EP0147256A1 - Alimentation d'un verin en fluide hydraulique en continu et par impulsion controlée - Google Patents
Alimentation d'un verin en fluide hydraulique en continu et par impulsion controlée Download PDFInfo
- Publication number
- EP0147256A1 EP0147256A1 EP84402194A EP84402194A EP0147256A1 EP 0147256 A1 EP0147256 A1 EP 0147256A1 EP 84402194 A EP84402194 A EP 84402194A EP 84402194 A EP84402194 A EP 84402194A EP 0147256 A1 EP0147256 A1 EP 0147256A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- accumulator
- piping
- pressure
- hydraulic
- relay
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 239000012530 fluid Substances 0.000 title claims abstract description 58
- 238000004891 communication Methods 0.000 claims abstract description 10
- 238000000034 method Methods 0.000 claims abstract description 6
- 230000005284 excitation Effects 0.000 claims description 11
- 239000012528 membrane Substances 0.000 claims description 7
- 230000003111 delayed effect Effects 0.000 claims description 4
- 238000006073 displacement reaction Methods 0.000 description 12
- IJGRMHOSHXDMSA-UHFFFAOYSA-N Atomic nitrogen Chemical compound N#N IJGRMHOSHXDMSA-UHFFFAOYSA-N 0.000 description 8
- 230000035939 shock Effects 0.000 description 8
- 230000000694 effects Effects 0.000 description 4
- 229910052757 nitrogen Inorganic materials 0.000 description 4
- 239000004020 conductor Substances 0.000 description 3
- 238000010586 diagram Methods 0.000 description 3
- 101000852483 Homo sapiens Interleukin-1 receptor-associated kinase 1 Proteins 0.000 description 2
- 102100036342 Interleukin-1 receptor-associated kinase 1 Human genes 0.000 description 2
- 230000008901 benefit Effects 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 241000347881 Kadua laxiflora Species 0.000 description 1
- 238000009825 accumulation Methods 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 230000001934 delay Effects 0.000 description 1
- 230000005281 excited state Effects 0.000 description 1
- 238000005555 metalworking Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000007935 neutral effect Effects 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 230000003252 repetitive effect Effects 0.000 description 1
- 239000011435 rock Substances 0.000 description 1
- 239000002689 soil Substances 0.000 description 1
- 238000009987 spinning Methods 0.000 description 1
- 230000009897 systematic effect Effects 0.000 description 1
Images


Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B21/00—Common features of fluid actuator systems; Fluid-pressure actuator systems or details thereof, not covered by any other group of this subclass
- F15B21/12—Fluid oscillators or pulse generators
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B1/00—Installations or systems with accumulators; Supply reservoir or sump assemblies
- F15B1/02—Installations or systems with accumulators
Definitions
- the present invention relates to a method for supplying hydraulic fluid, continuously and by controlled impulse, to a hydraulic cylinder normally operating continuously, and it also relates to a device for implementing this method.
- Hydraulic cylinders working continuously and their hydraulic fluid supply system are well known. They are usually used to move a load or tool in a continuous movement over a distance which can be relatively large. Whether they are working on pushing or pulling, a pressure chamber of the jack is supplied with hydraulic fluid under pressure to move the piston of the jack on a part where its entire stroke in a continuous movement at a speed which depends on the supply pressure and the resistant force encountered by the piston rod of the jack. The return of the piston rod to its starting position is ensured either by means of a spring (single-acting cylinder), or by supplying pressurized fluid to the other chamber of the hydraulic cylinder (double-acting cylinder) .
- the present invention aims to solve this problem.
- the method of the present invention is characterized in that it consists in supplying a pressure chamber of the hydraulic cylinder with hydraulic fluid and, simultaneously, in storing hydraulic energy in an accumulator from a source. of pressurized fluid, as long as the pressure in the pressure chamber of the jack and in the accumulator remains below a selected value, so that the jack normally works continuously, to isolate the accumulator from the source of pressurized fluid when the pressure in the pressure chamber of the cylinder and in the accumulator reaches said selected value, to connect the pressure chamber of the cylinder and the source of pressurized fluid to a reservoir of hydraulic fluid for decreasing the pressure in said pressure chamber, then isolating the pressure chamber of the cylinder from the reservoir, then placing the accumulator in communication with the pressure chamber pressure of the jack to send a pulse of hydraulic fluid thereto, and then isolating the pressure chamber of the jack from the accumulator and re-establishing the connection between the source of pressurized fluid, on the one hand, and the pressure chamber and the accumulator
- the supply device for implementing this method comprises, in a known manner, a pump, a fluid reservoir, a first pipe having a first end and a second end which can be connected to a pressure chamber of a jack. hydraulic, and a main distributor connected to the pump, to the reservoir and the first end of the first piping to put the latter in selective communication with the pump or with the reservoir.
- the supply device is characterized in that it further comprises a first piloted valve which is connected to the first pipe and to the tank and which, in a rest position, isolates the first pipe from the tank and, in a position of work, establishes communication between the first piping and the tank, a second piloted valve which is inserted in the first piping between the second end thereof and the first piloted valve and which, in a rest position, allows the passage of the fluid in the first pipe and, in a working position, cuts said passage, a second pipe having a first and a second end connected to the first pipe respectively between the main distributor and the second piloted valve and between the latter and the second end of the first piping, and in which are inserted in series, from the first end to the second end of the second tu yauterie, a unidirectional valve, a first accumulator and a third piloted valve which, in a rest position, cuts the passage of the fluid in the second piping and, in a working position, authorizes the passage of the fluid
- the supply device shown in Figure 1 comprises in known manner, a pump 1, a reservoir 2 of hydraulic fluid, a main distributor 3 and two pipes. 4 and 5 connected respectively to the two pressure chambers 6 and 7 of the cylinder d 'a double-acting cylinder 8 (only one of the two pipes 4 and 5 would be provided in the case of a single-acting cylinder).
- the main distributor 3 is shown in a neutral position, in which the fluid sucked by the pump 1 in the tank 2 is again discharged to the tank.
- the main distributor 3 When the main distributor 3 is placed in one or other of its two working positions, the fluid sucked by the pump 1 is discharged through the piping 4 to the chamber 6 or through the piping 5 to the chamber 7 , depending on the working position of the main distributor, that of the two chambers 6 and 7 which is not supplied with pressurized fluid being connected through the piping 4 or 5 to the tank.
- the supply device of the present invention further comprises a hydraulic block 9 which, in the case envisaged above, is inserted in the piping 4 between the main distributor 3 and the chamber 6 of the jack 8.
- the hydraulic block 9 comprises a first piloted valve 10, which is inserted into the pipe 4 and which, in its rest position shown in FIG. 1, lets the hydraulic fluid pass through the pipe 4 and, in its working position, establishes communication between the piping 4 and the tank 2.
- the hydraulic block 9 comprises a second piloted valve 11 which is also inserted in the piping 4, between the piloted valve 10 and the chamber 6 of the jack 8, and which, in its rest position shown on the Figure 1, allows the passage of fluid in the pipe 4 and, in its working position, cuts said passage.
- the hydraulic unit 9 further comprises a pipe 12, one end of which is connected to the pipe 4 between the main distributor 3 and the second piloted valve 1 1 , for example between the main distributor 3 and the first piloted valve 10 as shown in Figure 1, and the other end of which is connected to the pipe 4 between the second pilo valve tee 11 and the chamber 6 of the jack 8.
- a pipe 12 In the piping 12 are inserted in series, from the first end towards the second end of the piping 12, a one-way valve 13, an accumulator 14 and a third piloted valve 15.
