EP2085148B1 - Schwingungserzeuger für ein Vibrationsrammgerät - Google Patents
Schwingungserzeuger für ein Vibrationsrammgerät Download PDFInfo
- Publication number
- EP2085148B1 EP2085148B1 EP08001600.9A EP08001600A EP2085148B1 EP 2085148 B1 EP2085148 B1 EP 2085148B1 EP 08001600 A EP08001600 A EP 08001600A EP 2085148 B1 EP2085148 B1 EP 2085148B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- vibrator
- accordance
- sensors
- evaluation unit
- sensor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images

Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B06—GENERATING OR TRANSMITTING MECHANICAL VIBRATIONS IN GENERAL
- B06B—METHODS OR APPARATUS FOR GENERATING OR TRANSMITTING MECHANICAL VIBRATIONS OF INFRASONIC, SONIC, OR ULTRASONIC FREQUENCY, e.g. FOR PERFORMING MECHANICAL WORK IN GENERAL
- B06B1/00—Methods or apparatus for generating mechanical vibrations of infrasonic, sonic, or ultrasonic frequency
- B06B1/10—Methods or apparatus for generating mechanical vibrations of infrasonic, sonic, or ultrasonic frequency making use of mechanical energy
- B06B1/16—Methods or apparatus for generating mechanical vibrations of infrasonic, sonic, or ultrasonic frequency making use of mechanical energy operating with systems involving rotary unbalanced masses
- B06B1/161—Adjustable systems, i.e. where amplitude or direction of frequency of vibration can be varied
- B06B1/166—Where the phase-angle of masses mounted on counter-rotating shafts can be varied, e.g. variation of the vibration phase
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02D—FOUNDATIONS; EXCAVATIONS; EMBANKMENTS; UNDERGROUND OR UNDERWATER STRUCTURES
- E02D7/00—Methods or apparatus for placing sheet pile bulkheads, piles, mouldpipes, or other moulds
- E02D7/18—Placing by vibrating
Definitions
- the invention relates to a vibration generator for a vibratory pile driver according to the preamble of claim 1.
- the invention further relates to a vibratory pile driver according to claim 8.
- vibrators are used to bring objects such as profiles into the ground or to pull them out of the ground or to compact soil material.
- the soil is stimulated by vibration and thus reaches a "pseudo-liquid" state.
- the vibration is characterized by a linear movement and is generated by pairwise counter-rotating imbalances within a Vibratorgetriebes.
- Vibration generators are characterized by the rotating unbalance and the maximum speed.
- Such vibrators are eg in EP 0 926 300 A1 or EP 0 577 444 A1 disclosed.
- the vibration generators are regularly linear-acting vibration exciters whose centrifugal force is generated by rotating imbalances. These vibration exciters move at a variable speed.
- the size of the imbalance is also called "static moment".
- the course of the velocity of the linear vibration exciter corresponds to a periodically recurring function, for example a sine function, but it can also take other forms.
- the characteristic of the vibration generator can be influenced by the size of the static torque, the speed and the static load. These are essential operating parameters for vibration generation. Unfavorable operating characteristics cause a large power loss and a reduction in the efficiency of the vibrator.
- the amount of power loss is particularly influenced by the nature of the penetration medium, that is, the medium or the soil into which a pile is introduced.
- the coordination of the operating parameters on the particular nature of the penetration medium proves to be complicated and problematic in practice.
- the invention aims to remedy this situation.
- the invention is based on the object to provide a vibration generator, which allows a reduction in the indexed by unfavorable operating characteristics power losses and thus energy-efficient operation. According to the invention, this object is solved by the features of the characterizing part of patent claim 1.
- a vibration exciter is created, which allows a reduction in the indicated by unfavorable operating characteristics power losses and thus an energy-efficient operation.
- the provision of a storage unit for depositing ground quality or task-specific default data sets with defined operating parameters of the vibration generator makes it possible to provide empirically acquired empirical values in the manner of an expert system. Depending on the task, such a simple adjustment of the vibrator by selecting an operating characteristic data record to be selected according to the task.
- sensors for detecting the frequency, the static load and the relative position of the imbalance masses are arranged to each other.
- the sensors comprise at least one inductive sensor and / or a rotary encoder.
- Such sensors have proven to be durable and robust.
- a sensor for detecting the acceleration of the rotating shafts is arranged.
- a sensor for detecting the amplitude of the oscillations of the vibration generator can be arranged.
- the sensors are connected to an evaluation unit, which compares the measured values recorded by the sensors with stored maximum values. This allows the detection of load peaks.
- the evaluation unit preferably determines the currently applied static torque on the basis of the measured values determined by the sensors.
- a device for the automatic selection of a default data set on the basis of the determined acceleration values is provided.
- a program automation can be implemented, by means of which, depending on the task-specific operating situation, the automatic selection of the most efficient predefined variables takes place, without intervention by the operator being necessary.
- a semi-automatic can be realized in which the operator an operating characteristic data record is proposed, which can be confirmed or changed by the operator.
- the evaluation unit advantageously has a programmable logic controller (PLC). This allows flexible control of the vibration generator.
- PLC programmable logic controller
- an acoustic and / or visual warning device for alerting incorrect inputs, which is connected to the evaluation unit. In this way, the operator can be notified of a required adaptation or change of the current operating parameters.
- At least one hydraulic drive with a variable displacement is arranged.
- a higher static torque can be achieved with the same drive power due to a lower rotational speed, which at the same time causes a higher ground vibration.
- ground vibrations can be reduced by operating at higher speeds, but at the same time reducing the static torque.
- the above measures prove to be problematic, since the drive power is speed-dependent. Due to the possibility of changing the absorption volume of the hydraulic drive, the respective power curve can be adjusted accordingly when changing the speed.
- a control is provided, via which the displacement is adjustable as a function of operating pressure or speed.
