EP4545428A1 - Système automatique et procédé d'insertion de charge dans un emballage, utilisant des modules de coupe et un applicateur de colle - Google Patents
Système automatique et procédé d'insertion de charge dans un emballage, utilisant des modules de coupe et un applicateur de colle Download PDFInfo
- Publication number
- EP4545428A1 EP4545428A1 EP24192427.3A EP24192427A EP4545428A1 EP 4545428 A1 EP4545428 A1 EP 4545428A1 EP 24192427 A EP24192427 A EP 24192427A EP 4545428 A1 EP4545428 A1 EP 4545428A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- fillers
- packaging
- cutting
- boxes
- robots
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images

Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65B—MACHINES, APPARATUS OR DEVICES FOR, OR METHODS OF, PACKAGING ARTICLES OR MATERIALS; UNPACKING
- B65B41/00—Supplying or feeding container-forming sheets or wrapping material
- B65B41/02—Feeding sheets or wrapper blanks
- B65B41/04—Feeding sheets or wrapper blanks by grippers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B31—MAKING ARTICLES OF PAPER, CARDBOARD OR MATERIAL WORKED IN A MANNER ANALOGOUS TO PAPER; WORKING PAPER, CARDBOARD OR MATERIAL WORKED IN A MANNER ANALOGOUS TO PAPER
- B31D—MAKING ARTICLES OF PAPER, CARDBOARD OR MATERIAL WORKED IN A MANNER ANALOGOUS TO PAPER, NOT PROVIDED FOR IN SUBCLASSES B31B OR B31C
- B31D5/00—Multiple-step processes for making three-dimensional [3D] articles
- B31D5/0004—Multiple-step processes for making three-dimensional [3D] articles for making inserts, e.g. partitions, for boxes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65B—MACHINES, APPARATUS OR DEVICES FOR, OR METHODS OF, PACKAGING ARTICLES OR MATERIALS; UNPACKING
- B65B43/00—Forming, feeding, opening or setting-up containers or receptacles in association with packaging
- B65B43/42—Feeding or positioning bags, boxes, or cartons in the distended, opened, or set-up state; Feeding preformed rigid containers, e.g. tins, capsules, glass tubes, glasses, to the packaging position; Locating containers or receptacles at the filling position; Supporting containers or receptacles during the filling operation
- B65B43/52—Feeding or positioning bags, boxes, or cartons in the distended, opened, or set-up state; Feeding preformed rigid containers, e.g. tins, capsules, glass tubes, glasses, to the packaging position; Locating containers or receptacles at the filling position; Supporting containers or receptacles during the filling operation using roller-ways or endless conveyors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65B—MACHINES, APPARATUS OR DEVICES FOR, OR METHODS OF, PACKAGING ARTICLES OR MATERIALS; UNPACKING
- B65B43/00—Forming, feeding, opening or setting-up containers or receptacles in association with packaging
- B65B43/42—Feeding or positioning bags, boxes, or cartons in the distended, opened, or set-up state; Feeding preformed rigid containers, e.g. tins, capsules, glass tubes, glasses, to the packaging position; Locating containers or receptacles at the filling position; Supporting containers or receptacles during the filling operation
- B65B43/54—Means for supporting containers or receptacles during the filling operation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65B—MACHINES, APPARATUS OR DEVICES FOR, OR METHODS OF, PACKAGING ARTICLES OR MATERIALS; UNPACKING
- B65B55/00—Preserving, protecting or purifying packages or package contents in association with packaging
- B65B55/20—Embedding contents in shock-absorbing media, e.g. plastic foam, granular material
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65B—MACHINES, APPARATUS OR DEVICES FOR, OR METHODS OF, PACKAGING ARTICLES OR MATERIALS; UNPACKING
