EP1832544A2 - C-Haken mit automatischem Gewichtsausgleich - Google Patents
C-Haken mit automatischem Gewichtsausgleich Download PDFInfo
- Publication number
- EP1832544A2 EP1832544A2 EP07004720A EP07004720A EP1832544A2 EP 1832544 A2 EP1832544 A2 EP 1832544A2 EP 07004720 A EP07004720 A EP 07004720A EP 07004720 A EP07004720 A EP 07004720A EP 1832544 A2 EP1832544 A2 EP 1832544A2
- Authority
- EP
- European Patent Office
- Prior art keywords
- leg
- load
- hook
- hook according
- securing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images


Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C1/00—Load-engaging elements or devices attached to lifting or lowering gear of cranes or adapted for connection therewith for transmitting lifting forces to articles or groups of articles
- B66C1/10—Load-engaging elements or devices attached to lifting or lowering gear of cranes or adapted for connection therewith for transmitting lifting forces to articles or groups of articles by mechanical means
- B66C1/22—Rigid members, e.g. L-shaped members, with parts engaging the under surface of the loads; Crane hooks
- B66C1/24—Single members engaging the loads from one side only
Definitions
- the invention relates to a C-hook with automatic counterbalance according to the preamble of claim 1.
- C-hooks are commonly used for receiving and transporting annular loads such as coils, rollers, rings, bushes and the like. They have one in their intended use substantially horizontal upper (first) leg on which a suspension device is provided, in which, for example, the load hook of a crane engages and a substantially also horizontal lower (second) leg, which also serves as a support arm or load receiving mandrel etc is designated, for receiving and transporting the annular loads.
- C-hooks in which on the first leg connected to a counterweight suspension means is provided, which is arranged axially displaceable by means of a first adjusting drive along the first leg. Due to the axial displaceability of the suspension with the counterweight of the C-hook can be balanced so that its second leg aligns substantially horizontally both in the unloaded and in the loaded state.
- the balancing is controlled by tilt sensors.
- the invention has for its object to provide a C-hook with automatic counterbalance, taken with the loads of different dimensions and can be safely transported without a time-consuming tare is required.
- the invention is based essentially on the idea of providing on the second leg a securing cam securing the respective load from the free end of the second leg, which is displaceable axially along the second leg by means of a second adjusting drive connected to the first adjusting drive via an intermediate gearbox. such that a displacement of the safety cam to secure the load causes a rectified displacement of the hanger with the counterweight.
- an operable by a control device electric motor is preferably provided. It can be provided between the electric motor and the first adjustment a slip clutch to protect the electric motor from overloads.
- the two adjusting drives are preferably self-locking spindle drives, wherein the spindle of the first adjusting drive cooperates with a first spindle nut, which is connected to the suspension device and / or the counterweight, and wherein the spindle of the second adjustment cooperates with a second spindle nut, which is connected to the safety cam.
- the intermediate gear advantageously comprises a chain drive, in which the chain is guided by sprockets which are arranged on a connecting the first leg and the second leg vertical leg of the C-hook.
- the safety cam does not interfere with the inclusion of a load, this is preferably retractable in its rest position in the second leg, such that it remains for receiving the load under the load receiving surface of the second leg in its retracted position and only after receiving the load to their Backup protrudes from the second leg.
- a first sensor in the support region of the load of the second leg and a second sensor in the contact region of the vertical leg is arranged, wherein the two sensors are electrically connected to the control device, the only then a signal for actuation the adjusting drives for the purpose of driving the safety cam generated to the load when both sensors have issued a corresponding signal.
- the safety cam is connected to a third sensor, which generates a signal when approaching or touching the load, which signal is forwarded to the control device and effects a shutdown of the adjusting drives.
- FIGS. 1-4 1 denotes a C-hook according to the invention with automatic weight compensation.
- the C-hook 1 consists of a first (upper) leg 2, on which a suspension device 3 is arranged for receiving the load hook 4 of a crane, not shown, intended for receiving annular loads 5, substantially horizontal second (lower) legs. 6 and a leg connecting the two legs 2 and 6 vertical leg. 7
- the suspension device 3 is connected to a counterweight 8, which is arranged to be displaceable axially along the first leg 2 together with the suspension device 3.
- a trained as a spindle drive first adjustment 9 is provided to move the counterweight 8.
- This is driven by an electric motor 10 (in the case shown, a spur gear motor), which acts via a slip clutch 11 and a chain transmission 12 on the spindle 13 of the spindle drive 9 and of a on the first leg 2 located control device 14 is supplied with power.
- the spindle 13 of the first adjusting drive 9 cooperates with a first spindle nut 15, which is connected to the suspension device 3.
- a respective load securing safety cam 16 is provided on the second leg 6, a respective load securing safety cam 16 is provided.
- the safety cam 16 is by means of a likewise designed as a spindle drive second adjusting drive 17 from a rest position in which it is located at the free outer end 18 of the second leg 6, in a closed position in which it is in the vicinity of the vertical leg 7, axially slidably disposed along the second leg 6.
- the spindle 25 of the second spindle drive 17 actuates a second spindle nut 34, which is fastened to a lower part of the securing cam 16.
- the second spindle drive 17 is connected via an intermediate gear 19 with the first adjusting drive 9, such that a displacement of the securing cam 16 for securing the respective load by means of the motor 10 causes a rectified displacement of the suspension device 3 with the counterweight 8.
- the intermediate gear 19 is composed in the illustrated embodiment of two partial transmissions 20, 21 together.
- the first partial transmission 20 is a gear transmission, which is connected via a coupling 22 with the spindle 13 of the first spindle drive 9.
- the second partial transmission 21 is a chain transmission connected downstream of the toothed wheel transmission 20.
