EP3042368B1 - Procede, systeme d'evaluation et vehicule pour anticiper au moins un parametre d'un bouchon - Google Patents
Procede, systeme d'evaluation et vehicule pour anticiper au moins un parametre d'un bouchon Download PDFInfo
- Publication number
- EP3042368B1 EP3042368B1 EP14761580.1A EP14761580A EP3042368B1 EP 3042368 B1 EP3042368 B1 EP 3042368B1 EP 14761580 A EP14761580 A EP 14761580A EP 3042368 B1 EP3042368 B1 EP 3042368B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- traffic
- vehicle
- traffic density
- vehicles
- evaluation unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Not-in-force
Links
Images

Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/0104—Measuring and analyzing of parameters relative to traffic conditions
- G08G1/0125—Traffic data processing
- G08G1/0133—Traffic data processing for classifying traffic situation
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/0104—Measuring and analyzing of parameters relative to traffic conditions
- G08G1/0108—Measuring and analyzing of parameters relative to traffic conditions based on the source of data
- G08G1/0112—Measuring and analyzing of parameters relative to traffic conditions based on the source of data from the vehicle, e.g. floating car data [FCD]
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/0104—Measuring and analyzing of parameters relative to traffic conditions
- G08G1/0125—Traffic data processing
- G08G1/0129—Traffic data processing for creating historical data or processing based on historical data
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/0104—Measuring and analyzing of parameters relative to traffic conditions
- G08G1/0137—Measuring and analyzing of parameters relative to traffic conditions for specific applications
- G08G1/0141—Measuring and analyzing of parameters relative to traffic conditions for specific applications for traffic information dissemination
Definitions
- the invention relates to the field of vehicle technology and proposes a method, an evaluation system and a cooperative vehicle for predicting at least one congestion parameter.
- a backend-based system architecture such as a server within a communication network, uses motion profiles of the networked vehicles.
- FCD Floating Car Data
- Additional values such as the speed within the traffic jam or the type of traffic flow, can be determined in addition to the current positions of traffic jam and jam end.
- FCD Floating Car Data
- Additional values such as the speed within the traffic jam or the type of traffic flow, can be determined in addition to the current positions of traffic jam and jam end.
- the information obtained can be distributed via an online service using mobile technology to other vehicles. This provision of information makes it possible for networked vehicles to generate a telematic route foresight and to gain knowledge about conditions that are so far impossible to grasp with a local environment perception.
- An important factor for the applicability of the information is the accuracy of the position of the congestion start and the end of the congestion, since these positions directly affect the quality of the congestion forecast and its dependent functions.
- document DE 10 2011 083677 A1 relates to a method for forecasting a traffic situation for a vehicle in which at least one possible future for the traffic situation of the vehicle is determined on the basis of a current state of the vehicle and on the basis of historical data.
- tail ends over a longer time course allows prediction of the tail end development and allows estimation of additional propagation parameters, such as speed and direction, over which the tail end will evolve over time.
- additional propagation parameters such as speed and direction
- the development has progressed so far that one not only wants to detect the presence of a traffic jam, but also dynamic parameters of congestion, such as its speed and the location of the congestion start at a given time.
- An exact prognosis of the developing traffic jam situation is relevant for the further planning of a traffic route. For a vehicle present in the traffic flow, the time of arrival at the traffic jam plays a greater role than the time of detection of the tail end in the backend architecture. However, the previous forecasts are inaccurate to predict a time for arrival at a jam end.
- the invention is therefore based on the object to propose a solution, in which way congestion parameters can be provided more precisely.
- This object is achieved by a method for predicting at least one stagnation parameter according to claim 1.
- detection of a traffic density detection of a current position, which is present when the traffic density is detected, and transmission of the traffic density and the current position to an evaluation unit are provided. Furthermore, the method comprises evaluating the traffic density and providing at least one congestion parameter.
- the evaluation system has an evaluation unit for evaluating a traffic density. Furthermore, the evaluation system has a transmission connection to at least one cooperative vehicle in an inflow area of a traffic jam and a reception unit in order to receive the traffic density and a current position of the cooperative vehicle, wherein the current position of the cooperative vehicle is present in the detection of the traffic density.
- the traffic density can be evaluated with the evaluation unit.
- at least one stagnation parameter can be provided with the evaluation unit.
- the evaluation system indicates a cooperative vehicle for providing traffic density for predicting at least one congestion parameter.
- the cooperative vehicle has at least one transmission connection to an evaluation unit and a detection unit for detecting the traffic density. Further, the cooperative vehicle has a detection unit for detecting the current position that exists in the detection of the traffic density. Furthermore, the cooperative vehicle has a transmission unit for transmitting the traffic density and the current position via the transmission connection to the evaluation unit.