- the one-way valve 13 is connected so as to allow the passage of the hydraulic fluid only from the main distributor 3 to the accumulator 14. In its rest position shown in FIG.
- the piloted valve 15 cuts the passage of the fluid in the piping 12, while that in its working position, it allows the passage of the fluid from the accumulator 14 to the chamber 6 of the jack 8.
- an adjustable nozzle 16 can be inserted in the piping 12 'downstream of the valve piloted 15 to adjust the flow of hydraulic fluid to the chamber 6 of the cylinder 8 when the piloted valve 15 is in its working position.
- the piloted valves 10, 11 and 15 can be actuated by a sequential control unit 17, which will now be described with reference to FIG. 4.
- the three piloted valves 10, 11 and 15 are solenoid valves which can be actuated by excitation coils or solenoids Sa, Sb and S c, respectively.
- the number 18 designates a current supply source, for example a 12 V or 24 V battery
- the number 19 designates a circuit breaker which, when it is energized, connects two supply conductors 20 and 21 respectively at the terminals of the current source 18.
- the sequential control unit 17 comprises a first relay Re having a normally open contact R, a second and a third relay M 1 and M 2 both having a contact, respectively M 1T and M 2T , normally open and delayed on closing, and a fourth relay M 3 having a contact M 3T normally closed and delayed on opening.
- the duration of the delay of the third relay M 2 is slightly longer than that of the second relay M 1 as will be seen below.
- a first end of the excitation coils Re, M 1 , M 2 ' M 3' Sa, Sb and Sc is connected to the supply conductor 20.
- the other end of the excitation coils Re, M 1 , M 2 , Sa and Sb, the latter through the normally open contact M 1T is connected to the supply conductor 21, on the one hand, through one or the other of two normally open contacts BP and PR connected in parallel and, on the other hand, through the normally open contact R and the normally closed contact M 3T connected in series.
- the other end of the excitation coils. M 3 and Sc is connected to the junction point 22 between the normally open contact R and the normally closed contact M 3T through the normally open contact M 2T .
- the BP contact is a push button contact. It allows manual control of the start of an operating sequence of the solenoid valves 10, 11 and 15, provided that the pressure in the chamber 6 of the jack 8 and in the accumulator 14 has reached a sufficient value, which can be checked by means of one or other of the two manometers 23 and 24 connected to the pipes 4 and 12, respectively ( Figure 1).
- the PR contact is the contact of a pressure switch 25, which makes it possible to automatically control the start of an operating sequence of the solenoid valves 10, 11 and 15 each time the pressure in the chamber 6 of the jack 8 and in the accumulator 14 reaches the triggering threshold of the pressure switch 25.
- the triggering threshold of the pressure switch 25 can for example be adjusted to the maximum pressure that can be supplied by the pump 1, or to a value slightly lower than the maximum pressure.
- Le'pressostat 25 is connected, from the hydraulic point of view, to the pipe 4 between the main distributor 3 and the electro-valve 11.
- the triggering threshold of the pressure switch 25 is set to a pressure of 3 bars 0 0
- the accumulator 14 is a membrane accumulator, inflated with nitrogen at a pressure of 100 bars
- other types of accumulator can be used, for example accumulators in which the active element, membrane or piston, is prestressed by a calibrated spring.
- the piston 26 of the jack 8 and its piston rod 27 are moved outward in a continuous movement. If the piston rod 27 encounters significant resistance at any time during its movement, the fluid pressure rises in the chamber 6 of the cylinder and in the piping 4. As soon as the pressure exceeds 100 bars, the accumulator 14 begins to charge through the one-way valve 13 and to store energy by the displacement of its membrane. If, due to the increase in pressure, the cylinder succeeds in overcoming the resistance opposed to it, the system then resumes functioning normally.
- the normally open contact PR closes, which is represented by the high state in FIG. 5 (in this figure, the closed state of the contacts and the excited state of the coils is represented by the high state. , while the open state of the contacts and the de-energized state of the coils is represented by the low state).
- the closing of the contact PR causes the excitation of the relay Re which closes its contact R, and also the excitation of the relays M 1 and M 2 and of the coil Sa of the solenoid valve 10.
- the relay M 3 and the coils Sb and Sc of the solenoid valves 11 and 15 are not energized since the contacts M 1T and M 2T of the relays M 1 and M 2 are delayed on closing.
- the contact M 2T closes, which has for effect of exciting the relay M3 and the coil Sc of the solenoid valve 15.
- the latter is then switched to its working position and, consequently, the accumulator 14 is connected to the chamber 6 of the jack 8 and sends to the latter an impulse of hydraulic fluid.
- the length of the piping 12 and of the piping 4 between the accumulator 14 and the jack 8 is as short as possible so that the hydraulic fluid pulse is transmitted to the chamber 6 in the shortest possible time.
- the contact M - opens, which has the effect of de-energizing all the relays Re, M1, M 2 and M 3 ' and the coils Sa, Sb, Sc of the solenoid valves 10, 11 and 15. As a result, the sequential control unit 17 is reset.
- each operating sequence of the solenoid valves 10, 11 and 15 is automatically started by the pressure switch 25.
- the push button BP by pressing one or more times on the BP push button, the operator can manually start one or more sequences of operation of the solenoid valves when he notices that a strong resistance is opposed to the displacement of the piston rod 27 or when he finds that the pressure read on either of the gauges 23 and 24 a exceed the inflation pressure of the nitrogen in the accumulator 14 (100 bars in the example considered here).
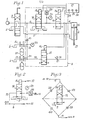
- curve A in solid lines represents the variation over time of the pressure of the hydraulic fluid in the accumulator 14, while curve B in dashed lines represents the variation in time of pressure in chamber 6 of cylinder 8 during a typical example of operation.
- curve B in dashed lines represents the variation in time of pressure in chamber 6 of cylinder 8 during a typical example of operation.
- the case has been represented where a single hydraulic shock C is sufficient to overcome the resistance which opposes the displacement of the piston rod 27, while in the middle part of the same graph we represented the case where three successive hydraulic shocks C 1 . C 2 and C 3 are necessary to overcome the resistance which opposes the displacement of the piston rod 27.
- C 1 . C 2 and C 3 are necessary to overcome the resistance which opposes the displacement of the piston rod 27.
- the lower horizontal line H represents the inflation pressure of the nitrogen in the accumulator 14
- the upper horizontal line H 2 represents the maximum pressure that can be supplied by pump 1 and also the triggering threshold of the pressure switch 25, and the area between the two lines H 1 and H 2 represents the working range of the accumulator 14
- a or several other accumulators such as accumulator 29 shown in FIG. 1, the other additional accumulator (s) having a membrane which is prestressed at a pressure different from that of the membrane of accumulator 14.
- valves 30 and 31 are provided to selectively put the accumulator 14 or the accumulator 29 in communication with the piping 12, while the valves 32 and 33 are provided to put the unused accumulator 14 or 29 in communication with the tank 2.
- the time delays of the relays M 1 , M 2 and M 3 can be adjusted for example by means of adjustment buttons 34, 35 and 36, respectively, accessible on one face of the case of the sequential control unit 17 (figure 1).
- the piloted valve 11 when the piloted valve 11 is in its rest position, the hydraulic fluid flows from left to right through this valve when the chamber 6 of the jack is normally supplied with fluid under pressure (piloted valve 10 in its rest position), while the hydraulic fluid flows from right to left through the piloted valve 11 when the chamber 6 is connected to the reservoir 2 through the piloted valve 10 in its working position.
