EP2725141A2 - Membre articulé comportant un outil de traitement de parois et véhicule de traitement de parois d'un ouvrage - Google Patents
Membre articulé comportant un outil de traitement de parois et véhicule de traitement de parois d'un ouvrage Download PDFInfo
- Publication number
- EP2725141A2 EP2725141A2 EP13306474.1A EP13306474A EP2725141A2 EP 2725141 A2 EP2725141 A2 EP 2725141A2 EP 13306474 A EP13306474 A EP 13306474A EP 2725141 A2 EP2725141 A2 EP 2725141A2
- Authority
- EP
- European Patent Office
- Prior art keywords
- articulated
- arm
- vehicle
- limb
- pantograph
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






Classifications
-
- E—FIXED CONSTRUCTIONS
- E01—CONSTRUCTION OF ROADS, RAILWAYS, OR BRIDGES
- E01H—STREET CLEANING; CLEANING OF PERMANENT WAYS; CLEANING BEACHES; DISPERSING OR PREVENTING FOG IN GENERAL CLEANING STREET OR RAILWAY FURNITURE OR TUNNEL WALLS
- E01H1/00—Removing undesirable matter from roads or like surfaces, with or without moistening of the surface
- E01H1/005—Mobile installations, particularly for upkeeping in situ road or railway furniture, for instance road barricades, traffic signs; Mobile installations particularly for upkeeping tunnel walls
Definitions
- the present invention relates to an articulated member comprising a wall treatment tool of a structure, in particular a tunnel wall washing device, and a vehicle for treating walls of a structure comprising one or, preferably, many of these articulated members. It has applications in the field of maintenance of road works or other and the manufacture of machinery for this maintenance.
- Wall cleaning machines are known.
- articulated arms carrying at their ends washing means are implemented.
- These arms are of the sliding / telescopic type for a linear displacement and / or pivot type type between their ends for flexion / extension. This results in a large footprint, especially when the arms are returned to their rest position / storage. This congestion has the effect of reducing the carrying capacity of the machines because a significant volume must be occupied by the arms at rest.
- the cantilever and / or the distance between the machine and the worn washing means when the arms are deployed and operational, the vibrations or oscillations of the machine are greatly amplified and instabilities can also occur due to the necessary play of the joints.
- the intrinsic complexity of the arm controls in particular for the arms controlled in flexion / extension, is increased if it is desired to follow the walls correctly when moving the machine. If the orders are handled by a human operator, the latter must pay close and continuous attention to this monitoring and the speed of cleaning must be reduced to take account of the human capacities. In the case of more or less automated commands, the algorithms they use become complex and parasitic phenomena can appear.
- the present invention proposes the use of a pantograph within an articulated limb that can be retracted or deployed and carrying a tool for treating the surface of a wall of a structure and, in particular, carrying a wall washing member for a treatment which is a wash.
- the pantograph is a known model and used in the field of railways for current sensing to simplify the realization of the articulated limb. Thanks to the pantograph, the size of the member in the retracted state is minimal and, in the deployed state, the member is more stable and better controllable. Indeed, the end of the pantograph which is controlled by a single cylinder system (s), moves in a plane, which simplifies the control of the positioning of the tool unlike conventional arm systems, including individually controlled, including the ends of the arms follow complex curves.
- the invention relates to an articulated member comprising a tool for treating walls of a structure, said member being constituted over its length of arms mounted at least in series and articulated together to allow the member to retract or to deploy, said member having, firstly, a proximal end provided with means for mounting it on a vehicle adapted to move along said structure and, secondly, a distal end carrying the tool.
- At least two arms form a pantograph whose folding and unfolding movements are controlled by at least one double-acting cylinder to cause a translation of the tool.
- the articulated limb comprises at least one pantograph-type translational member for moving the end, distal side of said translational member, along a determined translational plane, between a folded position and unfolded positions of said translational member by virtue of one or more double acting cylinders.
- the invention in the context of a member with a pantograph Z, the invention relates to an articulated member comprising a tool for the treatment of walls of a structure, said member being constituted over its length of arms mounted at least in series and articulated between they allow the limb to retract or unfold, said limb having, on the one hand, a proximal end provided with means for mounting it on a vehicle adapted to move along said work and, on the other hand, a at the distal end carrying the tool, at least two of the arms forming a pantograph with two Z-type articulated arms consisting, on the one hand, of a lower main arm and its lower arm respectively, and, on the other hand, of an upper main arm and its upper forearm, the lower main arm and its lower lower arm being articulated to one of their two respective ends to the same support, said Z pantograph comprises at least one double effect jack extended (s) between the support and the lower arm-arm and is configured so that, during its movements of folding and unfolding, its distal end is translated along
- the lower main arm, the lower arm and the upper main arm are perforated metal plates and the upper arm is made of two rods.
- the articulated member has two stages in series of pantographs, the pantographs of the floors being of the same type Z or of different types, at least one of which is Z-type, the others being diamond-shaped types or with arms crossed in scissors.
- the invention also relates to a vehicle for treating the walls of a structure, such as it comprises at least one hinged member according to the invention and at least one tilting support for hinged member (s) and the proximal extremity of the member is attached to the vehicle via said tilting support, the tilting support rotating perpendicular to a tilting axis parallel to the direction of movement of the vehicle and for moving the tool in a scanning plane perpendicular to the direction for moving the vehicle, the same tilting support that can receive one or more articulated members, and in the case where the same tilting support receives several articulated members, said hinged members are fixed on the tilting support in separate angular positions around the axis tipping.
- pantographs 1a ', 1b' and 1c 'of different structures are shown, the structures / principles of which can be taken up for the realization of the articulated pantograph member of the invention.
- the schematized pantograph 1a is of diamond type. It comprises a frame 21 on which are articulated four lower arms 12a, 12b, 12c, 12d, parallel in pairs: 12a parallel to 12b and 12c parallel to 12d, and opposite two by two: 12a opposite 12c and 12b opposite 12d .
- At the upper end of each lower arm is articulated an upper arm corresponding to: for 12a the upper arm 13a, for 12b the upper arm 13b, for 12c the upper arm 13c and for 12d the upper arm 13d.
- the four upper arms 13a, 13b, 13c, 13d are parallel in pairs: 13a parallel to 13b and 13c parallel to 13d, and opposed in pairs: 13a opposite 13c and 13b opposite 13d.
- the upper ends of the four upper arms 13a, 13b, 13c, 13d are hinged to a plate 20.
- Discontinuous lines have been drawn to represent the axes of the joints.
- Reinforcing rods 22 make it possible to keep the arms parallel to each other in the folded (flattened) or unfolded (as shown) position of the pantograph 1a '.
- An actuator (not shown) makes it possible to deploy or fold the pantograph. Thanks to the arrangements and joints between the arms, the plate 20 can move in vertical translation when the pantograph folds or unfolds.
- the schematized pantograph 1b ' is of type Z.
- the pantograph Z 1b' rests on a frame 21 'on which are articulated, on the one hand, a lower arm 12' and, on the other hand, a counter-arm lower or lower connecting rod 15 '.
- An upper arm 13 'and an upper upper arm or upper link 16' are articulated to the lower arm 12 'and the lower arm / lower link 15'.
- a tray 20 ' is attached to the upper end of the pantograph.
- An actuator (not shown) makes it possible to actuate at the frame the arms and forearms / connecting rods to deploy or fold the pantograph. Thanks to the arrangements and joints between the arms and against arms / connecting rods, the plate 20 'can move in vertical translation when the pantograph folds or unfolds.
- the articulated members can be used in other applications than tunnel washing and, for example, wall painting, surface treatments (anti-foam, water-repellent, etc.), or for the analysis of surface (video for example to see the state of the works).
- the tools carried by the articulated members can be of the most various, organs of washing, tools of painting, of stripping, of observation, of measurement ...
- the works, besides the tunnels, can be vaults of bridges, sound walls, building walls ...
- the articulated members may be conveyed by means other than a motor vehicle and, for example, a road trailer, a rail car or a rail car, a barge or a ship...
- the schematized pantograph 1c is scissor type in which the arms intersect at X being articulated to each other at the crossing.
- the pantograph may comprise one or more stages of X-arms, articulated between them between each floor.
- a pair of intersecting arms X, 23a 24a (first element of the pair) and 23b 24b (second element of the pair) are mounted parallel between a support 21 at the bottom and a plate 27 at the top.
- the lower ends of the arms 24a and 24b are fixed hinged to the support 21.
