EP1898087A2 - Piezoelektrischer Pumpenantrieb - Google Patents
Piezoelektrischer Pumpenantrieb Download PDFInfo
- Publication number
- EP1898087A2 EP1898087A2 EP07014364A EP07014364A EP1898087A2 EP 1898087 A2 EP1898087 A2 EP 1898087A2 EP 07014364 A EP07014364 A EP 07014364A EP 07014364 A EP07014364 A EP 07014364A EP 1898087 A2 EP1898087 A2 EP 1898087A2
- Authority
- EP
- European Patent Office
- Prior art keywords
- spring
- resonance
- piezoelectric
- drive according
- pump drive
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images









Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B17/00—Pumps characterised by combination with, or adaptation to, specific driving engines or motors
- F04B17/003—Pumps characterised by combination with, or adaptation to, specific driving engines or motors driven by piezoelectric means
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B45/00—Pumps or pumping installations having flexible working members and specially adapted for elastic fluids
- F04B45/04—Pumps or pumping installations having flexible working members and specially adapted for elastic fluids having plate-like flexible members, e.g. diaphragms
- F04B45/043—Pumps or pumping installations having flexible working members and specially adapted for elastic fluids having plate-like flexible members, e.g. diaphragms two or more plate-like pumping flexible members in parallel
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B45/00—Pumps or pumping installations having flexible working members and specially adapted for elastic fluids
- F04B45/04—Pumps or pumping installations having flexible working members and specially adapted for elastic fluids having plate-like flexible members, e.g. diaphragms
- F04B45/047—Pumps having electric drive
Definitions
- the invention relates to a piezoelectric pump drive, in particular for air pumps with a diaphragm as a pump organ, in which a resonant oscillation system which has at least one by means of a resonant spring resiliently mounted resonant mass and whose vibrations are generated by at least one electrically activated piezoelectric element, the pumping organ oscillatingly drives, said Piezo element is on the resonant spring provided with the resonance mass with the pump member in force and motion transmitting drive connection.
- a piezoelectrically actuable pump which has a piezoactuator, a pumping element, and an interposed, suitable for transmitting and amplifying the vibrations of the piezoactuator Has spring-mass system.
- the spring-mass system consists of two biased coaxially connected to each other in series springs and arranged between the springs and suspended from the springs oscillating mass.
- the excited by the piezo actuator via one of the springs longitudinal vibrations of the oscillating mass are transmitted to the pump member, so that the pump organ executes its pump strokes.
- the pump body itself is designed as a vibrating mass, which, however, may not be possible with a membrane as a pump organ.
- the working range of the piezoelectric actuator which lies in the range of ⁇ m, is used to stimulate the spring-mass system to vibrate. It should thus not only improved efficiency in the conversion of electrical energy into mechanical energy, but also a significant increase in the working stroke can be achieved.
- the oscillating mass requires a weight-bearing guide or bearing, which can not be realized without bearing friction.
- a bearing friction inhibits free swinging, so that such a spring-mass-vibration system does not swing freely and can easily fall out of step.
- the resonance effect which is intended to provide the mentioned improvements, is thus not easily guaranteed in this system.
- EP 1 593 847 A2 there is known a resonant pump system in which a resonant vibration system is provided for performing oscillating motions consisting of a vibrating spring connected to the resonant mass.
- an energy source in the form of a piezoelectric element is provided, which is connected via a transfer arm to the pumping element of a fluid pump.
- the piezoelectric element consists of a flat bar which works as a bender and is fixed in place with its one narrow end and at its other end carries the resonance mass or vibration mass.
- the restoring force used here is the inherent elasticity of the flat-rod-shaped piezo element.
- a pump organ there is provided a piston which is oscillating in a pump cylinder to move.
- piezoelectric elements are often also called piezoelectric actuators which, in order to achieve the greatest possible deflections, are often constructed as multilayer actuators ( Piezoceramics, Karl Ruschmeier, ISBN 3-8169-1152-8 ).
- the invention has for its object to provide a piezoelectric pump drive, in particular for air pumps with a membrane of the type mentioned above, to provide a simple and functionally reliable construction compared to the known much better performance in the situation and in different, the respective application needs optimally adaptable structural embodiments can be realized.
- the resonance spring may have the shape of a straight or curved rod or the shape of a band-shaped spring.
- the cross-sectional shape of the spring bar can be chosen arbitrarily in principle.
- rectangular and elliptical cross-sectional shapes may have certain advantages with respect to their oscillation properties compared to rotationally symmetrical, ie round or square, cross-sectional shapes.
- Under band-shaped springs are generally narrow, thin leaf springs to understand.
- the prerequisite for this effective mode of operation is that there is synchronicity between the working rhythm of the piezoelectric element operating, for example, with the mains frequency of 50 Hz and the natural oscillation of the oscillating system.
- a rod, leaf or band-shaped spring Compared to a helical compression spring as a resonant spring, the use of a rod, leaf or band-shaped spring has the advantage that it can virtually swing independently of position, ie in almost any position. With a helical compression spring, however, it is necessary that this vibrates at least approximately in a vertical position with the resonance mass and this carries. A bearing the weight of the resonance mass bearing or guide, which is fraught with bearing friction is not needed. The resonance oscillation can thus be influenced at most by the pumping forces to be applied.
- a leaf spring with sufficient width can ensure the swing of the resonant spring in a plane, so that no additional lateral guides are required.
- This vibration in a plane can also be achieved with rod springs and with band-shaped springs, if these are provided in at least two parallel arrangement as the resonance mass bearing resonance springs.
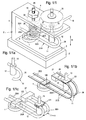
- the piezo elements 1 used preferably consist of multilayer actuators which are designed as stack actuators.
- a piezoelectric pump drive is shown schematically simplified, in which the from a lower horizontal leg 3, an upper horizontal leg 4 and the vertical connector. 5 existing frame 2 on a solid base 2 'is arranged, which gives the frame 2 the necessary stability and inertial mass to avoid natural vibration of the frame.
- a leaf spring 21 is provided in this embodiment, which is fixedly secured with one end 22 in the vertical connector 5 of the frame 2.
- this resonant spring 11 or leaf spring 21 is arranged so that it rests resiliently on the piezoelectric element 1 with a short lever arm 23.
- This is in turn arranged at a small distance from the vertical connecting piece 5 of the frame 2 on the lower horizontal leg 3, so that between the support point A and the clamped end 22 of the leaf spring 21 is a short lever arm 23.
- This leaf spring 21 is provided in this embodiment on the other side of the support point A with a longer lever arm 24, which includes the short lever arm 23 and which has a rearwardly bent end portion 25 to which a resonance mass 12 is attached to the underside.
- the end portion 25 is connected directly to a pump member 14 of a arranged on the horizontal leg 4 of the frame fluid pump 15.
- This fluid pump 15 has a horizontal outlet 16 through which the pumped fluid flows outwardly.
- a regulating spring 30 is provided, which is at a small distance from the support point A, at the the leaf spring 21 rests on the piezoelectric element 1, acts on the longer lever arm 24 of the leaf spring 21.
- the compressive force of this regulating spring 30 is adjustable and fixable by means of a seated in the upper horizontal leg 4 screw 29 with lock nut 28.
- This set screw 29 is provided at its lower end with a cylindrical receiving sleeve 33 in which the upper end of the regulating spring 30 is guided.
- the lower end of this regulating spring 30 is supported by a pressure piece 34 on the longer lever arm 24 of the leaf spring 21 so that the leaf spring 21 rests permanently on the piezoelectric element 1 under a certain prestress, that is to say resiliently.
- This embodiment of the piezoelectric pump drive according to the invention can be operated both in the working position shown in FIGS. 1 and 2.
- the working position is such that the leaf spring 21 assumes a vertical standing position, while it assumes a hanging vertical position in Fig. 2b. In these positions, the weight of the resonance mass 12 or balance mass 27 does not lie on the piezoelectric element 1.
- Figures 2a and 2b represent in this case each a top view from above.
- a bent bar spring 21/4 provided from round spring wire.
- This bar spring 21/4 is fixedly secured with one end 22/4 in the vertical connector 5 of the frame.
- the longer lever arm 24/4 which here also includes the short lever arm 23/4, has a rearwardly bent end portion 25/4, on which the resonance mass 12 is attached on the underside.
- the connected by the arc 26/4 with the longer lever arm 24/4 end portion 25/4 is provided with a parallel to the lever arm 24/4 extending extension to which a balancing mass 27 is attached.
- Fig. 1 / 1c an embodiment is shown by way of example in which two curved bar springs 21/4 are provided in parallel position as resonant spring 11, 24 and 4 carry the resonance mass 12 together on the longer lever arms and their short lever arms 23/4 by a resting on the piezoelectric element 1 transverse web 122 are interconnected.
- the two rod springs 21/4 are provided with extensions 25/4, which together carry the balancing mass 27.
- this use of two bar springs 21/4 has the advantage that the oscillating system is more stable in its oscillating plane and is less prone to lateral oscillations of vibration.
- the embodiment of Fig. 1 / 1b It should be noted here that also more than two rod springs 21/4 or band-shaped springs 21/6 can be used in parallel position without further notice.
- leaf springs provided there can readily be replaced by correspondingly shaped bar springs or band-shaped springs individually or in multiple parallel arrangement, without changing the operating principle something.
- a Regulierfeder 30 which acts in an analogous manner to the upper leaf spring 21/2 and whose bias is adjustable by means of a screw 29 for Einjust réelle the natural frequency of the oscillating system.
- a lock nut 28 is provided for fixing the adjusting screw 29. Otherwise, the structure is the same as in the embodiment of FIG. 2.