- the piloted valve 11 can be connected, from the hydraulic point of view, as shown in FIG. 3. More specifically, four unidirectional valves 38, 39, 40 and 41, mounted in a Wheatstone bridge, are inserted in the piping.
- the present invention finds application in many fields of technology. Examples include metalworking (presses for spinning, drawing, stamping, stamping) and working of soils and rocks (hydraulic shovels leagues working in retro or loader, civil or agricultural engineering tractor working in rippage, etc.) and, in general, in all cases where a hydraulic cylinder normally working continuously must be able to provide a momentary dynamic force, in any point of its course, to overcome an increase in resistance during the displacement of its piston rod.
- FIG. 7 a hydraulic shovel 42 comprising, in a known manner, an arrow 43, which is pivotally mounted at its rear end on the chassis and which can be actuated by a jack 45, a pendulum 46, which is pivotally mounted at its rear end on the front end of the boom 43 and which can be actuated by a jack 47, and a bucket 48, provided with knockout teeth 49, which is pivotally mounted at the rear at the end front of the pendulum 46 and which can be actuated by a jack such as the jack 8 of FIG. 1, by means of a spreader 50 and a link 51.
- the jack 8 is carried by the stick 46 on which are also arranged the hydraulic block 9 and the accumulator 14 of Figure 1.
- FIG 8 there is shown the front part of the hydraulic shovel 42 of Figure 7, with a pendulum 46 equipped with a bucket 48 mounted loader .
- the unidirectional valve 13 (FIG. 1) can be replaced by a piloted valve identical to the piloted valve 11 and which, in a rest position, authorizes the passage of the hydraulic fluid through the piping 12 towards the accumulator 14 or 29 and, in a working position, cuts said passage.
- the sequential control unit 17 must actuate the piloted valve 13 at the same time as the piloted valve 10.
- the sequential control unit 17 can be produced in the form of electronic circuits with transistors or integrated circuits.
- pilot operated valves can be used by compressed air or by hydraulic fluid.
- the sequential control unit 17 may itself be constituted by switches and delay circuits operating with compressed air or with a hydraulic fluid under pressure.
- the jack 8 works mainly in the thrust. If it works mainly in traction, it is enough to connect the piping 5 to the chamber 6 and the piping 4 to the chamber 7.
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Fluid Mechanics (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Analytical Chemistry (AREA)
- Chemical & Material Sciences (AREA)
- Fluid-Pressure Circuits (AREA)
- Operation Control Of Excavators (AREA)
- Lifting Devices For Agricultural Implements (AREA)
- Refuse Collection And Transfer (AREA)
- Reciprocating Pumps (AREA)
- Electrical Discharge Machining, Electrochemical Machining, And Combined Machining (AREA)
- Actuator (AREA)
- Portable Nailing Machines And Staplers (AREA)
- Press Drives And Press Lines (AREA)
Abstract
Description
- La présente invention concerne un procédé pour alimenter en fluide hydraulique, en continu et par impulsion contrôlée, un vérin hydraulique travaillant normalement en continu, et elle concerne également un dispositif pour la mise en oeuvre de ce procédé.
- Les vérins hydrauliques travaillant en continu et leur système d'alimentation en fluide hydraulique sont bien connus. Ils sont habituellement utilisés pour déplacer une charge ou un outil en un mouvement continu sur une distance qui peut être relativement importante. Qu'ils travaillent à la poussée ou à la traction, une chambre de pression du vérin est ali- mentée en fluide hydraulique sors pression pour déplacer le piston du vérin sur une partie où la totalité de sa course en un mouvement continu à une vitesse qui dépend de la pression d'alimentation et de l'effort résistant rencontré par la tige de piston du vérin. Le retour de la tige de piston à sa position d'un départ est assuré soit au moyen d'un ressort (vérin à simple effet), soit en alimentant en fluide sous pression l'autre chambre du vérin hydraulique (vérin à double effet).
- On connaît par ailleurs des systèmes d'alimentation en fluide hydraulique à accumulation d'énérgie pour des appareils hydrauliques travaillant en alternatif, par exemple des marteaux piqueurs ou des _brise-roche hydrauliques, dans lesquels le piston du vérin agit sur un outil comme un marteau à mouvement altérnatif. Dans ce cas, le système d'alimentation émet toujours et à chaque course du piston une seule impulsion hydraulique à énergie constante. Chaque impulsion hydraulique déplace le piston sur la totalité de sa course. Du fait de leur aspect répétitif, on peut dire que ces systèmes connus s'apparentent à des vibreurs. Leur emploi ne peut porter que sur des vérins de faible course (de l'ordre de 10 cm).
- L'impulsion hydraulique étant systématique, il n'est pas tenu compte, de ce fait, de la résistance effective rencontrée au déplacement du piston du vérin, et on ne cherche pas à moduler la quantité et la valeur d'une énergie hydraulique d'appoint en fonction des paramètres d'utilisation.
- Dans de nombreux domaines de la technique, il arrive que la tige de piston d'un vérin hydraulique travaillant normalement en continu rencontre un accroissement de résistance dans une position donnée de sa course ou, occasionnellement, dans une position quelconque de sa course. On peut, bien entendu, dimensionner la pompe et les circuits hydrauliques du dispositif d' alimentation de telle façon que celui-ci soit capable de fournir au vérin une pression hydraulique suffisante pour vaincre un tel accroissement de résistance. Toutefois, cela oblige à surdimensionner le dispositif d'alimentation par rapport aux besoins courants. De toutes façons, si l'accroissement de résistance est tel que la pression dans le vérin devient supérieure à la pression maximale que peut fournir la pompe, le vérin ne peut plus travailler.
- Il serait donc utile de fournir un dispositif d'alimentation tel qu'un vérin travaillant normalement en continu soit capable de produire un effort dynamique momentané, dans une position quelconque de sa course, pour surmonter un accroissement de résistance au cours du déplacement de sa tige de piston, sans qu'il soit nécessaire à cet effet de surdimensionner le dispositif d'alimentation.
- La présente invention à pour but de résoudre ce problème.
- A cet effet, le procédé de la présente invention est caractérisé en ce qu'il consiste à alimenter une chambre de pression du vérin hydraulique en fluide hydraulique et, simultanément, à emmagasiner de l'énergie hydraulique dans un accumulateur à partir d'une source de fluide sous pression, tant que la pression dans la chambre dé pression du vérin et dans l'accumulateur reste inférieure à une valeur choisie, de telle façon que le vérin travaille normalement en continu, à isoler l'accumulateur par rapport à la source de fluide sous pression quand la pression dans la chambre de pression du vérin et dans l'accumulateur atteint ladite valeur choisie, à relier la chambre de pression du vérin et la source de fluide sous pression à un réservoir de fluide hydraulique pour faire chuter la pression dans ladite chambre de pression, à isoler ensuite la chambre de pression du vérin par rapport au réservoir, à mettre ensuite l'accumulateur en communication avec la chambre de pression du vérin pour y envoyer une impulsion de fluide hydraulique, et, ensuite, à isoler la chambre de pression du vérin par rapport à l'accumulateur et à rétablir la liaison entre la source de fluide sous pression, d'une part, et la chambre de pression et l'accumulateur, d'autre part, et à les maintenir dans cet état tant que la pression dans la chambre de pression et dans l'accumulateur n'atteint pas à nouveau ladite valeur choisie.
