EP2082388B1 - Procédé et dispositif pour détecter des objets cachés dans la circulation routière - Google Patents
Procédé et dispositif pour détecter des objets cachés dans la circulation routière Download PDFInfo
- Publication number
- EP2082388B1 EP2082388B1 EP07821156.2A EP07821156A EP2082388B1 EP 2082388 B1 EP2082388 B1 EP 2082388B1 EP 07821156 A EP07821156 A EP 07821156A EP 2082388 B1 EP2082388 B1 EP 2082388B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- vehicle
- information
- sensors
- vehicles
- surrounding area
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Not-in-force
Links
Images


Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/161—Decentralised systems, e.g. inter-vehicle communication
- G08G1/163—Decentralised systems, e.g. inter-vehicle communication involving continuous checking
Definitions
- the invention relates to methods for detecting obscured objects in traffic with the features of the preamble of claim 1 and an apparatus for performing the method.
- the first 3 points bring with it the biggest danger.
- the 4th is not assigned a high risk potential, as a road user in such a situation will be as careful as possible and otherwise falls under point 2.
- driver assistance systems in recent decades, which are based on classic environment sensors such as video or beam sensors. But even for these sensors, there are limitations that affect the detection area. Such may e.g. Objects, fog or snow limit the coverage area. In critical traffic situations such. B. impending collisions with other vehicles, a driver often can not respond quickly enough or not appropriate to the situation.
- the font GB 2405279A discloses a collision avoidance system for a motor vehicle for detection of critical objects, the use of environment detection sensors such as camera, Lidarsysteme and also provides a GPS system for determining the position of the EGO vehicle and communication between the vehicles.
- the font US 5983161A describes a control system for a vehicle with a warning function for collision avoidance.
- the environment around the vehicle is monitored with various sensors and a camera and relevant objects are displayed to the driver in the video image.
- the disadvantage is that hidden collision-relevant objects can not be displayed to the driver in the video image.
- the object of the invention is to provide a method which overcomes the previous limitations of the prior art with respect to the environment detection and recognizes the particular hidden objects in traffic and reliably displays these to the driver.
- the embodiment of the method is particularly advantageous in that the received information is forwarded to a separate driver assistance system (14) and, in the case of detected vehicles in the environment having an activated driver assistance system, the transmitted information is supplied to the respective driver assistance system of the respective vehicle ,
- a stereo camera with a 12-bit dynamic range is used as the visual sensor, which carries out an object tracking and an object tracking. This results in a kind of reduction the amount of data to be evaluated, when modifying the environment model.
- a particularly advantageous embodiment of the method according to the invention is characterized in that the transmitted information takes place in the form of position and dynamic information packets (29).
- the packet-oriented approach addresses all packet-oriented transmission protocols.
- the device comprising at least one memory, at least one computer unit (15) and at least one interface (17) for the data exchange, wherein the information from the neighboring vehicles via the communication system (60) and via the interface (17 ) are forwarded to the computer unit (15), the data of the own vehicle (1) by the sensors (10, 20, 30) determined, updated and forwarded via the sensor data processing (50) to an environment model (50), wherein under real-time conditions the own position, the environment and the position of the neighboring vehicles is determined via the position determination system (12) and fed to the computer via the interface (17) to the environment model (50), from the received information and the determined data a prediction of the trajectory of the own vehicle, the environment and the adjacent vehicles is carried out, which at risk S signaling to the driver via an output unit (80) or by intervention of the vehicle safety and / or driver assistance systems (13, 14) in the movement path of the own vehicle or signaling the engagement of the movement path of the vehicle (1) with the adjacent vehicles ,
- the vehicle 1 there are at least one communication, a position determination, vehicle safety, driver assistance system 11/12/13/14, and sensors 10, 20, 30 and a sensor data processing 40, and at least one computer unit 15 with memory via wired or mobile Data bus lines performs a data exchange with the system elements and sensors, wherein on the computer unit a dynamically changeable environment model 50, the sensor data processing unit 40 and a situation analysis 70 is performed.
- the environment model 50, the sensor data processing unit 40 and the situation analysis are preferably constructed as modules.
- the communication system 11 exchanges information over a cellular network such as GSM and the communication system 60 is used for the transmission and reception of information from vehicle to vehicle.
- GSM Global System for Mobile Communications
- the communication system 60 is used for the transmission and reception of information from vehicle to vehicle.
- all communication functionality will be performed in a single communication system.
- an electronic display is used in the vehicle 80, which can be mounted stationary and / or variable visible to the driver in the passenger compartment.
- a method is used whose detection range is not limited by optical visibility.
- One such method is the vehicle-vehicle communication already mentioned.
- the communication system 60 is at least configured for vehicle-to-vehicle communication.
- a standardized, non-optical, radio-based information transmission method supporting system for the communication between at least two vehicles or participants is used as a communication system.
- the communication system 110 supports various mobile transmission methods that establish information distribution in the so-called point-to-point connection, whereas the communication system 60 performs a broadcast mode.
- Positioning systems 12 serve to determine the own position. Positioning systems are GPS transmitters and receivers as well as navigation systems. According to the invention, integrated position determination systems that combine both functionalities in one device can also be used. As vehicle safety systems 13, all braking systems available in the vehicle can be used with electronic control. Vehicle safety systems may include the Electronic Break System (EBS) 131, the Engine Management System (EMS) 132, Antilock Braking System (ABS) 133, Traction Control (ASR), Electronic Stability Program (ESP), Electronic Differential Lock (EDS), Transmission Control Unit (TCU), Electronic Brake Force Distribution (EBV) and / or Engine Drag Torque Control (MSR).
- EBS Electronic Break System
- EMS Engine Management System
- ABS Antilock Braking System
- ASR Traction Control
- EDS Electronic Stability Program
- EDS Electronic Differential Lock
- TCU Transmission Control Unit
- EVS Electronic Brake Force Distribution
- MSR Engine Drag Torque Control
- Driver assistance systems 14 are electronic ancillary devices in vehicles to assist the driver in certain driving situations. Here are often safety aspects, but also the increase in ride comfort in the foreground. These systems partly autonomously or autonomously intervene in drive, control (eg gas, brake) or signaling devices of the vehicle or warn the driver shortly before or during critical situations by means of suitable man-machine interfaces.
