EP4399174B1 - Nacelle pour le travail en élévation, procédé de commande et ensemble comprenant une telle nacelle - Google Patents
Nacelle pour le travail en élévation, procédé de commande et ensemble comprenant une telle nacelle Download PDFInfo
- Publication number
- EP4399174B1 EP4399174B1 EP22786056.6A EP22786056A EP4399174B1 EP 4399174 B1 EP4399174 B1 EP 4399174B1 EP 22786056 A EP22786056 A EP 22786056A EP 4399174 B1 EP4399174 B1 EP 4399174B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- platform
- anchoring
- movement
- driving
- warning signal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F17/00—Safety devices, e.g. for limiting or indicating lifting force
- B66F17/006—Safety devices, e.g. for limiting or indicating lifting force for working platforms
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F11/00—Lifting devices specially adapted for particular uses not otherwise provided for
- B66F11/04—Lifting devices specially adapted for particular uses not otherwise provided for for movable platforms or cabins, e.g. on vehicles, permitting workmen to place themselves in any desired position for carrying out required operations
Definitions
- the present invention relates to a nacelle for working at elevation, its control method, as well as an assembly comprising such a nacelle.
- Such a nacelle with an operator wearing a safety harness equipped with a lanyard terminated by a carabiner capable of being attached to the platform of the nacelle to protect the operator from a fall from the platform is known as illustrated in the patent US9245434 , which includes the technical characteristics of the preamble of claim 1.
- the documents US 2019/152753 And US6330931 illustrate a safety system that allows an alert signal to be emitted when the operator is not properly attached to the platform.
- a radical solution may be to prevent any operation of the platform until the carabiner is not attached to the platform.
- this solution poses many problems and can be potentially dangerous.
- An aim of the invention is to propose a nacelle and an assembly comprising such a nacelle whose designs enable the operator to be alerted in an optimized manner.
- control unit is configured to, in the unoccupied state of the anchoring location, command the emission of an alert signal of which the intensity and/or frequency and/or tone, i.e. the color, for a light warning signal, or the melody, for an audible warning signal, varies at least as a function of the position of the lifting structure, the operator who has not attached his safety equipment to the platform can be alerted according to the level of risk of falling from the platform.
- This design makes it possible to alert the operator in proportion to the risk incurred.
- this design makes it possible to alert the operator more specifically when he controls the basket for the transition of the basket from a so-called transport configuration which corresponds to a low position or a range of determined low positions of the lifting structure to a so-called work configuration in which the platform of the basket can be raised to a significant height.
- the lifting structure comprises a lifting arm mounted to pivot relative to the chassis between a low position and a high position and the system for determining the position of the lifting structure of the platform is a system for determining the position of the lifting arm of said lifting structure.
- the control unit can therefore be configured to, in the unoccupied state of the anchoring location, control the emission of a warning signal whose intensity and/or frequency and/or tone, i.e. the color, for a light warning signal, or the melody, for an audible warning signal, varies at least as a function of the position of the lifting arm of the lifting structure.
- the control unit can thus be configured to, in the unoccupied state of the anchoring location, control the emission of a so-called "loud" warning signal, i.e., whose intensity and/or frequency and/or tone is modified so that it can be understood as an increase in risk by the operator, when the lifting arm leaves the low position.
- This movement of the lifting arm away from the low position corresponds for a large number of cradles to the transition of the cradle from the transport configuration in which movement on the ground of the cradle chassis is possible to the work configuration in which such movement on the ground of the cradle chassis at a high speed is no longer possible.
- the device for driving the platform to move relative to the chassis comprises at least one actuator, such as a cylinder, for driving the movement of the lifting arm and the system for determining the position of the lifting arm of the platform comprises at least one position sensor of the lifting arm and/or a position sensor of said actuator.
- actuator such as a cylinder
- the lifting arm of the platform is coupled to the platform by a pendulum arm and the controls of the platform movement drive device equipping the control console comprise at least one control for movement of the pendulum arm and one control for movement of the lifting arm. It is thus possible when the detection of the position of the lifting structure takes place at the level of the lifting arm to emit a "low" alert signal when only the pendulum arm is driven in movement while the lifting arm is still in the low position.
- the chassis is equipped with a ground movement drive system for said chassis and the control console is equipped with at least one control member for the ground movement drive system for said chassis.
- the control unit is configured to authorize/prohibit the control of the ground movement drive system of the chassis from the control console based on the data provided by the system for determining the position of the lifting structure of the platform.
- the platform comprises at least one activation/inactivation member for at least part of the control(s) of the platform movement drive device equipping the control console, said activation/inactivation member being mounted to move between an inactive position in which at least part of the control(s) of the platform movement drive device is inactive and an active position in which at least part of the control(s) of the platform movement drive device is activated, and the control unit is configured, in the unoccupied state of the anchoring location, to control the emission of an alert signal whose intensity and/or frequency and/or tone, i.e. the color for a signal light alert or the melody for an audible alert signal varies at least as a function of the position of said activation/inactivation member.
- an alert signal whose intensity and/or frequency and/or tone, i.e. the color for a signal light alert or the melody for an audible alert signal varies at least as a function of the position of said activation/inactivation member.
- the activation/inactivation member is a pedal or a lever, such as a trigger, equipped with at least one return member in the inactive position and is configured to move from the inactive position to the active position under the action of a thrust exerted on said activation/inactivation member against said at least one return member.
- This activation/inactivation member is frequently called a dead man's pedal or lever or trigger. Again, the activation of such a member signals the operator's desire to move the chassis or the platform and allows the control unit to command the emission of an alert signal taking into account this increased risk of the platform falling.
- the platform comprises a floor and a guardrail surrounding at least part of the floor and the or at least one of the anchoring locations has the form of a frame delimiting an opening, said frame being arranged at the level of the guardrail.
- the carabiner only needs to surround one edge of the frame to be fixed to the frame. This results in simplicity of implementation.
- the system for detecting the occupied or unoccupied state of the anchoring location comprises, arranged along one face of the frame formed by the anchoring location, a mechanical member mounted to move between a position close to the anchoring location corresponding to the unoccupied position of the anchoring location and a position separated from the anchoring location corresponding to the occupied position of the anchoring location, an element for returning said mechanical member to a position close to the anchoring location and a sensor for determining the position of said mechanical member and the control unit is configured to acquire the data provided by said sensor for determining the position of said mechanical member.
- the device for emitting a light or sound alert signal comprises at least one lighting member, such as than a light-emitting diode, arranged around the or at least one of the anchoring locations within a radius of less than 15 cm. It is at least at the level of this lighting device that the luminous warning signal is emitted.
- This arrangement makes it possible to direct the operator's eye in the direction of the anchoring location to remind him that he has not attached his safety equipment to the platform.
- the device for emitting a light or sound alert signal comprises a light indicator arranged on the control console. It is at least at the level of this light indicator that the light alert signal can be emitted. This redundancy of the alert signal makes it possible to avoid the operator not being able to see the light alert signal.
- the subject of the invention is a nacelle 1 allowing work by lifting people as well as an assembly comprising such a nacelle 1 and safety equipment 21 equipped with an anchoring device 22 which will be described below.
- This nacelle 1 comprises a chassis 2.
- This chassis 2 is preferably a self-propelled chassis 2, that is to say motorized, equipped with a motor system for driving the chassis 2 for movement on the ground 15.
- chassis 2 is a rolling chassis 2 of which at least some of the wheels are driven.
- chassis 2 is equipped with four wheels.
- chassis 2 could be equipped with tracks or other drive members for moving the chassis 2 on the ground, without departing from the scope of the invention.
- the ground movement drive system 15 of the chassis 2 therefore comprises one or more motors.
- one or more wheels of the chassis 2 are drive wheels.
- the drive wheels are wheels connected to an electric motor integrated into the chassis 2.
- certain wheels are steered wheels, having a variable orientation relative to the chassis 2, to enable the nacelle 1 to be steered.
- the electric motor(s) may be replaced by a thermal engine connected to the wheels via a transmission, preferably hydrostatic, which may include a hydrostatic pump and hydraulic motors each associated with a so-called drive wheel.
- a transmission preferably hydrostatic, which may include a hydrostatic pump and hydraulic motors each associated with a so-called drive wheel.
- ground travel drive system 15 of the chassis 2 will not be described in detail, as it is well known to those skilled in the art.
- the nacelle 1 also includes a platform 3 having an area 4 for receiving an operator.
- This work platform 3 is here formed of a floor 18 and a guardrail 19 surrounding the floor while allowing access to the interior of said platform 3.