- B65B59/00—Arrangements to enable machines to handle articles of different sizes, to produce packages of different sizes, to vary the contents of packages, to handle different types of packaging material, or to give access for cleaning or maintenance purposes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B31—MAKING ARTICLES OF PAPER, CARDBOARD OR MATERIAL WORKED IN A MANNER ANALOGOUS TO PAPER; WORKING PAPER, CARDBOARD OR MATERIAL WORKED IN A MANNER ANALOGOUS TO PAPER
- B31B—MAKING CONTAINERS OF PAPER, CARDBOARD OR MATERIAL WORKED IN A MANNER ANALOGOUS TO PAPER
- B31B2105/00—Rigid or semi-rigid containers made by assembling separate sheets, blanks or webs
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B31—MAKING ARTICLES OF PAPER, CARDBOARD OR MATERIAL WORKED IN A MANNER ANALOGOUS TO PAPER; WORKING PAPER, CARDBOARD OR MATERIAL WORKED IN A MANNER ANALOGOUS TO PAPER
- B31B—MAKING CONTAINERS OF PAPER, CARDBOARD OR MATERIAL WORKED IN A MANNER ANALOGOUS TO PAPER
- B31B2110/00—Shape of rigid or semi-rigid containers
- B31B2110/30—Shape of rigid or semi-rigid containers having a polygonal cross section
- B31B2110/35—Shape of rigid or semi-rigid containers having a polygonal cross section rectangular, e.g. square
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B31—MAKING ARTICLES OF PAPER, CARDBOARD OR MATERIAL WORKED IN A MANNER ANALOGOUS TO PAPER; WORKING PAPER, CARDBOARD OR MATERIAL WORKED IN A MANNER ANALOGOUS TO PAPER
- B31B—MAKING CONTAINERS OF PAPER, CARDBOARD OR MATERIAL WORKED IN A MANNER ANALOGOUS TO PAPER
- B31B50/00—Making rigid or semi-rigid containers, e.g. boxes or cartons
- B31B50/02—Feeding or positioning sheets, blanks or webs
- B31B50/04—Feeding sheets or blanks
- B31B50/044—Feeding sheets or blanks involving aligning
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B31—MAKING ARTICLES OF PAPER, CARDBOARD OR MATERIAL WORKED IN A MANNER ANALOGOUS TO PAPER; WORKING PAPER, CARDBOARD OR MATERIAL WORKED IN A MANNER ANALOGOUS TO PAPER
- B31B—MAKING CONTAINERS OF PAPER, CARDBOARD OR MATERIAL WORKED IN A MANNER ANALOGOUS TO PAPER
- B31B50/00—Making rigid or semi-rigid containers, e.g. boxes or cartons
- B31B50/02—Feeding or positioning sheets, blanks or webs
- B31B50/04—Feeding sheets or blanks
- B31B50/06—Feeding sheets or blanks from stacks
- B31B50/062—Feeding sheets or blanks from stacks from the underside of a magazine
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B31—MAKING ARTICLES OF PAPER, CARDBOARD OR MATERIAL WORKED IN A MANNER ANALOGOUS TO PAPER; WORKING PAPER, CARDBOARD OR MATERIAL WORKED IN A MANNER ANALOGOUS TO PAPER
- B31B—MAKING CONTAINERS OF PAPER, CARDBOARD OR MATERIAL WORKED IN A MANNER ANALOGOUS TO PAPER
- B31B50/00—Making rigid or semi-rigid containers, e.g. boxes or cartons
- B31B50/14—Cutting, e.g. perforating, punching, slitting or trimming
- B31B50/20—Cutting sheets or blanks
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B31—MAKING ARTICLES OF PAPER, CARDBOARD OR MATERIAL WORKED IN A MANNER ANALOGOUS TO PAPER; WORKING PAPER, CARDBOARD OR MATERIAL WORKED IN A MANNER ANALOGOUS TO PAPER
- B31B—MAKING CONTAINERS OF PAPER, CARDBOARD OR MATERIAL WORKED IN A MANNER ANALOGOUS TO PAPER
- B31B50/00—Making rigid or semi-rigid containers, e.g. boxes or cartons
- B31B50/60—Uniting opposed surfaces or edges; Taping
- B31B50/62—Uniting opposed surfaces or edges; Taping by adhesives
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B31—MAKING ARTICLES OF PAPER, CARDBOARD OR MATERIAL WORKED IN A MANNER ANALOGOUS TO PAPER; WORKING PAPER, CARDBOARD OR MATERIAL WORKED IN A MANNER ANALOGOUS TO PAPER
- B31B—MAKING CONTAINERS OF PAPER, CARDBOARD OR MATERIAL WORKED IN A MANNER ANALOGOUS TO PAPER
- B31B50/00—Making rigid or semi-rigid containers, e.g. boxes or cartons
- B31B50/74—Auxiliary operations
- B31B50/81—Forming or attaching accessories, e.g. opening devices, closures or tear strings
Definitions
- the present invention relates to a system and method for carton filler insertion into packages, using an cutter and glue applicator.
- This invention is applicable in all industries where packaging of solid materials is used, particularly in furniture packaging.