- the gear ratio of the gear transmission 20 is selected such that at an adjustment of the suspension device 3 of 2.6 m / min, the adjustment of the safety cam 16 is about 8 m / min.
- the chain 23 is guided over sprockets 24, both at the respective mutually facing ends of the spindles 13, 25 of the two adjusting drives 9, 17 and on the vertical leg 7 of the C-hook 1 are arranged.
- the safety cam 16 is recessed in its rest position under the load receiving surface 26 of the second leg 6, so that when receiving a load of the safety cam 16 does not hinder this.
- the safety cam 16 or a carrier connected to the safety cam may be connected to the second spindle nut 34 via a hinge, so that the safety cam shortly before reaching its rest position e.g. is pressed by a corresponding guide under the load receiving surface 26.
- a first sensor 27 and in the contact region of the vertical leg 7, a second sensor 28 is arranged in the contact area of the load of the second leg 6, a first sensor 27 and in the contact region of the vertical leg 7, a second sensor 28 is arranged.
- the two sensors 27, 28 are electrically connected to the control device 14, which only then generates a signal for actuating the electric motor 10 for the purpose of driving the safety cam 16 to the respective load when both sensors 27, 28 have issued a corresponding signal.
- the safety cam 16 is connected to a third sensor 29, which generates a signal when approaching the respective load, which signal is forwarded to the control device 14 and causes a shutdown of the electric motor 10.
- the safety cam of the coil still a distance of e.g. 1 cm.
- the first indicator light for example, a green color
- the second indicator light have a yellow color.
- two limit switches 32, 33 are provided in the region of the ends of the spindle 13 of the first adjusting drive 9, which cause a shutdown of the electric motor 10 upon reaching the ends of the predetermined adjustment path of the suspension device 3.
- the safety cam 16 may initially be in its rest position, i. in its recessed (e.g., retracted) position on the left side of the second leg 6, looking at Figures 1 and 2.
- the limit switch 32 In this position, the limit switch 32 is approached.
- the first and second legs 2, 6 are aligned substantially horizontally. This condition is indicated by the green indicator light 30 lighting up to the crane operator. By contrast, the yellow indicator light 31 remains dark in this hooked position.
- the crane operator moves the C-hook 1 in such a way that the second leg 6 is guided through the ring eye 35 of the corresponding coil 5.
- the yellow indicator light 31 lights up Green indicator light 30 remains dark during this process. The crane operator thus knows that the coil 5 is correctly positioned on the second leg 6.
- the safety cam 16 begins the closing operation of the safety cam 16 and thus also the displacement of the suspension device 3 with the counterweights 8.
- the safety cam from the inside of the second leg is first folded up so that it projects, for example 4 cm above the load receiving surface 26, and then along of the second leg 6 is displaced in the direction of the coil 5.
- the safety cam 16 shifted so far that the third sensor 29 reaches the coil 5 and the electric motor 10 turns off, lights in addition to the yellow indicator light 31 and the green indicator light 30 on.
- the connected to the coil 5 C-hook 1 is now balanced, and by the safety cam 16 slipping out of the coil 5 is prevented from the C-hook 1, so that the coil 5 can now be raised.
- the floating coil 5 can be discontinued after reaching the storage location at this. If the coil 5 on the appropriate surface (soil, pallet, etc.), so the second leg 6 lowers slightly below its previous position within the ring eye 35, whereby the first sensor 27 is released and the crane operator switches to opening. As a result, both the safety cam 16 and the suspension device 3 with the counterweight 8 are moved back into their rest positions, and an extension of the C-hook 1 from the coil 5 is easily possible because the C-hook is again in a balanced state.
- FIGS 3 and 4 show perspective views of the C-hook 1 according to the invention with loads 5 different width, the C-hook 1 is balanced by a corresponding displacement of the safety cam 16 and thus the suspension device 3 and the counterweight 8.
- the invention is not limited to the embodiment described above.
- hydraulic drives can be used instead of the spindle drives.
- the intermediate gear can also be, for example, a manual transmission in order to adapt the translation of the adjustment speeds of securing cams and counterweight to the different materials of the loads, etc.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Control And Safety Of Cranes (AREA)
- Jib Cranes (AREA)
- Hooks, Suction Cups, And Attachment By Adhesive Means (AREA)
Abstract
Description
- Die Erfindung betrifft einen C-Haken mit automatischem Gewichtsausgleich gemäß der Präambel des Anspruchs 1.
- C-Haken werden üblicherweise zur Aufnahme und zum Transport von ringförmigen Lasten, wie Coils, Rollen, Ringe, Buchsen und dergleichen, benutzt. Sie besitzen einen bei ihrer bestimmungsgemäßen Verwendung im wesentlichen waagerechten oberen (ersten) Schenkel, an dem eine Aufhängeeinrichtung vorgesehen ist, in welche beispielsweise der Lasthaken eines Kranes eingreift und einen im wesentlichen ebenfalls waagerechten unteren (zweiten) Schenkel, der auch als Tragarm oder Lastaufnahmedorn etc. bezeichnet wird, zur Aufnahme und zum Transport der ringförmigen Lasten.
- Um die mit unterschiedlichen Coilgrößen verbundenen unterschiedlichen Traglasten mit dem gleichen C-Haken transportieren zu können, ist es bekannt, Kontergewichte auf dem oberen Schenkel des C-Hakens anzuordnen, so daß die Lage des durch den C-Haken und die Last sich ergebenden Schwerpunktes derart gewählt werden kann, daß der zweite Schenkel bei der Aufnahme und dem Transport der Last jeweils einen im wesentlichen waagerechten Verlauf aufweist. Nachteilig ist bei derartigen C-Haken allerdings, daß die Kontergewichte manuell ausgetauscht werden müssen.