- the upper ends of the arms 23a and 23b are fixed hinged to the plate 27.
- the lower ends of the arms 23a and 23b and the upper ends of the arms 24a and 24b are provided with rolling means to be able to move on the support 21 and under the plate 27.
- a jack 25 makes it possible to move the arms to raise or lower the plate 27.
- a Z-type pantograph is used and, in a simplified embodiment, a pantograph of the type used for current sensing on the electric locomotives and modified for the present application and for which a long time is required. experience is available.
- the metal pantographs and not just tubes were used for the Z pantograph arms.
- the articulated members with washing members are mounted on a truck-type motor vehicle 10 and, more particularly, on a rear chassis of a semitrailer.
- the articulated members with washing members are mounted on a chassis which is removable from the vehicle 10, that is to say that the chassis can be mounted or removed from the vehicle.
- the articulated members 2a-2h are all deployed so that the washing bodies 3 of the rotating roller type (the means for spraying water and / or washing substance are not shown to simplify the figures) can be applied to the wall of the tunnel 11 covering their respective paths so that a given arcuate surface of the wall is washed over the entire arc in a single pass and avoiding leaving unwashed strips in said arc.
- the washing bodies 3 of the rotating roller type the means for spraying water and / or washing substance are not shown to simplify the figures
- the support 4 is a tilting support in arc or triangle 4 common to several articulated members having a general shape disc segment, the tip of the disc segment comprising a bearing rotating about the axis of tilting.
- the articulated members are fixed on the outer edge of the disc segment in offset angular positions, this outer edge having plates for fixing said articulated members and thus having a faceted diamond shape.
- the support 4 in the form of a diamond section is a simple frame whose tip comprises a joint and whose tilting axis 28 is along the length of the vehicle and whose tilting is provided by jacks double effect 7.
- the support 4 is disposed in a cradle 29 fixed between the two edges of which it can rock cradle.
- the support 5 is a simple tilting support 5 for a single articulated member, or even two 2d 2nd members as in the example shown.
- the single support is of linear type and can move over the width of the vehicle.
- the supports are of the type tilting and linear type.
- the pantograph 1b is actuated by one or more double-acting cylinders for folding or unfolding. In the folded position, the arms of the pantographs are brought to meet by the action of double effect cylinders also, conversely, to move them in unfolded positions.
- the retractable arm 9 can switch between a fixed working position in which the contribution of the retractable arm in the height / length of the articulated member is maximum, and a retracted position.
- the retractable arm 9 allows the distal portion of the articulated member and more particularly to its washing member, to retract / fade when it hits an obstacle.
- a passive spring retraction system can be implemented or, in more advanced variants, active with force or shock sensors and cylinders.
- manual control means and / or automated also allow the retraction / erasure of the retractable arm 9 without direct contact with an obstacle but preventively to shock.
- actuating means of the jack type are used.
- the joint joint 8 allows movements of the washing member relative to the retractable arm and, preferably, in a plane perpendicular to the axis of movement of the vehicle, the latter axis being parallel to the main axis of the work, in this example a tunnel.
- the joint may comprise passive restoring means, such as springs, or active, of the jack type.
- the washing member 3 is here rotating brush type with jets (not shown).
- each cylinder or part thereof may be manual, but preferably a part of the control or a control check, each cylinder is automated in such a way that dangerous or excessive controls do not occur. endanger equipment or even personnel.
- force sensors can detect excessive forces or shocks preventing dangerous commands or, better, allowing to retract or at least partially fold the articulated member.
- access to the platform preferably constituted by a removable chassis of the vehicle and carrying the articulated members can be secured by preventing access or by blocking any member control, or even the movement of the vehicle in case of presence human. It is indeed better to avoid that the retraction of a member, see the retraction of an arm does not come to hurt a person present on the platform of the vehicle.
- Figures 4a , 4b and 5 make it possible to better distinguish the articulated members 2f, 2g, 2h and their common rocking support 4 as well as the other organs that are useful for washing and in particular the liquid washing reserve 6.
- Figure 4a and 4b the retractable chassis has been removed from the vehicle and, Figure 4a , the articulated limbs are in working position and, Figure 4b , in the rest position.
- the energy necessary for the operation of this assembly is provided by the motor of the self-propelled vehicle.
- an energy generator is installed on the chassis carrying the articulated members.
- FIGS. 6 to 8 allow to better visualize an articulated member, in this example the 2a, with its washing member 3 brush-type elongate brush at the distal end.
- the articulated limb is retracted and its height is minimal. It is also compactly retracted because the washing member is arranged in such a way that the axis of the roll is substantially parallel to the arms of the articulated member.
- the pantograph 1b is folded and the retractable arm 9 is in its folded position.
- the articulated limb 2a has between its proximal end, at the bottom of the Figure 6 , and its distal end: the pantograph 1b consists of a lower main arm 12 and an upper main arm 13 hinged to the previous one and with their lower arms / rods lower / e 15 and greater / e 16 respective / ves, then a retractable arm 9 hinged to said pantograph, then the articulation joint 8 and finally the washing member 3.
- These arms are actuated by cylinders 14 double effect to retract or deploy the articulated member by acting on the pantograph 1b or on the retractable arm 9.
- the articulated member 2a has encountered an obstacle (not shown) at its washing member 3 and the retractable arm 9 has retracted, rolling back and down the washing member.
- the term "backward" means that the washing member is in a direction opposite to the direction of movement of the washing vehicle so as not to withstand the obstacle encountered during the advance of the vehicle.
- the retraction of the retractable arm is to the rear, in the opposite direction of the movement of the vehicle carrying the articulated member.
- the retraction is active in that when obstacle sensors have detected an obstacle, they control the cylinders 14 of the retractable arm to cause the retraction.
- passive spring retraction means may be used alone or in addition to the active control cylinders.
- the latter can, in addition, control the cylinders 14 of the pantograph 1b to fold the pantograph.
- the lower main arm 12 and its lower arm / connecting rod / e 15 are perforated plates, as the upper main arm 13.
- the counter arm 16 of the upper main arm 13 consists of two rods.
- the operation of this pantograph 1b is similar to that of the pantograph 1b 'presented above.
- the retractable arm 9 is, in turn, articulated along the axis 18 at the distal end of the pantograph 1b.
- automated control means with optical sensors can detect an obstacle , For example a billboard or a fan, before a washing member, or even an arm / arm of an articulated member does not come to hit it.
- These optical means use cameras and allow distance measurements in their common field of vision.
- More conventional obstacle detection control means may be used in addition / redundancy of the above or used alone.
- These means can implement obstacle sensors / distance measurement, preferably ultrasound, contact detection poles ...
- stress sensors can be installed on certain joints to detect shocks.
- control means are of mixed type, that is to say both manual and automated.
- the rise and placement of the washing member of each articulated member is done manually and the obstacle detection is done automatically, an operator can however manually ensure the descent and / or the retraction of the organ washing if he wishes.
- the control means for their automated part are disengageable to go into full manual control if necessary.
- the chassis carrying the articulated members is disposed inside a standardized cargo transport container whose walls are removable in order to release the articulated members so that they can operate.
- the folded articulated members are protected by the container walls put back in place to close it.
Landscapes
- Engineering & Computer Science (AREA)
- Architecture (AREA)
- Civil Engineering (AREA)
- Structural Engineering (AREA)
- Current-Collector Devices For Electrically Propelled Vehicles (AREA)
- Lining And Supports For Tunnels (AREA)
- Cleaning In General (AREA)
Abstract
Description
- La présente invention concerne un membre articulé comportant un outil de traitement de parois d'un ouvrage, en particulier un organe de lavage de parois de tunnel, ainsi qu'un véhicule de traitement de parois d'un ouvrage comportant un ou, de préférence, plusieurs de ces membres articulés. Elle a des applications dans le domaine de l'entretien des ouvrages routiers ou autres et de la fabrication des engins permettant cet entretien.
