EP3042368B1 - Verfahren, auswertesystem und fahrzeug zum prognostizieren von mindestens einem stauparameter - Google Patents
Verfahren, auswertesystem und fahrzeug zum prognostizieren von mindestens einem stauparameter Download PDFInfo
- Publication number
- EP3042368B1 EP3042368B1 EP14761580.1A EP14761580A EP3042368B1 EP 3042368 B1 EP3042368 B1 EP 3042368B1 EP 14761580 A EP14761580 A EP 14761580A EP 3042368 B1 EP3042368 B1 EP 3042368B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- traffic
- vehicle
- traffic density
- vehicles
- evaluation unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Not-in-force
Links
Images

Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/0104—Measuring and analyzing of parameters relative to traffic conditions
- G08G1/0125—Traffic data processing
- G08G1/0133—Traffic data processing for classifying traffic situation
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/0104—Measuring and analyzing of parameters relative to traffic conditions
- G08G1/0108—Measuring and analyzing of parameters relative to traffic conditions based on the source of data
- G08G1/0112—Measuring and analyzing of parameters relative to traffic conditions based on the source of data from the vehicle, e.g. floating car data [FCD]
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/0104—Measuring and analyzing of parameters relative to traffic conditions
- G08G1/0125—Traffic data processing
- G08G1/0129—Traffic data processing for creating historical data or processing based on historical data
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/0104—Measuring and analyzing of parameters relative to traffic conditions
- G08G1/0137—Measuring and analyzing of parameters relative to traffic conditions for specific applications
- G08G1/0141—Measuring and analyzing of parameters relative to traffic conditions for specific applications for traffic information dissemination
Definitions
- the invention relates to the field of vehicle technology and proposes a method, an evaluation system and a cooperative vehicle for predicting at least one congestion parameter.
- a backend-based system architecture such as a server within a communication network, uses motion profiles of the networked vehicles.
- FCD Floating Car Data
- Additional values such as the speed within the traffic jam or the type of traffic flow, can be determined in addition to the current positions of traffic jam and jam end.
- FCD Floating Car Data
- Additional values such as the speed within the traffic jam or the type of traffic flow, can be determined in addition to the current positions of traffic jam and jam end.
- the information obtained can be distributed via an online service using mobile technology to other vehicles. This provision of information makes it possible for networked vehicles to generate a telematic route foresight and to gain knowledge about conditions that are so far impossible to grasp with a local environment perception.
- An important factor for the applicability of the information is the accuracy of the position of the congestion start and the end of the congestion, since these positions directly affect the quality of the congestion forecast and its dependent functions.
- document DE 10 2011 083677 A1 relates to a method for forecasting a traffic situation for a vehicle in which at least one possible future for the traffic situation of the vehicle is determined on the basis of a current state of the vehicle and on the basis of historical data.
- tail ends over a longer time course allows prediction of the tail end development and allows estimation of additional propagation parameters, such as speed and direction, over which the tail end will evolve over time.
- additional propagation parameters such as speed and direction
- the development has progressed so far that one not only wants to detect the presence of a traffic jam, but also dynamic parameters of congestion, such as its speed and the location of the congestion start at a given time.
- An exact prognosis of the developing traffic jam situation is relevant for the further planning of a traffic route. For a vehicle present in the traffic flow, the time of arrival at the traffic jam plays a greater role than the time of detection of the tail end in the backend architecture. However, the previous forecasts are inaccurate to predict a time for arrival at a jam end.
- the invention is therefore based on the object to propose a solution, in which way congestion parameters can be provided more precisely.
- This object is achieved by a method for predicting at least one stagnation parameter according to claim 1.
- detection of a traffic density detection of a current position, which is present when the traffic density is detected, and transmission of the traffic density and the current position to an evaluation unit are provided. Furthermore, the method comprises evaluating the traffic density and providing at least one congestion parameter.
- the evaluation system has an evaluation unit for evaluating a traffic density. Furthermore, the evaluation system has a transmission connection to at least one cooperative vehicle in an inflow area of a traffic jam and a reception unit in order to receive the traffic density and a current position of the cooperative vehicle, wherein the current position of the cooperative vehicle is present in the detection of the traffic density.
- the traffic density can be evaluated with the evaluation unit.
- at least one stagnation parameter can be provided with the evaluation unit.
- the evaluation system indicates a cooperative vehicle for providing traffic density for predicting at least one congestion parameter.
- the cooperative vehicle has at least one transmission connection to an evaluation unit and a detection unit for detecting the traffic density. Further, the cooperative vehicle has a detection unit for detecting the current position that exists in the detection of the traffic density. Furthermore, the cooperative vehicle has a transmission unit for transmitting the traffic density and the current position via the transmission connection to the evaluation unit.
- the invention is based on a prognosis of at least one congestion parameter, wherein a traffic density is evaluated.
- a traffic density is to be understood as meaning a number of vehicles per route.
- vehicles which are equipped as cooperative vehicles have pick-up systems to locate other nearby vehicles.
- recording systems for example, cameras, e.g. a front camera, a rear camera or a swivel camera in or on the vehicle for use.
- radar systems can also be used.
- the cooperative vehicles may record radio communications with other cooperative vehicles. Furthermore, the cooperative vehicles can record radio-contact to permanently installed devices, such as a central evaluation unit or an installed gantry, which collects and transmits traffic data.
- a cooperative vehicle can determine both the distance to other neighboring vehicles as well as their speed. By adjacent vehicles is meant moving or stationary vehicles in the vicinity of the cooperative vehicle. The cooperative vehicle can thus also determine the number of surrounding vehicles and additionally their parameters, such as speed, direction of travel and their current position.
- an environment sensor advantageously with a camera, a front radar and / or a rear radar.
- Using traffic density for congestion forecasting has significant advantages over previously known methods using other parameters.
- a true prognosis can take place, i. forecasting a traffic jam in a forward-looking manner.
- the congestion parameter may be a position of a congestion start and / or tail end.
- These are determined congestion parameters that can be determined by a central evaluation unit or by a cooperative vehicle itself. Since cooperative vehicles can also communicate with each other, parameters for a congestion forecast can be collected by other vehicles and evaluated in their own vehicle. However, it has advantages if this task assumes a central unit, since it has a better overview and / or more computing power than a single cooperative vehicle.
- a value for the traffic volume or traffic density is determined by cooperative vehicles, also called participating vehicles, with the aid of weighted parameters, for example from airspeed, number of vehicles that can be detected with surroundings sensors and distances to these vehicles, number of cooperative vehicles, also called Car2x-capable vehicles, in a given area.
- the more cooperative vehicles participate in forecasting a congestion parameter the more accurate the prognosis can be.
- a traffic density is determined in a cooperative vehicle and transmitted together with its current position via a radio link, e.g. with a Car2x system, distributed to a central unit as an evaluation system, for example a server, and / or to other cooperative vehicles.
- a very accurate traffic density information can be calculated on the central unit.
- the cooperative vehicles can make an early picture of the expected traffic volume.
- the central unit for example a server, can summarize all the information transmitted and has very accurate information about the current traffic flow in a particular area.
- the total density values are composed of the individual traffic density values transmitted from the individual cooperative vehicles to the central unit.
- the traffic density values of the individual vehicles can be provided with a quality factor, for example, to take into account the quality of the transmitted information.
- the quality of the transmitted traffic density value from a cooperative vehicle for example, depends on the detection system used in the cooperative vehicle, the technology stage of the detection system and its model execution.
- the central unit determines an approximation function from the obtained traffic density values of the individual cooperative vehicles. This approximation function shows the traffic over the route. Based on a digital road map, parameters can be used to correct a traffic jam forecast. In this case, information from incoming and outgoing roads can be taken into account, such as motorway junctions. The individual paths, i. the incoming and outgoing roads take into account the direction of the traffic flow and can be weighted with probabilities.
- the detection of the traffic density is carried out in an inflow area of a traffic jam.
- a traffic volume in an inlet on a traffic jam end can be an important indicator for the further development of the traffic jam until the time of the actual arrival of the own vehicle at the traffic jam.
- the course of the traffic volume is advantageously determined from the current own position to the end of the traffic jam.
- With its own position is meant the position of a cooperative vehicle, which would like to prepare for a drive on a jam end.
- a preparation may be in the form of a suggestion for a congestion avoidance route, or information as to when a congestion end is reached.
- An inflow parameter is determined in an inflow area of a traffic jam and is, for example, the speed of the own vehicle, the speed of foreign vehicles, which are still detected, for example, although they are not cooperative vehicles.
- historical data is taken into account in evaluating the traffic density.
- a jam position, i. the beginning and end of a traffic jam can be predicted from the current time history using historical data.
- the current time history with appropriate time histories of the past, such as the same time, the same day of the week, etc., to be compared. If the gradients in the temporally covered area agree, the future congestion development can be predicted based on the time course of the past.