- a limit operating pressure and / or a limit speed can be set.
- the invention is further based on the object to provide a vibration racking device, which allows a reduction in the indicated by unfavorable operating characteristics of the vibrator power losses and thus energy-efficient operation. According to the invention, this object is solved by the features of claim 8.
- a vibratory pile driver is provided, which enables a reduction in the indicated by unfavorable operating characteristics of the vibrator power losses and thus energy-efficient operation.
- a sensor for detecting the forces acting on the pile material forces is arranged. By determining this size, a characterization of the soil condition is possible. This characterization can be improved by the preferred arrangement of at least one sensor which can be applied to the penetration medium for detecting the vibrations of the penetration medium, which is connected to the evaluation unit. Preferably, a sensor for detecting the penetration rate of the pile is provided.
- a device for the automatic selection of a default data set on the basis of the determined forces acting on the pile material and / or the determined Rammgut Irish and acceleration and / or the detected vibrations of the penetration medium is provided.
- a program automation can be implemented, by means of which, depending on the task-specific operating situation, the automatic selection of the most efficient predefined variables takes place, without intervention by the operator being necessary.
- a semi-automatic can be realized in which the operator an operating characteristics record is proposed, which can be confirmed or changed by the operator.
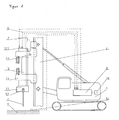
- the vibration ramming device chosen as an exemplary embodiment consists essentially of a carrier device 1, on which a vibrator (vibrator) 3 is arranged so as to be vertically displaceable via a broker 2.
- the vibrator 3 comprises a housing 31, which is surrounded by a hood 30.
- a clamping tongs 37 for receiving pile material 4 is arranged on the hood 30.
- the hood 30 serves to guide the vibrator 3 and transmits the static force of the leader 2 to the vibrator 3.
- the vibrator 3 generates via rotating imbalances 3311, 3321, 3331, 3511, 3521, 3531, a vibration which via the clamping forceps 33 on the Rammgut 4 is transmitted.
- the vibrator 3 is designed as a vibrator gearbox ( FIG. 2 ). It consists essentially of a housing 31, in which with gears 331, 332, 333, 351, 352, 353 provided shafts 33, 35 are rotatably mounted.
- the gears 331, 332, 333, 351, 352, 353 are each provided with imbalance masses 3311, 3321, 3331, 3511, 3521, 3531, wherein the gears of both shafts 33, 35 via gears 3613, 3614 of the rotor shaft 361 of a pivot motor 36 with each other are engaged.
- the gears 331, 3321, 3331, 3511, 3521, 3531 provided with unbalanced masses 331, 332, 333, 351, 352, 353 are adjustable relative to each other via the pivot motor 36 in its rotational position, whereby the resulting imbalance or the resulting static moment is adjustable.
- Such Vibratorgetriebe with rotatably mounted imbalance masses that are adjustable in relative phase position the skilled person for example from the DE 20 2007 005 283 U1 known.
- the vibrator 3 is opposite to the gears 331, 332, 333, 351, 352, 353 provided on the inside of the housing 31 each with two parallel to the circumference of the gears spaced from each other arranged inductive sensors 310.
- the inductive sensors 310 enable the detection of the angular acceleration of the rotating imbalance masses 3311, 3321, 3331, 3511, 3521, 3531.
- the time offset of the imbalance masses 3311, 3321, 3331, 3511, 3521, 3531 can furthermore be used to determine their relative position to one another.
- an acceleration sensor 311 is arranged on the housing 31 of the vibration generator 3.
- the evaluation unit is a programmable logic controller Control (PLC) 7 is arranged, which further calculated on the basis of frequency and time offset of the imbalance masses to each other the applied static moment.
- PLC programmable logic controller Control
- the shafts 33, 35 of the vibrator 3 are connected to hydraulic drives 38.
- the hydraulic drives 38 have a variable displacement.
- the PLC 7 is preceded by a memory unit 10, which is connected via lines 6 to the PLC 7.
- soil constitution specific default data sets are stored with defined operating characteristics. These default values are empirically determined quantities.
- the PLC 7 together with the memory unit 10 forms a program automatic, which selects a corresponding efficient data record depending on the existing soil condition.
- the data sets are coupled to force and acceleration values to be determined, which are transmitted as input variables of the PLC 7.
- the vibration emission of the surrounding penetrating medium is deposited as the influencing variable.
- the force and acceleration values are determined via a force sensor 52 and an acceleration sensor 311.
- the force sensor 52 is set up such that it exerts the forces acting on the pile 4, the forces applied by the leader 2 and the counterforce generated by the penetration medium results, determined and transmitted via lines 6 to the PLC 7.
- the acceleration sensor 311 is set up in such a way that it determines the penetration speed and acceleration of the pile material 4 into the penetration medium 9 and also transmits them via lines 6 to the SPS 7.
- the penetration rate can be determined with an additional sensor (53), preferably a laser for distance measurement between vibrator and soil.
- the determination of the applied force can also take place via an acceleration sensor 311 and the dynamic mass.
- a vibration sensor 54 is applied to the floor 9 at a distance from the location of penetration of the pile material 4. This vibration sensor 54 detects the vibrations emitted by the ground during the pile-driving operation from the ground 9 and transmits the detected vibration values to the PLC 7 via a line 6.
- a default data set assigned to these values is selected from a memory unit 10 whose default values are to be compared with the values set by the sensors 310 , 311 determined operating parameters are used.
- the selection of a data record by the operator of the vibratory pile driver via a corresponding control panel is possible.
- a controller 8 is arranged, which is connected via lines 6 to the memory unit 10 and to the PLC 7.
- the controller 8 is set up in such a way that it calculates the optimum operating parameters of the vibration generator from the static torque determined by the SPS 7 and the acceleration data determined by the sensors 311 against the background of the default characteristic values of the default data set selected from the memory unit 10.
