EP0781630A1 - Spannvorrichtung - Google Patents
Spannvorrichtung Download PDFInfo
- Publication number
- EP0781630A1 EP0781630A1 EP96112841A EP96112841A EP0781630A1 EP 0781630 A1 EP0781630 A1 EP 0781630A1 EP 96112841 A EP96112841 A EP 96112841A EP 96112841 A EP96112841 A EP 96112841A EP 0781630 A1 EP0781630 A1 EP 0781630A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- arm
- clamping
- tensioning
- clamping device
- base
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 239000004033 plastic Substances 0.000 claims abstract description 40
- 229920003023 plastic Polymers 0.000 claims abstract description 40
- 238000005452 bending Methods 0.000 claims description 25
- 239000000463 material Substances 0.000 claims description 11
- 238000005266 casting Methods 0.000 claims description 9
- 238000001514 detection method Methods 0.000 claims description 4
- 239000002991 molded plastic Substances 0.000 claims description 2
- 238000000465 moulding Methods 0.000 abstract 2
- 238000004519 manufacturing process Methods 0.000 description 8
- 238000013461 design Methods 0.000 description 7
- 238000005516 engineering process Methods 0.000 description 5
- 238000000034 method Methods 0.000 description 4
- 230000008569 process Effects 0.000 description 4
- 238000001746 injection moulding Methods 0.000 description 3
- 230000003993 interaction Effects 0.000 description 3
- 208000027418 Wounds and injury Diseases 0.000 description 2
- 238000010276 construction Methods 0.000 description 2
- 230000006378 damage Effects 0.000 description 2
- 208000014674 injury Diseases 0.000 description 2
- 239000004743 Polypropylene Substances 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 230000004913 activation Effects 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 230000018109 developmental process Effects 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 238000011156 evaluation Methods 0.000 description 1
- 239000012530 fluid Substances 0.000 description 1
- 238000007654 immersion Methods 0.000 description 1
- 230000035515 penetration Effects 0.000 description 1
- 229920000642 polymer Polymers 0.000 description 1
- -1 polypropylene Polymers 0.000 description 1
- 229920001155 polypropylene Polymers 0.000 description 1
- 230000003014 reinforcing effect Effects 0.000 description 1
- 238000007493 shaping process Methods 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 239000000243 solution Substances 0.000 description 1
- 230000006641 stabilisation Effects 0.000 description 1
- 238000011105 stabilization Methods 0.000 description 1
- 239000000725 suspension Substances 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
- 230000001960 triggered effect Effects 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
- 238000003466 welding Methods 0.000 description 1
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25B—TOOLS OR BENCH DEVICES NOT OTHERWISE PROVIDED FOR, FOR FASTENING, CONNECTING, DISENGAGING OR HOLDING
- B25B5/00—Clamps
- B25B5/16—Details, e.g. jaws, jaw attachments
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25B—TOOLS OR BENCH DEVICES NOT OTHERWISE PROVIDED FOR, FOR FASTENING, CONNECTING, DISENGAGING OR HOLDING
- B25B5/00—Clamps
- B25B5/06—Arrangements for positively actuating jaws
- B25B5/061—Arrangements for positively actuating jaws with fluid drive
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25B—TOOLS OR BENCH DEVICES NOT OTHERWISE PROVIDED FOR, FOR FASTENING, CONNECTING, DISENGAGING OR HOLDING
- B25B5/00—Clamps
- B25B5/06—Arrangements for positively actuating jaws
- B25B5/061—Arrangements for positively actuating jaws with fluid drive
- B25B5/064—Arrangements for positively actuating jaws with fluid drive with clamping means pivoting around an axis perpendicular to the pressing direction
Definitions
- the invention relates to a tensioning device, in particular for releasably tensioning objects against a base, with a base on which a tensioning arm projecting forwardly in a position of use is pivotably arranged over a first pivoting area and on which a position in the position of use is raised upwards over a second pivoting range projecting, in the crossover position reaching past the tensioning arm is pivotally arranged, a guide arm extending between the tensioning arm and a section arranged above the latter, which is pivotally connected to the tensioning arm via a third pivoting range and to the actuating arm via a thru axle.
- a tensioning device of this type emerges from the German utility model DE 78 38 562 U1. There, all swivel ranges are defined by thru axles consisting of separate axle bolts, over which the individual arms are pivotally mounted at the base and among themselves.
- a disadvantage of the known clamping device is the large number of separate components that require separate production and then have to be assembled in a complex work.
- the base, the three arms and the three pivoting areas are fixed components of a one-piece molded plastic body, the three pivoting areas being formed by bending sections in the form of band-like, flexible material regions of the plastic body, the bending flexibility of which is sufficiently large to allow for the To pivot the tensioning arm and the actuating arm from an uncrossed starting position immediately after the casting is made into the crossing position of use and fixed by the thru-axle.
- the clamping device has a one-piece plastic body, which can preferably be produced by injection molding, in which the three pivoting areas are formed by one-piece, flexible material areas of the plastic body.
- the shape is selected such that the clamping arm and the actuating arm assume an uncrossed, that is to say not overlapping, starting position relative to one another immediately after the casting production, which can be produced without problems by casting technology.
- the arms are then pivoted from the starting position into the intersecting position of use, which is fixed via the plug-in axis in the connection area between the actuating arm and the guide arm. Due to their band-like design, the bending sections are able to ensure both the pivoting mobility necessary for setting up the position of use and the pivoting mobility required during operation.
- the actuating arm is expediently divided into two spaced arm elements following the associated bending section, between which the tensioning arm extends so that they reach past it on both sides.
- a particularly advantageous embodiment for solving the underlying task provides that on the actuating arm a pivotable locking device is provided, which assumes a locking position in a clamping position of the clamping device, in which it engages over a stop device provided on the clamping arm and secures the clamping arm against swinging up .
- a pivotable locking device In the tensioned position, when the object is tensioned, there is expediently a latching connection between the locking device and the stop device, which prevents automatic release, but can easily be canceled by pivoting the actuating arm back.
- the interaction between the locking device and the stop device advantageously relieves the load on the guide arm transmitting the movement of the actuating arm to the swivel arm.
- the counter forces exerted on the tensioning arm by the object to be tensioned are essentially absorbed by the actuating arm due to the form-fitting interaction between the locking device and the stop device.
- the counterforce exerted by the tensioned object on the tensioning arm has the tendency to pivot the tensioning arm around the effective area between the locking device and the support device.
- a large part of the stress is absorbed by the interaction between the support section and the abutment section.
- an upwardly flexible, flexible securing arm is expediently formed in one piece, which forms part of the one-piece plastic body and has a securing projection which can engage behind an assigned securing part on the guide arm and / or actuating arm for releasably fixing an open position of the tensioning device, in which case there is expediently a releasable latching connection.
- a manual actuation lever is expediently provided on the actuating arm, which is preferably detachably connected.
- a pivotable retaining tab likewise belonging to the one-piece plastic body, on which a drive device can be fixed, the movable driven drive element of which acts on the actuating arm, in particular by means of the plug-in axis.
- the drive device can be partially connected in one piece to the retaining tab.
- the housing of the working cylinder could be integrally formed on the retaining tab and thus be part of the one-piece plastic body.
- the manual actuation lever and the drive device can be provided at the same time in order to enable an optional actuation.
- a covering hood which at least surrounds the plastic body and which has a recess in the region of the front through which the tensioning arm can reach without impairing its pivoting movements. If a drive device, in particular a fluid-operated device, is present, it is also expedient to place it under the cover.
- the tensioning device 1 is fastened to a carrier 2 in the ready-to-operate state and enables any object 3, regularly a workpiece, to be clamped against a base 4 formed, for example, by the carrier 2. This is done, for example, for the purpose of releasably securing the object 3 during the required welding work.
- the tensioning device can therefore be used advantageously in manufacturing and assembly technology.
- the tensioning device 1 has a base-like base 5 with fastening holes 6 for screwing onto the carrier 2.
- a bump-like elevation 7 projects upwards. It practically forms a bearing block for a tension arm 8 pivotably mounted on the base 5.
- This tension arm 8 is pivotally connected to the base 5 via a first pivot area 12, the connection area 13 advantageously being located in the upper area of the elevation 7.
- FIGS. 2 and 3 wherein FIG. 2 shows a clamping position and FIG. 3 shows an open position of the clamping device, the clamping arm 8 projects forward from the first swivel area 12. In the tensioned position according to FIG. 2, it runs essentially horizontally. In the open position according to FIG. 3, it projects upwards at the same time, so that there is an oblique position.
- an actuating arm 15 is pivotably arranged via a second pivoting area 14, the level of the pivoting movement coinciding with that of the tensioning arm 8 or being aligned parallel to it.
- the actuating arm 15 projects upwards from the base 5, being oriented essentially vertically in the tensioned position according to FIG. 2 and assuming a backward oblique position in the open position according to FIG.
- the tensioning arm 8 and the actuating arm 15 assume a cross-over position relative to one another.
- the actuating arm 15 reaches past the tension arm 8.
- the actuating arm 15 is divided into two laterally spaced arm elements 16, 16 ′ which run parallel to one another and define an intermediate space 19 which is penetrated by the tension arm 8 from behind.
- connection between the guide arm 18 and the tensioning arm 8 takes place by means of a third swivel range 22 a connection point 24 located between the first swivel area 12 and the front tensioning section 23 arranged at a distance from this.
- the guide arm 18 expediently projects essentially vertically upwards, it being possible for it to be arranged at least approximately parallel to the actuating arm 15. In favor of a compact design, it extends in the tensioned position according to FIG. 2 within the space 19 mentioned between the two arm elements 16, 16 '.
- the pivotable connection between the guide arm 18 and the actuating arm 15 is realized by means of a thru axle 25.
- it consists of a separate axle bolt 26 which is inserted through aligned bearing openings 27, 27 'of the actuating arm 15 and the guide arm 18.
- a driving force is exerted on the actuating arm 15 which has a component which is effective in the pivoting direction according to arrows 28, 28 '.
- the actuating arm 15 which consequently pivots about the second pivoting region 14 exerts a tensile or compressive force on the tensioning arm 8 via the guide arm 18 depending on the pivoting direction, so that this in turn exerts a pivoting movement about the first pivoting region 12, which is indicated by the double arrow 30 is.
- At least the base 5, the clamping arm 8, the actuating arm 15 and the guide arm 18 as well as the first, second and third pivoting areas 12, 14, 22 are solid, one-piece components of a plastic body, generally designated 32, which is expediently a casting produced by injection molding technology is.
