EP4265556A1 - Antriebsmaschine für einen aufzug - Google Patents
Antriebsmaschine für einen aufzug Download PDFInfo
- Publication number
- EP4265556A1 EP4265556A1 EP23168005.9A EP23168005A EP4265556A1 EP 4265556 A1 EP4265556 A1 EP 4265556A1 EP 23168005 A EP23168005 A EP 23168005A EP 4265556 A1 EP4265556 A1 EP 4265556A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- drive shaft
- electric motor
- drive
- rotor
- coupling
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images



Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B11/00—Main component parts of lifts in, or associated with, buildings or other structures
- B66B11/04—Driving gear ; Details thereof, e.g. seals
- B66B11/043—Driving gear ; Details thereof, e.g. seals actuated by rotating motor; Details, e.g. ventilation
Definitions
- the invention relates to a drive machine for an elevator, wherein the drive machine comprises an electric motor and a drive shaft and wherein the drive shaft can be driven by means of the electric motor and is also mounted on both sides in respective bearings.
- the drive shaft can in particular be designed to drive at least one belt, for example a flat belt or a profile belt.
- the drive shaft can therefore be designed in particular as a belt shaft.
- Such drive machines or drive arrangements are already used in the prior art to move elevator cars in an elevator shaft, with the use of flat or profile belts as suspension means having the significant advantage over classic round suspension cables that there are no longer any traction sheaves with a correspondingly large diameter (typically greater than 500 mm) are required, but that due to the better traction between the drive shaft and the belt, the drive shaft can have a comparatively small diameter (typically less than 300 mm). This also reduces the requirements for the torque that the electric motor must provide to drive the drive shaft, so that the electric motor can in particular be designed without a gear.
- the object of the invention is to provide a drive machine that is powerful and safe and at the same time easy to transport and assemble.
- the features of claim 1 are provided according to the invention in a drive machine.
- a rotor of the electric motor is connected to the drive shaft in a gearless and rotationally fixed manner via a releasable coupling and that the electric motor is also suspended freely in space on the drive shaft by means of the coupling .
- the drive shaft can therefore preferably carry the electric motor.
- the drive shaft is directly driven by the electric motor.
- the drive shaft centers the axis of rotation of the rotor of the electric motor.
- a substructure supporting the electric motor such as complex pendulum feet or the like
- overdetermination is also avoided, so that no dangerous mechanical stresses can build up during operation.
- the electric motor or more precisely its housing, may have support feet. However, after the electric motor has been installed on the drive shaft, these feet hang in the air.
- a significant advantage of such a design is that the electric motor, more precisely its rotor, and the drive shaft can be easily dismantled and transported separately from one another to the installation site of the drive machine. This simplifies the transport of the drive machine.
- the drive shaft can be made significantly shorter than if it were designed in one piece with the rotor of the electric motor. This also makes it easier to assemble the drive machine at the site of use.
- the coupling between the rotor and the drive shaft can be designed such that either the rotor is inserted into the drive shaft or the drive shaft is inserted into the rotor.
- the electric motor can be plugged onto the drive shaft or plugged into the drive shaft or after assembly has been completed.
- the drive shaft can already be installed in a stationary manner with the help of a support structure, the support structure carrying the bearings that support the drive shaft.
- the drive shaft can thus be designed as a belt shaft and have several adjacent running surfaces (as a traction surface for the respective belt), each of which is designed to drive a belt (which carries the respective elevator car as a suspension element).
- the easy dismantling of the electric motor due to the coupling is also an advantage because an independent test of the two units of the drive machine connected to one another via the releasable coupling, namely on the one side a support structure that carries the drive shaft (and absorbs holding loads) and on the On the other side, the electric motor, which is freely suspended on the drive shaft, is possible.
- these respective components of the drive machine can be manufactured, tested and shipped at different locations.
- Another advantage of this design is that the electric motor - due to the freely hanging design - can be designed free of a machine frame.
- the motor housing can therefore be the only structure that delimits the electric motor from the outside.
- the free suspension has the advantage that the electric motor can be aligned with the drive shaft without any tension. This can cause misalignment and therefore a Weighing load on the drive train of the drive machine, especially in the area of the clutch, (during operation) can be avoided. In addition, there does not have to be a complex substructure to which the electric motor has to be aligned and supported.
- the rotor can be mounted within the electric motor in a manner known per se by a bearing on the A (output side) or B side.
- the drive machine introduced at the beginning can also be characterized in that a rotor of the electric motor is connected to the drive shaft in a gearless and rotationally fixed manner via a releasable coupling and that at least one braking device for braking the drive shaft is connected to the clutch on the output side, i.e. preferably between the bearings on both sides of the drive shaft , is arranged.
- Such an arrangement of the at least one braking device has advantages in terms of the simple design of the drive machine, since safety is still guaranteed even if the clutch only provides a rotationally fixed connection between the rotor and the drive shaft by means of friction. In the event of a failure of this frictional connection, the load carried by the drive machine via the belts can be held securely in position by holding the drive shaft, regardless of the position of the rotor of the electric motor, i.e. even if the clutch fails.
- the braking device can be used as a pliers and/or Be designed with a disc brake.
- the respective braking device can also include several brake shoes.
- the drive machine introduced at the beginning can also be characterized (in addition or alternatively) in that a rotor of the electric motor is connected to the drive shaft in a gearless and non-rotatable manner via a releasable coupling and in that a coupling surface of the coupling is conical. Due to the cone shape, a frictional connection can be created in the area of the coupling surface, which creates the desired rotation-proof connection between the drive shaft and rotor.
- Such a frictional connection can preferably be achieved by tightening an outer cone onto an inner cone, preferably by means of a screw connection.
- the outer cone can, for example, be formed by the drive shaft and the inner cone by the rotor. However, it is just as possible for the outer cone to be formed by the rotor and the inner cone to be formed by the drive shaft.
- the inner and outer cones can alternatively also be provided by respective separate elements of a clamping coupling, as will be explained in more detail.
- the mentioned screw connection which tightens the outer cone onto the inner cone, can be achieved, for example, by means of at least one tightening screw which is aligned in the direction of an axis of rotation of the drive shaft.
- This allows axial tightening forces to be generated which, on the one hand, produce the desired frictional connection and thus the rotation-proof connection between the rotor and the drive shaft due to the conical shape of the coupling surface and, on the other hand, center the rotor to the drive shaft.
- this can be the case Axis of rotation of the rotor coincides with the axis of rotation of the drive shaft.
- the at least one tightening screw can be supported on a respective shoulder or step, which forms the element (rotor or drive shaft) which forms the inner cone and / or engage in a thread which is formed in the element (rotor or drive shaft) which forms the outer cone.
- a corresponding passage can be formed in the rotor through which the tightening screw is passed so that it engages in a thread in the drive shaft and so the drive shaft (which in this case forms the outer cone) onto the rotor can tighten.
- the drive shaft which in this case forms the outer cone
- at least one tightening screw can be guided through a passage in the drive shaft on the drive side in order to engage in a thread formed in the rotor.
- a tightening screw arranged centrally on the axis of rotation can be used; Alternatively or additionally, tightening screws arranged collinearly to the axis of rotation can also be provided.
- the drive machine described at the beginning can therefore (alternatively or in addition to the previously explained features) also be characterized by the fact that a rotor of the electric motor is connected to the drive shaft in a gearless and non-rotatable manner via a releasable coupling and that the rotor is designed as a hollow shaft on one side of the drive shaft and as a solid shaft on the opposite side.
- this design has the advantage that comparatively small and therefore inexpensive, preferably optical, rotary encoders can be mounted on the solid shaft formed by the rotor (on the B side of the electric motor).
- the clutch is at least partially arranged within a housing of the electric motor.
- a coupling surface of the coupling (at least partially but preferably completely) can be arranged within a housing of the electric motor. This coupling surface can therefore transmit a drive torque from the electric motor to the drive shaft.
- Arranging the coupling at least partially within the housing of the electric motor has the advantage that a distance between the housing of the electric motor and a support structure that carries the bearings of the drive shaft, as an assembly gap, only has to be designed to be large enough to accommodate a tool (e.g Torque wrench) for assembly or disassembly of the coupling connection provided by the coupling fits into it.
- a tool e.g Torque wrench
- This has advantages in reducing the mechanical load on the bearings, which is a significant advantage when the engine weighs 1.5 tons, for example.
- the coupling provides or establishes a rotationally fixed connection between the drive shaft and the rotor by means of a frictional connection and/or a positive connection.
- the clutch preferably has no elastic elements, so that the clutch can transmit a drive torque of the electric motor to the drive shaft without play.
- the clutch has a clamping element and a counter-clamping element, i.e. the clutch can be designed as a clamping clutch.
- the clamping element and the counter-clamping element can be axially clamped or clamped against one another, this clamping can preferably be achieved by means of a screw connection.
- the clamping element can also form an inner cone on which an outer cone of the counter-clamping element rests (in the assembled state).
- the coupling can therefore be designed in particular as a ring clamping element.
- the tensioning element and the counter-tensioning element can therefore be designed separately from the drive shaft and the rotor.
- such separate tensioning and counter-tensioning elements can also form a conical coupling surface as described above and this can also be arranged (at least partially but preferably completely) within a housing of the electric motor (in the assembled state).
- An axial clamping direction of the coupling is preferably aligned along a rotation axis of the electric motor.
- Such a clamping element in particular if designed as a cone clamping element, can therefore provide an internal clamping connection with which the rotor of the electric motor can be fastened to the drive shaft without play (during assembly of the drive machine).
- Both the rotor and the drive shaft in the coupling area can be designed to be rotationally symmetrical, which simplifies production.
- a positive connection can therefore be dispensed with.
- Ring tensioning elements in particular have previously been used, for example, for fastening chain wheels, flywheels, levers, belt pulleys, brake discs or conveyor belt drums.
- the drive shaft or the rotor can form a step that serves as a mechanical stop for the radially inner counter-tensioning element.
- a mounting gap is formed or kept free between a motor-side bearing of the drive shaft and the electric motor (in the fully assembled state of the drive machine). This means that the coupling can be tightened using hand tools during assembly and then loosened again later (in the same way).
