser Ausführungsform
wird das einfache Zwei-Augen-Fehlerprotokollierungs-Gewinnverfahren
("both eyes trace
gain method") verwendet,
das den logischen Fehler (die genaue Abschätzung kann nicht wiederholt
werden, wenn der abgeschätzte
Wert angenähert
wurde) des adaptiven Filters mit Hilfe der Methode der kleinsten
Quadrate verbessert. Unter der Prämisse der Gleichung (27) wird
ein Algorithmus zum Abschätzen
der Parameter zum Abschätzen
des Parameters für
den unbekannten Vektor θ wie
in der folgenden Gleichung (28) angegeben. Es wird angemerkt, dass
der Parameter-Schätzwert
an dem Zeitpunkt k zu θ (k)
angenommen wird.
- [trace:
Fehlerprotokollierung]
-
Es
wird angenommen, dass λ1, λ3, γU und γL zu Beginn eingestellte Werte sind und dass
0 < λ1 < 1 und 0 < λ2 (k) < ∞. P(0)
weist einen ausreichen hohen Anfangswert und einen ausreichend kleinen
Anfangwert, der nicht null ist, auf. trace{P} bezeichnet die Fehlerprotokollierung
einer Matrix P Auf diese Weise wurde die Herleitung des Zellenmodells
zu dem adaptiven digitalen Filter beschrieben.
-
7 zeigt
einen funktionsfähigen
Ablaufplan, der von einem Mikrocomputer einer Batterie-Steuereinheit
30 ausgeführt wird.
Der in
7 gezeigte Ablaufplan wird immer dann ausgeführt, wenn
eine konstante Zeitdauer To verstrichen ist. Zum Beispiel bezeichnet
I(k) den momentanen Wert und I(k – 1) bezeichnet einen vorherigen
Wert, wie in der ersten Ausführungsform
beschrieben wurde. In
7 sind die Inhalte der Schritte S10B
bis einschließlich
S40B die gleichen, wie jene der Schritte S10A bis einschließlich S40A,
die in
6 beschrieben sind. Die Erläuterung derselben wird hierin
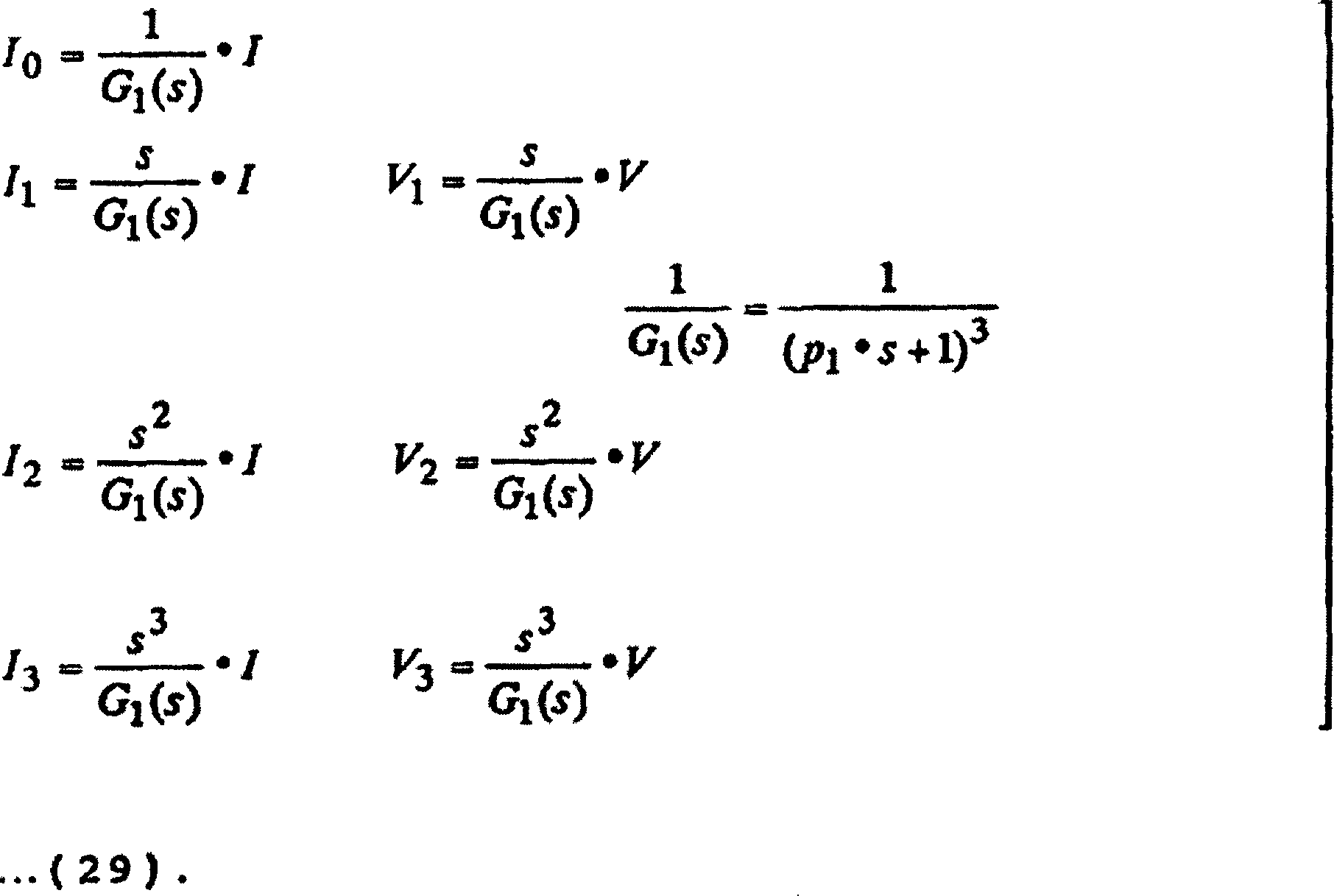
daher weggelassen werden. In Schritt S50B wird das Tiefbandfiltern
und das Bandpassfiltern für
den Strom I(k) und den Differenzwert der Klemmenspannung ΔV(k) auf
Basis der folgenden Gleichung (29) ausgeführt, um Io(k) durch I
3(k) und V
1(k) durch
V
3(k) zu berechnen.
-
Es
wird angemerkt, dass in diesem Fall, um eine Abschätzgenauigkeit
des Algorithmus zum Abschätzen