- the oscillations of the oscillating system take place, as in all other exemplary embodiments, in each case in the direction of the double arrow 31.
- FIG. 3 In addition to the working position shown in Fig. 3, in which the connecting piece 5 of the frame 2 extends vertically, the working positions shown in Fig. 3a and 3b are possible in which this connecting piece 5 occupies a horizontal position and the legs 3 and 4 together each run vertically with the base 2 '. In these working positions also extend the leaf springs 21/1 and 21/2 vertically, taking a standing in the working position of Fig. 3a and a standing in the working position of Fig. 3b a hanging position.
- FIG. 3d A further working position shown in FIG. 3d is possible in that the frame 2 is positioned on the side with the base plate 2 ', so that FIG. 3 shows a plan view.
- FIG. 4 another very simple embodiment is shown schematically simplified, this differs from the embodiment of FIGS. 1 and 2 only in that the resonance mass 12 is provided on a completely flat planar resonance spring 11 in the form of a leaf spring 21/3.
- the frame 2 is formed slightly lower in this case, which means that the upper horizontal leg 4 has a smaller vertical distance from the lower horizontal leg 3 and, accordingly, the vertical connector 5 is made shorter.
- the leaf spring 21/3, the resonance mass via a plunger 13 in turn with the pump member 14 of the fluid pump 15 is force and motion transmitting connected and arranged on a longer lever arm 24 of the leaf spring 21/3. It also has this Leaf spring a resonance mass 12 outwardly projecting extension 25 ', which is provided with a balance mass 27.
- Figs. 4a and 4b that in addition to the vertical working position shown in Fig. 4, at least two other working positions are possible in which the leaf spring 21 assumes a vertical position, wherein the frame 2 in each case 90 ° is twisted in one direction or the other.
- the lateral position shown in FIG. 4d is also possible here.
- the portion of the leaf spring 21 lying on the piezo element 1 is formed as a rigid part over a region which comprises a part of the short lever arm 23 and at least part of the longer lever arm 24 is stiffened by one or both sides launched rigid plate body or by longitudinal corrugations, so that while the oscillating ability of the leaf spring 21 is maintained overall, but in this stiffened region no deflection of the leaf spring 21 can be carried out.
- This embodiment can be applied to all embodiments equipped with leaf springs 21.
- a three-legged leaf spring 21/3 is extended with its lower to the vertical connector 5 of the frame 2 out and fixed with its end 22 fixed in the same manner as the leaf spring 21 in the embodiment of FIG
- Leaf spring 21/3 thus has three in parallel position one above the other arranged legs 41, 42 and 43.
- resonance masses 12/1 and 12 ' are arranged on the legs 42 and 43, respectively.
- the extended leg 43 also carries the balancing mass 27th
- the lower horizontal leg 41 of the leaf spring 21/3 is under the influence of a pull pin 44 ', which is assigned a regulating spring 30'.
- This regulating spring 30 ' is seated in a cylindrical underside recess 48' of the lower horizontal leg 3 of the frame 2 and can with a Adjusting nut 52 are adjusted with respect to their bias.
- the natural frequency of the oscillating system can be influenced and adjusted to the operating frequency or to the working cycle of the piezoelectric element 1.
- FIG. 5 can each assume different working positions and indeed, as FIGS. 5a, 5b show, essentially the same as the embodiments of FIGS. 2 to 4.
- a further embodiment of the piezoelectric pump drive according to the invention is shown in a schematic simplification, in which the resonant spring 11 is formed as a flat leaf spring 21/5.
- This leaf spring 21/5 is mounted in a frame 2/1, which consists of a horizontal solid lower part 60, on which a bridge-like upper part 61 by means of two vertical supports 62 and 63 is placed.
- the piezoelectric element 1 is arranged centrally and indeed so that it is resiliently supported on the longitudinal center M of the leaf spring 21/5.
- This leaf spring 21/5 rests on the cutting edges of two prism-like support bearings 65 and 66, which are symmetrical to the longitudinal center M are arranged at a lateral distance from this, which corresponds to the short lever arm 23 of the leaf spring 21/5.
- the respective longer lever arms 24 project through window-like recesses 67 and 68 of the vertical supports 62 and 63 and are provided with the resonance masses 12 at their respective ends lying outside the frame 2/1. At the same time these outer ends are each connected via the plunger 13 with the pump member 14 of a fluid pump 15 force and motion transmitting. Again, the vibrations of the longer lever arms 24 of the leaf spring 21/5 take place in each case in the direction of the double arrows 31, again in synchronism with the working cycles or the operating frequency of the piezoelectric element. 1
- the two fluid pumps 15 are connected by connecting lines 17 and 18 to a common output 19.
- FIG. 7 an embodiment is shown in which two piezoelectric pump drives according to FIGS. 1 and 2 are assembled in parallel position to form a common double pumping system.
- the two lower legs 3 of the racks 2 are joined together flush on the underside and the two fluid pumps 15 are similar to the embodiment of FIG. 6 connected by connecting lines 17 and 18 to a common output 19.
- FIGS. 8 and 9 show, it is also possible to arrange two pumping systems of the type shown in FIGS. 1 and 2 such that their resonance springs 11 operate on a common fluid pump 15/1 and at the output 16 twice the pumping power is available put.
- the respective upper and lower legs 3 and 4 are joined by a common rear connecting web 5/2 to form a common frame 2/2.
- the fluid pump 15/1 is arranged between the legs 4 of the frame 2/2.
- the vibrations of the two resonance springs 11 take place in the direction of the double arrows 31.
- FIG. 8 shows this arrangement in plan view
- FIG. 9 shows an end view X from FIG. 8 again.
- two resonant oscillation systems each acting on a fluid pump 15 are also provided, the fundamental basic construction of which corresponds to that of FIG. 8 or FIGS. 1 and 2.
- the frame 2 has only one left and one right leg 73 and 74, which are fastened vertically to a lower horizontal connecting piece 5 '.
- the fluid pumps 15 are mounted on the outside, the pump members 14 are connected via the plunger 13 with the end portions 25 of each of a bow 26 having resonant springs 11.
- these end sections 25 each carry the resonance mass 12 and the balancing masses 27 on the extensions 25 'which are directed downwards in this case.
- the spring legs 21 'again form a short lever arm 23 between the bearing part 78 and the support point A , on which they rest on the piezoelectric elements 1 resiliently and longer lever arms 24 which are connected via the arcuate portions 26 with the end portions 25.
- adjusting devices are also provided with a respective regulating spring 30 and screws 29 and lock nuts 28 which are arranged in an analogous manner as the embodiment of FIG. 2 and work.
- the two fluid pumps 15 are also connected via connecting lines 17 and 18 to a common output 19 here.
- the resonance spring is formed as a leaf spring 21 and the construction principle of Figs. 1 and 2 is realized, d. H. in the embodiments of FIGS. 2 to 4 and 5 to 10, the leverage is advantageously used to increase the work, which consists between the short lever 23 and the longer lever 24 of the leaf spring and which causes the oscillating system, the has to actuate the fluid pump 15, even at minimum deflections of the piezoelectric element 1 substantially larger vibration amplitudes executes that are used to actuate the pumping organ 14.
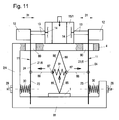
- a leverage is utilized.
- two isosceles-like isosceles knee joints are provided, each consisting of a lower lever 85 and an upper lever 86 and a joint 87 connecting these two levers 85 and 86, wherein the Gelenk.87 is connected by a connecting rod 88 each with a leaf spring 21/6.
- the vertical deflections of the piezoelectric element 1 are converted into horizontal movements, so that the two leaf springs 21/6 each experience an outward deflection.
- both joints 87 are connected to one another by a tension spring 91, which should be adjustable.
- the two upper levers 86 of the two knee joints are supported on the underside of the leg 4.
- each longer lever arms 24 of the leaf springs 21/6 are provided with externally mounted resonance masses 12 and at the same time via plunger 13 with the pump members 14 of a double fluid pump 15/1 force and motion-transmitting connected, so that their swinging movements actuate the pumping members 14.
- the leaf springs 21/6 each protrude through recesses 89 and 90 of the upper leg 4, on which the double fluid pump 15/1 is arranged centrally.
- the natural frequency of the two leaf springs 21/6 can each be adjusted to some extent, so that here in a simple manner synchronism between the natural frequency of the two oscillating systems and the duty cycle or Working frequency of the piezoelectric element 1 can be achieved.
- the deflection amplitude of the upper leaf spring ends is approximately six times greater than the vertical deflection of the piezoelement 1.
- pumping pistons can also be used as pumping elements instead of the pumping diaphragms mentioned in the exemplary embodiments.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Reciprocating Pumps (AREA)
Abstract
Description
- Die Erfindung betrifft einen piezoelektrischen Pumpenantrieb, insbesondere für Luftpumpen mit einer Membran als Pumporgan, bei dem ein Resonanzschwingsystem, das wenigstens eine mittels einer Resonanzfeder federelastisch gelagerte Resonanzmasse aufweist und dessen Schwingungen von wenigstens einem elektrisch aktivierten Piezoelement erzeugt werden, das Pumporgan oszillierend antreibt, wobei das Piezoelement über die mit der Resonanzmasse versehene Resonanzfeder mit dem Pumporgan in kraft- und bewegungsübertragender Antriebsverbindung steht.