- the mounting gap can, for example, be 10 cm wide or even narrower.
- a coupling surface of the coupling (i.e. in particular the previously mentioned coupling surface) can be positioned so that it penetrates in the axial direction a radial plane in which an A-bearing of the electric motor is arranged, which supports the rotor.
- the coupling can be axial be designed in an area in which the rotor of the electric motor is supported by the A bearing.
- the coupling is sunk into a housing of the electric motor in the axial direction.
- This can in particular be designed in such a way that the housing projects beyond the coupling in the axial direction and towards the drive shaft.
- the assembly gap can be made narrower, which reduces the length of the entire arrangement in the axial direction.
- the mechanical load on the clutch can be reduced.
- the rotor is designed as a hollow shaft on the drive shaft side and the drive shaft forms a pin that engages in the rotor. This allows the pin of the drive shaft to define an axis of rotation of the rotor (in space). In this case, the rotor and thus the electric motor is plugged onto the pin of the drive shaft during assembly.
- the drive shaft is designed as a hollow shaft on the motor side and the rotor of the electric motor forms a pin that engages in the drive shaft.
- the drive shaft can determine the axis of rotation of the rotor. The In this case, the rotor and thus the electric motor are inserted with their pin into the drive shaft during assembly.
- the pin in question can be formed both on the engine side and on the side of the drive shaft (i.e. from it).
- the choice of variant can, for example, be made depending on which other drive machines the electric motor is to be used in.
- an angular position of a housing of the electric motor in relation to a rotation axis of the electric motor can be fixed via a torque arm.
- This allows, in particular, an angular position of a stator of the electric motor to be determined.
- the torque arm is connected to the housing of the electric motor via at least one bearing.
- the torque arm can only determine the angular position, but no other degrees of freedom for the position of the electric motor in space.
- the torque support cannot absorb any axial forces with respect to an axis of rotation of the drive shaft.
- the torque arm can also preferably be arranged in the assembly gap mentioned.
- the torque support therefore only prevents the motor housing and thus a stator of the electric motor from rotating when the electric motor is energized.
- the torque arm does not absorb the weight of the electric motor, which is why the torque arm can typically only be mounted on the drive shaft after the electric motor has been installed.
- the prime mover can also include a support structure that supports the drive shaft (more precisely, the bearings of the drive shaft).
- the support structure preferably also carries at least one deflection roller, wherein the deflection roller can serve to redirect the at least one belt of the drive machine.
- the previously mentioned torque arm can be supported on the supporting structure.
- the supporting structure can provide a counter-torque to the driving torque of the electric motor.
- the electric motor can otherwise have no connection to the supporting structure and can therefore be mounted hanging completely freely in space.
- the braking device mentioned at the beginning can in particular be designed as an electromechanical holding brake for holding the drive shaft.
- a brake disc of the braking device can be connected to the drive shaft in a rotationally fixed manner.
- the electromechanical holding brake can be designed in such a way that it only releases when energized, but brakes when de-energized and in this case can securely hold the drive shaft (i.e. especially if the power supply is lost).
- the electric motor of the drive machine can preferably be a permanent magnet electric motor.
- the rotor of the electric motor can have permanent magnets.
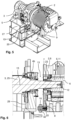
- the Figure 1 shows a side sectional view through a drive machine 1 according to the invention, which includes a drive shaft 3 and an electric motor 2 designed as a synchronous machine.
- the drive shaft 3 is designed as a belt shaft and drives a total of five belts 5, which are designed as flat belts.
- the drive shaft 3 is mounted on both sides in respective bearings 4a and 4b and can be driven by the electric motor 2.
- a rotor 6 of the electric motor 2 which carries permanent magnets, is connected to the drive shaft 3 in a gearless and rotationally fixed manner via a releasable coupling 7.
- the rotor 6 is designed as a hollow shaft 11 on the side of the drive shaft 3.
- the rotor 6 is designed as a solid shaft 25.
- an optical rotary encoder 21 in the form of an angle encoder is mounted on the front of the rotor 6, more precisely on the solid shaft 25, so that the current position of the rotor 6 can be detected by sensors.
- the drive shaft 3 forms a pin 12 on the motor side, which is inserted into the rotor 6, more precisely into the hollow shaft 11.
- the pin 12 or the axis of rotation 15 of the drive shaft 3 determines the axis of rotation 14 of the rotor 6 of the electric motor 2.
- the drive shaft 3 could also be designed as a hollow shaft 11 on the engine side.
- the rotor 6 would form a pin 12, which then engages in the drive shaft 3.
- an analogous clamping coupling 7 shown in the figures could be used, only in the reverse installation direction.
- the electric motor 2 is thus suspended freely in space on the drive shaft 3 by means of the coupling 7, the drive shaft 3 in turn being supported on a support structure 27 via the bearings 4a, 4b.
- the drive shaft 3 thus carries the electric motor 2.
- the two bearings 4a and 4b of the drive shaft 3 not only absorb the forces that are transmitted to the drive shaft 3 via the belts 5, but also the entire weight of the electric motor 2.
- the electric motor 2 Although it has several support feet 9, which serve to be able to temporarily turn off the electric motor 2 safely; However, when assembled, these feet 9 hang in the air, as shown in the views Figure 4 and Figure 5 is easy to see.
- the clutch 7 establishes a rotationally fixed connection between the drive shaft 3 and the rotor 6 by means of frictional engagement and without any positive connection.
- the coupling 7 has no elastic elements whatsoever.
- the clutch 7 is designed as a clamping clutch and includes a clamping element 16 and an associated counter-tensioning element 17, which are axially braced against one another by means of a screw connection 20.
- the (radially outer) clamping element 16 forms an inner cone 18, on which an outer cone 19 rests, which is formed by the (radially inner) counter-clamping element 17.
- These elements 17, 18, 20 thus form a ring clamping element.
- the inner counter-tensioning element 17 is supported axially on a step 22, which is formed on the outside circumference of the drive shaft 3, in the area of the clutch 7.
- the clamping clutch 7 offers a conical clutch surface 30, which produces a desired frictional connection.
- the clutch 7 is set so far in the axial direction into the electric motor 2 that said clutch surface 30 penetrates a radial plane in which the in the Figures 7 and 8 A bearing 23 of the electric motor 2 that can be seen is arranged, which supports the rotor 6 (compare the dotted lines in Figure 8 ).
- a mounting gap 13 is kept free between the motor-side bearing 4b of the drive shaft 3 and the electric motor 2. This makes it possible to tighten the coupling 7 using hand tools when assembling the electric motor 2 on the drive shaft 3 and to loosen it again later, since the assembly gap 13 is designed to be sufficiently large to be able to handle the Hand tools to access the screw connection 20 of the coupling 7.
- the torque support 10 has a pin 32 which is connected to the housing 8 of the electric motor 2 by means of a screw connection 20 (see Figure 7 ).
- the pin 32 is rotatably and axially displaceably mounted in a bearing 4 of the torque arm 10.
- the torque arm 10 is mounted on the supporting structure 27 with a second bearing 4. Due to the two bearings 4 of the torque arm 9, it can determine an angular position of the housing 8 of the electric motor 2 in relation to a rotation axis 14 of the electric motor 2 (cf. Fig. 1 ) and thus prevent the housing 8 from rotating when the electric motor 2 is energized.
- the torque support 10 cannot determine any other degrees of freedom for the position of the electric motor 2 in space and cannot absorb any axial forces in relation to the axis of rotation 15 of the drive shaft 3 (cf. Fig. 7 ). This avoids overdetermination and only the angular position of the electric motor 2 is determined by the torque arm 10. Otherwise, the electric motor 2 is suspended freely in space on the drive shaft 3. How to be good at Figure 6 recognizes, the torque arm 10 is arranged in the mounting gap 13.
- the drive machine 1 also includes a deflection roller 28, which deflects the total of five carrying belts 5, whereby other numbers of belts 5 can also be used.
- the deflection roller 28 can be moved on the support structure 27, so that a distance between the deflection roller 28 and the drive shaft 2 (in the x direction in Figure 2 ) is adjustable. Also in the Figures 3 and 4 Both positions of the single deflection roller 28 are illustrated (note the block arrows there too).
- a first belt side 33 can run to the elevator car or to a counterweight. Accordingly, the second belt side 34 can then run to the counterweight or to the car, depending on the design of the elevator shaft.
- the drive machine 1 according to the invention can therefore be used in different elevator constellations.
- the drive machine 1 also includes a braking device 26 for braking the drive shaft 3.
- This braking device 26 is designed as an electromagnetic holding brake and has a brake disk 29 which is connected to the drive shaft 3 in a rotationally fixed manner. The brake shoes of the braking device 26 thus act on the brake disk 29 and thereby brake the drive shaft 3 and can also hold it in a certain rotational position.
- the braking device 26 is arranged between the bearings 4a and 4b on both sides of the drive shaft 3 and is therefore on the output side of the clutch 7 (i.e. on the side of the drive shaft 3 and not on the side of the electric motor 2). Even if, for example, the frictional connection of the Should the clutch 7 fail and the rotation-proof connection between the rotor 6 and the drive shaft 3 would be broken, the braking device 26 can hold the drive shaft 3 securely.
- the braking device 26 is designed in such a way that the holding force is exerted in the de-energized state (due to a mechanical restoring element).
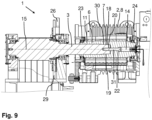
- FIG. 9 shows a further possible embodiment of a drive machine 1 according to the invention, although here no separate ring clamping element is used as a clutch 7, but rather the clutch 7 is formed directly by the drive shaft 3 and the rotor 6.
- the rotor 6 is again designed as a hollow shaft 11 on the drive side and thus offers a receptacle into which the drive shaft 3 is inserted, ie the electric motor 2 is plugged onto the drive shaft 3 here.
- the rotor 6 forms an inner cone 18, which fits an outer cone 19, which the drive shaft 3 forms at its motor-side end.
- a conical coupling surface 30 is thus formed between the drive shaft 3 and the rotor 6.