- the invention is based on a prognosis of at least one congestion parameter, wherein a traffic density is evaluated.
- a traffic density is to be understood as meaning a number of vehicles per route.
- vehicles which are equipped as cooperative vehicles have pick-up systems to locate other nearby vehicles.
- recording systems for example, cameras, e.g. a front camera, a rear camera or a swivel camera in or on the vehicle for use.
- radar systems can also be used.
- the cooperative vehicles may record radio communications with other cooperative vehicles. Furthermore, the cooperative vehicles can record radio-contact to permanently installed devices, such as a central evaluation unit or an installed gantry, which collects and transmits traffic data.
- a cooperative vehicle can determine both the distance to other neighboring vehicles as well as their speed. By adjacent vehicles is meant moving or stationary vehicles in the vicinity of the cooperative vehicle. The cooperative vehicle can thus also determine the number of surrounding vehicles and additionally their parameters, such as speed, direction of travel and their current position.
- an environment sensor advantageously with a camera, a front radar and / or a rear radar.
- Using traffic density for congestion forecasting has significant advantages over previously known methods using other parameters.
- a true prognosis can take place, i. forecasting a traffic jam in a forward-looking manner.
- the congestion parameter may be a position of a congestion start and / or tail end.
- These are determined congestion parameters that can be determined by a central evaluation unit or by a cooperative vehicle itself. Since cooperative vehicles can also communicate with each other, parameters for a congestion forecast can be collected by other vehicles and evaluated in their own vehicle. However, it has advantages if this task assumes a central unit, since it has a better overview and / or more computing power than a single cooperative vehicle.
- a value for the traffic volume or traffic density is determined by cooperative vehicles, also called participating vehicles, with the aid of weighted parameters, for example from airspeed, number of vehicles that can be detected with surroundings sensors and distances to these vehicles, number of cooperative vehicles, also called Car2x-capable vehicles, in a given area.
- the more cooperative vehicles participate in forecasting a congestion parameter the more accurate the prognosis can be.
- a traffic density is determined in a cooperative vehicle and transmitted together with its current position via a radio link, e.g. with a Car2x system, distributed to a central unit as an evaluation system, for example a server, and / or to other cooperative vehicles.
- a very accurate traffic density information can be calculated on the central unit.
- the cooperative vehicles can make an early picture of the expected traffic volume.
- the central unit for example a server, can summarize all the information transmitted and has very accurate information about the current traffic flow in a particular area.
- the total density values are composed of the individual traffic density values transmitted from the individual cooperative vehicles to the central unit.
- the traffic density values of the individual vehicles can be provided with a quality factor, for example, to take into account the quality of the transmitted information.
- the quality of the transmitted traffic density value from a cooperative vehicle for example, depends on the detection system used in the cooperative vehicle, the technology stage of the detection system and its model execution.
- the central unit determines an approximation function from the obtained traffic density values of the individual cooperative vehicles. This approximation function shows the traffic over the route. Based on a digital road map, parameters can be used to correct a traffic jam forecast. In this case, information from incoming and outgoing roads can be taken into account, such as motorway junctions. The individual paths, i. the incoming and outgoing roads take into account the direction of the traffic flow and can be weighted with probabilities.
- the detection of the traffic density is carried out in an inflow area of a traffic jam.
- a traffic volume in an inlet on a traffic jam end can be an important indicator for the further development of the traffic jam until the time of the actual arrival of the own vehicle at the traffic jam.
- the course of the traffic volume is advantageously determined from the current own position to the end of the traffic jam.
- With its own position is meant the position of a cooperative vehicle, which would like to prepare for a drive on a jam end.
- a preparation may be in the form of a suggestion for a congestion avoidance route, or information as to when a congestion end is reached.
- An inflow parameter is determined in an inflow area of a traffic jam and is, for example, the speed of the own vehicle, the speed of foreign vehicles, which are still detected, for example, although they are not cooperative vehicles.
- historical data is taken into account in evaluating the traffic density.
- a jam position, i. the beginning and end of a traffic jam can be predicted from the current time history using historical data.
- the current time history with appropriate time histories of the past, such as the same time, the same day of the week, etc., to be compared. If the gradients in the temporally covered area agree, the future congestion development can be predicted based on the time course of the past.
- the timing of the current situation can be increased by adding a constant offset, i. of a constant value, to be extrapolated to the historical record.
- additional traffic information such as accident situation, festive event, etc., can be taken into account and / or a forecast of the resolution of the congestion until the arrival of the own vehicle at the potential end of the congestion can be established on the basis of historical determined decay times.
- weighting of a possible congestion avoidance path may be present with a probability in the traffic density evaluation.