- the controller 8 is connected to the arranged in the vibrator 3 pivot motor 36 for changing the relative rotational position of the imbalance masses to each other.
- the current operating characteristics recorded by the sensors 310, 311 are adapted to the corresponding preset values of the selected default data set.
- an adjustment of the resulting imbalance or the resulting static torque In case of exceeding the permissible acceleration values via the pivot motor 36 via the gear 3621 an adjustment of the resulting imbalance or the resulting static torque.
- an optical and / or acoustic signal in the operator's stand of the carrier device is possible to inform the operator of the significant exceeding of allowable acceleration values.
- this indicates the selection of an unsuitable operating characteristic quantity set from the memory unit 10. Enabling the signal instructs the operator to review and, if necessary, correct the selection of the default data set.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Life Sciences & Earth Sciences (AREA)
- General Life Sciences & Earth Sciences (AREA)
- Mining & Mineral Resources (AREA)
- Paleontology (AREA)
- Civil Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Structural Engineering (AREA)
- Placing Or Removing Of Piles Or Sheet Piles, Or Accessories Thereof (AREA)
Description
- Die Erfindung betrifft einen Schwingungserzeuger für ein Vibrationsrammgerät nach dem Oberbegriff des Patentanspruchs 1. Die Erfindung betrifft weiterhin ein Vibrationsrammgerät nach dem Patentanspruch 8.
- Im Bauwesen werden Schwingungserzeuger verwendet, um Objekte, wie beispielsweise Profile, in den Boden einzubringen oder aus dem Boden zu ziehen oder auch um Bodenmaterial zu verdichten. Der Boden wird durch Vibration angeregt und erreicht so einen "pseudoflüssigen" Zustand. Durch statische Auflast kann das Rammgut dann in den Baugrund gedrückt werden. Die Vibration ist gekennzeichnet durch eine lineare Bewegung und wird durch paarweise gegenläufig rotierende Unwuchten innerhalb eines Vibratorgetriebes generiert. Schwingungserzeuger werden charakterisiert durch die rotierende Unwucht und die maximale Drehzahl.
- Solche Schwingungserzeuger sind z.B. in
EP 0 926 300 A1 oderEP 0 577 444 A1 offenbart. - Die Schwingungserzeuger sind regelmäßig linear wirkende Schwingungserreger, deren Fliehkraft durch rotierende Unwuchten generiert wird. Diese Schwingungserreger bewegen sich mit veränderlicher Geschwindigkeit. Die Größe der Unwucht wird auch als "statisches Moment" bezeichnet. Der Verlauf der Geschwindigkeit des linearen Schwingungserregers entspricht einer periodisch wiederkehrenden Funktion, beispielsweise einer Sinusfunktion, sie kann aber auch andere Formen einnehmen. Die Charakteristik des Schwingungserzeugers ist über die Größe des statischen Momentes, der Drehzahl sowie der statischen Auflast beeinflussbar. Dieses sind wesentliche Betriebskenngrößen für die Schwingungserzeugung. Ungünstige Betriebskenngrößen verursachen eine große Verlustleistung und eine Verminderung der Effizienz des Schwingungserzeugers. Dabei wird die Höhe der Verlustleistung insbesondere auch durch die Beschaffenheit des Eindringmediums, das ist das Medium bzw. der Boden, in den ein Rammgut eingebracht wird, beeinflusst. Die Abstimmung der Betriebsparameter auf die jeweilige Beschaffenheit des Eindringmediums erweist sich in der Praxis als aufwendig und problematisch.
- Hier will die Erfindung Abhilfe schaffen. Der Erfindung liegt die Aufgabe zu Grunde, einen Schwingungserzeuger zu schaffen, der eine Reduzierung der durch ungünstige Betriebskenngrößen indizierten Verlustleistungen und damit einen energieeffizienten Betrieb ermöglicht. Gemäß der Erfindung wird diese Aufgabe durch die Merkmale des kennzeichnenden Teils des Patentanspruchs 1 gelöst.
- Mit der Erfindung ist ein Schwingungserreger geschaffen, der eine Reduzierung der durch ungünstige Betriebskenngrößen indizierten Verlustleistungen und damit einen energieeffizienten Betrieb ermöglicht. Durch das Vorsehen einer Speichereinheit zur Hinterlegung von bodenbeschaffenheits- oder aufgabenspezifischen Vorgabedatensätzen mit definierten Betriebskenngrößen des Schwingungserzeugers ist die Bereitstellung von in der Praxis erworbenen Erfahrungswerten in der Art eines Expertensystems ermöglicht. In Abhängigkeit von der Aufgabenstellung kann so eine einfache Einstellung des Schwingungserzeugers durch Auswahl eines je nach Aufgabe zu wählenden Betriebskenngrößendatensatzes erfolgen.
- In Weiterbildung der Erfindung sind Sensoren zur Erfassung der Frequenz, der statischen Auflast sowie der relativen Position der Unwuchtmassen zueinander angeordnet.
- Bevorzugt umfassen die Sensoren wenigstens einen induktiven Sensor und/ oder einen Drehgeber. Derartige Sensoren haben sich als langlebig und robust erwiesen. Vorteilhaft ist ein Sensor zur Erfassung der Beschleunigung der rotierenden Wellen angeordnet. Ergänzend kann ein Sensor zur Erfassung der Amplitude der Schwingungen des Schwingungserzeugers angeordnet sein.
- In Weiterbildung der Erfindung sind die Sensoren mit einer Auswerteeinheit verbunden, welche die von den Sensoren erfassten Messwerte mit hinterlegten Maximalwerten vergleicht. Hierdurch ist die Detektierung von Belastungsspitzen ermöglicht. Bevorzugt ermittelt die Auswerteeinheit auf Basis der von den Sensoren ermittelten Messwerte das jeweils anliegende statische Moment.