- the timing of the current situation can be increased by adding a constant offset, i. of a constant value, to be extrapolated to the historical record.
- additional traffic information such as accident situation, festive event, etc., can be taken into account and / or a forecast of the resolution of the congestion until the arrival of the own vehicle at the potential end of the congestion can be established on the basis of historical determined decay times.
- weighting of a possible congestion avoidance path may be present with a probability in the traffic density evaluation.
- the calculation of a congestion avoidance path can take into account the desired travel destination of a vehicle, for example on the basis of historical data or due to an input in a navigation device. Furthermore, based on historical data, it can be predicted how many vehicles may habitually use the congestion avoidance path without reacting to the actual congestion. This means that it takes into account the flow of vehicles that wanted to drive this path anyway and are not affected by the traffic jam.
- a vehicle-specific quality value can be taken into account when evaluating the traffic density.
- a vehicle-specific quality value can be transmitted to a central unit, eg a server, and / or other vehicles.
- a central unit eg a server
- different technical sensor levels can be considered in the vehicles.
- different technology levels can be taken into account by means of a vehicle-specific quality value. If even more accurate sensor systems are available at a later date, the values of such vehicles could be prioritized higher than the values of vehicles with older or more fault-prone systems. In this way it is taken into account that newer technologies in new vehicles with higher accuracy measure parameters than older technologies in older vehicles.
- Fig. 1 shows a first congestion situation 10 with a plurality of vehicles 11-22, wherein a first group of vehicles 11-16 are located in an inlet area 31 on the congestion and wherein a second group of vehicles 17-22 are already in a storage area 32 ,
- the inlet area 31 and the storage area 32 are shown schematically.
- the vehicles 11-16 still have the opportunity to drive a higher speed, while the vehicles 17-22 in the storage area 32 by the slow movement of the congestion or the stoppage of the congestion speed is set. Accordingly, the vehicles 11-16 move much faster than the vehicles 17-22.
- a congestion parameter is, for example, the location of the congestion start.
- an exemplary method for forecasting congestion parameters is described from the perspective of the vehicle 11.
- the vehicle 11, as well as the vehicles 12, 15 and 18 are designed as cooperative vehicles. This means that they can participate in a procedure for predicting congestion parameters.
- These vehicles 11, 12, 15, 18 are each equipped with at least one detection unit 41-44 for detecting the traffic density, for example in each case a camera.
- these vehicles 11, 12, 15, 18 are each equipped with a transmission unit 51-54, which makes it possible to determine the determined traffic density and a thereby determined position of the respective vehicle 11, 12, 15, 18 to a central evaluation unit 60 via a transmission link 61 to submit.
- the central evaluation unit 60 is embodied here as a unit in a fixed service center.
- the service center is operated by one or more automakers and serves as a service to its customers.
- the cooperative vehicles independently detect a traffic density that exists in their current situation on the road. At the same time, the cooperative vehicles also record their current position at the same time, since the traffic density depends on the position of each individual vehicle. For example, the vehicle 12 determines a different level of traffic density than the vehicle 18 that is already in traffic. Since the traffic density is defined as vehicles per route, the vehicle 18 determines smaller distances to its neighboring vehicles than the vehicle 12. The determined traffic density of the vehicle 18 is therefore higher than the determined traffic density of the vehicle 12.
- the determination of the traffic density is shown in the attached diagram 70 in FIG Fig. 1 shown.
- the position x or the location x of a vehicle is indicated on the x-axis, while traffic information is plotted on the y-axis.
- the marked locations 71, 72, 73, 74 are the determined traffic density values of the vehicles 11, 12, 15, 18.
- a dashed line indicates a correlation between the determined traffic densities to the respective vehicles 11, 12, 15, 18.
- the determined traffic views 71-74 of the cooperative vehicles lie on an approximate curve 75, which can be determined centrally by the unit 60 in the evaluation of the traffic densities 71-74.
- the traffic densities 71-74 result from several measurements of a single vehicle, namely one measurement each to an adjacent vehicle, in the view of the karma of the determining vehicle is. In this case, the distance to the adjacent vehicle enters into the determination. Furthermore, a weighting can be carried out as to whether an adjacent vehicle was determined in front of or behind the own vehicle.
- a determined traffic density of the own vehicle takes into account all neighboring vehicles that can be detected with the installed detection systems of the own vehicle.
- the traffic density is a summary of detected vehicles in the vicinity of the vehicle, which determines the traffic density.
- This determined value of the traffic density of a single vehicle is understood as traffic density 71-74.
- several determined traffic densities of different vehicles for a location x can be summarized, for example, by the central unit 60, which collects temporally offset from several vehicles with their position individual traffic densities 71-74.
- the aggregated value of individual determined traffic densities of multiple vehicles is then a total value of the traffic densities or total traffic density value determined by the central unit 60 and provided to cooperative vehicles directly or indirectly as information.
- the determined traffic densities 71-74 can be specified as a relative number, for example in a value range from 0 to 10, where the value 0 means free travel, from the value 4 there is an intake to a traffic jam and from the value 7 a traffic jam situation exists ,
- the vehicle 11 determines, for example, a traffic density of the value 4, since it does not recognize a further vehicle with a rear camera and recognizes the vehicle 12 and the vehicle 13 with a front camera.
- the vehicle 12 determines, for example, a traffic density of the value 5, since it recognizes the vehicle 11 with a rear camera and recognizes the two vehicles 14 and 13 with a front camera. Other vehicles in front direction are covered by the already detected vehicles and are not recognized.
- the vehicle 15 determines, like the vehicle 12, for example, a traffic density of the value 5, since it recognizes the vehicle 14 and 13 with a rear camera and recognizes the vehicle 16 with a front camera.
- the vehicle 15 determines the same traffic density value as the vehicle 12, with a total of three vehicles.
- the vehicle 18 is already in the traffic jam 32 and detects four vehicles, namely vehicles 17 and 20 with a rear camera and vehicles 19 and 22 with a front camera.
- the vehicle 21 is located laterally from the vehicle 18 and could be detected with a swivel camera.
- the vehicle determines a traffic density of the value 10, since the distances to the determined neighboring vehicles are low and the speed of the vehicle 18 is zero, since it is in the storage area 32 with its neighboring vehicles. If a speed of the vehicle 18 were present, this could be incorporated into a determination of the traffic density, so that, for example, a lower value of 9 would result.
- the determination of the traffic density in this example takes place in each individual cooperative vehicle and is transmitted by the latter together with the current vehicle position, for example in the form of GPS data, to the evaluation unit 60 and received there by a detection unit 62 or reception unit 62. There, the data is collected and evaluated one or more stagnation parameters.
- the evaluation unit 60 with a transmission unit 63 can provide one or more congestion parameters to the cooperative vehicles 11, 12, 15, 18.
- the stagnation parameters may be the location of the end of the stagnation, the location of the congestion start, the average speed in the inlet area of the congestion 31, the average speed in the actual stowage area 32 and possible escape paths within the congestion inflow area and before reaching the start of the dust.
- the interest in the various stowage parameters may vary for each vehicle. For example, it is interesting for the vehicle 11 whether it has an alternative option on an alternative route before reaching the end of the jam. For the vehicle 18, on the other hand, it is of interest at which point the start of the dust lies and what time the vehicle 18 still needs to be able to leave the traffic jam.
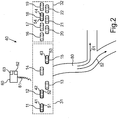
- Fig. 2 shows a second embodiment with a second congestion situation 40, wherein the traffic volume with the vehicles 11-22 from the first embodiment of the Fig. 1 is assumed.
- Fig. 2 shows a traffic situation, which depends on the time of the situation Fig. 1 follows.
- the vehicle 16 has already traveled to the traffic jam and now forms the end of the jam in the area 32.
- the two vehicles 19 and 32 continue to form the beginning of the jam in the area 32.
- the cooperative vehicle 15 is still in the inlet area 31 of the jam, but can no alternative route to be performed because there is no branch for a congestion avoidance path in the direction ahead.
- About the central time 60 is now the vehicle 15th warned against congestion to prevent it from approaching the end of the jam at high speed.
- the central unit 60 communicates to the vehicle 15 a relative position of congestion, for example in 500 meters of traffic jam, with respect to the current position of the vehicle 15. Further, the central unit 60 transmits to the vehicle 15 that it will reach the jam end in about 11 seconds.
- a jam avoidance path 80 is located in the direction of travel of the two vehicles 11 and 12.
- the central unit 60 calculates for each of the vehicles 11 and 12, taking into account their respective destinations, whether the congestion avoidance path 80 is suitable to reach the desired destination more quickly.
- the jam avoidance path 80 is unfavorable because the central unit 60 has taken into account historical data in determining the traffic density for this congestion avoidance path 80 and a subsequent necessary route 81 for the vehicle 12.
