EP4363306B1 - Dispositif de mise à la verticale pour véhicule sous-marin - Google Patents
Dispositif de mise à la verticale pour véhicule sous-marin Download PDFInfo
- Publication number
- EP4363306B1 EP4363306B1 EP22744291.0A EP22744291A EP4363306B1 EP 4363306 B1 EP4363306 B1 EP 4363306B1 EP 22744291 A EP22744291 A EP 22744291A EP 4363306 B1 EP4363306 B1 EP 4363306B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- vehicle
- arm
- autonomous underwater
- hull
- arms
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63G—OFFENSIVE OR DEFENSIVE ARRANGEMENTS ON VESSELS; MINE-LAYING; MINE-SWEEPING; SUBMARINES; AIRCRAFT CARRIERS
- B63G8/00—Underwater vessels, e.g. submarines; Equipment specially adapted therefor
- B63G8/14—Control of attitude or depth
- B63G8/26—Trimming equipment
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63G—OFFENSIVE OR DEFENSIVE ARRANGEMENTS ON VESSELS; MINE-LAYING; MINE-SWEEPING; SUBMARINES; AIRCRAFT CARRIERS
- B63G8/00—Underwater vessels, e.g. submarines; Equipment specially adapted therefor
- B63G8/001—Underwater vessels adapted for special purposes, e.g. unmanned underwater vessels; Equipment specially adapted therefor, e.g. docking stations
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63G—OFFENSIVE OR DEFENSIVE ARRANGEMENTS ON VESSELS; MINE-LAYING; MINE-SWEEPING; SUBMARINES; AIRCRAFT CARRIERS
- B63G8/00—Underwater vessels, e.g. submarines; Equipment specially adapted therefor
- B63G8/14—Control of attitude or depth
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63G—OFFENSIVE OR DEFENSIVE ARRANGEMENTS ON VESSELS; MINE-LAYING; MINE-SWEEPING; SUBMARINES; AIRCRAFT CARRIERS
- B63G8/00—Underwater vessels, e.g. submarines; Equipment specially adapted therefor
- B63G8/14—Control of attitude or depth
- B63G8/22—Adjustment of buoyancy by water ballasting; Emptying equipment for ballast tanks
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B2211/00—Applications
- B63B2211/02—Oceanography
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63G—OFFENSIVE OR DEFENSIVE ARRANGEMENTS ON VESSELS; MINE-LAYING; MINE-SWEEPING; SUBMARINES; AIRCRAFT CARRIERS
- B63G8/00—Underwater vessels, e.g. submarines; Equipment specially adapted therefor
- B63G8/001—Underwater vessels adapted for special purposes, e.g. unmanned underwater vessels; Equipment specially adapted therefor, e.g. docking stations
- B63G2008/002—Underwater vessels adapted for special purposes, e.g. unmanned underwater vessels; Equipment specially adapted therefor, e.g. docking stations unmanned
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63G—OFFENSIVE OR DEFENSIVE ARRANGEMENTS ON VESSELS; MINE-LAYING; MINE-SWEEPING; SUBMARINES; AIRCRAFT CARRIERS
- B63G8/00—Underwater vessels, e.g. submarines; Equipment specially adapted therefor
- B63G8/001—Underwater vessels adapted for special purposes, e.g. unmanned underwater vessels; Equipment specially adapted therefor, e.g. docking stations
- B63G2008/002—Underwater vessels adapted for special purposes, e.g. unmanned underwater vessels; Equipment specially adapted therefor, e.g. docking stations unmanned
- B63G2008/004—Underwater vessels adapted for special purposes, e.g. unmanned underwater vessels; Equipment specially adapted therefor, e.g. docking stations unmanned autonomously operating
Definitions
- the present invention relates to underwater vehicles, in particular autonomous underwater vehicles, better known by the acronym AUV meaning Autonomous Underwater Vehicle.
- the invention relates to a system making it possible to vary a trim angle of such an AUV, in particular to put it in a vertical or close to vertical position.
- AUVs are typically designed to navigate in a nominal horizontal position in the water. In this nominal position, the AUV has a zero or near-zero trim angle and is in a so-called equilibrium position in the water. Its trim angle is defined by the angle between its longitudinal axis and a horizontal plane. Navigating in a nominal horizontal position reduces drag forces and minimizes energy consumption while navigating.
- a change in attitude angle to approach the vertical of the AUV may be required to carry out certain operations, including monitoring sites using cameras fitted to the AUV, or resetting the navigation system using the AUV's antennas placed out of the water, or simply for the recovery of the AUV.
- One such device is a propulsion system, comprising one or more thrusters, mounted on the AUV and which is operated to change the pitch angle of the AUV.
- adjustment boxes housed at the front and rear of the AUV.
- Each adjustment box defines a volume and is at least partially filled with fluids.
- the quantities of fluids vary in the different boxes to vary the trim angle of the AUV.
- Thrusters and trim boxes can also be simultaneously integrated into an AUV to increase trim capabilities.
- JP 2006 232070 A describes an example of an AUV whose attitude angle can be changed.
- the invention aims to provide an autonomous underwater vehicle comprising a verticalization device which is particularly simple and convenient, both in its manufacture and in its use.
- the articulated arm allows the float to be moved away from the hull of the vehicle and, due to the buoyancy of the float, this allows the position of the center of volume of the vehicle, also called the center of buoyancy or thrust, to be modified in order to facilitate the verticalization of the vehicle. Deploying the arm requires very little energy, which is advantageous for autonomous vehicles. In addition to being convenient, the addition of such an arm equipped with a float is a compact solution since it changes the architecture of the autonomous underwater vehicle very little.
- the autonomous underwater vehicle may comprise at least two arms, attached to the hull on the port and starboard sides, arranged so as to form an angle between them within the range [60°; 180°[.
- the autonomous underwater vehicle may include at least one actuating member enabling the arm to move from the folded position to the deployed position.
- the actuating member may further allow the arm to move from the extended position to the folded position.
- the actuating member is capable of orienting the arm in a determined or selected angular position relative to the longitudinal main axis.
- the actuating member can be configured to adapt, depending on the attitude angle of the vehicle, the angular position of the arm in the deployed position, relative to the main longitudinal axis.
- the autonomous underwater vehicle may include a verticality sensor, such as an accelerometer, such that the angular position of the arm is monitored and controlled based on the output signal of the verticality sensor. This helps ensure stability of the AUV in its vertical or almost vertical position, even in the event of disturbances linked to the environment, and in particular the effects of waves or the density of the water.
- a verticality sensor such as an accelerometer
- the float may have a variable volume. This may influence the position of the center of thrust and therefore may also improve the stability of the AUV in its vertical or near-vertical position.
- At least one of the arms can be telescopic. This allows a distance between the distal end and the proximal end of the arm to be adjusted, so as to move the floats closer to or further away from the hull of the vehicle. It is possible to facilitate the verticalization of the vehicle. This distance can also be monitored and controlled using a verticality sensor.
- the autonomous underwater vehicle may additionally comprise one or more adjustment boxes capable of varying the trim angle of the vehicle.
- the autonomous underwater vehicle may additionally comprise one or more thrusters capable of varying the trim angle of the vehicle.
- the combination of the arm and the adjustment boxes and/or the thrusters makes it possible to further facilitate the verticalization of the autonomous underwater vehicle.
- the adjustment boxes and/or the thrusters make it possible to initiate the verticalization of the autonomous underwater vehicle, and when the trim angle reaches a threshold value, the arm can be deployed so as to finalize the verticalization and ensure the stability of the vehicle, once the vehicle is verticalized.
- the adjustment boxes can be arranged, when the vehicle is in nominal position, in an upper part of the hull and the arms are attached to a lower part of the hull of the vehicle.
- the invention relates, according to a second aspect, to a method for verticalizing a vehicle as mentioned above, comprising the actuation of the arm for put it in the deployed position, from the folded position, in particular when the vehicle's trim angle reaches a first threshold angle.
- the method may comprise first initiating the verticalization of the vehicle by means of adjustment boxes and/or thrusters.
- the method may include actuating the arm to place it in the stowed position from the deployed position when the trim angle of the vehicle is less than a second threshold angle.
- the invention finds an application in the field of autonomous underwater vehicles, intended to be used once or several times, following their recovery in the open sea.
- the invention applies in particular to vehicles known under the term AUV, as described above.
- autonomous underwater vehicles are used to perform various operations at sea, such as surveillance operations.
- autonomous underwater vehicles are launched from a boat (such as USVs, Unmanned Surface Vessels ) or a submarine, or even an aircraft, and navigate completely submerged in the water in a nominal position close to horizontal.
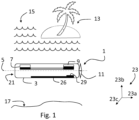
- the autonomous underwater vehicle 1 comprises a hull 3, of cylindrical shape or not. In certain embodiments, the underwater vehicle may be of any other shape.
- This hull extends along a main longitudinal axis 5.
- the main longitudinal axis 5 passes through the nose 21 of the autonomous underwater vehicle 1 and a propulsion system 11, such as propeller thrusters for example.
- Vehicle 1 is shown in the Figure 1 in nominal navigation position, in which the main longitudinal axis 5 is substantially parallel to the horizontal axis.
- horizontal plane is meant a plane having an orientation parallel to the horizon.
- the hull 3 In the nominal navigation position, the hull 3 comprises an upper part 3a facing the sea surface 15, and a lower part 3b facing the seabed 17.