- In Ausgestaltung der Erfindung ist eine Vorrichtung zur automatischen Auswahl eines Vorgabe-Datensatzes auf Grundlage der ermittelten Beschleunigungswerte vorgesehen. Hierdurch ist eine Programmautomatik realisierbar, durch die in Abhängigkeit von der aufgabenspezifischen Betriebssituation die automatische Auswahl der effizientesten Vorgabegrößen erfolgt, ohne dass ein Eingriff des Bedieners erforderlich ist. Alternativ kann auch eine Halbautomatik realisiert werden, bei der dem Bediener ein Betriebskenngrößendatensatz vorgeschlagen wird, welcher durch den Bediener bestätigt oder verändert werden kann.
- Vorteilhaft weist die Auswerteeinheit eine speicherprogrammierbare Steuerung (SPS) auf. Hierdurch ist eine flexible Steuerung des Schwingungserzeugers ermöglicht.
- In Weiterbildung der Erfindung ist eine akustische und/oder optische Warneinrichtung zur Alarmierung von Fehleingaben vorgesehen, die mit der Auswerteeinheit verbunden ist. Hierdurch kann der Bediener auf eine erforderliche Anpassung bzw. Änderung der aktuellen Betriebskenngrößen hingewiesen werden.
- In Ausgestaltung der Erfindung ist wenigstens ein hydraulischer Antrieb mit veränderbarem Schluckvolumen angeordnet. Bei hydraulischen Antrieben gilt, dass bei gleicher Antriebsleistung durch eine niedrigere Drehzahl ein höheres statisches Moment erzielbar ist, wodurch gleichzeitig eine höhere Bodenschwingung bewirkt ist. Im Innenstadtbereich können durch einen Betrieb mit höherer Drehzahl Bodenschwingungen reduziert werden, wodurch jedoch gleichzeitig das statische Moment verringert wird. Bei hydraulischen Antrieben mit konstantem Schluckvolumen erweisen sich die vorgenannten Maßnahmen als problematisch, da die Antriebsleistung drehzahlabhängig ist. Durch die Möglichkeit der Veränderung des Schluckvolumens des hydraulischen Antriebs kann die jeweilige Leistungskurve bei Veränderung der Drehzahl entsprechend angepasst werden.
- Bevorzugt ist eine Regelung vorgesehen, über die das Schluckvolumen in Abhängigkeit von Betriebsdruck oder Drehzahl einstellbar ist. Vorteilhaft ist ein Grenzbetriebsdruck und/oder eine Grenzdrehzahl einstellbar.
- Der Erfindung liegt weiterhin die Aufgabe zu Grunde, ein Vibrationsrammgerät zu schaffen, das eine Reduzierung der durch ungünstige Betriebskenngrößen des Schwingungserzeugers indizierten Verlustleistungen und damit einen energieeffizienten Betrieb ermöglicht. Gemäß der Erfindung wird diese Aufgabe durch die Merkmale des Patentanspruchs 8 gelöst.
- Mit der Erfindung ist ein Vibrationsrammgerät geschaffen, welches eine Reduzierung der durch ungünstige Betriebskenngrößen des Schwingungserzeugers indizierten Verlustleistungen und damit einen energieeffizienten Betrieb ermöglicht.
- In Ausgestaltung der Erfindung ist ein Sensor zur Erfassung der auf das Rammgut einwirkenden Kräfte angeordnet. Durch die Ermittlung dieser Größe ist eine Charakterisierung der Bodenbeschaffenheit ermöglicht. Diese Charakterisierung kann durch die bevorzugte Anordnung wenigstens eines auf das Eindringmedium aufbringbaren Sensors zur Erfassung der Schwingungen des Eindringmediums, der mit der Auswerteeinheit verbunden ist, verbessert werden. Bevorzugt ist ein Sensor zur Erfassung der Eindringgeschwindigkeit des Rammguts vorgesehen.
- In bevorzugter Weiterbildung der Erfindung ist eine Vorrichtung zur automatischen Auswahl eines Vorgabe-Datensatzes auf Grundlage der ermittelten auf das Rammgut einwirkenden Kräfte und/oder der ermittelten Rammgutgeschwindigkeit und -beschleunigung und/oder der erfassten Schwingungen des Eindringmediums vorgesehen. Hierdurch ist eine Programmautomatik realisierbar, durch die in Abhängigkeit von der aufgabenspezifischen Betriebssituation die automatische Auswahl der effizientesten Vorgabegrößen erfolgt, ohne dass ein Eingriff des Bedieners erforderlich ist. Alternativ ist auch eine Halbautomatik realisierbar, bei der dem Bediener ein Betriebskenndatensatz vorgeschlagen wird, welcher durch den Bediener bestätigt oder verändert werden kann.
- Andere Weiterbildungen und Ausgestaltungen der Erfindung sind in den übrigen Unteransprüchen angegeben. Ein Ausführungsbeispiel der Erfindung ist in den Zeichnungen dargestellt und wird nachfolgend im Einzelnen beschrieben. Es zeigen:
- Fig. 1:
- Die schematische Darstellung eines Vibrationsrammgerätes mit Trägergerät und
- Fig. 2:
- die schematische Darstellung eines Vibratorgetriebes im Längsschnitt.
- Das als Ausführungsbeispiel gewählte Vibrationsrammgerät besteht im Wesentlichen aus einem Trägergerät 1, an dem über einen Mäkler 2 ein Schwingungserzeuger (Vibrator) 3 vertikal verschiebbar angeordnet ist. Der Schwingungserzeuger 3 umfasst ein Gehäuse 31, welches von einer Haube 30 umgeben ist. An der Haube 30 ist eine Klemmzange 37 zur Aufnahme von Rammgut 4 angeordnet. Die Haube 30 dient der Führung des Schwingungserzeugers 3 und überträgt die statische Kraft des Mäklers 2 auf den Schwingungserzeuger 3. Der Schwingungserzeuger 3 generiert über rotierende Unwuchten 3311, 3321, 3331, 3511, 3521, 3531 eine Vibration, welche über die Klemmzange 33 auf das Rammgut 4 übertragen wird.
