EP2093060A1 - Handhabungsvorrichtung einer Druckmaschine - Google Patents
Handhabungsvorrichtung einer Druckmaschine Download PDFInfo
- Publication number
- EP2093060A1 EP2093060A1 EP09152907A EP09152907A EP2093060A1 EP 2093060 A1 EP2093060 A1 EP 2093060A1 EP 09152907 A EP09152907 A EP 09152907A EP 09152907 A EP09152907 A EP 09152907A EP 2093060 A1 EP2093060 A1 EP 2093060A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- suction
- handling
- handling device
- suction nozzle
- printing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
- 238000007639 printing Methods 0.000 title claims description 72
- 238000007667 floating Methods 0.000 claims abstract description 12
- 239000011248 coating agent Substances 0.000 claims description 3
- 238000000576 coating method Methods 0.000 claims description 3
- 210000000056 organ Anatomy 0.000 abstract 1
- 239000011521 glass Substances 0.000 description 6
- 238000004519 manufacturing process Methods 0.000 description 6
- 230000001419 dependent effect Effects 0.000 description 2
- 238000003860 storage Methods 0.000 description 2
- 230000001464 adherent effect Effects 0.000 description 1
- 238000004026 adhesive bonding Methods 0.000 description 1
- 230000004323 axial length Effects 0.000 description 1
- 238000000151 deposition Methods 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 230000018109 developmental process Effects 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000001771 impaired effect Effects 0.000 description 1
- 238000000034 method Methods 0.000 description 1
- 230000010355 oscillation Effects 0.000 description 1
- 230000002035 prolonged effect Effects 0.000 description 1
- 238000005096 rolling process Methods 0.000 description 1
- 238000005476 soldering Methods 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
- 238000005406 washing Methods 0.000 description 1
- 238000003466 welding Methods 0.000 description 1
Images



Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41F—PRINTING MACHINES OR PRESSES
- B41F27/00—Devices for attaching printing elements or formes to supports
- B41F27/12—Devices for attaching printing elements or formes to supports for attaching flexible printing formes
- B41F27/1206—Feeding to or removing from the forme cylinder
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41P—INDEXING SCHEME RELATING TO PRINTING, LINING MACHINES, TYPEWRITERS, AND TO STAMPS
- B41P2227/00—Mounting or handling printing plates; Forming printing surfaces in situ
- B41P2227/60—Devices for transferring printing plates
- B41P2227/62—Devices for introducing printing plates
Definitions
- the invention relates to a handling device of a printing press according to the preamble of claim 1.
- a handling device of a printing machine in particular for handling of printing plates in an automated printing plate change on a printing unit of a printing machine known.
- This handling device has a manipulator arm, wherein one end of the manipulator arm is associated with a manipulator head, which has a handling member, in particular a holding member for printing plates.
- the handling member is designed as a suction device having a plurality of suction nozzles for handling printing plates, wherein each handzuschider pressure plate each have two suction nozzles are provided which are floatingly mounted on a common support member.
- This handling device has the disadvantage that due to manufacturing technology and assembly tolerances due to the suction cups designed as rubber suction cups are sucked differently when sucking a plurality of printing plates, whereby the printing plates can be added obliquely to the respective associated suction nozzles. This can lead to problems especially when placing and threading the printing plates on a plate cylinder.
- the invention is based on the object, in the o.g. Magazine further described handling device, so that at least partially a height level equalization of handling objects such as printing plates on the handling device is made possible, in particular when depositing the handling objects, however, a compensation of positioning inaccuracies and manufacturing tolerances is guaranteed.
- a handling device for a printing machine for handling handling objects in particular for handling of Printing plates in an automated printing plate change on a printing unit of a printing press, a manipulator, wherein at one end of the manipulator arm, a manipulator head is arranged, which has a handling member in the form of a suction device for the handling objects.
- the suction device has along a length of these several sections, each with at least one suction nozzle, which is mounted floatingly on a support element via connecting means, wherein each suction nozzle is associated with a stop element for limiting a suction movement of a sucked by suction handling object in the direction of the suction device.
- the handling device according to the invention is characterized in that the respective stop element of the at least one suction nozzle of each section is attached to the suction nozzle side.
- the suction nozzles may have an oval cross-section.
- each section has two suction nozzles mounted on a common support element, the abutment elements of the two suction nozzles of each section being connected to one another are.
- the stop elements of the suction nozzles of the respective sections are each mounted floating together with the respective associated suction nozzle.
- a section-dependent, formed by two stop elements stop unit or glasses at the or on the storage side of the example designed as a rubber teat suction nozzles with the latter are floatingly attached, whereby, for example. when sucking printing plates, the stop unit moves each section together with their respective suction nozzles.
- the suction nozzles of a section can move together with their respective stop unit or glasses, thereby facilitating positioning and avoiding damage to the handling object caused by displacement of the handling object on the stop elements.
- the stopper member of each suction nozzle can be moved to a set position in which it limits the suction movement of a handling object sucked by this suction nozzle toward the suction means, and can be brought to a stored position in which it does not carry out the suction movement limited.
- the stop elements section-wise and cross-sectionally together in the supplied position and in the parked position.
- the handling device Due to the possibility of the stop elements in sections, i. the two stop elements of a respective section together and the respective sections separately or together, to spend in the stored position or in the parked position, a user can the handling device according to the invention to the number and width of handling objects such. Adjust pressure plates.
- the stop elements each have a contact surface for applying a handling object, wherein the contact surface has a macro-roughness for preventing slippage of a sucked handling object on the contact surface.
- handling objects adhere to the handling device at its receiving position with a certain force when receiving them.
- An example of this is when, for example, used printing plates have to be removed from a forme cylinder.
- Such used printing plates are usually partially covered with ink, whereby the printing plate can adhere to this even after dissolving their respective voltage on the forme cylinder. This can be particularly critical after prolonged breaks in production when the deposited ink has already dried.
- Under macro-roughness according to the invention is to understand a roughness, which ensures such a sufficiently strong static friction between the contact surface of the stop elements and a voltage applied to this surface of a handling object, that a self-locking is guaranteed.
- the macro-roughness is formed by a respective coating applied to the contact surfaces.
- a vibration device is provided on the manipulator head, with which the suction nozzles of all sections are vibratable together.
- a vibration device is provided on each section of the suction device, with which the suction nozzles of the respective sections in sections are set into oscillation.
- the common or sectionally vibrating of the suction nozzles advantageously aids in releasing male adherent handling objects, such as used printing plates adhered by ink, from their receiving position.
- the vibration devices can be separately and jointly activated and deactivated.
- the handling member extends over the entire axial extension of form cylinders of a printing unit of a printing press.
- the axial extent of these forme cylinders can correspond to a multi-page-wide printing machine, in particular a 4-page width, a 6-page width, an 8-page width or a 10-page width printing press.
- the axial extension of the forme cylinders is dimensioned so that a plurality of stationary or horizontal printed pages, in particular four, six, eight or ten vertical or horizontal printed pages, can be arranged along the latter.
- a length of a section corresponds in each case to the area occupied by a stationary or lying pressure side in the axial extension of a respective one of the forme cylinders.
- Fig.1 shows a schematic representation of an embodiment according to the invention of a handling device 10 for a printing press together with a designed as a satellite printing unit printing unit 11 of a web-fed rotary printing press.
- the satellite printing unit of Fig.1 has four printing units 12, of each printing unit 12 only form cylinder 13 and transfer cylinder 14 are shown. All transfer cylinders 14 of the printing units 12 roll on a satellite cylinder 15.
- the handling device 10 is used to handle printing plates 16 during an automatic or automated printing plate change at the printing units 12 of the printing unit 11.
- Fig.1 illustrates the handling device 10 in a total of four different positions to show that it can be flexibly displaced in space. In two illustrated positions, the handling device 10 receives printing plates 16 held ready on a web guide wall 17. In the other two positions shown, however, the handling device 10 are printing plates 16 on form cylinder 13 of printing units 12 from.
- the handling device 10 comprises a manipulator arm 18 and a manipulator head 19, the manipulator head 19 having a handling member.