- On connaît des engins de nettoyage de parois. En général, comme décrit dans les documents
ES 1 025 055 EP 2 159 329 ,GB 1 0380 924 US 5 280 662 , des bras articulés portant à leurs extrémités des moyens de lavage sont mis en oeuvre. Ces bras sont de type coulissant/télescopique pour un déplacement linéaire et/ou de type articulation en pivot entre leurs extrémités pour flexion/extension. Il en résulte un encombrement important, en particulier lorsque les bras sont ramenés à leur position de repos/stockage. Cet encombrement a pour conséquence de réduire les capacités d'emport des engins du fait qu'un volume non négligeable doit être occupé par les bras au repos. - On connaît également par les documents
FR2 584 747 WO2012/059868 etDE 20 2011 001 292 U des dispositifs de nettoyage de voutes de tunnels, à bras articulés, mais ces dispositifs ne mettent pas en oeuvre un pantographe en Z dont l'extrémité se déplace dans un plan. En particulier, dansFR2 584 747 WO2012/059868 , le mouvement de l'extrémité des bras (Figure 5 ) n'est pas dans un plan. Enfin, dansDE 20 2011 001 292 U l'agencement des bras s'apparente à celui d'une excavatrice classique. Quant à lui, le documentDE44 23 376 montre un dispositif de pantographe à entrecroisement de bras en ciseaux. - En outre, du fait du porte-à-faux et/ou de la distance entre l'engin et les moyens de lavage portés, lorsque les bras sont déployés et opérationnels, les trépidations ou oscillations de l'engin sont fortement amplifiées et des instabilités peuvent également se produire du fait du jeu nécessaire des articulations. La complexité intrinsèque des commandes de bras, en particulier pour les bras commandés en flexion/extension, en est augmentée si l'on souhaite un suivi correct des parois lors du déplacement de l'engin. Si les commandes sont gérées par un opérateur humain, celui-ci doit porter une attention poussée et continue à ce suivi et la vitesse de nettoyage doit être réduite pour tenir compte des capacités humaines. Dans le cas de commandes plus ou moins automatisées, les algorithmes qu'elles utilisent deviennent complexes et des phénomènes parasites peuvent apparaître.
- Il en résulte qu'en général, les performances en termes de qualité et de vitesse de nettoyage sont médiocres et peuvent même être insuffisantes dans le cas de certaines formes de voutes de tunnel.
- La présente invention propose l'utilisation d'un pantographe au sein d'un membre articulé pouvant se rétracter ou se déployer et portant un outil de traitement de la surface d'une paroi d'un ouvrage et, en particulier, portant un organe de lavage de parois pour un traitement qui est un lavage. Dans une modalité de réalisation particulière, le pantographe est un modèle connu et utilisé dans le domaine des chemins de fer pour le captage de courant afin de simplifier la réalisation du membre articulé. Grâce au pantographe, l'encombrement du membre à l'état rétracté est minimal et, à l'état déployé, le membre est plus stable et mieux contrôlable. En effet, l'extrémité du pantographe qui est commandé par un système unique de vérin(s), se déplace dans un plan, ce qui simplifie le contrôle du positionnement de l'outil contrairement aux systèmes de bras classiques, notamment commandés individuellement, dont les extrémités des bras suivent des courbes complexes.
- Ainsi, l'invention concerne un membre articulé comportant un outil pour le traitement de parois d'un ouvrage, ledit membre étant constitué sur sa longueur de bras montés au moins en série et articulés entre eux pour permettre au membre de se rétracter ou de se déployer, ledit membre ayant, d'une part, une extrémité proximale pourvue de moyens pour son montage sur un véhicule adapté à se déplacer le long dudit ouvrage et, d'autre part, une extrémité distale portant l'outil.
- Selon l'invention, deux au moins des bras forment un pantographe dont les mouvements de repliement et de dépliement sont commandés par au moins un vérin double effet pour provoquer une translation de l'outil.
- Ainsi, le membre articulé comporte au moins un organe translatif de type pantographe permettant de déplacer l'extrémité, côté distal dudit organe translatif, le long d'un plan de translation déterminé, entre une position repliée et des positions dépliées dudit organe translatif grâce à un ou plusieurs vérins double effet.
- Dans divers modes de mise en oeuvre de l'invention de procédé, les moyens suivants pouvant être utilisés seuls ou selon toutes les combinaisons techniquement possibles, sont employés :
- le pantographe est à quatre bras articulés de type en losange,
- le pantographe est à deux bras articulés de type en Z,
- le pantographe est à entrecroisement de bras en ciseaux,
- le pantographe à entrecroisement de bras en ciseaux est de type à simple étage ou à double étage,
- dans le cas de plusieurs pantographes en série, tous les pantographes ont le même plan de translation déterminé,
- dans le cas de plusieurs pantographes en série, les plans de translation déterminés des pantographes sont dans des plans décalés et parallèles,
- le pantographe est choisi parmi les pantographes à quatre bras articulés de type en losange, à deux bras articulés de type en Z ou à entrecroisement de bras en ciseaux,
- le membre articulé comporte un étage de pantographe,
- le membre articulé comporte deux étages en série de pantographes, les pantographes des étages étant du même type en losange ou en Z ou à bras en ciseaux, ou étant de types différents,
- le membre articulé comporte au moins deux étages en série de pantographes, les pantographes des étages étant du même type en losange ou en Z ou à bras en ciseaux, ou étant de types différents,
- le membre articulé comporte en outre du/des pantographe(s), un dispositif à bras télescopique monté en série le long dudit membre, le dispositif à bras télescopique étant actionné par un ou plusieurs vérins double effet,
- dans le cas où le membre articulé comporte plusieurs pantographes en série, le dispositif à bras télescopique en série peut être installé d'un côté ou de l'autre des pantographes en série ou entre lesdits pantographes,
- le membre articulé comporte en outre du/des pantographe(s), un bras escamotable monté en série sur la longueur dudit membre, ledit bras escamotable pouvant basculer entre une position de travail fixe dans laquelle la contribution du bras escamotable dans la hauteur (plus généralement : la longueur) du membre articulé est maximale, et une position escamotée, la contribution du bras escamotable dans la hauteur du membre articulé étant réduite dans ladite position escamotée,
- de préférence, en position de travail, le bras escamotable est sensiblement dans le plan de translation,
- le bras escamotable s'escamote en cas de choc sur l'outil fixé à l'extrémité distale du membre articulé,
- le bras escamotable comporte en outre une position repliée dans laquelle la contribution du bras escamotable dans la hauteur du membre articulé est minimale,
- le bras escamotable comporte plusieurs positions d'escamotage,
- les positions repliée et escamotée du bras escamotable sont les mêmes, leurs contributions dans la hauteur du membre articulé étant minimale,
- le bras escamotable est actionné par un ou plusieurs vérins double effet,
- le bras escamotable est en outre un bras télescopique,
- le bras escamotable est essentiellement droit,
- l'escamotage est obtenu par action du ou des vérins dudit bras escamotable,
- l'escamotage est obtenu par action d'une force dont la source est extérieure au membre articulé et dont la valeur est supérieure à un seuil déterminé, notamment force suffisante sur l'outil fixé à l'extrémité distale dudit membre et créée par un obstacle,
- le bras escamotable est disposé entre l'outil fixé à l'extrémité distale du membre articulé et le/les pantographe(s),
- l'outil est fixé à l'extrémité distale du membre articulé par l'intermédiaire d'une articulation de jonction,
- l'outil est fixé à l'extrémité distale du membre articulé par l'intermédiaire d'une articulation de jonction de préférence pour pivoter autour d'un axe de pivotement sensiblement perpendiculaire aux axes d'articulation des bras du pantographe,
- l'articulation de jonction est une articulation de rotation autour d'un axe,
- l'articulation de jonction est une articulation de rotation dans un plan,
- l'articulation de jonction est une articulation de rotation dans un espace à trois dimensions,
- l'articulation de jonction comporte des moyens de stabilisation en orientation ramenant l'articulation vers une position moyenne lorsqu'une force dont la source est extérieure au membre articulé et l'ayant déplacée cesse d'exercer son effet,
- les moyens de stabilisation sont des amortisseurs,
- les moyens de stabilisation sont des ressorts,
- l'articulation de jonction comporte des moyens de commande d'orientation,