der Parameter der Gleichung (28) zu verbessern, die Antwortcharakteristik
des Tiefbandfilters Gl(s) auf so langsam
eingestellt wird, dass das beobachtete Rauschen verringert wird.
Wenn die Antwortcharakteristik des Tiefbandfilters Gl(s)
jedoch schneller ist als die Antwortcharakteristik (ein ungefährer Wert
für die
Zeitkonstante T1 ist bereits bekannt) des
Zellenmodells, kann nicht jeder Parameter des Zellenmodells genau
bestimmt werden. P1 in der Gleichung (29)
ist eine Konstante, die die Antwortcharakteristik von Gl(s)
bestimmt.
-
In
einem Schritt S60B ersetzt die Steuereinheit
30 in der
Gleichung (28) I
o(k) durch I
3(k)
und V
1(k) durch V
3(k).
Die Berechnung gemäß der Gleichung
(28), die den Algorithmus zum Abschätzen der Parameter darstellt,
wird dann berechnet, um den Parameter-Schätzwert θ(k) zu bestimmen. Es wird angemerkt,
dass y(k), ω
T(k) und θ(k)
in der folgenden Gleichung (30) angegeben sind.
-
In
einem Schritt S70B werden die Prozesse des Filterns mit einem Tiefbandfilter
und einem Bandpassfilter auf Basis des Stroms I(k) und des Differenzwerts
der Klemmenspannung ΔV(k)
auf Basis der Gleichung (34) durchgeführt, um I
4(k)
bis einschließlich
I
6(k) und V
4(k)
bis einschließlich
V
6(k) zu berechnen. a bis e aus unter den
in Schritt S60B berechneten Parameter-Schätzwerten θ(k) werden in die Gleichung
(33), die eine Umformung der Gleichung (18) ist, eingesetzt, um ΔVo zu berechnen,
die anstelle der Leerlaufspannung Vo verwendet wird. Da die Leerlaufspannung
Vo nur mäßig schwankt,
kann ΔVo
eingesetzt werden. Es wird angemerkt, dass die Herleitung in Schritt
S70B das Ausmaß der
Schwankungen ΔVo(k)
der Leerlaufspannungen Vo(k) von einem Zeitpunkt an ist, an dem
die Berechnung der Abschätzung
begonnen wird. Der Anfangswert wird daher in einem späteren Schritt
S90B aufaddiert. Es wird angemerkt, dass sich bei der Herleitung
der Gleichung (33) K in der Gleichung (32) und e aus der Gleichung
(33) strikt voneinander unterscheiden. Physikalisch gesehen ist
K >> h·T
1,
e wird K angenähert
(e ist ungefähr
gleich K, e ≅ K).