- the manipulator arm 18 is designed in several parts from a plurality of segments, wherein in the embodiment shown, the manipulator arm 18 comprises three segments 20, 21 and 22.
- a first segment 20 serves to connect the manipulator arm 18 to a frame or a wall of the printing machine, while a second segment 22 serves to connect the manipulator head 19 the manipulator arm 18.
- a third segment 21 serves to connect the first segment 20 to the second segment 22, wherein, in contrast to the embodiment shown, a plurality of third segments between the first segment 20 and the second segment 22 may be arranged.
- a pivot axis is formed at each end of the segments 20, 21 and 22, at each end of the segments 20, 21 and 22, at each end of the segments 20, 21 and 22, at each end of the segments 20, 21 and 22, at each end of the segments 20, 21 and 22, at each end of the segments 20, 21 and 22, at each end of the segments 20, 21 and 22, at each end of the segments 20, 21 and 22, at each end of the segments 20, 21 and 22, at each end of the segments 20, 21 and 22, at each end of the segments 20, 21 and 22, is preferably designed to be stationary.
- Each pivot axis 23, 24, 25 and 26 is a separate drive 27 associated with the pivotal movement of the segments 20, 21 and 22 relative to each other or the pivotal movement of the manipulator head 19 relative to the second segment 22 of the manipulator arm 18 and the pivoting movement of the first segment 20 of the manipulator arm 18 to ensure relative to the frame or to the wall of the printing press.
- the drives 27 are electromotive drives. About the drives 27, each segment 20, 21 and 22 of the manipulator arm 18 and the manipulator head 19 can be pivoted individually.
- each segment 20, 21 and 22 of the manipulator arm 18 is formed by two mutually parallel struts 29.
- Each end of a strut 19 and thus each end of a segment 20, 21 and 22 is associated with a pivot axis.
- the handling member is designed as a suction device 28 having a plurality of suction nozzles 30. It should be noted at this point that the handling member can be designed to be interchangeable, so z. B. to replace a suction device 28 for handling printing plates 16 by a blanket washing device or other handling member.
- the suction device 28 has along a length of these several sections 28a, 28b, 28c, 28d (see Fig.2 ) with two suction nozzles 30 each.
- two suction nozzles 30 serve to handle a pressure plate 16, so that with the in 2 to 4 shown suction device 28 a total of four printing plates 16 can be handled.
- the number of existing suction nozzles 30 is purely exemplary and on the number of per form cylinder 13 to be handled pressure plates 16 and of its axial length, which according to not shown embodiments of the invention, a 6-page widths, an 8-page widths or a 10-page wide press may depend.
- Figure 5 shows a section 28a, 28b, 28c or 28d of the suction device 28 of the manipulator head 19 with the two respective associated suction nozzles 30.
- the two suction nozzles 30 are fixed to a plate formed as a support member 31, wherein the support member 31 and thus the two suction nozzles 30 in the Suction device 28 are floating. So shows Figure 5 a total of four ball rollers 32, wherein two ball rollers 32 cooperate with an upper side of the support member 31 and two ball rollers 32 with a lower side of the support member 31.
- the cooperating with the underside of the support member 31 ball rollers 32nd are attached to a cross member 33 of the suction device 28, whereas the cooperating with the top of the support member 31 ball rollers 32 are fixed to a support plate 34.
- Fixing pins 35 of a fixing device which are axially displaceable in the direction of the arrows 36, cooperate with the ball rollers 32.
- the fixing bolts 35 penetrate the support element 31 and the cross member 33 and are guided in the cross member 33 associated guide elements 37.
- the fixing bolts 35 the floating bearing of the two suction nozzles 30 free, so that accordingly the support member 31 is tilted together with the suction nozzles 30 to some extent.
- the fixing bolts 35 are opposite the in Figure 5 shown moved downward position so that the fixing bolts 35 associated phases 38 engage in corresponding phases of the support member 31.
- the fixing bolts 35 block the floating support of the support element 31 and thus the suction nozzles 30. If, on the other hand, pressure plates 16 are transferred to a forme cylinder 13 and threaded into a clamping channel of the forme cylinder 13, then the fixing bolts enter 35, the floating mounting of the support member 31 and thus the suction nozzles 30 free.
- a negative pressure in the region of the suction nozzles 30 is provided via compressed air elements 39.
- the stop unit 40 is similar in shape to a pair of glasses.
- the stop unit 40 has two stop elements 41 and 42, which via a web 44 of a base member 43 of the stop unit 40 with each other are connected.
- the base element 43 also has two U-profile-shaped sections 45 and 46, in each of whose web portions 45b and 46b, a circular opening (not shown) is formed, whose diameter is sufficiently large, so that as in Figure 6 shown a respective associated suction nozzle 30 (here a rubber sucker) can freely extend therethrough.
- a respective associated suction nozzle 30 here a rubber sucker
- the web portions 45b, 46b are attached to the cross member 33 of the suction device 28 via fastening means (not shown) such as screws.
- the U-profile-shaped sections 45, 46 furthermore each have two leg sections 45a and 46a, which extend at opposite ends at right angles from the respectively associated web section 45b or 45a. At the free ends of the leg portions 45a and 46a, an elongated projection is formed in each case.
- Each stop element 41, 42 further comprises a stop plate 47 and 48, which in size substantially coincides with the respective associated web portion 45b and 46b and which has a circular opening which is equal in diameter to the opening of the respective web portion 45b, 46b aligned ,
- the respective stop plates 47 and 48 rest on the free ends of the respectively associated leg sections 45a and 46a, respectively, the projections provided on the leg sections 45a and 46a, respectively, engaging in corresponding recesses in the stop plates 47,48.
- the stop plates 47, 48 are attached by means of suitable attachment methods, such as gluing, soldering or welding, to the respective associated leg sections 45a and 46a.
- leg portions 45a and 46a of one side of the respective U-profile-shaped sections 45, 46 are integrally connected to each other via the web 44.
- the leg sections 45a, 46a have such an extension from their respective web section 45b or 46b that the two stop plates 47, 48 are arranged in a common plane.
- the two stopper plates 47, 48 are arranged at such a distance from the traverse 33, that the respective suction nozzle 30 protrudes freely by a predetermined minimum for sucking from the opening of the respective stopper plate 47, 48.
- the pressure plate 16 is aligned parallel to the cross member 33, wherein it is also floatingly supported by the floating mounting of the suction nozzles 30 and the stopper unit 40.
- the stop unit 40 of each section 28a-28d can be brought into a set position in which it limits the suction movement of a handling object sucked in with the suction nozzles 30 of the respective section 28a-28d in the direction of the crossbeam 33, and in FIG a parked position in which it does not limit the suction movement.
- actuators e.g. arranged in the form of pneumatic cylinders (not shown).
- the distance between the stop plates 47, 48 of the cross member 33 is adjustable to such an extent that this or the entire stop unit 40th can be moved as required in the Delivered position and in the parked position or is.
- the leg portions 45a, 46a have such an extent from their respective web portions 45b and 46b, respectively, that the two stop plates 47, 48 are located in the parked position at such a small distance from the crosshead 33 that the respective suction nozzles 30 completely free from the respective openings of the stop plates 47, 48 project, so that when sucking eg a pressure plate 16 this could not come to the stop plates 47, 48 to the plant.
- the stop plates 47, 48 are then at such a distance from the traverse 33 that the suction nozzles 30 project freely again by the minimum amount for suction from the opening of the respective stop plates 47, 48.
- the stop elements 41, 42 and the stop units 40 of all sections 28a-28d on the respective actuators sectionwise or across sections together in the set-position and in the parked position movable.
- all actuators are coupled to a control device, not shown, which can control the actuators accordingly.
- the abutment surfaces 47a, 48a of the stopper plates 47, 48 have a macro roughness for preventing slippage of a sucked handling object, such as e.g. a pressure plate 16, on the contact surfaces 47a, 48a.
- macro-roughness is meant according to the invention a roughness which has such a sufficiently strong stiction between the contact surfaces 47a, 48a and e.g. Ensures a voltage applied to this surface of a pressure plate 16 that a self-locking is guaranteed.
- the macro-roughness is formed by a coating applied to the contact surfaces 47a, 48a.