- Der Schwingungserzeuger 3 ist als Vibratorgetriebe ausgeführt (
Figur 2 ). Es besteht im Wesentlichen aus einem Gehäuse 31, in dem mit Zahnrädern 331, 332, 333, 351, 352, 353 versehene Wellen 33, 35 drehbar gelagert sind. Die Zahnräder 331, 332, 333, 351, 352, 353 sind jeweils mit Unwuchtmassen 3311, 3321, 3331, 3511, 3521, 3531 versehen, wobei die Zahnräder beider Wellen 33, 35 über Zahnräder 3613, 3614 der Rotorwelle 361 eines Schwenkmotors 36 miteinander im Eingriff sind. Die mit Unwuchtmassen 3311, 3321, 3331, 3511, 3521, 3531 versehenen Zahnräder 331, 332, 333, 351, 352, 353 sind über den Schwenkmotor 36 in ihrer rotatorischen Position relativ zueinander verstellbar, wodurch die resultierende Unwucht bzw. das resultierende statische Moment einstellbar ist. Derartige Vibratorgetriebe mit drehbar gelagerten Unwuchtmassen, die in der relativen Phasenlage verstellbar sind, sind dem Fachmann beispielsweise aus derDE 20 2007 005 283 U1 bekannt. - Der Schwingungserzeuger 3 ist gegenüberliegend den Zahnrädern 331, 332, 333, 351, 352, 353 auf der Innenseite des Gehäuses 31 jeweils mit zwei parallel zum Umfang der Zahnräder beabstandet zueinander angeordneten induktiven Sensoren 310 versehen. Die induktiven Sensoren 310 ermöglichen die Erfassung der Winkelbeschleunigung der rotierenden Unwuchtmassen 3311, 3321, 3331, 3511, 3521, 3531. Über den Zeitversatz der Unwuchtmassen 3311, 3321, 3331, 3511, 3521, 3531 lässt sich weiterhin deren relative Position zueinander ermitteln. Des Weiteren ist an dem Gehäuse 31 des Schwingungserzeugers 3 ein Beschleunigungssensor 311 angeordnet. Zur Verarbeitung der Signale der Sensoren 310, 311 und Ermittlung der vorgenannten Größen ist als Auswerteeinheit eine speicherprogrammierbare Steuerung (SPS) 7 angeordnet, welche weiterhin auf Basis von Frequenz und Zeitversatz der Unwuchtmassen zueinander das jeweils anliegende statische Moment berechnet. Alternativ kann auch eine Sensorik mit zwei induktiven Sensoren (also einem induktiven Sensor pro Unwuchtgang) sowie einem auf dem Gehäuse des Schwingungserzeugers angebrachter Beschleunigungssensor vorgesehen sein.
- Die Wellen 33, 35 des Schwingungserzeugers 3 sind mit hydraulischen Antrieben 38 verbunden. Im Ausführungsbeispiel weisen die hydraulischen Antriebe 38 ein veränderbares Schluckvolumen auf.
- Der SPS 7 vorgeschaltet ist eine Speichereinheit 10, welche über Leitungen 6 mit der SPS 7 verbunden ist. In der Speichereinheit 10 sind bodenbeschaffenheitsspezifische Vorgabedatensätze mit definierten Betriebskenngrößen hinterlegt. Bei diesen Vorgabegrößen handelt es sich um empirisch ermittelte Größen. Im Ausführungsbeispiel bildet die SPS 7 zusammen mit der Speichereinheit 10 eine Programmautomatik, welche je nach vorliegender Bodenbeschaffenheit einen entsprechenden effizienten Datensatz auswählt. Im Ausführungsbeispiel sind die Datensätze an zu ermittelnde Kraft- und Beschleunigungswerte gekoppelt, welche als Eingangsgrößen der SPS 7 übermittelt werden. Zusätzlich ist als Einflussgröße die Schwingungsemission des umgebenden Eindringmediums hinterlegt.
- Die Ermittlung der Kraft- und Beschleunigungswerte erfolgt über einen Kraftsensor 52 sowie einen Beschleunigungssensor 311. Der Kraftsensor 52 ist derart eingerichtet, dass er die auf das Rammgut 4 einwirkenden Kräfte, die aus der durch den Mäkler 2 aufgebrachten Kräfte sowie der durch das Eindringmedium erzeugten Gegenkraft resultiert, ermittelt und über Leitungen 6 an die SPS 7 übermittelt. Der Beschleunigungssensor 311 ist derart eingerichtet, dass er die Eindringgeschwindigkeit und -beschleunigung des Rammgutes 4 in das Eindringmedium 9 ermittelt und ebenfalls über Leitungen 6 an die SPS 7 übermittelt. Wahlweise kann die Eindringgeschwindigkeit mit einem zusätzlichen Sensor (53) ermittelt werden, vorzugsweise einem Laser zur Abstandsmessung zwischen Vibrator und Boden. Alternativ kann die Ermittlung der anliegenden Kraft auch über einen Beschleunigungssensor 311 und die dynamische Masse erfolgen.
- Zur Ermittlung der Schwingungsemission des das Rammgut 4 umgebenden Bodens 9 ist beabstandet zum Eindringort des Rammgutes 4 ein Schwingungssensor 54 auf den Boden 9 aufgebracht. Dieser Schwingungssensor 54 ermittelt die vom Boden während des Rammvorgangs vom Boden 9 emittierten Schwingungen und übermittelt die erfassten Schwingungswerte über eine Leitung 6 an die SPS 7.