- Es sind ferner C-Haken bekannt, bei denen an dem ersten Schenkel eine mit einem Kontergewicht verbundene Aufhängeeinrichtung vorgesehen ist, die mittels eines ersten Verstellantriebes axial entlang des ersten Schenkels verschiebbar angeordnet ist. Durch die axiale Verschiebbarkeit der Aufhängeeinrichtung mit dem Kontergewicht kann der C-Haken so austariert werden, daß sich sein zweiter Schenkel sowohl im unbelasteten als auch im belasteten Zustand im wesentlichen horizontal ausrichtet. Dabei wird das Austarieren über Neigungssensoren gesteuert.
- Nachteilig ist bei derartigen bekannten C-Haken allerdings, daß das Austarieren relativ zeitaufwendig ist, weil eine Annäherung an eine günstige Lage erst allmählich erreicht werden kann, da bei jedem Verstellvorgang die Last pendelt und zur Beruhigung eine gewisse Zeit benötigt.
- Der Erfindung liegt die Aufgabe zugrunde, einen C-Haken mit automatischem Gewichtsausgleich anzugeben, mit dem Lasten unterschiedlicher Abmessungen aufgenommen und sicher transportiert werden können, ohne daß ein zeitaufwendiger Tariervorgang erforderlich ist.
- Diese Aufgabe wird erfindungsgemäß durch die Merkmale des Anspruchs 1 gelöst. Weitere, besonders vorteilhafte Ausgestaltungen der Erfindung offenbaren die Unteransprüche.
- Die Erfindung beruht im wesentlichen auf dem Gedanken, an dem zweiten Schenkel ein die jeweilige Last von dem freien Ende des zweiten Schenkels aus sichernder Sicherungsnocken vorzusehen, der mittels eines mit dem ersten Verstellantrieb über ein Zwischengetriebe verbundenen zweiten Verstellantriebes axial entlang des zweiten Schenkels verschiebbar ist, derart, daß eine Verschiebung des Sicherungsnockens zur Sicherung der Last eine gleichgerichtete Verschiebung der Aufhängeeinrichtung mit dem Kontergewicht bewirkt.
- Durch diese gleichzeitige Verschiebung von Sicherungsnocken und Aufhängeeinrichtung mit den Kontergewichten wird eine Schwerpunktsverlagerung des C-Hakens erreicht, derart, daß beim anschließenden Anheben der Last diese sich schon von vornherein in etwa horizontal aushängt, so daß es im Kranbetrieb zügig zu einem sicheren Transport der Last kommt.
- Zur Betätigung der beiden über ein Zwischengetriebe miteinander verbundenen Verstell-antrieben ist vorzugsweise ein von einer Steuereinrichtung betätigbarer Elektromotor vorgesehen. Dabei kann zwischen dem Elektromotor und dem ersten Verstellantrieb eine Rutschkupplung vorgesehen sein, um den Elektromotor vor Überlastungen zu schützen.
- Bei den beiden Verstellantrieben handelt es sich vorzugsweise um selbsthemmende Spindelantriebe, wobei die Spindel des ersten Verstellantriebes mit einer ersten Spindelmutter zusammenwirkt, welche mit der Aufhängevorrichtung und/oder dem Kontergewicht verbunden ist, und wobei die Spindel des zweiten Verstellantriebes mit einer zweiten Spindelmutter zusammenwirkt, welche mit dem Sicherungsnocken verbunden ist.
- Das Zwischengetriebe umfaßt vorteilhafterweise ein Kettengetriebe, bei dem die Kette über Kettenräder geführt wird, die an einem den ersten Schenkel und den zweiten Schenkel verbindenden vertikalen Schenkel des C-Hakens angeordnet sind.
- Damit der Sicherungsnocken die Aufnahme einer Last nicht behindert, ist dieser in seiner Ruhestellung vorzugsweise in dem zweiten Schenkel versenkbar angeordnet, derart, daß er zur Aufnahme der Last unter die Lastaufnahmefläche des zweiten Schenkels in seiner versenkten Position verbleibt und erst nach Aufnahme der Last zu deren Sicherung aus dem zweiten Schenkel herausragt.
- Als besonders vorteilhaft hat es sich erwiesen, wenn ein Anheben der Last mit dem C-Haken erst erfolgt, wenn sichergestellt ist, daß die Last sich am vertikalen Schenkel des C-Hakens abstützt und somit der Lastschwerpunkt möglich weit nach hinten hin verlagert ist. Denn in diesem Fall ist die Gefahr einer Schräglage wie auch eines damit verbundenen Ausschwingens wesentlich eingeschränkt, wenn sich gleichzeitig auch die Lage der Aufhängung entsprechend verlagert.
- Bei einer Ausführungsform der Erfindung ist daher vorgesehen, daß ein erster Sensor im Auflagebereich der Last des zweiten Schenkels und ein zweiter Sensor im Anlagebereich des vertikalen Schenkels angeordnet ist, wobei die beiden Sensoren elektrisch mit der Steuereinrichtung verbunden sind, die erst dann ein Signal zur Betätigung der Verstellantriebe zwecks Beifahrens des Sicherungsnockens an die Last erzeugt, wenn beide Sensoren ein entsprechendes Signal abgegeben haben.
- Vorteilhafterweise ist der Sicherungsnocken mit einem dritten Sensor verbunden, der bei Annäherung oder Berührung der Last ein Signal erzeugt, welches an die Steuereinrichtung weitergeleitet wird und ein Abschalten der Verstellantriebe bewirkt.
- Zur Überwachung der Endstellungen des vorgegebenen Verstellweges der Aufhängeeinrichtung sind Endschalter vorgesehen, die ein Abschalten der Verstellantriebe bei Erreichen der Endstellungen bewirken.