- the calculation of a congestion avoidance path can take into account the desired travel destination of a vehicle, for example on the basis of historical data or due to an input in a navigation device. Furthermore, based on historical data, it can be predicted how many vehicles may habitually use the congestion avoidance path without reacting to the actual congestion. This means that it takes into account the flow of vehicles that wanted to drive this path anyway and are not affected by the traffic jam.
- a vehicle-specific quality value can be taken into account when evaluating the traffic density.
- a vehicle-specific quality value can be transmitted to a central unit, eg a server, and / or other vehicles.
- a central unit eg a server
- different technical sensor levels can be considered in the vehicles.
- different technology levels can be taken into account by means of a vehicle-specific quality value. If even more accurate sensor systems are available at a later date, the values of such vehicles could be prioritized higher than the values of vehicles with older or more fault-prone systems. In this way it is taken into account that newer technologies in new vehicles with higher accuracy measure parameters than older technologies in older vehicles.
- Fig. 1 shows a first congestion situation 10 with a plurality of vehicles 11-22, wherein a first group of vehicles 11-16 are located in an inlet area 31 on the congestion and wherein a second group of vehicles 17-22 are already in a storage area 32 ,
- the inlet area 31 and the storage area 32 are shown schematically.
- the vehicles 11-16 still have the opportunity to drive a higher speed, while the vehicles 17-22 in the storage area 32 by the slow movement of the congestion or the stoppage of the congestion speed is set. Accordingly, the vehicles 11-16 move much faster than the vehicles 17-22.
- a congestion parameter is, for example, the location of the congestion start.
- an exemplary method for forecasting congestion parameters is described from the perspective of the vehicle 11.
- the vehicle 11, as well as the vehicles 12, 15 and 18 are designed as cooperative vehicles. This means that they can participate in a procedure for predicting congestion parameters.
- These vehicles 11, 12, 15, 18 are each equipped with at least one detection unit 41-44 for detecting the traffic density, for example in each case a camera.
- these vehicles 11, 12, 15, 18 are each equipped with a transmission unit 51-54, which makes it possible to determine the determined traffic density and a thereby determined position of the respective vehicle 11, 12, 15, 18 to a central evaluation unit 60 via a transmission link 61 to submit.
- the central evaluation unit 60 is embodied here as a unit in a fixed service center.
- the service center is operated by one or more automakers and serves as a service to its customers.
- the cooperative vehicles independently detect a traffic density that exists in their current situation on the road. At the same time, the cooperative vehicles also record their current position at the same time, since the traffic density depends on the position of each individual vehicle. For example, the vehicle 12 determines a different level of traffic density than the vehicle 18 that is already in traffic. Since the traffic density is defined as vehicles per route, the vehicle 18 determines smaller distances to its neighboring vehicles than the vehicle 12. The determined traffic density of the vehicle 18 is therefore higher than the determined traffic density of the vehicle 12.
- the determination of the traffic density is shown in the attached diagram 70 in FIG Fig. 1 shown.
- the position x or the location x of a vehicle is indicated on the x-axis, while traffic information is plotted on the y-axis.
- the marked locations 71, 72, 73, 74 are the determined traffic density values of the vehicles 11, 12, 15, 18.
- a dashed line indicates a correlation between the determined traffic densities to the respective vehicles 11, 12, 15, 18.
- the determined traffic views 71-74 of the cooperative vehicles lie on an approximate curve 75, which can be determined centrally by the unit 60 in the evaluation of the traffic densities 71-74.
- the traffic densities 71-74 result from several measurements of a single vehicle, namely one measurement each to an adjacent vehicle, in the view of the karma of the determining vehicle is. In this case, the distance to the adjacent vehicle enters into the determination. Furthermore, a weighting can be carried out as to whether an adjacent vehicle was determined in front of or behind the own vehicle.
- a determined traffic density of the own vehicle takes into account all neighboring vehicles that can be detected with the installed detection systems of the own vehicle.
- the traffic density is a summary of detected vehicles in the vicinity of the vehicle, which determines the traffic density.
- This determined value of the traffic density of a single vehicle is understood as traffic density 71-74.
- several determined traffic densities of different vehicles for a location x can be summarized, for example, by the central unit 60, which collects temporally offset from several vehicles with their position individual traffic densities 71-74.
- the aggregated value of individual determined traffic densities of multiple vehicles is then a total value of the traffic densities or total traffic density value determined by the central unit 60 and provided to cooperative vehicles directly or indirectly as information.
- the determined traffic densities 71-74 can be specified as a relative number, for example in a value range from 0 to 10, where the value 0 means free travel, from the value 4 there is an intake to a traffic jam and from the value 7 a traffic jam situation exists ,
- the vehicle 11 determines, for example, a traffic density of the value 4, since it does not recognize a further vehicle with a rear camera and recognizes the vehicle 12 and the vehicle 13 with a front camera.