- a tightening screw 31 which is arranged centrally on and along the axis of rotation 14 of the rotor 6, is guided through a passage in the rotor 6 to the drive shaft 3 and there engages in a thread in the drive shaft 3.
- the tightening screw 31 is supported on a step/shoulder 22 which is formed on the rotor 6.
- the tightening force creates a frictional connection between the drive shaft 3 and the rotor 6, whereby the desired rotation-proof connection and thus a direct drive of the drive shaft 3 is achieved.
- using the cone-shaped Coupling surface 30 of the rotor 6 is centered on the drive shaft 3, so that the axis of rotation 14 of the rotor 6 and the axis of rotation 15 of the drive shaft 3 coincide.
- the inner cone 18 could also be designed on the drive shaft 3, for example.
- the rotor 6 could be inserted into the drive shaft 3 and the frictional connection to the drive shaft 3 could be produced by means of a suitable outer cone 19 at the drive-side end of the rotor 6.
- the tightening screw 31 could also be used, for example (in Figure 9 from left to right) through a passage in the drive shaft 3 into a thread that is formed in the rotor 6.
- the drive shaft 3 would therefore be designed (at least in sections) as a hollow shaft 11.
Landscapes
- Engineering & Computer Science (AREA)
- Civil Engineering (AREA)
- Mechanical Engineering (AREA)
- Structural Engineering (AREA)
- Connection Of Motors, Electrical Generators, Mechanical Devices, And The Like (AREA)
Abstract
Description
- Die Erfindung betrifft eine Antriebsmaschine für einen Aufzug, wobei die Antriebsmaschine einen Elektromotor sowie eine Antriebswelle umfasst und wobei die Antriebswelle mittels des Elektromotors antreibbar ist und zudem beidseitig in jeweiligen Lagern gelagert ist. Die Antriebswelle kann hierbei insbesondere zum Antreiben wenigstens eines Riemens, beispielsweise eines Flachriemens oder eines Profil-Riemens, ausgebildet sein. Die Antriebswelle kann somit insbesondere als Riemenwelle ausgestaltet sein.
- Derartige Antriebsmaschinen bzw. Antriebsanordnungen werden bereits im Stand der Technik genutzt, um Aufzugskabinen in einem Aufzugsschacht zu bewegen, wobei die Verwendung von Flach- oder Profilriemen als Tragmittel gegenüber klassischen runden Tragseilen den wesentlichen Vorteil hat, dass nicht mehr Treibscheiben mit entsprechend großem Durchmesser (typischerweise größer 500 mm) erforderlich sind, sondern dass aufgrund der besseren Traktion zwischen der Antriebswelle und dem Riemen die Antriebswelle einen vergleichsweise geringen Durchmesser (von typischerweise kleiner 300 mm) aufweisen kann. Dadurch verringern sich auch die Anforderungen an das Drehmoment, welches der Elektromotor zum Antreiben der Antriebswelle zur Verfügung stellen muss, sodass der Elektromotor insbesondere getriebelos ausgebildet werden kann.
- Ein weiterer aktueller Trend bei Aufzügen besteht darin, dass die von Kunden gewünschten Anforderungen in Bezug auf die Geschwindigkeit und die zu bewegenden Nutzlasten ansteigen, sodass sich im Betrieb Belastungsspitzen von über 10 t ergeben können, die auf die Antriebswelle, vermittelt über die Riemen, einwirken. Gleichzeitig steht bei Aufzügen die Sicherheit der transportierten Personen an oberster Priorität. Die Sicherheit im Betrieb des Aufzugs muss somit in jedem Fall gewährleistet sein, insbesondere müssen technische Vorkehrungen getroffen werden, um ein Versagen des Antriebsstrangs zu verhindern. In der konkreten Anwendung muss die Antriebsmaschine somit einerseits in der Lage sein, hohe Kräfte aufzunehmen und andererseits müssen die für einen Aufzug wichtigen Sicherheitskriterien eingehalten werden, insbesondere muss ein Bruch im Antriebsstrang zwischen Elektromotor und Antriebswelle unter allen Umständen vermieden werden.
- Von diesem technischen Hintergrund ausgehend liegt der Erfindung die Aufgabe zugrunde, eine Antriebsmaschine bereitzustellen, die leistungsfähig und sicher ist und aber gleichzeitig auch einfach transportierbar und montierbar ist.
- Zur Lösung dieser Aufgabe sind erfindungsgemäß bei einer Antriebsmaschine die Merkmale von Anspruch 1 vorgesehen. Insbesondere wird somit erfindungsgemäß zur Lösung der Aufgabe bei einer Antriebsmaschine der eingangs genannten Art vorgeschlagen, dass ein Rotor des Elektromotors getriebelos und drehfest mit der Antriebswelle über eine lösbare Kupplung verbunden ist und dass ferner der Elektromotor mittels der Kupplung frei im Raum an der Antriebswelle aufgehängt ist. Somit kann also bevorzugt die Antriebswelle den Elektromotor tragen.
- Mittels der Kupplung wird somit ein Direktantrieb der Antriebswelle durch den Elektromotor realisiert.
- Aufgrund der freien Aufhängung des Elektromotors an der Antriebswelle, zentriert die Antriebswelle die Rotationsachse des Rotors des Elektromotors. Durch den Verzicht auf eine den Elektromotor tragende Unterkonstruktion, wie etwa aufwändige Pendelfüße oder dergleichen, wird auch eine Überbestimmung vermieden, sodass sich im Betrieb keine gefährlichen mechanischen Spannungen aufbauen können. Zur Zwischenlagerung kann der Elektromotor, genauer dessen Gehäuse, zwar Aufstellfüße aufweisen. Nach erfolgter Montage des Elektromotors an der Antriebswelle hängen diese Aufstellfüße jedoch in der Luft.
- Gerade bei größerer Dimensionierung des Elektromotors (aufgrund von zur Verfügung zu stellenden hohen Nenndrehmomenten) besteht ein wesentlicher Vorteil einer solchen Ausgestaltung darin, dass der Elektromotor, genauer dessen Rotor, und die Antriebswelle einfach demontierbar und getrennt voneinander an den Aufstellungsort der Antriebsmaschine transportiert werden können. Hierdurch wird also der Transport der Antriebsmaschine vereinfacht. Zudem kann die Antriebswelle wesentlich kürzer ausgebildet werden als bei einstückiger Ausbildung mit dem Rotor des Elektromotors. Auch dies erleichtert die Montage der Antriebsmaschine am Einsatzort.
- Die Kupplung zwischen dem Rotor und der Antriebswelle kann dabei so ausgestaltet sein, dass entweder der Rotor in die Antriebswelle oder die Antriebswelle in den Rotor eingesteckt ist. Mit anderen Worten kann also bei der Montage der Antriebsmaschine der Elektromotor auf die Antriebswelle aufgesteckt oder in die Antriebswelle eingesteckt werden beziehungsweise nach erfolgter Montage sein. Hierbei kann die Antriebswelle bereits ortsfest mit Hilfe einer Tragkonstruktion installiert sein, wobei die Tragkonstruktion die Lager trägt, die die Antriebswelle lagern.
- Die Antriebswelle kann somit als eine Riemenwelle ausgestaltet sein und mehrere nebeneinander liegende Laufflächen (als Traktionsfläche für den jeweiligen Riemen) aufweisen, die jeweils zum Antrieb eines Riemens (der die jeweilige Aufzugskabine als Tragmittel trägt) ausgestaltet sind.
- Generell ist die aufgrund der Kupplung gegebene einfache Demontierbarkeit des Elektromotors auch deshalb von Vorteil, weil eine unabhängige Prüfung der beiden miteinander über die lösbare Kupplung verbundenen Einheiten der Antriebsmaschine, nämlich auf der einen Seite eine die Antriebswelle tragende (und Haltelasten aufnehmende) Tragkonstruktion und auf der anderen Seite der frei an der Antriebswelle aufgehängte Elektromotor, möglich ist. Insbesondere können dadurch diese jeweiligen Bestandteile der Antriebsmaschine an unterschiedlichen Standorten gefertigt, geprüft und versandt werden.
- Es versteht sich, dass bei einer solchen freien Aufhängung des Elektromotors an der Antriebswelle, diejenigen Lager, die die Antriebswelle lagern, nicht nur erhebliche Nutzlasten aufnehmen müssen, die im Betrieb des Aufzugs über die Riemen auf die Antriebswelle übertragen werden, sondern auch die Kräfte, die durch die gesamte Gewichtskraft des Elektromotors über die besagte Kupplung auf die Antriebswelle wirken. Diese Kräfte erzeugen insbesondere ein Biegemoment, welches die Lager der Antriebswelle aufnehmen müssen. Da die Gewichtskraft aber oftmals einen Faktor fünf kleiner ausfällt als die Spitzen der Nutzlasten, die beim Betrieb des Aufzugs auftreten, können diese Kräfte durch entsprechende Dimensionierung der Lager aufgefangen werden.
- Ein weiterer Vorteil dieser Konstruktion besteht darin, dass der Elektromotor - aufgrund der freihängenden Konstruktion - frei von einem Maschinenrahmen ausgestaltet werden kann. Das Motorgehäuse kann somit die einzige Struktur sein, die den Elektromotor nach außen abgrenzt.
- Die freie Aufhängung hat den Vorteil, dass der Elektromotor spannungsfrei auf die Antriebswelle ausgerichtet werden kann. Dadurch kann eine Fehlausrichtung und somit eine Wiegebelastung des Antriebsstrangs der Antriebsmaschine, insbesondere im Bereich der Kupplung, (während des Betriebs) vermieden werden. Zudem muss auch keine aufwändige Unterkonstruktion vorhanden sein, zu der der Elektromotor aufwändig ausgerichtet und von welcher dieser getragen wird.
- Der Rotor kann innerhalb des Elektromotors in an sich bekannter Weise durch je ein Lager auf der A-(Abtriebsseite) bzw. B-Seite gelagert sein.