- the components mentioned are thus combined in a single component in the form of the plastic body 32.
- the swivel areas 12, 14, 22, comparable to the film hinge technology, are formed by band-like, flexible material areas of the plastic body 32, which are referred to as bending sections 33. It is preferably a polymer plastic, and polypropylene plastic has proven to be particularly useful.
- the above-mentioned arms 8, 15, 18 are preferably resiliently suspended on the component carrying them via the elongated and relatively thin bending sections 33.
- the band-like design of the bending sections 33 ensures that the pivoting areas are not concentrated on a fixed pivot axis, but that the bending processes occurring during pivoting are distributed over a greater length of material, so that the bending stress on the material is reduced and a long service life can be expected .
- the bending sections 33 designed in this way simplify the production of the plastic body 32. In this connection, reference is made to FIGS. 4 to 6.
- the plastic body 32 according to the example is produced by injection molding of plastic.
- the underlying casting mold is designed so that the plastic body 32 immediately after casting production assumes the initial state shown in FIG. 4, in which the clamping arm 8 and the actuating arm 15 preceding it are in an uncrossed starting position. They assume a position in the longitudinal direction 31 of the plastic body 32, preferably in such a way that, starting from the base 5, they are directed obliquely forwards and at the same time upwards. There are no parts that move relative to each other during operation that cross or overlap.
- the guide arm 18 formed on the clamping arm 8 projects to the opposite direction to the actuating arm 15.
- the actuating arm 15 is pivoted back according to FIGS. 5 and 6 until the bearing openings 27, 27 'of the actuating arm 15 and the guide arm 18, which are shown slightly offset in FIG is.
- the actuating arm 15 and simultaneously pivoting the clamping arm 8 downward engages from above into the space 19 between the two arm elements 16, 16 '.
- an upwardly projecting retaining tab 34 is integrally formed in the area lying behind the three pivoting areas 12, 14, 22 and preferably at the rear end area of the base 5. It forms part of the one-piece plastic body 32.
- the connection to the base 5 is established via a fourth swivel area 35, which is defined in a comparable manner to the above-mentioned swivel areas by a flexible, band-like, thin bending section 33.
- the plate-like retaining tab 34 is able to perform a pivoting movement 36 around the fourth pivoting region 35 in the same pivoting plane as the various arms.
- the plane of the holding tab 34 extends transversely to the pivoting direction 36.
- a drive device 37 is fixed, which according to the example is formed by a pneumatically operated working cylinder 38. This is fastened with its housing to the holding bracket 34, its drive member 42, formed by a piston rod, passing through the holding bracket 34 and engaging with its front end on the actuating section 17 of the actuating arm 15.
- the drive member 42 is expediently fixed on the axle bolt 26 so as to be rotatable about its longitudinal axis.
- the guide arm 18 can have a recess 43 bridged by the latter in the region of the plug-in axle 25, into which the section of the drive member 42 penetrated by the axle bolt 26 projects.
- the working cylinder 38 is, for example, a double-acting working cylinder, so that axial movement of the drive member 42 in one direction or another can be triggered by controlled fluid application via two pressure medium lines 41 in a manner known per se, depending on whether the clamping device is to be closed or opened.
- the fourth swivel area 35 allows the drive device 37 to be automatically aligned as a function of the swivel position of the actuating section 17.
- the housing of the drive device 17 as an integral part of the plastic body 32 by being molded directly onto the retaining tab 34.
- a tensioning device 1 is only to be designed for manual operation, the retaining tab 34 according to FIG. 9 can be omitted.
- the actuating arm 15 is extended beyond the actuating section 17 in favor of an improved leverage, so that there is a handle 44 by means of which the actuating arm 15 can be pivoted back and forth with little effort.
- the handle 44 is expediently provided on a manual actuation lever 45, which is releasably attached to the actuating arm 15.
- the manual actuation lever 45 has two spaced U-like profiled holding arms 46, each of which has a positive fit sit one of the arm elements 16, 16 'and flank them on the outside.
- inwardly projecting locking projections 47 can be provided, which can snap into complementary locking recesses 48 of the arm elements 16, 16 '.
- the manual operating lever 45 can additionally be fixed via the axle bolt 26 if it projects beyond the operating arm 15 and plunges into an aligned opening 52 of the manual operating lever 45.
- the tensioning device can thus be designed for both manual and machine operation. There is also the possibility of providing a mixed manual and machine operation, as indicated in FIG. 7.
- a drive device 37 as well as a manual actuation lever 45, which is only indicated by dash-dotted lines, the manual actuation lever 45 being expediently releasably secured to the actuating arm, for example by plugging it on. It is now possible to carry out the clamping process manually using the manual operating lever for complicated clamping tasks, while the subsequent loosening can be done mechanically using the drive device 37. A reverse mode of operation - mechanical clamping, manual loosening - would of course also be possible.
- the tensioning device 1 can be equipped with a securing device 53, which enables the tensioning arm 8 to be locked in the maximum open position 58 indicated by dash-dotted lines in FIG.
- the securing device of the exemplary embodiment has a securing arm 54 arranged behind the swivel arm 8 and preferably following the elevation 7, which protrudes upward. It is an integral part of the plastic body 32 and has a material thickness that gives it a bending elasticity, so that it is elastically bendable back and forth in the pivoting plane of the other arms. For example, it extends from the base 5 upwards and at the same time to the front, so that it assumes an inclined position.
- the securing arm 54 has at least one securing projection 55 projecting forward.
- a securing projection 55 is formed on each of these arm parts 56.
- the actuating section 17 shifts backward approximately at the same time as an arrow 28 and at the same time downwards to the base 5.
- a securing section 57 arranged in the area of the actuating section 17 reaches a securing position indicated by dash-dotted lines at 59 in FIG the securing projection 55.
- the securing section 57 briefly presses the securing projection 55 back, which is made possible by the bending elasticity of the securing arm 54. Then the securing projection 55 snaps over the securing section 57 and thus fixes the maximum open position.
- the securing part 57 could be arranged on the actuating arm 15. According to the example, however, it is located in an advantageous embodiment on the end region of the guide arm 18 through which the plug-in axis 25 passes and is formed by two cam-like elevations 62 on the two parts of the guide arm 18 flanking the recess 43.
- the securing device 53 is designed such that the latching connection can be released automatically by the driving force exerted on the actuating arm 15 according to arrow 28 '. This can be achieved without problems by appropriate shaping of the securing projection 55 and the securing section 57 interacting with it.
- the various swivel ranges are made relatively thin. This also applies to the third pivoting area 22 in the transition area between the guide arm 18 and the tensioning arm 8.
- the guide arm 18 is therefore only suitable to a limited extent for transmitting the tensioning force required for tensioning to the tensioning arm 8, with which it acts on the object 3 to be tensioned .
- this force is applied by means of a bolt-like clamping part 60 (not shown in FIGS. 3 to 6) fixed to the clamping section 23, which has a clamping head 63 on the underside which rests on the object 3 to be clamped.
- the clamping part 60 is arranged on the clamping arm 8 in an adjustable manner, it can differ Shapes of the objects to be exciting 3 are taken into account.
- a locking device 64 which can be pivoted together with the latter is provided on the actuating arm 15, which in the clamping position of the clamping device assumes the locking position shown in FIGS. 1 and 2, in which it engages over a stop device 65 provided on the clamping arm 8 and thereby presses the tension arm down and at the same time secures it against swinging up in the direction of the open position.
- the stop device 65 sits axially between the first swivel area 12 and the tensioning section 23 of the tensioning arm 8. Because of the extremely flexible suspension of the tensioning arm 8 achieved via the relatively long bending section 33 on the first swivel area 12, the tensioning arm 8 has a tendency to move between the connection area 13 and the Stop device 65 lying arm section due to the leverage down. However, the clamping force in the area of the clamping section 23 was reduced. For this reason, a support section 66, which is expediently formed by a material projection and protrudes downward, is provided in the intermediate region mentioned below on the tensioning arm 8.
- an abutment section 67 formed on the base 5, in particular in the front region of the bump-like elevation 7, which is also expediently designed in the manner of a projection and projects upwards.
- the arrangement, alignment and design of the two parts 66, 67 is selected so that the pivoting movement of the Arm 8 is not hindered at any time.
- the support section 66 swivels in above the abutment section 67 and is therefore directly opposite it.
- the support section 66 is pressed against the abutment section 67 due to the lever action that occurs and is secured by the latter against immersion. This results in a support or stabilization of the bending section 33 lying between the stop device 65 and the connection area 13 to the bump-like elevation 7, so that high tension forces can be transmitted regardless of the high bending flexibility present in the area of the swivel areas.
- the stop device 65 is formed by stop projections 68 arranged on both sides of the clamping arm 8.
- the locking device 64 comprises two locking projections 71, each associated with one of the stop projections 68, each of which is integrally formed on the forward-facing longitudinal side of one of the two arm elements 16, 16 'and projects forward.
- Its locking surface 72 which faces the stop projections 68 in the tensioned position, has an angled course and, viewed in the tensioned position, initially extends essentially horizontally to the front, in order to then fall obliquely downward over a corner region 73.
- An edge 74 of the associated support projection 68 lies opposite the corner region 73 in the clamping position.
- the associated locking projections 71 are, for example, angled like hooks.
- the stop device 65 lies in the swivel path of the actuating arm 15, it preferably also serves as a device for limiting its swivel path or for specifying its position assumed in the tensioned position.
- this can be provided, if necessary, with at least one integrally molded reinforcing rib 84, which extends in particular in the longitudinal direction on its upper side.
- at least one integrally molded reinforcing rib 84 which extends in particular in the longitudinal direction on its upper side.
- Such an embodiment is indicated by dash-dotted lines in FIG. 8, two stiffening ribs 84 running in the region of the lateral edges of the tensioning arm being provided.
- the tensioning device preferably has a detection device for detecting certain operating positions, which is indicated by dash-dotted lines in FIG. 3 at 85. It serves, for example, to record the clamping position and an open position. This makes it possible, depending on each position to perform further, dependent operations.
- the detection device 85 comprises two switches 86, 87, which are preferably fixed to the base 5 and each have a movable switching element 88, 88 '.
- switches 86, 87 On one of the arms, for example on the actuating arm 15, two actuating parts 89, 89 'are arranged in such a way that they take part in the pivoting movement of the actuating arm 15, the switches 86, 87 being arranged such that one of the switching elements 88, 88' in each Displacement of each one actuation section 89, 89 '.
