JP2004010308A - ごみクレ−ンバケットの巻上装置および巻上装置を使用した傾斜面のごみ掴み取り方法 - Google Patents
ごみクレ−ンバケットの巻上装置および巻上装置を使用した傾斜面のごみ掴み取り方法 Download PDFInfo
- Publication number
- JP2004010308A JP2004010308A JP2002168978A JP2002168978A JP2004010308A JP 2004010308 A JP2004010308 A JP 2004010308A JP 2002168978 A JP2002168978 A JP 2002168978A JP 2002168978 A JP2002168978 A JP 2002168978A JP 2004010308 A JP2004010308 A JP 2004010308A
- Authority
- JP
- Japan
- Prior art keywords
- bucket
- garbage
- inclined surface
- wire rope
- gripping claw
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images





Landscapes
- Control And Safety Of Cranes (AREA)
Abstract
【課題】傾斜面のごみをバケットのワイヤロ−プに過大な張力を発生させず、かつ能率よく掴み取る。
【解決手段】天井走行クレ−ンに積載され、ごみクレ−ンバケット7の左右に連結されたワイヤロ−プ6aを、別々の巻取ドラム1Aおよび1Bに巻き取り、前記ごみバケット7を左右のバランスとりながら昇降させるごみクレ−ンバケットの巻上装置において、前記別々の巻取ドラム1Aおよび1Bの駆動を、それぞれ単独の駆動手段2aおよび2bで行うようにしたことを特徴とするごみクレ−ンバケットの巻上装置。
【選択図】 図1
【解決手段】天井走行クレ−ンに積載され、ごみクレ−ンバケット7の左右に連結されたワイヤロ−プ6aを、別々の巻取ドラム1Aおよび1Bに巻き取り、前記ごみバケット7を左右のバランスとりながら昇降させるごみクレ−ンバケットの巻上装置において、前記別々の巻取ドラム1Aおよび1Bの駆動を、それぞれ単独の駆動手段2aおよび2bで行うようにしたことを特徴とするごみクレ−ンバケットの巻上装置。
【選択図】 図1
Description
【0001】
【産業上の利用分野】
この発明は、ごみ焼却施設において使用されるごみクレ−ンバケットの巻上装置および巻上装置を使用した傾斜面のごみ掴み取り方法に関する。
【0002】
【従来の技術】
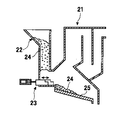
図4に示すように、ごみ焼却炉21には、ごみ投入ホッパー22が設置され、焼却されるごみは、ごみ投入ホッパー22が設置されている建屋の天井部分を走行するごみクレ−ンに装備されたごみクレ−ンバケット(以下、単にバケットという)により、ごみ集積場所からごみ投入ホッパー22まで運ばれ、投入される。
【0003】
そして、ごみ投入ホッパー22に投入されたごみ24は、ごみ投入ホッパー22の底部に設けられたごみ供給装置23により、焼却炉21の火格子25上に押し出され、焼却される。
【0004】
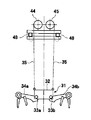
ごみ投入ホッパー22にごみ24を投入するためのごみクレ−ンバケット31は、図5に示すように、ごみクレ−ンによりワイヤロ−プを介して吊り下げられるバケットガ−ダ−32と、バケットガ−ダ−32の左右に一定距離をおいて平行に設けられた1対のピン33aおよび33bと、1対のピン33aおよび33bのそれぞれに、回動可能に接続された掴み爪34aおよび34bと、掴み爪34aおよび34bをお互いに閉じる方向または開く方向に回動させる開閉機構(図示せず)とから構成されている。
【0005】
そして、バケット31の昇降は、バケットのバケットガ−ダ−32の四隅に接続された4本のワイヤロ−プ35を、ごみクレ−ンの巻上装置により巻き上げおよび巻き下げることにより行なわれる。その巻上装置を図6に示す。図6(a)は巻上装置の平面図、図6(b)は巻上装置の正面図である。
【0006】