- Zur Lösung der eingangs genannten Aufgabe werden alternativ oder aber ergänzend zu den bislang diskutierten Merkmalen die Merkmale von Anspruch 2 vorgeschlagen. Demnach kann die eingangs eingeführte Antriebsmaschine auch dadurch gekennzeichnet sein, dass ein Rotor des Elektromotors getriebelos und drehfest mit der Antriebswelle über eine lösbare Kupplung verbunden ist und dass mindestens eine Bremsvorrichtung zum Abbremsen der Antriebswelle abtriebsseitig zu der Kupplung, also vorzugsweise zwischen den beidseitigen Lagern der Antriebswelle, angeordnet ist.
- Eine solche Anordnung der mindestens einen Bremsvorrichtung hat Vorteile in Bezug auf die einfache Ausgestaltung der Antriebsmaschine, da die Sicherheit auch dann noch gewährleistet bleibt, wenn die Kupplung nur mittels Reibschluss eine drehfeste Verbindung zwischen dem Rotor und der Antriebswelle bereitstellt. Denn im Falle eines Versagens dieses Reibschlusses kann die von der Antriebsmaschine über die Riemen getragene Last durch Festhalten der Antriebswelle sicher in Position gehalten werden, unabhängig von der Position des Rotors des Elektromotors, d.h. auch bei Versagen der Kupplung.
- Um sehr große Lasten von mehreren Tonnen sicher festhalten zu können, kann die Bremsvorrichtung als Zangen- und/oder Scheibenbremse ausgestaltet sein. Hierbei kann die jeweilige Bremsvorrichtung auch mehrere Bremsbacken umfassen.
- Eine weitere Lösung der eingangs genannten Aufgabe von möglicherweise eigenständiger erfinderischer Qualität ist in Anspruch 3 beschrieben. Somit kann sich die eingangs eingeführte Antriebsmaschine (ergänzend oder alternativ) auch dadurch auszeichnen, dass ein Rotor des Elektromotors getriebelos und drehfest mit der Antriebswelle über eine lösbare Kupplung verbunden ist und dass eine Kupplungsfläche der Kupplung konusförmig ausgebildet ist. Aufgrund der Konusform kann ein Reibschluss im Bereich der Kupplungsfläche erzeugt werden, der die gewünschte drehfeste Verbindung zwischen Antriebswelle und Rotor herstellt.
- Ein solcher Reibschluss kann bevorzugt erzielt sein, indem ein Außenkonus, vorzugsweise mittels einer Verschraubung, auf einen Innenkonus festgezogen ist. Der Außenkonus kann zum Beispiel von der Antriebswelle und der Innenkonus von dem Rotor ausgebildet sein. Es ist aber genauso gut möglich, dass der Außenkonus von dem Rotor und der Innenkonus von der Antriebswelle ausgebildet ist. Ferner kann der Innen- und der Außenkonus alternativ auch von jeweiligen separaten Elementen einer Spannkupplung bereitgestellt werden, wie noch genauer erläutert werden wird.
- Die erwähnte Verschraubung, die den Außenkonus auf den Innenkonus festzieht, kann beispielsweise mittels wenigstens einer Anzugschraube erzielt sein, die in Richtung einer Drehachse der Antriebswelle ausgerichtet ist. Dadurch können axiale Anzugskräfte erzeugt werden, die aufgrund der Konusform der Kupplungsfläche einerseits den gewünschten Reibschluss und damit die drehfeste Verbindung zwischen dem Rotor und der Antriebswelle herstellen und andererseits den Rotor zur Antriebswelle zentrieren. In diesem Fall kann also gerade die Rotationsachse des Rotors mit der Drehachse der Antriebswelle zusammenfallen.
- Die wenigstens eine Anzugschraube kann sich dabei auf einer jeweiligen Schulter beziehungsweise Stufe abstützen, die dasjenige Element (Rotor oder Antriebswelle) ausbildet, welches den Innenkonus ausbildet und/oder in ein Gewinde eingreifen, welches in demjenigen Element (Rotor oder Antriebswelle) ausgebildet ist, welches den Außenkonus ausbildet.
- Wird der Innenkonus beispielsweise am Rotor ausgebildet, so kann im Rotor eine entsprechende Durchführung ausgebildet sein, durch die die Anzugschraube hindurchgeführt ist, damit diese in ein Gewinde in der Antriebswelle eingreifen und so die Antriebswelle (die in diesem Fall den Außenkonus ausbildet) auf den Rotor festziehen kann. Selbstverständlich ist auch eine umgekehrte Realisierung möglich: In diesem Fall kann wenigstens eine Anzugsschraube antriebseitig durch eine Durchführung in der Antriebswelle hindurchgeführt sein, um in ein im Rotor ausgebildetes Gewinde einzugreifen.
- Zur Bereitstellung einer Anzugskraft kann zum Beispiel eine zentral auf der Rotationsachse angeordnete Anzugschraube verwendet werden; es können, alternativ oder ergänzend, aber auch kollinear zur Rotationsachse angeordnete Anzugsschrauben vorgesehen sein.
- Schließlich können zur Lösung der eingangs genannten Aufgabe auch die Merkmale des unabhängigen Anspruchs 4 vorgesehen sein. Die eingangs beschriebene Antriebsmaschine kann sich somit (alternativ oder ergänzend zu den zuvor erläuterten Merkmalen) auch dadurch auszeichnen, dass ein Rotor des Elektromotors getriebelos und drehfest mit der Antriebswelle über eine lösbare Kupplung verbunden ist und dass der Rotor auf einer Seite der Antriebswelle als Hohlwelle und auf einer gegenüberliegenden Seite als Vollwelle ausgebildet ist.
- Diese Ausgestaltung hat neben einer einfachen Fertigung und gleichzeitig robusten Verbindung zwischen Rotor und Antriebswelle den Vorteil, dass vergleichsweise kleine und damit kostengünstige, vorzugsweise optische, Drehgeber an die vom Rotor ausgebildete Vollwelle (auf der B-Seite des Elektromotors) montiert werden können.
- Weitere vorteilhafte Ausführungen der Antriebsmaschine sind in den Unteransprüchen beschrieben und werden im Folgenden erläutert:
Gemäß einer vorteilhaften Ausgestaltung kann vorgesehen sein, dass die Kupplung zumindest teilweise innerhalb eines Gehäuses des Elektromotors angeordnet ist. Insbesondere kann dabei eine Kupplungsfläche der Kupplung (zumindest teilweise bevorzugt jedoch vollständig) innerhalb eines Gehäuses des Elektromotors angeordnet sein. Diese Kupplungsfläche kann somit ein Antriebsmoment des Elektromotors auf die Antriebswelle übertragen. Die Anordnung der Kupplung zumindest teilweise innerhalb des Gehäuses des Elektromotors hat den Vorteil, dass eine Beabstandung zwischen dem Gehäuse des Elektromotors und einer Tragkonstruktion, die die Lager der Antriebswelle trägt, als ein Montagespalt nur so groß ausgebildet werden muss, dass gerade ein Werkzeug (z.B. Drehmomentschlüssel) zur Montage bzw. Demontage der durch die Kupplung bereitgestellten Kupplungsverbindung hineinpasst. Dadurch wird axialer Bauraum eingespart, sodass der axiale Abstand zwischen dem Elektromotor und dem motorseitigen Lager der Antriebswelle so klein wie möglich gewählt werden kann. Dies hat Vorteile, um die mechanische Belastung der Lager zu verringern, was beispielsweise bei einem Eigengewicht des Motors von 1.5 Tonnen von erheblichem Vorteil ist. - Für eine einfache Fertigung des Rotors und der Antriebswelle ist es bevorzugt, wenn die Kupplung eine drehfeste Verbindung zwischen der Antriebswelle und dem Rotor mittels Reibschluss und/oder formschlussfrei bereitstellt bzw. herstellt. Bevorzugt weist die Kupplung dabei keine elastischen Elemente auf, sodass die Kupplung spielfrei ein Antriebsmoment des Elektromotors auf die Antriebswelle übertragen kann.
- Eine besonders bevorzugte Ausgestaltung sieht vor, dass die Kupplung ein Spannelement und ein Gegenspannelement aufweist, d.h. die Kupplung kann als eine Spannkupplung ausgestaltet sein. Das Spannelement und das Gegenspannelement können axial gegeneinander verspannbar bzw. verspannt sein, wobei diese Verspannung bevorzugt mittels einer Verschraubung erzielt werden kann. Das Spannelement kann ferner einen Innenkonus ausbilden, auf dem ein Außenkonus des Gegenspannelements aufliegt (in montiertem Zustand). Somit kann die Kupplung insbesondere als Ringspannelement ausgebildet sein. Bei derartigen Ausgestaltungen kann das Spannelement und das Gegenspannelement somit separat zur Antriebswelle und zum Rotor ausgebildet sein. Auch solche separate Spann- und Gegenspannelemente können aber eine wie zuvor beschrieben konusförmige Kupplungsfläche ausbilden und diese kann auch (zumindest teilweise bevorzugt jedoch vollständig) innerhalb eines Gehäuses des Elektromotors angeordnet sein (im montierten Zustand).
- Bevorzugt ist dabei eine axiale Spannrichtung der Kupplung entlang einer Rotationsachse des Elektromotors ausgerichtet.
- Die Verwendung einer Spannkupplung hat beispielsweise gegenüber einer Klauenkupplung den Vorteil, dass sich nicht durch Verschleiß oder Ermüdung ein Spiel einstellen kann. Dadurch kann die durch die Kupplung hergestellte mechanische Verbindung zwischen Rotor und Antriebswelle weitgehend wartungsfrei über lange Zeiträume sicher betrieben werden.
- Solch ein Spannelement, insbesondere falls als Konus-Spannelement ausgestaltet, kann somit eine Innenspannverbindung bereitstellen, mit der sich der Rotor des Elektromotors spielfrei auf der Antriebswelle (bei der Montage der Antriebsmaschine) befestigen lässt. Hierbei kann sowohl der Rotor als auch die Antriebswelle im Kupplungsbereich rotationssymmetrisch ausgestaltet werden, was die Fertigung vereinfacht. Auf eine formschlüssige Verbindung kann somit verzichtet werden. Gerade Ringspannelemente wurde bislang beispielsweise für die Befestigung von Ketten-, Schwungrädern, Hebeln, Riemen-, Bremsscheiben oder Förderbandtrommeln eingesetzt.