- one actuating part 89 ' acts on the switching element 88' of the one switch 87, which results in a signal from which the current position can be inferred.
- the other switch 86 In the closed position, the other switch 86 is actuated accordingly via the other actuating part 89, the first-mentioned switch 87 then being deactivated. In this way, a signal can be generated which indicates that the clamping position has been taken
- the switches are connected via lines, not shown, to an evaluation device, also not shown, in which the signals are processed, for example to enable a visual display of the current position or the activation of other devices.
- an evaluation device also not shown, in which the signals are processed, for example to enable a visual display of the current position or the activation of other devices.
- switches are fundamentally arbitrary, as is the number of operating parts.
- the switches can be any sensor elements, for example sensors that operate without contact.
- the cover hood 75 has an essentially cuboid outer shape, only the plastic body 32 being accommodated in a protected manner, while the drive device 37 protrudes from the rear.
- the cover 76 according to FIG. 8 has a greater overall length, so that not only the plastic body 32 but also the drive device 37 arranged thereon disappears under the cover 76.
- the cover 75, 76 is expediently releasably attached to the plastic body 32, preferably in the area of the base 5.
- a releasable snap-in connection is used.
- a possible embodiment of a suitable snap-in connection device 81 is indicated in FIG.
- recesses 82 are provided on the cover hood 76 in the front and in the rear area, in particular at the level of the base 5, into the resilient locking projections provided on the plastic body 32 and in particular on the base 5 83 can intervene, or vice versa.
- FIG. 8 also makes it clear that the base 5 can be extended backwards beyond the retaining tab 34 (plate-like extension section 5 '), in particular in order to be able to better attach the rear latching projections 83.
- the base 5 can also be designed as a whole plate-like.
- a cutout 77 is provided in the region of the front of the covering hood 75, 76, which enables the clamping arm 8 to pass through and to pivot it.
- the recess 77 can continue into the ceiling wall 78 of the cover 75 according to FIG. 7, so that a passage to the outside is possible for the manual actuation lever 45. It would also be conceivable to provide a separate longitudinal slot 77 'for the penetration and the pivotability of the manual actuation lever 45 in the ceiling wall 78, as is indicated by dash-dotted lines in FIG.
- the tensioning device In the presence of a drive device 37, the tensioning device has a relatively long construction (FIG. 8), so that the covering hood 76 also turns out to be correspondingly long. In order not to interfere with the actuation of the manual actuation lever 45 due to the overall height, it is advisable to choose a course of the ceiling wall 78 that slopes towards the rear, which is indicated in FIG. 8 by the contour line 80.
- the length of the The actuating arm 15 and the attachment points of the stop projections 68 on the tensioning arm 8 are coordinated with one another such that the actuating arm 15 can be pivoted back under the stop projections 68 into the position shown in FIG. 5 when the tensioning arm 8 is pivoted back sufficiently.
- the extreme mobility of the first pivoting region 12 ensures that the clamping arm 8 can be pivoted back into a position in which the distance of the stop projections 68 from the second pivoting region 14 is equal to or greater than the length of the actuating arm 15, so that it can be swung past beneath it.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Clamps And Clips (AREA)
- Sampling And Sample Adjustment (AREA)
- Physical Vapour Deposition (AREA)
Abstract
Description
- Die Erfindung betrifft eine Spannvorrichtung, insbesondere zum lösbaren Spannen von Gegenständen gegen eine Unterlage, mit einer Basis, an der über einen ersten Schwenkbereich ein in einer Gebrauchslage nach vorne ragender Spannarm schwenkbar angeordnet ist und an der über einen zweiten Schwenkbereich ein in der Gebrauchslage nach oben ragender, in Überkreuzstellung an dem Spannarm vorbeigreifender Betätigungsarm schwenkbar angeordnet ist, wobei sich zwischen dem Spannarm und einem oberhalb diesem angeordneten Abschnitt des Betätigungsarmes ein Führungsarm erstreckt, der über einen dritten Schwenkbereich mit dem Spannarm und über eine Steckachse mit dem Betätigungsarm schwenkbar verbunden ist.
- Eine Spannvorrichtung dieser Art geht aus dem deutschen Gebrauchsmuster DE 78 38 562 U1 hervor. Dort sind alle Schwenkbereiche durch Steckachsen bestehend aus separaten Achsbolzen definiert, über die die einzelnen Arme an der Basis sowie untereinander verschwenkbar gelagert sind.
- Nachteilig bei der bekannten Spannvorrichtung ist die große Anzahl separater Bauteile, die einer getrennten Fertigung bedürfen und anschließend in aufwendiger Arbeit zusammengebaut werden müssen.
- Entsprechendes gilt für ähnliche Spannvorrichtungen, die aus der DE 91 01 555 U1 sowie dem Katalog "Spanntechnik" der Firma DE-STA-CO, Frankfurt, 89, Seiten 6, 7-21 und dem Katalog "Spannelemente, Schraubwerkzeuge" der Firma Andreas Maier, Fellbach, Seiten 38-41 und 48-53 hervorgehen.
- Es ist die Aufgabe der vorliegenden Erfindung, eine Spannvorrichtung der eingangs genannten Art zu schaffen, deren Aufbau bei hoher Stabilität eine einfachere Herstellung und Montage ermöglicht.
- Zur Lösung dieser Aufgabe ist vorgesehen, daß die Basis, die drei Arme und die drei Schwenkbereiche feste Bestandteile eines einstückigen gegossenen Kunststoffkörpers sind, wobei die drei Schwenkbereiche von Biegeabschnitten in Form bandähnlicher biegeflexibler Materialbereiche des Kunststoffkörpers gebildet sind, deren Biegeflexibilität ausreichend groß ist, um den Spannarm und den Betätigungsarm aus einer unmittelbar nach der Gießherstellung vorliegenden ungekreuzten Ausgangslage in die sich überkreuzende und durch die Steckachse fixierte Gebrauchslage zu verschwenken.
- Auf diese Weise verfügt die Spannvorrichtung anstelle einer Vielzahl einzelner Bauelemente über einen einstückigen, vorzugsweise durch Spritzgießen herstellbaren Kunststoffkörper, bei dem die drei Schwenkbereiche von einstückigen biegeelastischen Materialbereichen des Kunststoffkörpers gebildet sind. Um die Gießherstellung zu ermöglichen, ist die Formgebung so gewählt, daß der Spannarm und der Betätigungsarm unmittelbar nach der Gießherstellung eine ungekreuzte, sich also nicht überlappende Ausgangslage relativ zueinander einnehmen, die gießtechnisch problemlos herstellbar ist. Um die Spannvorrichtung in den Gebrauchszustand zu versetzen, werden die Arme anschließend von der Ausgangslage in die sich überkreuzende Gebrauchslage verschwenkt, die über die Steckachse im Verbindungsbereich zwischen dem Betätigungsarm und dem Führungsarm fixiert wird. Dabei sind die Biegeabschnitte durch ihre bandähnliche Ausgestaltung in der Lage, sowohl die zum Einrichten der Gebrauchslage notwendige als auch die im Betrieb erforderliche Schwenkbeweglichkeit zu gewährleisten.
- Zwar gehen aus der GB 2 078 849 A, der DE 41 15 912 A1 und der DE 42 40 814 A1 einstückige Spannvorrichtungen und Greifvorrichtungen hervor, die über von Biegebereichen gebildete Gelenke verfügen. Es handelt sich dabei allerdings um andere konstruktive Lösungen, bei denen die vorgenannten Maßnahmen zur Vereinfachung der Herstellung und Montage nicht vorgesehen sind.
- Vorteilhafte Weiterbildungen der Erfindung sind in den Unteransprüchen aufgeführt.
- Zweckmäßigerweise ist der Betätigungsarm im Anschluß an den zugeordneten Biegeabschnitt in zwei beabstandete Armelemente unterteilt, zwischen der Spannarm hindurchgreift, so daß sie an diesem beidseits vorbeigreifen.
- Eine besonders vorteilhafte Ausgestaltung zur Lösung der zugrundeliegenden Aufgabe sieht vor, daß an dem Betätigungsarm ein gemeinsam mit diesem verschwenkbare Verriegelungseinrichtung vorgesehen ist, die in einer Spannstellung der Spannvorrichtung eine Verriegelungsstellung einnimmt, in der sie eine am Spannarm vorgesehene Anschlageinrichtung übergreift und den Spannarm gegen Hochschwenken sichert. Dabei liegt in der Spannstellung bei gespanntem Gegenstand zweckmäßigerweise eine Rastverbindung zwischen der Verriegelungseinrichtung und der Anschlageinrichtung vor, die ein selbsttätiges Lösen verhindert, durch Zurückschwenken des Betätigungsarmes jedoch problemlos aufgehoben werden kann.
- Durch das Zusammenwirken zwischen der Verriegelungseinrichtung und der Anschlageinrichtung wird der die Bewegung des Betätigungsarmes auf den Schwenkarm übertragende Führungsarm vorteilhaft entlastet. Die beim Spannen vom zu spannenden Gegenstand auf den Spannarm ausgeübten Gegenkräfte werden durch das formschlüssige Zusammenwirken zwischen der Verriegelungseinrichtung und der Anschlageinrichtung im wesentlichen vom Betätigungsarm aufgenommen.
- In diesem Zusammenhang ist es vorteilhaft, an dem Spannarm zwischen dem ersten Schwenkbereich und der beabstandet zu diesem angeordneten Anschlageinrichtung eine Abstützpartie vorzusehen, die in der Spannstellung der Spannvorrichtung eine Abstützstellung einnimmt, in der sie sich an einer an der Basis angeordneten Widerlagerpartie abstützt, die sie hierbei zweckmäßigerweise übergreift. Die vom gespannten Gegenstand auf den Spannarm ausgeübte Gegenkraft hat die Tendenz, den Spannarm um den Wirkbereich zwischen der Verriegelungseinrichtung und der Abstützeinrichtung zu verschwenken. Um die Belastung des den ersten Schwenkbereich vorgebenden Biegeabschnittes zu reduzieren, wird durch das Zusammenwirken zwischen der Abstützpartie und der Widerlagerpartie ein Großteil der Beanspruchung aufgefangen.