- Le dispositif d'alimentation pour la mise en oeuvre de ce procédé comprend, de façon connue, une pompe, un réservoir de fluide, une première tuyauterie ayant une première extrémité et une seconde extrémité pouvant être reliée à une chambre de pression d'un vérin hydraulique, et un distributeur principal relié à la pompe, au réservoir et la première extrémité de la première tuyauterie pour mettre cette dernière en communication sélectivement avec la pompe ou avec le réservoir. Le dispositif d'alimentation est caractérisé en ce qu'il comprend en outre une première valve pilotée qui est reliée à la première tuyauterie et au réservoir et qui, dans une position de repos, isole la première tuyauterie du réservoir et, dans une position de travail, établit une communication entre la première tuyauterie et le réservoir, une deuxième valve pilotée qui est insérée dans la première tuyauterie entre la seconde extrémité de celle-ci et la première valve pilotée et qui, dans une position de repos, autorise le passage du fluide dans la première tuyauterie et, dans une position de travail, coupe ledit passage, une deuxième tuyauterie ayant une première et une deuxième extrémité raccordées à la première tuyauterie respectivement entre le distributeur principal et la deuxième valve pilotée et entre cette dernière et la deuxième extrémité de la première tuyauterie, et dans laquelle sont insérés en série, depuis la première extrémité vers la deuxième extrémité de la deuxième tuyauterie, une valve unidirectionnelle, un premier accumulateur et une troisième valve pilotée qui, dans une position de repos, coupe le passage du fluide dans la deuxième tuyauterie et, dans une position de travail, autorise le passage du fluide depuis le premier accumulateur vers la deuxième extrémité des deuxième et première tuyauteries, une unité de commande séquentielle reliée aux trois valves pilotées pour actionner successivement, dans l'ordre, la première, la deuxième et la troisième valve pilotée dans leur position de travail et pour les ramener ensuite dans leur position de repos, et un dispositif de commande relié à l'unité de commande séquentielle pour démarrer une séquence de fonctionnement des valves pilotées.
- D'autres caractéristiques et les avantages de la présente invention ressortiront au cours de la description qui va suivre d'une forme d'exécution du dispositif d'alimentation de la présente invention, donnée en référence au dessins annexés sur lesquels :
- La figure 1 montre schématiquement les circuits hydrauliques du dispositif d'alimentation conforme à la présente invention.
- La figure 2 montre une variante de branchement de l'une des valves pilotées du dispositif d'alimentation de la figure 1.
- La figure 3 montre une variante de branchement d'une autre valve pilotée du dispositif d'alimentation de la figure 1.
- La figure 4 représente le schéma de l'unité de commande séquentielle associée au dispositif d'alimentation de la figure 1.
- La figure 5 est un diagramme illustrant le fonctionnement de l'unité de commande séquentielle de la figure 4.
- La figure 6 est un diagramme temps/pression, montrant comment la pression dans le vérin et la pression dans l'accumulateur du dispositif d'alimentation de la figure 1 évoluent en cours de fonctionnement avec le dispositif d'alimentation de la présente invention.
- La figure 7 représente, schématiquement, une pelle hydraulique, équipée d'un godet travaillant en rétro, et dans laquelle est incorporé le dispositif d'alimentation de là présente invention.
- La figure 8 est une vue partielle de la pelle hydraulique de la figure 7, équipée d'un godet travaillant en butte ou en chargeur.
- Le dispositif d'alimentation représenté sur la figure 1 comprend de façon connue, une pompe 1, un réservoir 2 de fluide hydraulique , un distributeur principal 3 et deux tuyauteries.4 et 5 raccordées respectivement aux deux chambres de pression 6 et 7 du cylindre d'un vérin à double effet 8 (une seule des deux tuyauteries 4 et 5 serait prévue dans le cas d'un.vérin à simple effet). Dans la figure 1, le distributeur principal 3 est représenté dans une position neutre, dans laquelle le fluide aspiré par la pompe 1 dans le réservoir 2 est refoulé à nouveau vers le réservoir. Quand le distributeur principal 3 est placé dans l'une ou l'autre de ses deux positions de travail, le fluide aspiré par la pompe 1 est refoulé à travers la tuyauterie 4 vers la chambre 6 ou à travers la tuyauterie 5 vers la chambre 7, selon la position de travail du distributeur principal, celle des deux chambres 6 et 7 qui n'est pas alimentée en fluide sous pression étant reliée à travers la tuyauterie 4 ou 5 au réservoir.
- Dans la suite du présente texte, on supposera que le vérin hydraulique 8 est destiné à travailler à la poussée. Le dispositif d'alimentation de la présente invention comprend en outre un bloc hydraulique 9 qui, dans le cas envisagé ci-dessus, est inséré dans la tuyauterie 4 entre le distributeur principal 3 et la chambre 6 du vérin 8. Le bloc hydraulique 9 comprend une première valve pilotée 10, qui est insérée dans la tuyauterie 4 et qui, dans sa position de repos montrée sur la figure 1, laisse passer le fluide hydraulique à travers la tuyauterie 4 et, dans sa position de travail, établit une communication entre la tuyauterie 4 et le réservoir 2. Le bloc hydraulique 9 comporte une deuxième valve pilotée 11 qui est aussi insérée dans la tuyauterie 4, entre la valve pilotée 10 et la chambre 6 du vérin 8, et qui, dans sa position de repos montrée sur la figure 1, autorise le passage du fluide dans la tuyauterie 4 et, dans sa position de travail, coupe ledit passage.
- Le bloc hydraulique 9 comporte en outre une tuyauterie 12, dont l'une des extrémités est raccordée à la tuyauterie 4 entre le distributeur principal 3 et la deuxième valve pilotée 11, par exemple entre le distributeur principal 3 et la première valve pilotée 10 comme montré sur la figure 1, et dont l'autre extrémité est raccordée à la tuyauterie 4 entre la seconde valve pilotée 11 et la chambre 6 du vérin 8. Dans la tuyauterie 12 sont insérés en série, depuis la première extrémité vers la deuxième extrémité de la tuyauterie 12, une valve unidirectionnelle 13, un accumulateur 14 et une troisième valve pilotée 15. La valve unidirectionnelle 13 est branchée de manière à permettre le passage du fluide hydraulique uniquement depuis le distributeur principal 3 vers l'accumulateur 14. Dans sa position de repos montrée sur la figure 1, la valve pilotée 15 coupe le passage du fluide dans la tuyauterie 12, tandis que dans sa position de travail, elle autorise le passage du fluide depuis l'accumulateur 14 vers la chambre 6 du vérin 8. Comme montré dans la figure 1, un ajutage réglable 16 peut être inséré dans la tuyauterie 12'en aval de la valve pilotée 15 pour régler le débit du fluide hydraulique vers la chambre 6 du vérin 8 quand la valve pilotée 15 est dans sa position de travail.
- Les valves pilotées 10, 11 et 15 peuvent être actionnées par une unité de commande séquentielle 17, qui va maintenant être décrite en faisant référence à la figure 4. Dans la suite du présent texte, on supposera que les trois valves pilotées 10, 11 et 15 sont des électro-valves pouvant être actionnées par des bobines d'excitation ou solénoïdes Sa, Sb et Sc, respectivement. Dans la figure 4, le numéro 18 désigne une source d'alimentation en courant, par exemple une batterie de 12 V ou 24 V, et le numéro 19 désigne un disjoncteur qui, lorsqu'il est enclenché, relie deux conducteurs d'alimentation 20 et 21 respectivement aux bornes de la source de courant 18. L'unité de commande séquentielle 17 comprend un premier relais Re ayant un contact R normalement ouvert, un deuxième et un troisième relais M1 et M2 ayant tous les deux un contact, respectivement M1T et M2T, normalement ouvert et temporisé à la fermeture, et un quatrième relais M3 ayant un contact M3T normalement fermé et temporisé à l'ouverture. La durée de la temporisation du' troisième relais M2 est légèrement plus grande que celle du deuxième relais M1 comme on le verra plus loin. Une première extrémité des bobines d'excitation Re, M1, M2' M3' Sa, Sb et Sc est connectée au conducteur d'alimentation 20. L'autre extrémité des bobines d'excitation Re, M1, M2, Sa et Sb, cette dernière à travers le contact normalement ouvert M1T, est connectée au conducteur d'alimentation 21, d'une part, à travers l'un ou l'autre de deux contacts normalement ouverts BP et PR connectés en parallèle et, d'autre part, à travers le contact normalement ouvert R et le contact normalement fermé M3T connectés en série. L'autre extrémité des bobines d'excitation.M3 et Sc est connectée au point de jonction 22 entre le contact normalement ouvert R et le contact normalement fermé M 3T à travers le contact normalement ouvert M2T.