- Bevorzugt kann die Antriebswelle oder aber der Rotor (je nach Ausgestaltung) eine Stufe ausbilden, die als mechanischer Anschlag für das radial innenliegende Gegenspannelement dient.
- Um die Montage des Elektromotors auf der Antriebswelle zu vereinfachen, kann vorgesehen sein, dass zwischen einem motorseitigen Lager der Antriebswelle und dem Elektromotor ein Montagespalt ausgebildet bzw. freigehalten ist (im fertigmontierten Zustand der Antriebsmaschine). Dadurch kann erreicht werden, dass die Kupplung mittels Handwerkzeugen bei der Montage festgezogen und später auch wieder (auf dieselbe Weise) gelöst werden kann. Der Montagespalt kann zum Beispiel 10 cm breit oder sogar noch schmaler ausgestaltet sein.
- Eine Kupplungsfläche der Kupplung (also insbesondere die zuvor erwähnte Kupplungsfläche) kann so positioniert sein, dass sie in axialer Richtung eine Radialebene durchstößt, in welcher ein A-Lager des Elektromotors angeordnet ist, welches den Rotor lagert. Mit anderen Worten kann somit die Kupplung axial in einem Bereich ausgestaltet sein, in welchem der Rotor des Elektromotors von dem A-Lager gelagert ist. Eine solche Anordnung der Kupplung hat den Vorteil, dass der Hebelarm, der zwischen der Kupplungsfläche und dem Schwerpunkt des Elektromotors besteht, verkürzt werden kann. Dadurch kann die aufgrund der Gewichtskraft des Elektromotors auf die Kupplung wirkende mechanische Belastung reduziert werden.
- Ferner ist es vorteilhaft, wenn die Kupplung in axialer Richtung in ein Gehäuse des Elektromotors hinein versenkt ist. Dies kann insbesondere derart ausgestaltet sein, dass das Gehäuse, in axialer Richtung und auf die Antriebswelle hin, die Kupplung übersteht.
- Durch das Zurückversetzen der Kupplung in axialer Richtung weg von der Antriebswelle wird einerseits erreicht, dass der Montagespalt schmaler ausgebildet werden kann, was die Länge der gesamten Anordnung in axialer Richtung reduziert. Andererseits kann so die mechanische Belastung der Kupplung reduziert werden.
- Gemäß einer möglichen Ausgestaltung ist der Rotor antriebswellenseitig als Hohlwelle ausgebildet und die Antriebswelle bildet einen Zapfen aus, der in den Rotor eingreift. Dadurch kann der Zapfen der Antriebswelle eine Rotationsachse des Rotors (im Raum) festlegen. Der Rotor und damit der Elektromotor wird in diesem Fall bei der Montage auf den Zapfen der Antriebswelle aufgesteckt.
- Eine hierzu alternative Ausgestaltung sieht vor, dass die Antriebswelle motorseitig als Hohlwelle ausgebildet ist und der Rotor des Elektromotors einen Zapfen ausbildet, der in die Antriebswelle eingreift. Auch in diesem Fall kann die Antriebswelle die Rotationsachse des Rotors festlegen. Der Rotor und damit der Elektromotor wird in diesem Fall bei der Montage mit seinem Zapfen in die Antriebswelle eingesteckt.
- Mit anderen Worten kann also der besagte Zapfen sowohl motorseitig als auch auf der Seite der Antriebswelle (d. h. von dieser) ausgebildet werden. Die Wahl der Variante kann beispielsweise abhängig davon getroffen werden, in welchen anderen Antriebsmaschinen der Elektromotor noch zum Einsatz kommen soll.
- Um zu verhindern, dass sich das Motorgehäuse des Elektromotors beim Bestromen des Elektromotors mit dreht, kann eine Winkelposition eines Gehäuses des Elektromotors in Bezug auf eine Rotationsachse des Elektromotors über eine Drehmomentstütze festgelegt sein. Dadurch kann insbesondere eine Winkelposition eines Stators des Elektromotors festlegt werden/sein. Hierbei ist es bevorzugt, wenn die Drehmomentstütze über wenigstens ein Lager mit dem Gehäuse des Elektromotors verbunden ist. Denn in diesem Fall kann die Drehmomentstütze ausschließlich die Winkelposition festlegen, aber gerade keine sonstigen Freiheitsgrade einer Position des Elektromotors im Raum. Insbesondere kann dann die Drehmomentstütze keine Axialkräfte in Bezug auf eine Drehachse der Antriebswelle aufnehmen. Die Drehmomentstütze kann ferner bevorzugt in dem erwähnten Montagespalt angeordnet sein.
- Die Drehmomentstütze verhindert somit lediglich ein Mitdrehen des Motorgehäuses und damit eines Stators des Elektromotors, wenn der Elektromotor bestromt wird. Die Drehmomentstütze fängt jedoch nicht die Gewichtskraft des Elektromotors ab, weswegen die Drehmomentstütze auch typischerweise erst nach erfolgter Montage des Elektromotors auf der Antriebswelle montiert werden kann.
- Die Antriebsmaschine kann auch eine Tragkonstruktion umfassen, die die Antriebswelle (genauer die Lager der Antriebswelle) trägt. Bevorzugt trägt die Tragkonstruktion ferner wenigstens eine Umlenkrolle, wobei die Umlenkrolle dem Umlenken des wenigstens einen Riemens der Antriebsmaschine dienen kann. Um die Antriebsmaschine mit unterschiedlichen Aufzügen nutzen zu können ist es dabei vorteilhaft, wenn ein Abstand der Umlenkrolle zu der Antriebswelle (mithilfe der Tragkonstruktion) einstellbar ist.
- Die zuvor erwähnte Drehmomentstütze kann dabei an der Tragkonstruktion abgestützt sein. In diesem Fall kann also die Tragkonstruktion ein Gegenmoment zum Antriebsmoment des Elektromotors bereitstellen. Abgesehen von der Drehmomentstütze und der notwendigen Verbindung zwischen der Antriebswelle und dem Rotor des Elektromotors, kann der Elektromotor jedoch sonst keinerlei Verbindung zu der Tragkonstruktion aufweisen und somit vollständig frei im Raum hängend montiert sein.
- Die eingangs erwähnte Bremsvorrichtung kann insbesondere als eine elektromechanische Haltebremse zum Festhalten der Antriebswelle ausgestaltet sein. Hierbei kann eine Bremsscheibe der Bremsvorrichtung drehfest mit der Antriebswelle verbunden sein. Um Sicherheitsnormen zu erfüllen, kann die elektromechanische Haltebremse so ausgestaltet sein, dass sie nur in bestromten Zustand lüftet, hingegen im unbestromten Zustand bremst und in diesem Fall die Antriebswelle sicher festhalten kann (also insbesondere bei Verlust der Stromversorgung).
- Der Elektromotor der Antriebsmaschine kann bevorzugt ein permanentmagneterregter Elektromotor sein. Insbesondere kann also der Rotor des Elektromotors Permanentmagnete aufweisen. Ferner ist es für einen effizienten Betrieb vorteilhaft, wenn der Elektromotor zudem als eine Synchronmaschine ausgestaltet ist.
- Die Erfindung wird nun anhand von Ausführungsbeispielen näher beschrieben, ist aber nicht auf diese Ausführungsbeispiele beschränkt. Für den Fachmann ergeben sich weitere Ausbildungen der Erfindung aus der nachfolgenden Beschreibung eines bevorzugten Ausführungsbeispiels unter Berücksichtigung der vorherigen allgemeinen Beschreibung, sowie den Merkmalen, die den Ansprüchen und den Zeichnungen entnommen werden können.
- Es zeigt:
- Fig. 1
- Ein seitliche Schnittansicht (entgegen der x-Richtung) auf eine erfindungsgemäße Antriebsmaschine, wobei die Antriebswelle und der Rotor des Elektromotors mittig geschnitten sind,
- Fig. 2
- eine Seitenansicht von vorne entgegen der y-Richtung auf die Antriebsmaschine der
Figur 1 , - Fig. 3
- eine Aufsicht von oben (in z-Richtung) auf die Antriebsmaschine der
Figur 1 , - Fig. 4
- eine perspektivische Ansicht auf die Antriebsmaschine der
Figur 1 , - Fig. 5
- eine weitere perspektivische Sicht auf die Antriebsmaschine der
Figur 1 von Schräg hinten mit Blick auf den frei aufgehängten Elektromotor, - Fig. 6
- eine Detail der Schnittansicht der
Figur 1 mit Blick auf den Kupplungsbereich zwischen Antriebswelle und Elektromotor, - Fig. 7
- eine Detail der Schnittansicht der
Figur 1 mit Blick auf die Rotorwelle des Elektromotors, - Fig. 8
- weitere Details der zwischen dem Rotor des Elektromotors und der Antriebswelle ausgebildeten Kupplung und
- Fig. 9
- eine weitere mögliche Ausgestaltung einer erfindungsgemäßen Antriebsmaschine 1.