- Aus
DE 102 34 584 B3 ist eine piezoelektrisch betätigbare Pumpe bekannt, die einen Piezo-Aktuator, ein Pumporgan und ein dazwischen angeordnetes, zur Übertragung und Verstärkung der Schwingungen des Piezo-Aktuators geeignetes Feder-Masse-System aufweist. Das Feder-Masse-System besteht aus zwei vorgespannten koaxial zueinander in Reihe geschalteten Federn und einer zwischen den Federn angeordneten und an den Federn aufgehängten Schwingmasse. - Durch eine starre Kopplung zwischen der Schwingmasse und dem beispielsweise aus einer Membran bestehenden Pumporgan werden die vom Piezo-Aktuator über eine der Federn angeregten Längsschwingungen der Schwingmasse auf das Pumporgan übertragen, damit das Pumporgan seine Pumphübe ausführt. Dabei ist auch die Möglichkeit vorgesehen, dass das Pumporgan selbst als Schwingmasse ausgebildet ist, was allerdings mit einer Membran als Pumporgan nicht möglich sein dürfte.
- Bei dieser piezoelektrisch angetriebenen Pumpe wird der sich µm-Bereich liegende Arbeitshub des Piezo-Aktuators genutzt, um das Feder-Masse-System zum Schwingen in Resonanz anzuregen. Es soll damit nicht nur ein verbesserter Wirkungsgrad bei der Umwandlung von elektrischer in mechanische Energie, sondern auch eine erhebliche Vergrößerung des Arbeitshubs erzielt werden.
- Aufgrund der linearen Anordnung der beiden bei den offenbarten Ausführungsbeispielen angegebenen Schraubenfedern, welche in zueinander koaxialer Lage gemeinsam die Schwingmasse tragen, bedarf die Schwingmasse einer ihr Gewicht aufnehmenden Führung oder Lagerung, die nicht ohne Lagerreibung zu realisieren ist. Eine Lagerreibung hemmt ein freies Schwingen, so dass ein solches Feder-Masse-Schwingsystem nicht frei schwingen und leicht außer Tritt fallen kann. Der Resonanzeffekt, der die genannten Verbesserungen erbringen soll, ist somit bei diesem System nicht ohne weiteres zu gewährleisten.
- Aus
EP 1 593 847 A2 ist ein Resonanzpumpensystem bekannt, bei dem ein Resonanzschwingsystem zur Ausführung oszillierender Bewegungen vorgesehen ist, das aus einer Schwingfeder besteht, die mit der Resonanzmasse verbunden ist. - Zur Aufrechterhaltung der oszillierenden Bewegungen des Resonanzschwingsystems ist eine Energiequelle in Form eines Piezoelementes vorgesehen, das über einen Übertragungsarm mit dem Pumporgan einer Fluid-Pumpe verbunden ist. Dabei besteht das Piezoelement aus einem Flachstab der als Bieger arbeitet und mit seinem einen schmalen Ende ortsfest eingespannt ist und an seinem anderen Ende die Resonanzmasse bzw. Schwingmasse trägt. Als Rückstellkraft dient dabei die dem flachstabförmigen Piezoelement innewohnende Elastizität. Als Pumporgan ist dort ein Kolben vorgesehen, der oszillierend in einem Pumpzylinder zu bewegen ist.
- Mit Hilfe der sog. Resonanz- bzw. Schwingmasse soll bei diesem System durch das in der Eigenfrequenz schwingende Piezoelement bei Schwingungsfrequenzen zwischen 200 Hz und 2 KHz ein Pumpkolben bestätigt werden, der einen Durchmesser von 0,1 mm bis 1 mm aufweist.
- Dass dabei keine großen Pumpleistungen erzielt werden können, liegt auf der Hand, zumal sog. piezoelektrische Biegeschwinger bei Schwingfrequenzen über 100 Hz nur sehr kleine Biegeamplituden ausführen können und die Resonanzmasse bzw. Schwingmasse mit zunehmender Schwingfrequenz potentiell abnimmt.
- Außerdem besteht bei diesen bekannten Schwingsystemen die Gefahr, dass sie schon bei geringen Kraftwiderständen außer Tritt fallen und stehen bleiben. Ein wesentlicher Grund für diese Gefahr des außer Tritt Fallens besteht darin, dass zwischen dem Pumporgan und dem Piezoelement eine direkte starre Gelenkverbindung besteht, die im mittleren Bereich des Piezoelementes an das Piezoelement angekuppelt ist. An diesem Punkt sind die Auslenkamplituden weniger als halb so groß wie an dem freischwingenden, mit der Resonanzmasse bzw. Schwingmasse versehenen Endabschnitt.
- In der Fachliteratur werden solche Piezoelemente häufig auch Piezoaktoren genannt, die um möglichst große Auslenkungen zu erzielen, häufig als Vielschichtaktoren aufgebaut sind (Piezokeramik, Karl Ruschmeier, ISBN 3-8169-1152-8).
- Der Erfindung liegt die Aufgabe zugrunde, einen piezoelektrischen Pumpenantrieb, insbesondere für Luftpumpen mit einer Membran, der eingangs genannten Art zu schaffen, der bei einfachem und funktionssicherem Aufbau eine gegenüber dem Bekannten wesentlich bessere Arbeitsleistung zu erbringen in der Lage und in unterschiedlichen, den jeweiligen Anwendungsbedürfnissen optimal anpassbaren baulichen Ausführungsformen realisierbar ist.
- Gelöst wird diese Aufgabe erfindungsgemäß dadurch, dass als Resonanzfeder und Träger der Resonanzmasse wenigstens eine solche stab-, blatt- oder bandförmige Feder vorgesehen ist, auf welche das Piezoelement an einem kurzen Hebelarmeinwirkt, und die an einem längeren Hebelarm die Resonanzmasse trägt, so dass zwischen den antreibenden Bewegungsamplituden des Piezoelements und den resultierenden Bewegungsamplituden der Resonanzmasse eine positive mechanische Wegübersetzung besteht.
- Durch das erfindungsgemäße Prinzip der wenigstens eine Hebelübersetzung aufweisenden Kraft- und Bewegungsübertragung vom Piezoelement auf das Pumporgan über die mit der Resonanzmasse versehene Resonanzfeder, wird zwangsläufig in der Weise eine höhere Leistungsabgabe erreicht, dass durch die Hebelübersetzung die relativ kleinen Bewegungsamplituden des an einem kurzen Hebelarm auf die Resonanzfeder einwirkenden Piezoelements zwangsläufig wesentlich größere Bewegungsamplituden der am längeren Hebelarm der Resonanzfeder sitzenden Resonanzmasse erzeugen.
- Außerdem wird nicht nur die Gefahr des Außertrittfallens bei Auftreten einer Arbeitslast vermindert sondern es wird auch erreicht, dass die im Rhythmus des Piezoelementes schwingende Schwingmasse ihre kinetische Energie weitgehend als Arbeitsenergie an das Pumporgan weitergibt, so dass eine wesentlich höhere Pumpleistung und Funktionssicherheit erzielt werden kann, als dies bei den bekannten piezoelektrischen Antriebssystemen der Fall ist. Dabei kann die Resonanzfeder die Form eines geraden oder gebogenen Stabes oder die Form einer bandförmigen Feder haben. Dabei kann die Querschnittsform des Federstabes prinzipiell beliebig gewählt werden. Möglicherweise haben aber recheckige, und elliptische Querschnittsformen gegenüber rotationssymmetrischen, d.h. runden oder quadratischen, Querschnittsformen gewisse Vorteile bezüglich ihre Schwingungseigenschaften.
Unter bandförmigen Federn sind im Allgemeinen schmale, dünne Blattfedern zu verstehen. - Selbstverständlich ist Voraussetzung für diese effektive Arbeitsweise, dass Synchronizität zwischen dem Arbeitsrhythmus des beispielsweise mit der Netzfrequenz von 50 Hz arbeitenden Piezoelementes und der Eigenschwingung des Schwingsystems herrscht.
- Für die Realisierung, d.h. die praktische Umsetzung des Erfindungsprinzips, stehen mehrere Möglichkeiten zur Verfügung, die in den Ansprüchen 2 bis 20 als vorteilhafte Ausgestaltungen der Erfindung definiert sind.
- Gegenüber einer Schraubendruckfeder als Resonanzfeder hat die Verwendung einer stab-, blatt- oder bandförmigen Feder den Vorteil, dass diese nahezu lageunabhängig, d.h. in annähernd jeder beliebigen Lage, frei schwingen kann. Bei einer Schraubendruckfeder hingegen ist es erforderlich, dass diese zumindest annähernd in vertikaler Lage mit der Resonanzmasse schwingt und diese trägt. Eine das Gewicht der Resonanzmasse aufnehmende Lagerung oder Führung, die mit Lagerreibung behaftet ist, wird nicht benötigt. Die Resonanzschwingung kann somit allenfalls von den aufzubringenden Pumpkräften beeinflusst werden.
- Erst durch die Verwendung einer Stabfeder, einer Blattfeder oder einer bandförmigen Feder ist auch die erfindungsgemäß genutzte Möglichkeit gegeben, Hebelübersetzungen und damit Bewegungsübersetzungen vorzusehen und sinnvoll zu nutzen. Gerade durch die Hebelübersetzungen lassen sich wesentlich höhere Arbeitsleistungen bei besseren Wirkungsgraden erzielen und die Gefahr des Außertrittfallens erheblich vermindern. Das ganze System ist auch bei hoher Arbeitsleistung weniger störanfällig.
- Eine Blattfeder mit ausreichender Breite kann das schwingen der Resonanzfeder in einer Ebene gewährleisten, so dass keine zusätzlichen seitlichen Führungen erforderlich sind.