- the central unit 60 comes to the conclusion that at the time of day now available for the vehicle 12 is more convenient not to use the congestion avoidance path, as well as a congestion forms there with a high probability as in the storage area 32, but much longer is the jam of the storage area 32.
- the situation of Fig. 2 is different for the vehicle 11 than for the vehicle 12.
- the vehicle 12 has a different destination than the vehicle 12.
- the central unit 60 it can drive the congestion avoidance path 80, since then results in a different route 82.
- This route does not lead, as in the case of vehicle 12, into a further traffic jam, but into a traffic jam-free road, which is not very busy at the given time.
- vehicle 12 could also use this road, it would have to take too much detours, which would take a longer time than to pass through the congestion of area 32.
- FCD Floating Car Data
Landscapes
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Traffic Control Systems (AREA)
Description
- Die Erfindung betrifft das Gebiet der Fahrzeugtechnik und schlägt ein Verfahren, ein Auswertesystem und ein kooperatives Fahrzeug zum Prognostizieren von mindestens einem Stauparameter vor.
- In
DE 10 2008 003 039 A1 wird ein Verfahren zur Erkennung von Verkehrszuständen auf der Basis von Messdaten beschrieben, wobei die Messdaten in einem Fahrzeug gewonnen werden. Hierbei wird eine Eigengeschwindigkeit des Fahrzeugs, Abstände und Relativgeschwindigkeiten von anderen Fahrzeugen in der Umgebung des Fahrzeugs erfasst, um eine Verkehrszustandserkennung in dem Fahrzeug selbst durchzuführen. - Ferner sind Systeme zur Erkennung von Verkehrsstaus im Straßennetz bekannt, bei denen Positions- und Bewegungsdaten von vernetzten Fahrzeugen verwendet werden. Hierbei verwendet eine backend-basierte Systemarchitektur, wie beispielsweise ein Server innerhalb eines Kommunikationsnetzwerkes, Bewegungsprofile der vernetzten Fahrzeuge. Das Prinzip der vernetzten Fahrzeuge ist auch unter dem Begriff Floating Car Data (=FCD) bekannt. Es können neben den aktuellen Positionen von Stauanfang und Stauende zusätzliche Werte, wie die Geschwindigkeit innerhalb des Staus oder die Art des Verkehrsflusses ermittelt werden. Die gewonnenen Informationen können über einen Online-Dienst per Mobilfunktechnologie an weitere Fahrzeuge verteilt werden. Diese Bereitstellung von Informationen ermöglicht es, vernetzten Fahrzeugen eine telematische Streckenvorausschau zu generieren und bereits Kenntnis über Gegebenheiten zu erlangen, die mit einer lokalen Umfeldwahrnehmung bislang nicht erfassbar sind. Ein wichtiger Faktor für die Anwendbarkeit der Informationen ist die Genauigkeit der Position des Stauanfangs und des Stauendes, da diese Positionen direkt die Qualität der Stauprognose und davon abhängige Funktionen beeinflusst.
- Dokument
DE 10 2011 083677 A1 betrifft ein Verfahren zur Prognose einer Verkehrssituation für ein Fahrzeug, bei dem anhand eines aktuellen Zustands des Fahrzeugs und anhand historischer Daten mindestens eine mögliche Zukunft für die Verkehrssituation des Fahrzeugs bestimmt wird. - Eine Beobachtung von Stauenden über einen längeren zeitlichen Verlauf ermöglicht die Prognostizierung der Entwicklung des Stauendes und erlaubt eine Schätzung von zusätzlichen Propagationsparametern, wie Geschwindigkeit und Richtung, in die sich das Stauende im zeitlichen Verlauf weiter entwickeln wird. Dies bedeutet, dass die Entwicklung so weit fortgeschritten ist, dass man nicht nur das Vorhandensein eines Staus feststellen möchte, sondern auch dynamische Parameter des Staus, wie seine Geschwindigkeit und der Ort des Stauanfangs zu einem bestimmten Zeitpunkt. Eine exakte Prognose der sich entwickelnden Stausituation ist relevant für die weitere Planung einer Verkehrsroute. Für ein im Verkehrsfluss vorhandenes Fahrzeug spielt der Zeitpunkt des Eintreffens am Stau eine größere Rolle als der Zeitpunkt der Erfassung des Stauendes in der Backend-Architektur. Allerdings sind die bisherigen Prognosen ungenau, um einen Zeitpunkt für ein Eintreffen an einem Stauende vorherzusagen.
- Der Erfindung liegt daher die Aufgabe zugrunde eine Lösung vorzuschlagen, auf welche Weise Stauparameter präziser bereitgestellt werden können.
- Diese Aufgabe wird mit einem Verfahren zum Prognostizieren von mindestens einem Stauparameter gemäß Anspruch 1 gelöst. Hierbei ist bei dem Verfahren ein Erfassen einer Verkehrsdichte, ein Erfassen einer aktuellen Position, die bei der Erfassung der Verkehrsdichte vorhanden ist und ein Übermitteln der Verkehrsdichte und der aktuellen Position an eine Auswerteeinheit vorgesehen. Ferner weist das Verfahren ein Auswerten der Verkehrsdichte und ein Bereitstellen mindestens eines Stauparameters auf.
- Ferner wird die Aufgabe der vorliegenden Erfindung mit einem Auswertesystem zum Prognostizieren von mindestens einem Stauparameter gemäß Anspruch 7 gelöst. Das Auswertesystem weist eine Auswerteeinheit zum Auswerten einer Verkehrsdichte auf. Ferner weist das Auswertesystem eine Übertragungsverbindung zu mindestens einem kooperativen Fahrzeug in einem Zuflussbereich eines Verkehrsstaus und eine Empfangseinheit auf, um die Verkehrsdichte und eine aktuelle Position des kooperativen Fahrzeugs zu empfangen, wobei die aktuelle Position des kooperativen Fahrzeugs bei der Erfassung der Verkehrsdichte vorhanden ist. Hierbei ist mit der Auswerteeinheit die Verkehrsdichte auswertbar. Ferner ist mit der Auswerteeinheit mindestens ein Stauparameter bereitstellbar. Das Auswertesystem weist auf ein kooperatives Fahrzeug zum Bereitstellen einer Verkehrsdichte für ein Prognostizieren von mindestens einem Stauparameter gelöst. Das kooperative Fahrzeug weist mindestens eine Übertragungsverbindung zu einer Auswerteeinheit und eine Erfassungseinheit zum Erfassen der Verkehrsdichte auf. Ferner weist das kooperative Fahrzeug eine Erfassungseinheit auf zum Erfassen der aktuellen Position, die bei der Erfassung der Verkehrsdichte vorhanden ist. Desweitern weist das kooperative Fahrzeug eine Übertragungseinheit auf zum Übermitteln der Verkehrsdichte und der aktuellen Position über die Übertragungsverbindung an die Auswerteeinheit.
- Weitere Vorteilsangaben ergeben sich aus den Unteransprüchen, die für ein Verfahren formuliert wurden, wobei die entsprechenden Merkmale auch für das erfindungsgemäße Auswertesystem und das erfindungsgemäße Fahrzeug gelten.
- Die Erfindung geht von einem Prognostizieren von mindestens einem Stauparameter aus, wobei eine Verkehrsdichte ausgewertet wird. Hierbei ist unter einer Verkehrsdichte eine Anzahl an Fahrzeugen pro Strecke zu verstehen. Zur Aufnahme einer Verkehrsdichte kommen Fahrzeuge in Frage, die als kooperative Fahrzeuge ausgestattet sind. Solche kooperativen Fahrzeuge weisen Aufnahmesysteme auf, um andere in der Umgebung vorhandene Fahrzeuge zu lokalisieren. Hierbei kommen als Aufnahmesysteme beispielsweise Kameras, z.B. eine Frontkamera, eine Rückkamera oder eine schwenkbare Kamera im oder am Fahrzeug zum Einsatz. Ferner können auch Radarsysteme zum Einsatz kommen.
- Die kooperativen Fahrzeuge können Funkverbindungen zu anderen kooperativen Fahrzeugen aufnehmen. Ferner können die kooperativen Fahrzeuge zu fest installierten Einrichtungen einen Funkkontakt aufnehmen, wie beispielsweise einer zentralen Auswerteeinheit oder einer installierten Schilderbrücke, die Verkehrsdaten sammelt und übermittelt. Ein kooperatives Fahrzeug kann sowohl die Entfernung zu anderen benachbarten Fahrzeugen ermitteln als auch deren Geschwindigkeit. Unter benachbarten Fahrzeugen werden fahrend oder stehende Fahrzeuge in der Umgebung des kooperativen Fahrzeugs verstanden. Das kooperative Fahrzeug kann somit auch die Anzahl der umgebenden Fahrzeuge ermitteln und zusätzlich deren Parameter, wie Geschwindigkeit, Fahrtrichtung und deren aktuelle Position. Insgesamt ist ein kooperatives Fahrzeug mit einer Umfeldsensorik ausgestattet, vorteilhafterweise mit einer Kamera, einem Frontradar und/oder einem Heckradar.