Da der ungefähre
Wert für T
1 des Zellparameters als mehrere Sekunden
bekannt ist, wird daneben t
1 in der Gleichung
(34) auf einen Wert nahe dem ungefähren Wert von T
1 eingestellt.
Da eine Größe von (T
1·s
+ 1), die auf einem Zählen
in der Gleichung (33) beruht, gelöscht werden kann, kann die
Abschätzungsgenauigkeit
der Leerlaufspannung Vo verbessert werden.
-
In
der Gleichung (33) ist a = T
1·T
3, b = T
1 + T
3, c = K·T
2·T
3, d = K·(T
2 +
T
3), c = K + h·T
1 ≈ K.
-
Wenn
der berechnete ΔVo(k)
in eine Gleichung (35) eingesetzt wird, wird der Schätzwert ΔVo'(k) nur an einem
Ausdruck auf der rechten Seite des Zellenmodells (bezogen auf die
Gleichung (18)) berechnet. Vo(k) bezeichnet einen Schätzwert für die Leerlaufspannung
selbst, die durch die Gleichung (18) angenähert wird und Vo' bezeichnet einen
Schein-Schätzwert für die Leerlaufspannung,
die an der Klemmenspannung erscheint. Es wird jedoch angemerkt,
dass bei der Herleitung der Gleichung (35) T
3 auf
der rechten Seite sich strikt von b auf der rechten Seite unterscheidet.
Physikalisch gesehen ist, da T
3 >> T
1, b = T
3 + T
1 ≒ T
3.
-
Die
Gleichung (35) entspricht Vo/C(s). Das heißt, dass Vo = ΔVo und C(s)
= T3·s
+ 1 ≒ b·s + 1.
-
In
einem Schritt S80B der 7 wird der Anfangswert für die Leerlaufspannung,
und zwar der Anfangswert für
die Klemmenspannung V_ini, zu jedem Vo(k)
und Vo'(k), die
in Schritt S70B berechnet wurden, addiert. Das heißt, dass
der Schätzwert
für die
Leerlaufspannung Vo(k) unter Verwenden der Gleichung (36) berechnet
wird und der Schätzwert
für die
Schein-Leerlaufspannung Vo'(k)
unter Verwenden der folgenden Gleichung (37) berechnet wird. Es
wird angemerkt, dass de Schätzwert
Vo' nicht der Schätzwert Vo' für die Leerlaufspannung
Vo selbst ist, sondern der Schätzwert
für die
Schein-Leerlaufspannung, die an der Klemmenspannung erscheint. Vo(k) = ΔV1(k) + V_ini (36). Vo'(k)
= ΔVo'(k) + V_ini (37).
-
In
einem Schritt S90B berechnet die Batterie-Steuereinheit 30 den
Ladestrom SOC(k) aus der in Schritt S80B berechneten Vo(k) unter
Verwenden des Abbilds der Zuordnung zwischen der Leerlaufspanne und
dem Ladestrom, die in 3 gezeigt ist. Er wird angemerkt,
dass die in 3 gezeigte VL die
Leerlaufspannung ist, die einem SOC = 0% entspricht und VH die Leerlaufspannung ist, die einem SOC
= 100% entspricht. In einem Schritt S100B bestimmt die Batterie-Steuereinheit 30,
ob der Schätzwert
Vo(k) gleich oder größer als
der Schätzwert
für die
Leerlaufspannung Vo'(k)
ist. Diese Bestimmung in Schritt S100B dient dazu herauszufinden,
welcher von beiden näher
an einer maximalen Aktivierungsspannung Vmax oder
einer minimalen Aktivierungsspannung Vmin liegt.