- Le contact BP est un contact à bouton poussoir. Il permet de commander manuellement le démarrage d'une séquence de fonctionnement des électro-valves 10, 11 et 15, sous réserve que la pression dans la chambre 6 du vérin 8 et dans l'accumulateur 14 a atteint une valeur suffisante, ce qui peut être contrôlé au moyen de l'un ou l'autre des deux manomètres 23 et 24 reliés aux tuyauteries 4 et 12, respectivement (figure 1). Le contact PR est le contact d'un pressostat 25, qui permet de commander automatiquement le démarrage d'une séquence de fonctionnement des électro- valves 10, 11 et 15 chaque fois que la pression dans la chambre 6 du vérin 8 et dans l'accumulateur 14 atteint le seuil de déclenchement du pressostat 25. Le seuil de déclenchement du pressostat 25 peut être par exemple réglé à la pression maximale que peut fournir la pompe 1, ou à une valeur légèrement inférieure à la pression maximale. Le'pressostat 25 est relié, du point de vue hydraulique, à la tuyauterie 4 entre le distributeur principal 3 et l'électro-valve 11.
- Bien entendu, si on désire commander uniquement manuellement ou uniquement automatiquement le démarrage d'une séquence de fonctionnement des électro-valves 10, 11 et 15, l'un ou l'autre des deux contacts BP et PR peut être omis selon le cas.
- On décrira maintenant le fonctionnement du dispositif d'alimentation de la présente invention en faisant référence aux figures 1, 4 et 5. Pour fixer les idées, on supposera que le seuil de déclenchement du pressostat 25 est réglé à une pression de 300 bars, et que l'accumulateur 14 est un accumulateur à membrane, gonflé à l'azote à une pression de 100 bars (bien entendu, d' autres types d'accumulateur sont utilisables, par exemple des accumulateurs dans lesquels l'élément actif, membrane ou piston, est précontraint par un ressort taré). Dans ces conditions, lorsque les électrovalves 10, 11 et 15 sont dans leur position de repos montrée sur la figure 1 et lorsque le distributeur principal 3 est dans une position telle que la chambre 6 du vérin est alimentée en fluide sous pression à travers la tuyauterie 4 et à travers les électro-valves 10 et 11, le piston 26 du vérin 8 et sa tige du piston 27 sont déplacés vers l'extérieur en un mouvement continu. Si la tige de piston 27 rencontre une résistance importante à un moment quelconque au cours de son déplacement, la pression du fluide s'élève dans la chambre 6 du vérin et dans la tuyauterie 4. Dès que la pression dépasse 100 bars, l'accumulateur 14 commence à se charger à travers la valve unidirectionnelle 13 et à emmagasiner de l'énergie par le déplacement de sa membrane. Si, du fait de l'augmentation de la pression, le vérin réussit à vaincre la résistance qui lui est opposée, le système se remet alors à fonctionner normalement. Par contre, si le vérin n'arrive pas à vaincre la résistance qui lui est opposée, la pression dans la chambre 6 et dans la tuyauterie 4 continue à augmenter et l'accumulateur 14 continue à emmagasiner de l'énérgie jusqu'à ce que la pression atteigne le seuil de déclenchement du pressostat 25, par exemple 300 bars. A ce moment, le contact normalement ouvert PR se ferme, ce qui est représenté par l'état haut dans la figure 5 (dans cette figure, l'état fermé des contacts et l'état excité des bobines est représenté par 1' état haut, tandis que l'état ouvert des contacts et l'état désexcité des bobines est représenté par l'état bas). La fermeture du contact PR provoque l'excitation du relais Re qui ferme son contact R, et aussi l'excitation des relais M1 et M2 et de la bobine Sa de l'électrovalve 10. Toutefois, à ce moment, le relais M3 et les bobines Sb et Sc des électrovalves 11 et 15 ne sont pas excités puisque les contacts M1T et M2T des relais M1 et M2 sont temporisés à la fermeture.
- L'excitation de la bobine Sa fait passer 1' électro-valve 10 dans sa position de travail. Il en résulte que la tuyauterie 4 est maintenant reliée au reservoir 2. Par suite, la pression dans la tuyauterie 4 et dans la chambre 6 du vérin chute rapidement à zéro, la valve unidirectionnelle 13 se ferme et le contact PR du pressostat 25 s'ouvre à nouveau. L'ouverture du contact PR n'a aucun effet puisque, à ce moment, le contact R est fermé et maitient l'excitation des relais Re, M1 et M2 et de la bobine Sa.
- Au bout d'un temps t (figure 5), par exemple de 0,5s, correspondant à la temporisation du relais M1, le contact M1T se ferme, ce qui a pour effet exciter la bobine Sb de l'électro-valve 11 qui est alors commutée dans sa position de travail. Il en résulte que la chambre 6 du vérin 8 cesse d'être reliée au réservoir.
- Au bout d'un temps t2 (figure 5) qui correspond à la temporisation du relais M2 et qui est légèrement plus grand que le temps tl, par exemple 0,7s, le contact M2T se ferme, ce qui a pour effet d'exciter le relais M3 et la bobine Sc de l'électro-valve 15. Cette dernière est alors commutée dans sa position de travail et, par suite, l'accumulateur 14 est relié à la chambre 6 du vérin 8 et envoie à ce dernier une impulsion de fluide hydraulique. De préférence, la longueur de la tuyauterie 12 et de la tuyauterie 4 entre l'accumulateur 14 et le vérin 8 est la plus courte possible pour que l'impulsion de fluide hydraulique soit transmise à la chambre 6 dans le temps le faible possible. Comme l'impulsion hydraulique est envoyée dans un bref intervalle de temps dans la chambre 6 du vérin 8, il en résulte que le piston 26 reçoit un choc hydraulique de forte puissance qui contribue à vaincre la résistance opposée au déplacement de la tige de piston 27. On notera que, pendant que la tuyauterie 4 et la chambre 6 étaient reliées au réservoir 2, le piston 26 du vérin 8 avait légèrement reculé par suite de la résistance opposée au déplacement de la tige de piston 27. Il en résulte que, lorsque l'impulsion hydraulique est envoyée dans la chambre 6, le piston 26 est à nouveau déplacé vers l'extérieur et son énergie cinétique s'ajoute à l'énergie du choc hydraulique pour vaincre la résistance opposée au déplacement de la tige de piston 27. Afin de profiter encore plus de l'énergie cinétique du piston 26 pendant la durée du choc hydraulique, il est aussi possible de faire reculer encore plus le piston 26 pendant que la chambre 6 et la tuyauterie 4 sont reliées au réservoir à travers l'électro-valve 10 et avant que l'impulsion hydraulique soit envoyée à la chambre 6 à travers l'électro-valve 15. Ceci peut être par exemple obtenu en alimentant momentanément la chambre 7 du vérin 8 en fluide sous pression à l'aide d'une électro-valve supplémentaire convenablement disposée entre la pompe 1 et la tuyauterie 5.