- Die
Figur 1 zeigt eine seitliche Schnittansicht durch eine erfindungsgemäße Antriebsmaschine 1, die eine Antriebswelle 3 und einen als eine Synchronmaschine ausgestalteten Elektromotor 2 umfasst. Wie aus den weiterenFiguren 2 bis 5 zu erkennen ist, die weitere Ansichten der Antriebsmaschine 1 ausFigur 1 zeigen, ist die Antriebswelle 3 als eine Riemenwelle ausgestaltet und treibt insgesamt fünf Riemen 5 an, die als Flachriemen ausgebildet sind. - Wie in der Schnittansicht der
Figur 1 zu sehen ist, ist die Antriebswelle 3 beidseitig in jeweiligen Lagern 4a und 4b gelagert und kann mittels des Elektromotors 2 angetrieben werden. Hierfür ist ein Rotor 6 des Elektromotors 2, welcher Permanentmagnete trägt, getriebelos und drehfest mit der Antriebswelle 3 über eine lösbare Kupplung 7 verbunden. In der Schnittansicht derFigur 1 und noch besser in den Detailansichten dieser Schnittansicht gemäß denFiguren 6 bis 8 ist ferner zu erkennen, dass der Rotor 6 auf der Seite der Antriebswelle 3 als Hohlwelle 11 ausgebildet ist. Auf der gegenüberliegenden Seite ist der Rotor 6 hingegen als Vollwelle 25 ausgebildet. Wie man inFigur 7 erkennt, ist ein optischer Drehgeber 21 in Form eines Winkel-Encoders stirnseitig am Rotor 6, genauer an der Vollwelle 25, montiert, damit die aktuelle Position des Rotors 6 sensorisch erfasst werden kann. - Die Antriebswelle 3 bildet hingegen motorseitig einen Zapfen 12 aus, der in den Rotor 6, also genauer in die Hohlwelle 11, eingesteckt ist. Hierbei legt gerade der Zapfen 12 bzw. die Drehachse 15 der Antriebswelle 3, die Rotationsachse 14 des Rotors 6 des Elektromotors 2 fest. Alternativ könnte aber auch die Antriebswelle 3 motorseitig als Hohlwelle 11 ausgebildet werden. In diesem Fall würde der Rotor 6 einen Zapfen 12 ausbilden, der dann in die Antriebswelle 3 eingreift. Bei einer solchen Konstruktion könnte eine analoge Spannkupplung 7, die in den Figuren gezeigt ist, verwendet werden, lediglich in umgekehrter Einbaurichtung.
- Wie gerade anhand der Ansichten der
Figur 4 und5 zu erkennen ist, ist der Elektromotor 2 somit mittels der Kupplung 7 frei im Raum an der Antriebswelle 3 aufgehängt, wobei die Antriebswelle 3 ihrerseits über die Lager 4a, 4b auf einer Tragkonstruktion 27 abgestützt ist. Somit trägt die Antriebswelle 3 den Elektromotor 2. Die beiden Lager 4a und 4b der Antriebswelle 3 nehmen somit nicht nur die Kräfte auf, die über die Riemen 5 auf die Antriebswelle 3 übertragen werden, sondern auch die gesamte Gewichtskraft des Elektromotors 2. Der Elektromotor 2 verfügt zwar über mehrere Aufstellfüße 9, die dazu dienen, den Elektromotor 2 temporär sicher abstellen zu können; im montierten Zustand hängen diese Aufstellfüße 9 jedoch in der Luft, wie in den Ansichten derFigur 4 undFigur 5 gut zu erkennen ist. - Wie die
Figur 6 und noch besser dieFigur 8 zeigen, stellt die Kupplung 7 eine drehfeste Verbindung zwischen der Antriebswelle 3 und dem Rotor 6 mittels Reibschluss und ohne jeglichen Formschluss her. Insbesondere weist die Kupplung 7 keinerlei elastische Elemente auf. - Wie die
Figur 8 zeigt, ist die Kupplung 7 als eine Spannkupplung ausgestaltet und umfasst ein Spannelement 16 und ein zugehöriges Gegenspannelement 17, die axial mittels einer Verschraubung 20 gegeneinander verspannt sind. Hierbei bildet das (radial außen liegende) Spannelement 16 einen Innenkonus 18 aus, auf dem ein Außenkonus 19 aufliegt, der von dem (radial innen liegenden) Gegenspannelement 17 ausgebildet wird. Diese Elemente 17, 18, 20 bilden somit ein Ringspannelement. Das innere Gegenspannelement 17 stützt sich dabei axial auf einer Stufe 22 ab, die außen umfangsseitig in der Antriebswelle 3, im Bereich der Kupplung 7, ausgebildet ist. Die Spannkupplung 7 bietet dabei ein konusförmige Kupplungsfläche 30, die einen gewünschten Reibschluss herstellt. - Wie man anhand der beiden gestrichelten vertikalen Linien in
Figur 8 und der Zusammenschau derFiguren 7 und 8 erkennt, ist eine Kupplungsfläche 30 der Kupplung 7, die ein Antriebsmoment des Elektromotors 2 auf die Antriebswelle 3 überträgt, also gerade die Kontaktfläche zwischen dem Innenkonus 18 und dem Außenkonus 19, die den gewünschten Reibschluss bereitstellt, innerhalb des Gehäuses 8 des Elektromotors 2 angeordnet. Die Kupplung 7 ist dabei so weit in axialer Richtung in den Elektromotor 2 hineinversetzt, dass die besagte Kupplungsfläche 30 eine Radialebene durchstößt, in welcher das in denFiguren 7 und 8 zu erkennende A-Lager 23 des Elektromotors 2 angeordnet ist, welches den Rotor 6 lagert (vergleiche dazu die gepunkteten Linien inFigur 8 ). - Wie die Detailansicht der
Figur 6 zeigt, ist zwischen dem motorseitigen Lager 4b der Antriebswelle 3 und dem Elektromotor 2 ein Montagespalt 13 freigehalten. Dies ermöglicht es, bei der Montage des Elektromotors 2 auf der Antriebswelle 3 die Kupplung 7 mittels Handwerkzeugen festzuziehen und später auch wieder zu lösen, da der Montagespalt 13 ausreichend groß ausgestaltet ist, um mit den Handwerkzeugen an die Verschraubung 20 der Kupplung 7 zu gelangen. - Ferner ist in
Figur 8 gut zu erkennen, dass die Kupplung 7 in axialer Richtung in das Gehäuse 8 des Elektromotors 2 hinein versenkt ist. Denn das Gehäuse 8 steht in axialer Richtung auf die Antriebswelle 3 hin über die Kupplung 7 über (vergleiche die gestrichelte Linie inFigur 8 ). - In den
Figuren 1 ,3 , sowie 5 bis 7 ist zudem eine Drehmomentstütze 10 zu erkennen. Die Drehmomentstütze 10 weist einen Zapfen 32 auf, der mittels einer Verschraubung 20 mit dem Gehäuse 8 des Elektromotors 2 verbunden ist (vergleicheFigur 7 ). Hierbei ist der Zapfen 32 in einem Lager 4 der Drehmomentstütze 10 drehbar und axial verschieblich gelagert. - In den
Figuren 3 und5 ist gut zu erkennen, dass die Drehmomentstütze 10 mit einem zweiten Lager 4 an der Tragkonstruktion 27 montiert ist. Aufgrund der beiden Lager 4 der Drehmomentstütze 9 kann diese zwar eine Winkelposition des Gehäuses 8 des Elektromotors 2 in Bezug auf eine Rotationsachse 14 des Elektromotors 2 festlegen (Vgl.Fig. 1 ) und damit verhindern, dass das Gehäuse 8 mit rotiert, wenn der Elektromotor 2 bestromt wird. Die Drehmomentstütze 10 kann jedoch gerade keine sonstigen Freiheitsgrade der Position des Elektromotors 2 im Raum festlegen und zudem auch keine Axialkräfte in Bezug auf die Drehachse 15 der Antriebswelle 3 aufnehmen (Vgl.Fig. 7 ). Dadurch wird eine Überbestimmung vermieden und es wird durch die Drehmomentstütze 10 ausschließlich die Winkelposition des Elektromotors 2 festgelegt. Ansonsten ist der Elektromotor 2 frei im Raum an der Antriebswelle 3 aufgehängt. Wie man gut inFigur 6 erkennt, ist die Drehmomentstütze 10 in dem Montagespalt 13 angeordnet. - Wie die
Figur 2 zeigt, umfasst die Antriebsmaschine 1 zudem eine Umlenkrolle 28, die die insgesamt fünf Tragriemen 5 umlenkt, wobei auch andere Anzahlen von Riemen 5 verwendet werden können. Wie mittels des Blockpfeils inFigur 2 illustriert ist, kann die Umlenkrolle 28 auf der Tragkonstruktion 27 verschoben werden, sodass ein Abstand der Umlenkrolle 28 zu der Antriebswelle 2 (in x-Richtung inFigur 2 ) einstellbar ist. Auch in denFiguren 3 und 4 sind beide Positionen der einzigen Umlenkrolle 28 illustriert (man beachte auch dort die Blockpfeile). - Wie die Bezugszeichen 33 und 34 in
Figur 2 zeigen, kann eine erste Riemenseite 33 zur Kabine des Aufzugs oder zu einem Gegengewicht verlaufen. Entsprechend kann dann die zweite Riemenseite 34 zum Gegengewicht beziehungsweise zur Kabine verlaufen, je nach Ausgestaltung des Aufzugsschachts. Somit kann die erfindungsgemäße Antriebsmaschine 1 in unterschiedlichen Aufzugs-Konstellationen eingesetzt werden. - In
Figur 2 undFigur 4 ist gut zu erkennen, dass die Antriebsmaschine 1 auch eine Bremsvorrichtung 26 zum Abbremsen der Antriebswelle 3 umfasst. Diese Bremsvorrichtung 26 ist als eine elektromagnetische Haltebremse ausgestaltet und weist eine Bremsscheibe 29 auf, die drehfest mit der Antriebswelle 3 verbunden ist. Die Bremsbacken der Bremsvorrichtung 26 wirken somit auf die Bremsscheibe 29 und bremsen dadurch die Antriebswelle 3 ab und können diese auch in einer bestimmten Drehposition festhalten. - Wie man in