- control eg gas, brake
- signaling devices of the vehicle or warn the driver shortly before or during critical situations by means of suitable man-machine interfaces.
- driver assistance systems are, for example, parking assistance (sensor arrays for obstacle and distance detection), brake assist (BAS), cruise control, adaptive cruise control (ACC) 141, distance warning, turn assistant, traffic jam assistant, lane detection system, lane departure warning / lane assistant (lane departure warning, LDW )) 142, lane keeping support), lane change assist, lane change support, Intelligent Speed Adaptation (ISA), adaptive cornering light, tire pressure monitoring system, driver condition detection, traffic sign recognition, platooning, automatic emergency braking (ANB), headlamp dipping and dipping assist, night vision system.
- parking assistance sensor arrays for obstacle and distance detection
- BAS brake assist
- ACC adaptive cruise control
- ACC adaptive cruise control
- ACC adaptive cruise control
- ACC distance warning, turn assistant, traffic jam assistant
- lane detection system lane departure warning / lane assistant (lane departure warning, LDW ))
- LDW lane departure warning
- ISA Intelligent Speed Adaptation
- adaptive cornering light tire pressure monitoring system
- driver condition detection traffic sign recognition
- the construction in Fig. 2 shows a multi-sensorial environment detection with networked environment model.
- the core of the method according to the invention are the steps of sensor data processing 40, formation and completion of the environment model 50 by means of the sensor data processing 40 and the vehicle-to-vehicle communication 60, and the delivery of the environment model to a situation analysis.
- the environment model 50 knows an interface to the vehicle safety system and driver assistance systems and at the same time enables validation of the environmental detection.
- lidar 10 based on scanning or fixed laser beams and radar 20 with features for long-range radar and near-field radar and visual sensors in the form of cameras 30, both for the visible range and for the invisible range, which includes, for example, the heat radiation.
- a radar system measures the distance to and at the same time the speed of objects by evaluating the object backscatter.
- various possibilities are used such as pulse radar, FMCW (frequency modulated continuous wave) and FSK (frequency shift keying) modulation, as well as combinations thereof.
- Adaptive Cruise Control (ACC) uses a far-range radar that can measure distances up to 150 meters and spot objects as punctiform.
- Short-range radar uses several sensors (transmitter and receiver) at the same time, each with a much larger opening angle (up to +/- 60 °). By coupling evaluation of the received signals, it is also possible to locate several objects up to a distance of 30 meters. While the far-field radar operates at a frequency of 77 GHz, the short-range radar uses the frequency range around 24 GHz and 79 GHz, respectively. An important advantage of radar is the insensitivity of the radar wave propagation to weather influences such as rain, snow or fog.
- Non-scanning systems with multiple laser beams and photodiodes become like the far-range radar for distance control (ACC) are used, whereby the larger number of beams a better lateral resolution compared to the long-range radar is achieved.
- ACC distance control
- predominantly scanning lidar is used, which in principle allows a complete all-round view (360 ° opening angle). To compensate for pitching movements of the vehicle, it is intended to use several scanning plane.
- Cameras offer a high-resolution picture of the driving environment, in contrast to the distance-measuring principles of radar and lidar. Since the contrast ratios in the road traffic are often very large, a hechdynamische cameras with, for example, a 12-bit dynamic range is used according to the invention. While grayscale cameras can be used for track recognition, color cameras are provided for reliable amp detection.
- a stereo camera with a horizontal base, such as the human eye pair, and determines the disparities between the two images mainly on vertical edges for distance determination.
- movable cameras such as scanning attachments in lidar or radar
- additional control in the viewing direction e.g. based on the attention.
- thermal imaging cameras for pedestrian detection, since the temperature of the human body is a reliable detection feature.
- the block sensor data processing 40 takes into account in a special way the additional requirements of a multi-sensorial approach.
- sensor data is correlated, both the mutual position of the sensors and a common time base are related to each other.
- a location calibration for determining the geometric relation of the objects and vehicles to each other a time synchronization for determining the temporal relation of the objects and vehicles to each other and the sensor modeling, in which a consideration of sensor properties received.
- the own vehicle which of course is provided with localized information e.g. of navigation maps or positioning systems 12 is used accordingly in conjunction.
- Stereo Cameras e.g. are operated synchronously to obtain both measurements at the same time.
- asynchronous systems are also used if the measurements are provided with a time stamp which is supplied by a common system clock (master clock).
- the vehicle-to-vehicle communication via the communication system 60.
- Receiving and updating the information from the neighboring vehicles is done in the way that the neighboring vehicles 2 and 3 their position and dynamic information packets 29 (PDP), as in Figure 3 by way of example, via the communication system located in the respective vehicle and responsible for the exchange of information between at least two vehicles for the vehicle to vehicle continuously send communication.
- PDP position and dynamic information packets 29
- the position and dynamic information packages 2 representing and distributing the respective vehicle contain information, e.g. the vehicle identifier 21, the GPS data with accurate lane keeping information 22, the individual vehicle parameters 23, e.g. the vehicle geometry with length 231, width 232, turning circle, the vehicle type (car / off-road vehicle / small truck / truck / etc.) 233, the previously known information of the vehicle dynamics 24 with max. Longitudinal acceleration and deceleration 241, max. Lateral acceleration 242, max. Vehicle speed 23, the current vehicle speed 245, the longitudinal acceleration, the lateral acceleration, the current yaw rate, the current steering angle.
- the position and dynamic information packs 29 contain information about the currently in the respective Vehicle active vehicle safety systems 25 and driver assistance systems 25, as well as information about the lane parameters 26, such as slope angle and estimated friction. Further fields are provided in the position and dynamic information packages 2 for optional information 27, such as the status of traffic lights or the position of recognized pedestrians.
- the position and dynamic information of all neighboring vehicles, with which the own vehicle communicates, are stored in a dynamically updated, internal memory of the computer unit 15, which can be configured as a database.