Es wird angemerkt, dass die maximale Aktivierungsspannung Vmax oder die minimale Aktivierungsspannung
Vmin eine Variable ist, die durch die Arten
der Zellen und die Temperatur in der Zelle bestimmt wird. Das Verfahren
für die
Berechnung ist ein allgemein bekanntes Verfahren, so dass sie unter
Verwenden einer allgemein bekannten Technik, wie sie beispielsweise
in der ersten Ausführungsform
beschrieben ist, bestimmt werden können. In Schritt S100B geht
der Ablaufplan, wenn Vo'(k) ≥ Vo(k) mit
Schritt S110B weiter. Wenn Vo'(k) < Vo(k), geht der
Ablaufplan mit einem Schritt S120B weiter. In einem Schritt S110B berechnet
die Batterie-Steuereinheit 30 den Schätzwert für die Eingabe-Aktivierungsleistung
Pin und den Schätzwert für die Ausgabe-Aktivierungsleistung
Pout. In dem Zellenmodell (Gleichung (18))
wird das Zellenmodell in dem Fall in der Gleichung (38) ausgedrückt, in
dem eine Transiente ignoriert wird und dies bezeichnet ein quantitatives
Zellenmodell. Um den Schätzwert
für die
Eingabe-Aktivierungsleistung
Pin zu berechnen, wird der momentane Wert
zum Erreichen der maximalen Aktivierungsleistung Vmax benötigt. Der
maximale Eingabestrom Iin_max wird daher
unter Verwenden der Gleichung (38), in der die Transiente ignoriert
wird, berechnet. Das heißt,
dass in Schritt S110B, da Vo'(k) ≥ Vo(k), Vo'(k) näher an der
maximalen Aktivierungsspannung Vmax liegt,
und Vo(k) näher
an der minimalen Aktivierungsspannung Vmin liegt.
Um den Schätzwert
für die
Eingabe-Aktivierungsspannung
Pin zu berechnen wird daher die maximale
Aktivierungsleistungsspannung Vmax für V aus
der Gleichung (38) eingesetzt, der Schätzwert e aus unter den in Schritt
S60B berechneten Schätzwerten für die Parameter θ(k) für K aus
der Gleichung (38) eingesetzt und die in Schritt S80B berechnete
Vo'(k) für Vo aus
der Gleichung (38) eingesetzt, so dass der maximale Eingabestrom
Iin_max aus der Gleichung (38), die aus der
Gleichung (39) erhalten wurde, berechnet wird. V = K·I
+ Vo (38). Vmax = e·Iin_max + V0' (39).
-
Zum
anderen wird für
den Schätzwert
für die
Ausgabe-Aktivierungsleistung Pout die minimale
Aktivierungsspannung Vmin für V eingesetzt,
einer der Parameter- Schätzwerte,
und zwar e aus unter in Schritt S60B berechneten Schätzwerten
für die
Parameter θ(k)
für K eingesetzt,
der in Schritt S80B berechnete Schätzwert für die Leerlaufspannung Vo(k)
für Vo
aus der Gleichung (38) eingesetzt. Die erhaltene Gleichung ist eine
Gleichung (40), zum Berechnen des maximalen Ausgabestroms Iout_max. Vmin = e·Iout_max + Vo (40).
-
Als
nächstes
berechnen die Gleichungen (41A und 41B) unter Verwenden des maximalen
Eingabestroms Iin_max und des maximalen
Ausgabestroms Iout_max, die so, wie oben
beschrieben ist, hergeleitet wurden, einen Schätzwert für die Eingabe-Aktivierungsleistung
(Pin) und einen Schätzwert für die Ausgabe-Aktivierungsleistung
(Pout).
-
Es
wird angemerkt, dass bei der Herleitung des maximalen Eingabestroms
I
in_max und des maximalen Ausgabestroms
I
out_max K in der Gleichung (38), e n den
Gleichungen (39) und (40) sich strikt voneinander unterscheiden.
Physikalisch gesehen ist jedoch K >> h·T
1,
e = K + h·T
1 ≒ K.