- the vehicle 12 determines, for example, a traffic density of the value 5, since it recognizes the vehicle 11 with a rear camera and recognizes the two vehicles 14 and 13 with a front camera. Other vehicles in front direction are covered by the already detected vehicles and are not recognized.
- the vehicle 15 determines, like the vehicle 12, for example, a traffic density of the value 5, since it recognizes the vehicle 14 and 13 with a rear camera and recognizes the vehicle 16 with a front camera.
- the vehicle 15 determines the same traffic density value as the vehicle 12, with a total of three vehicles.
- the vehicle 18 is already in the traffic jam 32 and detects four vehicles, namely vehicles 17 and 20 with a rear camera and vehicles 19 and 22 with a front camera.
- the vehicle 21 is located laterally from the vehicle 18 and could be detected with a swivel camera.
- the vehicle determines a traffic density of the value 10, since the distances to the determined neighboring vehicles are low and the speed of the vehicle 18 is zero, since it is in the storage area 32 with its neighboring vehicles. If a speed of the vehicle 18 were present, this could be incorporated into a determination of the traffic density, so that, for example, a lower value of 9 would result.
- the determination of the traffic density in this example takes place in each individual cooperative vehicle and is transmitted by the latter together with the current vehicle position, for example in the form of GPS data, to the evaluation unit 60 and received there by a detection unit 62 or reception unit 62. There, the data is collected and evaluated one or more stagnation parameters.
- the evaluation unit 60 with a transmission unit 63 can provide one or more congestion parameters to the cooperative vehicles 11, 12, 15, 18.
- the stagnation parameters may be the location of the end of the stagnation, the location of the congestion start, the average speed in the inlet area of the congestion 31, the average speed in the actual stowage area 32 and possible escape paths within the congestion inflow area and before reaching the start of the dust.
- the interest in the various stowage parameters may vary for each vehicle. For example, it is interesting for the vehicle 11 whether it has an alternative option on an alternative route before reaching the end of the jam. For the vehicle 18, on the other hand, it is of interest at which point the start of the dust lies and what time the vehicle 18 still needs to be able to leave the traffic jam.
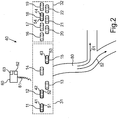
- Fig. 2 shows a second embodiment with a second congestion situation 40, wherein the traffic volume with the vehicles 11-22 from the first embodiment of the Fig. 1 is assumed.
- Fig. 2 shows a traffic situation, which depends on the time of the situation Fig. 1 follows.
- the vehicle 16 has already traveled to the traffic jam and now forms the end of the jam in the area 32.
- the two vehicles 19 and 32 continue to form the beginning of the jam in the area 32.
- the cooperative vehicle 15 is still in the inlet area 31 of the jam, but can no alternative route to be performed because there is no branch for a congestion avoidance path in the direction ahead.
- About the central time 60 is now the vehicle 15th warned against congestion to prevent it from approaching the end of the jam at high speed.
- the central unit 60 communicates to the vehicle 15 a relative position of congestion, for example in 500 meters of traffic jam, with respect to the current position of the vehicle 15. Further, the central unit 60 transmits to the vehicle 15 that it will reach the jam end in about 11 seconds.
- a jam avoidance path 80 is located in the direction of travel of the two vehicles 11 and 12.
- the central unit 60 calculates for each of the vehicles 11 and 12, taking into account their respective destinations, whether the congestion avoidance path 80 is suitable to reach the desired destination more quickly.
- the jam avoidance path 80 is unfavorable because the central unit 60 has taken into account historical data in determining the traffic density for this congestion avoidance path 80 and a subsequent necessary route 81 for the vehicle 12.
- the central unit 60 comes to the conclusion that at the time of day now available for the vehicle 12 is more convenient not to use the congestion avoidance path, as well as a congestion forms there with a high probability as in the storage area 32, but much longer is the jam of the storage area 32.
- the situation of Fig. 2 is different for the vehicle 11 than for the vehicle 12.
- the vehicle 12 has a different destination than the vehicle 12.
- the central unit 60 it can drive the congestion avoidance path 80, since then results in a different route 82.
- This route does not lead, as in the case of vehicle 12, into a further traffic jam, but into a traffic jam-free road, which is not very busy at the given time.
- vehicle 12 could also use this road, it would have to take too much detours, which would take a longer time than to pass through the congestion of area 32.