- the vehicle In order to limit as much as possible the effect of drag forces, in general, during nominal navigation of the vehicle (apart from operations requiring maneuvers such as changing orientation), the vehicle is configured to navigate in the nominal position illustrated in Figure 1 , that is to say in which the main longitudinal axis 5 forms a zero or almost zero angle with the horizontal plane.
- the angle formed is an angle between 0° and 10°.
- This angle subsequently called the trim angle, is the longitudinal inclination of the vehicle 1, that is to say the trim angle that the main longitudinal axis 5 forms with the horizontal plane 19 (parallel to the direction 23a of the reference frame 23).
- the underwater vehicle To enable the autonomous underwater vehicle to be maneuvered underwater, the underwater vehicle must neither rise nor fall in its nominal position, meaning that the vehicle must have a zero or near-zero trim angle in the equilibrium position.
- the nominal position of vehicle 1 is an equilibrium position of vehicle 1 when it is submerged, and depends in particular on the relative position of the center of gravity and the center of thrust, also called the center of buoyancy or volume.
- the nominal position of the vehicle, for a vehicle with zero buoyancy is characterized by the fact that the center of gravity and the center of thrust are aligned along the vertical (direction 23b orthogonal to the horizontal plane 19).
- the center of gravity of vehicle 1 depends on its architecture, that is, the mass distribution of its body and the elements it contains inside the hull.
- the center of thrust of the vehicle the place on the vehicle where the hydrostatic forces, "Archimedes' thrust", are applied, varies according to the distribution of volumes in the vehicle.
- the equilibrium position may vary when vehicle 1 is maneuvered, especially when the speed of vehicle 1 is changed, due to the influence of hydrodynamic forces.
- the vehicle 1 therefore includes elements making it possible in particular to manage the relative position of the center of gravity and the center of thrust in order to modify the equilibrium position of the vehicle 1 for carrying out the various maneuvers. In other words, this amounts to modifying the attitude angle of the vehicle 1.
- the underwater vehicle 1 here comprises a thruster 11 arranged at one end of the hull 3 of the vehicle and which is capable of modifying the speed of movement of the vehicle underwater and also of maneuvering the vehicle. Maneuvering the underwater vehicle means allowing its movement in the three directions identified 23a, 23b, 23c by the reference frame 23 represented on the Figure 1 .
- the thrust applied to the vehicle 1 by the thruster 11 then drives the vehicle 1 with the part 21, called the nose, ahead of the rest of the vehicle 1.
- the nose 21 and the thruster 11 are aligned along the main longitudinal axis 5 of the vehicle 1.
- the vehicle 1 comprises adjustment boxes 7, 9 respectively arranged at the front and rear of the vehicle 1. These are boxes 7, 9 defining a volume, partially filled with a liquid, such as water or oil.
- the volume of liquid contained in the adjustment boxes 7, 9 can be modified, so as to vary the center of thrust of the vehicle 1, thus making it possible to vary the trim angle of the vehicle 1.
- the adjustment boxes 7, 9 are connected to each other by a pipe, thus forming a closed circuit.
- control boxes can admit liquid (e.g. sea water) from the outside or discharge liquid to the outside.
- liquid e.g. sea water
- the admission of sea water, to weigh down the control boxes, can be done by means of a tap coupled with a flow limiter (particularly in the event of overpressure outside the vehicle).
- the evacuation of water from the control boxes can be done by means of a pump advantageously coupled with a non-return valve. This variation of the overall volume of liquid in the boxes adjustments allow you to vary the weight of the vehicle in the water. This allows you to move the vehicle closer to or further from the surface.
- the variation of the volume contained in the adjustment boxes 7, 9 makes it possible to modify the position of the center of thrust by modifying the distribution of weight inside the hull 3 of the vehicle.
- These boxes are generally arranged at the front and rear of the vehicle 1.
- the vehicle 1 can include several other adjustment boxes 7, 9, arranged differently (to starboard and to port for example).
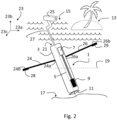
- the thrusters and the adjustment boxes can be used (whatever their positions) to initiate the verticalization of the vehicle 1, as illustrated in Figure 2 .
- FIG. 2 illustrates an example of a surveillance operation of an area of interest 13, requiring the “permanent” vertical positioning of the vehicle 1.
- such a permanent vertical position of the AUV may prove to be interesting, in particular to place the antennas of the AUV out of the water, for example during the phases of recalibration of the navigation system, or communication phases (radio or satellite).
- the initiation of the verticalization of vehicle 1 aims to move vehicle 1 from the nominal position (illustrated in Figure 1 ) to a position close to vertical (illustrated in Figure 2 ): this is done by varying the angle vehicle trim angle, so that the vehicle, balanced in the water, goes from a trim angle of approximately zero to a trim angle of more than 60°.
- the surveillance operation aims to monitor the area of interest 13 by means of a camera 25.
- the camera 25 is arranged on an arm attached to the hull 3 of the vehicle 1.
- the on-board camera 25 is raised above the surface of the water 15 in the direction of the area of interest 13 (by means of an arm 27), and then makes it possible to obtain images of the area of interest 13 whose clarity is satisfactory for the surveillance activities.
- the initiation of the vertical positioning can be done with the adjustment boxes alone, in particular by making the rear of the vehicle 1 heavier than the front of the vehicle.
- the rear adjustment box 9 is entirely filled with liquid
- the front adjustment box 7 is entirely filled with air.
- the initiation of the vertical setting can be carried out by means of the propulsion system, having one of the configurations as presented previously
- the initiation of the vertical positioning makes it possible to obtain a trim angle of the vehicle 1 which is of the order of 70°, so that the main longitudinal axis of the vehicle is not parallel to the vertical direction 23b.
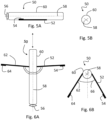
- the autonomous underwater vehicle 30 comprises a verticalization device comprising a single arm 32.
- the arm 32 comprises two ends, a distal end and a proximal end.
- the proximal end is the end of the arm 32 which is rotatably mounted on the hull 40 of the vehicle 30 and the distal end comprises a float 34, that is to say an element whose volume density is lower than that of water.
- the float 34 is integral with the arm 32.
- the arm is able to be arranged in a folded position in which the float 34 is here retracted inside the hull 40 of the vehicle 30. In this folded position, the arm is arranged substantially parallel to the main longitudinal axis 38 of the vehicle 30, so as not to protrude relative to the hull 40 of the vehicle 38, and therefore not to impact the movement of the vehicle 30 (by creating drag forces).
- the arm 32 is rotatably mounted on the shell 40 so as to be at least rotatably movable and to form an angle relative to the longitudinal main axis 38 in the deployed position, as illustrated in Figures 4A and 4B .
- the axis of rotation is an axis orthogonal to the main longitudinal axis 5, and oriented according to the direction 23c of the reference frame 23 reproduced on the Figures 4A and 4B . Rotating the arm 32 from the folded position to the deployed position allows the float 34 to be placed away from the hull 40 of the vehicle 30.
- the buoyancy of the float acts on the position of the center of thrust of the vehicle.
- the float 34 when the arm 32 is in the deployed position, the float 34 is placed at a distance from the hull 40 of the vehicle 30, so that this influences the position of the center of thrust of the vehicle 30.
- the float 34 makes it possible to move a volume of water away from the hull 40 of the vehicle 30, so that the position of the hydrostatic forces applied to the vehicle 30 is modified. causing the modification of the position of the center of thrust.
- the deployment of the arms then makes it possible to act mainly on the position of the center of thrust, by moving it towards the nose 42 of the vehicle 1.
- the vehicle when the arm 32 is deployed, the vehicle can continue its movement towards the vertical and the stability of the vehicle in the vertical position can be improved.
- the characteristics of the arms and floats are chosen so as to allow, when the arm is deployed, to move the center of thrust towards the nose 42.
- the arm 32 is advantageously arranged at the level of the lower hull of the vehicle 30.
- the arm in this example is referred to as a passive arm, because its positioning relative to the main longitudinal axis 38 depends on the characteristics of the float (for example its buoyancy) but also on the length of the arm.
- the arm 32 and the float 34 are configured so that, in the deployed position, the arm 32 is substantially perpendicular to the longitudinal main axis 38 of the autonomous underwater vehicle 30. In certain embodiments, the arm 32, in the deployed position, forms an angle with the longitudinal main axis 38 of the vehicle 1 comprised in the range [80;100].
- the deployment of the arm can be triggered by an actuator or by the initiation of the verticalization movement, as illustrated in the Figures 4A and 3A (arrow 41).
- the arm can be deployed by means of an actuating member allowing the arm to move from a folded position to a deployed position only.
- the arm once deployed, cannot be folded into the folded position, in which the float is retracted into the hull.
- expendable autonomous underwater vehicles which can be used only once at sea.
- the actuating member comprises a spring arranged between the arm 32 and the shell 40 of the vehicle 30 and a switch (of the valve type for example, all or nothing) configured to activate the spring, so that the latter exerts a force on the arm 32 to move it from a folded position, substantially perpendicular to the main axis 38, to a deployed position.
- a switch of the valve type for example, all or nothing
- activate it is meant that the switch is configured to allow the spring to apply a force on the arm 32, so that it comes to take a deployed position.
- the adjustment boxes and/or the propulsion system 36 are controlled to initiate verticalization, and the passive arm 32 is then deployed to have a synergistic action with the adjustment boxes and/or the propulsion 36.