- Operator 20 is generally standing inside the reception area 4 of the operator of platform 3.
- the nacelle 1 also comprises a device 5 for driving the platform 3 to move relative to the chassis 2, arranged at least partially between the chassis 2 and the platform 3.
- This device 5 for driving the platform 3 in movement can affect a large number of shapes.
- This device 5 for driving the platform 3 in movement comprises at least one structure 6 for raising the platform 3 mounted to move at least in the direction of raising and lowering said platform 3.
- the lifting structure 6 comprises a lifting arm 61 mounted to pivot relative to the chassis 2 between a low position and a high position.
- the pivot axis of the lifting arm 61 extends horizontally in the positioned state of the nacelle 1 on a horizontal support plane.
- the platform 3 can be arranged directly at the end of this lifting arm 61.
- the lifting arm 61 of the platform 3, arranged between the chassis 2 and the platform 3, is coupled to the platform 3 by a pendulum arm 62.
- the device 5 for driving the platform 3 to move relative to the chassis 2 comprises at least one actuator 14, such as a jack, for driving the lifting arm 61 to move between a high position and a low position.
- a first actuator 14 is arranged between the chassis 2 and the lifting arm 61.
- a second actuator is arranged between the lifting arm 61 and the pendulum arm 62.
- a third actuator may also be provided between the platform 3 and the pendulum arm 62 when it is present or between the lifting arm 61 and the platform 3.
- the lifting structure 6 may comprise one or more superimposed scissors, two of the ends of the scissors, or of the uppermost scissors in the case of a superposition of scissors, are connected to the platform.
- one or more actuators enable movement of such a movably mounted lifting structure 6 between a lower, folded scissor position and a higher, deployed scissor position.
- the nacelle 1 comprises a control unit 7.
- Said control unit 7 is in the form of an electronic and computer system which comprises for example a microprocessor and a working memory.
- the control unit may be in the form of a programmable automaton.
- the functions and steps described may be implemented in the form of a computer program or via hardware components (e.g. programmable gate arrays).
- control unit or its modules may be carried out by instruction sets or computer modules implemented in a processor or controller or be carried out by dedicated electronic components or components of the programmable logic circuit type (or FPGA which is the acronym for field-programmable gate array, which literally corresponds to in-situ programmable gate array) or of the application-specific integrated circuit type (or ASIC which is the acronym for application-specific integrated circuit, which literally corresponds to application-specific integrated circuit). It is also possible to combine computer parts and electronic parts. When it is specified that the unit or means or modules of said unit are configured to perform a given operation, this means that the unit comprises computer instructions and the corresponding execution means which make it possible to perform said operation and/or that the unit comprises corresponding electronic components.
- the nacelle 1 also comprises a control console 8 equipped with one or more controls 9 of the device 5 for driving the movement of the platform 4.
- the controls 9 of the device 5 for driving the movement of the platform 3 equipping the control console 8 comprise a control for moving the pendulum arm 62 and a control for moving the lifting arm 61.
- These controls 9 can take the form of a pivoting lever, also called a joystick, buttons, switches or others.
- the movement control of the pendulum arm 62 is a pivoting lever and the movement control of the lifting arm 61 is also formed by a pivoting lever.
- the chassis 2 is equipped with a ground movement drive system 15 of said chassis, and the control console 8 is equipped with at least one member 16 for controlling the ground movement drive system 15 of said chassis.
- This control member 16 of the ground movement drive system 15 of the chassis 2 is, in the example shown, formed by a pivoting lever.
- the platform 3 also comprises at least one anchoring location 10 capable of being occupied by a device 22 for anchoring safety equipment 21, such as a harness. Indeed, generally and as in the example shown, the operator 20 wears safety equipment 21 in the form of a harness.
- This harness is equipped with a lanyard whose free end is provided with a device 22 for anchoring the lanyard to the anchoring location 10.
- This anchoring device 22 may be a carabiner as in the example shown in Figure 7 .
- Anchor location 10 can affect a large number of shapes. This anchor location 10 is particularly visible at the Figure 5 and here has the form of a frame 100 delimiting an opening 101. The frame 100 is arranged at the level of the guardrail 19.
- the anchoring device 22 can thus form a closed loop around an edge of the frame.
- This frame 100 is delimited using tubes used for the production of the guardrail, itself formed by the assembly of uprights and crosspieces where each upright or crosspiece is a tube.
- the frame 100 is here formed using a tube connecting a crosspiece and an upright of the guardrail 19 to form a triangular-shaped frame. This frame has two opposite faces. Obviously, other designs of the anchoring location 10 can be envisaged without departing from the scope of the invention.
- the platform 3 also comprises a system 11 for detecting the occupied or unoccupied state of the anchoring location 10 by the anchoring device 22, and the control unit 7 is configured at least to acquire data from the detection system 11 as a function of the occupied or unoccupied state of the anchoring location 10.
- the system 11 for detecting the occupied or unoccupied state of the anchoring location 10 comprises, arranged along one face of the frame 100 formed by the anchoring location 10, a mechanical member 110 mounted to move between a position close to the anchoring location 10, corresponding to the unoccupied position of the anchoring location 10, and a position separated from the anchoring location 10 corresponding to the occupied position of the anchoring location 10, a return element 111 of said mechanical member 110 in a position close to the anchoring location 10 and a sensor 112 for determining the position of the mechanical member 110.
- the control unit 7 is configured to acquire the data provided by the sensor 112 for determining the position of the mechanical member 110.
- the mechanical member 110 is a pivoting flap extending along the frame parallel to a face of the frame. This flap pivots about an axis parallel to a face of the frame.
- the return element 111 of the mechanical member 110 is an elastically deformable element, such as a return spring, which tends to return the mechanical member 110 to a position close to the frame 100.
- the sensor 112 for determining the position of the mechanical member 110 is an inductive sensor for detecting the pivoted or non-pivoted position of the mechanical member 110.
- an anchoring device 22 such as a carabiner
- a pivoting movement of the mechanical member 110 in the direction of a separation of said mechanical member 110 from the frame.
- This movement is detected by the sensor 112 for determining the position of the mechanical member 110 and a signal is sent by said sensor 112 for determining the position of said mechanical member 110 to the control unit 7.
- the nacelle 1 also comprises a device 12 for emitting a light or sound alert signal.
- the device 12 for emitting a light or sound alert signal is a device 12 for emitting a light alert signal which comprises at least one lighting member 120, such as a light-emitting diode, arranged around at least one of the anchoring locations 10 within a radius of less than 15 cm.
- This device 12 for emitting a light or sound alert signal also comprises a light indicator 121 arranged on the control console 8 which follows the same type of display as the lighting member 120 positioned as close as possible to the anchoring location 10. Thus, the operator has these light alert signals before his eyes.
- Positioning the light alert as close as possible to the anchoring location 10 makes it possible to remind the operator 20 of the origin of the alert, namely the absence of an anchoring device 22 at the anchoring location 10.
- the nacelle 1 also comprises a system 13 for determining the position of the lifting structure 6 of the platform 3.
- the lifting structure 6 comprises a lifting arm 61 mounted so as to pivot relative to the chassis 2 between a low position and a high position
- the system 13 for determining the position of the lifting structure 6 of the platform 3 is a system for determining the position of the lifting arm 61 of said lifting structure 6.
- the system 13 for determining the position of the lifting arm 61 of the platform 2 may comprise at least one sensor 131 for the position of the lifting arm 61 and/or a sensor 132 for the position of the actuator 14 for driving the movement of the lifting arm 61 between a high position and a low position.
- this position sensor 131 may be in the form of an angular sensor.
- this sensor may be a pressure sensor housed inside the actuator 14.
- the system 13 for determining the position of the lifting structure 6 of the platform 3 may be a sensor for detecting the low position of said scissor-type structure.
- the platform 3 comprises at least one activation/inactivation member 17 for at least part of the control(s) 9 of the device 5 for driving the movement of the platform 3 equipping the control console 8.
- This activation/inactivation member 17 is mounted to move between an inactive position, in in which at least part of the control(s) 9 of the device 5 for driving the platform 3 in movement is inactive, and an active position, in which at least part of the control(s) 9 of the device 5 for driving the platform 3 in movement is active.
- active it is meant that the signals from the control(s) 9 can be taken into account by the control unit 7.
- This activation/inactivation member 17 may be a pedal or a lever equipped with at least one return member in the inactive position and configured to move from the inactive position to the active position upon the action of a thrust exerted on said activation/inactivation member 17 against said at least one return member.
