EP4559865A1 - Vorrichtung zum füllen von behältern und verfahren zum betreiben der vorrichtung - Google Patents
Vorrichtung zum füllen von behältern und verfahren zum betreiben der vorrichtung Download PDFInfo
- Publication number
- EP4559865A1 EP4559865A1 EP24215228.8A EP24215228A EP4559865A1 EP 4559865 A1 EP4559865 A1 EP 4559865A1 EP 24215228 A EP24215228 A EP 24215228A EP 4559865 A1 EP4559865 A1 EP 4559865A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- filling
- lifting
- cleaning cap
- directly below
- position directly
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B67—OPENING, CLOSING OR CLEANING BOTTLES, JARS OR SIMILAR CONTAINERS; LIQUID HANDLING
- B67C—CLEANING, FILLING WITH LIQUIDS OR SEMILIQUIDS, OR EMPTYING, OF BOTTLES, JARS, CANS, CASKS, BARRELS, OR SIMILAR CONTAINERS, NOT OTHERWISE PROVIDED FOR; FUNNELS
- B67C3/00—Bottling liquids or semiliquids; Filling jars or cans with liquids or semiliquids using bottling or like apparatus; Filling casks or barrels with liquids or semiliquids
- B67C3/001—Cleaning of filling devices
- B67C3/002—Cleaning of filling devices using cups or dummies to be placed under the filling heads
- B67C3/004—Cleaning of filling devices using cups or dummies to be placed under the filling heads permanently attached to the filling machine and movable between a rest and a working position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B67—OPENING, CLOSING OR CLEANING BOTTLES, JARS OR SIMILAR CONTAINERS; LIQUID HANDLING
- B67C—CLEANING, FILLING WITH LIQUIDS OR SEMILIQUIDS, OR EMPTYING, OF BOTTLES, JARS, CANS, CASKS, BARRELS, OR SIMILAR CONTAINERS, NOT OTHERWISE PROVIDED FOR; FUNNELS
- B67C3/00—Bottling liquids or semiliquids; Filling jars or cans with liquids or semiliquids using bottling or like apparatus; Filling casks or barrels with liquids or semiliquids
- B67C3/02—Bottling liquids or semiliquids; Filling jars or cans with liquids or semiliquids using bottling or like apparatus
- B67C3/22—Details
- B67C3/24—Devices for supporting or handling bottles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B67—OPENING, CLOSING OR CLEANING BOTTLES, JARS OR SIMILAR CONTAINERS; LIQUID HANDLING
- B67C—CLEANING, FILLING WITH LIQUIDS OR SEMILIQUIDS, OR EMPTYING, OF BOTTLES, JARS, CANS, CASKS, BARRELS, OR SIMILAR CONTAINERS, NOT OTHERWISE PROVIDED FOR; FUNNELS
- B67C3/00—Bottling liquids or semiliquids; Filling jars or cans with liquids or semiliquids using bottling or like apparatus; Filling casks or barrels with liquids or semiliquids
- B67C3/001—Cleaning of filling devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B67—OPENING, CLOSING OR CLEANING BOTTLES, JARS OR SIMILAR CONTAINERS; LIQUID HANDLING
- B67C—CLEANING, FILLING WITH LIQUIDS OR SEMILIQUIDS, OR EMPTYING, OF BOTTLES, JARS, CANS, CASKS, BARRELS, OR SIMILAR CONTAINERS, NOT OTHERWISE PROVIDED FOR; FUNNELS
- B67C3/00—Bottling liquids or semiliquids; Filling jars or cans with liquids or semiliquids using bottling or like apparatus; Filling casks or barrels with liquids or semiliquids
- B67C3/02—Bottling liquids or semiliquids; Filling jars or cans with liquids or semiliquids using bottling or like apparatus
- B67C3/22—Details
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B67—OPENING, CLOSING OR CLEANING BOTTLES, JARS OR SIMILAR CONTAINERS; LIQUID HANDLING
- B67C—CLEANING, FILLING WITH LIQUIDS OR SEMILIQUIDS, OR EMPTYING, OF BOTTLES, JARS, CANS, CASKS, BARRELS, OR SIMILAR CONTAINERS, NOT OTHERWISE PROVIDED FOR; FUNNELS
- B67C3/00—Bottling liquids or semiliquids; Filling jars or cans with liquids or semiliquids using bottling or like apparatus; Filling casks or barrels with liquids or semiliquids
- B67C3/02—Bottling liquids or semiliquids; Filling jars or cans with liquids or semiliquids using bottling or like apparatus
- B67C3/22—Details
- B67C3/26—Filling-heads; Means for engaging filling-heads with bottle necks
Definitions
- the invention relates to a device for filling containers.
- the invention further relates to a method for operating a device for filling containers.
- Filling devices for filling containers have long been known in the art. It is also known from the prior art that such filling devices can be cleaned with a liquid cleaning agent as part of a cleaning mode. This cleaning agent can be supplied, for example, via the product supply line and thus clean the individual filling elements. The cleaning agent can then be returned using a so-called CIP cap (cleaning in place) or cover.
- CIP cap cleaning in place
- the DE 37 22 495 A1 discloses a filling and closing machine for containers such as bottles, cans, plastic containers, and the like, consisting of rotating support bodies for the filling valves, closing units, and the like, and base plates and lifting elements associated with these filling valves and closing units, and rinsing containers that can be attached between these and to the filling valves or closing units for collecting and redirecting the cleaning fluid circulating during the rinsing process.
- the respective rinsing containers in or on the filling and closing machine are automatically retractable from a rest position outside the movement path of the containers into a working position beneath the filling valves and closing units.
- the rinsing containers are mounted in or on the actual lifting element and can be moved in or on this from a parked position to a working position and moved by the lifting element against the filling element.
- EP 1 270 498 A1 the JP S52 047042 U , the EP 2 748 102 B1 , the EP 0 785 134 A2 , the DE 10 2006 013 367 A1 , the DE 10 2014 117 859 A1 , the DE 43 43 425 A1 and the DE 10 2011111 496 B3 pointed out.
- a disadvantage of the known state of the art can be the comparatively large installation space requirement for the system for moving the rinsing container or the cleaning cap for the filling element, especially if the filling element also has an elongated filling level probe that must be cleaned In practice, this means that when space is limited, for example due to a comparatively small pitch (e.g. 87 mm or 94 mm) of the filling stations of a rotary device, the CIP cleaning caps are sometimes still attached and removed manually.
- a pitch e.g. 87 mm or 94 mm
- the invention is based on the object of creating an improved technology for cleaning a filling element of a filling device, preferably with a particularly small installation space requirement and/or applicability to a filling element with a filling level probe.
- the device comprises (at least) one filling element for filling a container.
- the device further comprises (at least) one container carrier, preferably a container support plate, for supporting the container (e.g., at the bottom) during filling of the container.
- the device further comprises (at least) one (e.g., tubular) cleaning cap, preferably a CIP cleaning cap, for covering the filling element during cleaning of the filling element.
- the device further comprises (at least) one changing system which is designed to move the container carrier away from a (e.g. use) position directly beneath the filling element (e.g.
- the cleaning cap e.g. from an overhead non-use position of the cleaning cap
- a (e.g. use) position directly beneath the filling element preferably to pivot it towards it, particularly preferably about several pivot axes spaced apart from one another (e.g. parallel).
- the advantage of the interchangeable system is that it requires very little installation space.
- the container carrier can be moved from its position directly below the filling device to create space for the cleaning cap. This allows for CIP cleaning with automatic positioning of the cleaning cap, even with filling devices with a fill level probe and a comparatively small pitch.
- the exchange system is further configured to couple a movement of the container carrier and a movement of the cleaning cap to each other, preferably mechanically.
- a movement (e.g., pivoting away) of the container carrier from its position directly below the filling element and a movement (e.g. pivoting) of the cleaning cap to its position directly below the filling element can be coupled to one another, preferably mechanically.
- a movement (e.g. pivoting) of the container carrier to its position directly below the filling element and a movement (e.g. pivoting) of the cleaning cap away from its position directly below the filling element can be coupled to one another, preferably mechanically.
- the movements of the container carrier and the cleaning cap can thus be effected by a common drive device, thereby enabling a particularly space-saving solution.
- the changing system comprises a pivoting device, preferably with multiple pivot axes, and/or a lifting device (e.g., a pneumatic cylinder-piston unit) with a movable lifting element, preferably a reciprocating piston, for moving the container carrier and the cleaning cap.
- a lifting device e.g., a pneumatic cylinder-piston unit
- a movable lifting element preferably a reciprocating piston
- the pivoting device connects the movable lifting element to the container carrier and the cleaning cap. This advantageously allows a joint mechanical coupling of the container carrier and the cleaning cap to the movable lifting element via the pivoting device, whereby, for example, only the lifting device is required to drive the container carrier and the cleaning cap.
- such a configuration can allow only the lifting device to pivot the container carrier away, pivot the cleaning cap toward it, and lift the cleaning cap.
- pivoting can achieve an overhead orientation of the cleaning cap in a non-use position, allowing the cleaning cap to be easily emptied.
- the filling device has a centering bell into which a cap opening of the cleaning cap can be inserted and which can be moved vertically (e.g., by means of a vertical guide of the filling device) to vertically guide the container carrier during the second section of the stroke.
- the lifting device can thus enable the desired pivoting movement of the container carrier completely and, optionally, the desired pivoting movement of the cleaning cap partially.
- the lifting device can thus enable the desired pivoting movement of the container carrier completely and, optionally, the desired pivoting movement of the cleaning cap partially.
- the lifting device can partially enable the desired pivoting movement of the cleaning cap.
- the pivot arm and the lever element are connected to the movable lifting element via a plurality of pivot axes spaced apart from one another, preferably vertically, and preferably parallel, and/or the pivot arm and the lever element are connected to the cleaning cap via a plurality of pivot axes spaced apart from one another, preferably parallel.
- this allows the cleaning cap to be pivoted over a particularly large angular range without requiring a large stroke of the lifting element.
- this also allows for an overhead orientation of the cleaning cap in its non-use position.
- the lever element is connected to the movable lifting element via a (e.g. first and/or horizontal) pivot axis, and the pivot arm is connected via a (e.g. second/other) pivot axis that is spaced (e.g. vertically) apart, preferably parallel, (e.g. horizontal) pivot axis.
- the lever element is connected to the cleaning cap via a (e.g. third/further and/or horizontal) pivot axis, and the pivot arm is connected via a (e.g. fourth/further other) pivot axis that is spaced (e.g. horizontal) apart, preferably parallel.
- this advantageously allows the cleaning cap to be pivoted over a particularly large angular range without requiring a large stroke of the lifting element.
- this can also advantageously enable an overhead orientation of the cleaning cap in its non-use position.
- the lifting device comprises a lifting curve follower, preferably a roller, for following a (e.g., stationary) lifting curve (e.g., of the device).
- the lifting curve follower can preferably be operatively connected to the lifting element for vertically moving, preferably lifting, the lifting element.
- the lifting curve follower can be arranged at a lower end of the
- the lifting element can be arranged and, for example, supported. This advantageously provides a reliable, precise, and robust mechanical lifting device that does not require complex pneumatics to move the lifting element.
- the device further comprises a preferably mechanical locking device, which is designed to lock the lifting element, preferably automatically (e.g., elastically prestressed), when the cleaning cap is positioned (e.g., pivoted) in its position directly below the filling element.
- the locking device can be mechanically actuated (e.g., mechanically) to release the lifting element.
- the lifting element can be elastically prestressed for lowering, preferably to move the container carrier into its position directly below the filling element and/or to move the cleaning cap away from its position directly below the filling element.
- the lifting element can be lockable by a locking element of the locking device on a shoulder of the (e.g., stepped) lifting element.
- the locking device can enable the lifting element (and thus the cleaning cap and the container carrier) to assume defined positions.
- the cleaning cap can be securely positioned below the filling element when the lifting element is locked.
- the container carrier can be moved into its position directly below the filling element when the lifting element is unlocked. Under elastic preload, the lifting element can then, for example, always move in such a way that the container carrier reaches and maintains its defined position directly below the filling element.
- the exchange system is further configured to move, preferably pivot, the container carrier to its position directly below the filling element to complete cleaning of the filling element, and to move the cleaning cap away from its position directly below the filling element, preferably pivoting it away and/or into an overhead orientation of the cleaning cap.
- the cleaning cap can thus be moved away from the position directly below the filling element to create space for the container carrier for a normal operating mode/filling operating mode of the device.
- the changing system has a common and/or single drive source for moving both the container carrier from its position directly below the filling device and the cleaning cap to its position directly below the filling device and optionally vice versa. This advantageously enables a particularly space-saving device.
- the exchange system is further configured to pivot the cleaning cap toward its position directly below the filling device over a larger angular range than pivoting the container carrier away from its position directly below the filling device. This advantageously enables an overhead orientation of the cleaning cap in its non-use position.
- a non-use position of the container carrier and a non-use position (e.g., overhead) of the cleaning cap are arranged on opposite sides of the exchange system. This advantageously enables a particularly space-saving device and simple kinematics.
- the filling device has a fill level probe.
- the cleaning cap can be dimensioned to accommodate the fill level probe.
- the exchange system can be configured to move the cleaning cap so that the fill level probe is inserted into the cleaning cap for cleaning the filling device.
- the cleaning cap can thus also be advantageously used in a system with a fill level probe.
- the device further comprises a lifting system designed to jointly raise and lower the container carrier, the cleaning cap, and the exchange system.
- a lifting system designed to jointly raise and lower the container carrier, the cleaning cap, and the exchange system.
- a further aspect of the present disclosure relates to a container treatment system (e.g., for tempering, manufacturing, cleaning, coating, testing, filling, sealing, pasteurizing, labeling, printing, marking, laser marking, and/or packaging containers for liquid or pasty media, preferably beverages, liquid foodstuffs, or products from the pharmaceutical or healthcare industry).
- the container treatment system may comprise the device as disclosed herein.
- the containers can be designed as bottles, cans, canisters, cartons, flacons, tubes, etc.
- a further aspect of the present disclosure relates to a method for operating a (e.g., rotary) device, preferably as disclosed herein, for filling containers.
- the method comprises changing to a (e.g., CIP) cleaning operating mode of the device by moving, preferably pivoting, a container carrier (e.g., about a single pivot axis) from a (e.g., use) position directly below a filling element (e.g., to a laterally offset non-use position of the container carrier) and moving, preferably pivoting, a (e.g., CIP and/or tubular) cleaning cap, preferably about several (e.g., parallel) spaced-apart pivot axes (e.g., from an overhead non-use position of the cleaning cap) to a (e.g., use) position directly below the filling element by means of a changeover system.
- the method allows the same advantages to be achieved as have already been described with reference to the device. The same applies to the preferred embodiments
- the Figure 1 shows a device 10 for filling containers.
- the device 10 can, for example, be included in a container treatment plant.
- the container treatment plant can also have a device for closing the filled containers.
- the device for closing the filled containers can, for example, be connected to the device 10 via a container conveyor.
- the device 10 can fill the containers with a liquid or pasty medium.
- the device 10 is preferably designed as a rotary filling device, e.g., with a vertical central axis of rotation A.
- the device 10 can have multiple filling elements 12 for simultaneously or temporally overlapping filling of multiple containers.
- the filling elements 12 can be arranged around a circumference of a filling carousel of the rotary filling device.
- the Figure 2 shows a section of the device 10 with the filling element 12 (only shown schematically in Figure 2), a container carrier 24, a cleaning cap 26 and a changing system 30.
- the device 10 can further comprise a lifting system 22.