- the arm 32 is then deployed “at the right time” when the initiation of verticalization allows the vehicle to have a trim angle of the order of 70°, making it possible to improve the verticality and the holding of the AUV in a vertical position.
- the deployment of the arms can be done simultaneously or one after the other in a sequence, such as for example starboard then port.
- the vehicle 50 comprises two arms 52, 62 respectively comprising two floats 54, 64 at their distal end.
- the arms are preferably attached to the lower hull, respectively to port and starboard.
- the arms are arranged so as to form an angle 66 included in the range [60°; 180°[.
- the arms 52, 62 are actuable by means of an actuating member allowing one of the arms to move from a folded position to a deployed position and vice versa.
- the actuating member for deploying the arms 52, 62 and vice versa notably comprises a motor, capable of orienting the arms 52, 62 in several angular positions relative to the main longitudinal axis.
- the motorized arms 52, 62 are orientable at least around their axes of rotation (as indicated previously, orthogonal to the main longitudinal axis 58 of the vehicle 50) so as to allow the deployment of the arms 52, 62 in selected deployed positions, for example according to the angle between the main longitudinal axis 58 of the vehicle 50 and the arm 52, 62.
- the actuating member i.e. the motor
- the vehicle 50 may include a verticality sensor, such as one or more accelerometers, so that the angular position of the arm is monitored and controlled according to the output signal of the verticality sensor.
- the float is configured to have a variable volume.
- environmental conditions such as a sudden onset of an unusual swell
- the arm is telescopic, so that the length of the arms can be adjustable.
- the effect of the arms on the center of thrust can be modified by varying the length of the arms.
- the vehicle 50 comprises two active arms 52, 62, it may in one embodiment comprise a single active arm, or more than two active arms.
- the verticalization device comprises, in addition to the active arms, other elements, such as the control boxes and/or the propulsion system 56.
- the arms 52, 62 are deployed after the verticalization is initiated by the control boxes and/or the propulsion system 56.
- the verticalization device is then configured to control the arms 52, 62 and/or the adjustment boxes and/or the propulsion system 56.
- the verticalization device comprises a control unit capable of controlling different elements, in order to ensure the synchronization of their impacts on the center of thrust of the vehicle 80.
- the vehicle 80 illustrated in these figures is generally cylindrical, is approximately 6.5 m long and has a diameter of approximately 0.5 m. This vehicle 80 has a mass of approximately 1200 kg and when submerged, this vehicle 80 displaces approximately 1100 liters of water.
- the control boxes 82, 84 of the vehicle 80 have a maximum volume of 55 liters respectively. These control boxes 82, 84 are respectively arranged 2m behind and in front of the center of gravity (CDG) and the center of thrust (CDC for center of hull in the figures) which are aligned vertically.
- CDG center of gravity
- CDC center of thrust
- the rear control box 82 is thus arranged between the center of gravity (or thrust) and the propulsion system 88
- the front control box 84 is arranged between the center of gravity (or thrust) and the nose 83 of the vehicle 80.
- the autonomous underwater vehicle 80 comprises adjustment boxes 82, 84 which are arranged, when the vehicle 80 is in nominal position, in an upper part 96 of the hull 86 and the arms are attached to a lower portion 94 of the hull 86 of the vehicle 80.
- the adjustment boxes 82, 84 and the arms 90 are arranged on either side of the longitudinal main axis 99.
- the adjustment boxes are arranged inside the hull of the vehicle 80, in particular in a so-called upper part 96, which, when the vehicle 80 is sailing in the nominal position, is directed towards the surface 85.
- the arms are attached to the lower part 94 of the hull 86, which when the vehicle 80 is sailing in the nominal position, is directed towards the seabed 87.
- the adjustment boxes allow the trim angle of the vehicle 80 to be varied. In this embodiment, only the adjustment boxes allow the trim angle of the vehicle to be varied.
- the figures 7, 8 And 9 illustrate three configurations of the adjustment boxes 82, 84, in which the vehicle 80 respectively has a zero trim angle, a positive trim angle and a negative trim angle, when immersed in sea water (with an estimated mass volume of 1030 kg/m 3 ).
- the adjustment boxes are filled 60% with air at the front and 20% with air at the rear.
- the longitudinal inclination of the vehicle 80 relative to the horizontal plane 98 drives the nose 83 of the vehicle towards the surface of the water 85.
- the filling of the adjustment boxes is modified so that the rear adjustment box 82 has a filling rate greater than the filling rate of the front adjustment box 84.
- the longitudinal inclination of the vehicle 80 relative to the horizontal plane 98 drives the nose 83 of the vehicle towards the bottom 87.
- the filling of the adjustment boxes is modified so that the body of front adjustment 84 has a higher filling rate than the filling rate of the rear adjustment box 82.
- Two arms 92 are rotatably mounted on the hull 86 of the vehicle 80. At the free end of the arm 92, a float 90 is mounted.
- the float has a volume of approximately 10 liters (or 20 liters for the two arms).
- the arms 92 configured to be deployed have a length of approximately 2 m.
- the axis of rotation of the arms is here orthogonal to the main longitudinal axis 99.
- the adjustment boxes 82, 84 are used in conjunction with the arms 92.
- the adjustment boxes are filled with air to 80% at the front and to 0% at the rear 82.
- the rear adjustment box 82 must be completely filled with liquid.
- the adjustment boxes allow a vehicle attitude angle of maximum 75° to be generated.
- the action of the arms, by their deployment, allows regulation of the verticality of the vehicle 80, in a range of +/-12° attitude angle around the vertical (i.e. around a attitude angle of 90°).
- the arms 92a, 92b can be positioned in several isolated positions (some of which are shown in dotted lines on the Figure 10 ).
- the position of the arms is controlled to take one or more isolated positions, when the vehicle initiates a vertical positioning or when the vehicle is in a vertical position, so as to form an angle greater than 0° and less than 180° with the main longitudinal axis of the vehicle 80.
- the deployment of one or both arms in one of the deployed positions as illustrated in the Figure 10 is done according to a method comprising in particular a step in which, when the vehicle's trim angle reaches a first threshold angle, the arm(s) is/are actuated to put them in the deployed position, from the folded position.
- the deployment of the arms of the vehicle 80 can be carried out following a modification of the trim angle of the vehicle, for example by the use of the adjustment boxes 82, 84 and/or the propulsion system, so that this trim angle becomes greater than equal to the first threshold angle.
- the verticalization of the vehicle 80 is initiated prior to the deployment of the arms, and carried out for example by means of the adjustment boxes 82, 84 and/or the propulsion system.
- initializing the vertical setting via the adjustment boxes allows the vehicle 80 to reach a trim angle of approximately 75°.
- the first threshold angle of 70° may be specified, such that the arms are deployed when the vehicle trim angle 80 exceeds 70° via the adjustment boxes.
- the method may also comprise a step of folding the arm(s) of the vehicle 80, when the attitude angle of the vehicle 80 becomes less than a second threshold angle.
- the arms are configured to be actuated and folded, when the trim angle becomes lower than the second threshold value.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Aviation & Aerospace Engineering (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Description
- La présente invention concerne les véhicules sous-marins, en particulier les véhicules autonomes sous-marins, mieux connus sous l'acronyme AUV signifiant en anglais Autonomous Underwater Vehicle.
- En particulier, l'invention vise un système permettant de faire varier un angle d'assiette d'un tel AUV, en particulier pour le mettre dans une position verticale ou proche de la verticale.
- Les AUVs sont généralement conçus pour naviguer dans une position nominale dite horizontale dans l'eau. Dans cette position nominale, l'AUV présente un angle d'assiette nul ou quasiment nul, et se trouve dans une position dite d'équilibre dans l'eau. Son angle d'assiette est défini par l'angle entre son axe longitudinal et un plan horizontal. La navigation en position nominale horizontale réduit les efforts de trainées et minimise la consommation d'énergie en navigation.
- Un changement d'angle d'assiette pour se rapprocher de la verticale de l'AUV peut être requis pour réaliser certaines opérations, dont notamment la surveillance de sites à l'aide de caméras équipant l'AUV, ou le recalage du système de navigation grâce à des antennes de l'AUV mises hors de l'eau, ou encore tout simplement pour la récupération de l'AUV.
- On connaît différents dispositifs de modification de l'angle d'assiette d'un AUV.
- Un de ces dispositifs est formé d'un système de propulsion, comprenant un ou plusieurs propulseurs, monté sur l'AUV et qui est actionné pour changer l'angle d'assiette de l'AUV.
- Cela est notamment possible lorsque le système propulsif présente l'une des configurations suivantes :
- Un ou des propulseurs verticaux (par exemple un à l'avant et un à l'arrière du véhicule). Ainsi, les poussées opposées des propulseurs induisent une modification de l'angle d'assiette du véhicule ;
- Des propulseurs horizontaux situés loin de l'axe longitudinal principal du véhicule. Ainsi, les poussées de propulseurs opposées induisent un couple sur le véhicule, ce qui modifie l'angle d'assiette au véhicule ;
- Un ou des propulseurs orientables, de sorte qu'en modifiant l'orientation des propulseurs et donc de la poussée, l'angle d'assiette du véhicule peut être modifié.
- Un autre de ces dispositifs est formé de caisses dites de réglages logées à l'avant et à l'arrière de l'AUV. Chaque caisse de réglage définit un volume et est au moins partiellement remplie de fluides. Les quantités de fluides varient dans les différentes caisses pour faire faire varier l'angle d'assiette de l'AUV.