- Das Verwenden einer Verkehrsdichte zur Stauprognose hat erhebliche Vorteile gegenüber bisher bekannten Verfahren, die andere Parameter verwenden. Im vorliegenden Fall kann eine echte Prognose stattfinden, d.h. in vorausschauender Weise ein Stau prognostiziert werden.
- Mit Vorteil kann der Stauparameter eine Position eines Stauanfangs und/oder Stauendes sein. Dies sind ermittelte Stauparameter, die von einer zentralen Auswerteeinheit oder von einem kooperativen Fahrzeug selbst ermittelt werden können. Da kooperative Fahrzeuge auch untereinander kommunizieren können, können Parameter für eine Stauprognose von weiteren Fahrzeugen gesammelt und im eigenen Fahrzeug ausgewertet werden. Es hat jedoch Vorteile, wenn diese Aufgabe eine zentrale Einheit übernimmt, da diese einen besseren Überblick und/oder mehr Rechenleistung hat als ein einzelnes kooperatives Fahrzeug.
- Zur Prognose von mindestens einem Stauparameter wird von kooperativen Fahrzeugen, auch teilnehmende Fahrzeuge genannt, ein Wert für das Verkehrsaufkommen bzw. der Verkehrsdichte mit Hilfe von gewichteten Parametern, beispielsweise aus Eigengeschwindigkeit, Anzahl der Fahrzeuge, die mit einer Umfeldsensorik erfasst werden können, Geschwindigkeit dieser Fahrzeuge und Abstände zu diesen Fahrzeugen, Anzahl der kooperativen Fahrzeuge, auch Car2x-fähige Fahrzeuge genannt, in einem bestimmten Gebiet. Je mehr kooperative Fahrzeuge an einer Prognose eines Stauparameters teilnehmen, desto genauer kann die Prognose sein. Aus einem oder mehrerer dieser Faktoren wird eine Verkehrsdichte in einem kooperativen Fahrzeug ermittelt und zusammen mit dessen aktueller Position über eine Funkverbindung, z.B. mit einem Car2x-System, an eine zentrale Einheit als Auswertesystem, beispielsweise einem Server, und/oder an weitere kooperative Fahrzeuge verteilt. Somit kann auf der zentralen Einheit eine sehr genaue Verkehrsdichteinformation berechnet werden. Ferner können sich die kooperativen Fahrzeuge frühzeitig ein Bild von dem zu erwartenden Verkehrsaufkommen machen.
- Die zentrale Einheit, beispielsweise ein Server kann alle übermittelten Informationen zusammenfassen und hat eine sehr genaue Information über den aktuellen Verkehrsfluss in einem bestimmten Gebiet. Je mehr Fahrzeuge gleichzeitig zu einem Gesamt-Verkehrsdichtewert an einer bestimmten Position x beitragen, desto höher ist die Qualität oder die Güte diese Verkehrsdichtewertes. Der Gesamtdichtewerte setzt sich zusammen aus den einzelnen Verkehrdichtewerten, die von den einzelnen kooperativen Fahrzeugen an die zentrale Einheit übermittelt wurden. Hierbei können die Verkehrsdichtewerte der einzelnen Fahrzeuge mit einem Gütefaktor versehen werden, um beispielsweise die Qualität der übermittelten Information zu berücksichtigen. Die Qualität des übermittelten Verkehrsdichtewertes von einem kooperativen Fahrzeug hängt beispielsweise von dem verwendeten Erfassungssystem im kooperativen Fahrzeug ab, dem Technologiestadium des Erfassungssystems und dessen Modellausführung.
- Die zentrale Einheit ermittelt aus den erhaltenen Verkehrsdichtewerten der einzelnen kooperativen Fahrzeuge eine Näherungsfunktion. Diese Näherungsfunktion zeigt das Verkehrsaufkommen über den Streckenverlauf. Basierend auf einer digitalen Straßenkarte können Parameter zur Korrektur einer Stauprognose verwendet werden. Hierbei können noch Informationen von zu- und abführenden Strassen berücksichtigt werden, wie beispielsweise Autobahnkreuze. Die einzelnen Pfade, d.h. die zu- und abführenden Strassen, berücksichtigen die Richtung des Verkehrsflusses und können mit Wahrscheinlichkeiten gewichtet werden.
- Aus den Verkehrsinformationen und den Pfadwahrscheinlichkeiten, bei Zulauf auf den Stau bzw. Ablauf von dem Stau, kann die Entwicklung des Staus bis zum Zeitpunkt des eigenen Eintreffens bestimmt werden.
- Vorteilhafterweise wird das Erfassen der Verkehrsdichte in einem Zulaufbereich eines Verkehrsstaus durchgeführt. Ein Verkehrsaufkommen in einem Zulauf auf ein Stauende kann ein wichtiger Indikator für die Weiterentwicklung des Staus bis zum Zeitpunkt des eigentlichen Eintreffens des eigenen Fahrzeugs am Stau sein. Entsprechend wird mit Vorteil der Verlauf des Verkehrsaufkommens von der aktuellen eigenen Position bis zum Stauende ermittelt. Mit eigener Position ist hier die Position eines kooperativen Fahrzeugs gemeint, das sich auf ein Auffahren auf ein Stauende vorbereiten möchte. Eine Vorbereitung kann in Form eines Vorschlags für eine Stauausweichroute geschehen oder eine Information, wann ein Stauende erreicht wird.
- Ferner kann ein Berücksichtigen von mindestens einem Zuflussparameter bei dem Auswerten der Verkehrsdichte vorgesehen werden. Ein Zuflussparameter wird in einem Zuflussbereich eines Staus ermittelt und ist beispielsweise die Geschwindigkeit des eigenen Fahrzeugs, die Geschwindigkeit von Fremdfahrzeugen, die beispielsweise dennoch erfasst werden, obwohl sie keine kooperativen Fahrzeuge sind. Erfindungsgemäß werden historische Daten bei dem Auswerten der Verkehrsdichte berücksichtigt Eine Stauposition, d.h. der Anfang und das Ende eines Staus, kann anhand des aktuellen zeitlichen Verlaufs unter Verwendung von historischen Daten prognostiziert werden. Dabei kann der aktuelle zeitliche Verlauf mit geeigneten Zeitverläufen aus der Vergangenheit, wie gleiche Uhrzeit, gleicher Wochentag, etc., verglichen werden. Stimmen die Verläufe im zeitlich überdeckten Bereich überein, kann anhand des zeitlichen Verlaufs der Vergangenheit die zukünftige Stauentwicklung vorhergesagt werden. Bei einer gleichmäßigen Abweichung zwischen dem aktuellen und dem historischen Datensatz kann der zeitliche Verlauf der aktuellen Situation durch Hinzufügen eines konstanten Offsets, d.h. eines konstanten Wertes, auf den historischen Datensatz extrapoliert werden. Ferner, bei sprunghaften, stochastischen Abweichungen können zusätzliche Verkehrsinformationen, wie Unfallsituation, Festveranstaltung, etc. berücksichtigt werden und/oder anhand von historischen ermittelten Verfallszeiten eine Prognose über die Auflösung des Staus bis zum Eintreffen des eigenen Fahrzeugs beim potentiellen Stauende erstellt werden.
- Ferner kann ein Gewichten eines möglichen Stauausweichpfades mit einer Wahrscheinlichkeit bei dem Auswerten der Verkehrsdichte vorhanden sein. Die Berechnung eines Stauausweichpfades kann das angestrebte Fahrziel eines Fahrzeugs, beispielsweise aufgrund von historischen Daten oder aufgrund einer Eingabe in einem Navigationsgerät, berücksichtigen. Ferner kann aufgrund von historischen Daten vorhergesagt werden, wie viele Fahrzeuge möglicherweise aus Gewohnheit den Stauausweichpfad verwenden, ohne auf den eigentlichen Stau zu reagieren. Dies bedeutet, es wird der Fluss von Fahrzeugen mit berücksichtigt, die sowieso diesen Pfad fahren wollten und nicht vom Stau betroffen sind.
- Auch kann ein Berücksichtigen eines Gütefaktors bei dem Auswerten der Verkehrsdichte vorgesehen werden. Es kann ein fahrzeugspezifischer Gütewert bei dem Auswerten der Verkehrsdichte berücksichtigt werden. Zur Berücksichtigung unterschiedlicher Qualitätsniveaus der eingebauten Sensorsysteme in den kooperativen Fahrzeugen kann zusammen mit dem Verkehrdichtewert ein Fahrzeugspezifischer Gütewert an eine zentrale Einheit, z.B. einen Server, und/oder andere Fahrzeuge übermittelt werden. Auf diese Weise können unterschiedliche technische Sensorstände in den Fahrzeugen berücksichtigt werden. Mit anderen Worten können durch eine fahrzeugspezifischen Gütewert verschiedene Technologiestufen berücksichtigt werden. Falls zu einem späteren Zeitpunkt noch genauere Sensorsysteme zur Verfügung stehen, könnten die Werte solcher Fahrzeuge höher priorisiert sein als die Werte von Fahrzeugen mit älteren oder fehleranfälligeren Systemen. Auf diese Weise wird berücksichtigt, dass neuere Technologien in neuen Fahrzeuge mit einer höheren Messgenauigkeit Parameter ermitteln als ältere Technologien in älteren Fahrzeugen.