- a vibration device (not shown) is provided on the manipulator head 19, with which the suction nozzles 30 of all sections 28a-28d are oscillatable together.
- the vibration device is also coupled to the control device so that it can be activated and deactivated.
- a vibration device (not shown) is provided, with which the suction nozzles 30 of the respective sections 28a-28d are vibratable.
- the vibration devices are also coupled to the control device so that they can be separately and jointly activated and deactivated.
- the vibration device or vibration devices can / can be used, for example, to assist in threading the printing plates 16 into the clamping channel of a forme cylinder 13 and when releasing pressure plates 16 glued to the forme cylinder 13.
Landscapes
- Supply, Installation And Extraction Of Printed Sheets Or Plates (AREA)
Abstract
Description
- Die Erfindung betrifft eine Handhabungsvorrichtung einer Druckmaschine gemäß dem Oberbegriff des Anspruchs 1.
- Aus der
DE 20 2006 020 088 U1 ist eine Handhabungsvorrichtung einer Druckmaschine, insbesondere zur Handhabung von Druckplatten bei einem automatisierten Druckplattenwechsel an einer Druckeinheit einer Druckmaschine bekannt. Diese Handhabungsvorrichtung weist einen Manipulatorarm auf, wobei einem Ende des Manipulatorarms ein Manipulatorkopf zugeordnet ist, der ein Handhabungsorgan, insbesondere ein Halteorgan für Druckplatten, aufweist. Das Handhabungsorgan ist als eine mehrere Saugdüsen aufweisende Saugeinrichtung zur Handhabung von Druckplatten ausgebildet, wobei je handzuhabender Druckplatte je zwei Saugdüsen vorhanden sind, die an einem gemeinsamen Tragelement schwimmend gelagert sind. - Diese Handhabungsvorrichtung gemäß
DE 20 2006 020 088 U1 weist jedoch den Nachteil auf, dass durch fertigungstechnisch und montagetechnisch bedingte Toleranzen die als Gummisauger ausgebildeten Saugdüsen beim Ansaugen mehrerer Druckplatten unterschiedlich zusammengedrückt werden, wodurch die Druckplatten an den jeweils zugeordneten Saugdüsen schief aufgenommen werden können. Dies kann insbesondere beim Auflegen und Einfädeln der Druckplatten auf einem Formzylinder zu Problemen führen. - Eine Lösung für dieses Problem ist aus der Zeitschrift "Deutscher Drucker", Ausgabe Nr.17 vom 31.05.2007, bekannt, wobei die in
DE 20 2006 020 088 U1 beschriebene Handhabungsvorrichtung derart weiterentwickelt wurde, dass an dem Handhabungsorgan für jede Saugdüse ein fest fixierter Anschlag in Form eines Winkelelements angeformt ist, wobei sich ein erster Schenkel des Winkelelements von dem Handhabungsorgan in Längsrichtung des jeweiligen Gummisaugers erstreckt und sich ein zweiter Schenkel des Winkelelements von dem ersten Schenkel rechtwinklig, quer zur Längsrichtung der jeweiligen Saugdüse erstreckt. In dem zweiten Schenkel ist eine Öffnung vorgesehen, durch welche hindurch sich die jeweilige Saugdüse erstreckt. Damit bildet das jeweilige Winkelelement eine fest fixierte "Brille" für die jeweilige Saugdüse. Die zweiten Schenkel aller Winkelelemente befinden sich in einer Ebene. - Beim Ansaugen von Druckplatten werden diese mit ihrer Druckfläche gegen die jeweiligen zweiten Schenkel der Winkelelemente bzw. "Brillen" der Saugdüsen gezogen, so dass die Druckplatten in einer gemeinsamen Ebene bzw. einem gleichen Höhenniveau fixiert sind. Nachteilig an dieser Lösung ist jedoch, dass durch die Fixierung der Druckplatten an den Winkelelementen bzw. "Brillen" die Schwimmende Lagerung der Saugdüsen außer Kraft gesetzt wird, wodurch insbesondere beim Auflegen und Einfädeln der Druckplatten auf einem Formzylinder infolge von Positionierungenauigkeiten bzw. Fertigungstoleranzen Probleme auftreten können.
- Der Erfindung liegt die Aufgabe zugrunde, die in der o.g. Zeitschrift beschriebene Handhabungsvorrichtung weiterzuentwickeln, so dass zumindest abschnittsweise eine höhenniveaugleiche Fixierung von Handhabungsobjekten wie Druckplatten an der Handhabungsvorrichtung ermöglicht ist, wobei insbesondere beim Ablegen der Handhabungsobjekte dennoch ein Ausgleich von Positionierungenauigkeiten bzw. Fertigungstoleranzen gewährleistet ist.
- Dies wird durch eine Handhabungsvorrichtung gemäß Anspruch 1 erreicht. Weiterbildungen der Erfindung sind in den abhängigen Ansprüchen beschrieben.
- Gemäß der Erfindung weist eine Handhabungsvorrichtung für eine Druckmaschine zur Handhabung von Handhabungsobjekten, insbesondere zur Handhabung von Druckplatten bei einem automatisierten Druckplattenwechsel an einer Druckeinheit einer Druckmaschine, einen Manipulatorarm auf, wobei an einem Ende des Manipulatorarms ein Manipulatorkopf angeordnet ist, der ein Handhabungsorgan in Form einer Saugeinrichtung für die Handhabungsobjekte aufweist. Die Saugeinrichtung weist entlang einer Länge dieser mehrere Sektionen mit jeweils wenigstens einer Saugdüse auf, die über Verbindungsmittel schwimmend an einem Tragelement gelagert ist, wobei jeder Saugdüse ein Anschlagelement zugeordnet ist zum Begrenzen einer Ansaugbewegung eines per Saugdüse angesaugten Handhabungsobjektes in Richtung auf die Saugeinrichtung zu. Die erfindungsgemäße Handhabungsvorrichtung ist dadurch gekennzeichnet, dass das jeweilige Anschlagelement der wenigstens einen Saugdüse jeder Sektion saugdüsenseitig befestigt ist.
- Damit ist gewährleistet, dass ein Handhabungsobjekt wie eine Druckplatte über die Druckplattenbreite hinweg hohenniveaugleich an dem Manipulatorkopf aufgenommen werden kann, wobei durch die saugdüsenseitige, separate Befestigung der Anschlagelemente gewährleistet ist, dass ein aufgenommenes Handhabungsobjekt so ausreichend flexibel an der Saugdüse und dem zugeordneten Anschlagelement fixiert ist, dass ein Ausgleich von Positionierungenauigkeiten bzw. Fertigungstoleranzen gewährleistet ist.
- Gemäß einer Ausführungsform der Erfindung können die Saugdüsen einen ovalen Querschnitt aufweisen.
- Mit dieser Ausgestaltung ist es möglich, eine größere Strecke entlang der Länge einer jeden Sektion mit der Saugdüse abzudecken, wodurch ein aufgenommenes Handhabungsobjekte verkippsicherer gehalten werden kann.
- Gemäß einer Ausführungsform der Erfindung weist jede Sektion zwei an einem gemeinsamen Tragelement gelagerte Saugdüsen auf, wobei die Anschlagelemente der beiden Saugdüsen jeder Sektion miteinander verbunden sind.
- Gemäß einer Ausführungsform der Erfindung sind die Anschlagelemente der Saugdüsen der jeweiligen Sektionen jeweils gemeinsam mit der jeweils zugeordneten Saugdüse schwimmend gelagert.
- Mit anderen Worten kann gemäß einer Ausführungsform der Erfindung jeweils eine sektionsabhängige, von jeweils zwei Anschlagelementen gebildete Anschlageinheit bzw. Brille an den bzw. auf der Lagerungsseite der beispielsweise als Gummisaugern ausgebildeten Saugdüsen mit diesen schwimmend befestigt sein, wodurch sich z.B. beim Ansaugen von Druckplatten die Anschlageinheit jeder Sektion gemeinsam mit ihren jeweiligen Saugdüsen bewegt.