- Les propulseurs et les caisses de réglage peuvent également être simultanément intégrés dans un AUV pour augmenter les capacités de prise d'assiette.
JP 2006 232070 A - L'invention vise à fournir un véhicule autonome sous-marin comportant un dispositif de mise à la verticale qui soit particulièrement simple et commode, tant dans sa fabrication que dans son utilisation.
- L'invention a ainsi pour objet, sous un premier aspect, un véhicule autonome sous-marin comprenant une coque s'étendant selon un axe principal longitudinal, au moins un dispositif de mise à la verticale du véhicule configuré pour modifier un angle assiette du véhicule entre une position nominale horizontale du véhicule et une position verticale du véhicule,
le dispositif de mise à la verticale du véhicule comprend un ou plusieurs bras montés par une extrémité proximale sur la coque et articulés en rotation par rapport à la coque, caractérisé en ce que le bras comprend un flotteur à une extrémité libre distale de sorte que le bras est configuré pour prendre: - une position repliée lorsque le véhicule est en position nominale avec un angle d'assiette sensiblement nul, dans laquelle le bras est sensiblement parallèle à l'axe principal longitudinal du véhicule et le flotteur est à proximité immédiate de la coque ;
- une position déployée dans laquelle le bras est incliné par rapport à l'axe principal longitudinal de sorte à amener et/ou stabiliser le véhicule en position dite verticale avec un angle d'assiette supérieur à 70° par rapport à sa position nominale.
- Dans le véhicule sous-marin autonome selon l'invention, le bras articulé permet d'écarter le flotteur de la coque du véhicule et, du fait de la flottabilité du flotteur, cela permet de modifier la position du centre de volume du véhicule, aussi appelé centre de carène ou de poussée, dans le but de faciliter la mise à la verticale du véhicule. Le déploiement du bras ne requiert qu'une très faible énergie, ce qui est avantageux pour les véhicules autonomes. En plus d'être commode, l'ajout d'un tel bras muni d'un flotteur est une solution compacte puisqu'elle ne change que très peu l'architecture du véhicule autonome sous-marin.
- Selon un mode de réalisation, le véhicule autonome sous-marin peut comprendre au moins deux bras, fixés à la coque à bâbord et à tribord, agencés de sorte à former un angle entre eux compris dans la plage [60° ;180°[.
- Le véhicule autonome sous-marin peut comprendre au moins un organe d'actionnement permettant au bras de passer de la position repliée à la position déployée.
- L'organe d'actionnement peut en outre permettre au bras de passer de la position déployée à la position repliée.
- En variante, seul un déploiement irréversible du bras est possible.
- Selon un mode de réalisation, l'organe d'actionnement est apte à orienter le bras dans une position angulaire déterminée ou sélectionnée par rapport à l'axe principal longitudinal.
- Selon un mode de réalisation, l'organe d'actionnement peut être configuré pour adapter, selon l'angle d'assiette du véhicule, la position angulaire du bras en position déployée, par rapport à l'axe principal longitudinal.
- Selon un mode de réalisation, le véhicule autonome sous-marin peut comprendre un capteur de verticalité, tel qu'un accéléromètre, de sorte que la position angulaire du bras est contrôlée et commandée en fonction du signal de sortie du capteur de verticalité. Ceci permet d'assurer une stabilité de l'AUV dans sa position verticale ou presque verticale, même en cas de perturbations liées à l'environnement, et notamment les effets de houle ou la densité de l'eau.
- Selon un mode de réalisation, le flotteur peut avoir un volume variable. Cela peut influer sur la position du centre de poussée et donc peut aussi permettre d'améliorer la stabilité de l'AUV dans sa position verticale ou presque verticale.
- Selon un mode de réalisation, au moins l'un des bras peut être télescopique. Cela permet de régler une distance entre l'extrémité distale et l'extrémité proximale du bras, de sorte à rapprocher ou éloigner les flotteurs de la coque du véhicule. Il est possible de faciliter la mise à la verticale du véhicule. Cette distance peut être contrôlée et commandée aussi grâce à un capteur de verticalité.
- Selon un mode de réalisation, le véhicule autonome sous-marin peut comprendre en complément une ou plusieurs caisses de réglage aptes à faire varier l'angle d'assiette du véhicule.
- Selon un mode de réalisation, le véhicule autonome sous-marin peut comprendre en complément un ou plusieurs propulseurs aptes à faire varier l'angle d'assiette du véhicule.
- La combinaison du bras et des caisses de réglage et/ou des propulseurs permet de faciliter encore la mise à la verticale du véhicule autonome sous-marin. En particulier, les caisses de réglage et/ou les propulseurs permettent d'amorcer la mise à la verticale du véhicule autonome sous-marin, et lorsque l'angle d'assiette atteint une valeur seuil, le bras peut être déployé de sorte à finaliser la mise à la verticale et assurer la stabilité du véhicule, une fois la véhicule mis à la verticale.
- Selon un mode de réalisation, les caisses de réglages peuvent être disposés, lorsque le véhicule est en position nominale, dans une partie supérieure de la coque et les bras sont rattachés à une partie inférieure de la coque du véhicule.
- L'invention vise, selon un second aspect, un procédé de mise à la verticale d'un véhicule tel que précité, comprenant l'actionnement du bras pour le mettre en position déployée, à partir de la position repliée, notamment lorsque l'angle d'assiette du véhicule atteint un premier angle seuil.
- Selon un mode de réalisation, le procédé peut comprendre au préalable l'initiation de la mise à la verticale du véhicule par le biais de caisses de réglage et/ou des propulseurs.
- Selon un mode de réalisation, le procédé peut comprendre l'actionnement du bras pour le mettre en position repliée à partir de la position déployée lorsque l'angle d'assiette du véhicule est inférieur à un deuxième angle seuil.
- D'autres particularités et avantages de l'invention apparaîtront encore dans la description ci-après.
- L'invention, selon plusieurs exemples de réalisation, sera bien comprise et ses avantages apparaitront mieux à la lecture de la description détaillée qui suit, donnée à titre indicatif et nullement limitatif, en référence aux dessins annexés dans lesquels :
- La
figure 1 illustre un véhicule autonome sous-marin selon l'invention. - La
figure 2 illustre un véhicule autonome sous-marin selon l'invention dont la mise à la verticale est initiée. - Les
figures 3A et 3B illustrent un premier mode de réalisation de l'invention, montrant un AUV ayant un bras en position repliée. - Les
figures 4A et 4B illustrent le premier mode de réalisation de l'invention, dans lequel le bras est en position déployée. - Les
figures 5A et 5B illustrent un deuxième mode de réalisation de l'invention, montrant un AUV ayant deux bras en position repliée. - Les
figures 6A et 6B illustrent le deuxième mode de réalisation de l'invention, dans lequel les bras du véhicule sont en position déployée. - Les
figures 7, 8 et9 illustrent un troisième mode de réalisation montrant un AUV ayant des caisses de réglage en plus de bras. - La
figure 10 illustre des exemples de différentes positions des bras du troisième mode de réalisation. - Les éléments identiques représentés sur les figures précitées sont identifiés par des références numériques identiques.
- L'invention trouve une application dans le domaine des véhicules autonomes sous-marins, destinés à être utilisés une seule fois ou plusieurs fois, suite à leur récupération en pleine mer.
- L'invention s'applique notamment à des véhicules connus sous le terme AUV, comme décrit précédemment.
- En général, les véhicules autonomes sous-marins sont utilisés pour effectuer différentes opérations en mer, tel que par exemple des opérations de surveillance.
- Pour cela, les véhicules autonomes sous-marins sont lancés à partir d'un bateau (tels que par exemple les bateaux de type USV, en anglais Unmanned Surface Vessel) ou d'un sous-marin, ou encore d'un aéronef, et naviguent totalement immergés dans l'eau dans une position nominale proche de l'horizontale.
- Un exemple de véhicule autonome sous-marin 1 naviguant en mer 15 est ainsi illustré à la
figure 1 . Dans la suite de la description, les termes véhicule et véhicule autonome sous-marin sont utilisés indifféremment pour désigner un véhicule autonome sous-marin. Le véhicule autonome sous-marin 1 comprend une coque 3, de forme cylindrique ou non. Dans certains modes de réalisation, le véhicule sous-marin peut être de toute autre forme. Cette coque s'étend le long d'un axe principal longitudinal 5. Dans l'exemple illustré, l'axe principal longitudinal 5 passe par le nez 21 du véhicule autonome sous-marin 1 et un système propulsif 11, tel que des propulseurs à hélice par exemple. - Le véhicule 1 est illustré sur la
figure 1 en position nominale de navigation, dans laquelle l'axe principal longitudinal 5 est sensiblement parallèle à l'axe horizontal. Dans la suite de la description, par plan horizontal, on entend un plan ayant une orientation parallèle à l'horizon. - Dans la position nominale de navigation, la coque 3 comprend une partie supérieure 3a faisant face à la surface de la mer 15, et une partie inférieure 3b faisant face au fond marin 17.