- the device 10 has a plurality of stations, each of which has a filling element 12, a container carrier 24, a cleaning cap 26, and a changing system 30, as well as optionally a lifting system 22.
- the stations can preferably be arranged distributed around a circumference of the device 10.
- the filling element 12 can be attached to a rotatable upper part 14 (only schematically shown in Figure 2 shown) of the device 10.
- the upper part 14 is preferably rotatable about a vertical central axis of rotation A of the device 10.
- the upper part 14 can be rotated by means of a vertically aligned main shaft/central shaft of the device 10.
- the upper part 14 can be raised and lowered by means of an adjustment device of the device 10. It is possible for the adjustment device to lower the upper part 14 into a lower or lowest position for a cleaning mode of operation of the device 10.
- the filling element 12 can, for example, have a filling valve with a movable valve member for opening and closing a filling material path.
- the filling element 12 can also have a centering bell 16 and/or a fill level probe 20.
- the centering bell 16 can center the container to be filled directly below the filling device 12.
- the centering bell 16 can have a conical receptacle for a container mouth.
- the receptacle can be open from the underside of the centering bell 16.
- the centering bell 16 can be vertically movable and guided.
- the centering bell 16 can be guided by means of a vertical guide 18 (only schematically shown in Figure 2 shown) can be vertically movable. It is possible for the centering bell 16 to be vertically movable relative to a filling material outlet or a filling valve housing of the filling element 12. Accordingly, the centering bell 16 can be lowered from a position adjacent to the outlet or the filling valve housing and/or raised from a lowered position to bear against the filling material outlet or the filling valve housing.
- the fill level probe 20 can protrude vertically downward from the filling device 12.
- the fill level probe 20 can be immersed in the container during filling of the container by means of the filling device 12.
- the fill level probe 20 can output a fill stop signal for the filling device 12 when a desired fill level is reached in the container.
- the fill level probe 20 can be designed, for example, as a short-circuit probe.
- the fill level probe 20 is an elongated component, for example, a rod-shaped or tubular one.
- a longitudinal axis of the elongated fill level probe 20 can be oriented vertically.
- the fill level probe 20 can extend through the centering bell 16.
- the lifting system 22 can raise and lower the container carrier 24. Preferably, the lifting system 22 raises and lowers the container carrier 24 together with the cleaning cap 26 and the change system 30.
- the lifting system 22 can lift the container carrier 24 with a container carried thereon for filling.
- the fill level probe 20 can be immersed in the container.
- the container mouth can be in contact with the centering bell 16 or can already be in contact with it.
- the lifting system 22 can lower the container carrier 24 with the filled container.
- the lifting system 22 it is possible for the lifting system 22 to lower the container carrier 24, the cleaning cap 26 and the changing system 30 into a lower or lowest position for a cleaning mode of operation of the device 10.
- the container carrier 24 can support a container.
- the container carrier can support the container during filling by means of the filling device 12.
- the container carrier can support the container at the bottom.
- the container carrier can be designed as a container support plate.
- the container carrier 24 can support the container, for example, at a container neck, at a container neck ring, or at a periphery of a container base (container body).
- the container carrier 24 can be positioned directly below the filling member 12. As explained in more detail herein, for a cleaning mode, the container carrier 24 can be moved away from this position directly below the filling member 12 by means of the change system 30 to make room for the cleaning cap 26.
- the cleaning cap 26 can cover the filling element 12 from below during cleaning of the filling element 12. Specifically, the filling element 12 can cover a filling material outlet of the filling element 12 from below. As a result, in a cleaning operating mode of the device 10, the cleaning cap 26 can guide a cleaning fluid flowing through the filling element 12 at the filling material outlet of the filling element 12 back into the filling element 12.
- the cleaning cap 26 is preferably designed as a so-called CIP cleaning cap or cleaning-in-place cleaning cap.
- the cleaning cap 26 can be dimensioned to accommodate the level probe 20.
- the cleaning cap can have an inner diameter that is larger than an outer diameter of the fill level probe 20.
- the cleaning cap 26 may have a length that is greater than a length of the fill level probe 20.
- the level probe 20 may be substantially tubular, with a closed end and an oppositely disposed open end.
- the cleaning cap 26 may, for example, have a cap mouth 28.
- the cap mouth 28 may, for example, be conical.
- An outer shape of the cap mouth 28 is preferably adapted to an inner shape of the centering bell 16.
- the cleaning cap 26 can be inserted into the centering bell 16 with its cap mouth 28.
- the centering bell 16 can then hold or secure/fix the cleaning cap 26, for example, with respect to a radial direction of a central vertical axis of the centering bell 16.
- the cleaning cap 26 may be positioned away from a position directly below the filling member 12, as in Figure 2 is shown.
- the cleaning cap 26 can be oriented upside down in its non-use position, e.g., parallel to a vertical axis or at an angle ⁇ 90° to the vertical axis (directed downwards).
- the cleaning cap 26 can be moved to a position directly below the filling member 12 by means of the change system 30 for a cleaning mode of operation.
- the changing system 30 is generally designed to move the container carrier 24 away from its position directly below the filling element 12 and to move the cleaning cap 26 to its position directly below the filling element 12 in order to clean the filling element 12.
- the changing system 30 can preferably move the container carrier 24 between its position (use position) directly below the filling element 12 and a non-use position of the container carrier 24, which is laterally offset from the use position.
- the changing system 30 can pivot the container carrier 24 away from its position directly below the filling element 12 to the side, e.g., about a preferably single and/or horizontal pivot axis and/or to the non-use position.
- the changing system 30 can preferably move the cleaning cap 26 between its position (use position) directly below the filling member 12 and a non-use position of the cleaning cap 26, which is laterally offset from the use position.
- the changing system 30 can move the cleaning cap 26 to its position directly below the Filling element 12 can be pivoted, particularly preferably about several pivot axes spaced parallel from one another and/or from the non-use position.
- a pivoting direction of the container carrier 24 from its position directly below the filling member 12 and a pivoting direction of the cleaning cap 26 to its position directly below the filling member 12 can coincide with each other.
- the non-use position of the container carrier 24 and the non-use position of the cleaning cap 26 can be arranged on opposite sides of the changing system 30.
- the exchange system 30 can move the container carrier 24 back to its position directly below the filling element 12, preferably pivoting it there, e.g., from its non-use position. Additionally, the exchange system 30 can move the cleaning cap 26 away from its (use) position directly below the filling element 12, preferably pivoting it away, e.g., into an overhead orientation of the cleaning cap 26 in its non-use position.
- the changing system 30 may comprise a lifting device 32 with a movable lifting element 34 and/or a pivoting device 38.
- the lifting device 32 may preferably be the sole drive source for moving both the container carrier 24 from its position directly below the filling member 12 and the cleaning cap 26 to its position directly below the filling member 12.
- the exchange system 30 couples the movement (e.g., moving away and/or toward) of the container carrier 24 and the movement (e.g., moving toward and/or away) of the cleaning cap 26 to one another, particularly preferably mechanically.
- the pivoting device 38 can connect the movable lifting element 34 to both the container carrier 24 and the cleaning cap 26.
- the lifting device 32 can have the movable lifting element 34.
- the lifting element 34 can be vertically retractable and extendable.
- the lifting element 34 can be designed as a lifting piston.
- the lifting piston can, for example, be guided vertically movable in a (lifting) cylinder 36. Together, the cylinder 36 and the lifting piston/lifting element 34 can form a piston-cylinder unit.
- the lifting device 32 can be a pneumatic
- the lifting device 32 can be a single-acting or double-acting pneumatic piston-cylinder unit.
- the lifting device 32 can be, for example, a motorized lifting device, an electric lifting device, or a mechanical lifting device.
- the lifting element 34 is elastically prestressed for lowering, as described herein by way of example with reference to the Figures 8 to 10 is explained.
- the lifting device 32 can, for example, be arranged below the pivoting device 38 and/or below the container carrier 24.
- the lifting device 32 itself can be connected to the lifting system 22 in a height-adjustable manner.
- the lifting system 22 can adjust the height of the lifting device 32 (and, for example, the pivoting device 38 connected thereto, the container carrier 24 connected thereto, and/or the cleaning cap 26 connected thereto).
- the pivoting device 38 can, preferably driven by the lifting device 32, pivot the container carrier 24 towards and away from its position directly below the filling member 12 and the cleaning cap 26 towards and away from its position directly below the filling member 12, preferably mechanically coupled to each other.
- the pivoting device 38 can, for example, be arranged between the container carrier 24 and the lifting device 32.
- the pivoting device 38 can have a housing 40 and a pivoting mechanism arranged therein.
- the pivoting device 38 may comprise a housing 40 and a pivoting mechanism arranged therein.
- the pivoting mechanism may, for example, comprise at least one lever element 42 (concealed in Figure 3 ; visible in Figure 4 ; omitted in Figures 5 and 6 ), at least one guide curve 44 (hidden in Figure 3 ; visible in Figures 4, 5 and 6 ) and at least one swivel arm 48 (concealed in Figure 3 ; visible in Figures 4 and 5 ; omitted in Figure 6 ).
- the pivoting device 38 has two mirror-symmetrically arranged lever elements 42, two mirror-symmetrically arranged guide curves 44 and two mirror-symmetrically arranged Pivoting arms 48.
- the mirror symmetry can exist with respect to a vertical center plane of the pivoting device 38. For clarity, reference is made below to only one of the elements, etc.
- the lever element 42 can be guided at a first end of the lever element 42 on the guide curve 44.
- the lever element 42 can have a guide element 46, such as a guide pin, at its first end, which can engage with the guide curve 44.
- the lever element 42 can be attached to the container carrier 24 at a second end of the lever element 42.
- the lever element 42 can be fixedly attached to the container carrier 24 at its second end, for example by means of a screw connection.
- the lever element 42 can be a two-sided lever. Between its first end and its second end, the lever element 42 can be pivotally connected to the movable lifting element 34. For example, the lever element 42 can be pivotally connected to an upper end of the movable lifting element 34. This connection can preferably be embodied as a horizontal pivot axis S1.
- the lever element 42 can also be pivotally connected to the cleaning cap 26.
- the lever element 42 can be pivotally connected to a lower end of the cleaning cap 26 (relative to an upright orientation of the cleaning cap 26). This connection can preferably be designed as a horizontal pivot axis S2.
- the lever element 42 with its three ends can be designed substantially triangularly.
- the guide curve 44 is preferably arranged in an inner side of the housing 40.
- the guide curve 44 can, for example, be designed as a guide curve groove.
- the guide curve 44 can be fixed relative to a stationary part, preferably the cylinder 36, of the lifting device 32, e.g. by means of a screw connection.
- the guide curve 44 has a stepped profile.
- the guide curve 44 can preferably have a first, substantially vertically extending guide curve section 44A, an adjoining second, substantially obliquely or horizontally extending guide curve section 44B and an adjoining third, substantially vertically extending guide curve section 44C, optionally with a widening outlet end 45 (see Figure 6 ).
- the pivoting effected by this course is described in more detail herein with reference to Figure 7 described.
- the guide curve 44 can also be referred to as a guide contour or guide slot.
- the pivot arm 48 can be pivotally connected to the movable lifting element 34 of the lifting device 32 at a first end of the pivot arm 48.
- the pivot arm 48 can be pivotally connected to an upper end of the movable lifting element 34.
- This connection can preferably be designed as a horizontal pivot axis S3.
- the pivot axis S3 can preferably be arranged above or below the pivot axis S1.
- the pivot arm 48 can be pivotally connected to the cleaning cap 26 at a second end of the pivot arm 48.
- the pivot arm 48 can be pivotally connected to a lower end of the cleaning cap 26 (relative to an upright orientation of the cleaning cap 26).
- This connection can preferably be embodied as a horizontal pivot axis S4.
- the pivot axis S4 can preferably be arranged laterally next to the pivot axis S3.
- the lever element 42 and the pivot arm 48 can thus be connected to the movable lifting element 34 via the pivot axes S1 and S3, respectively, and to the cleaning cap 26 via the pivot axes S2 and S4, respectively.
- the lever element 42 and the pivot arm 48 can jointly mechanically couple a movement of the container carrier 24 and a movement of the cleaning cap 26.
- the pivot axis S1, S2, S3 and/or S4 can, for example, (each) be designed as a plain bearing (e.g. plain bearing bush) and a pin, journal or bolt rotatably mounted in the plain bearing.
- a plain bearing e.g. plain bearing bush
- pivot axes S1, S2, S3 and/or S4 can be spaced parallel to each other.
- an imaginary connecting line (lever line) between the pivot axes S1 and S2 and an imaginary connecting line (pivot arm line) between the pivot axes S3 and S4 can cross each other.
- the guide element 46 can follow the guide curve 44.
- the container carrier 24 and the cleaning cap 26 can be slightly raised.
- this causes the container carrier 24 to pivot from the position directly below the filling element 12 and the cleaning cap 26 to pivot into its position directly below the filling element 12.
- the cleaning cap 26 can pivot over a larger angular range towards its position directly below the filling element 12 (e.g. between 90° and 180°) than the container carrier 24 pivots away from its position directly below the filling element 12 (e.g. between 45° and 90°).
- the cleaning cap 26 may already be aligned upright and preferably positioned directly below the lowered centering bell 16.
- the container carrier 24 and the cleaning cap 26 can be raised further.
- the cap mouth 28 of the cleaning cap 26 can dip into the lowered centering bell 16 and rest against it internally.
- the cap mouth 28 of the cleaning cap 26 can be positioned in the lowered centering bell 16.
- the centering bell 16, guided by the vertical guide 18, can take over the vertical guidance of the cleaning cap 26 toward the filling element 12.
- the centering bell 16 can be supported by the cleaning cap 26 and thus also lifted by the lifting device 32.
- the fill level probe 20 can be immersed or inserted into the cleaning cap 26.
- the pivoting of the container carrier 24 and the cleaning cap 26 disclosed herein is particularly preferred, it is in principle possible to configure the exchange system 30 differently, e.g., for laterally displacing the container carrier 24 and/or the cleaning cap 26.
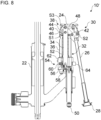
- FIGS. 8 to 10 show a modified device 10' (or sections thereof) with an exemplary lifting device 32 and a locking device 54.
- locking device 54 is also generally disclosed herein and, for example, in the patent application with reference to Figures 2 to 7 explained exemplary device 10 may be included.
- the lifting device 32 can preferably be designed as a mechanical lifting device.
- the lifting device 32 may have a lifting cam follower 50.
- the lifting cam follower 50 may be a stationary lifting cam (not shown in the Figures 8 to 10 ).
- the cam follower 50 can be designed as a roller, as in Figure 8 is shown.
- the cam follower 50, designed as a roller, can roll along (e.g. on) the cam.
- the lifting cam follower 50 can be operatively connected to the lifting element 34 for vertically moving the lifting element 34.
- the lifting cam follower 50 can be arranged at a lower end of the lifting element 34.
- the lifting cam follower 50 can, for example, be rotatably supported at a lower end of the lifting element 34.
- the lifting cam follower 50 can transmit a height profile of the lifting cam to the lifting element 34.
- the lifting curve follower 50 can lift the lifting element 34 according to a height profile of the lifting curve.
- the cleaning cap 26 can thus be moved to its position directly below the filling element 12 (see, for example, Figure 2 ) and the container carrier 24 can thus be moved from its position directly below the filling element 12 (see e.g. Figure 2 ) can be moved away.
- the lifting cam follower 50 can rest against the lifting cam, e.g., sit on it. In the direction of rotation of the device 10', the lifting cam can then lift the lifting element 34 by means of the lifting cam follower 50, e.g., against an elastic preload of the lifting element 34.