- Dadurch wird verhindert, dass durch die Reibkräfte zwischen der Anschlageinheit einer jeweiligen Sektion und einem dort angesaugten Handhabungsobjekt wie einer Druckplatte beim Positionieren des Handhabungsobjektes an einer Ablageposition die schwimmende Lagerung der Saugdüsen außer Kraft gesetzt ist. Somit können sich bei Positionierungenauigkeiten bzw. Fertigungstoleranzen die Saugdüsen einer Sektion gemeinsam mit ihrer jeweiligen Anschlageinheit bzw. Brille bewegen, wodurch das Positionieren erleichtert und durch Verschieben des Handhabungsobjektes an den Anschlagelementen verursachte Beschädigungen an dem Handhabungsobjekt vermieden werden.
- Gemäß einer Ausführungsform der Erfindung ist das Anschlagelement jeder Saugdüse in eine Zugestellt-Position verbringbar, in der es die Ansaugbewegung eines mit dieser Saugdüse angesaugten Handhabungsobjektes in Richtung auf die Saugeinrichtung zu begrenzt, und in eine Abgestellt-Position verbringbar, in der es die Ansaugbewegung nicht begrenzt.
- Gemäß einer Ausführungsform der Erfindung sind die Anschlagelemente sektionsweise und sektionsübergreifend gemeinsam in die Zugestellt-Position und in die Abgestellt-Position verbringbar.
- Durch die Möglichkeit, die Anschlagelemente sektionsweise, d.h. die beiden Anschlagelemente einer jeweiligen Sektion gemeinsam und die jeweiligen Sektionen separat oder gemeinsam, in die Zugestellt-Position oder in die Abgestellt-Position zu verbringen, kann ein Nutzer die erfindungsgemäße Handhabungsvorrichtung an die Anzahl und die Breite von Handhabungsobjekten wie z.B. Druckplatten anpassen.
- D.h., es ist somit beispielsweise möglich, an einem Formzylinder einer Druckeinheit einer Druckmaschine nur einen Teil einer auf dem Formzylinder angeordneten bzw. anordenbaren Anzahl von Druckplatten zu wechseln bzw. aufzulegen, wobei nicht zu wechselnde Druckplatten bzw. benachbarte Sektionen nicht beschädigt bzw. beeinträchtigt werden.
- Gemäß einer Ausführungsform der Erfindung weisen die Anschlagelemente jeweils eine Anlagefläche auf zum Anlegen eines Handhabungsobjektes, wobei die Anlagefläche eine Makro-Rauheit aufweist zum Verhindern eines Verrutschens eines angesaugten Handhabungsobjektes an der Anlagefläche.
- Dies ist insbesondere dann von Vorteil, wenn die Handhabungsobjekte bei Aufnehmen dieser mit der Handhabungsvorrichtung an ihrer Aufnahmeposition mit einer bestimmten Kraft anhaften. Ein Beispiel dafür ist, wenn z.B. gebrauchte Druckplatten von einem Formzylinder zu entfernen sind. Solch gebrauchte Druckplatten sind in der Regel teilweise mit Druckfarbe belegt, wodurch die Druckplatte auch nach Lösen ihrer jeweiligen Spannung auf dem Formzylinder an diesem anhaften kann. Besonders kritisch kann dies nach längeren Produktionspausen sein, wenn die abgelegte Druckfarbe bereits getrocknet ist.
- Unter Makro-Rauheit ist erfindungsgemäß eine Rauheit zu verstehen, welche eine so ausreichend starke Haftreibung zwischen der Anlagefläche der Anschlagelemente und einer an dieser anliegenden Oberfläche eines Handhabungsobjektes gewährleistet, dass eine Selbsthemmung gewährleistet ist.
- Gemäß einer Ausführungsform der Erfindung ist die Makro-Rauheit durch eine jeweils auf die Anlageflächen aufgebrachte Beschichtung gebildet.
- Gemäß einer Ausführungsform der Erfindung ist an dem Manipulatorkopf eine Vibrationseinrichtung vorgesehen, mit der die Saugdüsen aller Sektionen gemeinsam in Schwingung versetzbar sind.
- Gemäß einer alternativen Ausführungsform der Erfindung ist an jeder Sektion der Saugeinrichtung eine Vibrationseinrichtung vorgesehen, mit der die Saugdüsen der jeweiligen Sektionen sektionsweise in Schwingung versetzbar sind.
- Das gemeinsame oder sektionsweise in Schwingung versetzen der Saugdüsen unterstützt in vorteilhafter Weise ein Lösen von aufzunehmenden, anhaftenden Handhabungsobjekten, wie beispielsweise durch Druckfarbe festgeklebten gebrauchten Druckplatten, von ihrer Aufnahmeposition.
- Gemäß einer Ausführungsform der Erfindung sind, wenn an jeder Sektion eine Vibrationseinrichtung vorgesehen ist, die Vibrationseinrichtungen separat und gemeinsam aktivierbar und deaktivierbar.
- Gemäß einer Ausführungsform der Erfindung erstreckt sich das Handhabungsorgan über die gesamte axiale Erstreckung von Formzylindern einer Druckeinheit einer Druckmaschine.
- In diesem Kontext ist zu erwähnen, dass erfindungsgemäß die axiale Erstreckung dieser Formzylinder einer mehrseitenbreiten Druckmaschine, insbesondere einer 4-seitenbreiten, einer 6-seitenbreiten, einer 8-seitenbreiten oder einer 10-seitenbreiten Druckmaschine, entsprechen kann. D.h., die axiale Erstreckung der Formzylinder ist so bemessen, dass entlang dieser eine Mehrzahl von stehenden oder liegenden Druckseiten, insbesondere vier, sechs, acht oder zehn stehende oder liegende Druckseiten angeordnet werden können.
- Gemäß einer Ausführungsform der Erfindung entspricht eine Länge einer Sektion jeweils dem Bereich, den eine stehende oder liegende Druckseite in der axialen Erstreckung eines jeweiligen der Formzylinder in Anspruch nimmt.
- Die Erfindung wird nun anhand einer bevorzugten Ausführungsform und unter Bezugnahme auf die beigefügte Zeichnung beschrieben.
- Fig.1
- zeigt eine schematisierte Darstellung einer Druckeinheit einer Rollendruckmaschine zusammen mit einer erfindungsgemäßen Handhabungsvorrichtung.
- Fig.2
- zeigt in perspektivischer Ansicht den Grundaufbau einer erfindungsgemäßen Handhabungsvorrichtung, wobei die Anschlageinheit weggelassen ist.
- Fig.3
- zeigt in einer Seitenansicht die Handhabungsvorrichtung von
Fig.2 , wobei die Anschlageinheit weggelassen ist. - Fig.4
- zeigt in einer Vorderansicht die Handhabungsvorrichtung der
Fig.2 , wobei die Anschlageinheit weggelassen ist. - Fig.5
- zeigt eine Sektion der Handhabungsvorrichtung von
Fig.2 , wobei die Anschlageinheit weggelassen ist. - Fig.6
- zeigt in perspektivischer Ansicht eine Sektion der erfindungsgemäßen Handhabungsvorrichtung von
Fig.2 , wobei die Anschlageinheit mit ihren Anschlagelementen an die Saugeinrichtung montiert ist. -
Fig.1 zeigt eine schematisierte Darstellung einer erfindungsgemäßen Ausführungsform einer Handhabungsvorrichtung 10 für eine Druckmaschine zusammen mit einer als Satellitendruckeinheit ausgebildeten Druckeinheit 11 einer Rollenrotationsdruckmaschine. Die Satellitendruckeinheit derFig.1 verfügt über vier Druckwerke 12, wobei von jedem Druckwerk 12 ausschließlich Formzylinder 13 sowie Übertragungszylinder 14 dargestellt sind. Sämtliche Übertragungszylinder 14 der Druckwerke 12 rollen auf einem Satellitenzylinder 15 ab. - In der gezeigten Ausführungsform dient die erfindungsgemäße Handhabungsvorrichtung 10 der Handhabung von Druckplatten 16 bei einem automatischen bzw. automatisierten Druckplattenwechsel an den Druckwerken 12 der Druckeinheit 11.