- Afin de limiter au maximum l'effet des efforts de trainées, de manière générale, lors de la navigation nominale du véhicule (en dehors des opérations nécessitant des manœuvres de type changement d'orientation), le véhicule est configuré pour naviguer dans la position nominale illustrée à la
figure 1 , c'est-à-dire dans laquelle l'axe longitudinal principal 5 forme un angle nul ou quasi nul avec le plan horizontal. Par exemple, l'angle formé est un angle compris entre 0° et 10°. Cet angle, appelé par la suite angle d'assiette, est l'inclinaison longitudinale du véhicule 1, c'est-à-dire l'angle d'assiette que forme l'axe principal longitudinal 5 avec le plan horizontal 19 (parallèle à la direction 23a du référentiel 23). - Pour permettre au véhicule autonome sous-marin d'être manœuvré sous l'eau, le véhicule sous-marin ne doit ni monter, ni descendre dans sa position nominale, ce qui signifie que le véhicule doit avoir un angle d'assiette nul ou quasiment nul en position d'équilibre.
- La position nominale du véhicule 1 est une position d'équilibre du véhicule 1 quand il est immergé, et dépend notamment de la position relative du centre de gravité et du centre de poussée, aussi appelé centre de carène ou de volume. Lorsque la vitesse d'avance du véhicule est nulle, la position nominale du véhicule, pour un véhicule de flottabilité nulle, se caractérise par le fait que le centre de gravité et le centre de poussée sont alignés selon la verticale (direction 23b orthogonale au plan horizontal 19).
- Le centre de gravité du véhicule 1 dépend de son architecture, c'est-à-dire de la répartition massique de son corps et des éléments qu'il comporte à l'intérieur de la coque. Le centre de poussée du véhicule, endroit du véhicule où les forces hydrostatiques, « poussée d'Archimède », sont appliquées, varie en fonction de la répartition des volumes dans le véhicule.
- La position d'équilibre peut varier lorsque le véhicule 1 est manœuvré, notamment lorsque la vitesse du véhicule 1 est modifiée, à cause de l'influence des forces hydrodynamiques.
- Egalement, il apparait nécessaire de modifier cette position d'équilibre du véhicule pour réaliser des opérations nécessitant des manœuvres de type changement d'orientation, telle que la mise à la verticale, telle qu'illustré à la
figure 2 , décrite ci-après. - Le véhicule 1 comprend donc des éléments permettant notamment de gérer la position relative du centre de gravité et du centre de poussée afin de modifier la position d'équilibre du véhicule 1 pour la réalisation des différentes manœuvres. En d'autres termes, cela revient à modifier l'angle d'assiette du véhicule 1.
- Comme indiqué précédemment, le véhicule sous-marin 1 comprend ici un propulseur 11 disposé à une extrémité de la coque 3 du véhicule et qui est apte à modifier la vitesse de déplacement du véhicule sous l'eau et aussi à manœuvrer le véhicule. Manœuvrer le véhicule sous-marin signifie permettre son déplacement selon les trois directions identifiées 23a, 23b, 23c par le référentiel 23 représenté sur la
figure 1 . - La poussée appliquée au véhicule 1 par le propulseur 11 entraine alors le véhicule 1 avec la partie 21, appelée le nez, en avant du reste du véhicule 1. Dans l'exemple illustré, le nez 21 et le propulseur 11 sont alignés le long de l'axe principal longitudinal 5 du véhicule 1.
- En complément du propulseur 11, le véhicule 1 comprend des caisses de réglage 7, 9 respectivement disposés à l'avant et l'arrière du véhicule 1. Il s'agit de caisses 7, 9 définissant un volume, partiellement remplies d'un liquide, tel que de l'eau ou de l'huile. Le volume de liquide contenu dans des caisses de réglages 7, 9 peut être modifié, de sorte à faire varier le centre de poussée du véhicule 1, permettant ainsi de faire varier l'angle d'assiette du véhicule 1. Dans l'exemple illustré, les caisses de réglage 7, 9 sont reliées l'une à l'autre par une canalisation, formant ainsi un circuit fermé.
- En variante, les caisses de réglages peuvent admettre du liquide (par exemple de l'eau de mer) de l'extérieur ou refouler du liquide vers l'extérieur. L'admission d'eau de mer, pour alourdir les caisses de réglage, peut se faire par le biais d'un robinet couplé à un limiteur de débit (notamment en cas de surpression à l'extérieur du véhicule). L'évacuation de l'eau des caisses réglages peut se faire par l'intermédiaire d'une pompe avantageusement couplée à un clapet de non-retour. Cette variation du volume global de liquide dans les caisses de réglages permet de faire varier le poids du véhicule dans l'eau. Ceci permet de rapprocher ou d'éloigner le véhicule de la surface.
- La variation du volume contenu dans les caisses de réglage 7, 9 permet de modifier la position du centre de poussée en modifiant la répartition du poids à l'intérieur de la coque 3 du véhicule.
- Ces caisses sont disposées, en général, à l'avant et à l'arrière de de du véhicule 1. Bien entendu, le véhicule 1 peut comprendre plusieurs autres caisses de réglage 7, 9, disposés différemment (à tribord et à bâbord par exemple).
- Ainsi, tel qu'évoqué précédemment, les propulseurs et les caisses de réglages peuvent être utilisés (quel que soit leurs positions) pour initier la mise à la verticale du véhicule 1, telle qu'illustré à la
figure 2 . - La
figure 2 illustre un exemple d'opération de surveillance d'une zone d'intérêt 13, nécessitant la mise à la verticale « permanente » du véhicule 1. - La mise à la verticale dite « permanente », c'est-à-dire pour une durée déterminée souhaitée, d'un véhicule 1 se révèle être un atout opérationnel lors de l'utilisation du véhicule 1 et en particulier lors de l'utilisation des capteurs embarqués du véhicule 1.
- En effet, l'utilisation des capteurs est moins impactée par la houle lorsque l'AUV est en position verticale plutôt qu'en position horizontale, assurant alors l'obtention de données de bonne qualité, le tout dans une grande discrétion.
- Egalement, lors des phases d'utilisation du système de géolocalisation et de navigation par satellite, une telle position verticale permanente de l'AUV peut se révéler intéressante, notamment pour mettre hors de l'eau les antennes de l'AUV, par exemple lors des phases de recalage du système de navigation, ou de phases de communication (radio ou satellite).
- De plus, la mise à la verticale permanente peut également se révéler avantageuse, notamment lors des phases de récupération en mer de l'AUV, en particulier pour récupérer l'AUV par le nez afin de l'extraire de l'eau.
- L'initiation de la mise à la verticale du véhicule 1 vise à faire passer le véhicule 1 de la position nominale (illustrée à la
figure 1 ) à une position proche de la verticale (illustrée à lafigure 2 ) : cela se fait en faisant varier l'angle d'assiette du véhicule, de sorte que le véhicule en équilibre dans l'eau, passe d'un angle d'assiette sensiblement nul à un angle d'assiette supérieur à 60°. - Dans l'exemple illustré, l'opération de surveillance vise à surveiller par le bais d'une caméra 25 la zone d'intérêt 13. La caméra 25 est disposée sur un bras rattaché à la coque 3 du véhicule 1. Ainsi, la caméra 25 embarquée est sortie au-dessus de la surface de l'eau 15 en direction de la zone d'intérêt 13 (par le biais d'un bras 27), et permet alors d'obtenir des images de la zone d'intérêt 13 dont la netteté est satisfaisante pour les activités de surveillance.
- L'initiation de la mise à la verticale peut se faire avec les caisses de réglages seules, notamment en alourdissant l'arrière du véhicule 1 par rapport à l'avant du véhicule. Pour cela, par exemple, la caisse de réglage arrière 9 est entièrement remplie de liquide, alors que la caisse de réglage avant 7 est entièrement remplie d'air. Ainsi, la position du centre de poussée est modifiée, de sorte que la position du centre de poussée est déplacée vers le nez 21 du véhicule engendrant une modification de l'angle d'assiette du véhicule.
- Dans certains cas, l'initiation de la mise à la verticale peut être effectuée par le biais du système propulsif, présentant une des configurations telles que présentées précédemment
- Comme cela est visible sur la
figure 2 , l'initiation de la mise en position verticale permet d'obtenir un angle d'assiette du véhicule 1 qui est de l'ordre de 70°, de sorte que l'axe longitudinal principal du véhicule n'est pas parallèle à la direction verticale 23b. - Le véhicule 1 comporte au surplus un ou plusieurs bras 24, 26 qui font partie du dispositif de mise à la verticale et qui sont montés par une extrémité proximale 24a, 26a sur la coque 3 et articulés en rotation par rapport à la coque 3, et comprenant un flotteur 28, 29 à une extrémité libre distale 24b, 26b. Ainsi qu'expliqué ci-après en détail, le ou les bras sont configurés pour prendre :
- une position repliée lorsque le véhicule est en position nominale avec un angle d'assiette sensiblement nul, dans laquelle le bras est sensiblement parallèle à l'axe principal longitudinal du véhicule et le flotteur est à proximité immédiate de la coque ;
- une position déployée dans laquelle le bras est incliné par rapport à l'axe principal longitudinal de sorte à amener et/ou stabiliser le véhicule en position dite verticale avec un angle d'assiette supérieur à 70° par rapport à sa position nominale (et idéalement de 90°).