-
In
einem Schritt S120B berechnet die Batterie-Steuereinheit 30 einen
Schätzwert
für die
Eingabe-Aktivierungsleistung Pin und einen
Schätzwert
für die
Ausgabe-Aktivierungsleistung
Da Schritt S120B der Fall ist, in dem Vo'(k) < Vo(k),
liegt Vo(k) näher
an der maximalen Aktivierungsspannung Vmax,
und Vo'(k) liegt
näher an der
minimalen Aktivierungsspannung Vmin. Um
den Schätzwert
für die
Eingabe-Aktivierungsleistung
Pin, die maximale Aktivierungsspannung Vmax, den Schätzwert e von unter in Schritt
S60B berechneten Schätzwerten für die Parameter θ(k) zu berechnen,
wird daher eine Gleichung (42), die durch Einsetzen von Vo(k), das
in Schritt S80B berechnet wurde, in die Gleichung (38) erhalten
wurde, verwendet. Dadurch wird eine Gleichung (43) erhalten. Der
maximale Ausgabe-Aktivierungsstrom Iout_max wird
unter Verwenden der Gleichung (43) berechnet. Vmax = e·Iin_max + Vo (42). Vmin = e·Iout_max + Vo (43)
-
Als
nächstes
werden unter Verwenden des maximalen Eingabestroms I
in_max und
des maximalen Ausgabestroms I
out_max der
Schätzwert
für die
Eingabe-Aktivierungsleistung P
in und der
Schätzwert
für die
Ausgabe-Aktivierungsleistung P
out aus den
Gleichungen (44A) und (44B) berechnet, wie nachstehend beschrieben werden
wird.
-
In
einem Schritt S130B speichert eine Batterie-Steuereinheit 30 Zahlenwerte,
die für
die nächste
Berechnung benötigt
werden, und die vorliegende Berechnung ist beendet. Die zweite bevorzugte
Ausführungsform
der Schätzvorrichtung
wurde beschrieben.
-
Als
nächstes
werden unten der Ablauf und Vorteile der zweiten Ausführungsform
der Schätzvorrichtung
beschrieben werden. In der zweiten Ausführungsform ist die Beziehung
aus unter dem Strom I der Sekundärzelle,
der Klemmenspannung V und der Leerlaufspannung Vo so festgelegt,
dass sie mit Hilfe der Übertragungsfunktion,
wie beispielsweise der Gleichung (1) (im Besonderen Gleichung (18)),
angenähert
werden kann, wobei es möglicht
is, den adaptiven digitalen Filter des Verfahrens der kleinsten
Quadrate anzuwenden. Infolgedessen wird es wahrscheinlich, die Parameter
zu einem Zeitpunkt (die Koeffizienten der Polynome von A(s), B(s)
und C(s)) integral abzuschätzen.
Da die Schätzparameter
in die Gleichung (1) eingesetzt werden, kann der Schätzwert für die Leerlaufspannung
Vo leicht berechnet werden. Diese unbekannten Parameter werden von
einem Ladestrom (SOC und zwar Ladezustand, state of charge) einer
Umgebungstemperatur der Sekundärzelle
beeinflusst und ein Grad der Beschädigung ändert sich unverzüglich (kontinuierlich)
mit der Zeit. Die sequentielle Abschätzung kann mit Hilfe eines
adaptiven digitalen Filters mit einer hohen Genauigkeit vorgenommen
werden, da die Eingabe-Aktivierungsleistung Pin und
die Ausgabe-Aktivierungsleistung
Pout unter Verwenden der Schätzkoeffizienten(-parameter)
und der Leerlaufspannung Vo abgeschätzt werden. Daher kann, selbst
wenn sich, gleichzeitig mit den Schwankungen der Parameter der Zelle
während
des Lade- und Entladevorgangs die Eingabe- und Ausgabe-Aktivierungsleistungen
Pin und Pout ändern, das
adaptive digitale Filter deren Schwankungen genau verfolgen, so
dass die Eingabe- und
Ausgabe-Aktivierungsleistungen genau abgeschätzt werden können.
-
Die 9A bis
einschließlich 9J zeigen
integral das Ergebnis einer Simulation der Abschätzungen der Eingabe-/Ausgabe-Aktivierungsleistung
auf Basis der zweiten Ausführungsform.
In den 9A bis einschließlich 9J ändern sich,
mit einer Zeitdauer von 500 Sekunden als Begrenzung, die Parameter
der Zelle schrittweise von einem Wert, der einer niedrigen Temperatur
entspricht, zu einem Wert, der einer hohen Temperatur entspricht.
In dem Fall der Simulation wird, soweit eine Zeitkonstante einer
Verzögerung
der ersten Ordnung, die in dem Zellenmodell (Gleichung (18)) betrachtet
wird, T1 << T3 eingestellt.