- les moyens de commande d'orientation de l'articulation de jonction sont un ou plusieurs vérins double effets ou tilts,
- le membre articulé comporte dans l'ordre, entre son extrémité proximale et son extrémité distale, un pantographe à deux bras articulés de type en Z et un bras escamotable, l'outil étant fixé à l'extrémité distale du bras escamotable par l'intermédiaire d'une articulation de jonction et le pantographe est replié ou dépliée grâce à au moins un vérin double effet, le bras escamotable est placé en position de travail ou en position repliée grâce à au moins un vérin double effet et l'outil est orienté grâce à des moyens de commande d'orientation à vérins,
- les vérins sont des vérins électromécaniques,
- les vérins sont des vérins pneumatiques,
- les vérins sont des vérins hydrauliques ou tilts,
- le membre articulé comporte en outre un support basculant fixé à l'extrémité proximale des bras dudit membre, en série avec eux, ledit support basculant permettant de fixer le membre articulé sur le véhicule, le support basculant tournant dans un plan perpendiculaire à un axe de basculement fixé sur le véhicule,
- l'axe de basculement est parallèle à la longueur du véhicule et donc à la direction de déplacement du véhicule,
- le support basculant a une forme générale en segment de disque, la pointe du segment de disque comportant un palier tournant autour de l'axe de basculement, le/les membres articulés étant fixés sur le bord externe du segment de disque et, dans le cas de plusieurs membres articulés, dans des positions angulaires décalées,
- le segment de disque est étendu selon un angle compris entre 15° et 150°,
- le bord externe du segment de disque comporte des plats destinés à la fixation des membres articulés,
- le segment de disque est ajouré,
- le support basculant a une forme générale en triangle, la pointe inférieure du triangle comportant un palier tournant autour de l'axe de basculement, le/les membres articulés étant fixés sur le bord externe du triangle opposé à la pointe inférieure et, dans le cas de plusieurs membres articulés, dans des positions angulaires décalées le long du bord externe,
- l'angle du triangle côté pointe inférieure est compris entre 15° et 150°,
- le plan de translation déterminé du pantographe est perpendiculaire à l'axe de basculement,
- le plan de translation déterminé du pantographe porte l'axe de basculement,
- le plan de translation déterminé du pantographe est parallèle à l'axe de basculement
- l'extrémité proximale des bras en série est fixée d'une manière rigide sur le support basculant,
- le membre articulé comporte en outre sur au moins une partie de sa hauteur des bras en parallèles, notamment des pantographes montés en parallèles,
- les pantographes en parallèles suivent des mouvements parallèles lors de leurs déplacements entre la position repliée et les positions dépliées, afin de garder une direction de déplacement de l'outil dans un même plan,
- les pantographes en parallèles suivent des mouvements différents lors de leurs déplacements entre la position repliée et les positions dépliées, afin de faire basculer le plan de déplacement de l'outil,
- l'outil est un organe de lavage,
- l'outil est un organe de traitement de surface,
- l'outil est un organe d'élagage,
- l'outil est un organe de peinture,
- l'outil est un organe d'analyse et/ou mesure de surface,
- l'outil est un organe de lavage et le membre articulé est adapté à un traitement de parois qui est un lavage de parois d'un ouvrage qui est un tunnel,
- l'organe de lavage comporte au moins un rouleau brosse rotatif,
- l'organe de lavage comporte au moins un disque de brossage rotatif,
- l'organe de lavage comporte au moins une rampe d'arrosage.
- Dans le cadre d'un membre avec un pantographe en Z, l'invention concerne un membre articulé comportant un outil pour le traitement de parois d'un ouvrage, ledit membre étant constitué sur sa longueur de bras montés au moins en série et articulés entre eux pour permettre au membre de se rétracter ou de se déployer, ledit membre ayant, d'une part, une extrémité proximale pourvue de moyens pour son montage sur un véhicule adapté à se déplacer le long dudit ouvrage et, d'autre part, une extrémité distale portant l'outil, deux au moins des bras formant un pantographe à deux bras articulés de type en Z constitués, respectivement, d'une part, d'un bras principal inférieur et de son contre-bras inférieur et, d'autre part, d'un bras principal supérieur et de son contre-bras supérieur, le bras principal inférieur et de son contre-bras inférieur étant articulés à une de leurs deux extrémités respectives à un même support, ledit pantographe en Z comporte au moins un vérin double effet étendu(s) entre le support et le contre-bras inférieur et il est configuré afin que, lors de ses mouvements de repliement et de dépliement, son extrémité distale se translate le long d'un plan de translation déterminé, lesdits mouvements de repliement et de dépliement dudit pantographe en Z étant commandés par ledit au moins un vérin double effet.
- Dans une modalité de réalisation particulière, le bras principal inférieur, le contre-bras inférieur et le bras principal supérieur sont des plaques métalliques ajourées et le contre-bras supérieur est constitué de deux tiges. Dans des variantes, le membre articulé comporte deux étages en série de pantographes, les pantographes des étages étant de même type en Z ou étant de types différents dont au moins un étant de type en Z, le/les autres étant de types en losange ou à bras se croisant en ciseaux.
- L'invention concerne également un véhicule de traitement de parois d'un ouvrage, tel qu'il comporte au moins un membre articulé selon l'invention et au moins un support basculant de fixation de membre(s) articulé(s) et l'extrémité proximale du membre est fixée au véhicule par l'intermédiaire dudit support basculant, le support basculant tournant perpendiculairement à un axe de basculement parallèle à la direction de déplacement du véhicule et permettant de déplacer l'outil dans un plan de balayage perpendiculaire à la direction de déplacement du véhicule, un même support basculant pouvant recevoir un ou plusieurs membres articulés, et dans le cas où un même support basculant reçoit plusieurs membres articulés, lesdits membres articulés sont fixés sur le support basculant en des positions angulaires distinctes autour de l'axe de basculement.
- Dans des variantes de réalisation du véhicule :
- le véhicule est un véhicule routier, ferroviaire ou fluvial,
- le véhicule est automobile,
- le véhicule est automoteur,
- le véhicule comporte une source d'énergie propre/autonome,
- l'outil est un organe de lavage,
- l'ouvrage est un tunnel,
- l'extrémité proximale du membre articulé est fixée d'une manière rigide sur le support basculant,
- le/les membres articulés sont fixés au bâti du véhicule directement ou par l'intermédiaire d'un/de supports basculants,
- le/les membres articulés, directement ou par l'intermédiaire d'un/de supports basculants, sont fixés au véhicule par l'intermédiaire d'un châssis escamotable pouvant être monté ou démonté du véhicule,
- le véhicule est une remorque,
- le véhicule est un engin automoteur,
- le véhicule comporte un châssis escamotable pouvant être monté ou démonté du véhicule et le/les membres articulés, directement ou par l'intermédiaire d'un/de supports basculants, sont fixés audit châssis escamotable afin de permettre une autre utilisation audit véhicule lorsque ledit châssis avec ses membres articulés est démonté du véhicule,
- le véhicule ou le châssis comporte en outre au moins une citerne de réserve de fluide(s) pour le lavage,
- le véhicule comporte en outre des moyens de contrôle manuels de positionnement des outils des membres articulés,
- le véhicule comporte en outre des moyens de contrôle mixtes manuels et automatisés de positionnement des outils des membres articulés,
- le véhicule comporte en outre des moyens de contrôle automatisés de positionnement des outils des membres articulés,
- les moyens de contrôle manuels sont actionnables à partir d'une cabine de conducteur du véhicule,
- les moyens de contrôle manuels sont actionnables à partir d'une cabine d'opérateur de lavage,
- les moyens de contrôle manuels sont actionnables à partir d'un pupitre portable par un opérateur,
- le pupitre portable est relié aux moyens de contrôle manuels par une liaison filaire,
- le pupitre portable est relié aux moyens de contrôle manuels par une liaison sans fil,
- les moyens de contrôle de positionnement comportent des capteurs de position,
- les capteurs de position sont des capteurs à contact et/ou des capteurs à distance, notamment optiques ou à ultrasons pour ces derniers,
- les moyens de contrôle de positionnement comportent des capteurs de force,
- dans le cas d'un véhicule à châssis escamotable, au moins une partie des moyens de contrôle est placée sur le châssis.