- Im folgenden wird die Erfindung und deren Weiterbildungen anhand von beispielhaften Ausführungsbeispielen beschrieben. Die folgenden Figuren sind schematisch und nicht maßstabsgerecht dargestellt.
-
Fig. 1 zeigt ein erstes Ausführungsbeispiel mit einer Stausituation von Fahrzeugen, bei der ein Prognostizieren von mindestens einem Stauparameter stattfindet; und -
Fig. 2 zeigt ein zweites Ausführungsbeispiel mit einer Stausituation, bei der aufgrund einer Prognose von Stauparametern Ausweichpfade zur Umgehung des Staus vorgeschlagen werden. -
Fig. 1 zeigt eine erste Stausituation 10 mit einer Vielzahl von Fahrzeugen 11-22, wobei sich eine erste Gruppe von Fahrzeugen 11-16 in einem Zulaufbereich 31 auf den Stau hin befinden und wobei sich eine zweite Gruppe von Fahrzeugen 17-22 bereits in einem Staubereich 32 befinden. Der Zulaufbereich 31 und der Staubereich 32 sind schematisch dargestellt. In dem Zulaufbereich 31 haben die Fahrzeuge 11-16 noch die Möglichkeit eine höhere Geschwindigkeit zu fahren, während den Fahrzeugen 17-22 im Staubereich 32 durch das langsame Fortbewegen des Staus oder den Stillstand des Staus eine Geschwindigkeit vorgegeben wird. Demnach bewegen sich die Fahrzeuge 11-16 deutlich schneller als die Fahrzeuge 17-22. Für die Fahrzeuge 11-16 im Zulaufbereich 31 ist es nun interessant, etwas über den bevorstehenden Stau und seine Parameter zu erfahren. Ein Stauparameter ist beispielsweise der Ort des Stauanfangs. - Im vorliegenden Beispiel wird aus der Sicht des Fahrzeugs 11 eine beispielhaftes Verfahren zum Prognostizieren von Stauparametern beschrieben. Das Fahrzeug 11, wie auch die Fahrzeuge 12, 15 und 18 sind als kooperative Fahrzeuge ausgebildet. Dies bedeutet, dass sie an einem Verfahren zum Prognostizieren von Stauparametern teilnehmen können. Diese Fahrzeuge 11, 12, 15, 18 sind mit jeweils mindestens einer Erfassungseinheit 41-44 zum Erfassen der Verkehrsdichte ausgestattet, beispielsweise jeweils eine Kamera. Ferner sind diese Fahrzeuge 11, 12, 15, 18 jeweils mit einer Übertragungseinheit 51-54 ausgestattet, die es ermöglicht, die ermittelte Verkehrsdichte und eine dabei ermittelte Position des jeweiligen Fahrzeugs 11, 12, 15, 18 an eine zentrale Auswerteeinheit 60 über eine Übertragungsverbindung 61 zu übermitteln. Die zentrale Auswerteeinheit 60 ist hier als Einheit in einem ortsfesten Servicecenter ausgebildet. Das Servicecenter wird beispielsweise von einem oder mehreren Autoherstellern betrieben und dient als Service für seine Kunden.
- Die kooperativen Fahrzeuge erfassen unabhängig voneinander eine Verkehrsdichte, die in ihrer aktuellen Situation auf der Fahrbahn vorhanden ist. Hierbei erfassen die kooperativen Fahrzeuge auch gleichzeitig ihre aktuelle Position, da die Verkehrsdichte von der Position eines jeden einzelnen Fahrzeugs abhängig ist. So ermittelt beispielsweise das Fahrzeug 12 einen anderen Werte einer Verkehrsdichte als das Fahrzeug 18, das sich bereits im Stau befindet. Da die Verkehrsdichte als Fahrzeuge pro Strecke definiert ist, ermittelt das Fahrzeug 18 kleinere Abstände bis zu seinen Nachbarfahrzeugen als das Fahrzeug 12. Die ermittelte Verkehrsdichte des Fahrzeugs 18 ist demnach höher als die ermittelte Verkehrsdichte des Fahrzeugs 12.
- Das Ermitteln der Verkehrsdichte ist in dem beigefügten Diagramm 70 in der
Fig. 1 gezeigt. Hierbei ist auf der x-Achse die Position x oder der Ort x eines Fahrzeugs angegeben, während auf der y-Achse eine Verkehrsinformation aufgetragen ist. Die markierten Stellen 71, 72, 73, 74 sind die ermittelten Verkehrsdichtewerte der Fahrzeuge 11, 12, 15, 18. Eine gestrichelte Linie deutet eine Korrelation zwischen den ermittelten Verkehrsdichten zu den jeweiligen Fahrzeugen 11, 12, 15, 18 an. Die ermittelten Verkehrsichten 71-74 der kooperativen Fahrzeuge liegen auf einer Näherungskurve 75, die zentral von der Einheit 60 bei der Auswertung der Verkehrsdichten 71-74 ermittelt werden kann. Die Verkehrsdichten 71-74 ergeben sich aus mehreren Messungen eines einzelnen Fahrzeuges, nämlich jeweils einer Messung zu einem benachbarten Fahrzeug, das in Sicht der Karma des ermittelnden Fahrzeugs ist. Hierbei geht die Entfernung zu dem benachbarten Fahrzeug in die Ermittlung ein. Ferner kann eine Gewichtung erfolgen, ob ein benachbartes Fahrzeug vor oder hinter dem eigenen Fahrzeug ermittelt wurde. - Eine ermittelte Verkehrsdichte des eigenen Fahrzeuges berücksichtigt alle benachbarten Fahrzeuge, die mit den installierten Erfassungssystemen des eigenen Fahrzeugs erfassbar sind. Somit ist die Verkehrsdichte eine Zusammenfassung von erfassten Fahrzeugen in der Umgebung des Fahrzeugs, das die Verkehrsdichte ermittelt. Dieser ermittelte Wert der Verkehrsdichte eines einzelnen Fahrzeugs wird als Verkehrsdichte 71-74 verstanden. Ferner können mehrere ermittelte Verkehrsdichten von verschiedenen Fahrzeugen für einen Ort x zusammengefasst werden, beispielsweise von der zentralen Einheit 60, die zeitlich versetzt von mehreren Fahrzeugen mit deren Position einzelne Verkehrsdichten 71-74 sammelt. Der zusammengefasste Wert von einzelnen ermittelte Verkehrsdichten mehrer Fahrzeuge ist dann ein Gesamtwert der Verkehrsdichten oder Gesamt-Verkehrsdichtewert, der von der zentralen Einheit 60 ermittelt wird und kooperativen Fahrzeugen direkt oder indirekt als Information bereitgestellt wird.
- Die ermittelten Verkehrsdichten 71-74 können als relative Zahl angegeben werden, beispielsweise in einem Wertebereich von 0 bis 10, wobei der Wert 0 freie Fahrt bedeutet, ab dem Wert 4 ein Zulauf auf einen Stau vorhanden ist und ab dem Wert 7 eine Stausituation vorhanden ist.
- Das Fahrzeug 11 ermittelt beispielsweise eine Verkehrsdichte des Wertes 4, da es mit einer Rückkamera kein weiteres Fahrzeug erkennt und mit einer Frontkamera das Fahrzeug 12 und das Fahrzeug 13 erkennt. Das Fahrzeug 12 ermittelt beispielsweise eine Verkehrsdichte des Wertes 5, da es mit einer Rückkamera das Fahrzeug 11 erkennt und mit einer Frontkamera die beiden Fahrzeuge 14 und 13 erkennt. Weitere Fahrzeuge in Frontrichtung werden durch die bereits erkannten Fahrzeuge überdeckt und werden nicht erkannt. Das Fahrzeug 15 ermittelt ebenso wie das Fahrzeug 12 beispielsweise eine Verkehrsdichte des Wertes 5, da es mit einer Rückkamera das Fahrzeug 14 und 13 erkennt und mit einer Frontkamera das Fahrzeug 16 erkennt. Das Fahrzeug 15 ermittelt den gleichen Verkehrsdichtewert wie das Fahrzeug 12, mit einer Erfassung von insgesamt drei Fahrzeugen. Das Fahrzeug 18 befindet sich bereits im Verkehrsstau 32 und erfasst vier Fahrzeuge, nämlich Fahrzeuge 17 und 20 mit einer Rückkamera und Fahrzeuge 19 und 22 mit einer Frontkamera. Das Fahrzeug 21 liegt seitlich vom Fahrzeug 18 und könnte mit einer schwenkbaren Kamera erfasst werden. Das Fahrzeug ermittelt einen Verkehrsdichte des Wertes 10, da die Abstände zu den ermittelten Nachbarfahrzeugen gering sind und die Geschwindigkeit des Fahrzeugs 18 Null ist, da es im Staubereich 32 mit seinen Nachbarfahrzeugen steht. Wäre eine Geschwindigkeit des Fahrzeugs 18 vorhanden, so könnte dies in eine Ermittlung der Verkehrsdichte einfließen, so dass sich beispielsweise ein geringerer Wert von 9 ergeben würde.