図6において、41は巻上電動機、42は巻上ブレ−キ、43は巻上減速機、44、45は巻上ドラム、46はパルス発信器である。巻上ドラム44には、バケットの掴み爪34a側に接続した2本のワイヤロ−プ35が巻き取られており、巻上ドラム45には、バケットの掴み爪34b側に接続した2本のワイヤロ−プ35が巻き取られており、バケットの昇降時に、同じ掴み爪側の2本のワイヤロ−プは同じ速度で昇降できるようになっている。これは、同じ掴み爪側の2本のワイヤロ−プの昇降速度が異なることに起因して、バケットが捩れ(回転)ないようにするためである。
【0007】
これら巻上装置は、クレ−ンの横行台車(クラブトロリ−)46上に設置され、横行台車(クラブトロリ−)46と巻上装置との間には、荷重検出器(ロ−ドセル)48が四隅に取付けられおり、バケット31がごみを何トン掴んだかの信号を出力するようになっている。図6中、符号47は横行台車46および巻上装置を動かすための横行車輪である。
【0008】
巻上電動機41を駆動させると、その回転は巻上減速機43を経由して、巻上ドラム44および45を同時に反対方向に回転させる。そして、巻き上げを行なうときには、巻上ドラム44および巻上ドラム45が、それぞれワイヤロ−プ35を内側に巻き込むように回転し、逆に巻き下げを行なうときには、巻上ドラム44および巻上ドラム45が、それぞれワイヤロ−プ35を外側に巻き戻すように回転する。
【0009】
バケット31によりごみ24を掴み取るときには、上述した巻上装置によりワイヤロ−プ35を巻き下げ、ごみ24の山にバケット31を着地させた後、バケット31に内臓された開閉機構により、バケット31の掴み爪34aおよび34bを閉じさせてごみ24を掴み取る。
【0010】
なお、バケット31の着地は、荷重検出器48により、その検出値がバケット31の自重以下になったとき、すなわち、ワイヤロ−プ35に張力が掛からず、バケット31が着地したことによるワイヤロ−プ35のたるんだ瞬間を検知して判断する。
【0011】
そして、バケット31を所定の高さまで上昇させ、バケット31を前記ごみ投入ホッパー22まで移動させ、前記開閉機構によりバケット31の掴み爪34aおよび34bを開いて、ごみ24を投入ホッパー22に投入する。
【0012】
【発明が解決しようとする課題】
上述した従来のごみ投入用のバケットで、ごみを掴み取るに際しては、次のような問題点がある。
【0013】
焼却炉で焼却する前のごみは、焼却工場に設けられたコンクリ−ト製のごみピットに収容されているが、収容されたごみの山は必ずしも平らにはならず、特に外部からごみを運搬してくるごみ運搬車が、ごみをごみピットに投入する付近のごみの山は、傾斜した状態となっている。
【0014】
図7は上述したような傾斜したごみの山にバケットを着地させ、ごみを掴みとるまでの手順を示す図である。図7(a)は、前述した巻上装置の巻上ドラム44および45を矢印の方向に回転させて、それぞれの巻上ドラムに巻き取られているワイヤロ−プ35aおよび35bを巻き戻して、掴み爪34aおよび34bを開いている状態のバケット31を、ごみの山に着地させる直前の状態を示す。
【0015】
図7(b)は、ごみ24の山の山側に掴み爪34aが着地し、かつ掴み爪34bをごみ24の山の谷側に着地させようとしている状態を示す。バケット31でごみ24を掴むためには、バケット31を完全に着地させ、その重量でごみ24の山に両方の掴み爪を食い込ませた上で、掴み爪を閉じる必要がある。完全に着地していない状態で掴み爪を閉じても、定められた量のごみ24を掴み取ることはできない。
【0016】
掴み爪34aが着地している状態で、さらに掴み爪34bを着地させるために、さらにワイヤロ−プ35aおよび35bを巻き戻すので、すでに着地している掴み爪34a側のワイヤロ−プ35aは、図に示すようなたるみ(たるみ部をAで示す)が発生する。
【0017】
ごみ24を定められた量掴むために、さらにワイヤロ−プ35aおよび35bを巻き戻していくと、図7(c)に示すように、バケット31は荷重検出器48からの着地信号が出るまでは、ごみ24の山の傾斜に沿って谷側に滑り落ちる。このため、たるんでいたワイヤロ−プ35aが急に引張られて、ワイヤロ−プ35aには大きな張力が発生する。
【0018】