Dies wird deshalb vorgenommen, da die Zelle, die eine sehr langsame
Annäherungscharakteristik
der Leerlaufspannung Vo, wie beispielsweise die Bleibatterie, aufweist,
angenommen und eingestellt wird.
-
Wie
aus den 9A bis einschließlich 9J zu
sehen ist, stimmen die Schätzwerte
für die
Parameter a bis einschließlich
e, die von dem adaptiven digitalen Filter ausgegeben werden, mit
ihren realen Werten überein,
selbst wenn sich der Parameter der Zelle, der gegeben ist, wenn
die Simulation durchgeführt
wird, schrittweise (im Wesentlichen in einem rechten Winkel) ändert. Die
Schätzwerte
für die
Leerlaufspannung stimmen daher mit den realen Werten überein.
In der zweiten Ausführungsform
wird die Eingabe-Aktivierungsleistung Pin unter
Verwenden der Schätzparameter
für die
Koeffizienten, der Leerlaufspannung Vo und der maximalen Aktivierungsspannung
Vmax abgeschätzt. Selbst wenn sich der Parameter
der Zelle und die Leerlaufspannung Vo unverzüglich mit der Zeit ändern (oder
kontinuierlich mit der Zeit ändern)
kann der Schätzwert für die Ausgabe-Aktivierungsleistung
daher mit dem realen Wert übereinstimmen.
Es wird angemerkt, dass auf die Entwicklung der Verzögerung der
ersten Ordnung der Zeitkonstante T3 bei
dem realen Wert einer scheinbaren Schein-Leerlaufspannung und der
Klemmenspannung (bezieht sich auf die zweite Größe auf der rechten Seite der
Gleichung (18) des Zellenmodells) Acht gegeben werden muss.
-
Daneben
gibt in der Eingabe-Aktivierungsleistung Pin in
der 9I ein Bezugszeichen (eine Strich-Punkt-Linie),
das in der 9I gezeigt ist, einen Wert an,
der unter Verwenden des Schätzwerts
für die Leerlaufspannung
berechnet wurde. Wie in den 9A bis
einschließlich 9J gezeigt
ist, ist der Schätzwert für die Eingabe-Aktivierungsleistung
(Strich-Punkt-Linie), der unter Verwenden des Schätzwerts
für die
Leerlaufspannung berechnet wurde, größer als der reale Wert der
Eingabe-Aktivierungsleistung.
Dies wird durch die Tatsache bewirkt, dass die Schein-Leerlaufspannung
größer ist
als der reale Wert für
die Leerlaufspannung Vo und näher
an der maximalen Aktivierungsspannung Vmax liegt.
Ausführlich
beschrieben besteht in einem Fall, in dem die Eingabe (Ladung) an
der Zelle unter Verwenden des durch die Strich-Punkt-Linie dargestellten Schätzwerts
für die
Eingabe-Aktivierungsleistung durchgeführt wird, eine Wahrscheinlichkeit,
dass der reale Wert für
die Eingabe-Aktivierungsleistung
in diesem Fall eine maximale Aktivierungsspannung Vmax der
Zelle übersteigt
und die Zelle aufgrund der Überladung
beschädigt
wird. In der zweiten Ausführungsform
wird die Schein-Leerlaufspannung Vo/C(s) (die ΔVo' in der Gleichung (35) entspricht) jedoch
aus den Schätzparametern
für die
Koeffizienten und der Leerlaufspannung Vo berechnet. Unter Verwenden
von einer von Vo und Vo(C(s), die näher an der maximalen Aktivierungsspannung
Vmax liegt, wird die Eingabe-Aktivierungsleistung Pin abgeschätzt. In dem Fall von den 9A bis
einschließlich 9J wird
der Schätzwert
für die
Eingabe-Aktivierungsleistung (durchgezogene Linie) unter Verwenden
der Schein-Leerlaufspannung Vo/C(s), die näher an dem Schätzwert für die maximale
Aktivierungsleistung Vmax (durchgezogene
Linie) liegt, berechnet. Der Schätzwert
für die
Eingabe-Aktivierungsleistung stimmt daher ausreichend mit dem realen
Wert derselben überein
und es besteht daher keine Wahrscheinlichkeit, dass die Eingabe-Aktivierungsleistung
die maximale Aktivierungsleistungsspannung der Zelle übersteigt.