- a pedal called a dead man's pedal returned to the inactive position by a spring is provided.
- a position sensor of said activation/inactivation member 17 is provided.
- the control unit 7 is configured to acquire data from the position sensor of the activation/inactivation member 17 as a function of the position of said activation/inactivation member 17.
- the operator can use the control(s) 9 of the platform drive device 5 and the signals from the control(s) 9 are received and processed by the control unit 7.
- the control unit 7 is configured to, in the unoccupied state of the anchoring location 10, control the emission of an alert signal whose intensity and/or frequency and/or tone, i.e. the color for a light alert signal or the melody for an audible alert signal, varies at least as a function of the position of the elevation structure 6.
- the control unit 7 is also configured to, in the unoccupied state of the anchoring location 10, control the emission of an alert signal whose intensity and/or frequency and/or tone, i.e. the color for a light alert signal or the melody for an audible alert signal, varies at least as a function of the position of said activation/inactivation member 17.
- the method for controlling the nacelle 1 therefore comprises, in the unoccupied state of the anchoring location 10, a step of transmitting an alert signal of which the intensity and/or the frequency and/or the tone, i.e. the color for a light alert signal or the melody for an audible alert signal, varies at least as a function of the position of the elevation structure 6.
- the lighting of the lighting device such as the light-emitting diode, constituting the light alert signal operates as follows, it being understood that the lighting of the indicator light when it is present operates in a similar manner to that of the lighting device.
- the lighting member is switched off and no light alert signal is emitted.
- the lighting member lights up and takes on, for example, a green color lit in a fixed manner.
- this action is detected via the position sensor of the activation/inactivation member 17 and the control unit 7 commands a flashing of the lighting member at a first frequency.
- This flashing may be accompanied by a change in color of the lighting member which goes from green to orange.
- the control unit commands a flashing of the lighting member at a higher frequency and possibly a change in color of the lighting member which goes from orange to red.
Landscapes
- Engineering & Computer Science (AREA)
- Structural Engineering (AREA)
- Life Sciences & Earth Sciences (AREA)
- Geology (AREA)
- Mechanical Engineering (AREA)
- Wind Motors (AREA)
- Forklifts And Lifting Vehicles (AREA)
Description
- La présente invention concerne une nacelle pour le travail en élévation, son procédé de commande, ainsi qu'un ensemble comprenant une telle nacelle.
- Elle concerne en particulier une nacelle comprenant :
- un châssis,
- une plateforme présentant un emplacement de réception d'un opérateur ,
- un dispositif d'entraînement en déplacement de la plateforme par rapport au châssis, ledit dispositif d'entraînement en déplacement de la plateforme comprenant au moins une structure d'élévation de la plateforme montée mobile au moins dans le sens d'une élévation et d'un abaissement de ladite plateforme et,
- une unité de pilotage,
- ladite plateforme comprenant une console de commande équipée d'une ou plusieurs commandes du dispositif d'entraînement en déplacement de la plateforme, au moins un emplacement d'ancrage susceptible d'être occupé par un ancrage d'un dispositif d'ancrage d'un équipement de sécurité , un système de détection de l'état occupé ou inoccupé de l'emplacement d'ancrage et un dispositif d'émission d'un signal d'alerte lumineux ou sonore, ladite unité de pilotage étant configurée au moins pour acquérir des données du système de détection en fonction de l'état occupé ou inoccupé de l'emplacement d'ancrage.
- Une telle nacelle avec un opérateur portant un harnais de sécurité équipé d'une longe terminée par un mousqueton apte à être accroché à la plateforme de la nacelle pour protéger l'opérateur d'une chute de la plateforme est connue comme l'illustre le brevet
US9245434 US 2019/152753 etUS6330931 illustrent un système de sécurité permettant l'émission d'un signal d'alerte lorsque l'opérateur n'est pas accroché correctement à la plateforme. Toutefois, il est constaté fréquemment que l'opérateur ne fixe pas le mousqueton à la plateforme. Une solution radicale peut consister à empêcher tout fonctionnement de la nacelle tant que le mousqueton n'est pas accroché à la plateforme. Toutefois, cette solution pose de nombreux problèmes et peut être potentiellement dangereuse. - Un but de l'invention est de proposer une nacelle et un ensemble comprenant une telle nacelle dont les conceptions permettent d'alerter de manière optimisée l'opérateur.
- A cet effet, l'invention a pour objet une nacelle comprenant :
- un châssis,
- une plateforme présentant une zone de réception d'un opérateur,
- un dispositif d'entraînement en déplacement de la plateforme par rapport au châssis, ledit dispositif d'entraînement en déplacement de la plateforme comprenant au moins une structure d'élévation de la plateforme montée mobile au moins dans le sens d'une élévation et d'un abaissement de ladite plateforme et,
- une unité de pilotage,
- ladite plateforme comprenant une console de commande équipée d'une ou plusieurs commandes du dispositif d'entraînement en déplacement de la plateforme, au moins un emplacement d'ancrage susceptible d'être occupé par un dispositif d'ancrage d'un équipement de sécurité, un système de détection de l'état occupé ou inoccupé de l'emplacement d'ancrage et un dispositif d'émission d'un signal d'alerte lumineux ou sonore, ladite unité de pilotage étant configurée au moins pour acquérir des données du système de détection en fonction de l'état occupé ou inoccupé de l'emplacement d'ancrage,
- Grâce au fait que l'unité de pilotage est configurée pour, à l'état inoccupé de l'emplacement d'ancrage, commander l'émission d'un signal d'alerte dont l'intensité et/ou la fréquence et/ou la tonalité, c'est-à-dire la couleur, pour un signal d'alerte lumineux, ou la mélodie, pour un signal d'alerte sonore, varie au moins en fonction de la position de la structure d'élévation, l'opérateur qui n'a pas accroché son équipement de sécurité à la plateforme peut être alerté en fonction du niveau de risque de chute de la plateforme. Cette conception permet d'alerter l'opérateur en proportion du risque encouru. En particulier, cette conception permet d'alerter plus particulièrement l'opérateur lorsqu'il commande la nacelle pour le passage de la nacelle d'une configuration dite de transport qui correspond à une position basse ou à une plage de positions basses déterminées de la structure d'élévation à une configuration dite de travail dans laquelle la plateforme de la nacelle peut être élevée à une hauteur importante.
- Selon un mode de réalisation de l'invention, la structure d'élévation comprend un bras de levage monté mobile à pivotement par rapport au châssis entre une position basse et une position haute et le système de détermination de la position de la structure d'élévation de la plateforme est un système de détermination de la position du bras de levage de ladite structure d'élévation.
- L'unité de pilotage peut donc être configurée pour, à l'état inoccupé de l'emplacement d'ancrage, commander l'émission d'un signal d'alerte dont l'intensité et/ou la fréquence et/ou la tonalité, c'est-à-dire la couleur, pour un signal d'alerte lumineux, ou la mélodie, pour un signal d'alerte sonore, varie au moins en fonction de la position du bras de levage de la structure d'élévation. L'unité de pilotage peut ainsi être configurée pour, à l'état inoccupé de l'emplacement d'ancrage, commander l'émission d'un signal d'alerte dit « fort » c'est-à-dire, dont l'intensité et/ou la fréquence et/ou la tonalité est modifiée pour pouvoir être comprise comme une augmentation du risque par l'opérateur, lorsque le bras de levage quitte la position basse. Cet éloignement du bras de levage de la position basse correspond pour un grand nombre de nacelles au passage de la nacelle de la configuration transport dans laquelle un déplacement au sol du châssis de la nacelle est possible à la configuration travail dans laquelle un tel déplacement au sol du châssis de la nacelle à une vitesse élevée n'est plus possible.
- Selon un mode de réalisation de l'invention, le dispositif d'entraînement en déplacement de la plateforme par rapport au châssis comprend au moins un actionneur, tel qu'un vérin, d'entraînement en déplacement du bras de levage et le système de détermination de la position du bras de levage de la plateforme comprend au moins un capteur de position du bras de levage et/ou un capteur de position dudit actionneur.
- Selon un mode de réalisation de l'invention, le bras de levage de la plateforme, disposé entre le châssis et la plateforme, est couplé à la plateforme par un bras pendulaire et les commandes du dispositif d'entraînement en déplacement de la plateforme équipant la console de commande comprennent au moins une commande en déplacement du bras pendulaire et une commande en déplacement du bras de levage. Il est ainsi possible lorsque la détection de la position de la structure d'élévation s'opère au niveau du bras de levage d'émettre un signal d'alerte « faible » lorsque seul le bras pendulaire est entraîné en déplacement alors que le bras de levage est toujours en position basse.