- Die Ermittlung der Verkehrsdichte geschieht in diesem Beispiel in jedem einzelnen kooperativen Fahrzeug und wird von diesen jeweils zusammen mit der aktuellen Fahrzeugposition, beispielsweise in Form von GPS-Daten, an die Auswerteeinheit 60 übermittelt und dort von einer Erfassungseinheit 62 oder Empfangseinheit 62 empfangen. Dort werden die Daten gesammelt und ein oder mehrere Stauparameter ausgewertet.
- Nach der Auswertung der Verkehrsdichteinformationen kann die Auswerteeinheit 60 mit einer Übertragungseinheit 63 einen oder mehrere Stauparameter den kooperativen Fahrzeugen 11, 12, 15, 18 bereitstellen. Als Stauparameter können hierbei der Ort des Stauendes, der Ort des Stauanfangs, die durchschnittliche Geschwindigkeit in dem Zulaufbereich des Staus 31, die durchschnittliche Geschwindigkeit in dem eigentlichen Staubereich 32 und mögliche Ausweichpfade innerhalb des Stauzulaufbereichs und vor Erreichen des Staubeginns in Frage. Das Interesse für die verschiedenen Stauparameter kann für jedes Fahrzeug verschieden sein. Beispielsweise ist für das Fahrzeug 11 interessant, ob es noch vor dem Erreichen des Stauendes eine Ausweichmöglichkeit auf einer Alternativroute hat. Für das Fahrzeug 18 hingegen ist von Interesse, an welchem Ort der Staubeginn liegt und welche Zeit das Fahrzeug 18 noch benötigt, um den Stau verlassen zu können.
-
Fig. 2 zeigt ein zweites Ausführungsbeispiel mit einer zweiten Stausituation 40, wobei von dem Verkehrsaufkommen mit den Fahrzeugen 11-22 aus dem ersten Ausführungsbeispiel derFig. 1 ausgegangen wird.Fig. 2 zeigt eine Verkehrssituation, die zeitlich nach der Situation derFig. 1 folgt. Hierbei ist Fahrzeug 16 bereits auf den Stau aufgefahren und bildet nun das Stauende im Bereich 32. Die beiden Fahrzeuge 19 und 32 bilden nach wie vor den Stauanfang im Bereich 32. Das kooperative Fahrzeug 15 befindet sich noch im Zulaufbereich 31 des Staus, kann aber auf keine alternative Route geführt werden, da kein Abzweig für einen Stauausweichpfad in Fahrtrichtung voraus vorhanden ist. Über die zentrale Einzeit 60 wird nun das Fahrzeug 15 vor dem Stau gewarnt, um zu verhindern, dass es sich mit hoher Geschwindigkeit dem Stauende nähert. Die zentrale Einheit 60 übermittelt dem Fahrzeug 15 eine Relativposition des Staus, beispielsweise in 500 Metern Stau in Bezug auf die derzeitige Position des Fahrzeugs 15. Ferner übermittelt die zentrale Einheit 60 dem Fahrzeug 15, dass es in etwa 11 Sekunden das Stauende erreichen wird. - Die Situation für die kooperativen Fahrzeuge 11 und 12 unterscheiden sich in
Fig. 2 von der Situation des kooperativen Fahrzeugs 15. Für die beiden Fahrzeuge 11, 12 ergibt sich noch eine Ausweichmöglichkeit zur Vermeidung des Staus. Ein Stauausweichpfad 80 befindet sich in Fahrtrichtung der beiden Fahrzeuge 11 und 12. Die zentrale Einheit 60 berechnet jeweils für die Fahrzeuge 11 und 12 unter Berücksichtung jeweils ihrer Fahrtziele, ob der Stauausweichpfad 80 geeignet ist, um schneller an das gewünschte Ziel zu gelangen. - Für das Fahrzeug 12 ist der Stauausweichpfad 80 ungünstig, da die zentrale Einheit 60 historische Daten bei der Ermittlung der Verkehrsdichte für diesen Stauausweichpfad 80 und eine nachfolgende notwendige Route 81 für das Fahrzeug 12 berücksichtigt hat. Die zentrale Einheit 60 kommt zu dem Ergebnis, dass bei der nun vorliegenden Tageszeit für das Fahrzeug 12 zeitlich günstiger ist, den Stauausweichpfad nicht zu verwenden, da auf diesem sich ebenso mit einer hohen Wahrscheinlichkeit ein Stau bildet wie im Staubereich 32, der jedoch wesentlich länger ist als der Stau des Staubereichs 32.
- Die Situation der
Fig. 2 ist für das Fahrzeug 11 anders als für das Fahrzeug 12. Das Fahrzeug 12 hat eine anderes Fahrziel als das Fahrzeug 12. Nach Vorschlag der zentralen Einheit 60 kann es den Stauausweichpfad 80 fahren, da sich danach eine andere Fahrtroute 82 ergibt. Diese Fahrtroute 82 führt nicht wie bei Fahrzeug 12 in einen weiteren Stau, sondern in eine staufreie Strasse, die zur gegebenen Uhrzeit wenig befahren ist. Fahrzeug 12 könnte diese Strasse zwar auch verwenden, würde aber zu große Umwege nehmen müssen, die längere Zeit in Anspruch nehmen würden, als den Stau des Bereichs 32 zu durchfahren. - Insgesamt ist eine genauere Prognose der zukünftigen Stauposition möglich, da die Verkehrsdichte zur Beurteilung der Verkehrssituation und deren Entwicklung herangezogen wird. Das Prinzip der vernetzten Fahrzeuge oder kooperativen Fahrzeuge, auch Floating Car Data (=FCD) genannt, kann mit der vorgestellten Vorgehensweise verbessert werden.
Claims (7)
- Verfahren zum Prognostizieren von mindestens einem Stauparameter, aufweisend- Ermitteln einer Verkehrsdichte (71-74) mit einer Erfassungseinheit (41-44) eines kooperativen Fahrzeugs (11, 12, 15, 18);- Erfassen einer aktuellen Position (x) des kooperativen Fahrzeugs (11, 12, 15, 18), die bei der Erfassung der Verkehrsdichte (71-74) vorhanden ist;- Übermitteln der Verkehrsdichte (71-74) und der aktuellen Position (x) an eine Auswerteeinheit (60);- Auswerten der Verkehrsdichte (71-74) mit der Auswerteeinheit; und- Bereitstellen des mindestens einen Stauparameters mit der Auswerteeinheit,wobei historische Daten bei dem Auswerten der Verkehrsdichte (71-74) berücksichtigt werden, wobei ein aktueller zeitlicher Verlauf mit geeigneten historischen Zeitverläufen verglichen wird,
dadurch gekennzeichnet, dass bei einer gleichmäßigen Abweichung zwischen den aktuellen und den historischen Daten ein zeitlicher Verlauf einer aktuellen Situation durch Hinzufügen eines konstanten Wertes auf die historischen Daten extrapoliert wird. - Verfahren nach Anspruch 1, wobei der Stauparameter eine Position eines Stauanfangs und/oder Stauendes ist.
- Verfahren nach Anspruch 1 oder Anspruch 2, wobei das Erfassen der Verkehrsdichte (71-74) in einem Zulaufbereich (31) eines Verkehrsstaus durchgeführt wird.
- Verfahren nach einem der Ansprüche 1 bis 3, ferner aufweisend Berücksichtigen von mindestens einem Zuflussparameter bei dem Auswerten der Verkehrsdichte (71-74).
- Verfahren nach einem der Ansprüche 1 bis 4, ferner aufweisend Gewichten eines möglichen Stauausweichpfades (80) mit einer Wahrscheinlichkeit bei dem Auswerten der Verkehrsdichte (71-74).
- Verfahren nach einem der Ansprüche 1 bis 5, ferner aufweisend Berücksichtigen eines fahrzeugspezifischen Gütewerts bei dem Auswerten der Verkehrsdichte (71-74).