- La présente invention va maintenant être exemplifiée sans pour autant en être limitée avec la description qui suit en relation avec les figures suivantes:
- les
Figures 1a, 1b et 1c qui représentent des exemples schématiques de pantographes utilisables dans un membre articulé de l'invention, respectivement des pantographes de types en losange, en Z et en ciseaux, - la
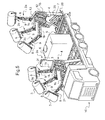
Figure 2 qui représente une vue de l'arrière d'un véhicule automobile routier, portant des membres articulés avec leurs organes de lavage, déployés, en position de lavage d'une paroi d'un ouvrage, - la
Figure 3 qui représente une vue de l'arrière du véhicule de laFigure 2 portant des membres articulés avec leurs organes de lavage, ceux-ci étant cette fois rétractés en position de stockage, au repos dans le gabarit général dudit véhicule, - les
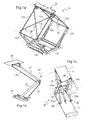
Figures 4a et4b qui représentent des vues en perspective, latérales, d'un châssis escamotable démonté d'un véhicule et portant des membres articulés avec leurs organes de lavage, respectivement déployés en position de lavage et rétractés en position de stockage, au repos, - la
Figure 5 qui représente une vue en perspective du véhicule de laFigure 2 portant des membres articulés avec leurs organes de lavage, déployés, en position de lavage, - la
Figure 6 , qui représente une vue en perspective d'un membre articulé avec son organe de lavage, en position rétractée, - la
Figure 7 , qui représente une vue en perspective d'un membre articulé avec son organe de lavage, en position déployée, et - la
Figure 8 , qui représente une vue en perspective d'un membre articulé avec son organe de lavage, en position déployée mais avec son bras escamotable partiellement escamoté. - Sur les
Figures 1a, 1b, 1c , on a représenté trois exemples schématiques de pantographes 1a', 1b' et 1c' de structures différentes dont les structures/principes peuvent être repris pour la réalisation du membre articulé à pantographe de l'invention. - Sur la
Figure 1a , le pantographe schématisé 1a' est de type en losange. Il comporte un bâti 21 sur lequel sont articulés quatre bras inférieurs 12a, 12b, 12c, 12d, parallèles deux à deux : 12a parallèle à 12b et 12c parallèle à 12d, et opposés deux à deux : 12a opposé à 12c et 12b opposé à 12d. A l'extrémité supérieure de chaque bras inférieur est articulé un bras supérieur correspondant, soit : pour 12a le bras supérieur 13a, pour 12b le bras supérieur 13b, pour 12c le bras supérieur 13c et pour 12d le bras supérieur 13d. Les quatre bras supérieurs 13a, 13b, 13c, 13d sont parallèles deux à deux : 13a parallèle à 13b et 13c parallèle à 13d, et opposés deux à deux : 13a opposé à 13c et 13b opposé à 13d. Les extrémités supérieures des quatre bras supérieurs 13a, 13b, 13c, 13d sont articulés à un plateau 20. Des lignes discontinues ont été dessinées pour représenter les axes des articulations. Des tiges de renfort 22 permettent de maintenir les bras parallèles entre eux aussi bien en position repliée (aplatie) que dépliée (comme représenté) du pantographe 1a'. Un actionneur (non représenté) permet de déployer ou replier le pantographe. Grâce aux dispositions et articulations entre les bras, le plateau 20 peut se déplacer en translation verticale lorsque le pantographe se replie ou se déplie. - Sur la
Figure 1b , le pantographe schématisé 1b' est de type en Z. Le pantographe en Z 1b' repose sur un bâti 21' sur lequel sont articulés, d'une part, un bras inférieur 12' et, d'autre part, un contre-bras inférieur ou bielle inférieure 15'. Un bras supérieur 13' et un contre-bras supérieur ou bielle supérieure 16' sont articulés aux bras inférieur 12' et au contre-bras inférieur/bielle inférieure 15'. Un plateau 20' est fixé à l'extrémité supérieure du pantographe. Un actionneur (non représenté) permet d'actionner au niveau du bâti les bras et contre-bras/bielles pour déployer ou replier le pantographe. Grâce aux dispositions et articulations entre les bras et contre-bras/bielles, le plateau 20' peut se déplacer en translation verticale lorsque le pantographe se replie ou se déplie. - Dans l'application d'un pantographe au membre articulé de la présente invention, décrite en détail dans la suite et en relation avec les
Figures 2 et suivantes, c'est un pantographe de ce type, en Z, qui a été mis en oeuvre. En conséquence, les références numériques concernant le pantographe, les bras et contre-bras/bielles du pantographe desdites Figures seront les mêmes, au prime d'indice près, que celles de laFigure 1b . En outre, cette application concerne le lavage de parois d'un tunnel routier et le véhicule porteur des membres articulés est ici un véhicule automobile de type camion. Toutefois, les membres articulés peuvent être mis en oeuvre dans d'autres applications que le lavage de tunnel et, par exemple, la peinture de parois, des traitements de surface (anti mousse, hydrofuge...), ou pour l'analyse de surface (vidéo par exemple pour voir l'état des ouvrages). Ainsi, les outils portés par les membres articulés peuvent être des plus divers, organes de lavage, outils de peinture, de décapage, d'observation, de mesure... Les ouvrages, outre les tunnels, peuvent être des voutes de ponts, des murs anti-bruit, des murs de bâtiment... De même, les membres articulés peuvent être véhiculés par d'autres moyens qu'un véhicule automobile et, par exemple, une remorque routière, un wagon ferroviaire ou une draisine, une péniche ou un navire... - Sur la
Figure 1c , le pantographe schématisé 1c' est de type en ciseaux dans lequel les bras se croisent en X en étant articulés entre eux au niveau du croisement. Le pantographe peut comporter un ou plusieurs étages de bras en X, articulés entre eux entre chaque étage. Sur laFigure 1c , un seul étage est mis en oeuvre. Une paire de bras se croisant en X, 23a 24a (premier élément de la paire) et 23b 24b (second élément de la paire) sont montés parallèlement entre un support 21 en bas et un plateau 27 en haut. Les extrémités inférieures des bras 24a et 24b sont fixées articulées au support 21. Les extrémités supérieures des bras 23a et 23b sont fixées articulées au plateau 27. Les extrémités inférieures des bras 23a et 23b et les extrémités supérieures des bras 24a et 24b sont munies de moyens de roulement pour pouvoir se déplacer sur le support 21 et sous le plateau 27. Un vérin 25 permet de déplacer les bras pour faire monter ou descendre le plateau 27. - De préférence, pour la présente application, on utilise un pantographe de type en Z et, dans une modalité de réalisation simplifiée, un pantographe de type utilisé pour le captage de courant sur les locomotives électriques et modifié pour la présente application et pour lesquels une longue expérience est disponible. Toutefois, dans l'exemple de réalisation représenté sur les figures, et afin d'obtenir une résistance mécanique améliorée et une plus grande stabilité, on a mis en oeuvre pour les bras du pantographe en Z des plaques métalliques et pas seulement des tubes.
- Dans l'exemple représenté, les membres articulés à organes de lavage sont montés sur un véhicule automobile de type camion 10 et, plus particulièrement, sur un châssis arrière d'un semi-remorque. Dans cet exemple, les membres articulés à organes de lavage sont montés sur un châssis qui est amovible du véhicule 10, c'est-à-dire que le châssis peut être monté ou démonté du véhicule.
- Sur la
Figure 2 , les membres articulés 2a-2h sont tous déployés afin que les organes de lavage 3 de type rouleau rotatif (les moyens de pulvérisation d'eau et/ou de substance de lavage ne sont pas représentés pour simplifier les figures) puissent s'appliquer sur la paroi du tunnel 11 en recouvrement de leurs trajectoires respectives afin qu'une surface déterminée en arc de la paroi soit lavée sur tout cet arc en un seul passage et en évitant de laisser des bandes non lavées dans ledit arc. - Pour chaque membre articulé 2a-2h, on trouve dans l'ordre entre le véhicule, côté de l'extrémité proximale dudit membre, et l'organe de lavage, côté de l'extrémité distale dudit membre :
- un support 4 ou 5 permettant de fixer le membre articulé sur le véhicule,
- un élément translatif qui est un pantographe à deux bras articulés en Z 1b,
- un bras escamotable 9,
- une articulation de jonction 8, et
- l'organe de lavage 3.
- Le support 4 est un support basculant en arc ou triangle 4 commun à plusieurs membres articulés ayant une forme générale en segment de disque, la pointe du segment de disque comportant un palier tournant autour de l'axe de basculement. Les membres articulés sont fixés sur le bord externe du segment de disque dans des positions angulaires décalées, ce bord externe comportant des plats destinés à la fixation desdits membres articulés et présentant donc une forme en diamant à facettes.
- Dans le mode de réalisation représenté, le support 4 en forme de section de diamant, est un simple cadre dont la pointe comporte une articulation et dont l'axe de basculement 28 est sur la longueur du véhicule et dont le basculement est assuré par des vérins double effet 7. Le support 4 est disposé dans un berceau 29 fixe entre les deux bords duquel berceau il peut basculer.
- Le support 5 est un support basculant simple 5 pour un seul membre articulé, voire deux membres 2d 2e comme dans l'exemple représenté.
- Dans une variante non représentée, le support simple est de type linéaire et peut se déplacer sur la largeur du véhicule. Dans d'autres variantes non représentées, le/les supports sont de type mixte basculants et linéaire.