- the sending vehicle already has an active position and dynamics information packet in the database, i. it is already "recognized" by the receiving own vehicle, the data is updated with the latest position and dynamics information packets.
- the position and dynamics information packets 2 of a vehicle leaving the zone and no longer transmitting data after an active period are removed from the database.
- the updating and transmission of the own position and dynamics data of the own vehicle is done in such a way that the same data as described are recorded and calculated in the own vehicle and the entire position and dynamic data packet are transmitted by the own communication system to the neighboring vehicles.
- the position data of the first positioning system which may be implemented as a GPS receiver, is used as basic information. These data are forwarded to the environment model 50.
- the environment model 50 comprises a multiplicity of previously known object types which are structured to describe the driving environment in a so-called object catalog.
- each object there are a number of attributes that are either measured and determined with the sensors, for example, width, height, distance, speed, or in a very simple embodiment as a look-up table or in another embodiment in the already are recorded, such as number of lanes, assignment of traffic lights and speed limits.
- the objects are distinguished between static objects, i. Objects that are part of the infrastructure, such as lanes, traffic signs or peripheral buildings and dynamic objects.
- static objects i. Objects that are part of the infrastructure, such as lanes, traffic signs or peripheral buildings and dynamic objects.
- the description of the movement of dynamic objects is made by subordinate dynamics models, which are formulated relative to object-specific coordinate systems.
- Pedestrians or unprotected road users are treated separately, since both their recognition and the necessary shape and dynamic models, such as variable shape by arm and leg movements, abrupt changes of direction are possible and thus much more complex than z. B. in vehicles.
- the situation analysis 70 defines and describes the different levels of abstraction in the situation analysis, such as Distance to the vehicle ahead, taking into account the own speed, Einscherer situation, possible evasive maneuvers, formed according to the invention.
- the information from and communication with other vehicles and / or the infrastructure is used. The entire available information about the current situation is now stored in the extended environment model and is available to the situation analysis 70.
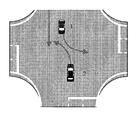
- the display in the vehicle 80 is either directly in the video image or as a virtual image from the point of view, we in Fig. 1 indicated, the bird's eye view presented. It is intended that the recognition results, such as vehicles or lane markings, enter directly into the image. If there are no video recordings available or the coverage of other sensors is greater than the camera field of view, the detected objects are displayed in a virtual image.
- Fig. 1 An ad in the vehicle is then as in Fig. 1 be shown, in the event that two vehicles 1 and 2 are facing left turn and one of the two will not see the oncoming traffic, as it is covered by the other left turn, the driver of the vehicle 2 would immediately recognize that he may not turn.
- the method it is advantageously possible to determine the danger emanating from an object on the basis of a situation analysis. If it is then a very high risk, the object will be highlighted in the ad and measures to avoid an accident initiated.
- measures are e.g. the tightening of the straps, the priming of the brake system. It is also thought to give the driver acoustic, haptic and visual cues to the driver that a dangerous situation is developing.
- the initiated measures are in turn transmitted via the communication system 60 to the environment in order to notify the measures introduced to the vehicles located in the vicinity.
- the relevant information is forwarded to the driver assistance systems in the vehicles 2 and 3, which are located in the immediate vicinity, in order to also expand their detection range.
- the driver of the individual vehicle is not in his actions by the evaluation of the Um chargeds vente, which has only a limited local range limited. As a result, the presence of certain local conditions at a certain time the driver made accessible, which then measures can be taken in an advantageous manner to avoid accidents, for example.
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Traffic Control Systems (AREA)
Claims (8)
- Procédé de détection d'objets masqués dans la circulation routière, dans lequel d'une part les alentours d'un véhicule et d'autre part des grandeurs de déplacement du propre véhicule sont détectés au moyen de capteurs, ceux-ci sont transmis en tant qu'information à des véhicules situés dans l'environnement au moyen d'une interface (17) de communication véhicule à véhicule (60) et sont reçus par les véhicules situés dans l'environnement, les étapes suivantes étant parcourues :a)les données des capteurs (10, 20, 30, 40) étendent un modèle d'environnement (50), au moins un capteur étant constitué en tant que caméra,b)le modèle d'environnement (50) étendu est reproduit de façon actualisée au moyen d'un afficheur (80) dans le propre véhicule,c)une analyse de situation (70) de l'environnement et une évaluation de la situation étant effectuées dans le propre véhicule,d) des objets qui représentent un risque d'accident sont visualisés sur l'afficheur avec une priorité haute,e)des étapes prédéfinies de réduction du risque d'accident sont activées dans le propre véhicule,f)l'information sur les étapes de réduction du risque d'accident mises en oeuvre est communiquée aux alentours par le biais du système de communication de communication véhicule à véhicule (60),caractérisé en ce queg) des résultats de la détection, tels qu'un véhicule ou des marquages de voie, sont entrés directement dans l'image vidéo de la caméra eth) si aucun enregistrement vidéo n'est disponible ou si la plage de détection d'autres capteurs est plus grande qu'un champ de vision de la caméra, des objets détectés dans une image virtuelle sont représentés selon l'angle de vision de la perspective aérienne.