- Dieses Schwingen in einer Ebene kann auch mit Stabfedern und mit bandförmigen Federn erreicht werden, wenn man diese in zumindest zweifacher Parallelanordnung als die Resonanzmasse tragende Resonanzfedern vorsieht.
- Durch die besonders vorteilhafte Ausgestaltung nach Anspruch 9, nach der eine Regulierfeder vorgesehen ist, besteht die Möglichkeit, die Resonanzfrequenz des Schwingsystems auf die Arbeitsfrequenz des Piezoelements einzujustieren, um optimale Arbeitsverhältnisse zu erhalten.
- Anhand der Zeichnungen wird die Erfindung in mehreren Ausführungsbeispielen näher erläutert. Es zeigt:
- Fig. 1
- den prinzipiellen Aufbau eines piezoelektrischen Pumpantriebs mit einer als Blattfeder ausgebildeten Resonanzfeder in isometrischer Darstellung;
- Fig. 1a
- eine besondere Ausführungsform der Resonanzfeder aus Fig. 1;
- Fig. 1/1
- eine Ausführungsform gemäß Fig. 1, jedoch mit einer Stabfeder als Resonanzfeder;
- Fig. 1/1a
- einen Teil der stabförmigen Resonanzfeder aus Fig. 1/1 mit daran befestigter Resonanzmasse;
- Fig. 1/1b
- in isometrischer Darstellung ein Schwingsystem mit zwei gleichen bandförmigen Federn in Parallelanordnung als Resonanzfeder mit daran befestigter Resonanzmasse;
- Fig. 1/1c
- in isometrischer Darstellung ein Schwingsystem mit zwei gleichen stabförmigen Federn in Parallelanordnung als Resonanzfeder ohne die Resonanzmasse;
- Fig. 2
- die Prinzipdarstellung der Ausführungsform der Fig. 1 in vereinfachter Seitenansicht;
- Fig. 2a und Fig. 2b
- den piezoelektrischen Pumpenantrieb der Fig. 2 in zwei anderen Arbeitspositionen;
- Fig. 2c
- eine Stirnansicht IIc aus Fig. 2;
- Fig. 2d
- die Ausführungsform der Fig. 2 in Stirnansicht gemäß Fig. IIc, jedoch in Seitenlage;
- Fig. 3
- eine andere Ausführungsform des piezoelektrischen Pumpenantriebes in Seitenansicht;
- Fig. 3a und 3b
- den piezoelektrischen Pumpenantrieb der Fig. 3 in zwei anderen Arbeitspositionen;
- Fig. 3c
- eine Stirnansicht IIIc aus Fig. 3;
- Fig. 3d
- die Ausführungsform der Fig. 3 in Stirnansicht gemäß Fig. IIIc, jedoch in Seitenlage;
- Fig. 4
- eine weitere Ausführungsform in schematischer Seitenansicht;
- Fig. 4a und 4b
- den piezoelektrischen Pumpenantrieb der Fig. 4 in zwei anderen Arbeitspositionen;
- Fig. 4c
- eine Stirnansicht IVc aus Fig. 4;
- Fig. 4d
- die Ausführungsform der Fig. 4 in Stirnansicht gemäß Fig. 4c, jedoch in Seitenlage;
- Fig. 5
- eine Variante der Fig. 5 in schematischer Seitenansicht;
- Fig. 5a und Fig. 5b
- den piezoelektrischen Pumpenantrieb der Fig. 5 in zwei anderen Arbeitspositionen;
- Fig. 5c
- ein Funktionsschema der unterschiedlichen Hebelarme;
- Fig. 6
- in schematischer Stirnansicht ein Doppelpumpensystem mit einer zwei Resonanzmassen tragenden Blattfeder als Resonanzfeder;
- Fig. 7
- ein Doppelpumpsystem bestehend aus zwei in Parallelanordnung zusammengefügten piezoelektrischen Pumpenantrieben gemäß Fig. 1 und 2;
- Fig. 8
- in einem gemeinsamen Gestell zwei Antriebs-systeme gemäß den Fig. 1 und 2, die auf eine Doppelpumpe arbeiten, in schematischer Draufsicht IX aus Fig. 9;
- Fig. 9
- die Stirnansicht X aus Fig. 8;
- Fig. 10
- ein weiteres Doppelpumpsystem in schematischer Draufsicht und
- Fig. 11
- ein weiteres Doppelpumpsystem in schematischer Draufsicht.
- Bei allen nachfolgend beschriebenen Ausführungsbeispielen bestehen die verwendeten Piezoelemente 1 bevorzugt aus Vielschichtaktoren, die als Stapelaktoren ausgebildet sind.
- In den Fig. 1 und 2 ist ein piezoelektrischer Pumpantrieb schematisch vereinfacht dargestellt, bei dem das aus einem unteren horizontalen Schenkel 3, einem oberen horizontalen Schenkel 4 und dem vertikalen Verbindungsstück 5 bestehende Gestell 2 auf einem massiven Sockel 2' angeordnet ist, der dem Gestell 2 die nötige Stabilität und Trägheitsmasse verleiht um Eigenschwingungen des Gestells zu vermeiden.
- Als Resonanzfeder 11 ist bei diesem Ausführungsbeispiel eine Blattfeder 21 vorgesehen, die mit einem Ende 22 im vertikalen Verbindungsstück 5 des Gestells 2 festsitzend befestigt ist. Dabei ist diese Resonanzfeder 11 bzw. Blattfeder 21 so angeordnet, dass sie mit einem kurzen Hebelarm 23 federnd auf dem Piezoelement 1 aufliegt. Dieses ist seinerseits in geringem Abstand vom vertikalen Verbindungsstück 5 des Gestells 2 auf dem unteren Horizontalschenkel 3 angeordnet, so dass zwischen dem Auflagepunkt A und dem eingespannten Ende 22 der Blattfeder 21 ein kurzer Hebelarm 23 besteht. Diese Blattfeder 21 ist bei dieser Ausführungsform auf der anderen Seite des Auflagepunktes A mit einem längeren Hebelarm 24 versehen, der den kurzen Hebelarm 23 mit umfasst und der einen rückwärts gebogenen Endabschnitt 25 aufweist, an dem eine Resonanzmasse 12 unterseitig befestigt ist. Dieser durch den Bogen 26 einstückig mit dem längeren Hebelarm 24 verbundene Endabschnitt 25 ist mit einer parallel zum Hebelarm 24 verlaufenden Verlängerung 25' versehen, an welcher eine Balancemasse 27 befestigt ist, die eine zumindest annähernde Parallelschwingung des Endabschnitts 25 bzw. 25' zu seiner Erstreckungsrichtung in Richtung des Doppelpfeils 31 bewirkt.
- Das Funktionsprinzip der unterschiedlich langen Hebelarme 23 und 24 ist aus Fig. 5c erkennbar. Die Schwingungsamplitude a2 am Ende des längeren Hebelarms s2, der dem Hebelarm 24 entspricht, ist größer als die Schwingungsamplitude a1 am Ende des kurzen Hebelarms s1, der dem Hebelarm 23 entspricht. Dabei gilt:

- Diese Formel gilt auch für die nachfolgend beschriebenen Hebelverhältnisse der weiteren Ausführungsformen.
- Durch einen Stößel 13 ist der Endabschnitt 25 direkt mit einem Pumporgan 14 einer auf dem Horizontalschenkel 4 des Gestells angeordneten Fluidpumpe 15 verbunden. Diese Fluidpumpe 15 hat einen horizontalen Auslass 16, durch den das gepumpte Fluid nach außen strömt.
- Bei dieser Anordnung und dieser aus einer gebogenen Blattfeder 21 bestehenden Resonanzfeder 11 steht das Piezoelement 1 über die Resonanzfeder 11 und den Verbindungsstößel 13 unmittelbar mit dem Pumporgan 14 der Fluidpumpe 15 in kraft- und bewegungsübertragender Verbindung.
- Diese Kraftflußbedingung ist auch bei den übrigen Ausführungsbeispielen, die nachfolgend noch näher beschrieben werden, erfüllt.
- Um eine Möglichkeit zu haben, die Eigenfrequenz des aus der Resonanzfeder 11 und der Resonanzmasse 12 sowie der Balancemasse 27 bestehenden Schwingsystems auf den Arbeitsrhythmus des Piezoelementes 1 einjustieren zu können, ist eine Regulierfeder 30 vorgesehen, die in geringem Abstand von dem Auflagepunkt A, an dem die Blattfeder 21 auf dem Piezoelement 1 aufliegt, auf den längeren Hebelarm 24 der Blattfeder 21 einwirkt. Die Druckkraft dieser Regulierfeder 30 ist mittels einer im oberen Horizontalschenkel 4 sitzenden Stellschraube 29 mit Kontermutter 28 justierbar und fixierbar. Diese Stellschraube 29 ist an ihrem unteren Ende mit einer zylindrischen Aufnahmehülse 33 versehen, in der das obere Ende der Regulierfeder 30 geführt ist. Das untere Ende dieser Regulierfeder 30 stützt sich über ein Druckstück 34 auf dem längeren Hebelarm 24 der Blattfeder 21 ab, so dass die Blattfeder 21 insgesamt dauernd unter einer gewissen Vorspannung, also federnd, auf dem Piezoelement 1 aufliegt.
- Diese Ausführungsform des erfindungsgemäßen piezoelektrischen Pumpenantriebs kann sowohl in der in den Fig. 1 und 2 dargestellten Arbeitslage betrieben werden. Es besteht aber auch die Möglichkeit, die in den Fig. 2a bzw. 2b bzw. 2d dargestellten Arbeitslagen zu wählen. In Fig. 2a ist die Arbeitslage derart, dass die Blattfeder 21 eine stehende vertikale Lage einnimmt, während sie in Fig. 2b eine hängende vertikale Lage einnimmt. In diesen Positionen liegt das Gewicht der Resonanzmasse 12 bzw. Balancemasse 27 nicht auf dem Piezoelement 1 auf.