- Im Bereich der Rückseite der Basis ist zweckmäßigerweise ein nach oben ragender biegeflexibler Sicherungsarm einstückig angeformt, der einen Bestandteil des einstückigen Kunststoffkörpers bildet und über einen Sicherungsvorsprung verfügt, der zur lösbaren Fixierung einer Offenstellung der Spannvorrichtung eine zugeordnete Sicherungspartie am Führungsarm und/oder Betätigungsarm hintergreifen kann, wobei dann zweckmäßigerweise eine lösbare Rastverbindung vorliegt.
- Bei einer für den Handbetrieb ausgelegten Spannvorrichtung ist zweckmäßigerweise an dem Betätigungsarm ein Handbetätigungshebel vorgesehen, der vorzugsweise lösbar angesteckt ist.
- Um einen maschinellen Antrieb der Spannvorrichtung zu ermöglichen, findet sich zweckmäßigerweise im rückwärtigen Bereich der Basis eine ebenfalls zu dem einstückigen Kunststoffkörper gehörende verschwenkbare Haltelasche, an der eine Antriebseinrichtung festlegbar ist, deren bewegliches angetriebenes Antriebsglied insbesondere unter Vermittlung der Steckachse an dem Betätigungsarm angreift. Die Antriebseinrichtung kann in zweckmäßiger Ausgestaltung teilweise einstückig mit der Haltelasche verbunden sein. Beispielsweise könnte im Falle eines Arbeitszylinders das Gehäuse des Arbeitszylinders einstückig an der Haltelasche angeformt und somit ein Bestandteil des einstückigen Kunststoffkörpers sein.
- Der Handbetätigungshebel und die Antriebseinrichtung können gleichzeitig vorgesehen sein, um eine wahlweise Betätigung zu ermöglichen. Hier besteht auch die Möglichkeit lediglich den Spann- oder Lösevorgang maschinell durch die Antriebseinrichtung und den jeweils anderen Vorgang manuell durchzuführen.
- Insbesondere zur Vermeidung von Verletzungen im Betrieb ist es empfehlenswert, eine wenigstens den Kunststoffkörper umschließende Abdeckhaube vorzusehen, die im Bereich der Vorderseite eine Aussparung aufweist, durch die der Spannarm ohne Beeinträchtigung seiner Schwenkbewegungen hindurchgreifen kann. Ist eine insbesondere fluidbetätigte Antriebseinrichtung vorhanden, kommt zweckmäßigerweise auch diese unter der Abdeckhaube zu liegen.
- Nachfolgend wird die Erfindung anhand der beiliegenden Zeichnung näher erläutert. In dieser zeigen:
- Figur 1
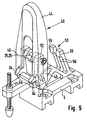
- eine erste Bauform der erfindungsgemäßen Spannvorrichtung in perspektivischer Darstellung,
- Figur 2
- die Spannvorrichtung aus Figur 1 in der dort eingenommenen Spannstellung in Seitenansicht,
- Figur 3
- die Spannvorrichtung aus Figuren 1 und 2 in einer möglichen Offenstellung,
- Figur 4
- den einstückigen Kunststoffkörper der Spannvorrichtung im Ausgangszustand unmittelbar nach der Gießherstellung,
- Figuren 5 und 6
- Zwischenstellungen des Kunststoffkörpers bei der Überführung in die Gebrauchsstellung durch Verschwenken des Betätigungsarmes und des Spannarmes,
- Figuren 7 und 8
- verschiedene Ausführungsformen einer Abdeckhaube für die Spannvorrichtung, und
- Figur 9
- eine ausschließlich für den Handbetrieb vorgesehene Ausführung der Spannvorrichtung.
- Die beispielsgemäße Spannvorrichtung 1 ist im betriebsbereiten Zustand an einem Träger 2 befestigt und ermöglicht es, einen beliebigen Gegenstand 3, regelmäßig ein Werkstück, gegen eine beispielsweise von dem Träger 2 gebildete Unterlage 4 zu spannen. Dies geschieht beispielsweise zu dem Zweck, um den Gegenstand 3 während erforderlicher Schweißarbeiten lösbar festzulegen. Die Spannvorrichtung kann daher vorteilhaft in der Fertigungs- und Montagetechnik eingesetzt werden.
- Die Spannvorrichtung 1 besitzt eine sockelähnliche Basis 5 mit Befestigungslöchern 6 zum Anschrauben an den Träger 2.
- An der Oberseite der Basis 5, etwa im mittleren Bereich, ragt eine höckerartige Erhebung 7 nach oben. Sie bildet praktisch einen Lagerbock für einen schwenkbar an der Basis 5 gelagerten Spannarm 8. Dieser Spannarm 8 ist über einen ersten Schwenkbereich 12 verschwenkbar mit der Basis 5 verbunden, wobei sich der Verbindungsbereich 13 zweckmäßigerweise im oberen Bereich der Erhebung 7 befindet.
- In der aus Figuren 2 und 3 ersichtlichen Gebrauchslage, wobei die Figur 2 eine Spannstellung und die Figur 3 eine Offenstellung der Spannvorrichtung zeigt, ragt der Spannarm 8 ausgehend von dem ersten Schwenkbereich 12 nach vorne. In der Spannstellung gemäß Figur 2 verläuft er im wesentlichen horizontal. In der Offenstellung gemäß Figur 3 ragt er gleichzeitig nach oben, so daß eine Schrägstellung vorliegt.
- Im vorderen Bereich der Basis 5 ist über einen zweiten Schwenkbereich 14 ein Betätigungsarm 15 schwenkbar angeordnet, wobei die Ebene der Schwenkbewegung mit derjenigen des Spannarmes 8 zusammenfällt oder parallel zu dieser ausgerichtet ist. In den aus Figuren 2 und 3 hervorgehenden Gebrauchslagen ragt der Betätigungsarm 15 ausgehend von der Basis 5 nach oben, wobei er in der Spannstellung gemäß Figur 2 im wesentlichen vertikal ausgerichtet ist und in der Offenstellung gemäß Figur 3 eine nach hinten gerichtete Schräglage einnimmt.
- Der Spannarm 8 und der Betätigungsarm 15 nehmen relativ zueinander eine Überkreuzstellung ein. Der Betätigungsarm 15 greift an dem Spannarm 8 vorbei. Zu diesem Zweck ist der Betätigungsarm 15 im Anschluß an den zweiten Schwenkbereich 14 in zwei seitlich beabstandete und parallel zueinander verlaufende Armelemente 16, 16' unterteilt, die einen Zwischenraum 19 definieren, der vom Spannarm 8 von hinten her durchsetzt wird.
- Zwischen einem zumindest in der Spannstellung mit Abstand oberhalb des Spannarmes 8 angeordneten Betätigungsabschnitt 17 des Betätigungsarmes 15 und dem Spannarm 8 erstreckt sich ein auch als Lenkhebel bezeichenbarer Führungsarm 18. Dieser ist sowohl mit dem Betätigungsabschnitt 17 als auch mit dem Spannarm 8 schwenkbar verbunden. Wiederum verläuft die Ebene der Schwenkbewegung in Übereinstimmung oder parallel mit den vorerwähnten Schwenkebenen des Spannarmes 8 und des Betätigungsarmes 15.
- Die Verbindung zwischen dem Führungsarm 18 und dem Spannarm 8 erfolgt unter Vermittlung eines dritten Schwenkbereiches 22 an einer zwischen dem ersten Schwenkbereich 12 und dem beabstandet zu diesem angeordneten vorderen Spannabschnitt 23 liegenden Verbindungsstelle 24.
- Der Führungsarm 18 ragt in der aus Figur 2 ersichtlichen Spannstellung zweckmäßigerweise im wesentlichen vertikal nach oben, wobei er zumindest annähernd parallel zu dem Betätigungsarm 15 angeordnet sein kann. Zugunsten einer kompakten Bauweise erstreckt er sich in der Spannstellung gemäß Figur 2 innerhalb des erwähnten Zwischenraumes 19 zwischen den beiden Armelementen 16, 16'.
- Die schwenkbare Verbindung zwischen dem Führungsarm 18 und dem Betätigungsarm 15 ist mittels einer Steckachse 25 realisiert. Sie besteht beim Ausführungsbeispiel aus einem separaten Achsbolzen 26, der durch fluchtende Lagerdurchbrechungen 27, 27' des Betätigungsarmes 15 und des Führungsarmes 18 hindurchgesteckt ist.
- Um die Spannvorrichtung zwischen der Spannstellung gemäß Figur 2 und einer Offenstellung umzuschalten, wird eine Antriebskraft auf den Betätigungsarm 15 ausgeübt, die eine in Schwenkrichtung gemäß Pfeilen 28, 28' wirksame Komponente hat. Der sich demzufolge um den zweiten Schwenkbereich 14 verschwenkende Betätigungsarm 15 übt über den Führungsarm 18 in Abhängigkeit von der Schwenkrichtung eine Zug- oder Druckkraft auf den Spannarm 8 aus, so daß dieser seinerseits eine Schwenkbewegung um den ersten Schwenkbereich 12 ausübt, die durch Doppelpfeil 30 angedeutet ist.
- In vorteilhafter Ausgestaltung sind wenigstens die Basis 5, der Spannarm 8, der Betätigungsarm 15 und der Führungsarm 18 sowie der erste, zweite und dritte Schwenkbereich 12, 14, 22 feste einstückige Bestandteile eines allgemein mit 32 bezeichneten Kunststoffkörpers, der zweckmäßigerweise ein durch Spritzgießtechnik hergestelltes Gußteil ist. Die erwähnten Komponenten sind somit in einem einzigen Bauteil in Gestalt des Kunststoffkörpers 32 vereinigt. Dabei sind die Schwenkbereiche 12, 14, 22 vergleichbar der Filmscharniertechnik von bandähnlichen biegeflexiblen Materialbereichen des Kunststoffkörpers 32 gebildet, die als Biegeabschnitte 33 bezeichnet seien. Bevorzugt handelt es sich um einen Polymerkunststoff, wobei sich Polypropylenkunststoff als besonders zweckmäßig erwiesen hat. Die erwähnten Arme 8, 15, 18 sind über die länglichen und verhältnismäßig dünnen Biegeabschnitte 33 vorzugsweise federelastisch am sie tragenden Bauteil aufgehängt.
- Durch die bandähnliche Ausgestaltung der Biegeabschnitte 33 wird erreicht, daß die Schwenkbereiche nicht auf eine feste Schwenkachse konzentriert sind, sondern daß sich die beim Schwenken auftretenden Biegevorgänge über eine größere Materiallänge verteilen, so daß die Biegewechselbeanspruchung des Materials reduziert ist und eine lange Lebensdauer erwartet werden kann. Darüberhinaus vereinfachen die derart gestalteten Biegeabschnitte 33 die Herstellung des Kunststoffkörpers 32. In diesem Zusammenhang sei auf die Figuren 4 bis 6 verwiesen.