- Procédé selon la revendication 1,
caractérisé en ce que
la transmission de l'information s'effectue au moyen de la transmission multicast et/ou unicast et/ou broadcast. - Procédé selon l'une des revendications précédentes,
caractérisé en ce que
les informations reçues sont analysées de façon priorisée, et les informations à transmettre sont envoyées de façon priorisée après un contrôle de pertinence. - Procédé selon l'une des revendications précédentes,
caractérisé en ce que
l'information reçue est transférée à un propre système d'assistance au conducteur (14) et, en cas de véhicules détectés dans les alentours qui présentent un système d'assistance au conducteur activé, les informations envoyées sont conduites au système d'assistance au conducteur respectif du véhicule respectif. - Procédé selon l'une des revendications précédentes,
caractérisé en ce que,
les étapes prédéfinies de réduction du risque d'accident dans le véhicule (1) la tension des ceintures et/ou le pré-remplissage des systèmes de freins sont réalisées. - Procédé selon l'une des revendications précédentes,
caractérisé en ce que
le capteur (30) est une caméra stéréo avec une plage dynamique de 12 bits. - Procédé selon l'une des revendications précédentes,
caractérisé en ce que
l'information envoyée s'effectue sous la forme de paquets d'information de position et dynamique (29). - Dispositif de réalisation du procédé selon la revendication 1, comprenant au moins une mémoire, au moins une unité de calcul (15) et au moins une interface (17) pour l'échange de données et une unité d'affichage, les informations en provenance des véhicules voisins étant transférées via le système de communication (60) et via l'interface (17) vers l'unité de calcul (15),
les données du propre véhicule (1) étant déterminées par les capteurs (10, 20, 30), actualisées et transférées à un modèle d'environnement (50) via le traitement de données de capteurs (50),
la propre position, l'environnement et la position des véhicules voisins étant déterminés dans des conditions de temps réel via le système de détermination de position (12) et conduits au calculateur via l'interface (17) avec le modèle d'environnement (50), une signalisation s'effectuant, en cas de risque, via l'interface avec une unité de sortie (80) vers le conducteur ou par intervention au moyen des systèmes de sécurité du véhicule et/ou d'assistance au conducteur (13, 14) dans la trajectoire du propre véhicule et/ou par la signalisation de l'intervention dans la trajectoire du véhicule (1) aux véhicules voisins
caractérisé en ce que
l'unité d'affichage est constituée de telle sorte que des résultats de détection, tels qu'un véhicule ou des marquages de voies, sont entrés directement dans l'image vidéo de la caméra et, si aucun enregistrement vidéo n'est disponible ou si la plage de détection d'autres capteurs est plus grande qu'un champ de vision de la caméra, des objets détectés dans une image virtuelle sont représentés selon l'angle de vision de la perspective aérienne.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102006049101 | 2006-10-13 | ||
| PCT/EP2007/060788 WO2008043795A1 (fr) | 2006-10-13 | 2007-10-10 | Procédé et dispositif pour détecter des objets cachés dans la circulation routière |
| DE102007048809A DE102007048809A1 (de) | 2006-10-13 | 2007-10-10 | Verfahren und Vorrichtung zur Erkennung von verdeckten Objekten im Straßenverkehr |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP2082388A1 EP2082388A1 (fr) | 2009-07-29 |
| EP2082388B1 true EP2082388B1 (fr) | 2015-08-19 |
Family
ID=38834995
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP07821156.2A Not-in-force EP2082388B1 (fr) | 2006-10-13 | 2007-10-10 | Procédé et dispositif pour détecter des objets cachés dans la circulation routière |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US8179281B2 (fr) |
| EP (1) | EP2082388B1 (fr) |
| DE (1) | DE102007048809A1 (fr) |
| WO (1) | WO2008043795A1 (fr) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102019102679A1 (de) * | 2019-02-04 | 2020-08-06 | Bayerische Motoren Werke Aktiengesellschaft | Verfahren, Vorrichtung, Computerprogramm und Computerprogrammprodukt zum Bereitstellen eines Bahnverlaufs eines Objekts für ein Fahrzeug |
Families Citing this family (103)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20060058829A1 (en) * | 2003-03-19 | 2006-03-16 | Sampson Douglas C | Intragastric volume-occupying device |
| US10117078B1 (en) | 2005-04-12 | 2018-10-30 | Ehud Mendelson | Medical information communication method |
| JP4254844B2 (ja) * | 2006-11-01 | 2009-04-15 | トヨタ自動車株式会社 | 走行制御計画評価装置 |
| JP4371137B2 (ja) * | 2006-11-10 | 2009-11-25 | トヨタ自動車株式会社 | 自動運転制御装置 |
| JP4525670B2 (ja) * | 2006-11-20 | 2010-08-18 | トヨタ自動車株式会社 | 走行制御計画生成システム |
| DE102008040077A1 (de) * | 2008-07-02 | 2010-01-07 | Robert Bosch Gmbh | Fahrerassistenzverfahren |
| US8169338B2 (en) * | 2008-07-25 | 2012-05-01 | GM Global Technology Operations LLC | Inter-vehicle communication feature awareness and diagnosis system |
| US8935055B2 (en) * | 2009-01-23 | 2015-01-13 | Robert Bosch Gmbh | Method and apparatus for vehicle with adaptive lighting system |
| JP5196004B2 (ja) | 2009-03-06 | 2013-05-15 | トヨタ自動車株式会社 | 運転支援装置 |
| DE102009020328A1 (de) * | 2009-05-07 | 2010-11-11 | Bayerische Motoren Werke Aktiengesellschaft | Verfahren zur Darstellung von unterschiedlich gut sichtbaren Objekten aus der Umgebung eines Fahrzeugs auf der Anzeige einer Anzeigevorrichtung |
| DE102009048493A1 (de) * | 2009-09-25 | 2011-04-07 | Valeo Schalter Und Sensoren Gmbh | Fahrerassistenzsystem für ein Fahrzeug, Fahrzeug mit einem Fahrerassistenzsystem und Verfahren zum Unterstützen eines Fahrers beim Führen eines Fahrzeugs |