- Selon un mode de réalisation de l'invention, le châssis est équipé d'un système d'entraînement en déplacement au sol dudit châssis et la console de commande est équipée d'au moins un organe de commande du système d'entraînement en déplacement au sol dudit châssis. L'unité de pilotage est configurée pour autoriser/interdire la commande du système d'entraînement en déplacement au sol du châssis à partir de la console de commande en fonction des données fournies par le système de détermination de la position de la structure d'élévation de la plateforme.
- Selon un mode de réalisation de l'invention, la plateforme comprend au moins un organe d'activation/inactivation d'au moins une partie de la ou des commandes du dispositif d'entraînement en déplacement de la plateforme équipant la console de commande, ledit organe d'activation/inactivation étant monté mobile entre une position inactive dans laquelle au moins une partie de la ou des commandes du dispositif d'entraînement en déplacement de la plateforme est inactive et une position active dans laquelle au moins une partie de la ou des commandes du dispositif d'entraînement en déplacement de la plateforme est activée, et l'unité de pilotage est configurée, pour à l'état inoccupé de l'emplacement d'ancrage, commander l'émission d'un signal d'alerte dont l'intensité et/ou la fréquence et/ou la tonalité c'est-à-dire la couleur pour un signal d'alerte lumineux ou la mélodie pour un signal d'alerte sonore varie au moins en fonction de la position dudit organe d'activation/inactivation.
- De préférence, l'organe d'activation/inactivation est une pédale ou un levier, tel qu'une gâchette, équipé d'au moins un organe de rappel en position inactive et est configuré pour passer de la position inactive à la position active sous l'action d'une poussée exercée sur ledit organe d'activation/inactivation à l'encontre dudit au moins un organe de rappel. Cet organe d'activation/inactivation est fréquemment appelé pédale ou levier ou gâchette homme mort. A nouveau, l'activation d'un tel organe signale le souhait de l'opérateur de vouloir entraîner en déplacement le châssis ou la plateforme et permet à l'unité de pilotage de commander l'émission d'un signal d'alerte tenant compte de cette augmentation du risque de chute de la plateforme.
- Selon un mode de réalisation de l'invention, la plateforme comprend un plancher et un garde-corps entourant au moins une partie du plancher et le ou au moins l'un des emplacements d'ancrage a la forme d'un cadre délimitant une ouverture, ledit cadre étant ménagé au niveau du garde-corps. Dans le cas d'un dispositif d'ancrage de l'équipement de sécurité à la plateforme formé par un mousqueton, il suffit au mousqueton d'entourer un bord du cadre pour être fixé au cadre. Il en résulte une simplicité de mise en œuvre.
- Selon un mode de réalisation de l'invention, le système de détection de l'état occupé ou inoccupé de l'emplacement d'ancrage comprend, disposé le long d'une face du cadre formé par l'emplacement d'ancrage, un organe mécanique monté mobile entre une position rapprochée de l'emplacement d'ancrage correspondant à la position inoccupée de l'emplacement d'ancrage et une position écartée de l'emplacement d'ancrage correspondant à la position occupée de l'emplacement d'ancrage, un élément de rappel dudit organe mécanique en position rapprochée de l'emplacement d'ancrage et un capteur de détermination de la position dudit organe mécanique et l'unité de pilotage est configurée pour acquérir les données fournies par ledit capteur de détermination de la position dudit organe mécanique.
- Selon un mode de réalisation de l'invention, le dispositif d'émission d'un signal d'alerte lumineux ou sonore comprend au moins un organe d'éclairage, tel qu'une diode électroluminescente, disposé autour du ou d'au moins l'un des emplacements d'ancrage dans un rayon inférieur à 15 cm. C'est au moins au niveau de cet organe d'éclairage que le signal d'alerte lumineux est émis. Cette disposition permet d'orienter l'œil de l'opérateur en direction de l'emplacement d'ancrage pour lui rappeler qu'il n'a pas accroché son équipement de sécurité à la plateforme.
- Selon un mode de réalisation de l'invention, le dispositif d'émission d'un signal d'alerte lumineux ou sonore comprend un témoin lumineux disposé sur la console de commande. C'est au moins au niveau de ce témoin lumineux que le signal d'alerte lumineux peut être émis. Cette redondance du signal d'alerte permet d'éviter une absence de visualisation du signal d'alerte lumineux par l'opérateur.
- L'invention a encore pour objet, un ensemble comprenant une nacelle et un équipement de sécurité, tel qu'un harnais, équipé d'un dispositif d'ancrage, tel qu'un mousqueton, ladite nacelle comprenant :
- un châssis,
- une plateforme présentant une zone de réception d'un opérateur,
- un dispositif d'entraînement en déplacement de la plateforme par rapport au châssis, ledit dispositif d'entraînement en déplacement de la plateforme comprenant au moins une structure d'élévation de la plateforme montée mobile au moins dans le sens d'une élévation et d'un abaissement de la plateforme et,
- une unité de pilotage,
- ladite plateforme comprenant une console de commande équipée d'une ou plusieurs commandes du dispositif d'entraînement en déplacement de la plateforme, au moins un emplacement d'ancrage pour permettre l'ancrage du dispositif d'ancrage de l'équipement de sécurité, un système de détection de l'état occupé ou inoccupé de l'emplacement d'ancrage par ledit dispositif d'ancrage et un dispositif d'émission d'un signal d'alerte lumineux ou sonore, ladite unité de pilotage étant configurée au moins pour acquérir des données du système de détection en fonction de l'état occupé ou inoccupé de l'emplacement d'ancrage,
- L'invention a encore pour objet, un procédé de commande d'une nacelle comprenant :
- un châssis,
- une plateforme présentant une zone de réception d'un opérateur,
- un dispositif d'entraînement en déplacement de la plateforme par rapport au châssis, ledit dispositif d'entraînement en déplacement de la plateforme comprenant au moins une structure d'élévation de la plateforme montée mobile au moins dans le sens d'une élévation et d'un abaissement de ladite plateforme et,
- une unité de pilotage,
- ladite plateforme comprenant une console de commande équipée d'une ou plusieurs commandes du dispositif d'entraînement en déplacement de la plateforme, au moins un emplacement d'ancrage pour permettre un ancrage d'un dispositif d'ancrage d'un équipement de sécurité, un système de détection de l'état occupé ou inoccupé de l'emplacement d'ancrage par ledit dispositif d'ancrage et un dispositif d'émission d'un signal d'alerte lumineux ou sonore et ladite unité de pilotage étant configurée au moins pour acquérir des données du système de détection en fonction de l'état occupé ou inoccupé de l'emplacement d'ancrage,
- L'invention sera bien comprise à la lecture de la description suivante d'exemples de réalisation, en référence aux dessins annexés dans lesquels :
- [
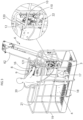
Fig. 1 ] représente une vue en perspective d'une nacelle conforme à l'invention ; - [
Fig. 2 ] représente une vue en perspective d'une nacelle conforme à l'invention ; - [
Fig. 3 ] représente une vue partielle en perspective d'une nacelle conforme à l'invention avec une vue de détail de l'emplacement d'ancrage du dispositif d'ancrage de l'équipement de sécurité ; - [
Fig. 4 ] représente une vue en perspective d'une nacelle conforme à l'invention prise au niveau de la console de commande ; - [
Fig. 5 ] représente une vue partielle en perspective d'une nacelle conforme à l'invention prise au niveau de l'emplacement d'ancrage ; - [
Fig. 6 ] représente une vue partielle en perspective d'une nacelle conforme à l'invention prise au niveau du système de détection de l'état occupé ou inoccupé de l'emplacement d'ancrage, l'emplacement d'ancrage étant à l'état inoccupé ; - [
Fig. 7 ] représente une vue partielle en perspective d'une nacelle conforme à l'invention prise au niveau du système de détection de l'état occupé ou inoccupé de l'emplacement d'ancrage, l'emplacement d'ancrage étant à l'état occupé. - Comme mentionné ci-dessus, l'invention a pour objet une nacelle 1 permettant le travail en élévation de personne ainsi qu'un ensemble comprenant une telle nacelle 1 et un équipement 21 de sécurité équipé d'un dispositif 22 d'ancrage qui sera décrit ci-après. Cette nacelle 1 comprend un châssis 2. Ce châssis 2 est de préférence un châssis 2 automoteur, c'est-à-dire motorisé, équipé d'un système moteur d'entraînement en déplacement au sol 15 du châssis 2.