- Tel qu'illustré aux
figures 3A, 3B, 4A et 4B , le véhicule autonome sous-marin 30 comprend un dispositif de mise à la verticale comprenant un seul bras 32. Le bras 32 comprend deux extrémités, une extrémité distale et une extrémité proximale. L'extrémité proximale est l'extrémité du bras 32 qui est monté en rotation sur la coque 40 du véhicule 30 et l'extrémité distale comprend un flotteur 34, c'est-à-dire un élément dont la densité volumique est inférieure à celle de l'eau. Le flotteur 34 est solidaire du bras 32. - Comme cela est visible sur les
figures 3A et 3B , le bras est apte à être disposé dans une position repliée dans laquelle le flotteur 34 est ici escamoté à l'intérieur de la coque 40 du véhicule 30. Dans cette position repliée, le bras est disposé sensiblement parallèlement à l'axe principal longitudinal 38 du véhicule 30, de sorte à ne pas être en saillie par rapport à la coque 40 du véhicule 38, et donc ne pas impacter le déplacement du véhicule 30 (par la création des efforts de trainée). - Le bras 32 est monté en rotation sur la coque 40 de sorte à être au moins mobile en rotation et former un angle par rapport à l'axe principal longitudinal 38 en position déployée, tel qu'illustré aux
figures 4A et 4B . - L'axe de rotation est un axe orthogonal à l'axe principal longitudinal 5, et orienté selon la direction 23c du référentiel 23 reproduit sur les
figures 4A et 4B . La rotation du bras 32 de la position repliée à la position déployée permet de placer le flotteur 34 à distance de la coque 40 du véhicule 30. - En disposant ainsi le flotteur 34 à distance de la coque 40 du véhicule, la flottabilité du flotteur agit sur la position du centre de poussée du véhicule.
- En effet, lorsque le bras 32 est en position déployée, le flotteur 34 est placé à distance de la coque 40 du véhicule 30, de sorte que cela influe sur la position du centre de poussée du véhicule 30. En particulier, le flotteur 34 permet de déplacer à distance de la coque 40 du véhicule 30 un volume d'eau, de sorte que la position des forces hydrostatiques appliquées au véhicule 30 est modifiée engendrant la modification de la position du centre de poussée. Le déploiement des bras permet alors d'agir principalement sur la position du centre de poussée, en le déplaçant vers le nez 42 du véhicule 1.
- Ainsi, lors du déploiement du bras 32, le véhicule peut continuer son mouvement vers la verticale et la stabilité du véhicule en position verticale peut être améliorée. Les caractéristiques des bras et des flotteurs sont choisies de sorte à permettre, lors du déploiement du bras, de déplacer le centre de poussée vers le nez 42.
- Le bras 32 est disposé de manière avantageuse, au niveau de la coque inférieure du véhicule 30.
- Le bras de cet exemple est qualifié de bras passif, car son positionnement relativement à l'axe principal longitudinal 38 dépend des caractéristiques du flotteur (par exemple sa flottabilité) mais également de la longueur du bras.
- Selon certains modes de réalisation, le bras 32 et le flotteur 34 sont configurés pour que, en position déployée, le bras 32 est sensiblement perpendiculaire à l'axe principal longitudinal 38 du véhicule autonome sous-marin 30. Dans certains modes de réalisation, le bras 32, en position déployée, forme un angle avec l'axe principal longitudinal 38 du véhicule 1 compris dans la plage [80 ;100].
- Le déploiement du bras peut être déclenché par le biais d'un actionneur ou par l'amorce du mouvement de mise à la verticale, tel qu'illustré sur les
figures 4A et 3A (flèche 41). - Dans un mode de réalisation, le déploiement du bras peut être fait par le biais d'un organe d'actionnement permettant alors au bras de passer d'une position repliée à une position déployée uniquement. Ainsi, le bras, une fois déployé, ne peut être replié dans la position repliée, dans laquelle le flotteur est escamoté dans la coque. Une telle solution est particulièrement adaptée dans le cadre des véhicules autonomes sous-marins dits consommables, utilisables une seule fois en mer.
- En particulier, l'organe d'actionnement comprend un ressort agencé entre le bras 32 et la coque 40 du véhicule 30 et un interrupteur (de type clapet par exemple, tout ou rien) configuré pour activer le ressort, pour que ce dernier exerce une force sur le bras 32 pour le faire passer d'une position repliée, sensiblement perpendiculaire à l'axe principal 38, à une position déployée. Par activer, on entend que l'interrupteur est configuré pour permettre au ressort d'appliquer une force sur le bras 32, de sorte qu'il vienne prendre une position déployée.
- Bien que seul un bras ne soit illustré, il est possible d'avoir deux bras ou plus, fixés à la coque, de préférence à la coque inférieure, à bâbord et à tribord. Les bras sont alors agencés de préférence de sorte à former un angle compris dans la plage [60° ;180°[.
- Le fonctionnement de ces bras 32 dits passifs nécessite une amorce d'une mise à la verticale (comme décrit plus haut), et cela par le bais des caisses de réglages (non visibles) et/ou par le système propulsif 36 du véhicule.
- Pour une mise à la verticale avec ce bras 32 passif, les caisses de réglages et/ou le système propulsif 36 sont commandés pour amorcer une mise à la verticale, et le bras 32 passif est alors déployé pour avoir une action synergique avec les caisses de réglages et/ou la propulsion 36. Lorsque le déploiement du bras 32 se fait par le biais d'un organe d'actionnement, le bras 32 est alors déployé « au bon moment » lorsque l'amorce de la mise à la verticale permet au véhicule d'avoir un angle d'assiette de l'ordre de 70°, permettant d'améliorer la verticalité et la tenue de l'AUV en position verticale.
- Dans le cas où le véhicule comprend plus d'un bras 32, le déploiement des bras peut être fait simultanément ou les uns après les autres selon une séquence, tel que par exemple tribord puis bâbord.
- En référence maintenant aux
figures 5A, 5B, 6A et 6B , le véhicule 50 comprend deux bras 52, 62 comprenant respectivement deux flotteurs 54, 64 à leur extrémité distale. Les bras sont rattachés de préférence à la coque inférieure, respectivement à bâbord et à tribord. De manière avantageuse, les bras sont disposés de sorte à former un angle 66 compris dans la plage [60° ;180°[. - Les bras 52, 62 sont actionnables par le biais d'un organe d'actionnement permettant à l'un des bras de passer d'une position repliée à une position déployée et inversement.
- Dans un mode de réalisation, l'organe d'actionnement permettant de déployer les bras 52, 62 et inversement, comprend notamment un moteur, apte à orienter les bras 52, 62 dans plusieurs positions angulaires par rapport à l'axe principal longitudinal. Ainsi, les bras motorisés 52, 62 sont orientables au moins autour de leurs axes de rotation (comme indiqué précédemment, orthogonal à l'axe principal longitudinal 58 du véhicule 50) de sorte à permettre le déploiement des bras 52, 62 dans des positions déployées sélectionnées, par exemple selon l'angle entre l'axe principal longitudinal 58 du véhicule 50 et du bras 52, 62.
- Dans un mode de réalisation, l'organe d'actionnement, i.e. le moteur, est configuré pour adapter une position angulaire du bras en position déployée, par rapport à l'axe principal longitudinal selon l'angle d'assiette du véhicule. Par exemple, le véhicule 50 peut comprendre un capteur de verticalité, tel qu'un ou plusieurs accéléromètres, de sorte que la position angulaire du bras est contrôlée et commandée en fonction du signal de sortie du capteur de verticalité.
- Ainsi, la valeur de l'angle entre le bras et la coque du véhicule peut être régulée. Cela permet notamment d'assurer une bonne verticalité de l'AUV, même en cas de perturbations de l'environnement, tel que par exemple en cas de houle, ou en lien avec la densité de l'eau.
- Le contrôle actif de la position du bras par rapport à la coque 60 du véhicule 50 permet de stabiliser dynamiquement le véhicule 50. Les deux bras motorisés 52, 62 permettent de manœuvrer le véhicule quelle que soit sa vitesse, et même à vitesse nulle.
- Dans un mode de réalisation, le flotteur est configuré pour avoir un volume variable. Ainsi, selon par exemple les conditions environnementales (telle qu'une apparition brusque d'une houle inhabituelle), il est possible d'augmenter la capacité de flottabilité du flotteur et donc stabiliser le véhicule.
- Dans un mode de réalisation, le bras est télescopique, si bien que la longueur des bras peut être réglable. Ainsi, l'effet des bras sur le centre de poussée peut être modifié en faisant varier la longueur des bras.
- Bien entendu dans un mode avantageux, il est possible de faire varier le volume du flotteur et la longueur du bras.
- Bien que dans l'exemple illustré, le véhicule 50 comprend deux bras actifs 52, 62, il peut dans un mode de réalisation comprendre un seul bras actif, ou plus de deux bras actifs.
- Dans un mode de réalisation, le dispositif de mise à la verticale comprend en plus des bras actifs d'autres éléments, tels que les caisses de réglages et/ou le système propulsif 56. Dans ce cas, les bras 52, 62 sont déployés après que la mise à la verticale soit initiée par les caisses de réglages et/ou le système propulsif 56.
- Dans un mode de réalisation, le dispositif de mise à la verticale est alors configuré pour commander les bras 52, 62 et/ou les caisses de réglages et/ou le système propulsif 56. Dans un mode avantageux, le dispositif de mise à la verticale comprend une unité de commande capable de commander des différents éléments, afin d'assurer la synchronisation de leurs impacts sur le centre de poussée du véhicule 80.