- FCD Floating Car Data
Landscapes
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Traffic Control Systems (AREA)
Claims (7)
- Procédé pour pronostiquer au moins un paramètre de bouchon, comportant :- détermination d'une densité de circulation (71-74) avec une unité de détection (41-44) d'un véhicule coopératif (11, 12, 15,18) ;- détection d'une position actuelle (x), existante lors de la détection de la densité de circulation (71-74), du véhicule coopératif (11, 12, 15, 18) ;- transmission de la densité de circulation (71-74) et de la position actuelle (x) à une unité d'évaluation (60) ;- évaluation de la densité de circulation (71-74) avec l'unité d'évaluation ; et- fourniture de l'au moins un paramètre de bouchon avec l'unité d'évaluation,dans lequel des données historiques sont prises en compte lors de l'évaluation de la densité de circulation (71-74), une courbe temporelle actuelle étant comparée à des courbes temporelles historiques appropriées,
caractérisé en ce que, en présence d'un écart régulier entre les données actuelles et les données historiques, une courbe temporelle d'une situation actuelle est extrapolée par l'ajout d'une valeur constante aux données historiques. - Procédé selon la revendication 1, dans lequel le paramètre de bouchon est une position d'un début de bouchon et/ou d'une fin de bouchon.
- Procédé selon la revendication 1 ou 2, dans lequel la détection de la densité de circulation (71-74) est effectuée dans une zone d'arrivée (31) d'un bouchon de circulation.
- Procédé selon l'une des revendications 1 à 3, comportant en outre la prise en compte d'au moins un paramètre d'afflux lors de l'évaluation de la densité de circulation (71-74).
- Procédé selon l'une des revendications 1 à 4, comportant en outre la pondération d'un possible trajet d'évitement de bouchon (80) avec une probabilité lors de l'évaluation de la densité de circulation (71-74).
- Procédé selon l'une des revendications 1 à 5, comportant en outre la prise en compte d'une valeur de qualité spécifique au véhicule lors de l'évaluation de la densité de circulation (71-74).
- Système d'évaluation pour pronostiquer au moins un paramètre de bouchon, comportant :- un véhicule coopératif (11, 12, 15, 18) pour fournir une densité de circulation (71-74) ;- une unité d'évaluation (60) pour évaluer la densité de circulation (71-74) ; et- une liaison de transmission (61) du véhicule coopératif (11, 12, 15, 18) à l'unité d'évaluation (60) et une liaison de transmission de l'unité d'évaluation (60) au véhicule coopératif (11, 12, 15, 18),- dans lequel le véhicule coopératif (11, 12, 15, 18) comporte une unité de détection (41-44) pour déterminer la densité de circulation (71-74) et une position actuelle, existante lors de la détection de la densité de circulation (71-74), du véhicule coopératif (11, 12, 15, 18) et une unité de transmission (51-54) pour transmettre la densité de circulation (71-74) et la position actuelle (x) à l'unité d'évaluation (60) par l'intermédiaire de la liaison de transmission,- dans lequel l'unité d'évaluation (60) comporte une unité de réception (62) qui est conçue pour recevoir la densité de circulation (71-74) et la position actuelle (x) du véhicule coopératif (11, 12, 15, 18),- dans lequel la densité de circulation (71-74) peut être évaluée avec l'unité d'évaluation (60) ; et- dans lequel au moins un paramètre de bouchon peut être fourni avec l'unité d'évaluation (60),- dans lequel l'unité d'évaluation est conçue pour évaluer la densité de circulation (71-74) à l'aide de données historiques, l'unité d'évaluation étant en outre conçue pour comparer une courbe temporelle actuelle à des courbes temporelles historiques appropriées,caractérisé en ce que, en présence d'un écart régulier entre les données actuelles et les données historiques, l'unité d'évaluation est en outre conçue pour extrapoler une courbe temporelle d'une situation actuelle par l'ajout d'une valeur constante aux données historiques.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102013014872.3A DE102013014872A1 (de) | 2013-09-06 | 2013-09-06 | Verfahren, Auswertesystem und kooperatives Fahrzeug zum Prognostizieren von mindestens einem Stauparameter |
| PCT/EP2014/002401 WO2015032499A1 (fr) | 2013-09-06 | 2014-09-04 | Procédé, système d'évaluation et véhicule permettant de pronostiquer au moins un paramètre d'embouteillage |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP3042368A1 EP3042368A1 (fr) | 2016-07-13 |
| EP3042368B1 true EP3042368B1 (fr) | 2017-06-21 |
Family
ID=51494262
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP14761580.1A Not-in-force EP3042368B1 (fr) | 2013-09-06 | 2014-09-04 | Procede, systeme d'evaluation et vehicule pour anticiper au moins un parametre d'un bouchon |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9805594B2 (fr) |