Figur 1 sowie in denFiguren 3 und 4 erkennen kann, ist die Bremsvorrichtung 26 zwischen den beidseitigen Lagern 4a und 4b der Antriebswelle 3 angeordnet und somit gerade abtriebsseitig zu der Kupplung 7 (also auf Seite der Antriebswelle 3 und nicht auf Seiten des Elektromotors 2). Selbst dann also, wenn beispielsweise der Reibschluss der Kupplung 7 versagen sollte und somit die drehfeste Verbindung zwischen dem Rotor 6 und der Antriebswelle 3 aufgelöst wäre, kann die Bremsvorrichtung 26 die Antriebswelle 3 sicher festhalten. Hierbei ist die Bremsvorrichtung 26 gerade so ausgestaltet, dass die Haltekraft im unbestromten Zustand (aufgrund eines mechanischen Rückstellelements) ausgeübt wird. - Die
Figur 9 zeigt eine weitere mögliche Ausgestaltung einer erfindungsgemäßen Antriebsmaschine 1, wobei hier jedoch kein separates Ringspannelement als Kupplung 7 verwendet wird, sondern die Kupplung 7 direkt durch die Antriebswelle 3 und den Rotor 6 ausgebildet ist. Wie zu sehen, ist der Rotor 6 antriebsseitig erneut als Hohlwelle 11 ausgebildet und bietet so eine Aufnahme, in die die Antriebswelle 3 eingesteckt ist, d.h. der Elektromotor 2 ist hier auf die Antriebswelle 3 aufgesteckt. Am rechten Ende der Aufnahme bildet der Rotor 6 einen Innenkonus 18 aus, der zu einem Außenkonus 19 passt, den die Antriebswelle 3 an ihrem motorseitigen Ende ausbildet. Zwischen der Antriebswelle 3 und dem Rotor 6 ist somit eine konusförmige Kupplungsfläche 30 ausgebildet. Man erkennt ferner, dass eine Anzugschraube 31, die zentral auf und entlang der Rotationsachse 14 des Rotors 6 angeordnet ist, durch eine Durchführung im Rotor 6 bis zur Antriebswelle 3 hindurchgeführt ist und dort in der Antriebswelle 3 in ein Gewinde eingreift. Hierbei stützt sich die Anzugsschraube 31 auf einer Stufe/Schulter 22 ab, die am Rotor 6 ausgebildet ist. Mittels dieser Verschraubung 20 kann somit eine Anzugskraft erzeugt werden, die den Rotor 6, genauer dessen Innenkonus 18, auf den Außenkonus 19 der Antriebswelle 3 zieht beziehungsweise die Antriebswelle 3 auf den Rotor 6, je nachdem welcher Teil festgehalten wird. Durch die Anzugskraft wird ein Reibschluss zwischen der Antriebswelle 3 und dem Rotor 6 hergestellt, wodurch die gewünschte drehfeste Verbindung und damit ein Direktantrieb der Antriebswelle 3 erreicht wird. Zudem wird mittels der konusförmigen Kupplungsfläche 30 der Rotor 6 auf die Antriebswelle 3 zentriert, sodass die Rotationsachse 14 des Rotors 6 und die Drehachse 15 der Antriebswelle 3 zusammenfallen. - Selbstverständlich könnte der Innenkonus 18 beispielsweise auch an der Antriebswelle 3 ausgestaltet werden. In diesem Fall könnte der Rotor 6 in die Antriebswelle 3 eingesteckt und der Reibschluss zur Antriebswelle 3 mittels eines passenden Außenkonus 19 am antriebsseitigen Ende des Rotors 6 hergestellt werden. Die Anzugschraube 31 könnte in einem solchen Fall auch zum Beispiel (in
Figur 9 von links nach rechts) durch eine Durchführung in der Antriebswelle 3 bis in ein Gewinde geführt sein, dass im Rotor 6 ausgebildet ist. In diesem Fall wäre die Antriebswelle 3 somit (zumindest abschnittsweise) als Hohlwelle 11 ausgebildet. - Zusammenfassend wird zur einfacheren Transportierbarkeit einer Antriebsmaschine 1, die zum Bewegen einer Aufzugskabine in einem Schacht vorgesehen ist, vorgeschlagen, einen Direktantrieb derart auszugestalten, dass ein Elektromotor 2 der Antriebsmaschine 1 auf eine Antriebswelle 3, die dem Antreiben von wenigstens einem Riemen 5 (ausgestaltet als Flachriemen oder als Profil-Riemen) dient, aufgesteckt oder in die Antriebswelle 3 eingesteckt wird/ist, sodass der Elektromotor 2 freitragend an der Antriebswelle 3 aufgehängt ist. Eine solche Ausgestaltung bietet den Vorteil, dass die Antriebsmaschine 1 vergleichsweise einfach montiert/demontiert und die einzelnen Bestandteile separat voneinander zum Aufstellungsort transportiert werden können (vergleiche
Fig. 1 ) . -
- 1
- Antriebsmaschine
- 2
- Elektromotor
- 3
- Antriebswelle
- 4
- Lager
- 5
- Riemen, insbesondere Flachriemen oder Profil-Riemen
- 6
- Rotor
- 7
- Kupplung
- 8
- Gehäuse (von 2)
- 9
- Aufstellfüße (von 8, nicht genutzt in der freien Aufhängung!)
- 10
- Drehmomentstütze
- 11
- Hohlwelle
- 12
- Zapfen (von 3)
- 13
- Montagespalt
- 14
- Rotationsachse (von 2/6)
- 15
- Drehachse (von 3)
- 16
- Spannelement
- 17
- Gegenspannelement
- 18
- Innenkonus (von 16)
- 19
- Außenkonus (von 17)
- 20
- Verschraubung
- 21
- Drehgeber (insbesondere Winkel-Encoder)
- 22
- Stufe bzw. Schulter
- 23
- A-Lager (von 2, abtriebsseitig, also auf der Seite von 3)
- 24
- B-Lager (von 2)
- 25
- Vollwelle
- 26
- Bremsvorrichtung (diese kann auch mehrere Bremsvorrichtungen, insbesondere mehrere Bremsbacken, umfassen)
- 27
- Tragkonstruktion
- 28
- Umlenkrolle (für 5)
- 29
- Bremsscheibe
- 30
- Kupplungsfläche (von 7, insbesondere zwischen 16 und 17)
- 31
- Anzugsschraube
- 32
- Zapfen (von 10)
- 33
- erste Riemenseite
- 34
- zweite Riemenseite
Claims (17)
- Antriebsmaschine (1) für einen Aufzug, umfassend- einen Elektromotor (2),- eine mittels des Elektromotors (2) antreibbare und beidseitig in jeweiligen Lagern (4a, 4b) gelagerte Antriebswelle (3),- insbesondere wobei die Antriebswelle (3) zum Antreiben wenigstens eines Riemens (5), insbesondere eines Flachriemens (5) oder eines Profil-Riemens (5), ausgebildet ist, dadurch gekennzeichnet,- dass ein Rotor (6) des Elektromotors (2) getriebelos und drehfest mit der Antriebswelle (3) über eine lösbare Kupplung (7) verbunden ist und- dass der Elektromotor (2) mittels der Kupplung (7) frei im Raum an der Antriebswelle (3) aufgehängt ist,- vorzugsweise sodass die Antriebswelle (3) den Elektromotor (2) trägt.
- Antriebsmaschine (1) nach dem Oberbegriff von Anspruch 1, vorzugsweise gemäß Anspruch 1, dadurch gekennzeichnet,- dass ein Rotor (6) des Elektromotors (2) getriebelos und drehfest mit der Antriebswelle (3) über eine lösbare Kupplung (7) verbunden ist und- dass mindestens eine Bremsvorrichtung (26) zum Abbremsen der Antriebswelle (3) abtriebsseitig zu der Kupplung (7), vorzugsweise zwischen den beidseitigen Lagern (4a, 4b) der Antriebswelle (3), angeordnet ist.
- Antriebsmaschine (1) nach dem Oberbegriff von Anspruch 1, vorzugsweise gemäß Anspruch 1 oder gemäß Anspruch 2, dadurch gekennzeichnet,- dass ein Rotor (6) des Elektromotors (2) getriebelos und drehfest mit der Antriebswelle (3) über eine lösbare Kupplung (7) verbunden ist und- dass eine Kupplungsfläche (30) der Kupplung (7) konusförmig ausgebildet ist,- vorzugsweise wobei ein Reibschluss im Bereich der Kupplungsfläche (30) erzeugt ist, indem ein Außenkonus (19), vorzugsweise mittels einer Verschraubung (20), auf einen Innenkonus (18) festgezogen ist.
- Antriebsmaschine (1) nach Anspruch 3, wobei- der Außenkonus (19) von der Antriebswelle (3) und der Innenkonus (18) von dem Rotor (6) ausgebildet ist
oder- der Außenkonus (19) von dem Rotor (6) und der Innenkonus (18) von der Antriebswelle (3) ausgebildet ist. - Antriebsmaschine (1) nach dem Oberbegriff von Anspruch 1, vorzugsweise gemäß einem der Ansprüche 1 bis 4, dadurch gekennzeichnet,- dass ein Rotor (6) des Elektromotors (2) getriebelos und drehfest mit der Antriebswelle (3) über eine lösbare Kupplung (7) verbunden ist und- dass der Rotor (6) auf einer Seite der Antriebswelle (3) als Hohlwelle (11) und auf einer gegenüberliegenden Seite als Vollwelle (25) ausgebildet ist.
- Antriebsmaschine (1) nach einem der vorhergehenden Ansprüche, wobei die Kupplung (7),- insbesondere eine, insbesondere die konusförmige, Kupplungsfläche (30) der Kupplung (7),zumindest teilweise innerhalb eines Gehäuses (8) des Elektromotors (2) angeordnet ist.
- Antriebsmaschine (1) nach einem der vorhergehenden Ansprüche, wobei die Kupplung (7) eine drehfeste Verbindung zwischen der Antriebswelle (3) und dem Rotor (6) mittels Reibschluss und/oder formschlussfrei bereitstellt,- vorzugsweise wobei die Kupplung (7) keine elastischen Elemente aufweist und daher spielfrei ein Antriebsmoment des Elektromotors (2) auf die Antriebswelle (3) übertragen kann.
- Antriebsmaschine (1) nach einem der vorhergehenden Ansprüche, wobei die Kupplung (7) ein Spannelement (16) und einen Gegenspannelement (17) aufweist, die axial, vorzugsweise mittels einer Verschraubung (20), gegeneinander verspannbar beziehungsweise verspannt sind,- vorzugsweise wobei das Spannelement (16) einen Innenkonus (18) ausbildet auf dem ein Außenkonus (19) des Gegenspannelements (17) aufliegt und/oder- wobei die Kupplung (7) als Ringspannelement ausgebildet ist.