- Ces supports sont actionnés par des vérins doubles effets et permettent de déplacer les membres articulés dans des positions rétractées de stockage ou déployées fonctionnelles que l'on comprend mieux en comparant les
Figures 2 à 5 . - Le pantographe 1b est actionné par un ou plusieurs vérins double effet permettant de le replier ou de le déplier. En position repliée, les bras des pantographes sont amenés à se rejoindre grâce à l'action de vérins double effets permettant aussi, inversement, de les faire passer dans des positions dépliées.
- Le bras escamotable 9 peut basculer entre une position de travail fixe dans laquelle la contribution du bras escamotable dans la hauteur/longueur du membre articulé est maximale, et une position escamotée. Le bras escamotable 9 permet à la partie distale du membre articulé et plus particulièrement à son organe de lavage, de s'escamoter/s'effacer lorsque celui-ci heurte un obstacle. Un système d'escamotage passif à ressort peut être mis en oeuvre ou, dans des variantes plus évoluées, actifs avec des capteurs de force ou choc et des vérins. Dans une variante, des moyens de commande manuels et/ou automatisés permettent également l'escamotage/effacement du bras escamotable 9 sans contact direct avec un obstacle mais préventivement à un choc. A cette fin, des moyens d'actionnement de type vérins sont mis en oeuvre.
- L'articulation de jonction 8, autorise des mouvements de l'organe de lavage par rapport au bras escamotable et, de préférence, dans un plan perpendiculaire à l'axe de déplacement du véhicule, ce dernier axe étant parallèle à l'axe principal de l'ouvrage, dans cet exemple un tunnel. L'articulation peut comporter des moyens de rappel à une position de repos passifs, de type ressorts, ou actifs, de type vérins.
- L'organe de lavage 3 est ici de type brosse rotative avec jets (non représentés).
- La commande générale de chaque vérin ou d'une partie de ceux-ci peut être manuelle, mais, de préférence, une partie de la commande ou une vérification de commande, de chaque vérin est automatisée de telle manière que des commandes dangereuses ou excessives ne puissent mettre en danger l'équipement, voire le personnel. En particulier, des capteurs de force peuvent détecter des efforts excessifs ou chocs empêchant des commandes dangereuses ou, mieux, permettant d'escamoter ou replier au moins en partie le membre articulé. De même, l'accès à la plateforme constituée de préférence par un châssis amovible du véhicule et portant les membres articulés, peut être sécurisé en en empêchant l'accès ou en bloquant toute commande de membre, voire le mouvement du véhicule en cas de présence humaine. Il est en effet préférable d'éviter que la rétractation d'un membre, voir l'escamotage d'un bras ne vienne blesser une personne présente sur la plateforme du véhicule.
- Sur la
Figure 2 , le véhicule ayant été placé en mode de lavage, les membres articulés ont été déployés et le support basculant 4 commun aux membres articulés 2a, 2b et 2c a été basculé vers le haut. Par contre, le support basculant 5 a lui été basculé vers le bas. - Sur la
Figure 3 , le véhicule ayant été placé en mode de stockage/transport des membres articulés, les membres ont été rétractés et le support basculant 4 commun aux membres articulés 2a, 2b et 2c a été basculé vers le bas. Par contre, le support basculant 5 a lui été basculé vers le haut. Les membres articulés 2f, 2g, 2h rétractés, plus en avant sur le véhicule, ne sont pas visibles sur laFigure 3 car masqués par la réserve liquide de lavage 6. - Les
Figures 4a ,4b et5 permettent de mieux distinguer les membres articulés 2f, 2g, 2h et leur support basculant 4 commun ainsi que les autres organes utiles au lavage et en particulier la réserve liquide de lavage 6. Sur lesFigure 4a et4b , le châssis escamotable a été démonté du véhicule et,Figure 4a , les membres articulés sont en position de travail et,Figure 4b , en position de repos. - De préférence, l'énergie nécessaire au fonctionnement de cet ensemble est fournie par le moteur du véhicule automoteur. Dans une variante, un générateur d'énergie est installé sur le châssis portant les membres articulés.
- Les
Figures 6 à 8 permettent de mieux visualiser un membre articulé, dans cet exemple le 2a, avec son organe de lavage 3 de type rouleau brosse allongé à l'extrémité distale. - Sur la
Figure 6 , le membre articulé est rétracté et sa hauteur est minimale. Il est également rétracté d'une manière compacte car l'organe de lavage est disposé de telle manière que l'axe du rouleau est sensiblement parallèle aux bras du membre articulé. Le pantographe 1b est replié et le bras escamotable 9 est dans sa position repliée. - Le membre articulé 2a comporte entre son extrémité proximale, en bas de la
Figure 6 , et son extrémité distale : le pantographe 1b constitué d'un bras principal inférieur 12 et d'un bras principal supérieur 13 articulé au précédent et avec leurs contre-bras/bielles inférieur/e 15 et supérieur/e 16 respectifs/ves, puis un bras escamotable 9 articulé audit pantographe, puis l'articulation de jonction 8 et, enfin, l'organe de lavage 3. Ces bras sont actionnés par des vérins 14 à double effet permettant de rétracter ou déployer le membre articulé en agissant sur le pantographe 1b ou sur le bras escamotable 9. - Sur la
Figure 7 , le membre articulé 2a est complètement déployé et l'organe de lavage, qui a été basculé autour de son articulation de jonction 8, est à une hauteur maximale. Le pantographe 1b a été déplié et le bras escamotable 9 est dans sa position de travail. Par actionnement des vérins 14 du pantographe 1b, il est possible, par translation, de faire monter plus ou moins en fonction des besoins, l'organe de lavage qui est au bout du bras escamotable 9. - Sur la
Figure 8 , le membre articulé 2a a rencontré un obstacle (non représenté) au niveau de son organe de lavage 3 et le bras escamotable 9 s'est escamoté, faisant reculer et descendre l'organe de lavage. Le terme « reculer » signifie que l'organe de lavage va dans un sens opposé au sens de déplacement du véhicule de lavage afin de ne pas résister à l'obstacle rencontré lors de l'avance du véhicule. Ainsi, dans cette modalité de réalisation, l'escamotage du bras escamotable se fait vers l'arrière, dans le sens opposé du déplacement du véhicule portant le membre articulé. De même, dans cet exemple, l'escamotage est actif en ce sens que lorsque des capteurs d'obstacle ont détecté un obstacle, ils commandent les vérins 14 du bras escamotable pour provoquer l'escamotage. Dans des variantes, des moyens d'escamotage passifs à ressorts peuvent être utilisés seuls ou en complément des vérins à commande active. Enfin, dans le cas d'une commande active par les capteurs d'obstacle, ces derniers peuvent, en plus, commander les vérins 14 du pantographe 1b pour replier le pantographe. - Afin de mieux faire comprendre le fonctionnement du pantographe 1b, on a représenté sur la
Figure 8 les axes d'articulation 17 des deux bras principaux 12, 13 et des contre-bras/bielles, inférieur/e 15 et supérieur/e 16 de celui-ci. Dans cet exemple de réalisation, le bras principal inférieur 12 et son contre-bras/bielle inférieur/e 15 sont des plaques ajourées, tout comme le bras principal supérieur 13. Par contre, le contre-bras 16 du bras principal supérieur 13 est constitué de deux tiges. Le fonctionnement de ce pantographe 1b est similaire à celui du pantographe 1b' présenté précédemment. Le bras escamotable 9 est, quant à lui, articulé selon l'axe 18 à l'extrémité distale du pantographe 1b. Ces axes d'articulation 17 et 18 restent parallèles entre eux lorsque le membre articulé est rétracté ou déployé. L'organe de lavage, grâce à son articulation de jonction 8 peut pivoter dans un plan parallèle à ces axes d'articulation 17 et 18. L'axe de pivotement 19 de l'articulation de jonction 8 est perpendiculaire aux axes d'articulation 17 et 18 - Dans une modalité particulièrement évoluée de contrôle du fonctionnement des membres articulés et des organes de lavage pendant les opérations de lavage au cours desquelles ceux-ci se déplacent le long de l'ouvrage, des moyens de contrôle automatisés à capteurs optiques permettent de détecter un obstacle, par exemple un panneau d'affichage ou un ventilateur, avant qu'un organe de lavage, voire même un/des bras d'un membre articulé, ne vienne le heurter. Ces moyens optiques mettent en oeuvre des caméras et permettent des mesures de distance dans leur champ de vision commun. Des moyens de contrôle pour détection d'obstacles plus classiques peuvent être utilisés en complément/redondance des précédents ou être utilisés seuls. Ces moyens peuvent mettre en oeuvre des capteurs d'obstacle/mesure de distance, de préférence par ultrasons, des perches à détection de contact... Enfin, en dernière ligne de défense contre les obstacles, des capteurs de contrainte peuvent être installés sur certaines des articulations pour détecter des chocs. En cas de détection d'obstacle ou de choc, certains des vérins du membre articulé sont actionnés afin de faire redescendre et/ou escamoter l'organe de lavage. On rappelle à ce sujet qu'il existe également une ligne de défense mécanique contre les obstacles grâce au bras escamotable installé le long du membre articulé et qui permet l'effacement dudit membre en cas de choc mécanique de l'organe de lavage sur un obstacle.