| EP (1) | EP3042368B1 (fr) |
| CN (1) | CN105474285B (fr) |
| DE (1) | DE102013014872A1 (fr) |
| WO (1) | WO2015032499A1 (fr) |
Families Citing this family (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015052953A1 (fr) * | 2013-10-08 | 2015-04-16 | 日本電気株式会社 | Système de guidage de véhicule, procédé de guidage de véhicule, dispositif de gestion et procédé de commande pour ce dernier |
| DE102015203233A1 (de) * | 2015-02-24 | 2016-08-25 | Bayerische Motoren Werke Aktiengesellschaft | Server, System und Verfahren zur Bestimmung einer Position eines Stauendes |
| US9576481B2 (en) | 2015-04-30 | 2017-02-21 | Here Global B.V. | Method and system for intelligent traffic jam detection |
| DE102015217792B4 (de) * | 2015-09-17 | 2022-07-14 | Volkswagen Aktiengesellschaft | Vorrichtung, Verfahren und Computerprogramm zum Bereitstellen von Information über ein Stauende über eine Fahrzeug-zu-Fahrzeug-Schnittstelle |
| DE102015217793A1 (de) * | 2015-09-17 | 2017-03-23 | Volkswagen Aktiengesellschaft | Vorrichtung, Verfahren und Computerprogramm zum Bereitstellen von Stauinformation über eine Fahrzeug-zu-Fahrzeug-Schnittstelle |
| EP3236446B1 (fr) | 2016-04-22 | 2022-04-13 | Volvo Car Corporation | Agencement et procédé de fourniture d'adaptation à la longueur de la file d'attente d'applications d'assistance pour feu de circulation |
| US9965950B2 (en) * | 2016-06-03 | 2018-05-08 | Here Global B.V. | Method and apparatus for classifying a traffic jam from probe data |
| US10043385B2 (en) * | 2016-06-06 | 2018-08-07 | United States Cellular Corporation | Configuring traffic control device switch timing intervals using mobile wireless device-provided traffic information |
| CN107578632A (zh) * | 2016-07-05 | 2018-01-12 | 奥迪股份公司 | 交通密度检测系统、交通工具及方法 |
| US10908607B2 (en) * | 2017-11-30 | 2021-02-02 | Ford Global Technologies, Llc | Enhanced traffic jam assist |
| US10599929B2 (en) * | 2018-01-04 | 2020-03-24 | Motionloft, Inc. | Event monitoring with object detection systems |
| CN108615408A (zh) * | 2018-04-09 | 2018-10-02 | 谷坤明 | 一种基于距离传感器以及物联网技术的智能行车辅助系统 |
| CN108399778A (zh) * | 2018-05-08 | 2018-08-14 | 深圳市易成自动驾驶技术有限公司 | 群体智能拥堵提示方法、系统及计算机可读存储介质 |
| DE102018213378B4 (de) * | 2018-08-09 | 2021-01-28 | Bayerische Motoren Werke Aktiengesellschaft | Fahrassistenzsystem für ein Fahrzeug, Fahrzeug mit demselben und Fahrassistenzverfahren für ein Fahrzeug |
| JP7131433B2 (ja) * | 2019-02-26 | 2022-09-06 | トヨタ自動車株式会社 | 車載用情報処理装置、車両間情報処理システム、及び情報処理システム |
| CN110288824B (zh) * | 2019-05-20 | 2020-12-01 | 浙江工业大学 | 基于Granger causality路网早晚高峰拥堵状况和传播机制分析方法 |
| US11488470B2 (en) | 2020-11-06 | 2022-11-01 | Imam Abdulrahman Bin Faisal University | System and method for real-time assessment of traffic stream flow characteristics |
| DE102021201063B4 (de) | 2021-02-04 | 2024-07-11 | Volkswagen Aktiengesellschaft | Verfahren zum Betreiben eines Systems für ein zumindest teilweise assistiert betriebenes Kraftfahrzeug, Computerprogrammprodukt sowie System |
| US11749108B2 (en) * | 2021-03-31 | 2023-09-05 | Honda Motor Co., Ltd. | System and method for lane level traffic state estimation |
| US12230129B2 (en) * | 2021-10-28 | 2025-02-18 | Toyota Motor Engineering & Manufacturing North America, Inc. | Monitoring a traffic condition of stopped or slow moving vehicles |
| KR20230085697A (ko) * | 2021-12-07 | 2023-06-14 | 현대자동차주식회사 | 차량 제어 장치, 및 그를 이용한 차량 제어 방법 |
| US20230230471A1 (en) * | 2022-01-14 | 2023-07-20 | Toyota Motor Engineering & Manufacturing North America, Inc. | Cooperative traffic congestion detection for connected vehicular platform |
| US12272237B2 (en) * | 2022-12-27 | 2025-04-08 | Itron, Inc. | Pedestrian and vehicle congestion relief system |
| CN117315934A (zh) * | 2023-09-25 | 2023-12-29 | 阜阳交通能源投资有限公司 | 基于无人机的高速公路车流量实时监测及拥堵预测系统 |
| CN120840643A (zh) | 2024-04-28 | 2025-10-28 | 通用汽车环球科技运作有限责任公司 | 确定交通拥堵情况下的最优车辆操纵计划 |
Family Cites Families (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0908861A3 (fr) * | 1997-09-16 | 2000-08-23 | Siemens Aktiengesellschaft | Procédé de transmission d'information sur le trafic |
| DE10036789A1 (de) * | 2000-07-28 | 2002-02-07 | Daimler Chrysler Ag | Verfahren zur Bestimmung des Verkehrszustands in einem Verkehrsnetz mit effektiven Engstellen |
| DE10043797A1 (de) | 2000-09-06 | 2002-03-28 | Daimler Chrysler Ag | Integriertes Verkehrsüberwachungssystem |
| DE10057796B4 (de) * | 2000-11-22 | 2007-12-27 | Daimlerchrysler Ag | Verfahren zur fahrzeugindividuellen Verkehrszustandsprognose |
| DE10062856B4 (de) | 2000-12-16 | 2008-01-10 | Daimlerchrysler Ag | Verfahren zur fahrzeugindividuellen Verkehrsprognose |
| DE10063763A1 (de) * | 2000-12-21 | 2002-07-25 | Daimler Chrysler Ag | Verfahren und Vorrichtung zur Erzeugung und Ausgabe von streckenbezogenen Routeninformationen |