- Dans l'exemple représenté, le châssis 2 est un châssis 2 roulant dont au moins certaines des roues sont motrices. Dans l'exemple représenté, le châssis 2 est équipé de quatre roues. À la place des roues, le châssis 2 pourrait être équipé de chenilles ou d'autres organes d'entraînement en déplacement au sol du châssis 2, sans sortir du cadre de l'invention.
- Le système d'entraînement en déplacement au sol 15 du châssis 2 comprend donc un ou plusieurs moteurs. Ainsi, comme mentionné ci-dessus une ou plusieurs roues du châssis 2 sont des roues motrices.
- Dans l'exemple représenté, les roues motrices sont des roues reliées à un moteur électrique intégré au châssis 2. De même, certaines roues sont des roues directrices, présentant une orientation variable par rapport au châssis 2, pour permettre de diriger la nacelle 1.
- Le ou les moteurs électriques peuvent être remplacés par un moteur thermique relié aux roues par l'intermédiaire d'une transmission, de préférence hydrostatique, qui peut comprendre une pompe hydrostatique et les moteurs hydrauliques associés chacun à une roue dite motrice.
- Le détail de cette transmission ne sera pas décrit en détail, car une telle transmission est bien connue à ceux versés dans cet art.
- De même, le système d'entraînement en déplacement au sol 15 du châssis 2 ne sera pas décrit en détail, car il est bien connu à ceux versés dans cet art.
- La nacelle 1 comprend également une plateforme 3 présentant une zone 4 de réception d'un opérateur.
- Cette plateforme 3 de travail est ici formée d'un plancher 18 et d'un garde-corps 19 entourant le plancher tout en autorisant l'accès à l'intérieur de ladite plateforme 3.
- L'opérateur 20 est généralement debout à l'intérieur de la zone 4 de réception de l'opérateur de la plateforme 3.
- La nacelle 1 comprend encore un dispositif 5 d'entraînement en déplacement de la plateforme 3 par rapport au châssis 2 disposé au moins partiellement entre le châssis 2 et la plateforme 3.
- Ce dispositif 5 d'entraînement en déplacement de la plateforme 3 peut affecter un grand nombre de formes.
- Ce dispositif 5 d'entraînement en déplacement de la plateforme 3 comprend au moins une structure 6 d'élévation de la plateforme 3 montée mobile au moins dans le sens d'une élévation et d'un abaissement de ladite plateforme 3.
- Dans l'exemple représenté, la structure 6 d'élévation comprend un bras 61 de levage monté mobile à pivotement par rapport au châssis 2 entre une position basse et une position haute.
- L'axe pivot du bras 61 de levage s'étend à l'horizontale à l'état positionné de la nacelle 1 sur un plan support horizontal.
- La plateforme 3 peut être disposée directement à l'extrémité de ce bras 61 de levage. En variante, et comme représenté à la
figure 1 , le bras 61 de levage de la plateforme 3, disposé entre le châssis 2 et la plateforme 3, est couplé à la plateforme 3 par un bras pendulaire 62. - Dans le cas d'une structure 6 d'élévation comprenant un bras 61 de levage, le dispositif 5 d'entraînement en déplacement de la plateforme 3 par rapport au châssis 2 comprend au moins un actionneur 14, tel qu'un vérin, d'entraînement en déplacement du bras 61 de levage entre une position haute et une position basse.
- Dans les exemples représentés, un premier actionneur 14 est disposé entre le châssis 2 et le bras 61 de levage. Un deuxième actionneur est disposé entre le bras 61 de levage et le bras pendulaire 62. Un troisième actionneur peut encore être prévu entre la plateforme 3 et le bras pendulaire 62 lorsqu'il est présent ou entre le bras 61 de levage et la plateforme 3.
- En variante, et de manière non représentée, la structure 6 d'élévation peut comprendre un ou plusieurs ciseaux superposés, deux des extrémités du ciseau, ou du ciseau le plus au-dessus dans le cas d'une superposition de ciseaux, sont reliées à la plateforme.
- A nouveau, un ou plusieurs actionneurs permettent un déplacement d'une telle structure 6 d'élévation montée mobile entre une position basse repliée des ciseaux et une position haute déployée des ciseaux.
- Le détail de ce dispositif 5 d'entraînement en déplacement de la plateforme 3 ne sera pas décrit plus en détail car il est bien connu à ceux versés dans cet art.
- La nacelle 1 comprend une unité 7 de pilotage. Ladite unité 7 de pilotage se présente sous la forme d'un système électronique et informatique qui comprend par exemple un microprocesseur et une mémoire de travail. Selon un aspect particulier, l'unité de pilotage peut se présenter sous la forme d'un automate programmable. Autrement dit, les fonctions et étapes décrites peuvent être mise en œuvre sous forme de programme informatique ou via des composants matériels (p. ex. des réseaux de portes programmables). En particulier, les fonctions et étapes opérées par l'unité de pilotage ou ses modules peuvent être réalisées par des jeux d'instructions ou modules informatiques implémentés dans un processeur ou contrôleur ou être réalisées par des composants électroniques dédiés ou des composants de type circuit logique programmable (ou FPGA qui est l'acronyme de l'anglais field-programmable gate array, ce qui correspond littéralement à réseau de portes programmable in-situ) ou de type circuit intégré propre à une application (ou ASIC qui est l'acronyme de l'anglais application-specific integrated circuit, ce qui correspond littéralement à circuit intégré spécifique à une application). Il est aussi possible de combiner des parties informatiques et des parties électroniques. Lorsqu'il est précisé que l'unité ou des moyens ou modules de ladite unité sont configurés pour réaliser une opération donnée, cela signifie que l'unité comprend des instructions informatiques et les moyens d'exécution correspondants qui permettent de réaliser ladite opération et/ou que l'unité comprend des composants électroniques correspondants.
- La nacelle 1 comprend encore une console 8 de commande équipée d'une ou plusieurs commandes 9 du dispositif 5 d'entraînement en déplacement de la plateforme 4.
- Dans l'exemple représenté, les commandes 9 du dispositif 5 d'entraînement en déplacement de la plateforme 3 équipant la console 8 de commande comprennent une commande en déplacement du bras pendulaire 62 et une commande en déplacement du bras 61 de levage. Ces commandes 9 peuvent prendre indifféremment la forme de levier pivotant, encore appelé joystick, de boutons, d'interrupteurs ou autres.
- Dans l'exemple représenté, la commande en déplacement du bras pendulaire 62 est un levier pivotant et la commande en déplacement du bras 61 de levage est également formée par un levier pivotant.
- Le châssis 2 est équipé d'un système d'entraînement en déplacement au sol 15 dudit châssis, et la console 8 de commande est équipée d'au moins un organe 16 de commande du système d'entraînement en déplacement au sol 15 dudit châssis.
- Cet organe 16 de commande du système d'entraînement en déplacement au sol 15 du châssis 2 est, dans l'exemple représenté, formé par un levier pivotant.
- La plateforme 3 comprend encore au moins un emplacement 10 d'ancrage susceptible d'être occupé par un dispositif 22 d'ancrage d'un équipement 21 de sécurité, tel qu'un harnais. En effet, généralement et comme dans l'exemple représenté, l'opérateur 20 porte un équipement 21 de sécurité se présentant sous forme d'un harnais. Ce harnais est équipé d'une longe dont l'extrémité libre est pourvue d'un dispositif 22 d'ancrage de la longe à l'emplacement 10 d'ancrage. Ce dispositif 22 d'ancrage peut être un mousqueton comme dans l'exemple représenté à la
figure 7 . - L'emplacement 10 d'ancrage peut affecter un grand nombre de forme. Cet emplacement 10 d'ancrage est particulièrement visible à la
figure 5 et a ici la forme d'un cadre 100 délimitant une ouverture 101. Le cadre 100 est ménagé au niveau du garde-corps 19. - Le dispositif 22 d'ancrage peut ainsi former une boucle fermée autour d'un bord du cadre. Ce cadre 100 est délimité à l'aide de tubes utilisés pour la réalisation du garde-corps, lui-même formé par l'assemblage de montants et de traverses où chaque montant ou traverse est un tube.
- Le cadre 100 est ici formé à l'aide d'un tube reliant une traverse et un montant du garde-corps 19 pour former un cadre de forme triangulaire. Ce cadre présente deux faces opposées. Bien évidemment, d'autres conceptions de l'emplacement 10 d'ancrage peuvent être envisagées sans sortir du cadre de l'invention.