- Der beispielsgemäße Kunststoffkörper 32 ist durch Spritzgießen von Kunststoff hergestellt. Die zugrundeliegende Gießform ist dabei so ausgebildet, daß der Kunststoffkörper 32 unmittelbar nach der Gießherstellung den aus Figur 4 ersichtlichen Ausgangszustand einnimmt, bei dem sich der Spannarm 8 und der diesem vorgelagerte Betätigungsarm 15 in einer ungekreuzten Ausgangslage befinden. Sie nehmen eine in Längsrichtung 31 des Kunststoffkörpers 32 aufeinanderfolgende Stellung ein, vorzugsweise derart, daß sie ausgehend von der Basis 5 schräg nach vorne und gleichzeitig nach oben gerichtet sind. Es sind keinerlei im Betrieb relativ zueinander bewegte Teile vorhanden, die sich kreuzen bzw. überlappen. Der am Spannarm 8 angeformte Führungsarm 18 ragt zu der dem Betätigungsarm 15 entgegengesetzten Richtung.
- Um den Kunststoffkörper 32 in den Gebrauchszustand zu verbringen, wird der Betätigungsarm 15 gemäß Figuren 5 und 6 zurückgeschwenkt, bis die in Figur 6 noch leicht versetzt gezeigten Lagerdurchbrechungen 27, 27' des Betätigungsarmes 15 und des Führungsarmes 18 fluchten, so daß die Steckachse 25 hindurchsteckbar ist. Beim Zurückschwenken des Betätigungsarmes 15 und beim gleichzeitigen Nach-unten-Schwenken des Spannarmes 8 greift letzterer von oben her in den Zwischenraum 19 zwischen den beiden Armelementen 16, 16' ein.
- Infolge des guten Verformungsvermögens des ersten und zweiten Schwenkbereiches 12, 14 besteht keine Gefahr, daß die dortigen Biegeabschnitte 33 überdehnt werden.
- Bei den Ausführungsbeispielen gemäß Figuren 1 bis 8 ist ein maschineller Antrieb der Spannvorrichtung 1 vorgesehen. Zu diesem Zweck ist in dem hinter den drei Schwenkbereichen 12, 14, 22 liegenden Bereich und dabei vorzugsweise am rückwärtigen Endbereich der Basis 5 eine nach oben ragende Haltelasche 34 einstükkig angeformt. Sie bildet einen Bestandteil des einstückigen Kunststoffkörpers 32. Die Verbindung zur Basis 5 erfolgt über einen vierten Schwenkbereich 35, der vergleichbar den vorerwähnten Schwenkbereichen durch einen biegeelastischen bandähnlich dünnen Biegeabschnitt 33 definiert wird. Dadurch ist die plattenähnliche Haltelasche 34 in der Lage, in der gleichen Schwenkebene wie die verschiedenen Arme eine Schwenkbewegung 36 um den vierten Schwenkbereich 35 auszuführen. Die Ebene der Haltelasche 34 verläuft quer zur Schwenkrichtung 36.
- An der dem Betätigungsarm 15 abgewandten Rückseite der Haltelasche 34 ist eine Antriebseinrichtung 37 festgelegt, die beispielsgemäß von einem pneumatisch betätigten Arbeitszylinder 38 gebildet ist. Dieser ist mit seinem Gehäuse an der Haltelasche 34 befestigt, wobei sein von einer Kolbenstange gebildetes Antriebsglied 42 durch die Haltelasche 34 hindurchtritt und mit ihrem vorderen Ende am Betätigungsabschnitt 17 des Betätigungsarmes 15 angreift. Zweckmäßigerweise ist das Antriebsglied 42 an dem Achsbolzen 26 um dessen Längsachse verdrehbar festgelegt. Um eine kompakte Anordnung zu ermöglichen, kann der Führungsarm 18 im Bereich der Steckachse 25 über eine von letzterer überbrückte Aussparung 43 verfügen, in die der vom Achsbolzen 26 durchsetzte Abschnitt des Antriebsgliedes 42 hineinragt.
- Der Arbeitszylinder 38 ist beispielsgemäß ein doppeltwirkender Arbeitszylinder, so daß durch gesteuerte Fluidbeaufschlagung über zwei Druckmittelleitungen 41 in an sich bekannter Weise eine Axialbewegungen des Antriebsgliedes 42 in der einen oder anderen Richtung ausgelöst werden kann, je nachdem, ob die Spannvorrichtung geschlossen oder geöffnet werden soll. Der vierte Schwenkbereich 35 gestattet hierbei eine selbsttätige Ausrichtung der Antriebseinrichtung 37 in Abhängigkeit von der Schwenklage des Betätigungsabschnittes 17.
- Es wäre denkbar, das Gehäuse der Antriebseinrichtung 17 als einstückigen Bestandteil des Kunststoffkörpers 32 auszuführen, indem es unmittelbar an die Haltelasche 34 angeformt wird.
- Soll eine Spannvorrichtung 1 lediglich für manuellen Betrieb ausgelegt werden, kann die Haltelasche 34 gemäß Figur 9 entfallen. In diesem Falle ist der Betätigungsarm 15 zugunsten einer verbesserten Hebelwirkung über den Betätigungsabschnitt 17 hinaus verlängert, so daß ein Handgriff 44 vorliegt, über den der Betätigungsarm 15 mit wenig Kraftaufwand vor und zurück geschwenkt werden kann.
- Um auf einen standardisierten Kunststoffkörper 32 zurückgreifen zu können, ist der Handgriff 44 zweckmäßigerweise an einem Handbetätigungshebel 45 vorgesehen, der lösbar an dem Betätigungsarm 15 festgelegt ist. Beispielsgemäß ist er auf den Betätigungsarm 15 lösbar aufgesteckt. Bei der Bauform gemäß Figur 9 verfügt der Handbetätigungshebel 45 über zwei beabstandete U-ähnlich profilierte Haltearme 46, die jeweils formschlüssig auf einem der Armelemente 16, 16' sitzen und diese an der Außenseite flankieren. Im Bereich des freien Endes der Haltearme 46 können nach innen ragende Rastvorsprünge 47 vorgesehen sein, die in komplementäre Rastausnehmungen 48 der Armelemente 16, 16' einrasten können. Der Handbetätigungshebel 45 kann zusätzlich über den Achsbolzen 26 fixiert sein, wenn dieser über den Betätigungsarm 15 hinausragt und in eine fluchtende Öffnung 52 des Handbetätigungshebels 45 eintaucht.
- Die Spannvorrichtung kann also sowohl für manuellen als auch für maschinellen Betrieb ausgebildet sein. Außerdem besteht die Möglichkeit, einen gemischt manuellen und maschinellen Betrieb vorzusehen, wie dies in Figur 7 angedeutet ist. Dort ist sowohl eine Antriebseinrichtung 37 als auch ein lediglich strichpunktiert angedeuteter Handbetätigungshebel 45 vorgesehen, wobei der Handbetätigungshebel 45 an dem Betätigungsarm beispielsweise durch Anstecken zweckmäßigerweise lösbar festgelegt ist. Es besteht nun die Möglichkeit, bei komplizierten Spannaufgaben den Spannvorgang unter Verwendung des Handbetätigungshebels manuell auszuführen, während das spätere Lösen maschinell unter Einsatz der Antriebseinrichtung 37 erfolgen kann. Auch eine umgekehrte Betriebsweise - maschinelles Spannen, manuelles Lösen - wäre natürlich möglich.
- Ungeachtet der Art des Antriebes kann die Spannvorrichtung 1 mit einer Sicherungseinrichtung 53 ausgestattet sein, die eine Arretierung des Spannarmes 8 in der in Figur 3 strichpunktiert angedeuteten maximalen Offenstellung 58 ermöglicht.
- Die Sicherungseinrichtung des Ausführungsbeispieles verfügt über einen hinter dem Schwenkarm 8 und vorzugsweise im Anschluß an die Erhebung 7 angeordneten Sicherungsarm 54, der nach oben ragt. Er ist einstückiger Bestandteil des Kunststoffkörpers 32 und verfügt über eine Materialstärke, die ihm eine Biegeelastizität verleiht, so daß er in der Schwenkebene der übrigen Arme elastisch vor und zurück biegbar ist. Beispielsgemäß erstreckt er sich ausgehend von der Basis 5 nach oben und gleichzeitig nach vorne, so daß er eine Schräglage einnimmt.
- Vorzugsweise im Bereich seines freien Endes verfügt der Sicherungsarm 54 über wenigstens einen nach vorne ragenden Sicherungsvorsprung 55. Im vorliegenden Falle, wo der Sicherungsarm 54 durch eine mittigen Längsschlitz in zwei Armpartien 56 unterteilt ist, ist an jeder dieser Armpartien 56 ein solcher Sicherungsvorsprung 55 angeformt.
- Beim Öffnen der Spannvorrichtung 1 verlagert sich der Betätigungsabschnitt 17 gemäß Pfeil 28 etwa annähernd auf einem Kreisbogen nach rückwärts und gleichzeitig nach unten zur Basis 5. Dabei gelangt eine im Bereich des Betätigungsabschnittes 17 angeordnete Sicherungspartie 57 in eine in Figur 3 strichpunktiert bei 59 angedeutete Sicherungsstellung unter dem Sicherungsvorsprung 55. Beim Verlagern in die Sicherungsstellung 59 drückt die Sicherungspartie 57 den Sicherungsvorsprung 55 kurzzeitig zurück, was durch die Biegeelastizität des Sicherungsarmes 54 ermöglicht wird. Anschließend schnappt der Sicherungsvorsprung 55 über die Sicherungspartie 57 und fixiert somit die maximale Offenstellung.
- Die Sicherungspartie 57 könnte am Betätigungsarm 15 angeordnet sein. Beispielsgemäß befindet sie sich allerdings in vorteilhafter Ausgestaltung an dem von der Steckachse 25 durchsetzten Endbereich des Führungsarmes 18 und ist von zwei nockenähnlichen Erhebungen 62 an den beiden die Aussparung 43 flankierenden Partien des Führungsarmes 18 gebildet.