| US7698055B2 (en) | 2004-11-16 | 2010-04-13 | Microsoft Corporation | Traffic forecasting employing modeling and analysis of probabilistic interdependencies and contextual data |
| DE102006001354A1 (de) | 2006-01-11 | 2007-07-12 | Daimlerchrysler Ag | Verfahren zur prognosegestützten Stauüberwachung in einem Fahrzeug |
| DE102006004130B4 (de) * | 2006-01-27 | 2012-02-16 | Audi Ag | Verfahren zur Bestimmung eines zukünftigen Straßenverlaufs durch Kommunikaiton zwischen Kraftfahrzeugen |
| DE502007005096D1 (de) | 2006-10-25 | 2010-10-28 | Continental Teves Ag & Co Ohg | Aufbau von kommunikationsverbindungen zwischen fahrzeugen |
| DE102007050154A1 (de) | 2007-10-19 | 2009-04-23 | Siemens Ag | Prognosesystem zum Vorhersagen von Fahrzeiten, fahrzeuggestütztes Routenplanungssystem, Verkehrsinformationssystem und -verfahren |
| DE102008003039A1 (de) | 2008-01-02 | 2009-07-09 | Daimler Ag | Verfahren zur Verkehrszustandsbestimmung in einem Fahrzeug |
| CN101290713A (zh) | 2008-07-11 | 2008-10-22 | 浙江工业大学 | 一种结合周相似特性的分形交通流预测方法 |
| CN101325004B (zh) * | 2008-08-01 | 2011-10-05 | 北京航空航天大学 | 一种实时交通信息的数据补偿方法 |
| EP2166524B1 (fr) * | 2008-09-17 | 2016-03-30 | Harman Becker Automotive Systems GmbH | Procédé d'affichage des informations de densité de trafic |
| DE102009008745B4 (de) | 2009-02-12 | 2020-12-24 | Volkswagen Ag | Verfahren und System zur automatischen Verkehrsführung |
| CN101694743B (zh) | 2009-08-25 | 2011-09-21 | 北京世纪高通科技有限公司 | 预测路况的方法和装置 |
| DE102009029531A1 (de) * | 2009-09-17 | 2011-03-24 | Robert Bosch Gmbh | Einschätzung der Straßenverkehrsdichte bei Kraftfahrzeugen |
| DE102011083677A1 (de) * | 2011-09-29 | 2013-04-04 | Bayerische Motoren Werke Aktiengesellschaft | Prognose einer Verkehrssituation für ein Fahrzeug |
| DE102012009822A1 (de) * | 2012-05-18 | 2012-11-29 | Daimler Ag | Verfahren zur Ermittlung einer Größe zur Beschreibung eines lokalenVerkehrs |
-
2013
- 2013-09-06 DE DE102013014872.3A patent/DE102013014872A1/de not_active Withdrawn
-
2014
- 2014-09-04 CN CN201480045735.4A patent/CN105474285B/zh not_active Expired - Fee Related
- 2014-09-04 EP EP14761580.1A patent/EP3042368B1/fr not_active Not-in-force
- 2014-09-04 WO PCT/EP2014/002401 patent/WO2015032499A1/fr not_active Ceased
- 2014-09-04 US US14/917,159 patent/US9805594B2/en not_active Expired - Fee Related
Non-Patent Citations (1)
| Title |
|---|
| None * |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2015032499A1 (fr) | 2015-03-12 |
| US9805594B2 (en) | 2017-10-31 |
| CN105474285A (zh) | 2016-04-06 |
| DE102013014872A1 (de) | 2015-03-12 |
| EP3042368A1 (fr) | 2016-07-13 |
| US20160210852A1 (en) | 2016-07-21 |
| CN105474285B (zh) | 2017-09-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3042368B1 (fr) | Procede, systeme d'evaluation et vehicule pour anticiper au moins un parametre d'un bouchon | |
| DE102012213048B4 (de) | Vorrichtung zum Aktualisieren einer Fahrzeitabschätzung | |
| EP2826031B1 (fr) | Procédé pour la détection d'un embouteillage au moyen d'une communication sans fil voiture-à-voiture | |
| EP1695317B1 (fr) | Identification d'etat du trafic par un procede de valeurs seuils | |
| DE69917543T2 (de) | Verkehrsinformationübermittlungssystem | |
| DE102012212681B4 (de) | Autonome Konvoitechnik für Fahrzeuge | |
| DE102007037920B4 (de) | Verkehrszustands-Vorhersagevorrichtung | |
| DE102015202367A1 (de) | Autonome steuerung in einer dichten fahrzeugumgebung | |
| EP2460337B1 (fr) | Procédé et dispositif permettant de communiquer avec un autre véhicule ou avec un dispositif d'infrastructure | |
| DE102012201472A1 (de) | Verfahren zur Bereitstellung von Parkinformationen zu freien Parkplätzen | |
| DE102017110683A1 (de) | Strassenranddienstleistungsschätzungen basierend auf funkfahrzeugdaten | |
| DE112006003060T5 (de) | System und Verfahren zum Aktualisieren von Verkehrsdaten unter Verwendung von Sondenfahrzeugen mit Aussensensoren | |
| EP2856452A1 (fr) | Reconnaissance de voies de circulation directionnelles | |
| WO2019073007A1 (fr) | Procédé et système permettant de déterminer des vitesses de vent effectives pour des véhicules à moteur | |
| EP2116981B1 (fr) | Procédé et dispositif de détermination de longueurs de retenue à hauteur de signaux lumineux | |
| EP2662846A1 (fr) | Procédé de réduction d'un risque d'embouteillage | |
| EP1466140B1 (fr) | Procede de determination d'un temps de trajet | |
| DE112011103239T5 (de) | Systeme und Verfahren zum Abschätzen des örtlichen Verkehrsflusses | |
| DE102013001120A1 (de) | Verfahren zum Betreiben von Kraftfahrzeugen, die über eine Fahrzeug-zu-Fahrzeug-Kommunikation verbunden sind | |
| DE102021114717A1 (de) | Steuerung von fahrzeug-zu-infrastruktur-kommunikation | |
| DE102012009822A1 (de) | Verfahren zur Ermittlung einer Größe zur Beschreibung eines lokalenVerkehrs | |