| EP2302412B1 (fr) * | 2009-09-29 | 2012-08-15 | Volvo Car Corporation | Système et procédé d'évaluation d'une menace de collision avant d'un véhicule automobile |
| DE102009053707B4 (de) | 2009-11-18 | 2013-03-07 | Man Truck & Bus Ag | Vorrichtung zur Anzeige eines Hindernisses im Bewegungsbereich eines Nutzfahrzeugs |
| DE102010015686A1 (de) * | 2010-04-21 | 2011-10-27 | Audi Ag | Verfahren zum Betreiben eines Kraftfahrzeugs sowie Kraftfahrzeug |
| US8965676B2 (en) * | 2010-06-09 | 2015-02-24 | Toyota Motor Engineering & Manufacturing North America, Inc. | Computationally efficient intersection collision avoidance system |
| US8639437B2 (en) | 2010-06-09 | 2014-01-28 | Toyota Motor Engineering & Manufacturing North America, Inc. | Computationally efficient intersection collision avoidance system |
| KR101860966B1 (ko) | 2010-06-23 | 2018-07-05 | 콘티넨탈 테베스 아게 운트 코. 오하게 | 가속 물체 인식 및/또는 가속 물체 속성 인식을 위한 방법 및 시스템 그리고 그 방법의 이용 |
| US8405541B2 (en) * | 2010-09-01 | 2013-03-26 | Toyota Motor Engineering & Manufacturing North America, Inc. | Multi-range radar system |
| DE102011075674A1 (de) | 2011-05-11 | 2012-11-15 | Continental Teves Ag & Co. Ohg | Abstandsbestimmung mittels eines Kamerasensors |
| US8825089B2 (en) * | 2011-07-08 | 2014-09-02 | Matthew R. Godfrey | Systems and methods for tracking and monitoring an electronic device |
| US8706458B2 (en) * | 2011-10-05 | 2014-04-22 | International Business Machines Corporation | Traffic sensor management |
| DE102011116169A1 (de) * | 2011-10-14 | 2013-04-18 | Continental Teves Ag & Co. Ohg | Vorrichtung zur Unterstützung eines Fahrers beim Fahren eines Fahrzeugs oder zum autonomen Fahren eines Fahrzeugs |
| US8630806B1 (en) | 2011-10-20 | 2014-01-14 | Google Inc. | Image processing for vehicle control |
| US9146898B2 (en) * | 2011-10-27 | 2015-09-29 | Magna Electronics Inc. | Driver assist system with algorithm switching |
| DE102011086520A1 (de) * | 2011-11-17 | 2013-05-23 | Robert Bosch Gmbh | Schadensbegrenzung für ein Kraftfahrzeug in einer Gefahrensituation |
| CN103998951A (zh) | 2011-11-21 | 2014-08-20 | 大陆-特韦斯贸易合伙股份公司及两合公司 | 借助通信信号实现对象位置确定的方法和装置、以及该装置的使用 |
| EP2783233B1 (fr) | 2011-11-21 | 2019-05-22 | Continental Teves AG & Co. OHG | Procédé et dispositif pour déterminer la position d'objets dans la circulation routière sur la base de signaux de communication et utilisation de ce dispositif |
| JP5936258B2 (ja) * | 2012-03-22 | 2016-06-22 | 富士重工業株式会社 | 運転支援装置 |
| US10609335B2 (en) | 2012-03-23 | 2020-03-31 | Magna Electronics Inc. | Vehicle vision system with accelerated object confirmation |
| DE102012208254A1 (de) | 2012-05-16 | 2013-11-21 | Continental Teves Ag & Co. Ohg | Verfahren und System zur Erstellung eines aktuellen Situationsabbilds |
| DE102012210069A1 (de) | 2012-06-14 | 2013-12-19 | Continental Teves Ag & Co. Ohg | Verfahren und System zum Anpassen eines Anfahrverhaltens eines Fahrzeugs an eine Verkehrssignalanlage sowie Verwendung des Systems |
| KR101493360B1 (ko) * | 2012-07-30 | 2015-02-23 | 주식회사 케이티 | 주변 차량의 상태 변화 감지를 통한 차량 주행 관리 방법 및 시스템 |
| US9344989B2 (en) | 2012-09-06 | 2016-05-17 | Apple Inc. | System with wireless messages to enhance location accuracy |
| US9595195B2 (en) | 2012-09-06 | 2017-03-14 | Apple Inc. | Wireless vehicle system for enhancing situational awareness |
| DE102012221004A1 (de) | 2012-11-16 | 2014-05-22 | Continental Teves Ag & Co. Ohg | Verfahren und System zur verbesserten Bestimmung einer Eigenposition eines Fahrzeugs |
| DE102012023498B4 (de) | 2012-12-03 | 2024-10-10 | Continental Autonomous Mobility Germany GmbH | Verfahren und System zur selbsttätigen und/oder assistierenden Fahrzeugführung |
| US10796510B2 (en) * | 2012-12-20 | 2020-10-06 | Brett I. Walker | Apparatus, systems and methods for monitoring vehicular activity |
| DE102012024959A1 (de) * | 2012-12-20 | 2014-06-26 | GM Global Technology Operations LLC (n. d. Ges. d. Staates Delaware) | Verfahren zum Betreiben eines Fahrzeugs und Fahrzeug |
| DE102012025159A1 (de) | 2012-12-21 | 2014-06-26 | Continental Teves Ag & Co. Ohg | Verfahren und System zum Lernen von Verkehrsereignissen sowie Verwendung des Systems |
| DE102013201836A1 (de) | 2013-02-05 | 2014-08-07 | Continental Teves Ag & Co. Ohg | Verfahren und Vorrichtung zur Anwesenheitserkennung von Objekten in einer Fahrgastzelle eines Fahrzeugs |
| DE102013215100A1 (de) * | 2013-08-01 | 2015-02-05 | Bayerische Motoren Werke Aktiengesellschaft | Bereitstellen eines Umfeldmodells beim Ausfall eines Sensors eines Fahrzeugs |
| DE102013215098A1 (de) * | 2013-08-01 | 2015-02-05 | Bayerische Motoren Werke Aktiengesellschaft | Umfeldmodelle für Fahrzeuge |
| DE102013220312A1 (de) * | 2013-10-08 | 2015-04-09 | Bayerische Motoren Werke Aktiengesellschaft | Fortbewegungsmittel und Verfahren zum Informationsaustausch mit einem Fortbewegungsmittel |
| DE102013220526A1 (de) * | 2013-10-11 | 2015-04-16 | Bayerische Motoren Werke Aktiengesellschaft | Ausfallsicherere Sensorarchitektur für Fahrerassistenzsysteme |
| JP6107618B2 (ja) * | 2013-11-26 | 2017-04-05 | 株式会社デンソー | 周辺移動体表示装置 |
| US9666069B2 (en) * | 2014-02-14 | 2017-05-30 | Ford Global Technologies, Llc | Autonomous vehicle handling and performance adjustment |
| US9079587B1 (en) * | 2014-02-14 | 2015-07-14 | Ford Global Technologies, Llc | Autonomous control in a dense vehicle environment |
| DE102014007030A1 (de) * | 2014-05-13 | 2015-11-19 | GM Global Technology Operations LLC (n. d. Ges. d. Staates Delaware) | Verfahren und Vorrichtung zur Warnung vor einer kritischen Verkehrssituation |