- Um beispielsweise dem Kranführer anzuzeigen, ob der Sicherungsnocken sich in seiner versenkten Position oder in seiner an die Last herangefahrenen Position befindet, hat es sich als vorteilhaft erwiesen, auf dem ersten Schenkel des C-Hakens mit der Steuereinrichtung verbundene Meldeleuchten unterschiedlicher Farben gut sichtbar anzuordnen.
- Weitere Einzelheiten und Vorteile der Erfindung ergeben sich aus den folgenden anhand von Figuren erläuterten Ausführungsbeispielen. Es zeigen:
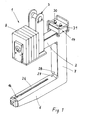
- Fig.1
- eine perspektivische Ansicht eines erfindungsgemäßen C-Hakens;
- Fig.2
- einen Längsschnitt durch den in Fig.1 dargestellten C-Haken;
- Fig.3 und 4
- perspektivische Ansichten des in Fig.1 dargestellten C-Hakens, auf dem Lasten unterschiedlicher Breite angeordnet sind.
- In den Fig.1-4 ist mit 1 ein erfindungsgemäßer C-Haken mit automatischem Gewichtsausgleich bezeichnet. Der C-Haken 1 besteht aus einem ersten (oberen) Schenkel 2, an dem eine Aufhängeeinrichtung 3 zur Aufnahme des Lasthakens 4 eines nicht dargestellten Kranes angeordnet ist, einem zur Aufnahme von ringförmigen Lasten 5 bestimmten, im wesentlichen waagerechten zweiten (unteren) Schenkel 6 und einem die beiden Schenkel 2 und 6 verbindenden vertikalen Schenkel 7.
- Die Aufhängeeinrichtung 3 ist mit einem Kontergewicht 8 verbunden, welches zusammen mit der Aufhängeeinrichtung 3 axial entlang des ersten Schenkels 2 verschiebbar angeordnet ist. Dabei ist zur Verschiebung des Kontergewichtes 8 ein als Spindelantrieb ausgebildeter erster Verstellantrieb 9 vorgesehen. Dieser wird von einem Elektromotor 10 (im dargestellten Fall ein Stirnradgetriebemotor) angetrieben, welcher über eine Rutschkupplung 11 und ein Kettengetriebe 12 auf die Spindel 13 des Spindelantriebes 9 wirkt und von einer auf dem ersten Schenkel 2 befindlichen Steuereinrichtung 14 mit Strom versorgt wird. Die Spindel 13 des ersten Verstellantriebes 9 wirkt mit einer ersten Spindelmutter 15 zusammen, welche mit der Aufhängeeinrichtung 3 verbunden ist.
- An dem zweiten Schenkel 6 ist ein die jeweilige Last sichernder Sicherungsnocken 16 vorgesehen. Der Sicherungsnocken 16 ist mittels eines ebenfalls als Spindelantrieb ausgebildeten zweiten Verstellantriebes 17 von einer Ruheposition, bei der er sich am freien äußeren Ende 18 des zweiten Schenkels 6 befindet, in eine geschlossene Position, bei der er sich in der Nähe des vertikalen Schenkels 7 befindet, axial entlang des zweiten Schenkels 6 verschiebbar angeordnet. Dabei betätigt die Spindel 25 des zweiten Spindelantriebes 17 eine zweite Spindelmutter 34, die an einem Unterteil des Sicherungsnockens 16 befestigt ist.
- Erfindungsgemäß ist der zweite Spindelantrieb 17 über ein Zwischengetriebe 19 mit dem ersten Verstellantrieb 9 verbunden, derart, daß eine Verschiebung des Sicherungsnockens 16 zur Sicherung der jeweiligen Last mittels des Motors 10 eine gleichgerichtete Verschiebung der Aufhängeeinrichtung 3 mit dem Kontergewicht 8 bewirkt.
- Das Zwischengetriebe 19 setzt sich bei dem dargestellten Ausführungsbeispiel aus zwei Teilgetrieben 20, 21 zusammen. Dabei handelt es sich bei dem ersten Teilgetriebe 20 um ein Zahnradgetriebe, welches über eine Kupplung 22 mit der Spindel 13 des ersten Spindelantriebes 9 verbunden ist. Bei dem zweiten Teilgetriebe 21 handelt es sich um ein dem Zahnradgetriebe 20 nachgeschaltetes Kettengetriebe. Dabei ist bei einem praktischen Ausführungsbeispiel die Getriebeübersetzung des Zahnradgetriebes 20 derart gewählt, daß bei einer Verstellgeschwindigkeit der Aufhängeeinrichtung 3 von 2,6 m/min die Verstellgeschwindigkeit des Sicherungsnockens 16 ca. 8 m/min beträgt.
- Bei dem Kettengetriebe 21 wird die Kette 23 über Kettenräder 24 geführt, die sowohl an den jeweils einander zugewandten Enden der Spindeln 13, 25 der beiden Verstellantriebe 9, 17 als auch an dem vertikalen Schenkel 7 des C-Hakens 1 angeordnet sind.
- Der Sicherungsnocken 16 ist in seiner Ruheposition unter die Lastaufnahmefläche 26 des zweiten Schenkels 6 versenkt angeordnet, so daß bei der Aufnahme einer Last der Sicherungsnocken 16 diese nicht behindert. Hierzu können der Sicherungsnocken 16 oder ein mit dem Sicherungsnocken verbundener Träger mit der zweiten Spindelmutter 34 über ein Gelenk verbunden sein, so daß der Sicherungsnocken kurz vor Erreichen seiner Ruheposition z.B. durch eine entsprechende Führung unter die Lastaufnahmefläche 26 gedrückt wird.