- De préférence, les moyens de contrôle sont de type mixte, c'est-à-dire à la fois manuels et automatisés. Par exemple, la montée et mise en place de l'organe de lavage de chaque membre articulé se fait manuellement et la détection d'obstacle se fait automatiquement, un opérateur pouvant toutefois assurer manuellement la redescente et/ou l'escamotage de l'organe de lavage s'il le souhaite. En outre, de préférence, les moyens de contrôle pour leur partie automatisée sont débrayable pour passer en contrôle manuel total si nécessaire.
- Dans une variante, le châssis portant les membres articulés est disposé à l'intérieur d'un conteneur normalisé de transport de fret dont les parois sont amovibles afin de libérer les membres articulés pour qu'ils puissent opérer. Lors du transport ou du stockage, les membres articulés repliés sont protégés par les parois du conteneur remises en place pour le fermer.
Claims (15)
- Membre articulé (2a-2h) comportant un outil (3) pour le traitement de parois d'un ouvrage (11), ledit membre étant constitué sur sa longueur de bras (9, 12, 13) montés au moins en série et articulés entre eux pour permettre au membre de se rétracter ou de se déployer, ledit membre ayant, d'une part, une extrémité proximale pourvue de moyens pour son montage sur un véhicule (10) adapté à se déplacer le long dudit ouvrage et, d'autre part, une extrémité distale portant l'outil,
caractérisé en ce que deux au moins des bras (12, 13) forment un pantographe (1a', 1b', 1b, 1c') dont les mouvements de repliement et de dépliement sont commandés par au moins un vérin double effet (14) pour provoquer une translation de l'outil (3). - Membre articulé (2a-2h) selon la revendication 1, caractérisé en ce que le pantographe est choisi parmi les pantographes à quatre bras (12a, 12b, 12c, 12d, 13a, 13b, 13c, 13d) articulés de type en losange (1a'), à deux bras (12, 13) articulés de type en Z (1b, 1b'), à entrecroisement de bras (23a, 23b, 24a, 24b) en ciseaux (1c').
- Membre articulé (2a-2h) selon la revendication 2 et comportant un outil (3) pour le traitement de parois d'un ouvrage (11), ledit membre étant constitué sur sa longueur de bras (9, 12, 13) montés au moins en série et articulés entre eux pour permettre au membre de se rétracter ou de se déployer, ledit membre ayant, d'une part, une extrémité proximale pourvue de moyens pour son montage sur un véhicule (10) adapté à se déplacer le long dudit ouvrage et, d'autre part, une extrémité distale portant l'outil, deux au moins des bras (12, 13) formant un pantographe à deux bras articulés de type en Z (1b, 1b') constitués, respectivement, d'une part d'un bras principal inférieur (12) et de son contre-bras inférieur (15) et d'autre part, d'un bras principal supérieur (13) et de son contre-bras supérieur (16), le bras principal inférieur (12) et de son contre-bras inférieur (15) étant articulés à une de leurs deux extrémités respectives à un même support (21),
dans lequel, ledit pantographe en Z comporte au moins un vérin double effet (14) étendu(s) entre le support (21) et le contre-bras inférieur (15) et est configuré afin que, lors de ses mouvements de repliement et de dépliement, son extrémité distale se translate le long d'un plan de translation déterminé, lesdits mouvements de repliement et de dépliement dudit pantographe en Z étant commandés par ledit au moins un vérin double effet (14). - Membre articulé (2a-2h) selon la revendication 3, caractérisé en ce que le bras principal inférieur (12), le contre-bras inférieur (15) et le bras principal supérieur (13) sont des plaques métalliques ajourées et en ce que le contre-bras supérieur (16) est constitué de deux tiges.
- Membre articulé (2a-2h) selon la revendication 3 ou 4, caractérisé en ce qu'il comporte deux étages en série de pantographes, les pantographes des étages étant du même type en Z (1b, 1b') ou étant de types différents dont au moins un étant de type en Z, le/les autres étant de type en losange (1a') ou à bras se croisant en ciseaux (1c').
- Membre articulé (2a-2h) selon l'une quelconque des revendications précédentes, caractérisé en ce qu'il comporte en outre un dispositif à bras télescopique monté en série le long dudit membre, le dispositif à bras télescopique étant actionné par un ou plusieurs vérins double effet.
- Membre articulé (2a-2h) selon l'une quelconque des revendications précédentes, caractérisé en ce qu'il comporte en outre un bras escamotable (9) monté en série sur la longueur dudit membre, ledit bras escamotable (9) pouvant basculer entre une position de travail fixe dans laquelle la contribution du bras escamotable dans la hauteur du membre articulé est maximale, et une position escamotée, la contribution du bras escamotable dans la hauteur du membre articulé étant réduite dans ladite position escamotée.
- Membre articulé (2a-2h) selon la revendication 7, caractérisé en ce que le bras escamotable (9) comporte en outre une position repliée dans laquelle la contribution du bras escamotable dans la hauteur du membre articulé est minimale.
- Membre articulé (2a-2h) selon la revendication 7 ou 8, caractérisé en ce que le bras escamotable (9) est disposé entre l'outil (3) fixé à l'extrémité distale dudit membre (2a-2h) et le/les pantographe(s) (1a', 1b', 1b, 1c').
- Membre articulé (2a-2h) selon l'une quelconque des revendications précédentes, caractérisé en ce que l'outil (3) est fixé à l'extrémité distale dudit membre (2a-2h) par l'intermédiaire d'une articulation de jonction (8), de préférence pour pivoter autour d'un axe de pivotement (19) sensiblement perpendiculaire aux axes d'articulation (17) des bras (12, 13) du pantographe (1b, 1b').
- Membre articulé (2a-2h) selon l'une quelconque des revendications précédentes, caractérisé en ce qu'il comporte dans l'ordre entre son extrémité proximale et son extrémité distale : un pantographe à deux bras articulés de type en Z (1b, 1b') et un bras escamotable (9), l'outil (3) étant fixé à l'extrémité distale du bras escamotable (9) par l'intermédiaire d'une articulation de jonction (8) et en ce que le pantographe est replié ou dépliée grâce à au moins un vérin (14) double effet, le bras escamotable est placé en position de travail ou en position repliée grâce à au moins un vérin (14) double effet et l'outil est orienté grâce à des moyens de commande d'orientation à vérins ou tilts.
- Membre articulé (2a-2h) selon l'une quelconque des revendications précédentes, caractérisé en ce qu'il comporte en outre un support basculant (4, 29) (5) fixé à l'extrémité proximale des bras dudit membre (2a-2h), en série avec eux, ledit support basculant permettant de fixer le membre articulé sur le véhicule (10), le support basculant tournant dans un plan perpendiculaire à un axe de basculement (28) fixé sur le véhicule.
- Membre articulé (2a-2h) selon l'une quelconque des revendications précédentes, caractérisé en ce que l'outil est un organe de lavage et en ce qu'il est adapté à un traitement de parois qui est un lavage de parois d'un ouvrage qui est un tunnel.
- Véhicule (10) de traitement de parois d'un ouvrage (11), caractérisé en ce qu'il comporte au moins un membre articulé (2a-2h) selon l'une quelconque des revendications précédentes et au moins un support basculant (4) (5) de fixation de membre(s) articulé(s) (2a-2h) et en ce que l'extrémité proximale dudit membre est fixée au véhicule par l'intermédiaire dudit support basculant (4) (5), le support basculant (4) (5) tournant dans un plan perpendiculaire à un axe de basculement parallèle à la direction de déplacement du véhicule (10) et permettant de déplacer l'outil dans un plan de balayage perpendiculaire à la direction de déplacement du véhicule, un même support basculant pouvant recevoir un ou plusieurs membres articulés, et dans le cas où un même support basculant (4) reçoit plusieurs membres articulés, lesdits membres articulés (2a, 2b, 2c) (2f, 2g, 2h) sont fixés sur le support basculant (4) en des positions angulaires distinctes autour de l'axe de basculement (28).