Fig.1 stellt die Handhabungsvorrichtung 10 in insgesamt vier unterschiedlichen Positionen dar, um zu zeigen, dass dieselbe flexibel im Raum verlagert werden kann. In zwei dargestellten Positionen nimmt die Handhabungsvorrichtung 10 an einer Bahnführungswand 17 bereitgehaltene Druckplatten 16 auf. In den beiden anderen dargestellten Positionen hingegen gibt die Handhabungsvorrichtung 10 Druckplatten 16 an Formzylinder 13 von Druckwerken 12 ab. -
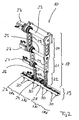
Fig.2 bis 4 zeigen den Grundaufbau der erfindungsgemäßen Handhabungsvorrichtung 10 in größerem Detail. So umfasst die Handhabungsvorrichtung 10 einen Manipulatorarm 18 und einen Manipulatorkopf 19, wobei der Manipulatorkopf 19 ein Handhabungsorgan aufweist. - Der Manipulatorarm 18 ist erfindungsgemäß mehrteilig aus mehreren Segmenten ausgebildet, wobei in der gezeigten Ausführungsform der Manipulatorarm 18 drei Segmente 20, 21 und 22 umfasst. Ein erstes Segment 20 dient der Anbindung des Manipulatorarms 18 an ein Gestell bzw. eine Wand der Druckmaschine, ein zweites Segment 22 dient hingegen der Anbindung des Manipulatorkopfs 19 an den Manipulatorarm 18. Ein drittes Segment 21 dient der Verbindung des ersten Segments 20 mit dem zweiten Segment 22, wobei im Unterschied zur gezeigten Ausführungsform auch mehrere dritte Segmente zwischen dem ersten Segment 20 und dem zweiten Segment 22 angeordnet sein können.
- An jedem Ende der Segmente 20, 21 und 22 ist eine Schwenkachse ausgebildet. So ist an dem Ende des ersten Segments 20, über welches der Manipulatorarm 18 an das Gestell bzw. die Wand der Druckmaschine angebunden ist, eine erste Schwenkachse 23 ausgebildet. Eine zweite Schwenkachse 24 ist an dem Ende des zweiten Segments 23 ausgebildet, welches der Anbindung des Manipulatorkopfs 19 an den Manipulatorarm 18 dient. Weitere Schwenkachsen 25 und 26 sind an den Enden der Segmente 20, 21 und 22 ausgebildet, an denen das erste Segment 20 mit dem dritten Segment 21 sowie das zweite Segment 22 mit dem dritten Segment 21 verbunden ist. Die Schenkachse 23, die der Anbindung des Manipulatorarms 18 an das Gestell bzw. die Wand der Druckmaschine dient, ist vorzugsweise ortsfest ausgeführt.
- Jeder Schwenkachse 23, 24, 25 und 26 ist ein separater Antrieb 27 zugeordnet, um die Schwenkbewegung der Segmente 20, 21 und 22 relativ zueinander bzw. die Schwenkbewegung des Manipulatorkopfs 19 relativ zum zweiten Segment 22 des Manipulatorarms 18 bzw. die Schwenkbewegung des ersten Segments 20 des Manipulatorarms 18 relativ zum Gestell bzw. zur Wand der Druckmaschine zu gewährleisten. Bei den Antrieben 27 handelt es sich um elektromotorische Antriebe. Über die Antriebe 27 kann jedes Segment 20, 21 und 22 des Manipulatorarms 18 sowie der Manipulatorkopf 19 individuell verschwenkt werden.
- In der gezeigten Ausführungsform wird jedes Segment 20, 21 und 22 des Manipulatorarms 18 von zwei parallel zueinander verlaufenden Streben 29 gebildet. Jedem Ende einer Strebe 19 und damit jedem Ende eines Segments 20, 21 und 22 ist eine Schwenkachse zugeordnet.
- In der gezeigten Ausführungsform ist das Handhabungsorgan als eine mehrere Saugdüsen 30 aufweisende Saugeinrichtung 28 ausgebildet. Es sei an dieser Stelle darauf hingewiesen, dass das Handhabungsorgan auswechselbar ausgebildet sein kann, um so z. B. eine Saugeinrichtung 28 zur Handhabung von Druckplatten 16 durch eine Gummituchwascheinrichtung oder ein sonstiges Handhabungsorgan zu ersetzen. Das Handhabungsorgan 28, welches in der gezeigten Ausführungsform als Saugeinrichtung 28 ausgebildet ist, erstreckt sich über die gesamte axiale Erstreckung der Formzylinder 13 der Druckwerke 12 der Druckeinheit 11.
- Die Saugeinrichtung 28 weist entlang einer Länge dieser mehrere Sektionen 28a, 28b, 28c, 28d (siehe
Fig.2 ) mit jeweils zwei Saugdüsen 30 auf. Gemäß dieser Ausführungsform dienen je zwei Saugdüsen 30 der Handhabung einer Druckplatte 16, so dass mit der inFig.2 bis 4 gezeigten Saugeinrichtung 28 insgesamt vier Druckplatten 16 gehandhabt werden können. Es sei darauf hingewiesen, dass die Anzahl der vorhandenen Saugdüsen 30 rein exemplarisch ist und von der Anzahl der je Formzylinder 13 handzuhabenden Druckplatten 16 bzw. von dessen axialer Länge, welche gemäß nicht dargestellten Ausführungsformen der Erfindung auch einer 6-seitenbreiten, einer 8-seitenbreiten oder einer 10-seitenbreiten Druckmaschine entsprechen kann, abhängt. -
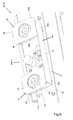
Fig.5 zeigt eine Sektion 28a, 28b, 28c oder 28d der Saugeinrichtung 28 des Manipulatorkopfs 19 mit den beiden jeweils zugehörigen Saugdüsen 30. Die beiden Saugdüsen 30 sind an einem als Platte ausgebildeten Tragelement 31 befestigt, wobei das Tragelement 31 und damit die beiden Saugdüsen 30 in der Saugeinrichtung 28 schwimmend gelagert sind. So zeigtFig.5 insgesamt vier Kugelrollen 32, wobei zwei Kugelrollen 32 mit einer oberen Seite des Tragelements 31 und zwei Kugelrollen 32 mit einer unteren Seite des Tragelements 31 zusammenwirken. - Die mit der Unterseite des Tragelements 31 zusammenwirkenden Kugelrollen 32 sind an einer Traverse 33 der Saugeinrichtung 28 befestigt, wohingegen die mit der Oberseite des Tragelements 31 zusammenwirkenden Kugelrollen 32 an einer Tragplatte 34 befestigt sind.
- Mit den Kugelrollen 32 wirken Fixierbolzen 35 einer Fixiereinrichtung zusammen, die in Richtung der Pfeile 36 axial verschiebbar sind. Die Fixierbolzen 35 durchdringen das Tragelement 31 sowie die Traverse 33 und sind in der Traverse 33 zugeordneten Führungselementen 37 geführt. In der Darstellung der
Fig.5 geben die Fixierbolzen 35 die schwimmende Lagerung der beiden Saugdüsen 30 frei, so dass demnach das Tragelement 31 zusammen mit den Saugdüsen 30 in gewissem Umfang kippbar ist. Zur Fixierung des Tragelements 31 und damit zur Blockierung der schwimmenden Lagerung der Saugdüsen 30 werden die Fixierbolzen 35 gegenüber der inFig.5 dargestellten Position nach unten bewegt, so dass den Fixierbolzen 35 zugeordnete Phasen 38 in entsprechende Phasen des Tragelements 31 eingreifen. Dann, wenn Druckplatten 16 aufgenommen und transportiert werden sollen, blockieren die Fixierbolzen 35 die schwimmende Lagerung des Tragelements 31 und damit der Saugdüsen 30. Sollen hingegen Druckplatten 16 an einen Formzylinder 13 übergeben und in einen Spannkanal des Formzylinders 13 eingefädelt werden, so geben die Fixierbolzen 35 die schwimmende Lagerung des Tragelements 31 und damit der Saugdüsen 30 frei. - Ein Unterdruck im Bereich der Saugdüsen 30 wird über Druckluftelemente 39 bereitgestellt.