| DE102014211013A1 (de) * | 2014-06-10 | 2015-12-17 | Continental Teves Ag & Co. Ohg | Fahrzeugkommunikationsgerät |
| JP6237580B2 (ja) * | 2014-11-13 | 2017-11-29 | 株式会社デンソー | モータ制御装置 |
| CN104442571B (zh) * | 2014-11-26 | 2016-06-01 | 重庆长安汽车股份有限公司 | 一种夜视导航集成系统及控制方法 |
| DE102015105784A1 (de) * | 2015-04-15 | 2016-10-20 | Denso Corporation | Verteiltes System zum Erkennen und Schützen von verwundbaren Verkehrsteilnehmern |
| US9818239B2 (en) * | 2015-08-20 | 2017-11-14 | Zendrive, Inc. | Method for smartphone-based accident detection |
| US10496766B2 (en) | 2015-11-05 | 2019-12-03 | Zoox, Inc. | Simulation system and methods for autonomous vehicles |
| US12265386B2 (en) | 2015-11-04 | 2025-04-01 | Zoox, Inc. | Autonomous vehicle fleet service and system |
| US9878664B2 (en) | 2015-11-04 | 2018-01-30 | Zoox, Inc. | Method for robotic vehicle communication with an external environment via acoustic beam forming |
| US9517767B1 (en) | 2015-11-04 | 2016-12-13 | Zoox, Inc. | Internal safety systems for robotic vehicles |
| US11283877B2 (en) | 2015-11-04 | 2022-03-22 | Zoox, Inc. | Software application and logic to modify configuration of an autonomous vehicle |
| US10745003B2 (en) | 2015-11-04 | 2020-08-18 | Zoox, Inc. | Resilient safety system for a robotic vehicle |
| US9910441B2 (en) | 2015-11-04 | 2018-03-06 | Zoox, Inc. | Adaptive autonomous vehicle planner logic |
| US9507346B1 (en) | 2015-11-04 | 2016-11-29 | Zoox, Inc. | Teleoperation system and method for trajectory modification of autonomous vehicles |
| US9606539B1 (en) | 2015-11-04 | 2017-03-28 | Zoox, Inc. | Autonomous vehicle fleet service and system |
| US9804599B2 (en) | 2015-11-04 | 2017-10-31 | Zoox, Inc. | Active lighting control for communicating a state of an autonomous vehicle to entities in a surrounding environment |
| US9632502B1 (en) | 2015-11-04 | 2017-04-25 | Zoox, Inc. | Machine-learning systems and techniques to optimize teleoperation and/or planner decisions |
| US9802661B1 (en) | 2015-11-04 | 2017-10-31 | Zoox, Inc. | Quadrant configuration of robotic vehicles |
| US9612123B1 (en) | 2015-11-04 | 2017-04-04 | Zoox, Inc. | Adaptive mapping to navigate autonomous vehicles responsive to physical environment changes |
| US9754490B2 (en) | 2015-11-04 | 2017-09-05 | Zoox, Inc. | Software application to request and control an autonomous vehicle service |
| US10401852B2 (en) | 2015-11-04 | 2019-09-03 | Zoox, Inc. | Teleoperation system and method for trajectory modification of autonomous vehicles |
| US9734455B2 (en) | 2015-11-04 | 2017-08-15 | Zoox, Inc. | Automated extraction of semantic information to enhance incremental mapping modifications for robotic vehicles |
| US10334050B2 (en) | 2015-11-04 | 2019-06-25 | Zoox, Inc. | Software application and logic to modify configuration of an autonomous vehicle |
| WO2017079341A2 (fr) | 2015-11-04 | 2017-05-11 | Zoox, Inc. | Extraction automatisée d'informations sémantiques pour améliorer des modifications de cartographie différentielle pour véhicules robotisés |
| US9916703B2 (en) | 2015-11-04 | 2018-03-13 | Zoox, Inc. | Calibration for autonomous vehicle operation |
| US9494940B1 (en) | 2015-11-04 | 2016-11-15 | Zoox, Inc. | Quadrant configuration of robotic vehicles |
| US9958864B2 (en) | 2015-11-04 | 2018-05-01 | Zoox, Inc. | Coordination of dispatching and maintaining fleet of autonomous vehicles |
| US9701239B2 (en) | 2015-11-04 | 2017-07-11 | Zoox, Inc. | System of configuring active lighting to indicate directionality of an autonomous vehicle |
| US9720415B2 (en) | 2015-11-04 | 2017-08-01 | Zoox, Inc. | Sensor-based object-detection optimization for autonomous vehicles |
| US10000124B2 (en) | 2015-11-04 | 2018-06-19 | Zoox, Inc. | Independent steering, power, torque control and transfer in vehicles |
| KR102547441B1 (ko) * | 2015-11-09 | 2023-06-26 | 삼성전자주식회사 | 차량 간 메시지 전송 장치 및 방법 |
| US9632507B1 (en) | 2016-01-29 | 2017-04-25 | Meritor Wabco Vehicle Control Systems | System and method for adjusting vehicle platoon distances based on predicted external perturbations |
| DE102016002603A1 (de) | 2016-03-03 | 2017-09-07 | Audi Ag | Verfahren zur Ermittlung und Bereitstellung einer auf eine vorbestimmte Umgebung bezogenen, Umfelddaten enthaltenden Datenbank |
| DE112016006745T5 (de) * | 2016-04-15 | 2018-12-27 | Honda Motor Co., Ltd. | Fahrzeugsteuersystem, Fahrzeugsteuerverfahren und Fahrzeugsteuerprogramm |
| US10150414B2 (en) * | 2016-07-08 | 2018-12-11 | Ford Global Technologies, Llc | Pedestrian detection when a vehicle is reversing |
| DE102016213038A1 (de) * | 2016-07-18 | 2018-01-18 | Zf Friedrichshafen Ag | Verfahren zur Bereitstellung von Sensorinformationen für ein Kraftfahrzeug |
| EP3273423B1 (fr) * | 2016-07-21 | 2019-03-13 | Continental Automotive GmbH | Dispositif et procédé pour un véhicule permettant de reconnaître un piéton |
| DE102016215825A1 (de) * | 2016-08-23 | 2018-03-01 | Bayerische Motoren Werke Aktiengesellschaft | Verfahren zum externen Bereitstellen von Kartendaten für Assistenzsysteme von Kraftfahrzeugen |
| US9928746B1 (en) * | 2016-09-16 | 2018-03-27 | Ford Global Technologies, Llc | Vehicle-to-vehicle cooperation to marshal traffic |
| DE102017203838B4 (de) * | 2017-03-08 | 2022-03-17 | Audi Ag | Verfahren und System zur Umfelderfassung |
| US10338594B2 (en) * | 2017-03-13 | 2019-07-02 | Nio Usa, Inc. | Navigation of autonomous vehicles to enhance safety under one or more fault conditions |
| US10423162B2 (en) | 2017-05-08 | 2019-09-24 | Nio Usa, Inc. | Autonomous vehicle logic to identify permissioned parking relative to multiple classes of restricted parking |