- Au bout du temps t3 (figure 5), par exemple de 0,5s, correspondant à la temporisation du relais M3, le contact M - s'ouvre, ce qui a pour effet de désexciter tous les relais Re, M1, M2 et M3' et les bobines Sa, Sb, Sc des électro-valves 10, 11 et 15. Il en résulte que, l'unité de commande séquentielle 17 est remise à l'état initial.
- Si la résistance qui s'opposait au déplacement de la tige de piston 27 du vérin 8 a été vaincue, la pression dans la chambre 6 du vérin retombe et la tige de piston reprend son mouvement continu jusqu'à ce qu'elle rencontre à nouveau une forte résistance. Par contre, si la résistance qui s'opposait au déplacement de la tige de piston 27 n'a pas été vaincue par le premier choc hydraulique appliqué au piston 26, la pression dans la chambre 6 du vérin s'élève à nouveau rapidement et, simultanément, l' accumulateur 14 emmagasine à nouveau de l'énergie, jusqu'à ce que la pression atteigne le seuil de déclenchement du pressostat 25 ( 300 bars), provoquant ainsi une deuxième séquence de fonctionnement des électro-valves 10, 11 et 15 et, par suite, un second choc hydraulique sur le piston 26 du vérin. La séquence de fonctionnement des électro-valves 10, 11 et 15 se répète ainsi et une succession de chocs hydrauliques sont appliquées au piston 26 du vérin tant que la résistance qui s'oppose au déplacement de sa tige du piston 27 n'a pas été vaincue, après quoi la tige de piston 27 reprend son mouvement continu jusqu'à ce qu'elle rencontre à nouveau une forte résistance.
- Dans ce qui précède, on a supposé que chaque séquence de fonctionnement des électro-valves 10, 11 et 15 est démarrée automatiquement par le pressostat 25. Toutefois, dans le cas où le bouton poussoir BP est prévu, en appuyant une ou plusieurs fois sur le bouton poussoir BP, l'opérateur peut démarrer manuellement une ou plusieurs séquences de fonctionnement des électro- valves lorsqu'il constate qu'une forte résistance s'oppose au déplacement de la tige de piston 27 ou lorsqu'il constate que la pression lue sur l'un ou l'autre des manomètres 23 et 24 a dépasser la pression de gonflage de l'azote dans l'accumulateur 14 ( 100 bars dans l'exemple considéré ici).
- Dans le graphique de la figure 6, la courbe A en trait plein représente la variation dans le temps de la pression du fluide hydraulique dans l'accumulateur 14, tandis que la courbe B en trait mixte représente la variation dans le temps de la pression dans la chambre 6 du vérin 8 au cours d'un exemple typique de fonctionnement. Dans la partie gauche du graphique de la figure 6, on a représenté le cas où un seul choc hydraulique C suffit pour vaincre la résistance qui s'oppose au déplacement de la tige de piston 27, tandis que dans la partie médiane du même graphique on a représenté le cas où trois chocs hydrauliques successifs C1. C2 et C3 sont nécessaires pour vaincre la résistance qui s'oppose au déplacement de la tige de piston 27. Dans le graphique de la figure 6, la ligne horizontale inférieure H représente la pression de gonflage de l'azote dans l'accumulateur 14, la ligne horizontale supérieure H2 représente la pression maximale que peut fournir la pompe 1 et aussi le seuil de déclenchement du pressostat 25, et la zone entre les deux lignes H1 et H2 représente la plage de travail de l'accumulateur 14. Si on désire travailler dans une plage plus large ou plus étroite que celle représentée sur la figure 6, on peut bien entendu régler la pression de gonflage de l'azote dans l'accumulateur 14. Toutefois, il est plus rationnel d'utiliser un ou plusieurs autres accumulateurs, comme l'accumulateur 29 montré dans la figure 1, le ou les autres accumulateurs additionnels ayant une membrane qui est précontrainte à une pression différente de celle de la membrane de l'accumulateur 14. Dans ce cas, des robinets 30 et 31 sont prévus pour mettre sélectivement l'accumulateur 14 ou l'accumulateur 29 en communication avec la tuyautrie 12, tandis que les robinets 32 et 33 sont prévus pour mettre l'accumulateur non-utilisé 14 ou 29 en communication avec le réservoir 2.
- Si on le désire, les temporisations des relais M1, M2 et M3 peuvent être réglées par exemple au moyen de boutons de réglage 34, 35 et 36, respectivement, accessibles sur une face du boîtier de l'unité séquentielle de commande 17 (figure 1).
- Dans la forme d'exécution du bloc hydraulique 9 représenté sur la figure 1, on a supposé que la valve pilotée 10 était insérée dans la tuyauterie 4. Toutefois, la valve pilotée 10 peut être insérée dans une tuyauterie 37 branchée en dérivation sur la tuyauterie 4 comme montré sur la figure 2: Dans ce cas, le fonctionnement serait exactement le même que celui qui a été décrit plus haut.
- En outre, dans le bloc hydraulique 9 représenté sur la figure 1, lorsque la valve pilotée 11 est dans sa position de repos, le fluide hydraulique circule de gauche à droite à travers cette valve lorsque la chambre 6 du vérin est normalement alimentée en fluide sous pression (valve pilotée 10 dans sa position de repos), tandis que le fluide hydraulique circule de droite à gauche à travers la valve pilotée 11 lorsque la chambre 6 est reliée au réservoir 2 à travers la valve pilotée 10 dans sa position de travail. Avec certains modèles de valves pilotées, il est souhaitable que le fluide hydraulique circule toujours dans le même sens à travers la valve pilotée. Dans ce cas, la valve pilotée 11 peut être branchée, du point de vue hydraulique, comme montré sur la figure 3. Plus précisément, quatre valves unidirectionnelles 38, 39, 40 et 41, montées en pont de Wheatstone, sont insérées dans la tuyauterie 4, celle-ci étant reliée aux extrémités d'une diagonale du pont, la valve pilotée 11 étant montée dans l'autre diagonale du pont. Dans ces conditions, lorsque la chambre. 6 du vérin 8 est alimentée en fluide sous pression, le fluide circule successivement à travers la partie supérieure de la tuyauterie 4, la valve unidirectionnelle 38, la valve pilotée 11, la valve unidirectionnelle 39 et la partie inférieure de la tuyauterie 4. Par contre, quand la chambre 6 du vérin 8 est reliée au réservoir 2, le fluide hydraulique circule successivement à travers la partie inférieure de la tuyauterie 4, la valve unidirectionnelle 40, la valve pilotée 11, la valve unidirectionnelle 41 et la partie supérieure de la tuyauterie 4. Dans les deux cas, le fluide hydraulique traverse donc la valve pilotée 11 dans le même sens.
- La présente invention trouve une application dans de nombreux domaines de la technique. A titre d'exemples, on citera le travail des métaux (presses pour filage, étirage, emboutissage, estampage) et le travail des sols et des roches (pelles hydrau- ligues travaillant en rétro ou en chargeuse, tracteur de génie civil ou agricole travaillant en rippage, etc.) et, d'une façon générale, dans tous les cas où un vérin hydraulique travaillant normalement en continu doit pouvoir fournir un effort dynamique momentané, en un point quelconque de sa course, pour surmonter un accroissement de résistance au cours du déplacement de sa tige de piston.