- Auf Basis der so ermittelten Kraft- und Beschleunigungswerte sowie der gemessenen Schwingungswerte wird aus einer Speichereinheit 10 der diesen Werten (bzw. einem Wertebereich, in den die ermittelten Werte fallen) zugeordnete Vorgabe-Datensatz ausgewählt, dessen Vorgabewerte zum Abgleich mit den durch die Sensoren 310, 311 ermittelten Betriebskenngrößen herangezogen werden. In einer alternativen Ausgestaltung ist auch die Auswahl eines Datensatzes durch den Bediener des Vibrationsrammgerätes über ein entsprechendes Bedienfeld möglich.
- In dem Trägergerät 1 ist eine Steuerung 8 angeordnet, welche über Leitungen 6 mit der der Speichereinheit 10 sowie mit der SPS 7 verbunden ist. Die Steuerung 8 ist derart eingerichtet, dass sie aus dem von der SPS 7 ermittelten statischen Moment sowie den von den Sensoren 311 ermittelten Beschleunigungsdaten vor dem Hintergrund der Vorgabekennwerte des aus der Speichereinheit 10 ausgewählten Vorgabe-Datensatzes die optimalen Betriebskenngrößen des Schwingungserzeugers errechnet.
- Die Steuerung 8 ist mit dem in dem Schwingungserzeuger 3 angeordneten Schwenkmotor 36 zur Veränderung der relativen Drehposition der Unwuchtmassen zueinander verbunden. Über die Ansteuerung des Schwenkmotors 36 erfolgt eine Angleichung der aktuellen durch die Sensoren 310, 311 erfassten Betriebskenndaten an die entsprechenden Vorgabewerte des ausgewählten Vorgabedatensatzes. Im Falle der Überschreitung der zulässigen Beschleunigungswerte erfolgt über den Schwenkmotor 36 über das Zahnrad 3621 eine Nachstellung der resultierenden Unwucht bzw. des resultierenden statischen Moments.
- Zusätzlich ist die Installation eines optischen und / oder akustischen Signals im Bedienerstand des Trägergerätes möglich, um den Bediener von der wesentlichen Überschreitung zulässiger Beschleunigungswerte zu informieren. Im Regelfall weist dies auf die Auswahl eines ungeeigneten Betriebskenngrößensatzes aus der Speichereinheit 10 hin. Durch die Aktivierung des Signals wird der Bediener angewiesen, die Auswahl des Vorgabedatensatzes zu überprüfen und gegebenenfalls zu korrigieren.
Claims (12)
- Schwingungserzeuger für ein Vibrationsrammgerät, umfassend rotierbare Unwuchtmassen, die auf Wellen angeordnet sind, wobei Mittel zur Verstellung der relativen Drehposition der Unwuchtmassen zueinander angeordnet sind, dadurch gekennzeichnet, dass ein Steuer- und Regelkreis vorgesehen ist, der folgende Komponenten aufweist:- eine Speichereinheit zur Hinterlegung von Bodenbeschaffenheits- oder Aufgabenspezifischen Vorgabe- Datensätzen mit definierten Betriebskenngrößen, aus der ein jeweils erforderlicher Datensatz auswählbar ist,- Sensoren (5) zur kontinuierlichen Erfassung der definierten Betriebskenngrößen, umfassend einen Sensor zur Erfassung der Beschleunigung der rotierenden Wellen innerhalb des Schwingungserzeugers (3) und/oder einen Sensor (51) zur Erfassung der Beschleunigung des Schwingungserzeugers,- eine Auswerteeinheit (7) zum Vergleich der ermittelten Betriebskenngrößen mit den Betriebskenngrößen des ausgewählten Vorgabe-Datensatzes,- eine mit der Auswerteeinheit (7) gekoppelte Regelvorrichtung zur Regelung des Schwingungserzeugers auf Basis der von der Auswerteeinheit (7) ermittelten Abweichungen der über die Sensoren (5) ermittelten Betriebskenngrößen von den Betriebskenngrößen des ausgewählten Vorgabe-Datensatzes,- eine mit der Regelvorrichtung gekoppelte Steuervorrichtung zur Ansteuerung der Mittel zur Verstellung der relativen Drehposition der Unwuchtmassen zueinander, und- wobei eine Vorrichtung zur automatischen Auswahl eines Vorgabe-Datensatzes auf der Grundlage der von den Sensoren (5) ermittelten Beschleunigungswerte des Schwingungserzeugers vorgesehen ist.
- Schwingungserzeuger nach Anspruch 1, dadurch gekennzeichnet, dass Sensoren (5) zur Erfassung der Frequenz sowie der relativen Position der Unwuchtmassen zueinander angeordnet sind.
- Schwingungserzeuger nach Anspruch 1 oder 2, dadurch gekennzeichnet, dass die Sensoren (5) induktive Sensoren und/oder Drehgeber umfassen.
- Schwingungserzeuger nach einem der vorgenannten Ansprüche, dadurch gekennzeichnet, dass die Auswerteeinheit (7) auf Basis der von den Sensoren (5, 51) erfassten Messwerten das jeweils anliegende statische Moment ermittelt.
- Schwingungserzeuger nach einem der vorgenannten Ansprüche, dadurch gekennzeichnet, dass die Auswerteeinheit (7) eine speicherprogrammierbare Steuerung (SPS) aufweist.
- Schwingungserzeuger nach einem der vorgenannten Ansprüche, dadurch gekennzeichnet, dass eine akustische und/oder optische Warneinrichtung zur Alarmierung von Fehleingaben vorgesehen ist, die mit der Auswerteeinheit (7) verbunden ist.
- Schwingungserzeuger nach einem der vorgenannten Ansprüche, dadurch gekennzeichnet, dass wenigstens ein hydraulischer Antrieb mit veränderbarem Schluckvolumen angeordnet ist.