- the object of the present invention is to provide a compact and efficient solution for the complex furniture packaging problem by integrating a system that combines the cutting of specific size and shape corrugated or honeycomb cartons using an oscillating knife, and precisely placing these cut cartons into packaging boxes as they move along a conveyor line.
- a document DE4232155 (A1 ) describes frame elements cut from thick cardboard with an inner honeycomb structure, which are assembled to create supporting or spacer holders. These elements can be cut using laser beams or guillotines to ensure dust-free surfaces, crucial for packing delicate items like electronics.
- a document WO2017153291 discloses a machine and method for producing packaging inserts. There is represented only a single step in the packaging process.
- a document US2019161223 discloses gripping head (15) for insert sheets (11) for inserting between rows of folding boxes (3) in a receptacle (2), characterized in that it comprises at least one first aspiration element (17a, 17b) designed to grasp an insert sheet (11),at least one second aspiration element (18a, 18b) designed to grasp an insert sheet (11),at least one linear element (19a, 19b) on which at least the first aspiration element (17a, 17b) is mounted and able to slide, a controllable actuating mechanism (20), designed to displace at least the first aspiration element (17a, 17b) by sliding on the at least one linear element (19a, 19b) into a position of grasping in which the at least one first aspiration element (17a, 17b) and the at least one second aspiration element (18a, 18b) are positioned at a spacing from each other in order to grasp an insert sheet (11).
- a controllable actuating mechanism designed to displace at least the first aspiration element (17a,
- the proposed invention is a big advantage for the industry for the following reasons: automated cutting and precise placement of carton materials, reducing manual labor and enhancing operational efficiency. It provides flexibility by cutting cartons to exact sizes on demand, minimizing material waste and logistical complexities. Compact and space-efficient, it optimizes factory layouts while improving overall packaging line performance and supporting environmentally responsible practices through efficient material usage.
- the invention concerns a system designed for the automated preparation of boxes for packaging furniture parts. It efficiently transforms solid sheets into cut fillers of required sizes using cutting modules (oscillating cutting modules, guillotine or rotating disk). Additionally, it includes a glue station to secure these fillers on the short sides of packaging boxes, managed by a robot.
- This comprehensive system eliminates manual processes, enhances operational efficiency, optimizes factory space, minimizes material wastage through on-demand cutting, and streamlines packaging logistics.
- the table is used for loading cardboard sheets, which serve as the raw material for the packaging fillers.
- the lines on the left and right sides enable continuous and efficient operation, allowing each line to function independently without interruptions.
- Linear units feed the bottom sheet from each stack to the oscillating cutting modules, ensuring precise and controlled movement for accurate alignment.
- Stepper motors automatically adjust the height and width of the cardboard sheets, ensuring correct positioning according to the size specifications of the fillers.
- Oscillating cutting modules use oscillating blades to cut the cardboard sheets into fillers of the required width, providing precise and clean cuts.
- Belt conveyors transport the cut fillers from the cutting area to the robot's working area, ensuring smooth and efficient movement and minimizing the risk of damage or misalignment.
- Robots with grippers to securely hold and manipulate the fillers enabling precise handling and placement.
- Adhesive injection unit applies a small amount of glue to the fillers, ensuring controlled application to prevent waste and ensure strong adhesion.
- the conveyor moves the boxes into the system, positioning them for filler insertion. Holding mechanisms stabilize the boxes during filler insertion, ensuring they remain steady and correctly aligned. Robots place the glued fillers into the moving boxes with high precision, ensuring they are securely attached to the short sides of the boxes.
- the entire system is mounted on wheels, allowing it to be easily transported and positioned at any location along the packaging line. This mobility provides flexibility in configuring the packaging line, enabling quick adjustments and reconfigurations to meet varying production needs.
- the filled and secured boxes continue along the conveyor for further packaging steps.
- a method for automated filler insertion into packaging comprising the steps of: Loading cardboard sheets onto a designated table, wherein said cardboard sheets serve as the raw material from which the packaging fillers will be cut.
- Positioning boxes for filler insertion wherein the boxes are moved along a belt conveyor and stabilized by holding mechanisms, ensuring the boxes remain steady and correctly aligned during the filler insertion process. Inserting the glued fillers into the moving boxes using robots, wherein the fillers are securely attached to the short sides of the boxes with high precision. Transporting the entire system mounted on wheels, allowing the system to be easily transported and positioned at any location along the packaging line, thereby providing flexibility in configuring the packaging line and enabling quick adjustments and reconfigurations to meet varying production needs. Continuing the boxes with fillers along the conveyor for further packaging steps, such as placing the production items into the box.