- A titre d'exemple, on a représenté sur la figure 7 une pelle hydraulique 42 comportant, de façon connue, une flèche 43, qui est montée pivotante à son extrémité arrière sur le châssis et qui peut être actionnée par un vérin 45, un balancier 46, qui est monté pivotant à son extrémité arrière sur l'extrémité avant de la flèche 43 et qui peut être actionné par un vérin 47, et un godet 48, muni de dents défonceuses 49, qui est monté pivotant en rétro à l'extrémité avant du balancier 46 et qui peut être actionné par un vérin tel que le vérin 8 de la figure 1, par l'intermédiaire d'un palonnier 50 et d'une biellette 51. Le vérin 8 est porté par le balancier 46 sur lequel sont également disposés le bloc hydraulique 9 et l'accumulateur 14 de la figure 1. Sur la figure 8, on a représenté la partie avant de la pelle hydraulique 42 de la figure 7, avec un balancier 46 équipé d'un godet 48 monté en chargeur.
- Il va de soi que la forme d'exécution de la présente invention qui a été décrite ci-dessus- a été donnée à titre d'exemple purement indicatif et nullement limitatif, et que de nombreuses modifications peuvent être facilement apportées par l'homme de l'art sans pouvant ressortir du cadre de la présente invention. C'est ainsi notamment que la valve unidirectionnelle 13 (figure 1) peut être remplacée par une valve pilotée identique à la valve pilotée 11 et qui, dans une position de repos, autorise le passage du fluide hydraulique à travers la truyauterie 12 vers l'accumulateur 14 ou 29 et, dans une position de travail, coupe ledit passage. Dans ce cas, l'unité séquencielle de commande 17 doit actionner la valve pilotée 13 en même temps que la valve pilotée 10. En outre, lorsque les valves pilotées 10, 11, 15 et éventuellement 13 sont réalisées sous la forme d'électro-valves, l'unité séquentielle de commande 17 peut être réalisée sous forme de circuits électroniques à transistors ou à circuits intégrés. En outre, au lieu d'utiliser des électro-valves, on peut utiliser des valves pilotées par air comprimé ou par un fluide hydraulique. Dans ce dernier cas, l'unité séquentielle de commande 17 peut être elle-même constituée par des commutateurs et des circuits à retard fonctionnant à l'air comprimé ou avec un fluide hydraulique sous pression. En outre, dans ce qui précède, on a supposé que le vérin 8 travaille principalement à la poussée. S'il travaille principalement à la traction, il suffit de raccorder la tuyauterie 5 à la chambre 6 et la tuyauterie 4 à la chambre 7. Si le vérin 8 travaille aussi bien à la poussée qu'à la traction et si des impulsions hydrauliques doivent pouvoir être envoyées aussi'bien dans la chambre 6 que dans la chambre 7, il suffit d'insérer dans la tuyauterie 5 un deuxième bloc hydraulique identique au bloc hydraulique 9 de la figure 1 ou, plus simplement, de disposer une valve inverseuse dans les tuyauteries 4 et 5 entre le bloc hydraulique 9 et le vérin 8.
Claims (10)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| AT84402194T ATE31786T1 (de) | 1983-11-02 | 1984-10-31 | Kontinuierliche und kontrolliert pulsierende zufuehrung von druckfluessigkeit zu einem hydraulikzylinder. |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR8317382 | 1983-11-02 | ||
| FR8317382A FR2554179B1 (fr) | 1983-11-02 | 1983-11-02 | Procede pour alimenter en fluide hydraulique, en continu et par impulsion controlee, un verin hydraulique travaillant normalement en continu, et dispositif pour la mise en oeuvre du procede |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP0147256A1 true EP0147256A1 (fr) | 1985-07-03 |
| EP0147256B1 EP0147256B1 (fr) | 1988-01-07 |
Family
ID=9293700
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP84402194A Expired EP0147256B1 (fr) | 1983-11-02 | 1984-10-31 | Alimentation d'un verin en fluide hydraulique en continu et par impulsion controlée |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US4590763A (fr) |
| EP (1) | EP0147256B1 (fr) |
| JP (1) | JPS60172706A (fr) |
| AT (1) | ATE31786T1 (fr) |
| CA (1) | CA1246497A (fr) |
| DE (1) | DE3468491D1 (fr) |
| ES (1) | ES8603218A1 (fr) |
| FR (1) | FR2554179B1 (fr) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115370626A (zh) * | 2022-08-16 | 2022-11-22 | 中煤科工集团重庆研究院有限公司 | 液压马达低速步进式旋转控制方法 |
| CN115405578A (zh) * | 2022-08-16 | 2022-11-29 | 中煤科工集团重庆研究院有限公司 | 一种液压马达微角度步进控制方法 |
Families Citing this family (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE3328426A1 (de) * | 1983-08-06 | 1985-02-21 | Achim 8070 Ingolstadt Graul | Arbeitswerkzeug fuer erdbwegungsgeraete |
| JPS62119490U (fr) * | 1986-01-23 | 1987-07-29 | ||
| US5116188A (en) * | 1987-09-16 | 1992-05-26 | Kabushiki Kaisha Kobe Seiko Sho | Vibration suppressing device for wheeled construction equipment |
| DE3841369A1 (de) * | 1988-12-08 | 1990-06-21 | Kloeckner Humboldt Deutz Ag | Pulshydraulik |
| JPH04140503A (ja) * | 1990-10-02 | 1992-05-14 | Teisaku:Kk | 油圧シリンダのための脈動装置 |
| JP2964607B2 (ja) * | 1990-10-11 | 1999-10-18 | 日産自動車株式会社 | 油圧供給装置 |
| WO1993002880A1 (fr) * | 1991-08-07 | 1993-02-18 | Microhydraulics, Inc. | Systeme de suspension active |
| WO1993005244A1 (fr) * | 1991-09-04 | 1993-03-18 | O&K Orenstein & Koppel Ag | Systeme hydraulique amortisseur de vibrations pour engins de chantiers munis d'outils |
| US5878569A (en) * | 1996-10-21 | 1999-03-09 | Caterpillar Inc. | Energy conversion system |
| AU4047900A (en) * | 1999-04-06 | 2000-10-23 | Edwin E. Downer Jr | Energy conservation system for earth-moving loading machines |
| US6655136B2 (en) | 2001-12-21 | 2003-12-02 | Caterpillar Inc | System and method for accumulating hydraulic fluid |
| US6763661B2 (en) * | 2002-05-07 | 2004-07-20 | Husco International, Inc. | Apparatus and method for providing vibration to an appendage of a work vehicle |
| US20140283915A1 (en) * | 2013-03-21 | 2014-09-25 | Caterpillar Inc. | Hydraulic Control System Having Relief Flow Capture |
| GB2563238B (en) * | 2017-06-07 | 2021-04-28 | Caterpillar Sarl | Fluid delivery system |
| US11493060B2 (en) | 2019-06-04 | 2022-11-08 | Industries Mailhot Inc. | Hydraulic powering system and method of operating a hydraulic powering system |
| CN113090596B (zh) * | 2021-03-15 | 2022-09-16 | 中国科学院工程热物理研究所 | 一种具有热冗余备份供油的油动机系统及其控制方法 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE886121C (de) * | 1951-05-07 | 1953-08-10 | Fredenhagen Kommanditgesellsch | Aufnahmeschaufel fuer Foerdergut fuer intermittierenden Betrieb |
| FR2243357A1 (en) * | 1974-04-18 | 1975-04-04 | Poclain Sa | Control device for body with reciprocating motion - electro-magnet and time relay control double acting ram distributor |
| GB2022714A (en) * | 1978-06-05 | 1979-12-19 | Nat Advanced Drilling Mach | Hydraulic control apparatus |
| FR2439079A1 (fr) * | 1978-10-16 | 1980-05-16 | Manceau Marcel | Unite autonome de gavage hydraulique par accumulateur d'une installation de commande par pompe d'une presse a injecter |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| NL261563A (fr) * | 1960-03-01 | |||