- Im Auflagebereich der Last des zweiten Schenkels 6 ist ein erster Sensor 27 und im Anlagebereich des vertikalen Schenkels 7 ist ein zweiter Sensor 28 angeordnet. Die beiden Sensoren 27, 28 sind elektrisch mit der Steuereinrichtung 14 verbunden, welche erst dann ein Signal zur Betätigung des Elektromotors 10 zwecks Beifahrens des Sicherungsnockens 16 an die jeweilige Last erzeugt, wenn beide Sensoren 27, 28 ein entsprechendes Signal abgegeben haben.
- Außerdem ist der Sicherungsnocken 16 mit einem dritten Sensor 29 verbunden, der bei Annäherung an die jeweilige Last ein Signal erzeugt, welches an die Steuereinrichtung 14 weitergeleitet wird und ein Abschalten des Elektromotors 10 bewirkt. Dabei kann der Sicherungsnocken von dem Coil noch einen Abstand von z.B. 1 cm aufweisen.
- Auf der elektrischen Steuereinrichtung 14 sind zwei mit der Steuereinrichtung 14 elektrisch verbundene Meldeleuchten 30, 31 angeordnet, die optisch anzeigen, ob der Sicherungsnocken 16 sich in seiner (versenkten) Ruheposition oder in seiner an die Last herangefahrenen Position befindet. Dabei kann die erste Meldeleuchte beispielsweise eine grüne Farbe und die zweite Meldeleuchte eine gelbe Farbe aufweisen.
- Außerdem sind zwei Endschalter 32, 33 im Bereich der Enden der Spindel 13 des ersten Verstellantriebes 9 vorgesehen, die ein Abschalten des Elektromotors 10 bei Erreichen der Enden des vorgegebenen Verstellweges der Aufhängeeinrichtung 3 bewirken.
- Nachfolgend wird auf die Funktionsweise des erfindungsgemäßen C-Hakens 1 eingegangen. Dabei möge sich der Sicherungsnocken 16 zunächst in seiner Ruheposition befinden, d.h. in seiner versenkten (z.B. eingeklappten) Position auf der linken Seite des zweiten Schenkels 6, wenn man die Fig.1 und 2 betrachtet.
- In dieser Position ist der Endschalter 32 angefahren. Der erste und zweite Schenkel 2, 6 sind im wesentlichen horizontal ausgerichtet. Dieser Zustand wird durch Aufleuchten der grünen Meldeleuchte 30 dem Kranführer angezeigt. Hingegen bleibt die gelbe Meldeleuchte 31 in dieser Hakenstellung dunkel.
- Soll nun ein Coil 5 (vgl. Fig.3 und 4) aufgenommen und transportiert werden, so bewegt der Kranführer den C-Haken 1 derart, daß der zweite Schenkel 6 durch das Ringauge 35 des entsprechenden Coils 5 geführt wird. Sobald das Coil 5 sowohl an dem vertikalen Schenkel 7 des C-Hakens 1 anliegt als auch auf der Lastaufnahmefläche 26 des zweiten Schenkels 6 aufliegt, was durch den ersten und zweiten Sensor 27, 28 detektiert wird, erfolgt ein Aufleuchten der gelben Meldeleuchte 31. Die grüne Meldeleuchte 30 bleibt bei diesem Vorgang dunkel. Der Kranfahrer weiß somit, daß das Coil 5 korrekt auf dem zweiten Schenkel 6 positioniert ist.
- Nun beginnt der Schließvorgang des Sicherungsnockens 16 und damit auch die Verschiebung der Aufhängeeinrichtung 3 mit den Kontergewichten 8. Dabei wird zunächst der Sicherungsnocken aus dem Inneren des zweiten Schenkels nach oben geklappt, so daß er z.B. 4 cm über die Lastaufnahmefläche 26 ragt, und dann entlang des zweiten Schenkels 6 in Richtung auf das Coil 5 verschoben. Ist der Sicherungsnocken 16 so weit verschoben, daß der dritte Sensor 29 das Coil 5 erreicht und den Elektromotor 10 abschaltet, leuchtet zusätzlich zur gelben Meldeleuchte 31 auch die grüne Meldeleuchte 30 auf. Der mit dem Coil 5 verbundene C-Haken 1 ist nun austariert, und durch den Sicherungsnocken 16 wird ein Herausrutschen des Coils 5 aus dem C-Haken 1 verhindert, so daß das Coil 5 nun angehoben werden kann.
- Das schwebende Coil 5 kann nach Erreichen des Ablageortes an diesem abgesetzt werden. Liegt das Coil 5 auf der entsprechenden Unterlage (Erdboden, Palette etc.) auf, so senkt sich der zweite Schenkel 6 noch etwas unter seine vorherige Position innerhalb des Ringauges 35 ab, wodurch der erste Sensor 27 frei wird und der Kranführer auf Öffnen schaltet. Dadurch wird sowohl der Sicherungsnocken 16 als auch die Aufhängeeinrichtung 3 mit dem Kontergewicht 8 in ihre Ruhepositionen zurückbewegt, und ein Ausfahren des C-Hakens 1 aus dem Coil 5 ist problemlos möglich, da sich der C-Haken wiederum in einem austarierten Zustand befindet.
- Die Fig.3 und 4 zeigen perspektivische Ansichten des erfindungsgemäßen C-Hakens 1 mit Lasten 5 unterschiedlicher Breite, wobei der C-Haken 1 durch entsprechende Verschiebung des Sicherungsnockens 16 und damit der Aufhängeeinrichtung 3 und des Kontergewichtes 8 austariert ist.