-
Zum
anderen gibt die als Bezug beschriebene Kenngröße (Strich-Punkt-Linie) in
der Spalte der Ausgabe-Aktivierungsleistung Pout in
der 9J einen unter Verwenden des Schätzwerts
für die
Schein-Leerlaufspannung berechneten Wert an. Wie in der 9J gezeigt
ist, ist der unter Verwenden des Schätzwerts für die Schein-Leerlaufspannung
berechnete Ausgabe-Aktivierungsleistung (eine Strich-Punkt-Linie)
größer als der
reale Wert für
die Ausgabe-Aktivierungsleistung. Dies wird durch die Tatsache bewirkt,
dass der Schätzwert
für die
Leerlaufspannung kleiner als die Schein-Leerlaufspannung ist und
näher an
der minimalen Aktivierungsspannung Vmin liegt.
Ausführlich
beschrieben übersteigt
dieser Schätzwert
für die
Ausgabe-Aktivierungsleistung in einem Fall, in dem die Zelle unter
Verwendung des mit der Strich-Punkt-Linie dargestellten Schätzwerts
für die
Ausgabe-Aktivierungsleistung ausgegeben (entladen) wird, eine minimale Aktivierungsspannung
Vmin, so dass die Wahrscheinlichkeit besteht,
dass die Zelle aufgrund einer Überentladung
beschädigt
wird. In der zweiten Ausführungsform
wird die Schein-Leerlaufspannung Vo/C(s) jedoch aus den Schätzparametern
für die
Koeffizienten und der Leerlauf-Aktivierungsspannung Vmin berechnet.
Unter Verwenden von einer von Vo und Vo/C(s), die näher an der
minimalen Aktivierungsspannung Vmin liegt,
werden die Schätzparameter
für die
Koeffizienten und die minimale Aktivierungsspannung Vmin und
die Ausgabe-Aktivierungsleistung Pout abgeschätzt. In
dem Fall von den 9A bis einschließlich 9J wird
der Schätzwert
für die
Ausgabe-Aktivierungsleistung
(durchgezogene Linie) daher unter Verwenden der Leerlaufspannung
Vo, die näher an
der minimalen Aktivierungsleistung Vmin liegt,
berechnet. Der Schätzwert
für die
Ausgabe-Aktivierungsleistung stimmt daher ausreichend mit dem realen
Wert überein,
und es besteht keine Wahrscheinlichkeit, dass der Schätzwert für die Ausgabe-Aktivierungsleistung
eine minimale Aktivierungsspannung Vmin der
Zelle übersteigt.
Es wird angemerkt, dass das in den Schritten S20A und S20B, die
in den 6 und 7 gezeigt sind, dem in der 2 gezeigten
Relais 70 entspricht.

















 und die Gleichung (4, 19) ist:
und die Gleichung (4, 19) ist:
 wobei b = T3 + T1 ≒ T3, und T1 und T3 Zeitkonstanten bezeichnen, wenn die berechnete Leerlaufspannung V0(k) zu dem Zeitpunkt k niedriger ist als die Schein-Leerlaufspannung V'0(k), wobei V0(k) = ΔVo(k) + V_ini, wobei V0(k) = ΔVo(k), wenn die berechnete Leerlaufspannung V0(k) zum Zeitpunkt k niedriger ist als eine Schein-Leerlaufspannung V'0(k).
wobei b = T3 + T1 ≒ T3, und T1 und T3 Zeitkonstanten bezeichnen, wenn die berechnete Leerlaufspannung V0(k) zu dem Zeitpunkt k niedriger ist als die Schein-Leerlaufspannung V'0(k), wobei V0(k) = ΔVo(k) + V_ini, wobei V0(k) = ΔVo(k), wenn die berechnete Leerlaufspannung V0(k) zum Zeitpunkt k niedriger ist als eine Schein-Leerlaufspannung V'0(k).
 wenn die berechnete Leerlaufspannung (V0(k)) zu dem Zeitpunkt k niedriger ist als die Schein-Leerlaufspannung (V'0(k)) bei dem Zeitpunkt k.
wenn die berechnete Leerlaufspannung (V0(k)) zu dem Zeitpunkt k niedriger ist als die Schein-Leerlaufspannung (V'0(k)) bei dem Zeitpunkt k.









 und die Gleichung (4, 19):
und die Gleichung (4, 19):