- the lifting element 34 is elastically prestressed for lowering.
- the lifting element 34 can be elastically preloaded for lowering by means of an elastic element 52.
- the elastic element 52 can, for example, be arranged to act between the lifting element 34 and the cylinder 36.
- the elastic element 52 can be arranged in the cylinder 36.
- the elastic element 52 can be designed as a (e.g., compression) spring, preferably a helical spring.
- the helical spring can be arranged coaxially with the lifting element 34.
- the helical spring is arranged between an outer peripheral surface of the lifting element 34 and an inner peripheral surface of the cylinder 36.
- the cleaning cap 26 can be removed from its position directly below the filling element 12 (see Figure 2 ) and the container carrier 24 can be moved to its position directly below the filling member 12 (see Figure 2 ) can be moved.
- the Figure 8 further that the cleaning cap 26 in its non-use position has an overhead orientation or is oriented downwards, wherein a longitudinal axis of the cleaning cap 26 forms an angle ⁇ 90°, preferably ⁇ 45° or ⁇ 25°, with a vertical axis.
- the locking device 54 can be configured to lock the lifting element 34 in a position in which the cleaning cap 26 is positioned directly below the filling element 12.
- the locking device 54 is a mechanical locking device.
- Examples include the Figures 8 and 9 the locking device 54 in an unlocking or release position.
- the locking device 54 is shown in a locking position.
- the locking device 54 can have a (e.g., horizontally) movable locking element 56.
- the locking element 56 can lock the lifting element 34 in a raised position of the lifting element 34, e.g., when the cleaning cap 26 is positioned directly below the filling element 12.
- the locking element 56 can, for example, be a sheet metal or a (e.g., metal) block.
- the locking element 56 can lock the lifting element 34 to a shoulder 58 of the lifting element 34.
- the locking element 56 can serve as a stop for the shoulder 58. In the locking position, the shoulder 58 and the locking element 56 can contact each other (see Figure 10 ). In the release position, the shoulder 58 and the locking element 56 may be at odds with each other (see Figures 8 and 9 ).
- the lifting element 34 can have two elongated piston sections.
- the two piston sections can be arranged offset horizontally and vertically from one another.
- the two piston sections of the lifting element 38 can be connected to one another via the shoulder 58.
- the lifting element 34 can be designed in a stepped manner with the shoulder 58 between the two piston sections.
- the lifting element 34 can preferably be multi-part, with two piston section parts that are connected and fastened to one another via a connecting part with the shoulder 58.
- the lifting element 34 can be designed, for example, as a (single) continuous piston rod.
- the shoulder 58 could preferably be formed as a cutout, e.g., a groove, a hole, or a bore, in the piston rod.
- the locking element 56 can be elastically preloaded to assume the locking position.
- an elastic element 60 such as a (e.g., coil and/or compression) spring, can elastically preload the locking element 56 to assume the locking position.
- one end of the elastic element 60 may be received in a support body 62.
- An opposite end of the elastic element 60 may be connected to the locking element 56, e.g., support it.
- the support body 62 can, for example, be attached to the cylinder 36.
- a longitudinal axis of the elastic element 60 can preferably extend horizontally.
- the lifting element 34 can slide along an end face of the locking element 56. Once the lifting element 34 has reached a raised position (e.g., caused by the lifting cam follower 50 and the lifting cam), the shoulder 58 can have passed the locking element 56. An upper edge of the locking element 56 can then be positioned below the shoulder 58. The locking element 56 can then be moved (e.g., caused by the elastic element 60) below the shoulder 58 to assume the locking position, thereby locking the lifting element 34 in the raised position. Accordingly, the cleaning cap 26 can be held in its position directly below the filling element 12 (see Figure 2 ) can be locked.
- the locking device 54 can be mechanically actuated to release the lifting element 34.
- the locking device 54 may, for example, comprise a movable unlocking element 64, e.g., a pressure plate.
- the unlocking element 64 may be operatively connected to the locking element 56 to move the locking element 56 away from the locked position.
- the unlocking element 64 and the locking element 56 can be arranged on opposite circumferential sides of the lifting element 34.
- the operative connection between the unlocking element 64 and the locking element 56 can be formed, for example, via a clamp-shaped or fork-shaped connection that bypasses the lifting element 34.
- Movement of the release element 64 toward the support body 62 can move the locking element 56 out of contact with the shoulder 58 until the lifting element 34 can pass the retracted locking element 56 again for lowering (e.g., under the action of the elastic element 52).
- a force applied by the release element 64 can preferably overcome the elastic preload of the locking element 56 by the elastic element 60.
- the unlocking element 64 can be moved by a stationary (e.g., pneumatic or electric) actuator (not shown).
- the actuator can, for example, be a control element (e.g., Control cam or roller).
- the unlocking element 64 In the extended or retracted state of the actuator, the unlocking element 64 can run along the control element upon rotation of the device 10' and can be pushed away from the control element to move the locking element 56 to release the lifting element 34.
- the invention is not limited to the preferred embodiments described above. Rather, a multitude of variants and modifications are possible which also make use of the inventive concept and therefore fall within the scope of protection.
- the invention also claims protection for the subject matter and features of the subclaims, independent of the claims referred to.
- the individual features of independent claim 1 are each disclosed independently of one another.
- the features of the subclaims are also disclosed independently of all features of independent claim 1 and, for example, independently of the features relating to the presence and/or configuration of the filling element, the container carrier, the cleaning cap and/or the exchange system of independent claim 1. All ranges stated herein are to be understood as disclosed in such a way that, as it were, all values falling within the respective range are individually disclosed, e.g., also as preferred, narrower outer limits of the respective range.
Landscapes
- Filling Of Jars Or Cans And Processes For Cleaning And Sealing Jars (AREA)
Abstract
Die Erfindung betrifft u.a. eine Vorrichtung (10), vorzugsweise Rundläufer-Vorrichtung, zum Füllen von Behältern. Die Vorrichtung (10) weist ein Füllorgan (12) zum Füllen eines Behälters, einen Behälterträger (24) zum Abstützen des Behälters beim Füllen des Behälters und eine Reinigungskappe (26) zum Abdecken des Füllorgans (12) beim Reinigen des Füllorgans (12) auf. Die Vorrichtung (10) weist ferner ein Wechselsystem (30) auf, das ausgebildet ist, zum Reinigen des Füllorgans (12) den Behälterträger (24) aus einer Position direkt unterhalb des Füllorgans (12) wegzubewegen, vorzugsweise wegzuschwenken, und die Reinigungskappe (26) zu einer Position direkt unterhalb des Füllorgans (12) hinzubewegen, vorzugsweise hinzuschwenken, besonders bevorzugt um mehrere voneinander beabstandete Schwenkachsen (S1, S2, S3, S4).
Description
- Die Erfindung betrifft eine Vorrichtung zum Füllen von Behältern. Die Erfindung betrifft ferner ein Verfahren zum Betreiben einer Vorrichtung zum Füllen von Behältern.
- Füllvorrichtungen zum Füllen von Behältern sind aus dem Stand der Technik seit langem bekannt. Dabei ist es aus dem Stand der Technik ebenfalls bekannt, dass derartige Füllvorrichtungen im Rahmen eines Reinigungsmodus mit einem flüssigen Reinigungsmittel gereinigt werden können. Dieses Reinigungsmittel kann dabei beispielsweise über die Produktzuleitung zugeführt werden und damit die einzelnen Füllelemente reinigen. Das Reinigungsmittel kann anschließend unter Verwendung einer sogenannten CIP-Kappe (CIP - engl.: cleaning in place) oder Abdeckung wieder zurückgeführt werden.
- Die
DE 37 22 495 A1 offenbart ein Füll- und Verschließmaschine für Gefäße wie Flaschen, Dosen, Kunststoffbehälter und dgl., bestehend aus rotierenden Tragkörpern für die Füllventile, Verschließaggregate und dgl. und diesen Füllventilen und Verschließaggregaten zugeordneten Standtellern und Huborganen und zwischen diesen und an den Füllventilen oder Verschließaggregaten ansetzbaren Spülbehältern zum Auffangen und Umlenken der während des Spülprozesses umlaufenden Reinigungsflüssigkeit. Die jeweiligen Spülbehälter in oder an der Füll- und Verschließmaschine sind automatisch aus einer Ruheposition außerhalb der Bewegungsbahn der Gefäße in eine Arbeitsposition unter die Füllventile und Verschließaggregate einfahrbar gelagert. Die Spülbehälter sind in oder an dem eigentlichen Huborgan angebracht und in oder an diesem aus einer Parkposition in eine Arbeitsposition verfahrbar und von dem Huborgan gegen das Füllelement bewegbar. - Zum weiteren Stand der Technik wird auf die
EP 1 270 498 A1 , dieJP S52 047042 U EP 2 748 102 B1 , dieEP 0 785 134 A2 , dieDE 10 2006 013 367 A1 , dieDE 10 2014 117 859 A1 , dieDE 43 43 425 A1 und dieDE 10 2011111 496 B3 hingewiesen. - Nachteilig am bekannten Stand der Technik kann der vergleichsweise große Bauraumbedarf für das System zum Bewegen des Spülbehälters bzw. der Reinigungskappe für das Füllorgan sein, insbesondere, wenn das Füllorgan noch eine längliche Füllhöhensonde aufweist, die mitgereinigt werden soll. In der Praxis führt dies dazu, dass bei geringem Platzbedarf bspw. aufgrund einer vergleichsweise kleinen Teilung (z. B. 87 mm oder 94 mm) der Füllstationen einer Rundläufervorrichtung die CIP-Reinigungskappen teilweise noch immer manuell angebracht und gelöst werden.
- Der Erfindung liegt die Aufgabe zu Grunde, eine verbesserte Technik zum Reinigen eines Füllorgans einer Füllvorrichtung zu schaffen, vorzugsweise mit einem besonders geringen Bauraumbedarf und/oder Anwendbarkeit bei einem Füllorgan mit Füllhöhensonde.
- Die Aufgabe wird gelöst durch die Merkmale der unabhängigen Ansprüche. Vorteilhafte Weiterbildungen sind in den abhängigen Ansprüchen und der Beschreibung angegeben.
- Ein Aspekt der vorliegenden Offenbarung betrifft eine Vorrichtung, vorzugsweise Rundläufer-Vorrichtung, zum Füllen von Behältern. Die Vorrichtung weist (mindestens) ein Füllorgan zum Füllen eines Behälters auf. Die Vorrichtung weist ferner (mindestens) einen Behälterträger, vorzugsweise Behälterstützplatte, zum (z. B. bodenseitigen) Abstützen des Behälters beim Füllen des Behälters auf. Die Vorrichtung weist ferner (mindestens) eine (z. B. rohrförmige) Reinigungskappe, vorzugsweise CIP-Reinigungskappe, zum Abdecken des Füllorgans beim Reinigen des Füllorgans auf. Die Vorrichtung weist ferner (mindestens) ein Wechselsystem auf, das ausgebildet ist, zum Reinigen des Füllorgans den Behälterträger aus einer (z. B. Gebrauchs-) Position direkt unterhalb des Füllorgans (z. B. zu einer seitlich dazu versetzten Nichtgebrauchsposition des Behälterträgers) wegzubewegen, vorzugsweise wegzuschwenken (z. B. um eine einzige Schwenkachse), und die Reinigungskappe (z. B. von einer Überkopf-Nichtgebrauchsposition der Reinigungskappe) zu einer (z. B. Gebrauchs-) Position direkt unterhalb des Füllorgans hinzubewegen, vorzugsweise hinzuschwenken, besonders bevorzugt um mehrere voneinander (z. B. parallel) beabstandete Schwenkachsen.
- Vorteilhaft ermöglicht das Wechselsystem, dass nur sehr wenig Bauraum benötigt wird. Der Behälterträger kann von der Position direkt unterhalb von dem Füllorgan wegbewegt werden, um Platz für die Reinigungskappe zu schaffen. Damit lässt sich eine CIP-Reinigung mit automatischer Positionierung der Reinigungskappe selbst bei Füllorganen mit Füllhöhensonde und vergleichsweise geringer Teilung erreichen.
- In einem Ausführungsbeispiel ist das Wechselsystem ferner dazu ausgebildet, eine Bewegung des Behälterträgers und eine Bewegung der Reinigungskappe miteinander, vorzugsweise mechanisch, zu koppeln. Vorzugsweise können ein Wegbewegen (z. B. Wegschwenken) des Behälterträgers aus seiner Position direkt unterhalb des Füllorgans und ein Hinbewegen (z. B. Hinschwenken) der Reinigungskappe zu ihrer Position direkt unterhalb des Füllorgans miteinander, vorzugsweise mechanisch, gekoppelt sein. Alternativ oder zusätzlich können beispielsweise ein Hinbewegen (z. B. Hinschwenken) des Behälterträgers zu seiner Position direkt unterhalb des Füllorgans und ein Wegbewegen (z. B. Wegschwenken) der Reinigungskappe aus ihrer Position direkt unterhalb des Füllorgans miteinander, vorzugsweise mechanisch, gekoppelt sein. Vorteilhaft können damit die Bewegungen des Behälterträgers und der Reinigungskappe durch eine gemeinsame Antriebseinrichtung bewirkt werden, wodurch eine besonders bauraumsparende Lösung ermöglicht wird.
- In einem weiteren Ausführungsbeispiel weist das Wechselsystem eine Schwenkeinrichtung, vorzugsweise mit mehreren Schwenkachsen, und/oder eine Hubeinrichtung (z. B. pneumatische Zylinder-Kolben-Einheit) mit einem bewegbaren Hubelement, vorzugsweise Hubkolben, zum Bewegen des Behälterträgers und der Reinigungskappe auf. Vorteilhaft können damit der Behälterträger und die Reinigungskappe von dem Wechselsystem geschwenkt und/oder angehoben werden.
- In einer Ausführungsform verbindet die Schwenkeinrichtung das bewegbare Hubelement mit dem Behälterträger und der Reinigungskappe. Vorteilhaft kann damit eine gemeinsame mechanische Kopplung des Behälterträgers und der Reinigungskappe über die Schwenkeinrichtung mit dem bewegbaren Hubelement erreicht werden, wodurch bspw. nur die Hubeinrichtung zum Antreiben des Behälterträgers und der Reinigungskappe erforderlich ist.
- In einer weiteren Ausführungsform ist das Wechselsystem ferner dazu ausgebildet, dass:
- ein erster Abschnitt eines Hubs des bewegbaren Hubelements ein Wegschwenken des Behälterträgers aus seiner Position direkt unterhalb des Füllorgans und ein Hinschwenken der Reinigungskappe zu ihrer Position direkt unterhalb des Füllorgans mittels der Schwenkeinrichtung bewirkt; und
- ein zweiter Abschnitt des Hubs, der an den ersten Abschnitt anschließt, eine Hubbewegung des Behälterträgers und der Reinigungskappe hin zu dem Füllorgan bewirkt.
- Vorteilhaft kann eine solche Konfiguration ermöglichen, dass nur die Hubeinrichtung benötigt wird, um den Behälterträger wegzuschwenken, die Reinigungskappe hinzuschwenken und die Reinigungskappe anzuheben. Vorteilhaft kann durch das Schwenken eine Überkopf-Ausrichtung der Reinigungskappe in einer Nichtgebrauchsposition erreicht werden, wodurch sich die Reinigungskappe auf einfache Weise leeren lässt.