- L'utilisation des bras motorisés en compléments de caisses de réglages est illustrée aux
figures 8 à 10 . - Le véhicule 80 illustré sur ces figures est globalement cylindrique, fait environ 6,5 m de long et présente un diamètre d'environ 0,5m. Ce véhicule 80 présente une masse d'environ 1200 kg et lorsqu'il est immergé, ce véhicule 80 déplace environ 1 100 litres d'eau.
- Les caisses de réglages 82, 84 du véhicule 80, ont respectivement un volume maximum de 55 litres. Ces caisses de réglages 82, 84 sont respectivement disposées à 2m derrière et devant le centre de gravité (CDG) et le centre de poussé (CDC pour centre de carène sur les figures) qui sont alignés selon la verticale. La caisse de réglage 82 arrière est ainsi disposée entre le centre de gravité (ou de poussée) et le système propulsif 88, et la caisse de réglage 84 avant est disposées entre le centre de gravité (ou de poussée) et le nez 83 du véhicule 80.
- Comme on peut le voir sur les
figures 7 à 9 , le véhicule autonome sous-marin 80 comprend des caisses de réglages 82, 84 qui sont disposées, lorsque le véhicule 80 est en position nominale, dans une partie supérieure 96 de la coque 86 et les bras sont rattachés à une partie inférieure 94 de la coque 86 du véhicule 80. - Comme on peut le voir sur les figures, de manière générale, les caisses de réglages 82, 84 et les bras 90 sont disposés de part et d'autre de l'axe principal longitudinal 99.
- Dans le mode de réalisation illustré, les caisses de réglage sont disposées à l'intérieure de la coque du véhicule 80, en particulier dans une partie dite supérieure 96, qui, lorsque le véhicule 80 navigue en position nominale, est dirigée vers la surface 85. Les bras sont attachés à la partie inférieure 94 de la coque 86, qui lorsque le véhicule 80 navigue en position nominale, est dirigé vers le fond marin 87.
- Les caisses de réglages permettent de faire varier l'angle d'assiette du véhicule 80. Dans ce mode de réalisation, seul les caisses de réglages permettent de faire varier l'angle d'assiette du véhicule. Les
figures 7, 8 et9 illustrent trois configurations des caisses de réglages 82, 84, dans lesquelles le véhicule 80 présente respectivement un angle d'assiette nul, un angle d'assiette positif et un angle d'assiette négatif, lorsqu'immergé dans l'eau de mer (avec une masse volume estimée à 1030 kg/m3). - Dans le premier cas où l'angle d'assiette est nul, i.e. lorsque le véhicule 80 est en position nominale, les caisses de réglages sont remplies 60% d'air à l'avant et à 20 % d'air à l'arrière.
- Dans le deuxième cas, où l'angle d'assiette est sensiblement positif, l'inclinaison longitudinale du véhicule 80 par rapport au plan horizontal 98 entraine le nez 83 du véhicule en direction de la surface de l'eau 85. Dans ce cas, le remplissage des caisses de réglages est modifié de sorte que la caisse de réglage arrière 82 présente un taux de remplissage supérieur au taux de remplissage de la caisse de réglage avant 84.
- Dans le troisième cas, où l'angle d'assiette est sensiblement négatif, l'inclinaison longitudinale du véhicule 80 par rapport au plan horizontal 98 entraine le nez 83 du véhicule en direction du fond 87. Dans ce cas, le remplissage des caisses de réglages est modifié de sorte que la caisse de réglage avant 84 présente un taux de remplissage supérieur au taux de remplissage de la caisse de réglage arrière 82.
- Deux bras 92 sont montés en rotation sur la coque 86 du véhicule 80. A l'extrémité libre du bras 92, un flotteur 90 est monté.
- Dans cet exemple, le flotteur présente un volume d'environ 10 litres (soit 20 litres pour les deux bras). De plus, les bras 92 configurés pour être déployés présentent une longueur d'environ 2m.
- L'axe de rotation des bras est ici orthogonal à l'axe principal longitudinal 99.
- Pour la mise à la verticale, les caisses de réglages 82, 84 sont utilisées conjointement avec les bras 92.
- Pour une mise à la verticale du véhicule 80 tel que décrit précédemment, et pour assurer une flottabilité nulle du véhicule 80 en position verticale en eau de mer, les caisses de réglages sont remplies d'air à 80 % à l'avant et à 0% à l'arrière 82. En d'autres termes, la caisse de réglage 82 arrière doit être intégralement remplie de liquide.
- Ainsi réglées, les caisses de réglages permettent de générer un angle d'assiette du véhicule de maximum 75°. L'action des bras, par leur déploiement, permet une régulation de la verticalité du véhicule 80, dans un domaine de +/-12° d'angle d'assiette autour de la verticale (c'est-dire autour d'un angle d'assiette de 90°).
- Comme cela est visible sur la
figure 10 , les bras 92a, 92b peuvent être positionnés dans plusieurs positions isolées (dont certaines sont représentées en pointillés sur lafigure 10 ). Ainsi, selon les conditions environnementales dans lequel le véhicule évolue et selon les caractéristiques du véhicule 80, la position des bras est commandée pour prendre une ou plusieurs positions isolées, lorsque le véhicule initie une mise à la verticale ou lorsque le véhicule est en position verticale, de sorte à former un angle supérieur à 0° et inférieur à 180° avec l'axe principal longitudinal du véhicule 80. - Le déploiement d'un ou des bras dans une des positions déployées telles qu'illustrées sur la
figure 10 se fait selon un procédé comprenant notamment une étape dans laquelle, lorsque l'angle d'assiette du véhicule atteint un premier angle seuil, le ou les bras est/sont actionnés pour les mettre en position déployée, à partir de la position repliée. - A titre d'exemple, le déploiement des bras du véhicule 80 peut être effectué suite à une modification de l'angle d'assiette du véhicule, par exemple par l'utilisation des caisses de réglages 82, 84 et/ou le système propulsif, de sorte que cet angle d'assiette devient supérieur à égale au premier angle seuil.
- Dans un mode de réalisation, la mise à la verticale du véhicule 80 est initiée au préalable du déploiement des bras, et effectuée par exemple par le biais des caisses de réglages 82, 84 et/ou du système propulsif.
- Par exemple, l'initialisation de la mise à la verticale par le biais des caisses de réglages permet au véhicule 80 d'atteindre un angle d'assiette d'environ 75°.
- Dans un mode de réalisation, le premier angle seuil de 70° peut être spécifié, de sorte que les bras soient déployés lorsque l'angle d'assiette du véhicule 80 dépasse 70° par le biais des caisses de réglages.
- Le procédé peut également comprendre une étape de repli du ou des bras du véhicule 80, lorsque l'angle d'assiette du véhicule 80 devient inférieur à un deuxième angle seuil.
- Ainsi, lorsque le véhicule est manœuvré pour reprendre une position nominale en vue d'une navigation subséquente, les bras sont configurés pour être actionnés et repliés, lorsque l'angle d'assiette devient inférieur à la deuxième valeur seuil.
Claims (14)
- Véhicule autonome sous-marin (1, 30, 50, 80) comprenant une coque (3, 40, 60, 86) s'étendant selon un axe principal longitudinal (5, 38, 58, 99), au moins un dispositif de mise à la verticale du véhicule configuré pour modifier un angle d' assiette du véhicule (1, 30, 50, 80) entre une position nominale horizontale du véhicule et une position verticale du véhicule, le dispositif de mise à la verticale du véhicule comprend un ou plusieurs bras (24, 26, 32, 52, 62, 92) montés par une extrémité proximale (24a, 26a) sur la coque (3, 40, 60, 86) et articulés en rotation par rapport à la coque (3, 40, 60, 86), caractérisé en ce que le bras comprend un flotteur (28, 29, 34, 54, 64, 90) à une extrémité libre distale (24b, 26b) de sorte que le bras (24, 26, 32, 52, 62, 92) est configuré pour prendre:- une position repliée lorsque le véhicule est en position nominale avec un angle d'assiette sensiblement nul, dans laquelle le bras (24, 26, 32, 52, 62, 92) est sensiblement parallèle à l'axe principal longitudinal (5, 38, 58, 99) du véhicule (1, 30, 50, 80) et le flotteur (28, 29, 34, 54, 64, 90) est à proximité immédiate de la coque (3, 40, 60, 86) ;- une position déployée dans laquelle le bras (24, 26, 32, 52, 62, 92) est incliné par rapport à l'axe principal longitudinal (5, 38, 58, 99) de sorte à amener et/ou stabiliser le véhicule (1, 30, 50, 80) en position dite verticale avec un angle d'assiette supérieur à 70° par rapport à sa position nominale.
- Véhicule autonome sous-marin (1, 50, 80) selon la revendication 1, comprenant au moins deux bras (24, 26, 52, 62, 92), fixés à la coque à bâbord et à tribord, agencés de sorte à former un angle (66) compris dans la plage [60° ;180°[.
- Véhicule autonome sous-marin (1, 30, 50, 80) selon l'une des revendications 1 et 2, comprenant au moins un organe d'actionnement permettant au bras (24, 26, 32, 52, 62, 92) de passer de la position repliée à la position déployée.
- Véhicule autonome sous-marin (50, 80) selon la revendication 3, dans lequel l'organe d'actionnement permet en outre au bras (52, 62, 92) de passer de la position déployée à la position repliée.