- La plateforme 3 comprend encore un système de détection 11 de l'état occupé ou inoccupé de l'emplacement 10 d'ancrage par le dispositif 22 d'ancrage, et l'unité 7 de pilotage est configurée au moins pour acquérir des données du système de détection 11 en fonction de l'état occupé ou inoccupé de l'emplacement 10 d'ancrage.
- Le système de détection 11 de l'état occupé ou inoccupé de l'emplacement 10 d'ancrage comprend, disposé le long d'une face du cadre 100 formé par l'emplacement 10 d'ancrage, un organe mécanique 110 monté mobile entre une position rapprochée de l'emplacement 10 d'ancrage, correspondant à la position inoccupée de l'emplacement 10 d'ancrage, et une position écartée de l'emplacement 10 d'ancrage correspondant à la position occupée de l'emplacement 10 d'ancrage, un élément de rappel 111 dudit organe mécanique 110 en position rapprochée de l'emplacement 10 d'ancrage et un capteur 112 de détermination de la position de l'organe mécanique 110. L'unité 7 de pilotage est configurée pour acquérir les données fournies par le capteur 112 de détermination de la position de l'organe mécanique 110.
- En particulier, dans l'exemple représenté aux
figures 6 et7 , l'organe mécanique 110 est un volet pivotant s'étendant le long du cadre parallèlement à une face du cadre. Ce volet pivote autour d'un axe parallèle à une face du cadre. L'élément de rappel 111 de l'organe mécanique 110 est un élément élastiquement déformable, tel qu'un ressort de rappel, qui tend à rappeler l'organe mécanique 110 en position rapprochée du cadre 100. Le capteur 112 de détermination de la position de l'organe mécanique 110 est un capteur inductif de détection de la position pivotée ou non de l'organe mécanique 110. - Ainsi, lorsqu'un dispositif 22 d'ancrage, tel qu'un mousqueton, est introduit dans le cadre 100, il entraîne un déplacement à pivotement de l'organe mécanique 110 dans le sens d'un écartement dudit organe mécanique 110 du cadre. Ce mouvement est détecté par le capteur 112 de détermination de la position de l'organe mécanique 110 et un signal est adressé par ledit capteur 112 de détermination de la position dudit organe mécanique 110 à l'unité 7 de pilotage.
- La nacelle 1 comprend également un dispositif d'émission 12 d'un signal d'alerte lumineux ou sonore. Dans les exemples représentés, le dispositif d'émission 12 d'un signal d'alerte lumineux ou sonore est un dispositif d'émission 12 d'un signal d'alerte lumineux qui comprend au moins un organe 120 d'éclairage, tel qu'une diode électroluminescente, disposé autour d'au moins l'un des emplacements 10 d'ancrage dans un rayon inférieur à 15 cm.
- Ce dispositif d'émission 12 d'un signal d'alerte lumineux ou sonore comprend encore un témoin lumineux 121 disposé sur la console 8 de commande qui suit le même type d'affichage que l'organe 120 d'éclairage positionné au plus près de l'emplacement 10 d'ancrage. Ainsi, l'opérateur a sous les yeux ces signaux d'alerte lumineux.
- Le positionnement d'alerte lumineux au plus près de l'emplacement 10 d'ancrage permet de rappeler à l'opérateur 20 l'origine de l'alerte, à savoir l'absence de dispositif 22 d'ancrage au niveau de l'emplacement 10 d'ancrage.
- La nacelle 1 comprend encore un système 13 de détermination de la position de la structure 6 d'élévation de la plateforme 3. Dans le cas où la structure 6 d'élévation comprend un bras 61 de levage monté mobile à pivotement par rapport au châssis 2 entre une position basse et une position haute, le système 13 de détermination de la position de la structure 6 d'élévation de la plateforme 3 est un système de détermination de la position du bras 61 de levage de ladite structure 6 d'élévation.
- Ainsi, le système 13 de détermination de la position du bras 61 de levage de la plateforme 2 peut comprendre au moins un capteur 131 de position de bras 61 de levage et/ou un capteur 132 de position de l'actionneur 14 d'entraînement en déplacement du bras 61 de levage entre une position haute et une position basse.
- Dans le cas d'un capteur 131 de position du bras 61 de levage, ce capteur 131 de position peut se présenter sous forme d'un capteur angulaire. Dans le cas d'un capteur 132 de position de l'actionneur, ce capteur peut être un capteur de pression logé à l'intérieur de l'actionneur 14. Dans le cas où la structure d'élévation est une structure de type ciseau, le système 13 de détermination de la position de la structure 6 d'élévation de la plateforme 3 peut être un capteur de détection de la position basse de ladite structure de type ciseau.
- Enfin, généralement pour des raisons de sécurité, la plateforme 3 comprend au moins un organe d'activation/inactivation 17 d'au moins d'une partie de la ou des commandes 9 du dispositif 5 d'entraînement en déplacement de la plateforme 3 équipant la console 8 de commande. Cet organe d'activation/inactivation 17 est monté mobile entre une position inactive, dans laquelle au moins une partie de la ou des commandes 9 du dispositif 5 d'entraînement en déplacement de la plateforme 3 est inactive, et une position active, dans laquelle au moins une partie de la ou des commandes 9 du dispositif 5 d'entraînement en déplacement de la plateforme 3 est active. Par active, on entend que les signaux de la ou des commandes 9 peuvent être pris en compte par l'unité 7 de pilotage.
- Cet organe d'activation/inactivation 17 peut être une pédale ou un levier équipé d'au moins un organe de rappel en position inactive et configuré pour passer de la position inactive à la position active sur l'action d'une poussée exercée sur ledit organe d'activation/inactivation 17 à l'encontre dudit au moins organe de rappel.
- Dans l'exemple représenté aux figures, c'est une pédale dite pédale homme mort rappelée en position inactive par un ressort qui est prévu. Un capteur de position dudit organe d'activation/inactivation 17 est prévu. L'unité 7 de pilotage est configurée pour acquérir des données du capteur de position de l'organe d'activation/inactivation 17 en fonction de la position dudit organe d'activation/inactivation 17. A l'état positionné de l'organe d'activation/inactivation 17 en position active, l'opérateur peut utiliser la ou les commandes 9 du dispositif 5 d'entraînement de la plateforme et les signaux de la ou des commandes 9 sont reçus et traités par l'unité 7 de pilotage.
- L'unité 7 de pilotage est configurée pour, à l'état inoccupé de l'emplacement 10 d'ancrage, commander l'émission d'un signal d'alerte dont l'intensité et/ou la fréquence et/ou la tonalité, c'est-à-dire la couleur pour un signal d'alerte lumineux ou la mélodie pour un signal d'alerte sonore, varie au moins en fonction de la position de la structure 6 d'élévation.
- L'unité 7 de pilotage est également configurée pour, à l'état inoccupé de l'emplacement 10 d'ancrage, commander l'émission d'un signal d'alerte dont l'intensité et/ou la fréquence et/ou la tonalité, c'est-à-dire la couleur pour un signal d'alerte lumineux ou la mélodie pour un signal d'alerte sonore, varie au moins en fonction de la position dudit organe d'activation/inactivation 17.
- Le procédé de commande de la nacelle 1 comprend donc, à l'état inoccupé de l'emplacement 10 d'ancrage, une étape d'émission d'un signal d'alerte dont l'intensité et/ou la fréquence et/ou la tonalité, c'est-à-dire la couleur pour un signal d'alerte lumineux ou la mélodie pour un signal d'alerte sonore, varie au moins en fonction de la position de la structure 6 d'élévation.
- En pratique, l'éclairage de l'organe d'éclairage, tel que la diode électroluminescente, constitutif du signal d'alerte lumineux s'opèrent tel que suit étant entendu que l'éclairage du témoin lumineux lorsqu'il est présent s'opère de manière similaire à celui de l'organe d'éclairage.
- Lorsque l'emplacement 10 d'ancrage est occupé par le dispositif 22 d'ancrage, l'organe d'éclairage est éteint et aucun signal d'alerte lumineux est émis.
- Lorsque l'emplacement 10 d'ancrage n'est pas occupé par le dispositif 22 d'ancrage et qu'un opérateur 20 est sur la plateforme 3 et a démarré la nacelle 1, l'organe d'éclairage s'allume et prend, par exemple, une couleur verte allumée de manière fixe.
- Dès que l'opérateur agit sur l'organe d'activation/inactivation 17 d'au moins une partie des commandes 9 du dispositif 5 d'entraînement en déplacement de la plateforme 3, cette action est détectée via le capteur de position de l'organe d'activation/inactivation 17 et l'unité 7 de pilotage commande un clignotement de l'organe d'éclairage à une première fréquence. Ce clignotement peut s'accompagner d'un changement de couleur de l'organe d'éclairage qui passe du vert à l'orange.