- Vibrationsrammgerät, umfassend einen Schwingungserzeuger (3) nach einem der Ansprüche 1 bis 7, einen Mäkler (2), über den der Schwingungserzeuger (3) verfahrbar angeordnet ist und/oder eine Aufnahme für ein Rammgut (4).
- Vibrationsrammgerät nach Anspruch 8, dadurch gekennzeichnet, dass ein Sensor (52) zur Erfassung der auf das Rammgut (4) einwirkenden Kraft angeordnet ist.
- Vibrationsrammgerät nach Anspruch 8 oder 9, dadurch gekennzeichnet, dass ein Sensor (53) zur Erfassung der Eindringgeschwindigkeit ist.
- Vibrationsrammgerät nach einem der Ansprüche 8 bis 10, dadurch gekennzeichnet, das wenigstens ein externer, auf das Eindringmedium aufbringbarer Sensor (54) zur Erfassung der Schwingungen des Eindringmediums vorgesehen ist, der mit der Auswerteeinheit (7) verbunden ist.
- Vibrationsrammgerät nach einem der Ansprüche 9 bis 11, dadurch gekennzeichnet, dass eine Vorrichtung zur automatischen Auswahl eines Vorgabe-Datensatzes auf Grundlage der ermittelten auf das Rammgut (4) einwirkenden Kraft und/oder der ermittelten Rammgutgeschwindigkeit und/oder -beschleunigung und/oder der erfassten Schwingungen des Eindringmediums vorgesehen ist.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP08001600.9A EP2085148B1 (de) | 2008-01-29 | 2008-01-29 | Schwingungserzeuger für ein Vibrationsrammgerät |
| US12/317,118 US7870910B2 (en) | 2008-01-29 | 2008-12-19 | Vibration generator for a vibration pile driver |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP08001600.9A EP2085148B1 (de) | 2008-01-29 | 2008-01-29 | Schwingungserzeuger für ein Vibrationsrammgerät |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP2085148A1 EP2085148A1 (de) | 2009-08-05 |
| EP2085148B1 true EP2085148B1 (de) | 2013-09-18 |
Family
ID=39414990
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP08001600.9A Active EP2085148B1 (de) | 2008-01-29 | 2008-01-29 | Schwingungserzeuger für ein Vibrationsrammgerät |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US7870910B2 (de) |
| EP (1) | EP2085148B1 (de) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2085149B2 (de) * | 2008-01-29 | 2021-12-22 | ABI Anlagentechnik-Baumaschinen-Industriebedarf Maschinenfabrik und Vertriebsgesellschaft mbH | Schwingungserzeuger für ein Vibrationsrammgerät |
| EP2266713B1 (de) * | 2009-06-26 | 2011-11-02 | ABI Anlagentechnik-Baumaschinen-Industriebedarf Maschinenfabrik und Vertriebsgesellschaft mbH | Schwingungserreger |
| CN102134962B (zh) * | 2010-01-26 | 2013-12-04 | 如皋市名门电气材料有限公司 | 一种自动冲孔桩机 |
| NL2005672C2 (nl) * | 2010-11-11 | 2012-05-14 | Hillcon Piling Equipment B V | Werkwijze en inrichting voor het brengen van een funderingselement in een ondergrond. |
| US9394664B2 (en) * | 2013-03-12 | 2016-07-19 | Brooke Erin Desantis | Hydraulic breaker hammer casing assembly for pile driving |
| DE102015008015A1 (de) | 2015-06-22 | 2016-12-22 | Liebherr-Werk Nenzing Gmbh | Verfahren zum Steuern einer Vibrationsramme |
| CN105133611B (zh) * | 2015-07-11 | 2017-03-01 | 渤海大学 | 基于plc的落锤式自动打桩机控制系统 |
| DE102017001877A1 (de) * | 2017-02-27 | 2018-08-30 | Liebherr-Werk Nenzing Gmbh | Verfahren zum Erkennen von Hindernissen beim Betrieb einer Vibrationsramme |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3783954A (en) * | 1972-01-24 | 1974-01-08 | A Bodine | Sonic resonant driving of a column member utilizing compliant resonator element |
| US4143719A (en) * | 1976-02-27 | 1979-03-13 | Kabushiki Kaisha Komatsu Seisakusho | Multi-vibro pile hammer |
| JP2729969B2 (ja) * | 1990-03-29 | 1998-03-18 | 株式会社高橋エンジニアリング | 杭打ち装置 |
| FR2692523B1 (fr) | 1992-06-19 | 1994-10-07 | Procedes Tech Construction | Dispositif pour la commande d'un vibrateur à moment variable. |
| US5540295A (en) * | 1995-03-27 | 1996-07-30 | Serrette; Billy J. | Vibrator for drill stems |
| US5725329A (en) * | 1996-05-08 | 1998-03-10 | Chelminski; Stephen | Method, system and apparatus for driving and pulling pilings |
| FR2772805B1 (fr) * | 1997-12-24 | 2000-02-25 | Procedes Tech Const | Dispositif pour la commande asservie de l'amplitude des vibrations d'un vibrateur a moment variable |
| DE19805448C2 (de) | 1998-02-11 | 2000-04-13 | Voith Sulzer Papiertech Patent | Verfahren und Vorrichtung zur Reinigung und Zuführung einer Papierstoffsuspension in den Stoffauflauf einer Papiermaschine |
| US5988297A (en) * | 1998-03-24 | 1999-11-23 | Hydraulic Power Systems, Inc. | Variable eccentric vibratory hammer |
| NL1008965C2 (nl) * | 1998-04-22 | 1999-10-25 | Int Construction Equipment B V | Werkwijze en inrichting voor het trillend aandrijven van een voorwerp. |
| DE202007005283U1 (de) | 2007-03-07 | 2007-07-12 | Abi Gmbh | Schwingungserreger |
| EP2085149B2 (de) * | 2008-01-29 | 2021-12-22 | ABI Anlagentechnik-Baumaschinen-Industriebedarf Maschinenfabrik und Vertriebsgesellschaft mbH | Schwingungserzeuger für ein Vibrationsrammgerät |
-
2008
- 2008-01-29 EP EP08001600.9A patent/EP2085148B1/de active Active
- 2008-12-19 US US12/317,118 patent/US7870910B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US20090188687A1 (en) | 2009-07-30 |
| EP2085148A1 (de) | 2009-08-05 |
| US7870910B2 (en) | 2011-01-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2085149B1 (de) | Schwingungserzeuger für ein Vibrationsrammgerät | |
| EP2085148B1 (de) | Schwingungserzeuger für ein Vibrationsrammgerät | |
| EP2928611B1 (de) | Verfahren zur antriebsregelung sowie nach dem verfahren arbeitendes antriebssystem | |