- Nun wird auf
Fig.6 Bezug genommen, in der eine der Sektionen 28a-28d der Saugeinrichtung 28 mit einer daran montierten, erfindungsgemäßen Anschlageinheit 40 gezeigt ist. - Wie aus
Fig.6 ersichtlich, ähnelt die Anschlageinheit 40 in ihrer Form einer Brille. Die Anschlageinheit 40 weist zwei Anschlagelemente 41 und 42 auf, die über einen Steg 44 eines Basiselements 43 der Anschlageinheit 40 miteinander verbunden sind. - Das Basiselement 43 weist ferner zwei U-Profil-förmige Abschnitte 45 und 46 auf, in deren jeweiligen Stegabschnitten 45b bzw. 46b jeweils eine kreisrunde Öffnung (nicht gezeigt) ausgebildet ist, deren Durchmesser ausreichend groß ist, so dass sich wie in
Fig.6 gezeigt eine jeweils zugeordnete Saugdüse 30 (hier ein Gummisauger) frei durch diese hindurch erstrecken kann. - Die Stegabschnitte 45b, 46b sind über nicht gezeigte Befestigungsmittel (wie z.B. Schrauben) jeweils an der Traverse 33 der Saugeinrichtung 28 angebracht.
- Die U-Profil-förmigen Abschnitte 45, 46 weisen ferner jeweils zwei Schenkelabschnitte 45a bzw. 46a auf, die sich an gegenüberliegenden Enden rechtwinklig von dem jeweils zugehörigen Stegabschnitt 45b bzw. 45a erstrecken. An die freien Enden der Schenkelabschnitte 45a und 46a ist jeweils ein länglicher Vorsprung angeformt.
- Jedes Anschlagelement 41, 42 weist ferner eine Anschlagplatte 47 bzw. 48 auf, die in ihrer Größe im Wesentlichen mit dem jeweils zugeordneten Stegabschnitt 45b bzw. 46b übereinstimmt und die eine kreisrunde Öffnung aufweist, welche durchmessergleich zu der Öffnung des jeweiligen Stegabschnitts 45b, 46b fluchtet.
- Die jeweiligen Anschlagplatten 47 und 48 liegen auf den freien Enden der jeweils zugeordneten Schenkelabschnitte 45a bzw. 46a auf, wobei die an den Schenkelabschnitten 45a bzw. 46a vorgesehenen Vorsprünge in entsprechende Aussparungen in den Anschlagplatten 47, 48 eingreifen. Die Anschlagplatten 47, 48 sind mittels geeigneter Befestigungsverfahren, wie z.B. Kleben, Löten oder Schweißen, an den jeweils zugeordneten Schenkelabschnitten 45a bzw. 46a befestigt.
- Die Schenkelabschnitte 45a und 46a einer Seite der jeweiligen U-Profil-förmigen Abschnitte 45, 46 sind über den Steg 44 integral bzw. einstückig miteinander verbunden.
- Erfindungsgemäß weisen die Schenkelabschnitte 45a, 46a eine solche Erstreckung von ihrem jeweiligen Stegabschnitt 45b bzw. 46b auf, dass die beiden Anschlagplatten 47, 48 in einer gemeinsamen Ebene angeordnet sind. Gemäß dieser Ausführungsform sind die beiden Anschlagplatten 47, 48 in solch einem Abstand von der Traverse 33 angeordnet, dass die jeweilige Saugdüse 30 um ein vorbestimmtes Mindestmaß zum Ansaugen aus der Öffnung der jeweiligen Anschlagplatte 47, 48 frei vorsteht.
- Wird nun ein Handhabungsobjekt wie eine Druckplatte 16 mittels der beiden als Gummisauger ausgebildeten Saugdüsen 30 einer Sektion 28a-28d angesaugt, werden die Saugdüsen 30 so weit zusammengedrückt, bis die Druckplatte 16 an jeweiligen Anlageflächen 47a bzw. 48a der Anschlagplatten 47, 48 zur Anlage kommt.
- Damit ist die Druckplatte 16 parallel zur Traverse 33 ausgerichtet, wobei sie durch die schwimmende Lagerung der Saugdüsen 30 und der Anschlageinheit 40 ebenfalls schwimmend gelagert ist.
- Gemäß einer Ausführungsform der Erfindung ist die Anschlageinheit 40 jeder Sektion 28a-28d in eine Zugestellt-Position verbringbar, in der sie die Ansaugbewegung eines mit den Saugdüsen 30 der jeweiligen Sektion 28a-28d angesaugten Handhabungsobjektes in Richtung auf die Traverse 33 zu begrenzt, und in eine Abgestellt-Position verbringbar, in der sie die Ansaugbewegung nicht begrenzt.
- Zu diesem Zweck sind gemäß einer Ausführungsform der Erfindung zwischen der Traverse 33 und den Stegabschnitten 45b, 46b der beiden U-Profil-förmigen Abschnitte 45 und 46 des Basiselements 43 Stellglieder z.B. in Form von Pneumatikzylindern (nicht gezeigt) angeordnet. Mittels der gemeinsam angesteuerten Pneumatikzylinder einer jeweiligen Sektion 28a-28d, welche die Stegabschnitte 45b, 46b und die Traverse 33 verbinden, ist der Abstand der Anschlagplatten 47, 48 von der Traverse 33 um ein solches Maß verstellbar, dass diese bzw. die gesamte Anschlageinheit 40 je nach Bedarf in die Zugestellt-Position und in die Abgestellt-Position verfahrbar sind bzw. ist.
- Bei dieser Ausführungsform weisen die Schenkelabschnitte 45a, 46a eine solche Erstreckung von ihrem jeweiligen Stegabschnitt 45b bzw. 46b auf, dass die beiden Anschlagplatten 47, 48 in der Abgestellt-Position in solch einem geringen Abstand von der Traverse 33 angeordnet sind, dass die jeweiligen Saugdüsen 30 vollständig frei aus den jeweiligen Öffnungen der Anschlagplatten 47, 48 vorstehen, so dass beim Ansaugen von z.B. einer Druckplatte 16 diese nicht an den Anschlagplatten 47, 48 zur Anlage kommen könnte. In der Zugestellt-Position befinden sich die Anschlagplatten 47, 48 dann in solch einem Abstand zur Traverse 33, dass die Saugdüsen 30 wieder um das Mindestmaß zum Ansaugen aus der Öffnung der jeweiligen Anschlagplatten 47, 48 frei vorstehen.
- Um ein Federn der Pneumatikzylinder in der Zugestellt-Position zu verhindern, können diese zusätzlich über eine selektiv aktivierbare Verriegelung verfügen.
- Gemäß einer Ausführungsform der Erfindung sind die Anschlagelemente 41, 42 bzw. die Anschlageinheiten 40 aller Sektionen 28a-28d über die jeweiligen Stellglieder sektionsweise oder sektionsübergreifend gemeinsam in die Zugestellt-Position und in die Abgestellt-Position verfahrbar. Zu diesem Zweck sind alle Stellglieder mit einer nicht gezeigten Steuervorrichtung gekoppelt, welche die Stellglieder dementsprechend ansteuern kann.
- Gemäß einer Ausführungsform der Erfindung weisen die Anlageflächen 47a, 48a der Anschlagplatten 47, 48 eine Makro-Rauheit auf zum Verhindern eines Verrutschens eines angesaugten Handhabungsobjektes, wie z.B. einer Druckplatte 16, an den Anlageflächen 47a, 48a. Unter Makro-Rauheit ist erfindungsgemäß eine Rauheit zu verstehen, welche eine so ausreichend starke Haftreibung zwischen den Anlageflächen 47a, 48a und z.B. einer an diesen anliegenden Oberfläche einer Druckplatte 16 gewährleistet, dass eine Selbsthemmung gewährleistet ist.
- Gemäß einer Ausführungsform der Erfindung ist die Makro-Rauheit durch eine jeweils auf die Anlageflächen 47a, 48a aufgebrachte Beschichtung gebildet.
- Gemäß einer Ausführungsform der Erfindung ist an dem Manipulatorkopf 19 eine Vibrationseinrichtung (nicht dargestellt) vorgesehen, mit der die Saugdüsen 30 aller Sektionen 28a-28d gemeinsam in Schwingung versetzbar sind. Die Vibrationseinrichtung ist ebenfalls mit der Steuervorrichtung gekoppelt, so dass sie aktivierbar und deaktivierbar ist.