- Dès que l'opérateur 20 commande un levage du bras 61 de levage, ce levage est détecté par le système 13 de détermination de la position de la structure 6 d'élévation. L'unité de pilotage commande un clignotement de l'organe d'éclairage à une fréquence supérieure et éventuellement un changement de couleur de l'organe d'éclairage qui passe de l'orange au rouge.
- Ainsi, l'opérateur peut de manière très simple être alerté en fonction du risque de chute encouru et le signal d'alerte lumineux peut varier en fonction dudit risque.
Claims (12)
- Nacelle (1) comprenant :- un châssis (2),- une plateforme (3) présentant une zone de réception d'un opérateur (20),- un dispositif (5) d'entraînement en déplacement de la plateforme (3) par rapport au châssis (2), ledit dispositif (5) d'entraînement en déplacement de la plateforme (3) comprenant au moins une structure (6) d'élévation de la plateforme (3) montée mobile au moins dans le sens d'une élévation et d'un abaissement de ladite plateforme (3) et,- une unité (7) de pilotage,- ladite plateforme (3) comprenant une console (8) de commande équipée d'une ou plusieurs commandes (9) du dispositif (5) d'entraînement en déplacement de la plateforme (3), au moins un emplacement (10) d'ancrage susceptible d'être occupé par un dispositif (22) d'ancrage d'un équipement (21) de sécurité, un système de détection (11) de l'état occupé ou inoccupé de l'emplacement (10) d'ancrage et un dispositif d'émission (12) d'un signal d'alerte lumineux ou sonore, ladite unité (7) de pilotage étant configurée au moins pour acquérir des données du système de détection (11) en fonction de l'état occupé ou inoccupé de l'emplacement (10) d'ancrage, la nacelle (1) comprenant un système (13) de détermination de la position de la structure (6) d'élévation de la plateforme (3), caractérisé en ce que l'unité (7) de pilotage est configurée pour commander le dispositif d'émission (12) d'un signal d'alerte au moins en fonction de l'état occupé ou inoccupé de l'emplacement (10) d'ancrage et de la position de la structure (6) d'élévation, ladite unité (7) de pilotage étant configurée pour, à l'état inoccupé de l'emplacement (10) d'ancrage, commander l'émission d'un signal d'alerte dont l'intensité et/ou la fréquence et/ou la tonalité, c'est-à-dire la couleur pour un signal d'alerte lumineux, ou la mélodie pour un signal d'alerte sonore, varie au moins en fonction de la position de la structure (6) d'élévation.
- Nacelle (1) selon la revendication 1, caractérisée en ce que la structure (6) d'élévation comprend un bras (61) de levage monté mobile à pivotement par rapport au châssis (2) entre une position basse et une position haute et en ce que le système (13) de détermination de la position de la structure (6) d'élévation de la plateforme (3) est un système de détermination de la position du bras (61) de levage de ladite structure (6) d'élévation.
- Nacelle (1) selon la revendication 2, caractérisée en ce que le dispositif (5) d'entraînement en déplacement de la plateforme (3) par rapport au châssis (2) comprend au moins un actionneur (14), tel qu'un vérin, d'entraînement en déplacement du bras (61) de levage et en ce que le système (13) de détermination de la position du bras (61) de levage de la plateforme (3) comprend au moins un capteur (131) de position du bras (61) de levage et/ou un capteur (132) de position dudit actionneur (14).
- Nacelle (1) selon l'une des revendications 2 ou 3, caractérisée en ce que le bras (61) de levage de la plateforme (3), disposé entre le châssis (2) et la plateforme (3), est couplé à la plateforme (3) par un bras pendulaire (62) et en ce que les commandes (9) du dispositif (5) d'entraînement en déplacement de la plateforme (3) équipant la console (8) de commande comprennent au moins une commande en déplacement du bras pendulaire (62) et une commande en déplacement du bras (61) de levage.
- Nacelle (1) selon l'une des revendications 1 à 4, caractérisée en ce que le châssis (2) est équipé d'un système d'entraînement en déplacement au sol (15) dudit châssis (2) et en ce que la console (8) de commande est équipée d'au moins un organe (16) de commande du système d'entraînement en déplacement au sol (15) dudit châssis (2).
- Nacelle (1) selon l'une des revendications 1 à 5, caractérisée en ce que la plateforme (3) comprend au moins un organe d'activation/inactivation (17) d'au moins une partie de la ou des commandes (9) du dispositif (5) d'entraînement en déplacement de la plateforme (3) équipant la console (8) de commande, ledit organe d'activation/inactivation (17) étant monté mobile entre une position inactive dans laquelle au moins une partie de la ou des commandes (9) du dispositif (5) d'entraînement en déplacement de la plateforme (3) est inactive et une position active dans laquelle au moins une partie de la ou des commandes (9) du dispositif (5) d'entraînement en déplacement de la plateforme (3) est activée, et en ce que l'unité (7) de pilotage est configurée, pour à l'état inoccupé de l'emplacement (10) d'ancrage, commander l'émission d'un signal d'alerte dont l'intensité et/ou la fréquence et/ou la tonalité c'est-à-dire la couleur pour un signal d'alerte lumineux ou la mélodie pour un signal d'alerte sonore varie au moins en fonction de la position dudit organe d'activation/inactivation (17).
- Nacelle (1) selon l'une des revendications 1 à 6, caractérisée en ce que la plateforme (3) comprend un plancher (18) et un garde-corps (19) entourant au moins une partie du plancher (18) et en ce que le ou au moins l'un des emplacements (10) d'ancrage a la forme d'un cadre (100) délimitant une ouverture (101), ledit cadre (100) étant ménagé au niveau du garde-corps (19).
- Nacelle (1) selon la revendication 7, caractérisée en ce que le système de détection (11) de l'état occupé ou inoccupé de l'emplacement (10) d'ancrage comprend, disposé le long d'une face du cadre (100) formé par l'emplacement (10) d'ancrage, un organe mécanique (110) monté mobile entre une position rapprochée de l'emplacement (10) d'ancrage correspondant à la position inoccupée de l'emplacement (10) d'ancrage et une position écartée de l'emplacement (10) d'ancrage correspondant à la position occupée de l'emplacement (10) d'ancrage, un élément de rappel (111) dudit organe mécanique (110) en position rapprochée de l'emplacement (10) d'ancrage et un capteur (112) de détermination de la position dudit organe mécanique (110) et en ce que l'unité (7) de pilotage est configurée pour acquérir les données fournies par ledit capteur (112) de détermination de la position dudit organe mécanique (110).
- Nacelle (1) selon l'une des revendications 1 à 8, caractérisée en ce que le dispositif d'émission (12) d'un signal d'alerte lumineux ou sonore comprend au moins un organe (120) d'éclairage, tel qu'une diode électroluminescente, disposé autour du ou d'au moins l'un des emplacements (10) d'ancrage dans un rayon inférieur à 15.
- Nacelle (1) selon l'une des revendications 1 à 9, caractérisée en ce que le dispositif d'émission (12) d'un signal d'alerte lumineux ou sonore comprend un témoin lumineux (121) disposé sur la console (8) de commande.
- Ensemble comprenant une nacelle (1) et un équipement (21) de sécurité, tel qu'un harnais, équipé d'un dispositif (22) d'ancrage, tel qu'un mousqueton, ladite nacelle (1) comprenant :- un châssis (2),- une plateforme (3) présentant une zone (4) de réception d'un opérateur (20),- un dispositif (5) d'entraînement en déplacement de la plateforme (3) par rapport au châssis (2), ledit dispositif (5) d'entraînement en déplacement de la plateforme (3) comprenant au moins une structure (6) d'élévation de la plateforme (3) montée mobile au moins dans le sens d'une élévation et d'un abaissement de la plateforme (3) et,- une unité (7) de pilotage,- ladite plateforme (3) comprenant une console (8) de commande équipée d'une ou plusieurs commandes (9) du dispositif (5) d'entraînement en déplacement de la plateforme (3), au moins un emplacement (10) d'ancrage pour permettre l'ancrage du dispositif (22) d'ancrage de l'équipement (21) de sécurité, un système de détection (11) de l'état occupé ou inoccupé de l'emplacement (10) d'ancrage par ledit dispositif (22) d'ancrage et un dispositif d'émission (12) d'un signal d'alerte lumineux ou sonore, ladite unité (7) de pilotage étant configurée au moins pour acquérir des données du système de détection (11) en fonction de l'état occupé ou inoccupé de l'emplacement (10) d'ancrage,caractérisé en ce que la nacelle (1), qui est conforme à l'une des revendications 1 à 10, comprend un système (13) de détermination de la position de la structure (6) d'élévation de la plateforme (3), en ce que l'unité (7) de pilotage est configurée pour commander le dispositif d'émission (12) d'un signal d'alerte au moins en fonction de l'état occupé ou inoccupé de l'emplacement (10) d'ancrage et de la position de la structure (6) d'élévation, ladite unité (7) de pilotage étant configurée pour, à l'état inoccupé de l'emplacement (10) d'ancrage, commander l'émission d'un signal d'alerte dont l'intensité et/ou la fréquence et/ou la tonalité, c'est-à-dire la couleur pour un signal d'alerte lumineux, ou la mélodie pour un signal d'alerte sonore, varie au moins en fonction de la position de la structure (6) d'élévation.