- Die Sicherungseinrichtung 53 ist so gestaltet, daß die Rastverbindung durch die gemäß Pfeil 28' auf den Betätigungsarm 15 ausgeübte Antriebskraft selbsttätig gelöst werden kann. Dies erreicht man problemlos durch entsprechende Formgebung des Sicherungsvorsprunges 55 und der mit diesem zusammenwirkenden Sicherungspartie 57.
- Zugunsten eines optimalen Verformungsverhaltens sind die verschiedenen Schwenkbereiche verhältnismäßig dünn ausgeführt. Dies gilt auch für den dritten Schwenkbereich 22 im Übergangsbereich zwischen dem Führungsarm 18 und dem Spannarm 8. Der Führungsarm 18 ist daher nur bedingt geeignet, die zum Spannen erforderliche Spannkraft auf den Spannarm 8 zu übertragen, mit der dieser auf den zu spannenden Gegenstand 3 einwirkt. Diese Krafteinwirkung erfolgt im übrigen beim Ausführungsbeispiel unter Vermittlung eines am Spannabschnitt 23 festgelegten bolzenähnlichen Spannteils 60 (in Figuren 3 bis 6 nicht abgebildet), das an der Unterseite einen Spannkopf 63 aufweist, der auf dem zu spannenden Gegenstand 3 aufliegt. Indem das Spannteil 60 verstellbar am Spannarm 8 angeordnet ist, kann unterschiedlichen Formgebungen der zu spannenden Gegenstände 3 Rechnung getragen werden.
- Um die erforderliche Spannkraft zu gewährleisten, ist an dem Betätigungsarm 15 eine gemeinsam mit diesem verschwenkbare Verriegelungseinrichtung 64 vorgesehen, die in der Spannstellung der Spannvorrichtung die aus Figuren 1 und 2 ersichtliche Verriegelungsstellung einnimmt, in der sie eine am Spannarm 8 vorgesehene Anschlageinrichtung 65 übergreift und dadurch den Spannarm nach unten drückt und gleichzeitig gegen ein Hochschwenken in Richtung der Offenstellung sichert.
- Die Anschlageinrichtung 65 sitzt axial zwischen dem ersten Schwenkbereich 12 und dem Spannabschnitt 23 des Spannarmes 8. Aufgrund der über den verhältnismäßig langen Biegeabschnitt 33 am ersten Schwenkbereich 12 erzielten äußerst flexiblen Aufhängung des Spannarmes 8 hat dieser die Tendenz, mit dem zwischen dem Verbindungsbereich 13 und der Anschlageinrichtung 65 liegenden Armabschnitt aufgrund der Hebelwirkung nach unten zu tauchen. Damit wurde allerdings die Spannkraft im Bereich des Spannabschnittes 23 nachlassen. Deshalb ist in dem erwähnten Zwischenbereich unten an dem Spannarm 8 eine zweckmäßigerweise von einem Materialvorsprung gebildete Abstützpartie 66 vorgesehen, die nach unten ragt. Ihr zugeordnet ist eine an der Basis 5 insbesondere im vorderen Bereich der höckerartigen Erhebung 7 angeformte Widerlagerpartie 67, die zweckmäßigerweise ebenfalls nach Art eines Vorsprunges ausgebildet ist und nach oben ragt. Die Anordnung, Ausrichtung und Gestaltung der beiden Partien 66, 67 ist so gewählt, daß die Schwenkbewegung des Spannarmes 8 zu keiner Zeit behindert wird. Beim Verschwenken in die Spannstellung schwenkt die Abstützpartie 66 oberhalb der Widerlagerpartie 67 ein und liegt dieser somit unmittelbar gegenüber. In der Spannstellung wird aufgrund der auftretenden Hebelwirkung die Abstützpartie 66 gegen die Widerlagerpartie 67 gedrückt und von dieser gegen ein Abtauchen gesichert. Dadurch erfolgt eine Abstützung bzw. Stabilisierung des zwischen der Anschlageinrichtung 65 und dem Verbindungsbereich 13 zu der höckerartigen Erhebung 7 liegenden Biegeabschnittes 33, so daß ungeachtet der im Bereich der Schwenkbereiche vorhandenen hohen Biegeflexibilität hohe Spannkräfte übertragbar sind.
- Beispielsgemäß ist die Anschlageinrichtung 65 von beidseits des Spannarmes 8 angeordneten Anschlagvorsprüngen 68 gebildet. Die Verriegelungseinrichtung 64 umfaßt zwei jeweils einem der Anschlagvorsprünge 68 zugeordnete Verriegelungsvorsprünge 71, die jeweils an der nach vorne weisenden Längsseite des einen der beiden Armelemente 16, 16' nach vorne ragend angeformt sind. Ihre in der Spannstellung den Anschlagvorsprüngen 68 zugewandte Verriegelungsfläche 72 hat einen abgewinkelten Verlauf und erstreckt sich, in der Spannstellung gesehen, zunächst im wesentlichen horizontal nach vorne, um anschließend über einen Eckenbereich 73 schräg nach vorne unten abzufallen. Dem Eckenbereich 73 liegt in der Spannstellung eine Kante 74 des zugeordneten Abstützvorsprunges 68 gegenüber. In der Spannstellung wird die Kante 74 aufgrund der vom Gegenstand 3 auf den Spannarm 8 ausgeübten Gegenkräfte fest in den Eckenbereich 73 hineingedrückt, so daß eine Art Rastverbindung vorliegt, die eine Aufrechterhaltung der Spannstellung auch dann garantiert, wenn am Betätigungsarm 15 keine Antriebskraft mehr angreift. Dadurch ist insbesondere der anhand der Figur 9 erläuterte manuelle Betrieb gewährleistet und man hat überdies die Möglichkeit, bei maschinellem Betrieb die Antriebseinrichtung 37 nach Umschalten in die Spannstellung vorübergehend außer Betrieb zu setzen.
- Um den abgewinkelten Verlauf der Verriegelungsfläche 72 zu erhalten, sind die zugeordneten Verriegelungsvorsprünge 71 beispielsgemäß hakenähnlich abgewinkelt ausgebildet.
- Da die Anschlageinrichtung 65 im Schwenkweg des Betätigungsarmes 15 liegt, dient sie vorzugsweise auch als Einrichtung zur Begrenzung dessen Schwenkweges bzw. zur Vorgabe seiner in der Spannstellung eingenommenen Lage.
- Um bei geringerem Materialbedarf eine hohe Steifigkeit des Spannarmes 8 zu erhalten, kann dieser bei Bedarf mit wenigstens einer einstückig angeformten Versteifungsrippe 84 versehen sein, die sich insbesondere an seiner Oberseite in Längsrichtung erstreckt. In Figur 8 ist eine derartige Ausgestaltung strichpunktiert angedeutet, wobei zwei im Bereich der seitlichen Ränder des Spannarmes verlaufende Versteifungsrippen 84 vorgesehen sind.
- Vorzugsweise verfügt die Spannvorrichtung über eine Erfassungseinrichtung zur Erfassung bestimmter Betriebsstellungen, die in Figur 3 strichpunktiert bei 85 angedeutet ist. Sie dient beispielsgemäß zur Erfassung der Spannstellung und einer Offenstellung. Dadurch ist es möglich, in Abhängigkeit von der jeweils erfaßten Stellung weitere, davon abhängige Vorgänge auszuführen.
- Beim Ausführungsbeispiel umfaßt die Erfassungseinrichtung 85 zwei vorzugsweise an der Basis 5 festgelegte Schalter 86, 87, die jeweils über ein bewegliches Schaltglied 88, 88' verfügen. An einem der Arme, beispielsgemäß an dem Betätigungsarm 15 sind zwei Betätigungspartien 89, 89' derart angeordnet, daß sie die Schwenkbewegung des Betätigungsarmes 15 mitmachen, wobei die Schalter 86, 87, derart angeordnet sind, daß jeweils eines der Schaltglieder 88, 88' im Verlagerungsweg der jeweils einen Betätigungspartie 89, 89' liegt. In der Offenstellung wirkt die eine Betätigungspartie 89' auf das Schaltglied 88' des einen Schalters 87 ein, woraus ein Signal resultiert, aus dem auf aktuelle Stellung geschlossen werden kann. In der Schließstellung wird über die andere Betätigungspartie 89 der andere Schalter 86 entsprechend betätigt, wobei dann der erstgenannte Schalter 87 deaktiviert ist. Auf diese Weise läßt sich ein Signal erzeugen, das auf die Einnahme der Spannstellung schließen läßt.
- Die Schalter sind über nicht näher dargestellte Leitungen mit einer ebenfalls nicht näher dargestellten Auswerteeinrichtung verbunden, in der die Signale verarbeitet werden, beispielsweise um eine visuelle Anzeige der momentanen Stellung oder die Ansteuerung anderer Einrichtungen zu ermöglichen. Insbesondere ist denkbar, in Abhängigkeit von der detektierten Stellung eine Betätigung der Antriebseinrichtung 37 vorzunehmen.
- Es versteht sich, daß die Anzahl der Schalter grundsätzlich beliebig ist, ebenso die Anzahl der Betätigungspartien. Bei den Schaltern kann es sich um beliebige Sensorelemente handeln, beispielsweise auch um berührungslos arbeitende Sensoren.
- Um im Betrieb der Spannvorrichtung die Verletzungsgefahr durch die sich bewegenden Bestandteile zu reduzieren, ist es empfehlenswert, zumindest den Kunststoffkörper 32 innerhalb einer Abdeckhaube unterzubringen, die in Figuren 7 und 8 in zwei möglichen Ausführungsbeispielen 75, 76 dargestellt ist. Beim Ausführungsbeispiel gemäß Figur 7 hat die Abdeckhaube 75 eine im wesentlichen quaderförmige äußere Gestalt, wobei lediglich der Kunststoffkörper 32 geschützt untergebracht ist, während die Antriebseinrichtung 37 rückseitig hinausragt.
- Die Abdeckhaube 76 gemäß Figur 8 verfügt über eine größere Baulänge, so daß nicht nur der Kunststoffkörper 32, sondern auch die an diesem angeordnete Antriebseinrichtung 37 unter den Abdeckhaube 76 verschwindet.