- Die Erfindung ist selbstverständlich nicht auf das vorstehend beschriebene Ausführungsbeispiel beschränkt. So können statt der Spindelantriebe beispielsweise auch hydraulische Antriebe verwendet werden. Bei dem Zwischengetriebe kann es sich beispielsweise auch um ein Schaltgetriebe handeln, um die Übersetzung der Verstellungsgeschwindigkeiten von Sicherungsnocken und Kontergewicht den unterschiedlichen Materialien der Lasten anzupassen etc.
- Außerdem kann vorgesehen sein, eine dem Motor nachgeschaltete Schaltkupplung vorzusehen, welche zur Betätigung der Verstellantriebe durch die Steuereinrichtung geschaltet wird.
- Ferner kann auch auf das Absenken des Sicherungsnockens unter die Lastaufnahmefläche des zweiten Schenkels verzichtet werden, wenn sichergestellt wird, daß der zweite Schenkel des C-Hakens bei der Aufnahme und Ablage der jeweiligen Last einen entsprechenden Sicherheitsabstand zur inneren Oberfläche der Last aufweist.
-
- 1
- C-Haken
- 2
- (erster) Schenkel
- 3
- Aufhängeeinrichtung
- 4
- Lasthaken
- 5
- Last, Coil
- 6
- (zweiter) Schenkel
- 7
- vertikaler Schenkel
- 8
- Kontergewicht
- 9
- (erster) Verstellantrieb, Spindelantrieb
- 10
- Elektromotor, Motor
- 11
- Rutschkupplung
- 12
- Kettengetriebe
- 13
- Spindel
- 14
- Steuereinrichtung
- 15
- (erste) Spindelmutter
- 16
- Sicherungsnocken
- 17
- (zweiter) Verstellantrieb, Spindelantrieb
- 18
- äußere Ende
- 19
- Zwischengetriebe
- 20
- (erste) Teilgetriebe, Zahnradgetriebe
- 21
- (zweite) Teilgetriebe, Kettengetriebe
- 22
- Kupplung
- 23
- Kette
- 24
- Kettenrad
- 25
- Spindel
- 26
- Lastaufnahmefläche
- 27
- erster Sensor
- 28
- zweiter Sensor
- 29
- dritter Sensor
- 30, 31
- Meldeleuchten
- 32,33
- Endschalter
- 34
- (zweite) Spindelmutter
- 35
- Ringauge
Claims (12)
- C-Haken mit automatischem Gewichtsausgleich, der mindestens einen ersten Schenkel (2), an dem eine Aufhängeeinrichtung (3) angeordnet ist, und mindestens einen zur Aufnahme von ringförmigen Lasten (5) bestimmten zweiten Schenkel (6) umfaßt, mit den Merkmalen:a) die Aufhängeeinrichtung (3) ist mit einem Kontergewicht (8) verbunden, welches zusammen mit der Aufhängeeinrichtung (3) axial entlang des ersten Schenkels (2) verschiebbar angeordnet ist;b) zur Verschiebung der Aufhängeeinrichtung (3) mit dem Kontergewicht (8) ist ein erster Verstellantrieb (9) vorgesehen, der mit einem von einer Steuereinrichtung (14) betätigbaren Motor (10) in Wirkverbindung steht;c) an dem zweiten Schenkel (6) ist ein die jeweilige Last (5) von dem freien Ende des zweiten Schenkels (6) aus sichernder Sicherungsnocken (16) vorgesehen;d) der Sicherungsnocken (16) ist mittels eines zweiten Verstellantriebes (17) axial entlang des zweiten Schenkels (6) verschiebbar;e) der zweite Verstellantrieb (17) ist über mindestens ein Zwischengetriebe (19) mit dem ersten Verstellantrieb (9) verbunden, derart, daß eine Verschiebung des Sicherungsnockens (16) zur Sicherung der Last (5) mittels des Motors (10) eine gleichgerichtete Verschiebung der Aufhängeeinrichtung (3) mit dem Kontergewicht (8) bewirkt.
- C-Haken nach Anspruch 1, dadurch gekennzeichnet, daß es sich bei dem Motor (10) um einen Elektromotor handelt.
- C-Haken nach Anspruch 1 oder 2, dadurch gekennzeichnet, daß der Motor (10) und der erste Verstellantrieb (9) über eine Rutschkupplung (11) miteinander verbunden sind.
- C-Haken nach einem der Ansprüche 1 bis 3, dadurch gekennzeichnet, daß es sich bei dem ersten Verstellantrieb (9) und bei dem zweiten Verstellantrieb (17) jeweils um einen Spindelantrieb handelt, wobei die Spindel (13) des ersten Verstellantriebes (9) mit einer ersten Spindelmutter (15) zusammenwirkt, welche mit der Aufhängeeinrichtung (3) und/oder dem Kontergewicht (8) verbunden ist, und wobei die Spindel (25) des zweiten Verstellantriebes (17) mit einer zweiten Spindelmutter (34) zusammenwirkt, welche mit dem Sicherungsnocken (16) verbunden ist.
- C-Haken nach Anspruch 4, dadurch gekennzeichnet, daß die beiden Spindelantriebe (9, 17) selbsthemmend ausgebildet sind.
- C-Haken nach einem der Ansprüche 1 bis 5, dadurch gekennzeichnet, daß das Zwischengetriebe (19) mindestens ein Kettengetriebe (21) umfaßt, bei dem eine Kette (23) über Kettenräder (24) geführt ist, die an einem den ersten Schenkel (2) und den zweiten Schenkel (6) verbindenden vertikalen Schenkel (7) des C-Hakens (1) angeordnet sind.