- Procédé de commande d'une nacelle (1) comprenant :- un châssis (2),- une plateforme (3) présentant une zone (4) de réception d'un opérateur (20),- un dispositif (5) d'entraînement en déplacement de la plateforme (3) par rapport au châssis (2), ledit dispositif (5) d'entraînement en déplacement de la plateforme (3) comprenant au moins une structure (6) d'élévation de la plateforme (3) montée mobile au moins dans le sens d'une élévation et d'un abaissement de ladite plateforme (3) et,- une unité (7) de pilotage,- ladite plateforme (3) comprenant une console (8) de commande équipée d'une ou plusieurs commandes (9) du dispositif (5) d'entraînement en déplacement de la plateforme (3), au moins un emplacement (10) d'ancrage pour permettre un ancrage d'un dispositif d'ancrage d'un équipement (21) de sécurité, un système de détection (11) de l'état occupé ou inoccupé de l'emplacement (10) d'ancrage par ledit dispositif d'ancrage (22) et un dispositif d'émission (11) d'un signal d'alerte lumineux ou sonore et ladite unité de pilotage étant configurée au moins pour acquérir des données du système de détection (11) en fonction de l'état occupé ou inoccupé de l'emplacement (10) d'ancrage,la nacelle (1) comprenant un système (13) de détermination de la position de la structure (6) d'élévation de la plateforme (3), caractérisé en ce que le procédé comprend, à l'état inoccupé de l'emplacement (10) d'ancrage, une étape d'émission d'un signal d'alerte dont l'intensité et/ou la fréquence et/ou la tonalité c'est-à-dire la couleur pour un signal d'alerte lumineux ou la mélodie pour un signal d'alerte sonore varie au moins en fonction de la position de la structure (6) d'élévation.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR2109309A FR3126703B1 (fr) | 2021-09-06 | 2021-09-06 | Nacelle pour le travail en élévation, procédé de commande et ensemble comprenant une telle nacelle |
| PCT/FR2022/051651 WO2023031562A1 (fr) | 2021-09-06 | 2022-09-01 | Nacelle pour le travail en élévation, procédé de commande et ensemble comprenant une telle nacelle |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP4399174A1 EP4399174A1 (fr) | 2024-07-17 |
| EP4399174B1 true EP4399174B1 (fr) | 2025-05-14 |
Family
ID=77999208
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP22786056.6A Active EP4399174B1 (fr) | 2021-09-06 | 2022-09-01 | Nacelle pour le travail en élévation, procédé de commande et ensemble comprenant une telle nacelle |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20250083939A1 (fr) |
| EP (1) | EP4399174B1 (fr) |
| FR (1) | FR3126703B1 (fr) |
| WO (1) | WO2023031562A1 (fr) |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2000019052A1 (fr) * | 1998-09-30 | 2000-04-06 | Baillargeon Paul D | Protection anti-chute: systeme et methode |
| WO2012109444A2 (fr) * | 2011-02-09 | 2012-08-16 | Baillargeon Paul D | Système d'avertissement, de distribution de message et de journalisation utilisable pour surveillance de dispositifs antichute et de prévention, et procédé associé |
| FR3051456B1 (fr) * | 2016-05-18 | 2020-11-06 | Haulotte Group | Systeme d'aide a l'evaluation et a la gestion d'un danger sur une nacelle elevatrice |
-
2021
- 2021-09-06 FR FR2109309A patent/FR3126703B1/fr active Active
-
2022
- 2022-09-01 US US18/689,347 patent/US20250083939A1/en active Pending
- 2022-09-01 EP EP22786056.6A patent/EP4399174B1/fr active Active
- 2022-09-01 WO PCT/FR2022/051651 patent/WO2023031562A1/fr not_active Ceased
Also Published As
| Publication number | Publication date |
|---|---|
| WO2023031562A1 (fr) | 2023-03-09 |
| US20250083939A1 (en) | 2025-03-13 |
| EP4399174A1 (fr) | 2024-07-17 |
| FR3126703B1 (fr) | 2023-08-04 |
| FR3126703A1 (fr) | 2023-03-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3638614A1 (fr) | Nacelle elevatrice a placement automatique en position compacte de transport | |
| FR2836468A1 (fr) | Nacelle elevatrice a securite amelioree | |
| EP4408786B1 (fr) | Engin de manutention | |
| EP4072892B1 (fr) | Dispositif destiné à lutter contre la cinétose intégré dans un véhicule automobile | |
| EP1452479B1 (fr) | Nacelle élévatrice à ciseaux et procédé de contrôle de l'élévation et de l'abaissement de la plate-forme d'une telle nacelle | |
| EP4399174B1 (fr) | Nacelle pour le travail en élévation, procédé de commande et ensemble comprenant une telle nacelle | |
| CA3149948C (fr) | Nacelle, notamment nacelle elevatrice | |
| FR3068024A1 (fr) | Plateforme de levage avec plateforme mobile et son procede de commande | |
| WO2023180669A1 (fr) | Procédé de chargement d'une nacelle élévatrice sur une remorque ou un plateau de transport et nacelle élévatrice apte à mettre en œuvre le procédé | |
| FR2943653A1 (fr) | Dispositif de manutention de charge equipe d'un capteur de mouvement | |
| EP4444651B1 (fr) | Nacelle élévatrice pour le travail en élévation de personne | |
| WO2024105628A1 (fr) | Procédé et système de protection anti-écrasement d'un opérateur de nacelle élévatrice et nacelle élévatrice comprenant ce système | |
| EP4408787A1 (fr) | Nacelle, notamment nacelle élévatrice pour permettre le travail en élévation | |
| FR3160684A1 (fr) | Nacelle élévatrice | |
| FR3144610A1 (fr) | nacelle élévatrice pour le travail en élévation de personne | |
| EP4448438B1 (fr) | Nacelle, notamment nacelle élévatrice | |
| WO2025229285A1 (fr) | Machine de manutention equipee d'un systeme de detection de donnees d'environnement, et kit de detection correspondant | |
| FR2883534A1 (fr) | Systeme de securite pour vehicule industriel a benne basculante | |
| EP4558440A1 (fr) | Engin de manutention de charge et/ou de personne | |
| FR2499961A1 (fr) | Chariot elevateur et dispositif de commande electronique de ce chariot | |
| FR2912871A1 (fr) | Machine de coupe de vegetaux,notamment broyeur-debroussailleur |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: UNKNOWN |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE INTERNATIONAL PUBLICATION HAS BEEN MADE |
|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20240325 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| DAV | Request for validation of the european patent (deleted) | ||
| DAX | Request for extension of the european patent (deleted) | ||
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTG | Intention to grant announced |
Effective date: 20250224 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 602022014744 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: FRENCH |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: FP |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250514 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250514 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250915 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20250919 Year of fee payment: 4 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG9D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250814 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250815 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250514 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: NL Payment date: 20250918 Year of fee payment: 4 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MK05 Ref document number: 1794694 Country of ref document: AT Kind code of ref document: T Effective date: 20250514 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250514 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250514 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250514 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20250922 Year of fee payment: 4 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250814 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250914 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250514 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250514 Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250514 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20250930 Year of fee payment: 4 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250514 |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Free format text: CASE NUMBER: UPC_APP_0017296_4399174/2025 Effective date: 20251212 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250514 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250514 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 602022014744 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20250514 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: L10 Free format text: ST27 STATUS EVENT CODE: U-0-0-L10-L00 (AS PROVIDED BY THE NATIONAL OFFICE) Effective date: 20260325 |
|
| 26N | No opposition filed |
Effective date: 20260217 |