- Die Abdeckhaube 75, 76 ist zweckmäßigerweise lösbar an dem Kunststoffkörper 32 festgelegt, vorzugsweise im Bereich der Basis 5. Zur Anwendung kommt dabei insbesondere eine lösbare Rastverbindung. In Figur 8 ist eine mögliche Ausführungsform einer geeigneten Rastverbindungseinrichtung 81 angedeutet. Hierbei sind an der Abdeckhaube 76 im vorderen und im rückwärtigen Bereich, insbesondere auf Höhe der Basis 5, Ausnehmungen 82 vorgesehen, in die am Kunststoffkörper 32 und hierbei insbesondere an der Basis 5 vorgesehene federnde Rastvorsprünge 83 eingreifen können, oder umgekehrt. Die Figur 8 macht zudem deutlich, daß die Basis 5 über die Haltelasche 34 hinaus nach hinten verlängert sein kann (plattenartiger Verlängerungsabschnitt 5'), insbesondere um die rückwärtigen Rastvorsprünge 83 besser anbringen zu können. Die Basis 5 kann im übrigen durchaus insgesamt plattenartig ausgebildet sein.
- Bei allen Ausführungsbeispielen ist im Bereich der Vorderseite der Abdeckhaube 75, 76 eine Aussparung 77 vorgesehen, die den Durchgriff des Spannarmes 8 und dessen Schwenkbewegung ermöglicht.
- Soll die Abdeckhaube die manuelle Betriebsweise der Spannvorrichtung nicht beeinträchtigen, kann sich die Aussparung 77 gemäß Figur 7 in die Deckenwand 78 der Abdeckhaube 75 fortsetzen, so daß für den Handbetätigungshebel 45 ein Durchtritt nach außen möglich ist. Es wäre auch denkbar, für den Durchgriff und die Schwenkbarkeit des Handbetätigungshebels 45 in der Deckenwand 78 einen separaten Längsschlitz 77' vorzusehen, wie dies in Figur 8 strichpunktiert angedeutet ist.
- Bei Vorhandensein einer Antriebseinrichtung 37 baut die Spannvorrichtung relativ lang (Fig. 8), so daß auch die Abdeckhaube 76 entsprechend lang ausfällt. Um hierbei durch die Bauhöhe die Betätigung des Handbetätigungshebels 45 nicht zu beeinträchtigen, ist es empfehlenswert, einen nach hinten hin abfallenden Verlauf der Deckenwand 78 zu wählen, was in Figur 8 durch die Konturlinie 80 angedeutet ist.
- Damit die im Schwenkweg der Armelemente 16, 16' des Betätigungsarmes 5 angeordneten Anschlagvorsprünge 68 nicht hinderlich sind, wenn der Kunststoffkörper 32 durch Verschwenken des Spannarmes 8 und des Betätigungsarmes 15 aus dem in Figur 4 gezeigten Ausgangszustand in den Gebrauchszustand gebracht wird, sind die Länge des Betätigungsarmes 15 und die Anbringungsstellen der Anschlagvorsprünge 68 am Spannarm 8 derart aufeinander abgestimmt, daß sich der Betätigungsarm 15 bei ausreichend zurückgeschwenktem Spannarm 8 unter den Anschlagvorsprüngen 68 hindurch in die in Figur 5 gezeigte Stellung zurückschwenken läßt. Dabei gewährleistet die extreme Beweglichkeit des ersten Schwenkbereiches 12 ein problemloses Zurückschwenken des Spannarmes 8 bis in eine Position, in der der Abstand der Anschlagvorsprünge 68 vom zweiten Schwenkbereich 14 gleich oder größer der Länge des Betätigungsarmes 15 ist, so daß dieser darunter vorbeischwenkbar ist.
Claims (19)
- Spannvorrichtung, insbesondere zum lösbaren Spannen von Gegenständen (3) gegen eine Unterlage (4), mit einer Basis (5), an der über einen ersten Schwenkbereich (12) ein in einer Gebrauchslage nach vorne ragender Spannarm (8) schwenkbar angeordnet ist und an der über einen zweiten Schwenkbereich (14) ein in der Gebrauchslage nach oben ragender, in Überkreuzstellung an dem Spannarm (8) vorbeigreifender Betätigungsarm (15) schwenkbar angeordnet ist, wobei sich zwischen dem Spannarm (8) und einem oberhalb diesem angeordneten Abschnitt des Betätigungsarmes (15) ein Führungsarm (18) erstreckt, der über einen dritten Schwenkbereich (22) mit dem Spannarm (8) und über eine Steckachse (25) mit dem Betätigungsarm (15) schwenkbar verbunden ist, dadurch gekennzeichnet, daß die Basis (5), die drei Arme (8, 15, 18) und die drei Schwenkbereiche (12, 14, 22) feste Bestandteile eines einstückigen gegossenen Kunststoffkörpers (32) sind, wobei die drei Schwenkbereiche (12, 14, 22) von Biegeabschnitten (33) in Form bandähnlicher biegeflexibler Materialbereiche des Kunststoffkörpers (32) gebildet sind, deren Biegeflexibilität ausreichend groß ist, um den Spannarm (8) und den Betätigungsarm (15) aus einer unmittelbar nach der Gießherstellung vorliegenden ungekreuzten Ausgangslage in die sich überkreuzende und durch die Steckachse (25) fixierte Gebrauchslage zu verschwenken.
- Spannvorrichtung nach Anspruch 1, dadurch gekennzeichnet, daß der Spannarm (8) und der Betätigungsarm (15) in der Ausgangslage eine ausgehend von der Basis (5) schräg nach vorne und gleichzeitig nach oben gerichtete Position einnehmen.
- Spannvorrichtung nach Anspruch 1 oder 2, dadurch gekennzeichnet, daß der Betätigungsarm (15) im Anschluß an den zugeordneten Biegeabschnitt (33) in zwei beabstandete Armelemente (16, 16') unterteilt ist, zwischen denen der Spannarm (8) hindurchgreift.
- Spannvorrichtung, insbesondere zum lösbaren Spannen von Gegenständen (3) gegen eine Unterlage (4), mit einer Basis (5), an der über einen ersten Schwenkbereich (12) ein in einer Gebrauchslage nach vorne ragender Spannarm (8) schwenkbar angeordnet ist und an der über zweiten Schwenkbereich (14) ein in der Gebrauchslage nach oben ragender, in Überkreuzstellung an dem Spannarm (8) vorbeigreifender Betätigungsarm (15) schwenkbar angeordnet ist, wobei sich zwischen dem Spannarm (8) und einem oberhalb diesem angeordneten Abschnitt (17) des Betätigungsarmes (15) ein Führungsarm (18) erstreckt, der einerseits mit dem Betätigungsarm (15) und andererseits über einen dritten Schwenkbereich (22) mit dem Spannarm (8) schwenkbar verbunden ist, insbesondere nach einem der Ansprüche 1 bis 3, dadurch gekennzeichnet, daß die Basis (5), die drei Arme (8, 15, 18) und die drei Schwenkbereiche (12, 14, 22) feste Bestandteile eines einstückigen Kunststoffkörpers (32) sind, wobei die drei Schwenkbereiche (12, 14, 22) von Biegeabschnitten (33) in Form biegeflexibler Materialbereiche des Kunststoffkörpers (32) gebildet sind, und daß an dem Betätigungsarm (15) eine gemeinsame mit diesem verschwenkbare Verriegelungseinrichtung (64) vorgesehen ist, die in einer Spannstellung der Spannvorrichtung eine Verriegelungsstellung einnimmt, in der sie eine am Spannarm (8) vorgesehene Anschlageinrichtung (65) übergreift und den Spannarm (8) am Hochschwenken aus der Spannstellung hindert.
- Spannvorrichtung nach Anspruch 4, dadurch gekennzeichnet, daß in der Spannstellung bei gespanntem Gegenstand (3) eine Rastverbindung zwischen der Verriegelungseinrichtung (64) und der Anschlageinrichtung (65) vorliegt, die durch Zurückschwenken des Betätigungsarmes (15) lösbar ist.
- Spannvorrichtung nach Anspruch 4 oder 5, dadurch gekennzeichnet, daß die Verriegelungseinrichtung (64) von wenigstens einem, insbesondere hakenähnlich nach vorne ragenden Verriegelungsvorsprung (71) gebildet ist.
- Spannvorrichtung nach einem der Ansprüche 4 bis 6, dadurch gekennzeichnet, daß die Anschlageinrichtung (65) den Schwenkweg des Betätigungsarmes (15) begrenzt und dessen in der Spannstellung eingenommene Lage vorgibt.
- Spannvorrichtung nach einem der Ansprüche 4 bis 7, dadurch gekennzeichnet, daß an dem Spannarm (8) zwischen dem ersten Schwenkbereich (12) und der beabstandet zu diesem angeordneten Anschlageinrichtung (65) eine Abstützpartie (66) vorgesehen ist, die in der Spannstellung der Spannvorrichtung in eine Abstützstellung verschwenkt ist, in der sie sich an einer an der Basis (5) vorgesehenen und von ihr insbesondere übergriffenen Widerlagerpartie (67) abstützen kann.
- Spannvorrichtung nach Anspruch 8, dadurch gekennzeichnet, daß die Abstützpartie (66) und die Widerlagerpartie (67) von einstückig angeformten Materialvorsprüngen des Kunststoffkörpers (62) gebildet sind.
- Spannvorrichtung nach einem der Ansprüche 1 bis 9, dadurch gekennzeichnet, daß der zweite Schwenkbereich (14) im Bereich der Vorderseite der Basis (5) angeordnet ist und tiefer liegt als der erste Schwenkbereich (12), der den Schwenkarm (8) mit der oberen Partie einer höckerartigen Erhebung (7) der Basis (5) verbindet.
- Spannvorrichtung nach einem der Ansprüche 1 bis 10, dadurch gekennzeichnet, daß an der Basis (5) ein hinter dem Schwenkarm (8) nach oben ragender biegeflexibler Sicherungsarm (54) einstückig angeformt ist, der über wenigstens einen Sicherungsvorsprung (55) verfügt, der in einer Offenstellung der Spannvorrichtung eine Sicherungspartie (57) am Führungsarm (18) und/oder am Betätigungsarm (15) formschlüssig übergreift und dadurch die Offenstellung lösbar fixiert.
- Spannvorrichtung nach einem der Ansprüche 1 bis 11, dadurch gekennzeichnet, daß die Steckachse (25) von einem separaten, durch beide zu verbindenden Arme (15, 18) hindurchgesteckten Achsbolzen (26) gebildet ist.
- Spannvorrichtung nach einem der Ansprüche 1 bis 12, gekennzeichnet durch einen an dem Betätigungsarm (15) vorgesehenen, insbesondere lösbar daran festgelegten Handbetätigungshebel (45), der zweckmäßigerweise angesteckt ist.