- C-Haken nach einem der Ansprüche 1 bis 6, dadurch gekennzeichnet, daß der Sicherungsnocken (16) in dem zweiten Schenkel (6) versenkbar angeordnet ist, derart, daß er zur Aufnahme der Last (5) unter die Lastaufnahmefläche (26) des zweiten Schenkels (6) versenkbar ist und nach Aufnahme der Last (5) zu deren Sicherung aus dem zweiten Schenkel (6) herausbewegbar ist.
- C-Haken nach einem der Ansprüche 1 bis 7, dadurch gekennzeichnet, daß ein erster Sensor (27) im Last-Auflagebereich des zweiten Schenkels (6) und ein zweiter Sensor (28) im Last-Anlagebereich des vertikalen Schenkels (7) angeordnet ist, daß die beiden Sensoren (27, 28) elektrisch mit der Steuereinrichtung (14) verbunden sind, und daß die Steuereinrichtung (14) erst dann ein Signal zur Betätigung der Verstellantriebe (9, 17) zwecks Beifahrens des Sicherungsnockens (16) an die Last (5) erzeugt, wenn beide Sensoren (27, 28) ein entsprechendes Signal abgegeben haben.
- C-Haken nach einem der Ansprüche 1 bis 7, dadurch gekennzeichnet, daß der Sicherungsnocken (16) mit einem dritten Sensor (29) verbunden ist, der bei axialer Annäherung oder Berührung der Last (5) ein Signal erzeugt, welches an die Steuereinrichtung (14) weitergeleitet wird und ein Abschalten der Verstellantriebe (9, 17) bewirkt.
- C-Haken nach einem der Ansprüche 1 bis 9, dadurch gekennzeichnet, daß Endschalter (32, 33) vorgesehen sind, die ein Abschalten der Verstellantriebe (9, 17) bei Erreichen der Enden eines vorgegebenen Verstellweges der Aufhängeeinrichtung (3) bewirken.
- C-Haken nach einem der Ansprüche 1 bis 10, dadurch gekennzeichnet, daß die Steuereinrichtung (14) an dem ersten Schenkel (2) des. C-Hakens (1) angeordnet ist.
- C-Haken nach einem der Ansprüche 1 bis 11, dadurch gekennzeichnet, daß gut sichtbar auf dem ersten Schenkel (2) des C-Hakens (1) mit der Steuereinrichtung (14) verbundene Meldeleuchten (30, 31) unterschiedlicher Farben angeordnet sind, die optisch anzeigen, ob der Sicherungsnocken (16) sich in seiner versenkten Ruheposition oder in seiner an die Last (5) herangefahrenen Position befindet.
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE200610010848 DE102006010848A1 (de) | 2006-03-09 | 2006-03-09 | C-Haken mit automatischem Gewichtsausgleich |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP1832544A2 true EP1832544A2 (de) | 2007-09-12 |
| EP1832544A3 EP1832544A3 (de) | 2009-11-04 |
Family
ID=38110459
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP07004720A Withdrawn EP1832544A3 (de) | 2006-03-09 | 2007-03-07 | C-Haken mit automatischem Gewichtsausgleich |
Country Status (2)
| Country | Link |
|---|---|
| EP (1) | EP1832544A3 (de) |
| DE (1) | DE102006010848A1 (de) |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104340858A (zh) * | 2013-08-09 | 2015-02-11 | 无锡仁爱精密带钢有限公司 | 一种吊装带钢用挂钩 |
| CN105836593A (zh) * | 2016-04-12 | 2016-08-10 | 上海市基础工程集团有限公司 | 适用于细长构件的开口式吊装夹具及施工方法 |
| WO2017000023A1 (en) * | 2015-06-28 | 2017-01-05 | David Reid | A load-engaging apparatus for suspending a load to a lifting gear |
| CN111115437A (zh) * | 2019-12-21 | 2020-05-08 | 衢州学院 | 一种卷材起重吊具 |
| JP2020111437A (ja) * | 2019-01-11 | 2020-07-27 | Jfeスチール株式会社 | Cフック吊り具およびこれを用いた搬送方法 |
| CN113351682A (zh) * | 2020-04-21 | 2021-09-07 | 广州优尼冲压有限公司 | 落料机自动上卷系统 |
| CN116788977A (zh) * | 2023-07-19 | 2023-09-22 | 莱芜钢铁集团银山型钢有限公司 | 一种c型钩安全限位装置及其控制方法 |
| DE102022108434A1 (de) | 2022-04-07 | 2023-10-12 | EnBW Energie Baden-Württemberg AG | Handhabungswerkzeug zur Handhabung eines Transformators und Verfahren zur Handhabung eines Transformators |
| CN120208081A (zh) * | 2025-05-07 | 2025-06-27 | 山东龙辉起重机械有限公司 | 一种具有智能监测控制功能的起重吊具 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06219679A (ja) | 1993-01-25 | 1994-08-09 | Nakayama Steel Works Ltd | マルチバランスポーター |
| JPH1087263A (ja) | 1996-09-18 | 1998-04-07 | Kawamura Kogyo Kk | 物品吊り具 |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102005024671B4 (de) * | 2005-05-30 | 2010-01-28 | Wimo Hebetechnik Gmbh | Coilhaken |
-
2006
- 2006-03-09 DE DE200610010848 patent/DE102006010848A1/de not_active Withdrawn
-
2007
- 2007-03-07 EP EP07004720A patent/EP1832544A3/de not_active Withdrawn
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06219679A (ja) | 1993-01-25 | 1994-08-09 | Nakayama Steel Works Ltd | マルチバランスポーター |
| JPH1087263A (ja) | 1996-09-18 | 1998-04-07 | Kawamura Kogyo Kk | 物品吊り具 |