- In einer Ausführungsvariante weist das Füllorgan eine Zentrierglocke auf, in die eine Kappenmündung der Reinigungskappe einführbar ist und die vertikal geführt bewegbar ist (z. B. mittels einer Vertikalführung des Füllorgans) zum vertikalen Führen des Behälterträgers im zweiten Abschnitt des Hubs. Vorteilhaft kann damit eine separate Vertikalführung für die Reinigungskappe eingespart werden, was wiederum besonders bauraumsparend ist.
- In einer weiteren Ausführungsvariante weist die Schwenkeinrichtung (mindestens) ein Hebelelement auf, das:
- an einem (z. B. ersten) Ende an einer Führungskurve, vorzugsweise Führungskurvennut, geführt ist; und/oder
- an einem (z. B. zweiten) Ende an dem Behälterträger angebracht ist; und/oder
- zwischen dem ersten Ende und dem zweiten Ende, vorzugsweise horizontal, schwenkbar mit dem bewegbaren Hubelement der Hubeinrichtung verbunden ist; und/oder
- an einem (z. B. dritten) Ende, vorzugsweise horizontal, schwenkbar mit der Reinigungskappe verbunden ist.
- Vorteilhaft kann damit, bewirkt durch die Hubeinrichtung, die gewünschte Schwenkbewegung des Behälterträgers vollständig und optional die gewünschte Schwenkbewegung der Reinigungskappe teilweise ermöglicht werden.
- In einer weiteren Ausführungsvariante ist mindestens eines erfüllt von:
- die Führungskurve ist in einem Gehäuseteil umfasst, vorzugsweise in einer Innenseite des Gehäuseteils;
- die Führungskurve ist relativ zu einem stationären Teil, vorzugsweise Hubzylinder, der Hubeinrichtung festgelegt;
- die Führungskurve weist einen Stufenverlauf auf; und
- die Führungskurve weist einen ersten, im Wesentlichen vertikal verlaufenden Führungskurvenabschnitt, einen daran anschließenden zweiten, im Wesentlichen schräg oder horizontal verlaufenden Führungskurvenabschnitt und einen daran anschließenden dritten, im Wesentlichen vertikal verlaufenden Führungskurvenabschnitt, optional mit einem sich (z. B. konisch) erweiternden Auslassende, auf.
- Vorteilhaft kann damit, bewirkt durch die Hubeinrichtung, die gewünschte Schwenkbewegung des Behälterträgers vollständig und optional die gewünschte Schwenkbewegung der Reinigungskappe teilweise ermöglicht werden.
- In einem Ausführungsbeispiel weist die Schwenkeinrichtung (mindestens) einen Schwenkarm auf, der
- an einem (z. B. ersten) Ende, vorzugsweise horizontal, schwenkbar mit dem bewegbaren Hubelement der Hubeinrichtung verbunden ist; und/oder
- an einem (z. B. zweiten) Ende, vorzugsweise horizontal, schwenkbar mit der Reinigungskappe verbunden ist.
- Vorteilhaft kann damit, bewirkt durch die Hubeinrichtung, die gewünschte Schwenkbewegung der Reinigungskappe teilweise ermöglicht werden.
- Vorzugsweise sind der Schwenkarm und das Hebelelement über mehrere voneinander, vorzugsweise vertikal, beabstandete, vorzugsweise parallele, Schwenkachsen mit dem bewegbaren Hubelement verbunden, und/oder der Schwenkarm und das Hebelelement sind über mehrere voneinander beabstandete, vorzugsweise parallele, Schwenkachsen mit der Reinigungskappe verbunden. Vorteilhaft kann damit die Reinigungskappe somit über einen besonders großen Winkelbereich verschwenkt werden, ohne dass hierfür ein großer Hub des Hubelements erforderlich ist. Vorteilhaft kann damit ebenfalls eine Überkopf-Ausrichtung der Reinigungskappe in deren Nichtgebrauchsposition ermöglicht werden.
- In einer Ausführungsform ist das Hebelelement über eine (z. B. erste und/oder horizontale) Schwenkachse und der Schwenkarm über eine (z. B. zweite / andere) dazu (z. B. vertikal) beabstandete, vorzugsweise parallele, (z. B. horizontale) Schwenkachse mit dem bewegbaren Hubelement verbunden. Alternativ oder zusätzlich ist das Hebelelement über eine (z. B. dritte / weitere und/oder horizontale) Schwenkachse und der Schwenkarm über eine (z. B. vierte / weitere andere) dazu beabstandete, vorzugsweise parallele, (z. B. horizontale) Schwenkachse mit der Reinigungskappe verbunden. Wie bereits erwähnt, kann damit vorteilhaft die Reinigungskappe über einen besonders großen Winkelbereich verschwenkt werden, ohne dass hierfür ein großer Hub des Hubelements erforderlich ist. Wie ebenfalls bereits erwähnt, kann damit vorteilhaft auch eine Überkopf-Ausrichtung der Reinigungskappe in deren Nichtgebrauchsposition ermöglicht werden.
- In einer Ausführungsvariante weist die Hubeinrichtung einen Hubkurvenfolger, vorzugsweise Rolle, zum Folgen einer (z. B. stationären) Hubkurve (z. B. der Vorrichtung) auf. Der Hubkurvenfolger kann vorzugsweise mit dem Hubelement zum vertikalen Bewegen, vorzugsweise Anheben, des Hubelements wirkverbunden sein. Beispielsweise kann der Hubkurvenfolger an einem unteren Ende des Hubelements angeordnet und bspw. getragen sein. Vorteilhaft kann somit eine zuverlässige, genaue und robuste mechanische Hubeinrichtung bereitgestellt werden, die ohne eine aufwendige Pneumatik zum Bewegen des Hubelements auskommen kann.
- In einer weiteren Ausführungsvariante weist die Vorrichtung ferner eine, vorzugsweise mechanische, Verriegelungseinrichtung auf, die zum, vorzugsweise selbsttätigen (z. B. elastisch vorgespannten), Verriegeln des Hubelements, wenn die Reinigungskappe in ihrer Position direkt unterhalb des Füllorgans positioniert (z. B. hingeschwenkt) ist, ausgebildet ist. Vorzugsweise kann die Verriegelungseinrichtung mechanisch zum Freigeben des Hubelements (z. B. mechanisch) betätigbar sein. Alternativ oder zusätzlich kann das Hubelement zum Absenken elastisch vorgespannt sein, vorzugsweise zum Hinbewegen des Behälterträgers in seine Position direkt unterhalb des Füllorgans und/oder zum Wegbewegen der Reinigungskappe aus ihrer Position direkt unterhalb des Füllorgans. Alternativ oder zusätzlich kann das Hubelement von einem Verriegelungselement der Verriegelungseinrichtung an einem Absatz des (z. B. gestuft ausgeführten) Hubelements verriegelbar sein.
- Vorteilhaft kann die Verriegelungseinrichtung die Einnahme definierter Positionen des Hubelements (und damit der Reinigungskappe und des Behälterträgers) ermöglichen. Beispielsweise kann die Reinigungskappe sicher in ihrer Position unterhalb des Füllorgans positioniert sein, wenn das Hubelement verriegelt ist. Andererseits kann bspw. der Behälterträger in seine Position direkt unterhalb des Füllorgans bewegt werden, wenn das Hubelement entriegelt ist. Unter elastischer Vorspannung kann sich das Hubelement dann bspw. immer so bewegen, dass der Behälterträger seine definierte Position direkt unterhalb des Füllorgans erreicht und hält.
- In einer weiteren Ausführungsform ist das Wechselsystem ferner dazu ausgebildet, zum Beenden des Reinigens des Füllorgans den Behälterträger zu seiner Position direkt unterhalb des Füllorgans hinzubewegen, vorzugsweise hinzuschwenken, und die Reinigungskappe aus ihrer Position direkt unterhalb des Füllorgans wegzubewegen, vorzugsweise wegzuschwenken und/oder in eine Überkopfausrichtung der Reinigungskappe. Vorteilhaft kann die Reinigungskappe damit von der Position direkt unterhalb von dem Füllorgan wegbewegt werden, um Platz für den Behälterträger für einen Normalbetriebsmodus/Füllbetriebsmodus der Vorrichtung zu schaffen.
- In einer Ausführungsvariante weist das Wechselsystem eine gemeinsame und/oder einzige Antriebsquelle zum Bewegen von sowohl dem Behälterträger aus seiner Position direkt unterhalb von dem Füllorgan als auch der Reinigungskappe zu ihrer Position direkt unterhalb von dem Füllorgan auf, und optional umgekehrt. Vorteilhaft kann damit eine besonders bauraumsparende Vorrichtung ermöglicht werden.
- In einer weiteren Ausführungsvariante ist das Wechselsystem ferner dazu ausgebildet, die Reinigungskappe über einen größeren Winkelbereich hin zu ihrer Position direkt unterhalb von dem Füllorgan hinzuschwenken als den Behälterträger aus seiner Position direkt unterhalb von dem Füllorgan wegzuschwenken. Vorteilhaft kann damit eine Überkopf-Ausrichtung der Reinigungskappe in deren Nichtgebrauchsposition ermöglicht werden.
- In einem Ausführungsbeispiel sind eine Nichtgebrauchsposition des Behälterträgers und eine (z. B. Überkopf-) Nichtgebrauchsposition der Reinigungskappe auf einander entgegengesetzten Seiten des Wechselsystems angeordnet. Vorteilhaft kann damit eine besonders bauraumsparende Vorrichtung sowie eine einfache Kinematik ermöglicht werden.
- In einem weiteren Ausführungsbeispiel weist das Füllorgan eine Füllhöhensonde auf. Die Reinigungskappe kann zum Aufnehmen der Füllhöhensonde dimensioniert sein. Optional kann das Wechselsystem dazu ausgebildet sein, die Reinigungskappe so zu bewegen, dass die Füllhöhensonde zum Reinigen des Füllorgans in die Reinigungskappe eingeführt wird. Vorteilhaft kann die Reinigungskappe somit auch bei einem System mit Füllhöhensonde genutzt werden.
- In einer Ausführungsform weist die Vorrichtung ferner ein Hubsystem auf, das dazu ausgebildet ist, den Behälterträger, die Reinigungskappe und das Wechselsystem gemeinsam anzuheben und abzusenken. Vorteilhaft kann damit im Normalbetrieb der Vorrichtung der auf dem Behälterträger abgestützte Behälter angehoben und abgesenkt werden.
- Ein weiterer Aspekt der vorliegenden Offenbarung betrifft eine Behälterbehandlungsanlage (z. B. zum Temperieren, Herstellen, Reinigen, Beschichten, Prüfen, Abfüllen, Verschließen, Pasteurisieren, Etikettieren, Bedrucken, Beschriften, Laserbeschriften und/oder Verpacken von Behältern für flüssige oder pastöse Medien, vorzugsweise Getränke, flüssige Nahrungsmittel oder Produkte aus der Pharma- oder Health-Care-Industrie). Die Behälterbehandlungsanlage kann die Vorrichtung wie hierin offenbart aufweisen.
- Beispielsweise können die Behälter als Flaschen, Dosen, Kanister, Kartons, Flakons, Tuben usw. ausgeführt sein.
- Ein weiterer Aspekt der vorliegenden Offenbarung betrifft ein Verfahren zum Betreiben einer (z. B. Rundläufer-) Vorrichtung, vorzugsweise wie hierin offenbart, zum Füllen von Behältern. Das Verfahren weist ein Wechseln zu einem (z. B. CIP-) Reinigungsbetriebsmodus der Vorrichtung durch Wegbewegen, vorzugsweise Wegschwenken, eines Behälterträgers (z. B um eine einzige Schwenkachse) aus einer (z. B. Gebrauchs-) Position direkt unterhalb von einem Füllorgan (z. B. zu einer seitlich dazu versetzten Nichtgebrauchsposition des Behälterträgers) und Hinbewegen, vorzugsweise Hinschwenken, einer (z. B. CIP- und/oder rohrförmigen) Reinigungskappe, vorzugsweise um mehrere voneinander (z. B. parallel) beabstandete Schwenkachsen, (z. B. von einer Überkopf-Nichtgebrauchsposition der Reinigungskappe) zu einer (z. B. Gebrauchs-) Position direkt unterhalb von dem Füllorgan mittels eines Wechselsystems auf. Vorteilhaft lassen sich mit dem Verfahren die gleichen Vorteile erzielen, die bereits unter Bezugnahme auf die Vorrichtung beschrieben wurden. Selbiges gilt für die untenstehend erläuterten bevorzugten Ausführungsbeispiele des Verfahrens.
- In einem Ausführungsbeispiel weist das Verfahren ferner mindestens eines auf von:
- Beenden des Reinigungsbetriebsmodus durch Hinbewegen, vorzugsweise Hinschwenken, des Behälterträgers zu seiner Position direkt unterhalb von einem Füllorgan und Wegbewegen, vorzugsweise Wegschwenken, der Reinigungskappe aus ihrer Position direkt unterhalb von dem Füllorgan, vorzugsweise in eine Überkopfausrichtung der Reinigungskappe, mittels des Wechselsystems;
- Koppeln, vorzugsweise mechanisches Koppeln, des Wegbewegens, vorzugsweise Wegschwenkens, des Behälterträgers aus seiner Position direkt unterhalb von dem Füllorgan und des Hinbewegens, vorzugsweise Hinschwenkens, der Reinigungskappe zu ihrer Position direkt unterhalb von dem Füllorgan mittels des Wechselsystems;
- Koppeln, vorzugsweise mechanisches Koppeln, eines Hinbewegens, vorzugsweise Hinschwenkens, des Behälterträgers zu seiner Position direkt unterhalb von dem Füllorgan und eines Wegbewegens, vorzugsweise Wegschwenkens, der Reinigungskappe aus ihrer Position direkt unterhalb von dem Füllorgan mittels des Wechselsystems;
- vertikales Führen der Reinigungskappe hin zu dem Füllorgan mittels einer Zentrierglocke des Füllorgans;
- Eintauchen einer Füllhöhensonde in die Reinigungskappe (z. B. bei einem vertikalen Bewegen der Reinigungskappe nach oben mittels des Wechselsystems, vorzugsweise geführt durch die Zentrierglocke); und
- (z. B. selbsttätiges und/oder elastisch vorgespanntes) Verriegeln der Reinigungskappe in ihrer Position direkt unterhalb von dem Füllorgan mittels einer, vorzugsweise mechanischen, Verriegelungseinrichtung, die bevorzugt ein Hubelement einer Hubeinrichtung des Wechselsystems verriegelt (z. B. an einem Absatz des Hubelements); und
- elastisches Vorspannen eines Hubelements einer Hubeinrichtung des Wechselsystems zum Absenken des Hubelements zum Hinbewegen des Behälterträgers zu seiner Position direkt unterhalb von dem Füllorgan und zum Wegbewegens der Reinigungskappe aus ihrer Position direkt unterhalb von dem Füllorgan.
- Die zuvor beschriebenen bevorzugten Ausführungsformen und Merkmale der Erfindung sind beliebig miteinander kombinierbar.