- Dasselbe kann auch erreicht werden, indem das Gestell 2, gemäß Fig. 2d, seitlich gelagert wird, so dass der Hebelarm 24 der Blattfeder 21 mit seiner Flachseite eine vertikale Lage einnimmt, seine Längsseiten jedoch horizontal verlaufen.
- Die Abbildungen 2a und 2b stellen in diesem Falle jeweils eine Draufsicht von oben dar.
- Beim Ausführungsbeispiel der Fig. 1/1 ist an Stelle der Blattfeder 21, jedoch in gleicher Anordnung, als Resonanzfeder 11 eine gebogene Stabfeder 21/4 aus rundem Federdraht vorgesehen. Diese Stabfeder 21/4 ist mit einem Ende 22/4 im vertikalen Verbindungsstück 5 des Gestells festsitzend befestigt. Mit einem kurzen Hebelarm 23/4 liegt sie federnd auf dem Piezoelement 1 auf. Der längere Hebelarm 24/4, der auch hier den kurzen Hebelarm 23/4 mit umfasst, weist einen rückwärts gebogenen Endabschnitt 25/4 auf, an dem die Resonanzmasse 12 unterseitig befestigt ist. Auch hier ist der durch den Bogen 26/4 mit dem längeren Hebelarm 24/4 verbundene Endabschnitt 25/4 mit einer parallel zum Hebelarm 24/4 verlaufenden Verlängerung versehen, an welcher eine Balancemasse 27 befestigt ist. Durch den Stößel 13 ist auch der Endabschnitt 25/4 mit der Fluidpumpe 15 verbunden.
- Bei dem in Fig. 1/1b dargestellten Schwingsystem ist die Blattfeder 21 der Fig. 1 und 2 ersetzt durch zwei in Parallelanordnung angebrachte, bandförmige Federn 21/5.
- Diese beiden Federn 21/5 sind durch einen Verbindungssteg 120 miteinander verbunden. Dieser Verbindungssteg 120 ist so angeordnet, dass die beiden gemeinsam die Resonanzfeder 11 bildenden Federn 21/5 über kurze Hebelarme 23/5 auf dem Piezoelement 1 aufliegen und die jeweils längeren Hebelarme 24/5 an den oberen Enden der Bogen 26/5 mittels zweier Trägerplatten 121 die Resonanzmasse 12 tragen. Auch hierbei sind Verlängerungen 25' vorgesehen, an denen eine Balancemasse 27 befestigt ist.
- In Fig. 1/1c ist beispielhaft eine Ausführungsform dargestellt, bei der als Resonanzfeder 11 zwei gebogene Stabfedern 21/4 in Parallellage vorgesehen sind, die gemeinsam an den längeren Hebelarmen 24/4 die Resonanzmasse 12 tragen und deren kurze Hebelarme 23/4 durch einen auf dem Piezoelement 1 aufliegenden Quersteg 122 miteinander verbunden sind. Wie bei der Ausführung der Fig. 1/1 sind auch die beiden Stabfedern 21/4 mit Verlängerungen 25/4 versehen, die gemeinsam die Balancemasse 27 tragen. Gegenüber der Ausführungsform gemäß Fig. 1/1, bei der nur eine Stabfeder 21/4 vorgesehen ist, hat diese Verwendung zweier Stabfedern 21/4 den Vorteil, dass das Schwingsystem in seiner Schwingebene stabiler ist und erheblich weniger zu seitlichen Schwingungsausschlägen neigt. Dasselbe gilt auch für die Ausführungsform der Fig. 1/1b.
Es ist hier anzumerken, dass ohne Weiteres auch mehr als zwei Stabfedern 21/4 oder bandförmige Federn 21/6 in Parallellage zur Anwendung kommen können. - Es versteht sich, dass bei den nachfolgend beschriebenen Ausführungsformen die dort vorgesehenen Blattfedern ohne Weiteres durch entsprechend geformte Stabfedern oder bandförmige Federn einzeln oder in mehrfacher Parallelanordnung ersetzt werden können, ohne dass sich am Funktionsprinzip etwas ändert.
- Beim Ausführungsbeispiel der Fig. 3 sind zwei gleiche Blattfedern 21/1 und 21/2 in geringem Abstand übereinander angeordnet, deren Enden 22 jeweils im vertikalen Verbindungsstück 5 des Gestells 2 starr befestigt sind. Dabei liegt die untere Blattfeder 21/1 in der gleichen Weise wie der Hebelarm 24 der Blattfeder 21 auf dem Piezoelement 1 auf, das auch die gleiche Lage einnimmt wie in Fig. 2.
- Die freien Enden dieser Blattfedern 21/1 und 21/2 sind gelenkig durch einen Verbindungssteg 36 miteinander verbunden. Dieser Verbindungssteg 36 ist einerseits durch ein Winkelstück 37 und den Stößel 13 mit dem Pumporgan 14 der Fluidpumpe 15 verbunden.
- Auch bei dieser Ausführungsform ist eine Regulierfeder 30 vorgesehen, die in analoger Weise auf die obere Blattfeder 21/2 einwirkt und deren Vorspannung mittels einer Stellschraube 29 zur Einjustierung der Eigenfrequenz des Schwingsystems einstellbar ist. Wie beim Ausführungsbeispiel der Fig. 1 und 2 ist zur Fixierung der Einstellschraube 29 eine Kontermutter 28 vorgesehen. Im übrigen ist der Aufbau gleich wie beim Ausführungsbeispiel der Fig. 2.
- Die Schwingungen des Schwingsystems erfolgen, wie bei allen anderen Ausführungsbeispielen, jeweils in Richtung des Doppelpfeils 31.
- Auch bei dieser Ausführungsform sind verschiedene Arbeitspositionen möglich. Außer der in Fig. 3 dargestellten Arbeitsposition, bei der das Verbindungsstück 5 des Gestells 2 vertikal verläuft, sind auch die in Fig. 3a und 3b dargestellten Arbeitsstellungen möglich, in denen dieses Verbindungsstück 5 jeweils eine horizontale Lage einnimmt und die Schenkel 3 und 4 zusammen mit dem Sockel 2' jeweils vertikal verlaufen. In diesen Arbeitsstellungen verlaufen auch die Blattfedern 21/1 und 21/2 vertikal, wobei sie in der Arbeitsstellung der Fig. 3a eine stehende und in der Arbeitsstellung der Fig. 3b eine hängende Lage einnehmen.
- Eine weitere, in Fig. 3d dargestellte Arbeitsposition ist dadurch möglich, dass das Gestell 2 mit der Sockelplatte 2' auf der Seite liegend positioniert wird, so dass die Fig. 3 eine Draufsicht darstellt.
- In Fig. 4 ist eine weitere sehr einfache Ausführungsform schematisch vereinfacht dargestellt, diese unterscheidet sich von der Ausführungsform der Fig. 1 und 2 lediglich dadurch, dass die Resonanzmasse 12 auf einer völlig flachen ebenen Resonanzfeder 11 in Form einer Blattfeder 21/3 vorgesehen ist. Das Gestell 2 ist in diesem Fall etwas niedriger ausgebildet, was bedeutet, dass der obere Horizontalschenkel 4 einen geringeren vertikalen Abstand vom unteren Horizontalschenkel 3 aufweist und dementsprechend das vertikale Verbindungsstück 5 kürzer ausgestaltet ist. Bei dieser Ausführungsform der Blattfeder 21/3 ist die Resonanzmasse über einen Stößel 13 wiederum mit dem Pumporgan 14 der Fluidpumpe 15 kraft- und bewegungsübertragend verbunden und auf einem längeren Hebelarm 24 der Blattfeder 21/3 angeordnet. Außerdem besitzt diese Blattfeder eine die Resonanzmasse 12 nach außen überragende Verlängerung 25', die mit einer Balancemasse 27 versehen ist.
- Auch hier finden die Schwingungen in Richtung des Doppelpfeiles 31 statt und zwar im Arbeitsrhythmus des Piezoelements 1, die der Eigenfrequenz dieses Schwingungssystems entspricht.
- Auch zu diesem Ausführungsbeispiel der Fig. 4 zeigen die Fig. 4a und 4b, dass außer der in Fig. 4 dargestellten vertikalen Arbeitslage, wenigstens zwei weitere Arbeitslagen möglich sind, in denen die Blattfeder 21 eine vertikale Lage einnimmt, wobei das Gestell 2 jeweils um 90° in der einen oder anderen Richtung verdreht ist. Auch die in Fig. 4d dargestellte Seitenlage ist hier möglich.
- Wie Versuche gezeigt haben, kann es von Vorteil sein, wenn der auf dem Piezoelement 1 aufliegende Abschnitt der Blattfeder 21 über einen Bereich, der einen Teil des kurzen Hebelarms 23 und wenigstens einen Teil des längeren Hebelarms 24 umfasst, als in sich starres Teil ausgebildet bzw. durch ein- oder beidseitig aufgelegte starre Plattenkörper oder durch Längssicken versteift ist, so dass zwar die Schwingfähigkeit der Blattfeder 21 insgesamt erhalten bleibt, aber in diesem versteiften Bereich keine Durchbiegung der Blattfeder 21 erfolgen kann.
- Diese Ausführungsform kann bei allen mit Blattfedern 21 ausgerüsteten Ausführungsbeispielen angewandt werden.