| US10369974B2 (en) | 2017-07-14 | 2019-08-06 | Nio Usa, Inc. | Control and coordination of driverless fuel replenishment for autonomous vehicles |
| US10710633B2 (en) | 2017-07-14 | 2020-07-14 | Nio Usa, Inc. | Control of complex parking maneuvers and autonomous fuel replenishment of driverless vehicles |
| DE102017218438A1 (de) * | 2017-10-16 | 2019-04-18 | Robert Bosch Gmbh | Verfahren und System zum Betreiben eines Fahrzeugs |
| KR102485394B1 (ko) * | 2017-12-11 | 2023-01-05 | 현대자동차주식회사 | 자동차 및 그 제어 방법 |
| US11022971B2 (en) | 2018-01-16 | 2021-06-01 | Nio Usa, Inc. | Event data recordation to identify and resolve anomalies associated with control of driverless vehicles |
| CN108284838A (zh) * | 2018-03-27 | 2018-07-17 | 杭州欧镭激光技术有限公司 | 一种用于检测车辆外部环境信息的检测系统及检测方法 |
| CN110875797B (zh) | 2018-08-31 | 2022-11-08 | 阿波罗智能技术(北京)有限公司 | 智能驾驶汽车的数据传输方法、装置及设备 |
| US11618502B2 (en) * | 2019-03-28 | 2023-04-04 | Volkswagen Aktiengesellschaft | On-road localization methodologies and equipment utilizing road surface characteristics |
| JP7479496B2 (ja) * | 2020-03-10 | 2024-05-08 | グーグル エルエルシー | ルートに沿って障害物および危険を識別するためのシステムおよび方法 |
| DE102020208637A1 (de) * | 2020-07-09 | 2022-01-13 | Robert Bosch Gesellschaft mit beschränkter Haftung | Vorhersage von dynamischen Objekten an verdeckten Bereichen |
| DE102020209515A1 (de) | 2020-07-29 | 2022-02-03 | Volkswagen Aktiengesellschaft | Verfahren sowie System zur Unterstützung einer vorausschauenden Fahrstrategie |
| US20220198200A1 (en) * | 2020-12-22 | 2022-06-23 | Continental Automotive Systems, Inc. | Road lane condition detection with lane assist for a vehicle using infrared detecting device |
| DE102021205061A1 (de) | 2021-05-19 | 2022-11-24 | Robert Bosch Gesellschaft mit beschränkter Haftung | Verfahren und Vorrichtung zum Ermitteln verdeckter Objekte in einer ein Umfeld repräsentierenden 3D-Punktwolke |
| CN114446092B (zh) * | 2022-01-19 | 2022-12-27 | 无锡学院 | 一种基于三维相机组网的s型公路模拟障碍物预警方法 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5249157A (en) | 1990-08-22 | 1993-09-28 | Kollmorgen Corporation | Collision avoidance system |
| US5983161A (en) | 1993-08-11 | 1999-11-09 | Lemelson; Jerome H. | GPS vehicle collision avoidance warning and control system and method |
| US6553130B1 (en) * | 1993-08-11 | 2003-04-22 | Jerome H. Lemelson | Motor vehicle warning and control system and method |
| US6526352B1 (en) | 2001-07-19 | 2003-02-25 | Intelligent Technologies International, Inc. | Method and arrangement for mapping a road |
| US7042345B2 (en) * | 1996-09-25 | 2006-05-09 | Christ G Ellis | Intelligent vehicle apparatus and method for using the apparatus |
| JP3857402B2 (ja) | 1997-12-05 | 2006-12-13 | 富士通株式会社 | 交差点衝突防止方法及びシステム及び交差点衝突防止プログラムを格納した記憶媒体及び交差点装置 |
| JPH11328598A (ja) | 1998-05-18 | 1999-11-30 | Toyota Motor Corp | 交差点警報システム |
| US6289332B2 (en) * | 1999-02-26 | 2001-09-11 | Freightliner Corporation | Integrated message display system for a vehicle |
| DE10301468B4 (de) * | 2002-01-18 | 2010-08-05 | Honda Giken Kogyo K.K. | Vorrichtung zur Beobachtung der Umgebung eines Fahrzeugs |
| JP4040441B2 (ja) | 2002-12-04 | 2008-01-30 | トヨタ自動車株式会社 | 車両用通信装置 |
| GB2400353A (en) * | 2003-04-09 | 2004-10-13 | Autoliv Dev | Pedestrian detecting system provided on a motor vehicle |
-
2007
- 2007-10-10 EP EP07821156.2A patent/EP2082388B1/fr not_active Not-in-force
- 2007-10-10 US US12/444,778 patent/US8179281B2/en active Active
- 2007-10-10 WO PCT/EP2007/060788 patent/WO2008043795A1/fr not_active Ceased
- 2007-10-10 DE DE102007048809A patent/DE102007048809A1/de not_active Withdrawn
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102019102679A1 (de) * | 2019-02-04 | 2020-08-06 | Bayerische Motoren Werke Aktiengesellschaft | Verfahren, Vorrichtung, Computerprogramm und Computerprogrammprodukt zum Bereitstellen eines Bahnverlaufs eines Objekts für ein Fahrzeug |
| DE102019102679B4 (de) * | 2019-02-04 | 2026-01-29 | Bayerische Motoren Werke Aktiengesellschaft | Verfahren, Vorrichtung, Computerprogramm und Computerprogrammprodukt zum Bereitstellen eines Bahnverlaufs eines Objekts für ein Fahrzeug zur Verwendung für Steuerungsfunktionen des Fahrzeugs |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2008043795A1 (fr) | 2008-04-17 |
| EP2082388A1 (fr) | 2009-07-29 |
| US8179281B2 (en) | 2012-05-15 |
| US20100045482A1 (en) | 2010-02-25 |
| DE102007048809A1 (de) | 2008-07-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2082388B1 (fr) | Procédé et dispositif pour détecter des objets cachés dans la circulation routière | |
| EP3830522B1 (fr) | Procédé pour estimer la qualité de la localisation lors de la localisation propre d'un véhicule, dispositif pour mettre en oeuvre le procédé, véhicule et programme informatique | |
| DE102008036131B4 (de) | Verfahren und Vorrichtung zur Erkennung der Verkehrssituation in einer Fahrzeugumgebung | |
| DE102015213884B4 (de) | Vorrichtung zum Bestimmen einer Gefahr in einer Fahrtumgebung und Vorrichtung zum Anzeigen einer Gefahr in einer Fahrtumgebung | |
| EP3834189B1 (fr) | Procédé et dispositif de commande servant à avertir un conducteur d'un véhicule automobile, et véhicule automobile équipé d'un dispositif de commande de ce type | |
| DE102017113176B4 (de) | Steuerungsvorrichtung eines Fahrzeugs | |
| DE102016217645B4 (de) | Verfahren zum Bereitstellen von Information über eine voraussichtliche Fahrintention eines Fahrzeugs | |
| DE112021003340T5 (de) | Hindernisinformationsverwaltungsvorrichtung,hindernisinformationsverwaltungsverfahren und vorrichtung für ein fahrzeug | |