- Véhicule (10) selon la revendication 14, caractérisé en ce qu'il comporte un châssis escamotable pouvant être monté ou démonté du véhicule (10) et en ce que le/les membres articulés (2a-2h), directement ou par l'intermédiaire d'un/de supports basculants (4) (5), sont fixés audit châssis escamotable afin de permettre une autre utilisation audit véhicule lorsque ledit châssis avec ses membres articulés est démonté du véhicule.
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR1260244A FR2997424B1 (fr) | 2012-10-26 | 2012-10-26 | Membre articule comportant un outil de traitement de parois et vehicule de traitement de parois d'un ouvrage |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| EP2725141A2 true EP2725141A2 (fr) | 2014-04-30 |
| EP2725141A3 EP2725141A3 (fr) | 2016-04-20 |
| EP2725141B1 EP2725141B1 (fr) | 2017-11-22 |
Family
ID=47598921
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP13306474.1A Active EP2725141B1 (fr) | 2012-10-26 | 2013-10-25 | Membre articulé comportant un outil de traitement de parois et véhicule de traitement de parois d'un ouvrage |
Country Status (2)
| Country | Link |
|---|---|
| EP (1) | EP2725141B1 (fr) |
| FR (1) | FR2997424B1 (fr) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105256748A (zh) * | 2015-11-10 | 2016-01-20 | 山东汇强重工科技有限公司 | 一种多功能清洗车 |
| CN107620601A (zh) * | 2017-10-13 | 2018-01-23 | 湖南五新隧道智能装备股份有限公司 | 防水施工用旋转折叠臂组及包含此臂组的防水施工用台车 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105887737B (zh) * | 2016-06-02 | 2017-09-05 | 重庆交通大学 | 隧道侧壁清洗机 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2584747B1 (fr) * | 1985-07-12 | 1987-12-04 | Materiel De Voirie | Vehicule pour le nettoyage de la voirie, en particulier des parois de tunnels, passages souterrains et similaires |
| DE4423376A1 (de) * | 1994-07-04 | 1996-01-18 | Maschbau & Umwelttech Gmbh | Fahrzeug zum Strahlen von ebenen, gekrümmten und strukturierten Flächen |
| IT1406298B1 (it) * | 2010-11-02 | 2014-02-14 | S I M I N S P A | Apparecchiatura per spruzzare sostanze liquide, quali vernici o acqua, sulle pareti interne di gallerie |
| DE202011001292U1 (de) * | 2011-01-10 | 2011-03-10 | MULAG FAHRZEUGWERK Heinz Wössner GmbH & Co. KG | Tunnelwaschfahrzeug |
-
2012
- 2012-10-26 FR FR1260244A patent/FR2997424B1/fr active Active
-
2013
- 2013-10-25 EP EP13306474.1A patent/EP2725141B1/fr active Active
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105256748A (zh) * | 2015-11-10 | 2016-01-20 | 山东汇强重工科技有限公司 | 一种多功能清洗车 |
| CN107620601A (zh) * | 2017-10-13 | 2018-01-23 | 湖南五新隧道智能装备股份有限公司 | 防水施工用旋转折叠臂组及包含此臂组的防水施工用台车 |
| CN107620601B (zh) * | 2017-10-13 | 2023-09-05 | 湖南五新隧道智能装备股份有限公司 | 防水施工用旋转折叠臂组及包含此臂组的防水施工用台车 |
Also Published As
| Publication number | Publication date |
|---|---|
| FR2997424B1 (fr) | 2017-04-07 |
| EP2725141B1 (fr) | 2017-11-22 |
| EP2725141A3 (fr) | 2016-04-20 |
| FR2997424A1 (fr) | 2014-05-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3286128B1 (fr) | Nacelle elevatrice a protection contre les nids de poule | |
| EP0733584B1 (fr) | Grue à montage automatisé avec flèche repliable sur elle-même | |
| US9834423B2 (en) | Lift truck equipped with stabilizer means | |
| EP2725141B1 (fr) | Membre articulé comportant un outil de traitement de parois et véhicule de traitement de parois d'un ouvrage | |
| EP0945551B1 (fr) | Dispositif de balayage pour vehicule de voirie | |
| WO2016116688A1 (fr) | Navire à passerelle télescopique de transfert de personnes entre le navire et un objet stationnaire ou quasiment stationnaire en mer, tel qu'une éolienne | |
| US12246678B2 (en) | Mounted retractable catwalk for trucks, utility, construction, and industrial vehicles and equipment | |
| EP3377716B1 (fr) | Dispositif de structure déployable d'abri | |
| FR2904182A1 (fr) | Faucheuse attelable tractee avec dispositif de commande de l'inclinaison d'unites de fauchage. | |
| FR2607029A1 (fr) | Dispositif de traitement polyvalent, en particulier pour l'entretien des vignes, et vehicule tracteur ou engin tractable equipe d'un ou de plusieurs de ces dispositifs | |
| JP4537897B2 (ja) | 草刈機 | |
| FR2816727A1 (fr) | Appareil de commande de conduite d'un vehicule utilitaire | |
| WO2009034272A2 (fr) | Dispositif elevateur pour fauteuil roulant | |
| WO2017098122A1 (fr) | Ensemble de propulsion d'aeronef equipe de marches permettant a un operateur d'atteindre sa portion superieure | |
| FR3005986A1 (fr) | Marchepied muni de roues escamotables, dont une roue avant montee basculante avec commande manuelle | |
| EP3070203B1 (fr) | Système de chargement, de déchargement et de pose sur une voie ferrée d'un appareil de voie ferrée | |
| JP4105969B2 (ja) | 梯子車 | |
| US12214748B2 (en) | Angle folded egress ladder | |
| FR2958637A1 (fr) | Dispositif de pose de plaques, notamment de plaques anti-incendie | |
| EP4356705A1 (fr) | Machine agricole repliable avec une partie et un composant relies cinematiquement entre eux | |
| FR2786454A1 (fr) | Hayon elevateur retractable | |
| EP1609449A2 (fr) | Véhicule automobile pour personne à mobilité réduite | |
| FR2641029A1 (fr) | ||
| FR2903095A1 (fr) | Dispositif de lest mobile pour grue a tour transportable | |
| WO2014177795A1 (fr) | Vehicule equipe d'un dispositif de protection d'ouvrant assurant une optimisation du gabarit d'ouverture |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 20131025 |
|
| AK | Designated contracting states |
Kind code of ref document: A2 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| PUAL | Search report despatched |
Free format text: ORIGINAL CODE: 0009013 |
|
| AK | Designated contracting states |
Kind code of ref document: A3 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: E01H 1/00 20060101AFI20160315BHEP |
|
| 17P | Request for examination filed |
Effective date: 20160525 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| 17Q | First examination report despatched |
Effective date: 20161004 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: EXAMINATION IS IN PROGRESS |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTG | Intention to grant announced |
Effective date: 20170816 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: FRENCH |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 948521 Country of ref document: AT Kind code of ref document: T Effective date: 20171215 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 602013029719 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: NV Representative=s name: JACOBACCI CORALIS HARLE C/O JACOBACCI AND PART, CH |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20171122 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20171122 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20171122 Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20171122 Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20171122 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180222 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20171122 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20171122 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180222 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20171122 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180223 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20171122 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20171122 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20171122 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20171122 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20171122 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20171122 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 602013029719 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20171122 Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20171122 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20171122 Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20171122 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20171122 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed |
Effective date: 20180823 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20171122 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: AT Payment date: 20180906 Year of fee payment: 6 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R119 Ref document number: 602013029719 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PCOW Free format text: NEW ADDRESS: 1, RUE DU COLONEL PIERRE AVIA, 75015 PARIS (FR) |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20181025 |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20181031 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20171122 Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20181025 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: MM4A |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190501 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20181031 Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20181031 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20181025 Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20181025 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20171122 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20171122 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20171122 Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20131025 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20171122 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20180322 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MM01 Ref document number: 948521 Country of ref document: AT Kind code of ref document: T Effective date: 20191025 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20191025 |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Effective date: 20230523 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: U11 Free format text: ST27 STATUS EVENT CODE: U-0-0-U10-U11 (AS PROVIDED BY THE NATIONAL OFFICE) Effective date: 20251101 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: CH Payment date: 20251101 Year of fee payment: 13 |