- Weitere Einzelheiten und Vorteile der Erfindung werden im Folgenden unter Bezug auf die beigefügten Zeichnungen beschrieben. Es zeigen:
- Figur 1
- eine rein schematische Darstellung einer Vorrichtung zum Füllen von Behältern gemäß einem Ausführungsbeispiel der vorliegenden Offenbarung;
- Figur 2
- eine Seitenansicht eines Abschnitts der Vorrichtung mit einem beispielhaften Wechselsystem;
- Figur 3
- eine Seitenansicht einer Schwenkeinrichtung des beispielspielhaften Wechselsystems;
- Figur 4
- eine weitere Seitenansicht der beispielhaften Schwenkeinrichtung ohne Darstellung einer Abdeckung eines Gehäuses;
- Figur 5
- eine weitere Seitenansicht der beispielhaften Schwenkeinrichtung ohne Darstellung einer Abdeckung des Gehäuses und eines Hebelelements;
- Figur 6
- eine Seitenansicht der beispielhaften Schwenkeinrichtung ohne Darstellung eines Behälterträgers, einer Abdeckung des Gehäuses und einer Schwenkmechanik der Schwenkeinrichtung;
- Figur 7
- eine Bewegungsabfolge zum Verbinden einer Reinigungskappe mit einem Füllorgan mittels des beispielhaften Wechselsystems;
- Figur 8
- eine schematische Schnittansicht eines Abschnitts einer beispielhaften Vorrichtung mit einer beispielhaften mechanischen Hubeinrichtung und einer Verriegelungseinrichtung;
- Figur 9
- eine schematische Schnittansicht eines Ausschnitts der beispielhaften Vorrichtung von
Figur 8 in einer Freigabestellung; und - Figur 10
- eine schematische Schnittansicht eines Ausschnitts der beispielhaften Vorrichtung von
Figur 8 in einer Verriegelungsstellung. - Die in den Figuren gezeigten Ausführungsformen stimmen zumindest teilweise überein, so dass ähnliche oder identische Teile mit den gleichen Bezugszeichen versehen sind und zu deren Erläuterung auch auf die Beschreibung der anderen Ausführungsformen bzw. Figuren verwiesen wird, um Wiederholungen zu vermeiden.
- Die
Figur 1 zeigt eine Vorrichtung 10 zum Füllen von Behältern. Die Vorrichtung 10 kann bspw. in einer Behälterbehandlungsanlage umfasst sein. Beispielsweise kann die Behälterbehandlungsanlage noch eine Vorrichtung zum Verschließen der gefüllten Behälter aufweisen. Die Vorrichtung zum Verschließen der gefüllten Behälter kann beispielsweise über einen Behälterförderer mit der Vorrichtung 10 verbunden sein. - Bevorzugt kann die Vorrichtung 10 die Behälter mit einem flüssigen oder pastösen Medium füllen. Die Vorrichtung 10 ist vorzugsweise als eine Rundläufer-Füllvorrichtung ausgeführt, z. B. mit einer vertikalen Zentraldrehachse A. Die Vorrichtung 10 kann mehrere Füllorgane 12 zum gleichzeitigen bzw. zeitlich überlappenden Befüllen mehrerer Behälter aufweisen. Bspw. können die Füllorgane 12 um einen Umfang eines Füllerkarussells der Rundläufer-Füllvorrichtung angeordnet sein.
- Die
Figur 2 zeigt einen Abschnitt der Vorrichtung 10 mit dem Füllorgan 12 (nur schematisch in Figur 2 dargestellt), einem Behälterträger 24, einer Reinigungskappe 26 und einem Wechselsystem 30. Optional kann die Vorrichtung 10 ferner ein Hubsystem 22 aufweisen. - Bevorzugt weist die Vorrichtung 10 mehrere Stationen auf, die jeweils ein Füllorgan 12, einen Behälterträger 24, eine Reinigungskappe 26 und ein Wechselsystem 30 sowie optional ein Hubsystem 22 aufweisen. Die Stationen können vorzugsweise verteilt um einen Umfang der Vorrichtung 10 herum angeordnet sein.
- Das Füllorgan 12 kann an einem drehbaren Oberteil 14 (nur schematisch in
Figur 2 dargestellt) der Vorrichtung 10 gehalten sein. Das Oberteil 14 ist vorzugsweise um eine vertikale Zentraldrehachse A der Vorrichtung 10 drehbar. Beispielsweise kann das Oberteil 14 mittels einer vertikal ausgerichteten Hauptwelle / Zentralwelle der Vorrichtung 10 gedreht werden. - Vorzugsweise kann das Oberteil 14 mittels einer Verstelleinrichtung der Vorrichtung 10 angehoben und abgesenkt werden. Es ist möglich, dass die Verstelleinrichtung das Oberteil 14 für einen Reinigungsbetriebsmodus der Vorrichtung 10 in eine untere oder unterste Stellung absenkt.
- Das Füllorgan 12 kann bspw. ein Füllventil mit einem bewegbaren Ventilglied zum Freigeben und Blockieren eines Füllgutpfads aufweisen. Vorzugsweise kann das Füllorgan 12 ferner eine Zentrierglocke 16 und/oder eine Füllhöhensonde 20 aufweisen.
- Die Zentrierglocke 16 kann den zu füllenden Behälter direkt unterhalb des Füllorgans 12 zentrieren. Beispielsweise kann die Zentrierglocke 16 eine konusförmige Aufnahme für eine Behältermündung des Behälters aufweisen. Die Aufnahme kann von einer Unterseite der Zentrierglocke 16 her offen sein.
- Vorzugweise kann die Zentrierglocke 16 vertikal bewegbar und geführt sein. Beispielsweise kann die Zentrierglocke 16 mittels einer Vertikalführung 18 (nur schematisch in
Figur 2 dargestellt) vertikal geführt bewegbar sein. Es ist möglich, dass die Zentrierglocke 16 relativ zu einem Füllgutauslass oder einem Füllventilgehäuse des Füllorgans 12 vertikal bewegbar ist. Entsprechend kann die Zentrierglocke 16 von einer Position anliegend an dem Auslass bzw. dem Füllventilgehäuse abgesenkt werden und/oder aus einer abgesenkten Position zum Anlegen an den Füllgutauslass bzw. das Füllventilgehäuse angehoben werden. - Die Füllhöhensonde 20 kann vertikal nach unten aus dem Füllorgan 12 herausragen. Die Füllhöhensonde 20 kann beim Füllen des Behälters mittels des Füllorgans 12 in den Behälter eingetaucht sein. Vorzugsweise kann die Füllhöhensonde 20 ein Füllstoppsignal für das Füllorgan 12 ausgeben, wenn eine gewünschte Füllhöhe in dem Behälter erreicht ist. Die Füllhöhensonde 20 kann beispielsweise als eine Kurzschlusssonde ausgeführt sein.
- Bevorzugt ist die Füllhöhensonde 20 ein längliches, zum Beispiel stabförmiges oder rohrförmiges, Bauteil. Eine Längsachse der länglichen Füllhöhensonde 20 kann vertikal ausgerichtet sein. Die Füllhöhensonde 20 kann sich durch die Zentrierglocke 16 hindurch erstrecken.
- Das Hubsystem 22 kann den Behälterträger 24 anheben und absenken. Bevorzugt hebt und senkt das Hubsystem 22 den Behälterträger 24 zusammen mit der Reinigungskappe 26 und dem Wechselsystem 30 an.
- Beispielsweise kann das Hubsystem 22 den Behälterträger 24 mit einem von diesem getragenen Behälter zum Füllen anheben. Beim Anheben kann die Füllhöhensonde 20 in den Behälter eintauchen. Beim Anheben kann die Behältermündung des Behälters sich an die Zentrierglocke 16 anlegen oder bereits angelegt sein. Nach dem Füllen kann das Hubsystem 22 den Behälterträger 24 mit dem gefüllten Behälter absenken.
- Es ist möglich, dass das Hubsystem 22 den Behälterträger 24, die Reinigungskappe 26 und das Wechselsystem 30 für einen Reinigungsbetriebsmodus der Vorrichtung 10 in eine untere oder unterste Stellung absenkt.
- Der Behälterträger 24 kann einen Behälter tragen. Der Behälterträger kann den Behälter beim Füllen mittels des Füllorgans 12 abstützen. Bevorzugt kann der Behälterträger den Behälter bodenseitig abstützen. Beispielsweise kann der Behälterträger als eine Behälterstützplatte ausgeführt sein. Alternativ oder zusätzlich kann der Behälterträger 24 den Behälter bspw. an einem Behälterhals, an einem Behälterhalsring oder an einem Umfang einer Behälterbasis (Behälterrumpfes) tragen.
- Im Normalbetriebsmodus (Füllbetriebsmodus) der Vorrichtung 10 kann der Behälterträger 24 direkt unterhalb von dem Füllorgan 12 positioniert sein. Wie hierin noch genauer erläutert ist, kann der Behälterträger 24 für einen Reinigungsbetriebsmodus aus dieser Position direkt unterhalb von dem Füllorgan 12 mittels des Wechselsystems 30 wegbewegt werden, um Platz für die Reinigungskappe 26 zu schaffen.
- Die Reinigungskappe 26 kann das Füllorgan 12 beim Reinigen des Füllorgans 12 von unten abdecken. Im Einzelnen kann das Füllorgan 12 einen Füllgutauslass des Füllorgans 12 von unten abdecken. Dadurch kann die Reinigungskappe 26 in einem Reinigungsbetriebsmodus der Vorrichtung 10 eine durch das Füllorgan 12 strömende Reinigungsflüssigkeit am Füllgutauslass des Füllorgans 12 wieder zurück in das Füllorgan 12 führen.
- Bevorzugt ist die Reinigungskappe 26 als eine sogenannte CIP-Reinigungskappe bzw. Cleaning-In-Place-Reinigungskappe ausgeführt.
- Vorzugsweise kann die Reinigungskappe 26 zum Aufnehmen der Füllhöhensonde 20 dimensioniert sein. Beispielsweise kann die Reinigungskappe einen Innendurchmesser aufweisen, der größer als ein Außendurchmesser der Füllhöhensonde 20 ist. Beispielsweise kann die Reinigungskappe 26 eine Länge aufweisen, die größer als eine Länge der Füllhöhensonde 20 ist.
- Beispielsweise kann die Füllhöhensonde 20 im Wesentlichen rohrförmig sein, mit einem geschlossenen Ende und einem entgegengesetzt dazu angeordneten, offenen Ende.
- Die Reinigungskappe 26 kann beispielsweise eine Kappenmündung 28 aufweisen. Die Kappenmündung 28 kann bspw. konusförmig sein.
- Eine Außenform der Kappenmündung 28 ist vorzugweise an einen Innenform der Zentrierglocke 16 angepasst. Vorzugsweise kann die Reinigungskappe 26 mit ihrer Kappenmündung 28 in die Zentrierglocke 16 einführbar sein. Die Zentrierglocke 16 kann dann die Reinigungskappe 26 bspw. bezüglich einer Radialrichtung einer Mittelhochachse der Zentrierglocke 16 halten bzw. sichern / festlegen.
- Im Normalbetriebsmodus (Füllbetriebsmodus) der Vorrichtung 10 kann die Reinigungskappe 26 entfernt von einer Position direkt unterhalb von dem Füllorgan 12 positioniert sein, wie in
Figur 2 dargestellt ist. Bevorzugt kann die Reinigungskappe 26 in ihrer Nichtgebrauchsposition über Kopf ausgerichtet sein, z. B. parallel zu einer Vertikalachse oder mit einem Winkel < 90° zu der Vertikalachse (nach unten gerichtet). Wie hierin noch genauer erläutert ist, kann die Reinigungskappe 26 für einen Reinigungsbetriebsmodus zu einer Position direkt unterhalb von dem Füllorgan 12 mittels des Wechselsystems 30 hinbewegt werden. - Das Wechselsystem 30 ist allgemein dazu ausgebildet, zum Reinigen des Füllorgans 12 den Behälterträger 24 aus seiner Position direkt unterhalb des Füllorgans 12 wegzubewegen und die Reinigungskappe 26 zu ihrer Position direkt unterhalb des Füllorgans 12 hinzubewegen.
- Im Einzelnen kann das Wechselsystem 30 vorzugsweise den Behälterträger 24 zwischen seiner Position (Gebrauchsposition) direkt unterhalb von dem Füllorgan 12 und einer Nichtgebrauchsposition des Behälterträgers 24, die seitlich versetzt zu der Gebrauchsposition ist, bewegen. Bevorzugt kann das Wechselsystem 30 den Behälterträger 24 aus seiner Position direkt unterhalb des Füllorgans 12 zur Seite wegschwenken, z. B. um eine, vorzugsweise einzige und/oder horizontale, Schwenkachse und/oder zu der Nichtgebrauchsposition.
- Im Einzelnen kann das Wechselsystem 30 vorzugsweise die Reinigungskappe 26 zwischen ihrer Position (Gebrauchsposition) direkt unterhalb von dem Füllorgan 12 und einer Nichtgebrauchsposition der Reinigungskappe 26, die seitlich versetzt zu der Gebrauchsposition ist, bewegen. Vorzugsweise kann das Wechselsystem 30 die Reinigungskappe 26 zu ihrer Position direkt unterhalb des Füllorgans 12 hinschwenken, besonders bevorzugt um mehrere voneinander parallel beabstandete Schwenkachsen und/oder von der Nichtgebrauchsposition.
- Bevorzugt können eine Wegschwenkrichtung des Behälterträgers 24 aus seiner Position direkt unterhalb des Füllorgans 12 und eine Hinschwenkrichtung der Reinigungskappe 26 zu ihrer Position direkt unterhalb des Füllorgans 12 miteinander übereinstimmen.
- Vorzugsweise können die Nichtgebrauchsposition des Behälterträgers 24 und die Nichtgebrauchsposition der Reinigungskappe 26 auf einander entgegengesetzten Seiten des Wechselsystems 30 angeordnet sein.
- Das Wechselsystem 30 kann ferner zum Beenden des Reinigens des Füllorgans 12 den Behälterträger 24 wieder zu seiner Position direkt unterhalb des Füllorgans 12 hinbewegen, vorzugsweise hinschwenken, z. B. von seiner Nichtgebrauchsposition. Zusätzlich kann das Wechselsystem 30 die Reinigungskappe 26 aus ihrer (Gebrauchs-) Position direkt unterhalb des Füllorgans 12 wegbewegen, vorzugsweise wegschwenken, z. B. in eine Überkopfausrichtung der Reinigungskappe 26 in ihrer Nichtgebrauchsstellung.
- Bevorzugt kann das Wechselsystem 30 eine Hubeinrichtung 32 mit einem bewegbaren Hubelement 34 und/oder eine Schwenkeinrichtung 38 aufweisen.
- Die Hubeinrichtung 32 kann vorzugsweise die einzige Antriebsquelle zum Bewegen von sowohl dem Behälterträger 24 aus seiner Position direkt unterhalb von dem Füllorgan als auch der Reinigungskappe 26 zu ihrer Position direkt unterhalb von dem Füllorgan 12 sein.
- Vorzugsweise koppelt das Wechselsystem 30 das (z. B. Weg- und/oder Hin-) Bewegen des Behälterträgers 24 und das (z. B. Hin- und/oder Weg-) Bewegen der Reinigungskappe 26 miteinander, besonders bevorzugt mechanisch. Beispielsweise kann die Schwenkeinrichtung 38 das bewegbare Hubelement 34 mit sowohl dem Behälterträger 24 als auch der Reinigungskappe 26 verbinden.
- Wie erwähnt, kann die Hubeinrichtung 32 das bewegbare Hubelement 34 aufweisen. Das Hubelement 34 kann vertikal ein- und ausfahrbar sein. Beispielsweise kann das Hubelement 34 als ein Hubkolben ausgeführt sein. Der Hubkolben kann beispielsweise vertikal bewegbar in einem (Hub-) Zylinder 36 geführt sein. Zusammen können der Zylinder 36 und der Hubkolben/das Hubelement 34 eine Kolben-Zylinder-Einheit bilden. Bevorzugt kann die Hubeinrichtung 32 eine pneumatische Hubeinrichtung, z. B. eine einfachwirkende oder eine doppeltwirkende pneumatische Kolben-Zylinder-Einheit, sein. Alternativ kann die Hubeinrichtung 32 bspw. eine motorische Hubeinrichtung, eine elektrische Hubeinrichtung oder eine mechanische Hubeinrichtung sein.