- Spannvorrichtung nach einem der Ansprüche 1 bis 13, dadurch gekennzeichnet, daß der einstückige Kunststoffkörper (32) eine hinter dem Betätigungsarm (15) angeordnete Haltelasche (34) aufweist, die über einen von einem weiteren Biegeabschnitt (33) gebildeten vierten Schwenkbereich (45) schwenkbar an der Basis (5) angeordnet ist und zur Halterung einer zum Beispiel von einem fluidbetätigten Arbeitszylinder (38) gebildeten Antriebseinrichtung (37) dient, deren bewegliches Antriebsglied (42) insbesondere im Verbindungsbereich mit dem Führungsarm (18) an dem Betätigungsarm (15) angreift.
- Spannvorrichtung nach einem der Ansprüche 1 bis 14, gekennzeichnet durch eine wenigstens den Kunststoffkörper (32) umschließende Abdeckhaube (75, 76), die im Bereich der Vorderseite eine einen Durchgriff des Spannarmes (8) ermöglichende Aussparung (77) aufweist.
- Spannvorrichtung nach Anspruch 15, dadurch gekennzeichnet, daß die Abdeckhaube (75, 76) sowohl den Kunststoffkörper (32) als auch eine daran festgelegte Antriebseinrichtung (37) umschließt.
- Spannvorrichtung nach Anspruch 15 oder 16, dadurch gekennzeichnet, daß die Abdeckhaube (75, 76) mittels einer Rastverbindungseinrichtung (81) lösbar an dem Kunststoffkörper (32) festgelegt ist.
- Spannvorrichtung nach einem der Ansprüche 1 bis 17, dadurch gekennzeichnet, daß an dem Kunststoffkörper (32) eine Erfassungseinrichtung (85) zur Erfassung bestimmter Betriebsstellungen vorgesehen ist.
- Spannvorrichtung nach Anspruch 18, dadurch gekennzeichnet, daß die Erfassungseinrichtung (85) zwei Schalter (86, 87) enthält, die bei einer Spannstellung und einer Offenstellung der Spannvorrichtung ansprechen.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE29520730U | 1995-12-30 | ||
| DE29520730U DE29520730U1 (de) | 1995-12-30 | 1995-12-30 | Spannvorrichtung |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP0781630A1 true EP0781630A1 (de) | 1997-07-02 |
| EP0781630B1 EP0781630B1 (de) | 2001-04-11 |
Family
ID=8017371
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP96112841A Expired - Lifetime EP0781630B1 (de) | 1995-12-30 | 1996-08-09 | Spannvorrichtung |
Country Status (2)
| Country | Link |
|---|---|
| EP (1) | EP0781630B1 (de) |
| DE (2) | DE29520730U1 (de) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE19801057C1 (de) * | 1998-01-14 | 1999-03-04 | Andreas Maier Gmbh & Co | Spannvorrichtung |
| WO2000064054A1 (de) * | 1999-04-16 | 2000-10-26 | Euchner Gmbh + Co. | Vorrichtung zum schalten einer verbindung in abhängigkeit des zustandes einer zu überwachenden einrichtung, insbesondere sicherheitsschalter |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103899614B (zh) * | 2012-12-27 | 2016-04-20 | 北京谊安医疗系统股份有限公司 | 浮动连接定位组件 |
| DE102014115432B4 (de) * | 2014-10-23 | 2019-05-09 | Andreas Maier Gmbh & Co. Kg | Spannvorrichtung mit lösbar gehaltenem Handgriff und Verfahren zum Einspannen eines Werkstücks mittels einer solchen Spannvorrichtung |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB1401352A (en) * | 1971-10-02 | 1975-07-16 | Illinois Tool Works | Anchor devices |
| DE7838562U1 (de) * | 1978-12-27 | 1979-04-19 | De-Sta-Co Metallerzeugnisse Gmbh, 6000 Frankfurt | Spannvorrichtung |
| GB2078849A (en) * | 1980-07-01 | 1982-01-13 | Itw Ltd | Cable clamps |
| US4388747A (en) * | 1981-08-10 | 1983-06-21 | Plummer Walter A | One-piece molded toggle clamp |
| DE9101555U1 (de) * | 1991-02-12 | 1991-05-02 | De-Sta-Co Metallerzeugnisse Gmbh, 6000 Frankfurt | Spannvorrichtung |
| CH682379A5 (de) * | 1990-09-10 | 1993-09-15 | Sawatzki Engineering Harry L S | Vorrichtung zum Festklemmen eines Werkstückes. |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE4115912C2 (de) * | 1991-05-15 | 1994-03-24 | Mohammad Mohsen Prof Dr Saadat | Modularer Greifmechanismus für Handhabungsgeräte |
| DE4240814A1 (de) * | 1992-12-04 | 1994-06-09 | Bosch Gmbh Robert | Druckmittelbetätigte Greifvorrichtung |
-
1995
- 1995-12-30 DE DE29520730U patent/DE29520730U1/de not_active Expired - Lifetime
-
1996
- 1996-08-09 DE DE59606760T patent/DE59606760D1/de not_active Expired - Fee Related
- 1996-08-09 EP EP96112841A patent/EP0781630B1/de not_active Expired - Lifetime
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB1401352A (en) * | 1971-10-02 | 1975-07-16 | Illinois Tool Works | Anchor devices |
| DE7838562U1 (de) * | 1978-12-27 | 1979-04-19 | De-Sta-Co Metallerzeugnisse Gmbh, 6000 Frankfurt | Spannvorrichtung |
| GB2078849A (en) * | 1980-07-01 | 1982-01-13 | Itw Ltd | Cable clamps |
| US4388747A (en) * | 1981-08-10 | 1983-06-21 | Plummer Walter A | One-piece molded toggle clamp |
| CH682379A5 (de) * | 1990-09-10 | 1993-09-15 | Sawatzki Engineering Harry L S | Vorrichtung zum Festklemmen eines Werkstückes. |
| DE9101555U1 (de) * | 1991-02-12 | 1991-05-02 | De-Sta-Co Metallerzeugnisse Gmbh, 6000 Frankfurt | Spannvorrichtung |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE19801057C1 (de) * | 1998-01-14 | 1999-03-04 | Andreas Maier Gmbh & Co | Spannvorrichtung |
| WO2000064054A1 (de) * | 1999-04-16 | 2000-10-26 | Euchner Gmbh + Co. | Vorrichtung zum schalten einer verbindung in abhängigkeit des zustandes einer zu überwachenden einrichtung, insbesondere sicherheitsschalter |
Also Published As
| Publication number | Publication date |
|---|---|
| EP0781630B1 (de) | 2001-04-11 |
| DE59606760D1 (de) | 2001-05-17 |
| DE29520730U1 (de) | 1996-02-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| DE3532170C2 (de) | Vorrichtung zum Tragen einer Last | |
| EP0364782B1 (de) | Vorrichtung zum Verbinden einer Schreibtischplatte mit einem Traggestell | |
| DE2003302B2 (de) | Klemmvorrichtung zum lösbaren Zusammenklemmen von Extrudergehäuse und Extrusionsmundstück | |
| DE3528404C2 (de) | ||
| WO1997029017A1 (de) | Zusammenklappbarer abfallbeutelhalter | |
| EP0499708B1 (de) | Vorrichtung zum lösbaren Verbinden eines Ausstellarms mit einem Hilfslenker | |
| EP0781630A1 (de) | Spannvorrichtung | |
| EP2361808B1 (de) | Hecklastenträger | |
| DE4027452A1 (de) | Dachlasttraeger | |
| WO2019170722A1 (de) | Schnellmontagevorrichtung für roboterarm | |
| DE3144547C2 (de) | ||
| WO1996008390A1 (de) | Mit mikroschaltern versehener lenkstockschalter mit zwei betriebsstellungen und einer neutralstellung | |
| DE19822111B4 (de) | Dachträgeranbaukonstruktion | |
| DE19923641B4 (de) | Befestigungsvorrichtung zum lösbaren Verbinden zweier Teile eines Kunststoffgehäuses | |
| DE3135881C1 (de) | Spannzwinge | |
| DE10117213B4 (de) | Befestigung für eine Dachleiste im Dachkanal eines Kraftfahrzeuges | |
| CH687728A5 (de) | Tragrahmen fuer den Rahmen einer landwirtschaftlichen Erntemaschine. | |
| EP0992728A2 (de) | Halter für langgestreckte Gegenstände wie Rohre oder Schläuche | |
| EP0899646A1 (de) | Pedal für ein Kraftfahrzeug | |
| DE9300989U1 (de) | Fahrzeughebebühne | |
| DE3901960B4 (de) | Reserveradhalter | |
| DE102019103103A1 (de) | Sicherheits-Schaltanordnung mit Spannelement | |
| DE3627785C2 (de) | ||
| DE102004039415A1 (de) | Fadenverarbeitendes System und Fadenliefergerät | |
| DE29720659U1 (de) | Vorrichtung zum Abdichten des unteren Spaltes einer Tür |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): DE FR GB IT |
|
| 17P | Request for examination filed |
Effective date: 19970530 |
|
| RAP1 | Party data changed (applicant data changed or rights of an application transferred) |
Owner name: FESTO AG & CO |
|
| 17Q | First examination report despatched |
Effective date: 19971219 |
|
| GRAG | Despatch of communication of intention to grant |
Free format text: ORIGINAL CODE: EPIDOS AGRA |
|
| GRAG | Despatch of communication of intention to grant |
Free format text: ORIGINAL CODE: EPIDOS AGRA |
|
| GRAH | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOS IGRA |
|
| GRAH | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOS IGRA |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): DE FR GB IT |
|
| GBT | Gb: translation of ep patent filed (gb section 77(6)(a)/1977) |
Effective date: 20010411 |
|
| ITF | It: translation for a ep patent filed | ||
| REF | Corresponds to: |
Ref document number: 59606760 Country of ref document: DE Date of ref document: 20010517 |
|
| ET | Fr: translation filed | ||
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: IF02 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed | ||
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20020711 Year of fee payment: 7 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20020806 Year of fee payment: 7 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20020816 Year of fee payment: 7 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20030809 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20040302 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20030809 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20040430 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: ST |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES;WARNING: LAPSES OF ITALIAN PATENTS WITH EFFECTIVE DATE BEFORE 2007 MAY HAVE OCCURRED AT ANY TIME BEFORE 2007. THE CORRECT EFFECTIVE DATE MAY BE DIFFERENT FROM THE ONE RECORDED. Effective date: 20050809 |