従来の巻上装置でバケット31の昇降を毎日行っていると、上述したような張力が繰り返し作用し、ワイヤロ−プの寿命が著しく低下し、バケットとの接続部近傍で切断する可能性が高まってくる。また、バケット31が滑り落ちるので、作業能率も低下する。
【0019】
この発明は、上述したような従来技術の問題点を解消するためになされたものであり、ごみの山に傾斜面が形成されていても、バケットを吊っているワイヤロ−プに繰り返し張力が作用せず、かつバケットが傾斜面で滑り落ちないので、作業能率が向上するごみバクレ−ンケットの巻上装置を提供することを目的としている。
【0020】
【課題を解決するための手段】
この発明に係るごみクレ−ンバケットの巻上装置は、天井走行クレ−ンに積載され、ごみクレ−ンバケットの左右に連結されたワイヤロ−プを、別々の巻取ドラムに巻き取り、前記ごみバケットを左右のバランスとりながら昇降させるごみクレ−ンバケットの巻上装置において、前記別々の巻取ドラムの駆動を、それぞれ単独の駆動手段で行うようにしたものである。
【0021】
本発明に係るごみクレ−ンバケットの巻上装置は、ごみクレ−ンバケットの左右に連結されたワイヤロ−プを、それぞれ単独に巻き取ることができるので、ごみの山に傾斜面が形成されていても、傾斜面の傾斜に合わせて、ごみクレ−ンバケットの左右の掴み爪を着地させることができる。
【0022】
また、ごみクレ−ンバケットの左右の掴み爪を、ごみの傾斜面と逆の傾斜となるように傾けることにより、傾斜面を水平にならすことができる。
【0023】
また、この発明に係る傾斜面のごみ掴み取り方法は、次の(1)〜(4)の工程でごみを掴み取るものである。
(1)傾斜面の山側に位置する前記ごみクレ−ンバケットの掴み爪が、前記傾斜面に着地するまで、山側に位置する掴み爪と谷側に位置する掴み爪との高さを同じ高さに保持しながら、ごみクレ−ンバケットのワイヤロ−プを巻き下げ、山側に位置する掴み爪が傾斜面に着地したときに、山側に位置する掴み爪側のワイヤロ−プの巻き下げを停止する工程。
(2)山側に位置する掴み爪側のワイヤロ−プの巻き下げを停止した状態で、傾斜面の谷側に位置するごみクレ−ンバケットの掴み爪が、前記傾斜面に着地するまで、谷側に位置する掴み爪側のワイヤロ−プの巻き下げる工程。
(3)着地した谷側に位置する掴み爪側のワイヤロ−プを巻き上げ、同時に山側に位置する掴み爪をごみの山に食い込ませ、かつ掴み爪を閉じる動作も併用して、ごみの傾斜面を水平にならす工程
(4)ごみがほぼ平らになった後で、山側および谷側のワイヤロ−プの均衡を図った後、両方の掴み爪を閉じてごみを掴み、ごみクレ−ンバケットを巻き上げる工程。
【0024】
この発明に係る傾斜面のごみ掴み取り方法においては、上記(1)〜(4)の工程でごみを掴み取るので、バケットがごみの山の傾斜面を滑り落ちて、たるんだワイヤロ−プに大きな張力が発生することがないので、ワイヤロ−プの寿命を延ばすことができる。
【0025】
また、ごみクレ−ンバケットが傾斜面に沿って滑り落ちることがないので、ごみを掴み取る作業の作業能率が向上する。
【0026】
【発明の実施の形態】
本発明の実施の形態を図面を参照して説明する。図1は本発明のごみクレ−ンバケットの巻上装置の説明図であり、(a)は巻上装置の平面図であり、(b)は巻上装置の巻上ドラムに巻き取られるごみクレ−ンバケットの正面図である。
【0027】
図において、1A、1Bは巻上ドラム、2a、2bは巻上電動機、3a、3bは減速機、4a、4bは巻上ブレ−キ、5a、5bはパルス発信器、6a、6bはワイヤロ−プ、7はバケット、8はバケットガ−ダ−、9a、9bはバケットの掴み爪、10a、10bは荷重検出器(ロ−ドセル)である。
【0028】
この巻上装置は、バケット7のバケットガ−ダ−8を吊り下げているワイヤロ−プのうち、左側の掴み爪9aに近い側のワイヤロ−プ6a(図1では1本しか示していないが、実際には図面と直交する方向に一定間隔をおいて2本接続されている)を巻き上げる巻上ドラム1Aと、右側の掴み爪9bに近い側のワイヤロ−プ6b(ワイヤロ−プ6aと同じように、2本接続されている)を巻き上げる巻上ドラム1Bとを備えており、それぞれ単独に巻き上げ、巻き下げ動作が行えるようになっている。
【0029】
この巻上装置を詳述すると、巻上ドラム1Aは、巻上電動機2aを駆動させ、その回転を巻上減速機3aを経由して伝達することにより回転される。