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104340858A (zh) * | 2013-08-09 | 2015-02-11 | 无锡仁爱精密带钢有限公司 | 一种吊装带钢用挂钩 |
| WO2017000023A1 (en) * | 2015-06-28 | 2017-01-05 | David Reid | A load-engaging apparatus for suspending a load to a lifting gear |
| CN105836593A (zh) * | 2016-04-12 | 2016-08-10 | 上海市基础工程集团有限公司 | 适用于细长构件的开口式吊装夹具及施工方法 |
| JP2020111437A (ja) * | 2019-01-11 | 2020-07-27 | Jfeスチール株式会社 | Cフック吊り具およびこれを用いた搬送方法 |
| JP7056589B2 (ja) | 2019-01-11 | 2022-04-19 | Jfeスチール株式会社 | Cフック吊り具およびこれを用いた搬送方法 |
| CN111115437A (zh) * | 2019-12-21 | 2020-05-08 | 衢州学院 | 一种卷材起重吊具 |
| CN113351682A (zh) * | 2020-04-21 | 2021-09-07 | 广州优尼冲压有限公司 | 落料机自动上卷系统 |
| CN113351682B (zh) * | 2020-04-21 | 2025-03-25 | 广州优尼冲压有限公司 | 落料机自动上卷系统 |
| DE102022108434A1 (de) | 2022-04-07 | 2023-10-12 | EnBW Energie Baden-Württemberg AG | Handhabungswerkzeug zur Handhabung eines Transformators und Verfahren zur Handhabung eines Transformators |
| CN116788977A (zh) * | 2023-07-19 | 2023-09-22 | 莱芜钢铁集团银山型钢有限公司 | 一种c型钩安全限位装置及其控制方法 |
| CN120208081A (zh) * | 2025-05-07 | 2025-06-27 | 山东龙辉起重机械有限公司 | 一种具有智能监测控制功能的起重吊具 |
| CN120208081B (zh) * | 2025-05-07 | 2025-12-23 | 山东龙辉起重机械有限公司 | 一种具有智能监测控制功能的起重吊具 |
Also Published As
| Publication number | Publication date |
|---|---|
| DE102006010848A1 (de) | 2007-09-13 |
| EP1832544A3 (de) | 2009-11-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1832544A2 (de) | C-Haken mit automatischem Gewichtsausgleich | |
| DE4109888A1 (de) | Vorrichtung zur halterung und fuehrung einer achse oder welle oder eines lagerrings | |
| DE102012103515A1 (de) | Steuerverfahren für ein Balancier-Hebezeug und Balancier-Hebezeug hiermit | |
| DE2902116A1 (de) | Vorrichtung zum austausch des regelstab-antriebs in einem kernreaktor | |
| EP3216920A1 (de) | Förderer und baumaschine mit einem förderer | |
| DE3137964A1 (de) | In zwei richtungen verlaengerbare kranlaufkatze | |
| DE3917545A1 (de) | Vorrichtung und verfahren zum wenden von lasten | |
| DE3013697C2 (de) | ||
| WO2014166574A1 (de) | Kran sowie verfahren zur prüfung der verseilung eines solchen krans | |
| EP2708486A1 (de) | Hebevorrichtung für eine Kabeltrommel | |
| DE202010008450U1 (de) | Handhabungsgerät für Spaltbandringe | |
| DE1801343A1 (de) | Laufkran fuer Giesstiegel | |
| DE102020113081B4 (de) | Greifvorrichtung mit Schließantrieb durch übersetzte Kraftvervielfältigung | |
| EP0983899B1 (de) | Ladevorrichtung zum Be- und Entladen eines Fahrzeuges | |
| DE9418696U1 (de) | Vorrichtung zum Anheben und Entleeren von Recyclingbehältern | |
| DE102004061182A1 (de) | Scherenhubtisch | |
| DE590684C (de) | Hebebuehne, insbesondere fuer Kraftfahrzeuge | |
| DE102005012227A1 (de) | Scherenhubtisch | |
| WO1992012084A1 (de) | Schiffsbe- oder -entlader | |
| DE933679C (de) | Vorrichtung, die dem Verkehr mit dem Schiff dient | |
| DE102015215416A1 (de) | Bohranlage und Verfahren zum Betrieb einer Bohranlage sowie Transportrahmen zur Verwendung auf einer Bohranlage oder in einem Verfahren zum Betrieb einer Bohranlage | |
| DE699423C (de) | Einrichtung zur Sicherung eines Kranes mit veraenderlicher Ausladung gegen das UEberschreiten des zulaessigen Lastmomentes | |
| DE19701815A1 (de) | Fahrzeugaufbau für Wechselbehälter | |
| DE1937620C (de) | Vorrichtung für die Belastung eines Krans | |
| DE2101429A1 (de) | Hebe- und Transportvorrichtung für beladene oder unbeladene Transportpaletten |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A2 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IS IT LI LT LU LV MC MT NL PL PT RO SE SI SK TR |
|
| AX | Request for extension of the european patent |
Extension state: AL BA HR MK YU |
|
| PUAL | Search report despatched |
Free format text: ORIGINAL CODE: 0009013 |
|
| AK | Designated contracting states |
Kind code of ref document: A3 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IS IT LI LT LU LV MC MT NL PL PT RO SE SI SK TR |
|
| AX | Request for extension of the european patent |
Extension state: AL BA HR MK RS |
|
| AKX | Designation fees paid |
Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IS IT LI LT LU LV MC MT NL PL PT RO SE SI SK TR |
|
| RIN1 | Information on inventor provided before grant (corrected) |
Inventor name: GEISEN, BERTHOLD, DIPL.-ING. |
|
| 17P | Request for examination filed |
Effective date: 20100819 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION IS DEEMED TO BE WITHDRAWN |
|
| 18D | Application deemed to be withdrawn |
Effective date: 20131001 |