- Es ist möglich, dass das Hubelement 34 zum Absenken elastisch vorgespannt ist, wie hierin noch beispielhaft unter Bezugnahme auf die
Figuren 8 bis 10 erläutert ist. - Die Hubeinrichtung 32 kann bspw. unterhalb von der Schwenkeinrichtung 38 und/oder unterhalb von dem Behälterträger 24 angeordnet sein.
- Bevorzugt kann die Hubeinrichtung 32 selbst höhenverstellbar mit dem Hubsystem 22 verbunden sein. D.h., das Hubsystem 22 kann die Hubeinrichtung 32 (und beispielsweise die damit verbundenen Schwenkeinrichtung 38, den damit verbundenen Behälterträger 24 und/oder die damit verbundene Reinigungskappe 26) in der Höhe verstellen.
- Die Schwenkeinrichtung 38 kann, vorzugsweise angetrieben durch die Hubeinrichtung 32, den Behälterträger 24 hin zu und weg von seiner Position direkt unterhalb von dem Füllorgan 12 und die Reinigungskappe 26 hin zu und weg von ihrer Position direkt unterhalb von dem Füllorgan 12 schwenken, vorzugsweise mechanisch gekoppelt miteinander.
- Die Schwenkeinrichtung 38 kann bspw. zwischen dem Behälterträger 24 und der Hubeinrichtung 32 angeordnet sein. Die Schwenkeinrichtung 38 kann ein Gehäuse 40 und eine darin angeordnete Schwenkmechanik aufweisen.
- Nachfolgend ist unter Bezugnahme auf die
Figuren 3 bis 6 eine besonders bevorzugte Ausführungsform der Schwenkeinrichtung 38 beschrieben. - Die Schwenkeinrichtung 38 kann ein Gehäuse 40 und eine darin angeordnete Schwenkmechanik aufweisen. Die Schwenkmechanik kann bspw. mindestens ein Hebelelement 42 (verdeckt in
Figur 3 ; sichtbar inFigur 4 ; weggelassen inFigur 5 und 6 ), mindestens eine Führungskurve 44 (verdeckt inFigur 3 ; sichtbar inFigur 4, 5 und 6 ) und mindestens einen Schwenkarm 48 (verdeckt inFigur 3 ; sichtbar inFigur 4 und 5 ; weggelassen inFigur 6 ) aufweisen. - Bevorzugt weist die Schwenkeinrichtung 38 zwei spiegelsymmetrisch angeordnete Hebelelemente 42, zwei spiegelsymmetrisch angeordnete Führungskurven 44 und zwei spiegelsymmetrisch angeordnete Schwenkarme 48 auf. Vorzugsweise kann die Spiegelsymmetrie bezüglich einer Vertikalmittelebene der Schwenkeinrichtung 38 bestehen. Nachfolgend ist zur besseren Verständlichkeit jeweils nur auf eines der Elemente usw. Bezug genommen.
- Das Hebelelement 42 kann einem ersten Ende des Hebelelements 42 an der Führungskurve 44 geführt sein. Beispielsweise kann das Hebelelement 42 an seinem ersten Ende ein Führungselement 46, wie beispielsweise einen Führungszapfen, aufweisen, der in die Führungskurve 44 eingreifen kann.
- Das Hebelelement 42 kann an einem zweiten Ende des Hebelelements 42 an dem Behälterträger 24 angebracht sein. Beispielsweise kann das Hebelelement 42 an seinem zweiten Ende fest an dem Behälterträger 24 angebracht sein, zum Beispiel mittels einer Schraubverbindung.
- Das Hebelelement 42 kann ein zweiseitiger Hebel sein. Zwischen seinem ersten Ende und seinem zweiten Ende kann das Hebelelement 42 schwenkbar mit dem bewegbaren Hubelement 34 verbunden sein. Beispielsweise kann das Hebelelement 42 schwenkbar mit einem oberen Ende des bewegbaren Hubelements 34 verbunden sein. Bevorzugt kann diese Verbindung als eine horizontale Schwenkachse S1 ausgeführt sein.
- Das Hebelelement 42 kann noch schwenkbar mit der Reinigungskappe 26 verbunden sein. Beispielsweise kann das Hebelelement 42 schwenkbar mit einem unteren Ende der Reinigungskappe 26 (bezogen auf eine aufrechte Ausrichtung der Reinigungskappe 26) verbunden sein. Bevorzugt kann diese Verbindung als eine horizontale Schwenkachse S2 ausgeführt sein.
- Vorzugsweise kann das Hebelelement 42 mit seinen drei Enden im Wesentlichen dreieckförmig ausgeführt sein.
- Die Führungskurve 44 ist vorzugsweise in einer Innenseite des Gehäuses 40 angeordnet. Die Führungskurve 44 kann bspw. als eine Führungskurvennut ausgeführt sein.
- Die Führungskurve 44 kann relativ zu einem stationären Teil, vorzugsweise dem Zylinder 36, der Hubeinrichtung 32 festgelegt sein, z. B. mittels einer Schraubverbindung.
- Vorzugsweise weist die Führungskurve 44 einen Stufenverlauf auf. Im Einzelnen kann die Führungskurve 44 bevorzugt einen ersten, im Wesentlichen vertikal verlaufenden Führungskurvenabschnitt 44A, einen daran anschließenden zweiten, im Wesentlichen schräg oder horizontal verlaufenden Führungskurvenabschnitt 44B und einen daran anschließenden dritten, im Wesentlichen vertikal verlaufenden Führungskurvenabschnitt 44C, optional mit einem sich erweiternden Auslassende 45, aufweisen (siehe
Figur 6 ). Die durch diesen Verlauf bewirkte Schwenkung ist hierin noch genauer unter Bezugnahme aufFigur 7 beschrieben. - Die Führungskurve 44 kann auch als Führungskontur oder Führungskulisse bezeichnet werden.
- Der Schwenkarm 48 kann an einem ersten Ende des Schwenkarms 48 schwenkbar mit dem bewegbaren Hubelement 34 der Hubeinrichtung 32 verbunden sein. Beispielsweise kann der Schwenkarm 48 schwenkbar mit einem oberen Ende des bewegbaren Hubelements 34 verbunden sein. Bevorzugt kann diese Verbindung als eine horizontale Schwenkachse S3 ausgeführt sein. Die Schwenkachse S3 kann vorzugsweise oberhalb oder unterhalb von der Schwenkachse S1 angeordnet sein.
- Der Schwenkarm 48 kann an einem zweiten Ende des Schwenkarms 48 schwenkbar mit der Reinigungskappe 26 verbunden sein. Beispielsweise kann der Schwenkarm 48 schwenkbar mit einem unteren Ende der Reinigungskappe 26 (bezogen auf eine aufrechte Ausrichtung der Reinigungskappe 26) verbunden sein. Bevorzugt kann diese Verbindung als eine horizontale Schwenkachse S4 ausgeführt sein. Die Schwenkachse S4 kann vorzugsweise seitlich neben der Schwenkachse S3 angeordnet sein.
- Vorzugsweise können das Hebelelement 42 und der Schwenkarm 48 somit über die Schwenkachsen S1 bzw. S3 mit dem bewegbaren Hubelement 34 verbunden sein und über die Schwenkachsen S2 bzw. S4 mit der Reinigungskappe 26 verbunden sein. Damit können das Hebelelement 42 und der Schwenkarm 48 gemeinsam eine Bewegung des Behälterträgers 24 und eine Bewegung der Reinigungskappe 26 mechanisch miteinander koppeln.
- Die Schwenkachse S1, S2, S3 und/oder S4 kann bspw. (jeweils) als ein Gleitlager (z. B. Gleitlagerbuchse) und ein in dem Gleitlager drehbar gelagerter Stift, Zapfen oder Bolzen ausgeführt sein.
- Vorzugweise können die Schwenkachsen S1, S2, S3 und/oder S4 parallel beabstandet zueinander sein.
- Bevorzugt können sich eine gedachte Verbindungslinie (Hebellinie) zwischen der Schwenkachse S1 und S2 und eine gedachte Verbindungslinie (Schwenkarmlinie) zwischen der Schwenkachse S3 und S4 einander kreuzen.
- Nachfolgend ist unter Bezugnahme auf die
Figur 7 ein Betrieb des beispielhaften Wechselsystems 30 zum Wechseln zu einem Reinigungsbetriebsmodus der Vorrichtung 10 näher beschrieben. Zum besseren Verständnis sind inFigur 7 die Hubeinrichtung 32 transparent und das Gehäuse der Schwenkeinrichtung 38 geöffnet dargestellt. - Wie in den ersten vier dargestellten Zeichnungen in
Figur 7 nachverfolgt werden kann, kann in einem ein erster Abschnitt eines Hubs des bewegbaren Hubelements 34 ein Schwenken des Behälterträgers 24 aus seiner Position direkt unterhalb des Füllorgans 12 und ein Schwenken der Reinigungskappe 26 in ihre Position direkt unterhalb des Füllorgans 12 bewirkt werden. - Hierbei kann das Führungselement 46 der Führungskurve 44 folgen.
- Im (optionalen) ersten Führungskurvenabschnitt 44A können der Behälterträger 24 und die Reinigungskappe 26 etwas angehoben werden.
- Im zweiten Führungskurvenabschnitt 44B bewirkt dieser das Verschwenken des Behälterträgers 24 aus der Position direkt unterhalb des Füllorgans 12 und das Verschwenken der Reinigungskappe 26 in ihre Position direkt unterhalb des Füllorgans 12. Durch die beispielhafte erläuterte spezielle Konfiguration der Schwenkeinrichtung 38 mit den mehreren Schwenkachse S1-S4 usw. kann dabei die Reinigungskappe 26 über einen größeren Winkelbereich hin zu ihrer Position direkt unterhalb von dem Füllorgan 12 hinschwenken (z. B. zwischen 90° und 180°) als der Behälterträger 24 aus seiner Position direkt unterhalb von dem Füllorgan 12 wegschwenkt (z. B. zwischen 45° und 90°).
- Am Ende des zweiten Führungskurvenabschnitts 44B kann die Reinigungskappe 26 bereits aufrecht ausgerichtet und bevorzugt unmittelbar unter der herabgelassenen Zentrierglocke 16 positioniert sein.
- Im dritten Führungskurvenabschnitt 44A können der Behälterträger 24 und die Reinigungskappe 26 weiter angehoben werden. Dabei kann die Kappenmündung 28 der Reinigungskappe 26 in die herabgelassene Zentrierglocke 16 eintauchen und sich innen an diese anlegen. Am Ende des dritten Führungskurvenabschnitts 44C kann die Kappenmündung 28 der Reinigungskappe 26 in der herabgelassenen Zentrierglocke 16 positioniert sein.
- Wie in den letzten beiden Zeichnungen in
Figur 7 nachverfolgt werden kann, kann in einem zweiten Abschnitt des Hubs, der an den ersten Abschnitt anschließt, des bewegbaren Hubelements 34 eine reine Hubbewegung des Behälterträgers 24 und der Reinigungskappe 26 hin zu dem Füllorgan 12 bewirkt werden. - Die mittels der Vertikalführung 18 geführte Zentrierglocke 16 kann dabei die vertikale Führung der Reinigungskappe 26 hin zu dem Füllorgan 12 übernehmen. Vorzugsweise kann die Zentrierglocke 16 dabei von der Reinigungskappe 26 abgestützt und somit ebenfalls mittels der Hubeinrichtung 32 angehoben werden.
- Im zweiten Abschnitt des Hubs kann die Füllhöhensonde 20 in die Reinigungskappe 26 eintauchen bzw. eingeführt werden.
- Sobald die Zentrierglocke 16 den Füllgutauslass des Füllorgans 12 abdichtend kontaktiert, kann die Zuführung des flüssigen Reinigungsmittels zum CIP-Reinigung des Füllorgans 12 begonnen werden.
- Am Ende des Reinigungsmodus können die erläuterten Bewegungsabläufe in umgekehrter Reihenfolge durchgeführt werden.
- Auch wenn das hierin offenbarte Verschwenken des Behälterträgers 24 und der Reinigungskappe 26 besonders bevorzugt ist, ist es prinzipiell möglich, das Wechselsystem 30 anders zu konfigurieren, z. B. zum seitlichen Verschieben des Behälterträgers 24 und/oder der Reinigungskappe 26.
- Die
Figuren 8 bis 10 zeigen eine modifizierte Vorrichtung 10' (bzw. Ausschnitte davon) mit einer beispielhaften Hubeinrichtung 32 und einer Verriegelungseinrichtung 54. - Es versteht sich, dass die Verrieglungseinrichtung 54 hierin auch allgemein offenbart und bspw. in der unter Bezugnahme auf die
Figuren 2 bis 7 erläuterten, beispielhaften Vorrichtung 10 umfasst sein kann. - Die Hubeinrichtung 32 kann bevorzugt als eine mechanische Hubeinrichtung ausgeführt sein.
- Beispielsweise kann die Hubeinrichtung 32 einen Hubkurvenfolger 50 aufweisen. Der Hubkurvenfolger 50 kann einer stationären Hubkurve (nicht dargestellt in den
Figuren 8 bis 10 ) folgen. Beispielsweise kann der Hubkurverfolger 50 als eine Rolle ausgeführt sein, wie inFigur 8 dargestellt ist. Der als Rolle ausgeführte Hubkurvenfolger 50 kann an (z. B. auf) der Hubkurve abrollen. - Der Hubkurvenfolger 50 kann mit dem Hubelement 34 zum vertikalen Bewegen des Hubelements 34 wirkverbunden sein. Beispielsweise kann der Hubkurvenfolger 50 an einem unteren Ende des Hubelements 34 angeordnet sein. Der Hubkurvenfolger 50 kann bspw. drehbar an einem unteren Ende des Hubelements 34 getragen sein. Der Hubkurvenfolger 50 kann einen Höhenverlauf der Hubkurve auf das Hubelement 34 übertragen.
- Bevorzugt kann der Hubkurvenfolger 50 das Hubelement 34 entsprechend eines Höhenverlaufs der Hubkurve anheben. Die Reinigungskappe 26 kann so zu ihrer Position direkt unterhalb des Füllorgans 12 (siehe z. B.
Figur 2 ) hinbewegt werden, und der Behälterträger 24 kann so aus seiner Position direkt unterhalb des Füllorgans 12 (siehe z. B.Figur 2 ) wegbewegt werden. - Wird bspw. das Hubelement 34 und der damit verbundene Hubkurvenfolger 50 in die unterste Stellung bewegt und die Vorrichtung 10' gedreht (vgl.
Figur 1 ), dann kann der Hubkurvenfolger 50 an der Hubkurve anliegen, z. B. auf dieser aufsitzen. In Drehrichtung der Vorrichtung 10' kann die Hubkurve dann das Hubelement 34 mittels des Hubkurvenfolger 50 anheben, z. B. gegen eine elastische Vorspannung des Hubelements 34. - Es ist möglich, dass das Hubelement 34 zum Absenken elastisch vorgespannt ist.
- Beispielsweise kann das Hubelement 34 mittels eines elastischen Elements 52 elastisch zum Absenken vorgespannt sein. Das elastische Element 52 kann bspw. zwischen dem Hubelement 34 und dem Zylinder 36 wirkend angeordnet sein. Bevorzugt kann das elastische Element 52 in dem Zylinder 36 angeordnet sein.