| EP3722169B1 (fr) | Véhicule automobile et procédé d'évitement d'une collision | |
| DE102020216470A1 (de) | Fahrerassistenzsystem, damit ausgestattetes fahrzeug und verfahren zum steuern des fahrzeugs | |
| CN113320532A (zh) | 合作式变道控制方法、装置及设备 | |
| DE112006001864T5 (de) | System zur Beobachtung der Fahrzeugumgebung aus einer entfernten Perspektive | |
| DE102017114876A1 (de) | Fahrerassistenzsystem zur Kollisionsvermeidung mittels Warn- und Interventionskaskade | |
| WO2008043850A1 (fr) | Système de réduction de la course de freinage d'un véhicule | |
| DE102016223579A1 (de) | Verfahren zum Ermitteln von Daten einer Verkehrssituation | |
| DE102017221616A1 (de) | System und Verfahren für einen Einfädelassistenten unter Anwendung von Fahrzeugkommunikation | |
| WO2018054523A1 (fr) | Procédé pour avertir le conducteur d'un véhicule à moteur en prenant en considération une zone de vision courante du conducteur, dispositif de calcul et véhicule de détection | |
| EP4046403B1 (fr) | Procédé de fourniture d'un message d'objet concernant un objet détecté dans l'environnement d'un usager de la route dans un réseau de communication pour la communication avec d'autres usagers de la route | |
| WO2007131801A1 (fr) | Procédé et dispositif permettant d'empêcher une collision entre des véhicules | |
| DE102007049249A1 (de) | System zur Reduktion des Bremsweges eines Fahrzeuges | |
| DE102005029662A1 (de) | Umgebungserfassung bei Landfahrzeugen | |
| DE102017204383A1 (de) | Verfahren zur Steuerung eines Fahrzeugs | |
| DE102007008880A1 (de) | Verfahren zur Erhöhung des Straßenverkehrsflußes | |
| DE102021129597A1 (de) | Lokalisierung anhand von umgebenden fahrzeugen | |
| DE102007007283A1 (de) | Verfahren und Vorrichtung zur Bestimmung von in der Fahrzeugumgebung befindlichen Fahrzeugen |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 20090513 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IS IT LI LT LU LV MC MT NL PL PT RO SE SI SK TR |
|
| DAX | Request for extension of the european patent (deleted) | ||
| 17Q | First examination report despatched |
Effective date: 20110330 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| INTG | Intention to grant announced |
Effective date: 20150415 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IS IT LI LT LU LV MC MT NL PL PT RO SE SI SK TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 744286 Country of ref document: AT Kind code of ref document: T Effective date: 20150915 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502007014161 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20150819 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20151120 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150819 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150819 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150819 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150819 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150819 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20151221 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150819 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20151219 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150819 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150819 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150819 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150819 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150819 Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150819 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 502007014161 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150819 Ref country code: LU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20151010 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150819 |
|
| 26N | No opposition filed |
Effective date: 20160520 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20151119 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: MM4A |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20151031 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20151031 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: ST Effective date: 20160630 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150819 Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20151102 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20151010 Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20151119 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MM01 Ref document number: 744286 Country of ref document: AT Kind code of ref document: T Effective date: 20151010 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20151010 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20071010 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150819 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150819 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20151031 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150819 Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150819 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R084 Ref document number: 502007014161 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R081 Ref document number: 502007014161 Country of ref document: DE Owner name: CONTINENTAL AUTONOMOUS MOBILITY GERMANY GMBH, DE Free format text: FORMER OWNER: CONTINENTAL TEVES AG & CO. OHG, 60488 FRANKFURT, DE |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20231031 Year of fee payment: 17 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R119 Ref document number: 502007014161 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20250501 |