- Antriebsmaschine (1) nach einem der vorhergehenden Ansprüche, wobei zwischen einem motorseitigen Lager (4b) der Antriebswelle (3) und dem Elektromotor (2) ein Montagespalt (13) ausgebildet ist, sodass die Kupplung (7) mittels Handwerkzeugen bei der Montage festgezogen und später auch wieder gelöst werden kann.
- Antriebsmaschine (1) nach einem der vorhergehenden Ansprüche, wobei eine, insbesondere die, Kupplungsfläche (30) der Kupplung (7) in axialer Richtung eine Radialebene durchstößt, in welcher ein A-Lager (23) des Elektromotors angeordnet ist, welches den Rotor (6) lagert.
- Antriebsmaschine (1) nach einem der vorhergehenden Ansprüche, wobei die Kupplung (7) in axialer Richtung in ein Gehäuse (8) des Elektromotors (2) hinein versenkt ist,- insbesondere derart, dass das Gehäuse (8) in axialer Richtung und auf die Antriebswelle (3) hin die Kupplung (7) übersteht.
- Antriebsmaschine (1) nach einem der vorhergehenden Ansprüche, wobei der Rotor (6) antriebswellenseitig als Hohlwelle (11) ausgebildet ist und die Antriebswelle (3) einen Zapfen (12) ausbildet, der in den Rotor (6) eingreift, insbesondere wobei der Zapfen (12) eine Rotationsachse (14) des Rotors (6) festlegt.
- Antriebsmaschine (1) nach einem der vorhergehenden Ansprüche 1 bis 9, wobei die Antriebswelle (3) motorseitig als Hohlwelle (11) ausgebildet ist und der Rotor (6) des Elektromotors (2) einen Zapfen (12) ausbildet, der in die Antriebswelle (3) eingreift, insbesondere wobei die Antriebswelle (3) die Rotationsachse (14) des Rotors (2) festlegt.
- Antriebsmaschine (1) nach einem der vorhergehenden Ansprüche, wobei eine Winkelposition eines Gehäuses (8) des Elektromotors (2) in Bezug auf eine Rotationsachse (14) des Elektromotors (2) über eine Drehmomentstütze (10) festgelegt ist,- vorzugsweise wobei die Drehmomentstütze (10) über wenigstens ein Lager (4) mit dem Gehäuse (8) verbunden ist, sodass die Drehmomentstütze (10) ausschließlich die Winkelposition festlegt aber keine sonstigen Freiheitsgrade einer Position des Elektromotors (2) im Raum, insbesondere und keine Axialkräfte in Bezug auf eine Drehachse (15) der Antriebswelle (3) aufnehmen kann und/oder in dem Montagespalt (13) angeordnet ist.
- Antriebsmaschine (1) nach einem der vorhergehenden Ansprüche, wobei die Antriebsmaschine (1) eine Tragkonstruktion (27) umfasst, die die Antriebswelle (3), vorzugsweise und wenigstens eine, vorzugsweise in ihrem Abstand zur Antriebswelle (3) einstellbare, Umlenkrolle (28) trägt,- vorzugsweise wobei die Drehmomentstütze (10) an der Tragkonstruktion (27) abgestützt ist, insbesondere sodass die Tragkonstruktion (27) ein Gegenmoment zum Antriebsmoment des Elektromotors (2) bereitstellen kann.
- Antriebsmaschine (1) nach einem der vorhergehenden Ansprüche 2 bis 13, wobei die Bremsvorrichtung (26) als eine elektromechanische Haltebremse zum Festhalten der Antriebswelle (3) ausgestaltet ist, vorzugsweise wobei eine Bremsscheibe (29) der Bremsvorrichtung (26) drehfest mit der Antriebswelle (3) verbunden ist.
- Antriebsmaschine (1) nach einem der vorhergehenden Ansprüche, wobei der Elektromotor (2) ein permanentmagneterregter Elektromotor (2) ist, insbesondere wobei der Rotor (6) Permanentmagnete aufweist,- vorzugsweise wobei der Elektromotor (2) als Synchronmaschine ausgestaltet ist.
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102022109725.0A DE102022109725A1 (de) | 2022-04-22 | 2022-04-22 | Modulare Antriebsmaschine für einen Aufzug |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP4265556A1 true EP4265556A1 (de) | 2023-10-25 |
| EP4265556B1 EP4265556B1 (de) | 2025-02-12 |
Family
ID=86051865
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP23168005.9A Active EP4265556B1 (de) | 2022-04-22 | 2023-04-14 | Antriebsmaschine für einen aufzug |
Country Status (2)
| Country | Link |
|---|---|
| EP (1) | EP4265556B1 (de) |
| DE (1) | DE102022109725A1 (de) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102024104740A1 (de) * | 2024-02-20 | 2025-03-06 | Tk Elevator Innovation And Operations Gmbh | Riementriebeinheit für Aufzugsanlagen, Aufzugsanlage sowie Verfahren und Verwendung |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2009075670A1 (en) * | 2007-12-10 | 2009-06-18 | Otis Elevator Company | Elevator machine assembly including torque-based motor control |
| DE102016120645A1 (de) * | 2016-10-28 | 2018-05-03 | Logos-Innovationen Gmbh | Hebevorrichtung, insbesondere Aufzug oder Hebebühne |
| WO2019121955A1 (en) * | 2017-12-19 | 2019-06-27 | Thyssenkrupp Elevator Ag | Elevator drive unit |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE19924735A1 (de) | 1999-05-31 | 2001-03-15 | Sew Eurodrive Gmbh & Co | Baureihe von Elektromotoren mit Drehzahlrückführung und Elektromotor mit Drehzahlrückführung |
| DE102004047431A1 (de) | 2003-10-01 | 2005-04-21 | Logos Innovationen Gmbh | Hebevorrichtung, insbesondere Aufzug oder Hebebühne |
| DE202005015876U1 (de) | 2005-10-07 | 2005-12-29 | Bullinger, Rudolf | Vorrichtung zum hilfsweisen Antrieb eines Rads |
| DE102010029071A1 (de) | 2010-05-18 | 2011-11-24 | Bayerische Motoren Werke Aktiengesellschaft | Radantrieb für ein Fahrzeug |
| DE102014011929A1 (de) | 2014-08-14 | 2016-02-18 | Fromm Holding Ag | Antriebseinheit für ein Umreifungsgerät |
-
2022
- 2022-04-22 DE DE102022109725.0A patent/DE102022109725A1/de not_active Withdrawn
-
2023
- 2023-04-14 EP EP23168005.9A patent/EP4265556B1/de active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2009075670A1 (en) * | 2007-12-10 | 2009-06-18 | Otis Elevator Company | Elevator machine assembly including torque-based motor control |
| DE102016120645A1 (de) * | 2016-10-28 | 2018-05-03 | Logos-Innovationen Gmbh | Hebevorrichtung, insbesondere Aufzug oder Hebebühne |
| WO2019121955A1 (en) * | 2017-12-19 | 2019-06-27 | Thyssenkrupp Elevator Ag | Elevator drive unit |
Also Published As
| Publication number | Publication date |
|---|---|
| DE102022109725A1 (de) | 2023-10-26 |
| EP4265556B1 (de) | 2025-02-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| DE69909133T2 (de) | Aufzugsantrieb mit gegenläufigen rotoren | |
| DE69420329T2 (de) | Im Gegengewicht eingebauter Aufzugsmotor | |
| EP3440003A1 (de) | Antriebseinheit für eine aufzugsanlage | |
| EP3317222A1 (de) | Hubwindenanordnung | |
| AT516038B1 (de) | Antriebsstrang | |
| DE3216978A1 (de) | Kaefiglaeufermotor fuer ein hebezeug, insbesondere fuer einen aufzug | |
| EP3668662A1 (de) | Direktantrieb bei rollen, walzen und winden in der stahl/ne-industrie | |
| EP4192621B1 (de) | Laborkugelmühle | |
| DE19634629B4 (de) | Getriebelose Antriebsvorrichtung für Aufzüge | |
| EP4265556B1 (de) | Antriebsmaschine für einen aufzug | |
| EP0834463A1 (de) | Kompakt-Antrieb für Aufzüge | |
| EP2147884B1 (de) | Hebevorrichtung, insbesondere Aufzug oder Hebebühne | |
| EP2061136A1 (de) | Elektrischer Direktantrieb für eine Walze | |
| DE60204256T2 (de) | Durch Drehmoment lösbare Scheibenbremse | |
| EP3536404B1 (de) | Stützvorrichtung für getriebepaar und industrieapplikation | |
| EP0673874A1 (de) | Antriebsmaschine für Aufzüge | |
| DE102016120645A1 (de) | Hebevorrichtung, insbesondere Aufzug oder Hebebühne | |
| EP1069068A1 (de) | Kompakter Antrieb für einen Aufzug | |
| DE102010031107B4 (de) | Umformpresse mit einem Stößeldirektantrieb | |
| DE10005075A1 (de) | Elektrisch angetriebene Winde, insbesondere Theaterwinde | |
| EP1048603A1 (de) | Schräganordnung eines Seilaufzugsantriebes | |
| DE10136030B4 (de) | Trommelantrieb für eine Fahrtreppe oder einen Fahrsteig | |
| EP3665765A1 (de) | Generator für eine windenergieanlage und windenergieanlage mit selbigem | |
| EP3452399A1 (de) | Hebevorrichtung, insbesondere aufzug oder hebebühne | |
| EP2004895B1 (de) | Verfahren und antriebsanordnung zum betreiben einer webmaschine |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN PUBLISHED |
|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC ME MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20231207 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC ME MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| INTG | Intention to grant announced |
Effective date: 20241204 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC ME MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502023000550 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Free format text: CASE NUMBER: APP_11705/2025 Effective date: 20250311 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20250212 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250512 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250212 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250212 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20250513 Year of fee payment: 3 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250212 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG9D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250612 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250512 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250212 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250212 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250612 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250212 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250513 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250212 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: AT Payment date: 20250721 Year of fee payment: 3 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250212 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250212 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250212 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250212 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250212 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250212 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250212 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250212 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 502023000550 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20250414 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250212 |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20250430 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20250430 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20250430 |
|
| 26N | No opposition filed |
Effective date: 20251113 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20250414 |