- Bei der Ausführungsform in Fig. 5 ist eine dreischenklige Blattfeder 21/3 mit ihrem unteren zum vertikalen Verbindungsstück 5 des Gestells 2 hin verlängert und mit ihrem Ende 22 festsitzend auf die gleiche Weise befestigt, wie die Blattfeder 21 beim Ausführungsbeispiel der Fig. 2. Diese Blattfeder 21/3 weist somit drei in Parallellage übereinander angeordnete Schenkel 41, 42 und 43 auf. Dabei sind an den Schenkeln 42 und 43 jeweils Resonanzmassen 12/1 und 12' angeordnet. Der verlängerte Schenkel 43 trägt zudem die Balancemasse 27.
- Bei diesem Ausführungsbeispiel gemäß Fig. 5 steht der untere horizontale Schenkel 41 der Blattfeder 21/3 unter dem Einfluss eines Zugstiftes 44', dem eine Regulierfeder 30' zugeordnet ist. Diese Regulierfeder 30' sitzt in einer zylindrischen unterseitigen Ausnehmung 48' des unteren Horizontalschenkels 3 des Gestells 2 und kann mit einer Stellmutter 52 bezüglich ihrer Vorspannung eingestellt werden. Mit Hilfe dieser Reguliereinrichtung kann die Eigenfrequenz des Schwingsystems beeinflusst und auf die Arbeitsfrequenz bzw. auf den Arbeitszyklus des Piezoelements 1 einjustiert werden.
- Der Vollständigkeit halber sei auch hier erwähnt, dass die Ausführungsform gemäß der Fig. 5 jeweils unterschiedliche Arbeitspositionen einnehmen kann und zwar, wie die Fig. 5a, 5b zeigen, im Wesentlichen die gleichen wie die Ausführungsformen der Fig. 2 bis 4.
- In Fig. 6 ist eine weitere Ausführungsform des erfindungsgemäßen piezoelektrischen Pumpenantriebs in schematischer Vereinfachung dargestellt, bei der die Resonanzfeder 11 als ebene Blattfeder 21/5 ausgebildet ist. Diese Blattfeder 21/5 ist in einem Gestell 2/1 gelagert, das aus einem horizontalen massiven Unterteil 60 besteht, auf welches ein brückenartiges Oberteil 61 mittels zweier vertikaler Stützen 62 und 63 aufgesetzt ist. An der planebenen Unterseite 64 ist das Piezoelement 1 zentrisch angeordnet und zwar so, dass es sich federnd auf der Längsmitte M der Blattfeder 21/5 abstützt. Diese Blattfeder 21/5 liegt dabei auf den Schneiden zweier prismenartiger Stützlager 65 und 66 auf, die symmetrisch zur Längsmitte M in einem seitlichen Abstand von dieser angeordnet sind, der dem kurzen Hebelarm 23 der Blattfeder 21/5 entspricht. Die jeweils längeren Hebelarme 24 durchragen fensterartige Ausnehmungen 67 und 68 der vertikalen Stützen 62 und 63 und sind an ihren jeweils außerhalb des Gestells 2/1 liegenden Enden mit den Resonanzmassen 12 versehen. Zugleich sind diese äußeren Enden jeweils über die Stößel 13 mit dem Pumporgan 14 einer Fluidpumpe 15 kraft-und bewegungsübertragend verbunden. Auch hier finden die Schwingungen der längeren Hebelarme 24 der Blattfeder 21/5 jeweils in Richtung der Doppelpfeile 31 statt und zwar wiederum synchron zu den Arbeitszyklen bzw. der Arbeitsfrequenz des Piezoelements 1.
- Bei diesem Ausführungsbeispiel der Fig. 6 sind die beiden Fluidpumpen 15 durch Verbindungsleitungen 17 und 18 an einen gemeinsamen Ausgang 19 angeschlossen.
- In Fig. 7 ist ein Ausführungsbeispiel dargestellt, bei dem zwei piezoelektrische Pumpantriebe gemäß Fig. 1 und 2 in Parallellage zu einem gemeinsamen Doppelpumpsystem zusammengefügt sind. Dabei sind jeweils die beiden unteren Schenkel 3 der Gestelle 2 unterseitig bündig aneinandergefügt und die beiden Fluidpumpen 15 sind ähnlich wie beim Ausführungsbeispiel der Fig. 6 durch Verbindungsleitungen 17 und 18 auf einen gemeinsamen Ausgang 19 geschaltet.
- Ob dabei die beiden Schwingsysteme exakt synchron schwingen, spielt für die erzielte doppelte Pumpleistung, die am gemeinsamen Ausgang 19 zur Verfügung steht, keine wesentliche Rolle.
- Wie die Fig. 8 und 9 zeigen, besteht auch die Möglichkeit, zwei Pumpsysteme der in Fig. 1 und 2 dargestellten Art so anzuordnen, dass ihre Resonanzfedern 11 auf eine gemeinsame Fluidpumpe 15/1 arbeiten und an deren Ausgang 16 die doppelte Pumpleistung zur Verfügung stellen. Dabei sind die jeweils oberen und unteren Schenkel 3 und 4 durch einen gemeinsamen rückseitigen Verbindungssteg 5/2 zu einem gemeinsamen Gestell 2/2 zusammengefügt. Die Fluidpumpe 15/1 ist zwischen den Schenkeln 4 des Gestells 2/2 angeordnet. Die Schwingungen der beiden Resonanzfedern 11 erfolgen in Richtung der Doppelpfeile 31.
- Während Fig. 8 diese Anordnung in Draufsicht zeigt, gibt die Fig. 9 eine Stirnansicht X aus Fig. 8 wieder.
- Beim Ausführungsbeispiel der Fig. 10 sind ebenfalls zwei jeweils auf eine Fluidpumpe 15 wirkende Resonanzschwingsysteme vorgesehen, deren prinzipieller Grundaufbau demjenigen der Fig. 8 bzw. den Fig. 1 und 2 entspricht. Aufbaumäßig ist jedoch dadurch eine Vereinfachung erzielt, dass das Gestell 2 lediglich einen linken und einen rechten Schenkel 73 und 74 aufweist, die vertikal erstreckend an einem unteren horizontalen Verbindungsstück 5' befestigt sind. An den oberen Enden dieser Schenkel 73 und 74 sind außenseitig jeweils die Fluidpumpen 15 angebracht, deren Pumporgane 14 über die Stößel 13 mit den Endabschnitten 25 der jeweils einen Bogen 26 aufweisenden Resonanzfedern 11 verbunden sind. Wie beim Ausführungsbeispiel der Fig. 1 und 2 tragen diese Endabschnitte 25 jeweils die Resonanzmasse 12 und an den, in diesem Falle nach unten gerichteten Verlängerungen 25', die Balancemassen 27.
- Zur wesentlichen baulichen Vereinfachung trägt auch die Tatsache bei, dass die beiden sich in diesem Falle vertikal erstreckenden Schenkel 21' der Blattfedern 21 durch einen Verbindungsbogen 75 einstückig miteinander verbunden sind. Dieser Verbindungsbogen 75 ist mittels eines halbrunden Spannstückes 76 und einer Spannschraube 77 in einem kalottenartigen Lagerteil 78 eingespannt. Mittels dieser Schraube 77 ist das Lagerteil 78 zugleich auch an der Innenseite des Verbindungsstücks 5' fixiert. Über eine Brücke 79 ist ein vertikaler, schenkelartiger Träger 80 mittig zwischen den beiden Schenkeln 21' der Resonanzfedern 11 angeordnet, an dem beidseitig die Piezoelemente 1 befestigt sind, an welchen die Federschenkel 21' federnd anliegen. Auch hier bilden die Federschenkel 21' wieder einen kurzen Hebelarm 23 zwischen dem Lagerteil 78 und der Auflagestelle A, an dem sie an den Piezoelementen 1 federnd anliegen sowie längere Hebelarme 24, die über die Bogenabschnitte 26 mit den Endabschnitten 25 verbunden sind.
- Wie beim Ausführungsbeispiel der Fig. 1 und 2 sind auch hier Justiereinrichtungen mit je einer Regulierfeder 30 und Stellschrauben 29 sowie Kontermuttern 28 vorgesehen, die in analoger Weise wie die Ausführungsform der Fig. 2 angeordnet sind und funktionieren.
- Wie beim Ausführungsbeispiel der Fig. 7 sind auch hier die beiden Fluidpumpen 15 über Verbindungsleitungen 17 und 18 auf einen gemeinsamen Ausgang 19 geschaltet.
- Bei allen Ausführungsbeispielen, bei denen die Resonanzfeder als Blattfeder 21 ausgebildet ist und das Aufbauprinzip der Fig. 1 und 2 verwirklicht ist, d. h. bei den Ausführungsbeispielen der Fig. 2 bis 4 sowie 5 bis 10, wird in vorteilhafter Weise zur Erhöhung der Arbeitsleistung die Hebelübersetzung ausgenutzt, die zwischen dem kurzen Hebel 23 und dem längeren Hebel 24 der Blattfeder besteht und die dazu führt, dass das Schwingsystem, das die Fluidpumpe 15 zu betätigen hat, auch bei minimalen Auslenkungen des Piezoelements 1 wesentlich größere Schwingungsamplituden ausführt, die zur Betätigung des Pumporgans 14 genutzt werden.