- Gemäß einer alternativen Ausführungsform der Erfindung ist an jeder Sektion 28a-28d der Saugeinrichtung 28 eine Vibrationseinrichtung (nicht dargestellt) vorgesehen, mit der die Saugdüsen 30 der jeweiligen Sektionen 28a-28d in Schwingung versetzbar sind. Die Vibrationseinrichtungen sind ebenfalls mit der Steuervorrichtung gekoppelt, so dass sie separat und gemeinsam aktivierbar und deaktivierbar sind.
- Die Vibrationseinrichtung bzw. Vibrationseinrichtungen kann/können beispielsweise zur Unterstützung beim Einfädeln der Druckplatten 16 in den Spannkanal eines Formzylinders 13 und beim Lösen von auf dem Formzylinder 13 festgeklebten Druckplatten 16 eingesetzt werden.
-
- 10
- Handhabungsvorrichtung
- 11
- Druckeinheit
- 12
- Druckwerk
- 13
- Formzylinder
- 14
- Übertagungszylinder
- 15
- Satellitenzylinder
- 16
- Druckplatte
- 17
- Bahnführungswand
- 18
- Manipulatorarm
- 19
- Manipulatorkopf
- 20
- Segment
- 21
- Segment
- 22
- Segment
- 23
- Schwenkachse
- 24
- Schwenkachse
- 25
- Schwenkachse
- 26
- Schwenkachse
- 27
- Antrieb
- 28
- Handhabungsorgan/Saugeinrichtung
- 28a
- Sektion
- 28b
- Sektion
- 28c
- Sektion
- 28d
- Sektion
- 29
- Strebe
- 30
- Saugdüse
- 31
- Tragelement
- 32
- Kugelrollen
- 33
- Traverse
- 34
- Tragplatte
- 35
- Fixierbolzen
- 36
- Pfeil
- 37
- Führungselement
- 38
- Phase
- 39
- Druckluftelement
- 40
- Anschlageinheit
- 41
- Anschlagelement
- 42
- Anschlagelement
- 43
- Basiselement
- 44
- Steg
- 45
- U-Profil-förmiger Abschnitt
- 45a
- Schenkelabschnitte
- 45b
- Stegabschnitt
- 46
- U-Profil-förmiger Abschnitt
- 46a
- Schenkelabschnitte
- 46b
- Stegabschnitt
- 47
- Anschlagplatte
- 47a
- Anlagefläche
- 48
- Anschlagplatte
- 48a
- Anlagefläche
Claims (11)
- Handhabungsvorrichtung (10) für eine Druckmaschine zur Handhabung von Handhabungsobjekten, insbesondere zur Handhabung von Druckplatten (16) bei einem automatisierten Druckplattenwechsel an einer Druckeinheit (11) einer Druckmaschine, mit einem Manipulatorarm (18), wobei an einem Ende des Manipulatorarms (18) ein Manipulatorkopf (19) angeordnet ist, der ein Handhabungsorgan in Form einer Saugeinrichtung (28) für die Handhabungsobjekte aufweist, wobei die Saugeinrichtung (28) entlang einer Länge dieser mehrere Sektionen (28a-28d) mit jeweils wenigstens einer Saugdüse (30) aufweist, die über Verbindungsmittel (32, 33) schwimmend an einem Tragelement (34) gelagert ist, und wobei jeder Saugdüse (30) ein Anschlagelement (41, 42) zugeordnet ist zum Begrenzen einer Ansaugbewegung eines per Saugdüse (30) angesaugten Handhabungsobjektes in Richtung auf die Saugeinrichtung (28) zu, dadurch gekennzeichnet, dass das jeweilige Anschlagelement (41, 42) der wenigstens einen Saugdüse (30) jeder Sektion (28a-28d) saugdüsenseitig befestigt ist.
- Handhabungsvorrichtung (10) nach Anspruch 1, dadurch gekennzeichnet, dass jede Sektion (28a-28d) zwei an einem gemeinsamen Tragelement (34) gelagerte Saugdüsen (30) aufweist, wobei die Anschlagelemente (41, 42) der beiden Saugdüsen (30) jeder Sektion miteinander verbunden sind
- Handhabungsvorrichtung (10) nach Anspruch 1 oder 2, dadurch gekennzeichnet, dass die Anschlagelemente (41, 42) der Saugdüsen (30) der jeweiligen Sektionen (28a-28d) jeweils gemeinsam mit der jeweils zugeordneten Saugdüse (30) schwimmend gelagert sind.
- Handhabungsvorrichtung (10) nach einem der Ansprüche 1 bis 3, dadurch gekennzeichnet, dass das Anschlagelement (41, 42) jeder Saugdüse (30) in eine Zugestellt-Position verbringbar ist, in der es die Ansaugbewegung eines mit dieser Saugdüse (30) angesaugten Handhabungsobjektes in Richtung auf die Saugeinrichtung (28) zu begrenzt, und in eine Abgestellt-Position verbringbar ist, in der es die Ansaugbewegung nicht begrenzt.
- Handhabungsvorrichtung 10 nach Anspruch 4, dadurch gekennzeichnet, dass die Anschlagelemente (41, 42) sektionsweise und sektionsübergreifend gemeinsam in die Zugestellt-Position und in die Abgestellt-Position verbringbar sind.
- Handhabungsvorrichtung (10) nach einem der Ansprüche 1 bis 5, dadurch gekennzeichnet, dass die Anschlagelemente (41, 42) jeweils eine Anlagefläche (47a, 48a) aufweisen zum Anlegen eines Handhabungsobjektes, wobei die Anlagefläche (47a, 48a) eine Makro-Rauheit aufweist zum Verhindern eines Verrutschens eines angesaugten Handhabungsobjektes an der Anlagefläche (47a, 48a).
- Handhabungsvorrichtung (10) nach Anspruch 6, dadurch gekennzeichnet, dass die Makro-Rauheit durch eine jeweils auf die Anlageflächen (47a, 48a) aufgebrachte Beschichtung gebildet ist.
- Handhabungsvorrichtung (10) nach einem der Ansprüche 1 bis 7, dadurch gekennzeichnet, dass an dem Manipulatorkopf (19) eine Vibrationseinrichtung vorgesehen ist, mit der die Saugdüsen (30) aller Sektionen (28a-28d) gemeinsam in Schwingung versetzbar sind.
- Handhabungsvorrichtung (10) nach einem der Ansprüche 1 bis 7, dadurch gekennzeichnet, dass an jeder Sektion (28a-28d) der Saugeinrichtung (28) eine Vibrationseinrichtung vorgesehen ist, mit der die Saugdüsen (30) der jeweiligen Sektionen (28a-28d) in Schwingung versetzbar sind.
- Handhabungsvorrichtung (10) nach Anspruch 9, dadurch gekennzeichnet, dass die Vibrationseinrichtungen separat und gemeinsam aktivierbar und deaktivierbar sind.
- Handhabungsvorrichtung (10) nach einem der Ansprüche 1 bis 10, dadurch gekennzeichnet, dass sich die Saugeinrichtung (28) über die gesamte axiale Erstreckung von Formzylindern (13) der Druckeinheit (11) der Druckmaschine erstreckt.