- Beispielsweise kann das elastische Element 52 als eine (z. B. Druck-) Feder, vorzugsweise eine Schraubenfeder, ausgeführt sein. Die Schraubenfeder kann koaxial zu dem Hubelement 34 angeordnet sein. Bevorzugt ist die Schraubenfeder zwischen einer Außenumfangsfläche des Hubelements 34 und einer Innenumfangsfläche des Zylinders 36 angeordnet.
- Mittels des elastischen Elements 52 kann nach einem Einsatz der Reinigungskappe 26, z. B. nach einer CIP-Reinigung, die Reinigungskappe 26 aus ihrer Position direkt unterhalb des Füllorgans 12 (siehe
Figur 2 ) wegbewegt werden, und der Behälterträger 24 kann zu seiner Position direkt unterhalb des Füllorgans 12 (sieheFigur 2 ) hinbewegt werden. - Rein beispielhaft zeigt die
Figur 8 ferner, dass die Reinigungskappe 26 in ihrer Nichtgebrauchsposition eine Überkopf-Ausrichtung aufweist bzw. nach unten ausgerichtet ist, wobei eine Längsachse der Reinigungskappe 26 mit einer Vertikalachse einen Winkel < 90°, vorzugsweise ≤ 45° oder ≤ 25° einschließt. - Die Verriegelungseinrichtung 54 kann dazu ausgebildet sein, das Hubelement 34 in einer Position zu verriegeln, in der die Reinigungskappe 26 in ihrer Position direkt unterhalb des Füllorgans 12 positioniert ist. Bevorzugt ist die Verriegelungseinrichtung 54 eine mechanische Verriegelungseinrichtung.
- Beispielhaft zeigen die
Figuren 8 und9 die Verriegelungseinrichtung 54 in einer Entriegelungs- bzw. Freigabestellung. In derFigur 10 ist die Verriegelungseinrichtung 54 in einer Verriegelungsstellung gezeigt. - Die Verriegelungseinrichtung 54 kann ein (z. B. horizontal) bewegbares Verriegelungselement 56 aufweisen. Das Verriegelungselement 56 kann zum Verriegeln des Hubelements 34 in einer angehobenen Position des Hubelements 34, z. B. wenn die Reinigungskappe 26 in ihrer Position direkt unterhalb des Füllorgans 12 positioniert ist, verriegeln. Das Verriegelungselement 56 kann bspw. ein Blech oder ein (z. B. Metall-) Block sein.
- Bevorzugt kann das Verriegelungselement 56 das Hubelement 34 an einem Absatz (bzw. einer Schulter) 58 des Hubelements 34 verriegeln. Das Verriegelungselement 56 kann als ein Anschlag für den Absatz 58 dienen. In der Verriegelungsstellung können der Absatz 58 und das Verrieglungselement 56 einander kontaktieren (siehe
Figur 10 ). In der Freigabestellung können der Absatz 58 und das Verrieglungselement 56 voneinander beanstandet sein (sieheFiguren 8 und9 ). - Beispielsweise kann das Hubelement 34 zwei längliche Kolbenabschnitte aufweisen. Die beiden Kolbenabschnitte können horizontal und vertikal versetzt zueinander angeordnet sein. Über den Absatz 58 können die beiden Kolbenabschnitte des Hubelements 38 miteinander verbunden sein. Beispielsweise kann das Hubelement 34 stufenförmig mit dem Absatz 58 zwischen den beiden Kolbenabschnitten ausgeführt sein. Das Hubelement 34 kann vorzugsweise mehrteilig sein, mit zwei Kolbenabschnittsteilen, die über ein Verbindungsteil mit dem Absatz 58 miteinander verbunden und aneinander befestigt sind.
- Alternativ kann das Hubelement 34 bspw. als eine (einzelne) durchgängige Kolbenstange ausgebildet sein. Der Absatz 58 könnte vorzugsweise als ein Ausschnitt, z. B. eine Nut, ein Loch oder eine Bohrung, in der Kolbenstange gebildet sein.
- Bevorzugt kann das Verriegelungselement 56 zum Einnehmen der Verriegelungsstellung elastisch vorgespannt sein. Beispielsweise kann ein elastisches Element 60, wie eine (z. B. Schrauben- und/oder Druck-) Feder, das Verriegelungselement 56 zum Einnehmen der Verriegelungsstellung elastisch vorspannen.
- Beispielsweise kann ein Ende des elastischen Elements 60 in einem Trägerkörper 62 aufgenommen sein. Ein entgegengesetztes Ende des elastischen Elements 60 kann mit dem Verriegelungselement 56 verbunden sein, z. B. dieses tragen. Der Trägerkörper 62 kann bspw. an dem Zylinder 36 angebracht sein. Eine Längsachse des elastischen Elements 60 kann sich bevorzugt horizontal erstrecken.
- Das Hubelement 34 kann entlang einer Stirnseite des Verriegelungselements 56 gleiten. Sobald das Hubelement 34 eine angehobene Position erreicht hat (z. B. bewirkt durch den Hubkurvenfolger 50 und die Hubkurve) kann der Absatz 58 das Verriegelungselement 56 passiert haben. Eine Oberkante des Verriegelungselements 56 kann dann unterhalb von dem Absatz 58 positioniert sein. Das Verriegelungselement 56 kann dann (z. B. bewirkt durch das elastische Element 60) unter den Absatz 58 zum Einnehmen der Verriegelungsstellung bewegt und damit das Hubelement 34 in der angehobenen Position verriegelt werden. Entsprechend kann die Reinigungskappe 26 in ihrer Position direkt unterhalb des Füllorgans 12 (siehe
Figur 2 ) verriegelt werden. - Zum Freigeben der Verriegelungseinrichtung 54 sind unterschiedliche Techniken denkbar. Beispielsweise kann die Verriegelungseinrichtung 54 zum Freigeben des Hubelements 34 mechanisch betätigbar sein.
- Die Verriegelungseinrichtung 54 kann bspw. ein bewegbares Entriegelungselement 64, z. B. eine Druckplatte, aufweisen. Das Entriegelungselement 64 kann in Wirkverbindung mit dem Verriegelungselement 56 zum Bewegen des Verrieglungselements 56 weg von der Verriegelungsstellung sein.
- Beispielsweise können das Entriegelungselement 64 und das Verrieglungselement 56 auf entgegengesetzten Umfangsseiten des Hubelements 34 angeordnet sein. Die Wirkverbindung zwischen dem Entriegelungselement 64 und dem Verrieglungselement 56 kann bspw. über eine klammerförmige oder gabelförmige Verbindung, die das Hubelement 34 umgeht, ausgebildet sein.
- Eine Bewegung des Entriegelungselements 64 in Richtung zu dem Trägerkörper 62 kann das Verriegelungselement 56 außer Kontakt von dem Absatz 58 bewegen, bis das Hubelement 34 das zurückbewegte Verriegelungselement 56 wieder zum Absenken passieren kann (z. B. unter Wirkung des elastischen Elements 52). Eine von dem Entriegelungselement 64 aufgebrachte Kraft kann bevorzugt die elastische Vorspannung des Verriegelungselements 56 durch das elastische Element 60 überwinden.
- Beispielsweise kann das Entriegelungselement 64 von einem stationären (z. B. Pneumatik- oder Elektro-) Aktor (nicht dargestellt) bewegbar sein. Der Aktor kann bspw. ein Steuerelement (z. B. Steuerkurve oder Rolle) ein- und ausfahren. Im aus- oder eingefahrenen Zustand des Aktors kann das Entriegelungselement 64 entlang des Steuerelements bei einer Drehung der Vorrichtung 10' entlanglaufen und von dem Steuerelement zum Bewegen des Verriegelungselements 56 zum Freigeben des Hubelements 34 weggedrückt werden.
- Die Erfindung ist nicht auf die vorstehend beschriebenen bevorzugten Ausführungsbeispiele beschränkt. Vielmehr ist eine Vielzahl von Varianten und Abwandlungen möglich, die ebenfalls von dem Erfindungsgedanken Gebrauch machen und deshalb in den Schutzbereich fallen. Insbesondere beansprucht die Erfindung auch Schutz für den Gegenstand und die Merkmale der Unteransprüche unabhängig von den in Bezug genommenen Ansprüchen. Insbesondere sind die einzelnen Merkmale des unabhängigen Anspruchs 1 jeweils unabhängig voneinander offenbart. Zusätzlich sind auch die Merkmale der Unteransprüche unabhängig von sämtlichen Merkmalen des unabhängigen Anspruchs 1 und beispielsweise unabhängig von den Merkmalen bezüglich des Vorhandenseins und/oder der Konfiguration des Füllorgans, des Behälterträgers, der Reinigungskappe und/oder des Wechselsystems des unabhängigen Anspruchs 1 offenbart. Alle Bereichsangaben hierin sind derart offenbart zu verstehen, dass gleichsam alle in den jeweiligen Bereich fallenden Werte einzeln offenbart sind, z. B. auch als jeweils bevorzugte engere Außengrenzen des jeweiligen Bereichs.
-
- 10
- Vorrichtung zum Füllen von Behältern
- 12
- Füllorgan
- 14
- Oberteil
- 16
- Zentrierglocke
- 18
- Vertikalführung
- 20
- Füllhöhensonde
- 22
- Hubsystem
- 24
- Behälterträger
- 26
- Reinigungskappe
- 28
- Kappenmündung
- 30
- Wechselsystem
- 32
- Hubeinrichtung
- 34
- bewegbares Hubelement
- 36
- Zylinder
- 38
- Schwenkeinrichtung
- 40
- Gehäuse
- 42
- Hebelelement
- 44
- Führungskurve
- 45
- Auslassende
- 46
- Führungselement
- 48
- Schwenkarm
- 50
- Hubkurvenfolger
- 52
- elastisches Element
- 54
- Verriegelungseinrichtung
- 56
- Verriegelungselement
- 58
- Absatz
- 60
- elastisches Element
- 62
- Trägerkörper
- 64
- Entriegelungselement
- A
- Zentraldrehachse
- S1-S4
- Schwenkachse
Claims (17)
- Vorrichtung (10), vorzugsweise Rundläufer-Vorrichtung, zum Füllen von Behältern, wobei die Vorrichtung (10) aufweist:ein Füllorgan (12) zum Füllen eines Behälters;einen Behälterträger (24), vorzugsweise Behälterstützplatte, zum Abstützen des Behälters beim Füllen des Behälters;eine Reinigungskappe (26), vorzugsweise CIP-Reinigungskappe, zum Abdecken des Füllorgans (12) beim Reinigen des Füllorgans (12); undein Wechselsystem (30), das ausgebildet ist, zum Reinigen des Füllorgans (12) den Behälterträger (24) aus einer Position direkt unterhalb des Füllorgans (12) wegzubewegen, vorzugsweise wegzuschwenken, und die Reinigungskappe (26) zu einer Position direkt unterhalb des Füllorgans (12) hinzubewegen, vorzugsweise hinzuschwenken, besonders bevorzugt um mehrere voneinander beabstandete Schwenkachsen (S1, S2, S3, S4).
- Vorrichtung (10) nach Anspruch 1, wobei:
das Wechselsystem (30) ferner dazu ausgebildet ist, eine Bewegung des Behälterträgers (24) und eine Bewegung der Reinigungskappe (26) miteinander, vorzugsweise mechanisch, zu koppeln, wobei vorzugsweise:ein Wegbewegen des Behälterträgers (24) aus seiner Position direkt unterhalb des Füllorgans (12) und ein Hinbewegen der Reinigungskappe (26) zu ihrer Position direkt unterhalb des Füllorgans (12) miteinander, vorzugsweise mechanisch, gekoppelt sind; und/oderein Hinbewegen des Behälterträgers (24) zu seiner Position direkt unterhalb des Füllorgans (12) und ein Wegbewegen der Reinigungskappe (26) aus ihrer Position direkt unterhalb des Füllorgans (12) miteinander, vorzugsweise mechanisch, gekoppelt sind. - Vorrichtung (10) nach Anspruch 1 oder Anspruch 2, wobei:
das Wechselsystem (30) eine Schwenkeinrichtung (38), vorzugsweise mit mehreren Schwenkachsen (S1, S2, S3, S4), und/oder eine Hubeinrichtung (32) mit einem bewegbaren Hubelement (34), vorzugsweise Hubkolben, zum Bewegen des Behälterträgers (24) und der Reinigungskappe (26) aufweist. - Vorrichtung (10) nach Anspruch 3, wobei:
die Schwenkeinrichtung (38) das bewegbare Hubelement (34) mit dem Behälterträger (24) und der Reinigungskappe (26) verbindet. - Vorrichtung (10) nach Anspruch 3 oder Anspruch 4, wobei:
das Wechselsystem (30) ferner dazu ausgebildet ist, dass:- ein erster Abschnitt eines Hubs des bewegbaren Hubelements (34) ein Wegschwenken des Behälterträgers (24) aus seiner Position direkt unterhalb des Füllorgans (12) und ein Hinschwenken der Reinigungskappe (26) zu ihrer Position direkt unterhalb des Füllorgans (12) mittels der Schwenkeinrichtung (38) bewirkt; und- ein zweiter Abschnitt des Hubs, der an den ersten Abschnitt anschließt, eine Hubbewegung des Behälterträgers (24) und der Reinigungskappe (26) hin zu dem Füllorgan (12) bewirkt. - Vorrichtung (10) nach Anspruch 5, wobei:
das Füllorgan (12) eine Zentrierglocke (16) aufweist, in die eine Kappenmündung (28) der Reinigungskappe (26) einführbar ist und die vertikal geführt bewegbar ist zum vertikalen Führen des Behälterträgers (24) im zweiten Abschnitt des Hubs. - Vorrichtung (10) nach einem der Ansprüche 3 bis 6, wobei die Schwenkeinrichtung (38) aufweist:
ein Hebelelement (42), das:- an einem ersten Ende an einer Führungskurve (44), vorzugsweise Führungskurvennut, geführt ist;- an einem zweiten Ende an dem Behälterträger (24) angebracht ist; und- zwischen dem ersten Ende und dem zweiten Ende, vorzugsweise horizontal, schwenkbar mit dem bewegbaren Hubelement (34) der Hubeinrichtung (32) verbunden ist; und optional- an einem dritten Ende, vorzugsweise horizontal, schwenkbar mit der Reinigungskappe (26) verbunden ist. - Vorrichtung (10) nach Anspruch 7, wobei mindestens eines erfüllt ist von:die Führungskurve (44) ist in einem Gehäuseteil umfasst, vorzugsweise in einer Innenseite des Gehäuseteils;die Führungskurve (44) ist relativ zu einem stationären Teil, vorzugsweise Hubzylinder (36), der Hubeinrichtung (32) festgelegt;die Führungskurve (44) weist einen Stufenverlauf auf; unddie Führungskurve (44) weist einen ersten, im Wesentlichen vertikal verlaufenden Führungskurvenabschnitt (44A), einen daran anschließenden zweiten, im Wesentlichen schräg oder horizontal verlaufenden Führungskurvenabschnitt (44B) und einen daran anschließenden dritten, im Wesentlichen vertikal verlaufenden Führungskurvenabschnitt (44C), optional mit einem sich erweiternden Auslassende (45), auf.