- Auswertesystem zum Prognostizieren von mindestens einem Stauparameter, aufweisend- ein kooperatives Fahrzeug (11, 12, 15, 18) zum Bereitstellen einer Verkehrsdichte (71-74);- eine Auswerteeinheit (60) zum Auswerten der Verkehrsdichte (71-74); und- eine Übertragungsverbindung (61) von dem kooperativen Fahrzeug (11, 12, 15, 18) zu der Auswerteeinheit (60) und eine Übertragungsverbindung von der Auswerteeinheit (60) zu dem kooperativen Fahrzeug (11, 12, 15, 18), wobei- das kooperative Fahrzeug (11, 12, 15, 18) eine Erfassungseinheit (41-44) zum Ermitteln der Verkehrsdichte (71-74) und einer aktuellen Position des kooperativen Fahrzeugs (11, 12, 15, 18), die bei der Erfassung der Verkehrsdichte (71-74) vorhanden ist, und eine Übertragungseinheit (51-54) zum Übermitteln der Verkehrsdichte (71-74) und der aktuellen Position (x) über die Übertragungsverbindung an die Auswerteeinheit (60) aufweist, wobei- die Auswerteeinheit (60) eine Empfangseinheit (62) aufweist, welche dazu ausgelegt ist, die Verkehrsdichte (71-74) und die aktuelle Position (x) des kooperativen Fahrzeugs (11, 12, 15, 18) zu empfangen, wobei- mit der Auswerteeinheit (60) die Verkehrsdichte (71-74) auswertbar ist; und wobei- mit der Auswerteeinheit (60) mindestens ein Stauparameter bereitstellbar ist,wobei die Auswerteeinheit dazu ausgelegt ist, die Verkehrsdichte (71-74) anhand historischer Daten auszuwerten, wobei die Auswerteeinheit ferner dazu ausgelegt ist, einen aktuellen zeitlichen Verlauf mit geeigneten historischen Zeitverläufen zu vergleichen,
dadurch gekennzeichnet, dass bei einer gleichmäßigen Abweichung zwischen den aktuellen und den historischen Daten die Auswerteeinheit ferner dazu ausgelegt ist, einen zeitlichen Verlauf einer aktuellen Situation durch Hinzufügen eines konstanten Wertes auf die historischen Daten zu extrapolieren.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102013014872.3A DE102013014872A1 (de) | 2013-09-06 | 2013-09-06 | Verfahren, Auswertesystem und kooperatives Fahrzeug zum Prognostizieren von mindestens einem Stauparameter |
| PCT/EP2014/002401 WO2015032499A1 (de) | 2013-09-06 | 2014-09-04 | Verfahren, auswertesystem und fahrzeug zum prognostizieren von mindestens einem stauparameter |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP3042368A1 EP3042368A1 (de) | 2016-07-13 |
| EP3042368B1 true EP3042368B1 (de) | 2017-06-21 |
Family
ID=51494262
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP14761580.1A Not-in-force EP3042368B1 (de) | 2013-09-06 | 2014-09-04 | Verfahren, auswertesystem und fahrzeug zum prognostizieren von mindestens einem stauparameter |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9805594B2 (de) |
| EP (1) | EP3042368B1 (de) |
| CN (1) | CN105474285B (de) |
| DE (1) | DE102013014872A1 (de) |
| WO (1) | WO2015032499A1 (de) |
Families Citing this family (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015052953A1 (ja) * | 2013-10-08 | 2015-04-16 | 日本電気株式会社 | 車両誘導システム、車両誘導方法、管理装置およびその制御方法 |
| DE102015203233A1 (de) * | 2015-02-24 | 2016-08-25 | Bayerische Motoren Werke Aktiengesellschaft | Server, System und Verfahren zur Bestimmung einer Position eines Stauendes |
| US9576481B2 (en) | 2015-04-30 | 2017-02-21 | Here Global B.V. | Method and system for intelligent traffic jam detection |
| DE102015217792B4 (de) * | 2015-09-17 | 2022-07-14 | Volkswagen Aktiengesellschaft | Vorrichtung, Verfahren und Computerprogramm zum Bereitstellen von Information über ein Stauende über eine Fahrzeug-zu-Fahrzeug-Schnittstelle |
| DE102015217793A1 (de) * | 2015-09-17 | 2017-03-23 | Volkswagen Aktiengesellschaft | Vorrichtung, Verfahren und Computerprogramm zum Bereitstellen von Stauinformation über eine Fahrzeug-zu-Fahrzeug-Schnittstelle |
| EP3236446B1 (de) | 2016-04-22 | 2022-04-13 | Volvo Car Corporation | Anordnung und verfahren zur bereitstellung anpassung der warteschlangenlänge für verkehrsampelassistenzanwendungen |
| US9965950B2 (en) * | 2016-06-03 | 2018-05-08 | Here Global B.V. | Method and apparatus for classifying a traffic jam from probe data |
| US10043385B2 (en) * | 2016-06-06 | 2018-08-07 | United States Cellular Corporation | Configuring traffic control device switch timing intervals using mobile wireless device-provided traffic information |
| CN107578632A (zh) * | 2016-07-05 | 2018-01-12 | 奥迪股份公司 | 交通密度检测系统、交通工具及方法 |
| US10908607B2 (en) * | 2017-11-30 | 2021-02-02 | Ford Global Technologies, Llc | Enhanced traffic jam assist |
| US10599929B2 (en) * | 2018-01-04 | 2020-03-24 | Motionloft, Inc. | Event monitoring with object detection systems |
| CN108615408A (zh) * | 2018-04-09 | 2018-10-02 | 谷坤明 | 一种基于距离传感器以及物联网技术的智能行车辅助系统 |
| CN108399778A (zh) * | 2018-05-08 | 2018-08-14 | 深圳市易成自动驾驶技术有限公司 | 群体智能拥堵提示方法、系统及计算机可读存储介质 |
| DE102018213378B4 (de) * | 2018-08-09 | 2021-01-28 | Bayerische Motoren Werke Aktiengesellschaft | Fahrassistenzsystem für ein Fahrzeug, Fahrzeug mit demselben und Fahrassistenzverfahren für ein Fahrzeug |
| JP7131433B2 (ja) * | 2019-02-26 | 2022-09-06 | トヨタ自動車株式会社 | 車載用情報処理装置、車両間情報処理システム、及び情報処理システム |
| CN110288824B (zh) * | 2019-05-20 | 2020-12-01 | 浙江工业大学 | 基于Granger causality路网早晚高峰拥堵状况和传播机制分析方法 |
| US11488470B2 (en) | 2020-11-06 | 2022-11-01 | Imam Abdulrahman Bin Faisal University | System and method for real-time assessment of traffic stream flow characteristics |
| DE102021201063B4 (de) | 2021-02-04 | 2024-07-11 | Volkswagen Aktiengesellschaft | Verfahren zum Betreiben eines Systems für ein zumindest teilweise assistiert betriebenes Kraftfahrzeug, Computerprogrammprodukt sowie System |
| US11749108B2 (en) * | 2021-03-31 | 2023-09-05 | Honda Motor Co., Ltd. | System and method for lane level traffic state estimation |
| US12230129B2 (en) * | 2021-10-28 | 2025-02-18 | Toyota Motor Engineering & Manufacturing North America, Inc. | Monitoring a traffic condition of stopped or slow moving vehicles |
| KR20230085697A (ko) * | 2021-12-07 | 2023-06-14 | 현대자동차주식회사 | 차량 제어 장치, 및 그를 이용한 차량 제어 방법 |
| US20230230471A1 (en) * | 2022-01-14 | 2023-07-20 | Toyota Motor Engineering & Manufacturing North America, Inc. | Cooperative traffic congestion detection for connected vehicular platform |
| US12272237B2 (en) * | 2022-12-27 | 2025-04-08 | Itron, Inc. | Pedestrian and vehicle congestion relief system |
| CN117315934A (zh) * | 2023-09-25 | 2023-12-29 | 阜阳交通能源投资有限公司 | 基于无人机的高速公路车流量实时监测及拥堵预测系统 |
| CN120840643A (zh) | 2024-04-28 | 2025-10-28 | 通用汽车环球科技运作有限责任公司 | 确定交通拥堵情况下的最优车辆操纵计划 |
Family Cites Families (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0908861A3 (de) * | 1997-09-16 | 2000-08-23 | Siemens Aktiengesellschaft | Verfahren zur Ermittlung von Verkehrsinformationen |
| DE10036789A1 (de) * | 2000-07-28 | 2002-02-07 | Daimler Chrysler Ag | Verfahren zur Bestimmung des Verkehrszustands in einem Verkehrsnetz mit effektiven Engstellen |
| DE10043797A1 (de) | 2000-09-06 | 2002-03-28 | Daimler Chrysler Ag | Integriertes Verkehrsüberwachungssystem |
| DE10057796B4 (de) * | 2000-11-22 | 2007-12-27 | Daimlerchrysler Ag | Verfahren zur fahrzeugindividuellen Verkehrszustandsprognose |
| DE10062856B4 (de) | 2000-12-16 | 2008-01-10 | Daimlerchrysler Ag | Verfahren zur fahrzeugindividuellen Verkehrsprognose |
| DE10063763A1 (de) * | 2000-12-21 | 2002-07-25 | Daimler Chrysler Ag | Verfahren und Vorrichtung zur Erzeugung und Ausgabe von streckenbezogenen Routeninformationen |
| US7698055B2 (en) | 2004-11-16 | 2010-04-13 | Microsoft Corporation | Traffic forecasting employing modeling and analysis of probabilistic interdependencies and contextual data |
| DE102006001354A1 (de) | 2006-01-11 | 2007-07-12 | Daimlerchrysler Ag | Verfahren zur prognosegestützten Stauüberwachung in einem Fahrzeug |
| DE102006004130B4 (de) * | 2006-01-27 | 2012-02-16 | Audi Ag | Verfahren zur Bestimmung eines zukünftigen Straßenverlaufs durch Kommunikaiton zwischen Kraftfahrzeugen |
| DE502007005096D1 (de) | 2006-10-25 | 2010-10-28 | Continental Teves Ag & Co Ohg | Aufbau von kommunikationsverbindungen zwischen fahrzeugen |
| DE102007050154A1 (de) | 2007-10-19 | 2009-04-23 | Siemens Ag | Prognosesystem zum Vorhersagen von Fahrzeiten, fahrzeuggestütztes Routenplanungssystem, Verkehrsinformationssystem und -verfahren |
| DE102008003039A1 (de) | 2008-01-02 | 2009-07-09 | Daimler Ag | Verfahren zur Verkehrszustandsbestimmung in einem Fahrzeug |
| CN101290713A (zh) | 2008-07-11 | 2008-10-22 | 浙江工业大学 | 一种结合周相似特性的分形交通流预测方法 |
| CN101325004B (zh) * | 2008-08-01 | 2011-10-05 | 北京航空航天大学 | 一种实时交通信息的数据补偿方法 |