- This invention is applicable in the flat board furniture manufacturing industry. This is a modular solution, where different variants could be used to build fully automated packaging line, performing different tasks such as cutting and placing fillers as well as placing items into the box. Or automating packaging in other industries.
- Cardboard sheets 1, 2 are loaded onto a designated table, serving as the raw material for creating packaging fillers.
- Independent linear units 3, 4 equipped with servo motors feed the bottom sheet (first sheet) from each stack towards the cutting modules 11, 12 ( Fig. 1 ).
- These linear units 3, 4 ensure precise and controlled movement of the sheets 1, 2, aligning them correctly for the cutting process.
- Stepper motors 5, 6, 7, 8 automatically adjust the height and width of the cardboard sheets. This adjustment is crucial to position the sheets correctly according to the required dimensions of the fillers to be cut.
- the cutters transport them on a belt conveyor 9, 10 to the working area of the robots 13, 14.
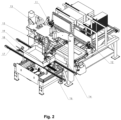
- Cutting modules 11, 12 cut the cardboard sheets into fillers of the required width ( Fig. 2 ).
- Robots 13, 14 equipped with needle grippers 15, 16 pick up the cut fillers from the conveyor 9, 10. These robots 13, 14 handle the fillers with precision and efficiency. Needle grippers 15, 16 securely grip the fillers without causing damage, facilitating precise handling during the transfer to subsequent processing stages.
- a belt conveyor 17 moves the boxes into the system.
- the robots 13, 14 move the fillers to an adhesive injection unit 20, which applies a controlled amount of adhesive to the fillers. Holding mechanisms 18, 19 stabilize the moving boxes during the insertion process, ensuring they remain steady and correctly aligned, this ensures secure attachment of the fillers inside the moving boxes.
- a belt conveyor 17 moves the boxes with fillers into the packaging system for further processing.
- a method for automated filler insertion into packaging comprising the steps of: Loading cardboard sheets 1, 2 onto a designated table, wherein said cardboard sheets 1, 2 serve as the raw material from which the packaging fillers will be cut.
- Transporting boxes for filler insertion wherein the boxes are moved along a belt conveyor 17 and stabilized by holding mechanisms 18, 19, ensuring the boxes remain steady and correctly aligned during the filler insertion process.
- the system is mounted on wheels, allowing the system to be easily transported and positioned at any location along the packaging line, thereby providing flexibility in configuring the packaging line and enabling quick adjustments and reconfigurations to meet varying production needs. When the boxes continue along the conveyor for further packaging steps.
- This invention will replace routine manual operation by human workforce, where carton filler must be inserted at the beginning of packaging line.
- Automatic system for carton filler insertion into package, using cardboard cutter and glue applicator is a modular solution, where different variants could be used to build fully automated packaging line, consisting of 10-20 variation, performing different tasks such as cutting and placing fillers as well as placing items into the box. Or automating packaging in other industries.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Making Paper Articles (AREA)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP24192427.3A EP4545428A1 (fr) | 2024-08-01 | 2024-08-01 | Système automatique et procédé d'insertion de charge dans un emballage, utilisant des modules de coupe et un applicateur de colle |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP24192427.3A EP4545428A1 (fr) | 2024-08-01 | 2024-08-01 | Système automatique et procédé d'insertion de charge dans un emballage, utilisant des modules de coupe et un applicateur de colle |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| EP4545428A1 true EP4545428A1 (fr) | 2025-04-30 |
Family
ID=92208603
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP24192427.3A Withdrawn EP4545428A1 (fr) | 2024-08-01 | 2024-08-01 | Système automatique et procédé d'insertion de charge dans un emballage, utilisant des modules de coupe et un applicateur de colle |