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102008010598A DE102008010598A1 (de) | 2008-02-22 | 2008-02-22 | Handhabungsvorrichtung einer Druckmaschine |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| EP2093060A1 true EP2093060A1 (de) | 2009-08-26 |
Family
ID=40622281
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP09152907A Withdrawn EP2093060A1 (de) | 2008-02-22 | 2009-02-16 | Handhabungsvorrichtung einer Druckmaschine |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US20090211478A1 (de) |
| EP (1) | EP2093060A1 (de) |
| JP (1) | JP2009196360A (de) |
| CN (1) | CN101554795B (de) |
| CA (1) | CA2654957A1 (de) |
| DE (1) | DE102008010598A1 (de) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CA2637371C (en) * | 2007-07-14 | 2012-07-03 | Manroland Ag | Handling device of a printing press |
| DE102013017728B4 (de) * | 2013-10-23 | 2015-05-07 | Beumer Gmbh & Co. Kg | Sauggreifvorrichtung |
| DE102014102791A1 (de) * | 2014-03-03 | 2015-09-03 | Bayerische Motoren Werke Aktiengesellschaft | Vakuumgreifer |
| CN109867140A (zh) * | 2019-04-15 | 2019-06-11 | 常州纺织服装职业技术学院 | 一种钢水取样杯自动送料装置 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2005110754A1 (de) * | 2004-05-10 | 2005-11-24 | Maschinenfabrik Wifag | Druckmaschine mit saugvorrichtung, saugvorrichtung und verfahren zum wechseln eines druckbelags |
| EP1652667A2 (de) * | 2004-10-26 | 2006-05-03 | Maschinenfabrik Wifag | Druckformmanipulator |
| DE202006020088U1 (de) | 2006-11-22 | 2007-12-27 | Man Roland Druckmaschinen Ag | Handhabungsvorrichtung einer Druckmaschine |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62215117A (ja) * | 1986-03-17 | 1987-09-21 | 新技術事業団 | 負圧吸着装置 |
| JP3197019B2 (ja) * | 1991-03-18 | 2001-08-13 | 株式会社ブリヂストン | 帯状部材の吸着方法 |
| DE4116491C1 (de) * | 1991-05-21 | 1992-06-17 | Heidelberger Druckmaschinen Ag, 6900 Heidelberg, De | |
| DE4214047A1 (de) * | 1992-04-29 | 1993-11-04 | Heidelberger Druckmasch Ag | Halteeinrichtung fuer eine zu verschiebende platte |
| AUPN559095A0 (en) * | 1995-09-22 | 1995-10-19 | Cherrington (Australia) Pty Ltd | Pipe protector |
| DE19620997C2 (de) * | 1996-05-24 | 1998-03-26 | Koenig & Bauer Albert Ag | Verfahren und Vorrichtung zum axialen Positionieren einer Druckplatte |
| DE29906611U1 (de) * | 1999-04-14 | 1999-09-02 | J. Schmalz GmbH, 72293 Glatten | Sauggreifer |
| JP4291497B2 (ja) * | 2000-05-11 | 2009-07-08 | 株式会社妙徳 | 吸着パッド |
| DE102006010701B4 (de) * | 2005-03-17 | 2008-09-25 | Daimler Ag | Handhabungseinrichtung zum Transportieren flacher Werkstücke in einer Pressenanlage |
| CA2637371C (en) * | 2007-07-14 | 2012-07-03 | Manroland Ag | Handling device of a printing press |
-
2008
- 2008-02-22 DE DE102008010598A patent/DE102008010598A1/de not_active Withdrawn
-
2009
- 2009-02-16 EP EP09152907A patent/EP2093060A1/de not_active Withdrawn
- 2009-02-19 JP JP2009036570A patent/JP2009196360A/ja active Pending
- 2009-02-20 CA CA002654957A patent/CA2654957A1/en not_active Abandoned
- 2009-02-20 CN CN2009100078876A patent/CN101554795B/zh not_active Expired - Fee Related
- 2009-02-23 US US12/390,548 patent/US20090211478A1/en not_active Abandoned
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2005110754A1 (de) * | 2004-05-10 | 2005-11-24 | Maschinenfabrik Wifag | Druckmaschine mit saugvorrichtung, saugvorrichtung und verfahren zum wechseln eines druckbelags |
| EP1652667A2 (de) * | 2004-10-26 | 2006-05-03 | Maschinenfabrik Wifag | Druckformmanipulator |
| DE202006020088U1 (de) | 2006-11-22 | 2007-12-27 | Man Roland Druckmaschinen Ag | Handhabungsvorrichtung einer Druckmaschine |
Non-Patent Citations (2)
| Title |
|---|
| "Roboterarm für Plattenwechsel in Zeitungsrotationen", DEUTSCHER DRUCKER, no. 17, 31 May 2007 (2007-05-31), Deutschland, pages 20, XP007908649 * |
| DEUTSCHER DRUCKER, 31 May 2007 (2007-05-31) |
Also Published As
| Publication number | Publication date |
|---|---|
| DE102008010598A1 (de) | 2009-08-27 |
| US20090211478A1 (en) | 2009-08-27 |
| CN101554795B (zh) | 2012-03-21 |
| JP2009196360A (ja) | 2009-09-03 |
| CA2654957A1 (en) | 2009-08-22 |
| CN101554795A (zh) | 2009-10-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2017081B1 (de) | Handhabungsvorrichtung einer Druckmaschine | |
| DE202007018706U1 (de) | Druckeinheiten mit mehreren Druckwerken sowie Druckturm | |
| EP2093060A1 (de) | Handhabungsvorrichtung einer Druckmaschine | |
| EP2792487A1 (de) | Rotationssiebdrucksieb, Montagevorrichtung, Beschichtungsvorrichtung, Belichtungsvorrichtung und Waschvorrichtung mit Klemmschnellverschluss | |
| DE10238123A1 (de) | Vorrichtungen zum Montieren einer Druckform auf einem Formzylinder einer Druckmaschine | |
| EP1530515B1 (de) | Verfahren zum wechseln mindestens einer druckform und druckmaschine mit mehreren formzylindern | |
| EP1927474B1 (de) | Druckmachine mit einer Handhabungsvorrichtung | |
| EP1530514B1 (de) | Verfahren zum montieren eines aufzugs auf einem zylinder einer druckmaschine | |
| DE10238177B3 (de) | Vorrichtung zum Andrücken eines Aufzugs an einen Zylinder einer Druckmaschine mit Hilfe von in Umfangsrichtung des Zylinders voneinander beabstandeten ersten und zweiten Wälzelementen | |
| DE102007032941A1 (de) | Handhabungsvorrichtung einer Druckmaschine | |
| DE19941633C2 (de) | Verfahren und Einrichtung zum Einstellen und Wechseln von Saugringen | |
| DE10238125B3 (de) | Druckformmagazin mit mindestens einem Schacht | |
| EP0875378B1 (de) | Klemmeinrichtung | |
| DE102006006331B3 (de) | Vorrichtung zum Befestigen eines Aufzugs auf einem Zylinder | |
| DE102006050568B3 (de) | Vorrichtung zum Andrücken eines Aufzugs an einen Zylinder | |
| DE202023105103U1 (de) | Druckwerk mit verfahrbar angeordneten Druckzylindern | |
| EP1531994B1 (de) | Verfahren und vorrichtung zum abnehmen eines aufzugs von einem zylinder einer druckmaschine | |
| EP1900525A2 (de) | Vorrichtung zum Montieren einer Druckform auf einen Formzylinder einer Druckmaschine | |
| DE102023123902A1 (de) | Druckwerk mit verfahrbar angeordneten Druckzylindern | |
| DE102011084005B4 (de) | Verfahren zum Ausrichten einer Speichervorrichtung und einer zu dieser Speichervorrichtung gehörenden Fördereinrichtung jeweils relativ zu einem in einer Druckeinheit angeordneten Formzylinder | |
| DE202006020087U1 (de) | Handhabungsvorrichtung einer Druckmaschine | |
| DE29615995U1 (de) | Vorrichtung zum Aufziehen flexibler Druckformen | |
| DE10238106A1 (de) | Verfahren und Vorrichtung zum Montieren eines Aufzugs auf einen Zylinder einer Druckmaschine | |
| DE10238107A1 (de) | Verfahren und Vorrichtungen zum Abnehmen eines Aufzugs von einem Zylinder einer Druckmaschine | |
| DE29911599U1 (de) | Vorrichtung zum axialen Verschieben eines Gummituches |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO SE SI SK TR |
|
| AX | Request for extension of the european patent |
Extension state: AL BA RS |
|
| 17P | Request for examination filed |
Effective date: 20100218 |
|
| 17Q | First examination report despatched |
Effective date: 20100318 |
|
| AKX | Designation fees paid |
Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO SE SI SK TR |
|
| 19U | Interruption of proceedings before grant |
Effective date: 20120201 |
|
| 19W | Proceedings resumed before grant after interruption of proceedings |
Effective date: 20140203 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN WITHDRAWN |
|
| 18W | Application withdrawn |
Effective date: 20140311 |