| DE102012024166A1 (de) | Warnen eines Fahrers eines Kraftfahrzeugs vor einer Staufront mit Hilfe einer korrigierten Prognosefunktion | |
| DE602006000904T2 (de) | System zur Detektion von Fahrzeugverkehr mittels bordeigener telematischer Kooperationsplattform basierend auf erweiterten Stichprobenfahrzeugdaten | |
| DE102005009604B4 (de) | Verfahren und Vorrichtung zum Erzeugen eines Bewertungswertes für Verkehrsdaten | |
| EP4287157A1 (fr) | Procédé de détermination ou d'attribution des informations de voie de circulation concernant plusieurs usagers de la route se trouvant sur un tronçon de route, réseau ou système de télécommunication, usager de la route, programme informatique et support lisible par ordinateur |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 20160406 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| RIN1 | Information on inventor provided before grant (corrected) |
Inventor name: LORENZ, STEPHAN Inventor name: LACKO, TILMAN Inventor name: BUCHHOLZ, JAN |
|
| DAX | Request for extension of the european patent (deleted) | ||
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| INTG | Intention to grant announced |
Effective date: 20170406 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 903571 Country of ref document: AT Kind code of ref document: T Effective date: 20170715 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502014004357 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 4 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20170621 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170621 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170921 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170621 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170621 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170922 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170621 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170621 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170921 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170621 Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170621 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170621 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170621 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170621 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170621 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170621 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170621 Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170621 Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170621 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20171021 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 502014004357 Country of ref document: DE |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170621 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| 26N | No opposition filed |
Effective date: 20180322 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170621 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: MM4A |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20170930 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170904 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170930 Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170930 Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170904 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170621 Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170930 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 5 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170621 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20140904 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170621 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170621 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170621 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170621 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170621 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MM01 Ref document number: 903571 Country of ref document: AT Kind code of ref document: T Effective date: 20190904 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190904 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20220930 Year of fee payment: 9 |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Effective date: 20230530 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20230920 Year of fee payment: 10 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20230922 Year of fee payment: 10 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R119 Ref document number: 502014004357 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20240403 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20240904 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20240904 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20240930 |