| EP2166524B1 (de) * | 2008-09-17 | 2016-03-30 | Harman Becker Automotive Systems GmbH | Verfahren zur Anzeige der Verkehrsdichtheitsinformation |
| DE102009008745B4 (de) | 2009-02-12 | 2020-12-24 | Volkswagen Ag | Verfahren und System zur automatischen Verkehrsführung |
| CN101694743B (zh) | 2009-08-25 | 2011-09-21 | 北京世纪高通科技有限公司 | 预测路况的方法和装置 |
| DE102009029531A1 (de) * | 2009-09-17 | 2011-03-24 | Robert Bosch Gmbh | Einschätzung der Straßenverkehrsdichte bei Kraftfahrzeugen |
| DE102011083677A1 (de) * | 2011-09-29 | 2013-04-04 | Bayerische Motoren Werke Aktiengesellschaft | Prognose einer Verkehrssituation für ein Fahrzeug |
| DE102012009822A1 (de) * | 2012-05-18 | 2012-11-29 | Daimler Ag | Verfahren zur Ermittlung einer Größe zur Beschreibung eines lokalenVerkehrs |
-
2013
- 2013-09-06 DE DE102013014872.3A patent/DE102013014872A1/de not_active Withdrawn
-
2014
- 2014-09-04 CN CN201480045735.4A patent/CN105474285B/zh not_active Expired - Fee Related
- 2014-09-04 EP EP14761580.1A patent/EP3042368B1/de not_active Not-in-force
- 2014-09-04 WO PCT/EP2014/002401 patent/WO2015032499A1/de not_active Ceased
- 2014-09-04 US US14/917,159 patent/US9805594B2/en not_active Expired - Fee Related
Non-Patent Citations (1)
| Title |
|---|
| None * |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2015032499A1 (de) | 2015-03-12 |
| US9805594B2 (en) | 2017-10-31 |
| CN105474285A (zh) | 2016-04-06 |
| DE102013014872A1 (de) | 2015-03-12 |
| EP3042368A1 (de) | 2016-07-13 |
| US20160210852A1 (en) | 2016-07-21 |
| CN105474285B (zh) | 2017-09-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3042368B1 (de) | Verfahren, auswertesystem und fahrzeug zum prognostizieren von mindestens einem stauparameter | |
| DE102012213048B4 (de) | Vorrichtung zum Aktualisieren einer Fahrzeitabschätzung | |
| EP2826031B1 (de) | Verfahren zur stauerkennung mittels einer drahtlosen fahrzeug-zu-fahrzeug-kommunikation | |
| EP1695317B1 (de) | Verkehrszustandserkennung mit einem schwellenwertverfahren | |
| DE69917543T2 (de) | Verkehrsinformationübermittlungssystem | |
| DE102012212681B4 (de) | Autonome Konvoitechnik für Fahrzeuge | |
| DE102007037920B4 (de) | Verkehrszustands-Vorhersagevorrichtung | |
| DE102015202367A1 (de) | Autonome steuerung in einer dichten fahrzeugumgebung | |
| EP2460337B1 (de) | Verfahren und vorrichtung zur kommunikation mit einem anderen fahrzeug oder mit einer infrastruktureinrichtung | |
| DE102012201472A1 (de) | Verfahren zur Bereitstellung von Parkinformationen zu freien Parkplätzen | |
| DE102017110683A1 (de) | Strassenranddienstleistungsschätzungen basierend auf funkfahrzeugdaten | |
| DE112006003060T5 (de) | System und Verfahren zum Aktualisieren von Verkehrsdaten unter Verwendung von Sondenfahrzeugen mit Aussensensoren | |
| EP2856452A1 (de) | Erkennung von richtungsfahrbahnen | |
| WO2019073007A1 (de) | Verfahren und system zur ermittlung von effektiven windgeschwindigkeiten für kraftfahrzeuge | |
| EP2116981B1 (de) | Verfahren und Vorrichtung zur Ermittlung von Rückstaulängen an Lichtsignalanlagen | |
| EP2662846A1 (de) | Verfahren zum Reduzieren einer Staugefahr | |
| EP1466140B1 (de) | Verfahren zum bestimmen einer reisezeit | |
| DE112011103239T5 (de) | Systeme und Verfahren zum Abschätzen des örtlichen Verkehrsflusses | |
| DE102013001120A1 (de) | Verfahren zum Betreiben von Kraftfahrzeugen, die über eine Fahrzeug-zu-Fahrzeug-Kommunikation verbunden sind | |
| DE102021114717A1 (de) | Steuerung von fahrzeug-zu-infrastruktur-kommunikation | |
| DE102012009822A1 (de) | Verfahren zur Ermittlung einer Größe zur Beschreibung eines lokalenVerkehrs | |
| DE102012024166A1 (de) | Warnen eines Fahrers eines Kraftfahrzeugs vor einer Staufront mit Hilfe einer korrigierten Prognosefunktion | |
| DE602006000904T2 (de) | System zur Detektion von Fahrzeugverkehr mittels bordeigener telematischer Kooperationsplattform basierend auf erweiterten Stichprobenfahrzeugdaten | |
| DE102005009604B4 (de) | Verfahren und Vorrichtung zum Erzeugen eines Bewertungswertes für Verkehrsdaten | |
| EP4287157A1 (de) | Verfahren zur ermittlung oder zur zuordnung einer fahrspurinformation bezüglich mehrerer sich auf einem streckenabschnitt befindender verkehrsteilnehmer, telekommunikationsnetz oder system, verkehrsteilnehmer, computerprogramm und computerlesbares medium |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 20160406 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| RIN1 | Information on inventor provided before grant (corrected) |
Inventor name: LORENZ, STEPHAN Inventor name: LACKO, TILMAN Inventor name: BUCHHOLZ, JAN |
|
| DAX | Request for extension of the european patent (deleted) | ||
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| INTG | Intention to grant announced |
Effective date: 20170406 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 903571 Country of ref document: AT Kind code of ref document: T Effective date: 20170715 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502014004357 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 4 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20170621 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170621 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170921 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170621 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170621 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170922 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170621 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170621 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170921 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170621 Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170621 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170621 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170621 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170621 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170621 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170621 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170621 Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170621 Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170621 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20171021 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 502014004357 Country of ref document: DE |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170621 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| 26N | No opposition filed |
Effective date: 20180322 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170621 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: MM4A |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20170930 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170904 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170930 Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170930 Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170904 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170621 Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170930 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 5 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170621 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20140904 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170621 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170621 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170621 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170621 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170621 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MM01 Ref document number: 903571 Country of ref document: AT Kind code of ref document: T Effective date: 20190904 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190904 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20220930 Year of fee payment: 9 |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Effective date: 20230530 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20230920 Year of fee payment: 10 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20230922 Year of fee payment: 10 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R119 Ref document number: 502014004357 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20240403 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20240904 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20240904 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20240930 |