| JPS519865A (ja) * | 1974-07-15 | 1976-01-26 | Matsushita Electric Works Ltd | Choonpaparusuekooshikisuitsuchino godosaboshikairo |
-
1983
- 1983-11-02 FR FR8317382A patent/FR2554179B1/fr not_active Expired
-
1984
- 1984-10-31 AT AT84402194T patent/ATE31786T1/de active
- 1984-10-31 US US06/666,824 patent/US4590763A/en not_active Expired - Fee Related
- 1984-10-31 ES ES537627A patent/ES8603218A1/es not_active Expired
- 1984-10-31 EP EP84402194A patent/EP0147256B1/fr not_active Expired
- 1984-10-31 DE DE8484402194T patent/DE3468491D1/de not_active Expired
- 1984-10-31 CA CA000466720A patent/CA1246497A/fr not_active Expired
- 1984-11-01 JP JP59229047A patent/JPS60172706A/ja active Granted
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE886121C (de) * | 1951-05-07 | 1953-08-10 | Fredenhagen Kommanditgesellsch | Aufnahmeschaufel fuer Foerdergut fuer intermittierenden Betrieb |
| FR2243357A1 (en) * | 1974-04-18 | 1975-04-04 | Poclain Sa | Control device for body with reciprocating motion - electro-magnet and time relay control double acting ram distributor |
| GB2022714A (en) * | 1978-06-05 | 1979-12-19 | Nat Advanced Drilling Mach | Hydraulic control apparatus |
| FR2439079A1 (fr) * | 1978-10-16 | 1980-05-16 | Manceau Marcel | Unite autonome de gavage hydraulique par accumulateur d'une installation de commande par pompe d'une presse a injecter |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115370626A (zh) * | 2022-08-16 | 2022-11-22 | 中煤科工集团重庆研究院有限公司 | 液压马达低速步进式旋转控制方法 |
| CN115405578A (zh) * | 2022-08-16 | 2022-11-29 | 中煤科工集团重庆研究院有限公司 | 一种液压马达微角度步进控制方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| ES537627A0 (es) | 1986-01-01 |
| JPH0381011B2 (fr) | 1991-12-26 |
| DE3468491D1 (en) | 1988-02-11 |
| JPS60172706A (ja) | 1985-09-06 |
| US4590763A (en) | 1986-05-27 |
| CA1246497A (fr) | 1988-12-13 |
| ES8603218A1 (es) | 1986-01-01 |
| EP0147256B1 (fr) | 1988-01-07 |
| FR2554179B1 (fr) | 1986-01-03 |
| FR2554179A1 (fr) | 1985-05-03 |
| ATE31786T1 (de) | 1988-01-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP0147256B1 (fr) | Alimentation d'un verin en fluide hydraulique en continu et par impulsion controlée | |
| EP2788149B1 (fr) | Procédé de commutation de la course de frappe d'un piston de frappe d'un appareil à percussions | |
| EP0715932B1 (fr) | Procédé et appareil pour la régulation de la course de frappe d'un appareil à percussion mû par un fluide incompressible sous pression | |
| FR2539186A1 (fr) | Dispositif pour le reglage du nombre de tours d'un moteur diesel d'une pelle excavatrice hydraulique | |
| CH627522A5 (fr) | Appareil de foration hydraulique. | |
| FR2683867A1 (fr) | Circuit hydraulique pour le fonctionnement synchrone de deux verins double effet, notamment pour chargeuse pelleteuse. | |
| FR2563405A1 (fr) | Dispositif de relevage hydraulique pour machines de recolte, notamment pour moissonneuses-batteuses | |
| FR2873175A1 (fr) | Circuit hydraulique comprenant un selecteur multifonction | |
| FR2805550A1 (fr) | Unite de bourrage de ballast de voies de chemin de fer | |
| EP2928740B1 (fr) | Distributeur pneumatique de freinage pour véhicule ferroviaire | |
| EP2928741A2 (fr) | Distributeur pneumatique de freinage pour vehicule ferroviaire | |
| EP2845685B1 (fr) | Dispositif de détection de présence d'un outil amovible d'un actionneur linéaire | |
| FR2706951A1 (fr) | ||
| FR2621355A1 (fr) | Circuit de commande pour un releveur hydraulique actionne par une pompe a debit variable | |
| FR2689571A1 (fr) | Dispositif de pompage d'un liquide à plusieurs pistons. | |
| FR2970048A1 (fr) | Dispositif d'actionnement hydraulique | |
| FR3104180A1 (fr) | « Pelle mécanique, hydraulique à fonction de damage » | |
| FR2459096A1 (fr) | Machine a coulee sous pression | |
| FR2540534A1 (fr) | Dispositif de nivellement automatique | |
| FR2535151A1 (fr) | Dispositif hydraulique de regulation de relevage sur un tracteur agricole | |
| EP0694367B1 (fr) | Machine de sablage à commande à distance | |
| EP1697595A1 (fr) | Engin de travaux publics | |
| CH322408A (fr) | Mécanisme d'actionnement pour effectuer des mouvements d'un organe par rapport à un autre | |
| FR2932113A1 (fr) | Installation combinee de sciage et de fendage de billes de bois | |
| BE845912A (fr) | Machine a souder en bout par resistance avec etincelage |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Designated state(s): AT BE CH DE GB IT LI LU NL SE |
|
| 17P | Request for examination filed |
Effective date: 19850801 |
|
| 17Q | First examination report despatched |
Effective date: 19860716 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| ITF | It: translation for a ep patent filed | ||
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AT BE CH DE GB IT LI LU NL SE |
|
| REF | Corresponds to: |
Ref document number: 31786 Country of ref document: AT Date of ref document: 19880115 Kind code of ref document: T |
|
| REF | Corresponds to: |
Ref document number: 3468491 Country of ref document: DE Date of ref document: 19880211 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 19881031 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed | ||
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: SE Payment date: 19901022 Year of fee payment: 7 Ref country code: LU Payment date: 19901022 Year of fee payment: 7 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 19901023 Year of fee payment: 7 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: CH Payment date: 19901026 Year of fee payment: 7 |
|
| ITTA | It: last paid annual fee | ||
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: NL Payment date: 19901031 Year of fee payment: 7 Ref country code: DE Payment date: 19901031 Year of fee payment: 7 Ref country code: AT Payment date: 19901031 Year of fee payment: 7 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: BE Payment date: 19901102 Year of fee payment: 7 |
|
| EPTA | Lu: last paid annual fee | ||
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LI Effective date: 19911031 Ref country code: GB Effective date: 19911031 Ref country code: CH Effective date: 19911031 Ref country code: BE Effective date: 19911031 Ref country code: AT Effective date: 19911031 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Effective date: 19911101 |
|
| BERE | Be: lapsed |
Owner name: GTM-ENTREPOSE Effective date: 19911031 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Effective date: 19920501 |
|
| NLV4 | Nl: lapsed or anulled due to non-payment of the annual fee | ||
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee | ||
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Effective date: 19920701 |
|
| EUG | Se: european patent has lapsed |
Ref document number: 84402194.9 Effective date: 19920604 |