- Auch bei dem Ausführungsbeispiel der Fig. 11 wird eine solche Hebelübersetzung ausgenutzt. Dabei sind zwei in einem horizontalen unteren Schenkel 81 festsitzend befestigte, als Blattfedern 21/6 ausgebildete Resonanzfedern 11/2 vorgesehen. Zwischen diesen vertikalen Blattfedern 21/6 ist auf dem Schenkel 81 mittig ein Piezoelement 1 angeordnet, das seine Auslenkungen in vertikaler Richtung, also parallel zu den Blattfedern 21/6 ausführt.
- Zur Übertragung der vertikalen Auslenkungen des Piezoelements 1 auf die beiden Blattfedern 21/6 sind zwei zueinander rautenartig angeordnete gleichschenklige Kniegelenke vorgesehen, die jeweils aus einem unteren Hebel 85 und einem oberen Hebel 86 sowie einem diese beiden Hebel 85 und 86 miteinander verbindenden Gelenk 87 bestehen, wobei das Gelenk.87 durch einen Verbindungsstab 88 jeweils mit einer Blattfeder 21/6 verbunden ist. Durch diese Kniegelenke werden die vertikalen Auslenkungen des Piezoelements 1 in horizontale Bewegungen umgesetzt, so dass die beiden Blattfedern 21/6 jeweils eine nach außen gerichtete Auslenkung erfahren.
- Um eine federnde Belastung des Piezoelements 1 durch die beiden sich darauf abstützenden Hebel 85 zu erhalten, sind beide Gelenke 87 durch eine Zugfeder 91, die justierbar sein sollte, miteinander verbunden. Die beiden oberen Hebel 86 der beiden Kniegelenke stützen sich an der Unterseite des Schenkels 4 ab.
- Oberhalb des oberen Schenkels 4 sind die Enden der jeweils längeren Hebelarme 24 der Blattfedern 21/6 mit außenseitig angebrachten Resonanzmassen 12 versehen und zugleich über Stößel 13 mit den Pumporganen 14 einer Doppelfluidpumpe 15/1 kraft- und bewegungsübertragend verbunden, so dass ihre Schwingbewegungen die Pumporgane 14 betätigen.
- Dabei durchragen die Blattfedern 21/6 jeweils Ausnehmungen 89 und 90 des oberen Schenkels 4, auf dem die Doppelfluidpumpe 15/1 mittig angeordnet ist.
- Mit Hilfe von auch bei diesem Ausführungsbeispiel vorgesehener Regulierfedern 30 und Stellschrauben 29, lässt sich die Eigenfrequenz der beiden Blattfedern 21/6 jeweils in gewissem Umfang justieren, so dass auch hierbei in einfacher Weise Synchronismus zwischen der Eigenfrequenz der beiden Schwingsysteme und dem Arbeitszyklus bzw. der Arbeitsfrequenz des Piezoelements 1 erreicht werden kann.
- Bei der in Fig. 11 dargestellten Anordnung ist die Auslenkamplitude der oberen Blattfederenden etwa sechsmal größer als die vertikale Auslenkung des Piezoelementes 1.
- Zu erwähnen ist noch, dass als Pumporgane statt der in den Ausführungsbeispielen erwähnten Pumpmembranen auch Pumpkolben verwendet werden können.
Claims (22)
- Piezoelektrischer Pumpenantrieb, insbesondere für Luftpumpen mit einer Membran als Pumporgan, bei dem ein Resonanzschwingsystem, das wenigstens eine mittels einer Resonanzfeder (11) federelastisch gelagerte Resonanzmasse (12) aufweist und dessen Schwingungen von wenigstens einem elektrisch aktivierten Piezoelement (1) erzeugt werden, das Pumporgan (14) oszillierend antreibt, wobei das Piezoelement (1) über die mit der Resonanzmasse (12) versehene Resonanzfeder (11) mit dem Pumporgan (14) in kraft- und bewegungsübertragender Antriebsverbindung steht,
dadurch gekennzeichnet,
dass als Resonanzfeder (11/1) und Träger der Resonanzmasse(12) wenigstens eine solche stab-, blatt-oder bandförmige Feder (21, 21/1 bis 21/6) vorgesehen ist, auf welche das Piezoelement (1) an einem kurzen Hebelarm (23, 23/4, 23/6) einwirkt, und die an einem längeren Hebelarm (24, 24/4, 24/6) die Resonanzmasse (12) trägt, so dass zwischen den antreibenden Bewegungsamplituden des Piezoelements (1) und den resultierenden Bewegungsamplituden der Resonanzmasse (12) eine positive mechanische Wegübersetzung besteht. - Piezoelektrischer Pumpenantrieb nach Anspruch 1, dadurch gekennzeichnet, dass die Resonanzfeder (11) aus einer Blattfeder (21, 21/1 bis 21/3) besteht.
- Piezoelektrischer Pumpenantrieb nach Anspruch 1, dadurch gekennzeichnet, dass die Resonanzfeder (11) aus einem wenigstens einen geraden Abschnitt aufweisenden Federdraht besteht.
- Piezoelektrischer Pumpenantrieb nach Anspruch 2 oder 3, dadurch gekennzeichnet, dass die aus wenigstens einer Blattfeder (21) oder aus wenigstens einem Federdraht bestehende Resonanzfeder (11) mit ihrem einen Ende (22) ortsfest an einem das Piezoelement (1) und die Pumpe (15) tragenden starren Gestell (2) so eingespannt ist, dass sie mit einem kurzen Hebelarm (23) in geringer Entfernung vom eingespannten Ende (22) auf dem Piezoelement (1) federnd aufliegt und dass der längere, die Resonanzmasse (12) tragende Hebelarm (24) mit dem Pumporgan (14) verbundenen ist.
- Piezoelektrischer Pumpenantrieb nach Anspruch 4, dadurch gekennzeichnet, dass der auf dem Piezoelement (1) federnd aufliegende Abschnitt der Resonanzfeder (21) über einen Bereich, der einen Teil des kurzen Hebelarms (23) und wenigstens einen Teil des längeren Hebelarms (24) umfaßt, als in sich starres Teil ausgebildet ist.
- Piezoelektrischer Pumpenantrieb nach Anspruch 4 oder 5, dadurch gekennzeichnet, dass die Resonanzfeder (21) an einem ihren längeren Hebelarm (24) verlängernden Abschnitt (25') eine Balancemasse (27) trägt, die kleiner ist als die Resonanzmasse (12).
- Piezoelektrischer Pumpenantrieb nach Anspruch 4 oder 5, dadurch gekennzeichnet, dass der längere Hebelarm (24) der Resonanzfeder (11) einen rückwärts gebogenen Endabschnitt (25) aufweist, an dem die Resonanzmasse (12) befestigt ist.
- Piezoelektrischer Pumpenantrieb nach Anspruch 7, dadurch gekennzeichnet, dass am freien Ende des rückwärts gebogenen Endabschnitts (25) der Resonanzfeder (11) in einem Abstand von der Resonanzmasse (12) zusätzlich eine kleinere Balancemasse (27) angeordnet ist, die eine zumindest annähernde Parallelschwingung des Endabschnitts (25, 25') zu seiner Erstreckungsrichtung bewirkt.
- Piezoelektrischer Pumpenantrieb nach Anspruch 4 oder 5, dadurch gekennzeichnet, dass einer am Gestell (2) eingespannten ersten Resonanzfeder (21/1) auf der vom Piezoelement (1) abgewandten Seite eine zweite ebenfalls am Gestell (2) eingespannte Resonanzfeder (21/2) in Parallellage zugeordnet ist, deren bzw. dessen freies Ende nach Art eines Parallelogramms über einen Verbindungssteg (36) gelenkig mit dem freien Ende der ersten Resonanzfeder (21/1) verbunden ist.
- Piezoelektrischer Pumpenantrieb nach Anspruch 9, dadurch gekennzeichnet, dass die beiden Resonanzfedern (21/1, 21/2) über den Verbindungssteg (36) mit dem Pumporgan (14) in kraftübertragender Verbindung stehen.
- Piezoelektrischer Pumpenantrieb nach einem der Ansprüche 4 bis 10, dadurch gekennzeichnet, dass auf den längeren Hebelarm (24) der Resonanzfeder (11) eine Regulierfeder (30) einwirkt, deren auf die Resonanzfeder (21) wirksame Vorspannung mittels einer Stellschraube (29) einstellbar ist.
- Piezoelektrischer Pumpenantrieb nach Anspruch 11, dadurch gekennzeichnet, dass der Abstand des Angriffspunktes der Regulierfeder (30) auf der Resonanzfeder (11) von dem Angriffspunkt (A) des Piezoelements (1) annähernd der Länge des zwischen dem eingespannten Ende (22) der Resonanzfeder (21) und dem Angriffspunkt (A) des Piezoelements (1) liegenden kurzen Hebelarms (23) entspricht.
- Piezoelektrischer Pumpenantrieb nach einem der Ansprüche 1 bis 3, dadurch gekennzeichnet, dass die Resonanzfeder (21/3) drei zueinander parallele Schenkelabschnitte (41, 42, 43) aufweist, die jeweils paarweise durch Bogenabschnitte (26, 26') miteinander verbunden sind.
- Piezoelektrischer Pumpenantrieb nach Anspruch 13, dadurch gekennzeichnet, dass die drei parallelen Schenkelabschnitte (41, 42, 43) unter sich zumindest annähernd gleich lang sind.
- Piezoelektrischer Pumpenantrieb nach Anspruch 13, dadurch gekennzeichnet, dass ein erster das eine Ende der Resonanzfeder (21/3) bildender Schenkelabschnitt (41) unter dem Einfluß einer Andruckkraft mit dem Piezoelement (1) in kraft- und bewegungsübertragender Verbindung steht und ein dritter, das zweite Ende der Resonanzfeder bildender Schenkelabschnitt (43) mit dem Pumporgan (14) einer Pumpe (15) in kraft- und bewegungsübertragender Verbindung steht.