- Véhicule autonome sous-marin (50, 80) selon la revendication 4, dans lequel l'organe d'actionnement est apte à orienter le bras (52, 62, 92) dans une position angulaire déterminée ou sélectionnée par rapport à l'axe principal longitudinal (58, 99).
- Véhicule autonome sous-marin (50, 80) selon la revendication 5, dans lequel l'organe d'actionnement est configuré pour adapter, selon l'angle d'assiette du véhicule, la position angulaire du bras (52, 62, 92) en position déployée, par rapport à l'axe principal longitudinal (58, 99).
- Véhicule autonome sous-marin (50, 80) selon l'une des revendications 4 et 5, comprenant en outre un capteur de verticalité, tel qu'un accéléromètre, de sorte que la position angulaire du bras (52, 62, 92) est commandée en fonction du signal de sortie du capteur de verticalité.
- Véhicule autonome sous-marin (1, 30, 50, 80) selon l'une quelconque des revendications 1 à 7, dans lequel le flotteur (28, 29, 34, 54, 64, 90) a un volume variable.
- Véhicule autonome sous-marin (1, 30, 50, 80) selon l'une quelconque des revendications 1 à 8, dans lequel au moins l'un des bras (24, 26, 32, 52, 62, 92) est télescopique.
- Véhicule autonome sous-marin (1, 80) selon l'une quelconque des revendications 1 à 9 comprenant une ou plusieurs caisses de réglage (7, 9, 82, 84) et/ou un ou plusieurs propulseurs, aptes à faire varier l'angle d'assiette du véhicule (1, 80).
- Véhicule autonome sous-marin (1, 80) selon la revendication 10, dans lequel les caisses de réglages (7, 9, 82, 84) sont disposées, lorsque le véhicule (1, 80) est en position nominale, dans une partie supérieure de la coque (3, 86) et les bras (24, 26, 92) sont rattachés à une partie inférieure de la coque (3, 86) du véhicule (1, 80).
- Procédé de mise à la verticale d'un véhicule autonome sous-marin (1, 30, 50, 80) selon l'une quelconque des revendications précédentes, comprenant l'actionnement d'un bras (24, 26, 32, 52, 62, 92) pour le mettre en position déployée, à partir de la position repliée, notamment lorsque l'angle d'assiette du véhicule (1, 30, 50, 80) atteint un premier angle seuil.
- Procédé de mise à la verticale selon les revendications 10 et 12, comprenant au préalable l'initiation de la mise à la verticale du véhicule (1, 80) par le biais des caisses de réglage (7, 9, 82, 84) ou des propulseurs du véhicule (1, 80).
- Procédé de mise à la verticale selon l'une des revendications 12 et 13 comprenant l'actionnement d'un bras (52, 62, 92) pour le mettre en position repliée à partir de la position déployée lorsque l'angle d'assiette du véhicule (50, 80) est inférieur à un deuxième angle seuil.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR2106967A FR3124486B1 (fr) | 2021-06-29 | 2021-06-29 | Dispositif de mise à la verticale pour véhicule sous-marin |
| PCT/FR2022/051275 WO2023275476A1 (fr) | 2021-06-29 | 2022-06-28 | Dispositif de mise à la verticale pour véhicule sous-marin |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP4363306A1 EP4363306A1 (fr) | 2024-05-08 |
| EP4363306B1 true EP4363306B1 (fr) | 2025-05-21 |
Family
ID=81327658
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP22744291.0A Active EP4363306B1 (fr) | 2021-06-29 | 2022-06-28 | Dispositif de mise à la verticale pour véhicule sous-marin |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20240294241A1 (fr) |
| EP (1) | EP4363306B1 (fr) |
| FR (1) | FR3124486B1 (fr) |
| WO (1) | WO2023275476A1 (fr) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN116812118B (zh) * | 2023-08-30 | 2023-12-22 | 自然资源部第一海洋研究所 | 一种基于保形支撑式的auv海底着陆装置及其方法 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006232070A (ja) * | 2005-02-24 | 2006-09-07 | Mitsui Eng & Shipbuild Co Ltd | グライド型水中航走体の姿勢制御方法、無線連絡方法及びグライド型水中航走体 |
| US9487282B2 (en) * | 2014-04-08 | 2016-11-08 | Mrv Systems, Llc | Underwater vehicles configured to perform vertical profiling and diagonal profiling, and corresponding methods of operation |
| US9381987B1 (en) * | 2015-10-01 | 2016-07-05 | Mrv Systems, Llc | Air-based-deployment-compatible underwater vehicle configured to perform vertical profiling and, during information transmission, perform motion stabilization at a water surface, and associated methods |
| CN205916310U (zh) * | 2016-07-06 | 2017-02-01 | 中国船舶重工集团公司第七一九研究所 | 一种深海无人潜航器 |
-
2021
- 2021-06-29 FR FR2106967A patent/FR3124486B1/fr active Active
-
2022
- 2022-06-28 US US18/569,644 patent/US20240294241A1/en active Pending
- 2022-06-28 WO PCT/FR2022/051275 patent/WO2023275476A1/fr not_active Ceased
- 2022-06-28 EP EP22744291.0A patent/EP4363306B1/fr active Active
Also Published As
| Publication number | Publication date |
|---|---|
| FR3124486A1 (fr) | 2022-12-30 |
| FR3124486B1 (fr) | 2025-05-23 |
| WO2023275476A1 (fr) | 2023-01-05 |
| US20240294241A1 (en) | 2024-09-05 |
| EP4363306A1 (fr) | 2024-05-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1897799B1 (fr) | Dispositif de stabilisation dynamique d'un engin sous-marin | |
| EP3906188B1 (fr) | Dispositif d'accueil pour un vehicule sous-marin | |
| EP0385827A1 (fr) | Dispositif de propulsion pour véhicule sous-marin | |
| WO2020136113A1 (fr) | Dispositif d'accueil pour un vehicule sous-marin | |
| EP3168126B1 (fr) | Aile portante en forme de t inversé adaptée pour être installée sur un bateau | |
| EP4363306B1 (fr) | Dispositif de mise à la verticale pour véhicule sous-marin | |
| FR2709469A1 (fr) | Ensemble de propulsion pour véhicule sous-marin sans équipage. | |
| EP3728020B1 (fr) | Procede de reglage de la flottabilite d'un vehicule sous-marin | |
| EP0694008B1 (fr) | Hydroptere a voile | |
| EP3728019A1 (fr) | Vehicule apte a etre immerge comprenant un mat | |
| EP1794049B1 (fr) | Dispositif de destruction d'objets sous-marins ou flottants | |
| EP2353991A2 (fr) | Véhicule à hydrofoil | |
| FR2710897A1 (fr) | Véhicule sous-marin autonome utilisant du gaz comprimé comme source d'énergie associé à des surfaces prenant appui sur l'eau. | |
| EP4493456B1 (fr) | Véhicule tracté sous-marin et système de récupération d'un tel véhicule sous-marin | |
| WO2025125765A1 (fr) | Dispositif de propulsion nautique et navire équipé du dispositif de propulsion | |
| CH721820A2 (fr) | Système de transport à hydroptère | |
| CH720731A2 (fr) | Système de transport à hydroptère comportant au moins un hydroptère | |
| CH720795A2 (fr) | Système de transport à hydroptère à stabilité améliorée | |
| WO2024224248A1 (fr) | Systeme de transport a hydroptere | |
| FR3148213A1 (fr) | Systeme de transport a hydroptere | |
| FR3148779A1 (fr) | Systeme de transport a hydroptere a stabilite amelioree | |
| FR3162201A1 (fr) | Systeme de transport a hydroptere | |
| WO2024236531A1 (fr) | Système de transport à hydroptère à stabilité améliorée | |
| WO1989011997A1 (fr) | Vehicule sous-marin autopropulse pour la detection d'objets immerges | |
| WO2025238609A1 (fr) | Système de transport à hydroptère |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: UNKNOWN |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE INTERNATIONAL PUBLICATION HAS BEEN MADE |
|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20231226 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| DAV | Request for validation of the european patent (deleted) | ||
| DAX | Request for extension of the european patent (deleted) | ||
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTG | Intention to grant announced |
Effective date: 20250219 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 602022014990 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: FRENCH |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20250627 Year of fee payment: 4 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IS Payment date: 20250626 Year of fee payment: 4 Ref country code: NO Payment date: 20250627 Year of fee payment: 4 |
|
| REG | Reference to a national code |
Ref country code: SE Ref legal event code: TRGR |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20250527 Year of fee payment: 4 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: AT Payment date: 20250721 Year of fee payment: 4 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20250521 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250521 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250922 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250521 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG9D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250822 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250521 Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250521 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: TR Payment date: 20250716 Year of fee payment: 4 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250521 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250521 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: SE Payment date: 20250630 Year of fee payment: 4 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250821 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250521 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MK05 Ref document number: 1796545 Country of ref document: AT Kind code of ref document: T Effective date: 20250521 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250521 Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250521 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250521 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250521 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250521 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250521 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: H13 Free format text: ST27 STATUS EVENT CODE: U-0-0-H10-H13 (AS PROVIDED BY THE NATIONAL OFFICE) Effective date: 20260127 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250521 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20250628 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250521 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 602022014990 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20250630 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250521 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: L10 Free format text: ST27 STATUS EVENT CODE: U-0-0-L10-L00 (AS PROVIDED BY THE NATIONAL OFFICE) Effective date: 20260402 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20250628 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20250630 |