| EP3491192B1 (de) | Bodenverdichtungswalze mit sensoreinrichtung an der walzbandage und verfahren zur ermittlung der bodensteifigkeit | |
| EP2627826B1 (de) | Verfahren zur ermittlung der steifigkeit und/oder dämpfung eines bereichs einer körperlichkeit | |
| DE112010000670B4 (de) | System und Verfahren zum Steuern einer Oberflächenverdichtung einer Walzmaschine mit Vibrationsverdichtungswalze | |
| EP3252232B2 (de) | Bodenverdichter und verfahren zum betreiben eines bodenverdichters | |
| DE102010060843B4 (de) | Verfahren und Vorrichtung zum Messen von Bodenparametern mittels Verdichtungsmaschinen | |
| DE102007018353A1 (de) | Schwingungserreger für Bodenverdichtungsvorrichtungen | |
| EP3517687A1 (de) | Verfahren zur verdichtungserfassung und -steuerung beim verdichten eines bodens mittels tiefenrüttler | |
| WO2017045918A1 (de) | Verfahren zum betrieb einer rohrmühle, anordnung zur ermittlung von charakteristischen daten einer rohrmühle sowie rohrmühle | |
| EP3992364A1 (de) | Verfahren zum verdichten von asphaltmaterial | |
| DE2503340B2 (de) | Verfahren und Vorrichtung zur Antriebssteuerung von Bohrköpfen, insbesondere für Großlochbohrmaschinen | |
| DE10019806A1 (de) | Bodenverdichtungsvorrichtung mit Schwingungsdetektion | |
| EP2067533B2 (de) | Schwingungserzeuger für ein Vibrationsrammgerät | |
| EP3369864B1 (de) | Verfahren zum erkennen von hindernissen beim betrieb einer vibrationsramme | |
| EP2699355A2 (de) | Zentrifuge und verfahren zur überwachung eines drehmoments | |
| EP3383543B1 (de) | Verfahren zur einstellung eines brechspalts | |
| EP3589459B1 (de) | Knickarmroboter und verfahren zum spanenden bearbeiten eines werkstückes mittels dem knickarmroboter | |
| DE10220057B4 (de) | Vorrichtung zur Kompensation von durch Massenkräfte verursachten Schwingungen | |
| EP2628391B1 (de) | Verfahren zum Füllen von Würsten mit pastöser Masse sowie Füllmaschine zum Durchführen dieses Verfahrens | |
| EP1722036A2 (de) | Bodenverdichtungsgerät | |
| DE202007019293U1 (de) | Schwingungserreger für Bodenverdichtungsvorrichtungen | |
| DE19631992B4 (de) | Vibrationsbär mit Steuervorrichtung | |
| DE102018001505A1 (de) | Verfahren zum spanenden Bearbeiten eines Werkstückes mittels einem Knickarmroboter |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 20081104 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MT NL NO PL PT RO SE SI SK TR |
|
| AX | Request for extension of the european patent |
Extension state: AL BA MK RS |
|
| AKX | Designation fees paid |
Designated state(s): AT DE FR GB NL |
|
| 17Q | First examination report despatched |
Effective date: 20101022 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| INTG | Intention to grant announced |
Effective date: 20130522 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AT DE FR GB NL |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 632444 Country of ref document: AT Kind code of ref document: T Effective date: 20131015 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502008010662 Country of ref document: DE Effective date: 20131114 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: T3 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R026 Ref document number: 502008010662 Country of ref document: DE |
|
| PLBI | Opposition filed |
Free format text: ORIGINAL CODE: 0009260 |
|
| PLAX | Notice of opposition and request to file observation + time limit sent |
Free format text: ORIGINAL CODE: EPIDOSNOBS2 |
|
| 26 | Opposition filed |
Opponent name: BAUER MASCHINEN GMBH Effective date: 20140618 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R026 Ref document number: 502008010662 Country of ref document: DE Effective date: 20140618 |
|
| PLBB | Reply of patent proprietor to notice(s) of opposition received |
Free format text: ORIGINAL CODE: EPIDOSNOBS3 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 9 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R100 Ref document number: 502008010662 Country of ref document: DE |
|
| PLCK | Communication despatched that opposition was rejected |
Free format text: ORIGINAL CODE: EPIDOSNREJ1 |
|
| PLBN | Opposition rejected |
Free format text: ORIGINAL CODE: 0009273 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: OPPOSITION REJECTED |
|
| 27O | Opposition rejected |
Effective date: 20160419 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 10 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 11 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20220125 Year of fee payment: 15 |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Effective date: 20230513 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20230129 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20230129 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: NL Payment date: 20240123 Year of fee payment: 17 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: AT Payment date: 20240118 Year of fee payment: 17 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20240123 Year of fee payment: 17 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MM Effective date: 20250201 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MM01 Ref document number: 632444 Country of ref document: AT Kind code of ref document: T Effective date: 20250129 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20250201 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20250131 Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20250129 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20260116 Year of fee payment: 19 |