- Vorrichtung (10) nach einem der Ansprüche 3 bis 8, wobei:
die Schwenkeinrichtung (38) einen Schwenkarm (48) aufweist, der:- an einem ersten Ende, vorzugsweise horizontal, schwenkbar mit dem bewegbaren Hubelement (34) der Hubeinrichtung (32) verbunden ist; und- an einem zweiten Ende, vorzugsweise horizontal, schwenkbar mit der Reinigungskappe (26) verbunden ist. - Vorrichtung (10) nach Anspruch 9 und einem der Ansprüche 7 oder 8, wobei:das Hebelelement (42) über eine Schwenkachse (S1) und der Schwenkarm (48) über eine dazu beabstandete, vorzugsweise parallele, Schwenkachse (S3) mit dem bewegbaren Hubelement (34) verbunden ist; und/oderdas Hebelelement (42) über eine Schwenkachse (S2) und der Schwenkarm (48) über eine dazu beabstandete, vorzugsweise parallele, Schwenkachse (S4) mit der Reinigungskappe (26) verbunden ist.
- Vorrichtung (10) nach einem der Ansprüche 3 bis 10, wobei:
die Hubeinrichtung (32) einen Hubkurvenfolger (50), vorzugsweise Rolle, zum Folgen einer Hubkurve aufweist, wobei der Hubkurvenfolger (50) mit dem Hubelement (34) zum vertikalen Bewegen, vorzugsweise Anheben, des Hubelements (34) wirkverbunden ist, vorzugsweise angeordnet an einem unteren Ende des Hubelements (34). - Vorrichtung (10) nach einem der Ansprüche 3 bis 11, ferner aufweisend:
eine, vorzugsweise mechanische, Verriegelungseinrichtung (54), die zum, vorzugsweise selbsttätigen, Verriegeln des Hubelements (34), wenn die Reinigungskappe (26) in ihrer Position direkt unterhalb des Füllorgans (12) positioniert ist, ausgebildet ist, wobei vorzugsweise mindestens eines erfüllt ist von:die Verriegelungseinrichtung (54) ist mechanisch zum Freigeben des Hubelements (34) betätigbar;das Hubelement (34) ist zum Absenken elastisch vorgespannt, vorzugsweise zum Hinbewegen des Behälterträgers (24) in seine Position direkt unterhalb des Füllorgans (12) und zum Wegbewegen der Reinigungskappe (26) aus ihrer Position direkt unterhalb des Füllorgans (12); unddas Hubelement (34) ist von einem Verriegelungselement (56) der Verriegelungseinrichtung (54) an einem Absatz (58) des Hubelements (34) verriegelbar. - Vorrichtung (10) nach einem der vorherigen Ansprüche, wobei mindestens eines erfüllt ist von:das Wechselsystem (30) ist ferner dazu ausgebildet, zum Beenden des Reinigens des Füllorgans (12) den Behälterträger (24) zu seiner Position direkt unterhalb des Füllorgans (12) hinzubewegen, vorzugsweise hinzuschwenken, und die Reinigungskappe (26) aus ihrer Position direkt unterhalb des Füllorgans (12) wegzubewegen, vorzugsweise wegzuschwenken und/oder in eine Überkopfausrichtung der Reinigungskappe (26);das Wechselsystem (30) weist eine gemeinsame und/oder einzige Antriebsquelle zum Bewegen von sowohl dem Behälterträger (24) aus seiner Position direkt unterhalb von dem Füllorgan (12) als auch der Reinigungskappe (26) zu ihrer Position direkt unterhalb von dem Füllorgan (12) auf;das Wechselsystem (30) ist ferner dazu ausgebildet, die Reinigungskappe (26) über einen größeren Winkelbereich hin zu ihrer Position direkt unterhalb von dem Füllorgan (12) hinzuschwenken als den Behälterträger (24) aus seiner Position direkt unterhalb von dem Füllorgan (12) wegzuschwenken; undeine Nichtgebrauchsposition des Behälterträgers (24) und eine Nichtgebrauchsposition der Reinigungskappe (26) sind auf einander entgegengesetzten Seiten des Wechselsystems (30) angeordnet.
- Vorrichtung (10) nach einem der vorherigen Ansprüche, wobei:das Füllorgan (12) eine Füllhöhensonde (20) aufweist; unddie Reinigungskappe (26) zum Aufnehmen der Füllhöhensonde (20) dimensioniert ist; und optionaldas Wechselsystem (30) dazu ausgebildet ist, die Reinigungskappe (26) so zu bewegen, dass die Füllhöhensonde (20) zum Reinigen des Füllorgans (12) in die Reinigungskappe (26) eingeführt wird.
- Vorrichtung (10) nach einem der vorherigen Ansprüche, ferner aufweisend:
ein Hubsystem (22), das dazu ausgebildet ist, den Behälterträger (24), die Reinigungskappe (26) und das Wechselsystem (30) gemeinsam anzuheben und abzusenken. - Verfahren zum Betreiben einer Vorrichtung (10), vorzugsweise nach einem der vorherigen Ansprüche, zum Füllen von Behältern, wobei das Verfahren aufweist:
Wechseln zu einem Reinigungsbetriebsmodus der Vorrichtung (10) durch Wegbewegen, vorzugsweise Wegschwenken, eines Behälterträgers (24) aus einer Position direkt unterhalb von einem Füllorgan (12) und Hinbewegen, vorzugsweise Hinschwenken, einer Reinigungskappe (26), vorzugsweise um mehrere voneinander beabstandete Schwenkachsen (S1, S2, S3, S4), zu einer Position direkt unterhalb von dem Füllorgan (12) mittels eines Wechselsystems (30). - Verfahren nach Anspruch 16, ferner aufweisend mindestens eines von:Beenden des Reinigungsbetriebsmodus durch Hinbewegen, vorzugsweise Hinschwenken, des Behälterträgers (24) zu seiner Position direkt unterhalb von einem Füllorgan (12) und Wegbewegen, vorzugsweise Wegschwenken, der Reinigungskappe (26) aus ihrer Position direkt unterhalb von dem Füllorgan (12), vorzugsweise in eine Überkopfausrichtung der Reinigungskappe (26), mittels des Wechselsystems (30);Koppeln, vorzugsweise mechanisches Koppeln, des Wegbewegens, vorzugsweise Wegschwenkens, des Behälterträgers (24) aus seiner Position direkt unterhalb von dem Füllorgan (12) und des Hinbewegens, vorzugsweise Hinschwenkens, der Reinigungskappe (26) zu ihrer Position direkt unterhalb von dem Füllorgan (12) mittels des Wechselsystems (30);Koppeln, vorzugsweise mechanisches Koppeln, eines Hinbewegens, vorzugsweise Hinschwenkens, des Behälterträgers (24) zu seiner Position direkt unterhalb von dem Füllorgan (12) und eines Wegbewegens, vorzugsweise Wegschwenkens, der Reinigungskappe (26) aus ihrer Position direkt unterhalb von dem Füllorgan (12) mittels des Wechselsystems (30);vertikales Führen der Reinigungskappe (26) hin zu dem Füllorgan (12) mittels einer Zentrierglocke des Füllorgans (12);Eintauchen einer Füllhöhensonde (20) in die Reinigungskappe (26);Verriegeln der Reinigungskappe (26) in ihrer Position direkt unterhalb von dem Füllorgan (12) mittels einer, vorzugsweise mechanischen, Verriegelungseinrichtung (54), die bevorzugt ein Hubelement (34) einer Hubeinrichtung (32) des Wechselsystems (30) verriegelt; undelastisches Vorspannen eines Hubelements (34) einer Hubeinrichtung (32) des Wechselsystems (30) zum Absenken des Hubelements (34) zum Hinbewegen des Behälterträgers (24) zu seiner Position direkt unterhalb von dem Füllorgan (12) und zum Wegbewegens der Reinigungskappe (26) aus ihrer Position direkt unterhalb von dem Füllorgan (12).
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102023132947.2A DE102023132947A1 (de) | 2023-11-27 | 2023-11-27 | Vorrichtung zum Füllen von Behältern und Verfahren zum Betreiben der Vorrichtung |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| EP4559865A1 true EP4559865A1 (de) | 2025-05-28 |
Family
ID=93651361
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP24215228.8A Pending EP4559865A1 (de) | 2023-11-27 | 2024-11-25 | Vorrichtung zum füllen von behältern und verfahren zum betreiben der vorrichtung |
Country Status (3)
| Country | Link |
|---|---|
| EP (1) | EP4559865A1 (de) |
| CN (1) | CN120039812A (de) |
| DE (1) | DE102023132947A1 (de) |
Citations (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5247042U (de) | 1975-09-27 | 1977-04-02 | ||
| DE3722495A1 (de) | 1987-07-08 | 1989-01-19 | Holstein & Kappert Maschf | Fuell- und verschliessmaschine fuer gefaesse |
| DE4343425A1 (de) | 1993-12-18 | 1995-06-22 | Khs Masch & Anlagenbau Ag | Hubvorrichtung für eine Füllmaschine sowie Füllmaschine mit einer solchen Hubvorrichtung |
| EP0785134A2 (de) | 1996-01-16 | 1997-07-23 | Gruppo Bertolaso S.p.A. | Verfahren und Vorrichtung zum Desinfizieren von Füllmaschinen- und Systemen,insbesondere für Lebensmittel |
| EP1270498A1 (de) | 2001-06-22 | 2003-01-02 | Antonio Gallardo Gonzalez | Füllelement mit integrierter Reinigungsvorrichtung, zum Abfüllen von Flaschen oder anderen Behältern |
| JP2005035669A (ja) * | 2003-06-27 | 2005-02-10 | Toyo Food Equipment Co Ltd | ボトル搬送装置におけるボトルのネックの保持器 |
| DE102006013367A1 (de) | 2006-03-23 | 2007-09-27 | Gasti Verpackungsmaschinen Gmbh | Verfahren und Vorrichtung zum Reinigen einer Becherfüllmaschine |
| DE102010051450A1 (de) * | 2010-11-17 | 2012-05-24 | Khs Gmbh | Füllelement sowie Füllsystem oder Füllmaschine zum Freistrahlfüllen von Flaschen oder dergleichen Behältern |
| DE102011111496B3 (de) | 2011-08-30 | 2012-06-06 | Khs Gmbh | Hubelement mit ausfahrbarer Spülhülse |
| DE102012019161A1 (de) * | 2012-09-28 | 2014-04-03 | Khs Gmbh | Füllmaschine |
| DE102014117859A1 (de) | 2014-12-04 | 2016-06-09 | Krones Ag | Vorrichtung zum Anheben und Absenken eines Behälters in einer Getränkeabfüllanlage |
| EP2748102B1 (de) | 2011-08-23 | 2016-11-30 | KHS GmbH | Füllmaschine sowie verfahren zum steuern einer füllmaschine |
-
2023
- 2023-11-27 DE DE102023132947.2A patent/DE102023132947A1/de active Pending
-
2024
- 2024-11-21 CN CN202411670165.XA patent/CN120039812A/zh active Pending
- 2024-11-25 EP EP24215228.8A patent/EP4559865A1/de active Pending
Patent Citations (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5247042U (de) | 1975-09-27 | 1977-04-02 | ||
| DE3722495A1 (de) | 1987-07-08 | 1989-01-19 | Holstein & Kappert Maschf | Fuell- und verschliessmaschine fuer gefaesse |
| DE4343425A1 (de) | 1993-12-18 | 1995-06-22 | Khs Masch & Anlagenbau Ag | Hubvorrichtung für eine Füllmaschine sowie Füllmaschine mit einer solchen Hubvorrichtung |
| EP0785134A2 (de) | 1996-01-16 | 1997-07-23 | Gruppo Bertolaso S.p.A. | Verfahren und Vorrichtung zum Desinfizieren von Füllmaschinen- und Systemen,insbesondere für Lebensmittel |
| EP1270498A1 (de) | 2001-06-22 | 2003-01-02 | Antonio Gallardo Gonzalez | Füllelement mit integrierter Reinigungsvorrichtung, zum Abfüllen von Flaschen oder anderen Behältern |
| JP2005035669A (ja) * | 2003-06-27 | 2005-02-10 | Toyo Food Equipment Co Ltd | ボトル搬送装置におけるボトルのネックの保持器 |
| DE102006013367A1 (de) | 2006-03-23 | 2007-09-27 | Gasti Verpackungsmaschinen Gmbh | Verfahren und Vorrichtung zum Reinigen einer Becherfüllmaschine |
| DE102010051450A1 (de) * | 2010-11-17 | 2012-05-24 | Khs Gmbh | Füllelement sowie Füllsystem oder Füllmaschine zum Freistrahlfüllen von Flaschen oder dergleichen Behältern |
| EP2748102B1 (de) | 2011-08-23 | 2016-11-30 | KHS GmbH | Füllmaschine sowie verfahren zum steuern einer füllmaschine |
| DE102011111496B3 (de) | 2011-08-30 | 2012-06-06 | Khs Gmbh | Hubelement mit ausfahrbarer Spülhülse |
| DE102012019161A1 (de) * | 2012-09-28 | 2014-04-03 | Khs Gmbh | Füllmaschine |
| DE102014117859A1 (de) | 2014-12-04 | 2016-06-09 | Krones Ag | Vorrichtung zum Anheben und Absenken eines Behälters in einer Getränkeabfüllanlage |
Also Published As
| Publication number | Publication date |
|---|---|
| DE102023132947A1 (de) | 2025-05-28 |
| CN120039812A (zh) | 2025-05-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP0724540B1 (de) | Scherenhubtisch | |
| EP3592676B1 (de) | Greif- und transportvorrichtung | |
| DE102008022848B4 (de) | PET-Flaschengreifer | |
| DE102011111496B3 (de) | Hubelement mit ausfahrbarer Spülhülse | |
| EP0439689A1 (de) | Mischgranulator | |
| DE19512905A1 (de) | Vorrichtung zum Herausziehen oder Abdrehen von Verschlüssen von Gefäßen | |
| EP0671228A2 (de) | Transporteinrichtung für Werkstücke in einer Presse | |
| EP3442724B1 (de) | Verfahren und vorrichtung zum richten eines werkstücks | |
| DE2754009A1 (de) | Fahrzeug zum transportieren von lasten | |
| DE102004016838A1 (de) | Verfahren und Vorrichtung zum Ausrichten von Gefäßen für flüssige oder fließfähige Medien, insbesondere Getränke | |
| DE2000208C3 (de) | ||
| DE4215795C1 (de) | Biegerichtmaschine | |
| DE3617309C2 (de) | ||
| EP4559865A1 (de) | Vorrichtung zum füllen von behältern und verfahren zum betreiben der vorrichtung | |
| EP1461255B1 (de) | Aufnahmevorrichtung für einen behälter und ein verfahren zum fixieren eines behälters | |
| DE3626008A1 (de) | Vorrichtung zum verschliessen von flaschen | |
| DE3605482A1 (de) | Reinigungseinrichtung fuer ventile an einer abfuellvorrichtung | |
| EP1340667B1 (de) | Vorrichtung zum Aufnehmen und/oder Transportieren wenigstens eines Funktionsteils einer technischen Einrichtung | |
| DE2520231C3 (de) | Greiferstange für bogenverarbeitende Maschinen | |
| DE69419103T2 (de) | Verstellbare Behälterrückführung für ein Hebesystem mit veränderlichem Hub in einer Verpackungsmaschine | |
| DE4114025C1 (en) | Labelling machine with work retaining plate(s) - has plunger inner and outer parts, between which is releasable lock | |
| EP0719727B1 (de) | Vorrichtung zum Verschliessen von Behältern, insbesondere Zylinderampullen, Vials o.ä. mit Verschlusskappen | |
| DE102020208430B4 (de) | Schmiedemaschinen-Belade- und -Entladevorrichtung | |
| CH687442A5 (de) | Einrichtung zum Reinigen von Gebinden. | |
| EP4484358A1 (de) | Vorrichtung zum halten eines behälters und verschliessvorrichtung |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN PUBLISHED |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC ME MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20251125 |