Country Status (1)
| Country | Link |
|---|---|
| EP (1) | EP4545428A1 (fr) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE4232155A1 (de) | 1992-09-25 | 1994-03-31 | Juergen Schmitter | Verfahren zur Herstellung einer stoßschützenden Halterung sowie Halterung hergestellt nach dem Verfahren |
| EP2360103A1 (fr) * | 2010-02-22 | 2011-08-24 | L.C.R. Macchine Automatiche S.R.L. | Flan pour une boîte en carton, et machine et procédé pour sa réalisation |
| WO2017153291A1 (fr) | 2016-03-07 | 2017-09-14 | Eksjö Development Ab | Machine et procédé pour la production d'inserts d'emballage |
| US20190161223A1 (en) | 2016-05-27 | 2019-05-30 | Bobst Mex Sa | Head for grasping and folding insert sheets, inserting device, filling station and method for grasping, folding and loading an insert sheet |
| US20210031479A1 (en) * | 2018-01-23 | 2021-02-04 | Homag Automation Gmbh | Device and method for applying a protective element to a packaging |
-
2024
- 2024-08-01 EP EP24192427.3A patent/EP4545428A1/fr not_active Withdrawn
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE4232155A1 (de) | 1992-09-25 | 1994-03-31 | Juergen Schmitter | Verfahren zur Herstellung einer stoßschützenden Halterung sowie Halterung hergestellt nach dem Verfahren |
| EP2360103A1 (fr) * | 2010-02-22 | 2011-08-24 | L.C.R. Macchine Automatiche S.R.L. | Flan pour une boîte en carton, et machine et procédé pour sa réalisation |
| WO2017153291A1 (fr) | 2016-03-07 | 2017-09-14 | Eksjö Development Ab | Machine et procédé pour la production d'inserts d'emballage |
| US20190161223A1 (en) | 2016-05-27 | 2019-05-30 | Bobst Mex Sa | Head for grasping and folding insert sheets, inserting device, filling station and method for grasping, folding and loading an insert sheet |
| US20210031479A1 (en) * | 2018-01-23 | 2021-02-04 | Homag Automation Gmbh | Device and method for applying a protective element to a packaging |
Non-Patent Citations (1)
| Title |
|---|
| HOMAG (ENGLISH): "Packaging solution with 3-side sealing and automated insertion stations", 13 May 2023 (2023-05-13), XP093248675, Retrieved from the Internet <URL:https://www.youtube.com/watch?v=9aTZs366Ols> [retrieved on 20250210] * |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11230396B2 (en) | System and method for forming boxes from cardboard blanks | |
| JP6161440B2 (ja) | 板紙用紙に溝付けする装置 | |
| US20180162083A1 (en) | Machine for automatically manufacturing customized packaging items | |
| US11530058B2 (en) | System and method for automatically closing boxes with cardboard lids | |
| CA2798513C (fr) | Methode et dispositif pliant pour la manutention de panneaux en l | |
| CN115610895B (zh) | 一种货物柔性补货方法、装置 | |
| KR102233333B1 (ko) | 판지 박스들과 같이 패키징 컨테이너들에 대해 충전하기 전에 플랩을 이격시키기 위한 디바이스 및 구비된 충전 스테이션들 | |
| EP3661849B1 (fr) | Installation pour l'emballage automatisé d'articles dans des boîtes en carton | |
| CN101152908A (zh) | 包装方法及装置 | |
| US7328545B2 (en) | Packaging line and method for continuously packaging discrete products | |
| EP2673196B1 (fr) | Appareil de scellage de contenants | |
| US9272798B2 (en) | Complete cutting station and method for separating packaging units | |
| EP4545428A1 (fr) | Système automatique et procédé d'insertion de charge dans un emballage, utilisant des modules de coupe et un applicateur de colle | |
| JP7842468B2 (ja) | 段ボール箱の成形印刷機械 | |
| CN107117345B (zh) | 自动贴背胶和保护膜装置及方法 | |
| CN212472562U (zh) | 一种上料装置及包装盒自动贴附、折叠设备 | |
| JP7108005B2 (ja) | バラ出荷物流システムに於ける自動トレー化システム | |
| CN213650039U (zh) | 自适应包装系统 | |
| CN217319474U (zh) | 一种自动化纸盒成型设备 | |
| FI20215319A1 (fi) | Laitteisto ja menetelmä vuokamaisten tuotepakkausten valmistamiseksi | |
| CN112157951A (zh) | 包装纸箱的折叠装置及纸箱折叠方法 | |
| CN223340112U (zh) | 一种用于纸板的切槽切角装置及全自动包装系统 | |
| EP4552779A1 (fr) | Machine à découper | |
| CN223948656U (zh) | 包装箱纸板生产用裁边设备 | |
| CN216782822U (zh) | 一种包装箱切边自动封胶设备 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN PUBLISHED |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC ME MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION IS DEEMED TO BE WITHDRAWN |
|
| 18D | Application deemed to be withdrawn |
Effective date: 20251031 |