- Piezoelektrischer Pumpenantrieb nach einem der Ansprüche 13 bis 15, dadurch gekennzeichnet, dass der mit dem Pumporgan (14) in Verbindung stehende Schenkelabschnitt (43) mit einer Resonanzmasse (12') und einer Balancemasse (27) versehen ist.
- Piezoelektrischer Pumpenantrieb nach Anspruch 16, dadurch gekennzeichnet, dass auch der mittlere Schenkelabschnitt (42) mit einer Resonanzmasse (12/1) versehen ist.
- Piezoelektrischer Pumpenantrieb nach einem der Ansprüche 1 bis 3, dadurch gekennzeichnet, dass das Piezoelement (1) zwischen zwei in Parallellage in einem Gestell (2/4) eingespannten Resonanzfedern (21/6) angeordnet ist und über zwei sich gegenüberliegende gleichschenklige Kniegelenke mit den Resonanzfedern (21/6) in kraft- und bewegungsübertragender Verbindung steht.
- Piezoelektrischer Pumpenantrieb nach Anspruch 18, dadurch gekennzeichnet, dass die jeweils mit Resonanzmassen (12/1) versehenen Enden der beiden Resonanzfedern (21/6) jeweils kraft- und bewegungsübertragend mit einem Pumporgan (14) einer Pumpe (15/1) verbunden sind.
- Piezoelektrischer Pumpenantrieb nach einem der Ansprüche 1 bis 3, dadurch gekennzeichnet, dass eine ebene, an ihren beiden Enden mit Resonanzmassen (12/1) versehene und mit jeweils einem Pumporgan (14) kraft- und bewegungsübertragend verbundene Resonanzfeder (21/5) auf zwei zwischen den Resonanzmassen (12/1) symmetrisch zu ihrer Längsmitte angeordneten Stützlagern aufliegt und auf der den Stützlagern (65) gegenüberliegenden Seite in der Längsmitte kraftübertragend mit dem Piezoelement (1) in Verbindung steht.
- Piezoelektrischer Pumpenantrieb nach einem der Ansprüche 1 bis 20, dadurch gekennzeichnet, dass zwei gleiche Resonanzschwingsysteme mit jeweils einem Piezoelement (1) in räumlicher Parallelanordnung jeweils eine Pumpe (15, 15/1) betreiben und dass die beiden Pumpen (15) auf einen gemeinsamen Ausgang (16) geschaltet sind.
- Piezoelektrischer Pumpenantrieb nach Anspruch 21, dadurch gekennzeichnet, dass die Pumpe (15/1) zwei Pumporgane (14) aufweist, die jeweils mit der Resonanzfeder (21) eines Schwingsystems in kraft- und bewegungsübertragender Verbindung stehen.
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102006043219A DE102006043219B3 (de) | 2006-09-11 | 2006-09-11 | Piezoelektrischer Pumpenantrieb |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP1898087A2 true EP1898087A2 (de) | 2008-03-12 |
| EP1898087A3 EP1898087A3 (de) | 2011-05-11 |
Family
ID=38959689
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP07014364A Withdrawn EP1898087A3 (de) | 2006-09-11 | 2007-07-21 | Piezoelektrischer Pumpenantrieb |
Country Status (2)
| Country | Link |
|---|---|
| EP (1) | EP1898087A3 (de) |
| DE (1) | DE102006043219B3 (de) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2133567A3 (de) * | 2008-06-10 | 2013-01-16 | Siegfried Richter | Elektrischer Schwingantrieb |
| US9802214B2 (en) | 2010-07-04 | 2017-10-31 | Ice-World Holding B.V. | Play fountain |
| US10166568B2 (en) | 2013-03-22 | 2019-01-01 | Hoeks Beheer B.V. | Assembly, in particular a play fountain |
| CN113482891A (zh) * | 2021-07-21 | 2021-10-08 | 合肥工业大学 | 一种谐振频率可调的音叉式驱动器驱动的压电泵 |
| CN114109786A (zh) * | 2021-12-01 | 2022-03-01 | 合肥工业大学 | 一种基于对称式同相放大机构的压电堆栈泵 |
| CN114640270A (zh) * | 2022-04-12 | 2022-06-17 | 合肥工业大学 | 一种基于菱形环和对称反相放大杆的二级驱动压电堆栈泵 |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101922442A (zh) * | 2010-03-05 | 2010-12-22 | 吉林大学 | 双腔双驱动压电叠堆泵 |
| CN113007077B (zh) * | 2020-04-22 | 2022-06-07 | 合肥工业大学 | 一种阵列式压电隔膜泵 |
| CN114382682B (zh) * | 2022-01-24 | 2023-06-13 | 枣庄学院 | 双谐振柱塞泵 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61103580U (de) * | 1984-12-14 | 1986-07-01 | ||
| JP2887677B2 (ja) * | 1988-08-11 | 1999-04-26 | 株式会社日本計器製作所 | 圧電ポンプ |
| US6425740B1 (en) * | 2000-07-28 | 2002-07-30 | Sarcos, L.C. | Resonator pumping system |
| DE10234584B3 (de) * | 2002-07-30 | 2004-04-08 | Festo Ag & Co. | Piezoelektrisch betätigbare Pumpe |
-
2006
- 2006-09-11 DE DE102006043219A patent/DE102006043219B3/de not_active Expired - Fee Related
-
2007
- 2007-07-21 EP EP07014364A patent/EP1898087A3/de not_active Withdrawn
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2133567A3 (de) * | 2008-06-10 | 2013-01-16 | Siegfried Richter | Elektrischer Schwingantrieb |
| US9802214B2 (en) | 2010-07-04 | 2017-10-31 | Ice-World Holding B.V. | Play fountain |
| US10166568B2 (en) | 2013-03-22 | 2019-01-01 | Hoeks Beheer B.V. | Assembly, in particular a play fountain |
| CN113482891A (zh) * | 2021-07-21 | 2021-10-08 | 合肥工业大学 | 一种谐振频率可调的音叉式驱动器驱动的压电泵 |
| CN114109786A (zh) * | 2021-12-01 | 2022-03-01 | 合肥工业大学 | 一种基于对称式同相放大机构的压电堆栈泵 |
| CN114109786B (zh) * | 2021-12-01 | 2023-07-21 | 合肥工业大学 | 一种基于对称式同相放大机构的压电堆栈泵 |
| CN114640270A (zh) * | 2022-04-12 | 2022-06-17 | 合肥工业大学 | 一种基于菱形环和对称反相放大杆的二级驱动压电堆栈泵 |
| CN114640270B (zh) * | 2022-04-12 | 2024-04-30 | 合肥工业大学 | 一种基于菱形环和对称反相放大杆的二级驱动压电堆栈泵 |
Also Published As
| Publication number | Publication date |
|---|---|
| DE102006043219B3 (de) | 2008-02-28 |
| EP1898087A3 (de) | 2011-05-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1898087A2 (de) | Piezoelektrischer Pumpenantrieb | |
| EP2133567B1 (de) | Elektrischer Schwingantrieb | |
| DE3926348C2 (de) | ||
| DE2830694C2 (de) | Tintentröpfchen-Druckkopf | |
| EP1991777A1 (de) | Linearverdichter und antriebsaggregat dafür | |
| DE3030639A1 (de) | Vibrator | |
| EP1539437A1 (de) | Elektrisches kleingerät mit einer antriebseinrichtung zur erzeugung einer oszillierenden bewegung | |
| EP3389912B1 (de) | Linearreibschweissmaschine | |
| DE60309560T2 (de) | Linearantrieb für schwingende Einrichtung | |
| EP1454679A1 (de) | Siebvorrichtung | |
| EP3469703A1 (de) | Ultraschallmotor | |
| EP2208693A2 (de) | Vibrationslinearförderer | |
| EP2022734B1 (de) | Vibrationslinearförderer | |
| AT511949A4 (de) | Spannwellensieb | |
| EP1142651A2 (de) | Siebvorrichtung | |
| DE602004003579T2 (de) | Flexible verbindungsglieder für eine maschine umfassende erntevorrichtung zum ernten von früchten, beeren und dergleichen | |
| WO2010076113A1 (de) | Schwingungsantrieb | |
| DE102007031639B4 (de) | Vibrationslinearförderer | |
| EP0794136B1 (de) | Resonanzschwingförderer | |
| DE2045152C3 (de) | Schwingmotor mit bilaminaren Biegeschwingern für elektrisch angetriebene Trockenrasierapparate | |
| DE102007023963B4 (de) | Vorrichtung für einen Schwingungserreger | |
| DE202013008780U1 (de) | Spannwellensiebvorrichtung | |
| DE4236574C2 (de) | Linearaktuator | |
| DE3786067T2 (de) | Vorrichtung zum Zerbrechen einer Fläche. | |
| DE102011054300A1 (de) | Linear-Vibrationsförderer |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A2 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IS IT LI LT LU LV MC MT NL PL PT RO SE SI SK TR |
|
| AX | Request for extension of the european patent |
Extension state: AL BA HR MK YU |
|
| PUAL | Search report despatched |
Free format text: ORIGINAL CODE: 0009013 |
|
| AK | Designated contracting states |
Kind code of ref document: A3 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IS IT LI LT LU LV MC MT NL PL PT RO SE SI SK TR |
|
| AX | Request for extension of the european patent |
Extension state: AL BA HR MK RS |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN WITHDRAWN |
|
| 18W | Application withdrawn |
Effective date: 20111109 |