巻上電動機2aは正転および逆転することが可能であるので、巻上ドラム1Aを正転および逆転させて、ワイヤロ−プ6aの巻上および巻き下げを行なうことができる。また、巻上ブレ−キ4aにより任意の高さにクレ−ンバケット7を保持することができる。
【0030】
巻上ドラム1Bは、巻上電動機2bを駆動させ、その回転を巻上減速機3bを経由して伝達することにより回転される。巻上電動機2bは正転および逆転することが可能であるので、巻上ドラム1Bを正転および逆転させて、ワイヤロ−プ6bの巻上および巻き下げを行なうことができる。また、巻上ブレ−キ4bにより任意の高さにバケット7を保持することができる。
【0031】
図2は、上述した本発明の巻上装置の制御系統図である。バケット7のバケットガ−ダ−内部に取付けた内部傾斜角センサ−11からの信号、巻上ドラム1Aのワイヤロ−プ6aの長さを検出するパルス発信器5aの信号、巻上ドラム1Bのワイヤロ−プ6bの長さを検出するパルス発信器5bの信号、および荷重検出器10a、10bの荷重信号が、それぞれごみクレ−ンのシステム制御盤12に送られる。
【0032】
そして、内部傾斜角センサ−11からの信号により、バケット7の傾き状態を把握し、巻上ドラム1Aおよび1Bのうちのどの巻上ドラムを回転させるかを判断し、巻上電動機2aまたは2bに必要な指示が与えられる。
【0033】
同時に、左右それぞれのワイヤロ−プ6aおよび6bの繰り出し長さを、パルス発信器5aおよび5bからの信号により把握し、巻上の停止および回転するドラムの切替え等の制御が行なわれる。
【0034】
次に、上述した巻上装置を使用して、傾斜面が形成されたごみの山から、バケット7によりごみを掴み取る方法を、図3により説明する。
(1)図3(a)に示すように、山側の掴み爪9aがごみの山100に着地した時に(荷重検出器10a、10bの荷重信号が、バケット7の自重よりも軽くなったことにより検知した時に)、巻上ドラム1Aの巻き下げ方向の回転を停止させて、ワイヤロ−プ6aがたるまないようにする。
(2)図3(b)に示すように、山側の巻上ドラム1Aの巻き下げ方向の回転を停止させた後も、谷側の巻上ドラム1Bの巻き下げ方向の回転を継続させて、谷側の掴み爪9bをごみの山100に着地させ、巻上ドラム1Bの巻き下げ方向の回転を停止させる。
(3)図3(c)に示すように、谷側の巻上ドラム1Bを巻き上げ方向に回転させて、着地した谷側に位置する掴み爪9b側のワイヤロ−プ6bを巻き上げる。
(4)同時に、掴み爪の閉じる動作も併用して、ごみ100をくずす作業を行い、図3(d)に示すように、ごみ100の傾斜面が水平にならされる。
(5)ごみが平らになった後で、山側、谷側のワイヤロ−プ6aおよび6b
の均衡を図った後、掴み9aおよび9bを閉じてごみを掴み、クレ−ンバケット7を巻き上げる。
【0035】
【発明の効果】
本発明により、バケットがごみの山の傾斜面を滑り落ちて、たるんだワイヤロ−プに過大な張力が発生することがないので、ごみクレ−ンバケットのワイヤロ−プの寿命が延びるとともに、ごみを掴み取る作業の作業能率も向上する。
【図面の簡単な説明】
【図1】本発明のごみクレ−ンバケットの巻上装置の説明図であり、(a)は巻上装置の平面図であり、(b)は巻上装置の巻上ドラムに巻き取られるごみクレ−ンバケットの正面図である。
【図2】本発明の巻上装置の制御系統図である。
【図3】(a)〜(d)は本発明の傾斜面のごみ掴み取り方法の工程を示す図である。
【図4】ごみ焼却炉の構成を示す構成図である。
【図5】ごみクレ−ンバケットの正面図である。
【図6】従来のごみクレ−ンバケットの巻上装置の説明図であり、(a)は巻上装置の平面図、(b)は巻上装置の正面図である。
【図7】(a)〜(c)は従来の傾斜面のごみ掴み取り方法の工程を示す図である。
【符号の説明】
1A、1B 巻上ドラム
2a、2b 巻上電動機
3a、3b 減速機
4a、4b 巻上ブレ−キ
5a、5b パルス発信器
6a、6b ワイヤロ−プ
7 ごみクレ−ンバケット
8 吊下部材
9a、9b 掴み爪
10a、10b 荷重検出器
11 内部傾斜角センサ−
12 システム制御盤
【産業上の利用分野】
この発明は、ごみ焼却施設において使用されるごみクレ−ンバケットの巻上装置および巻上装置を使用した傾斜面のごみ掴み取り方法に関する。
【0002】
【従来の技術】
図4に示すように、ごみ焼却炉21には、ごみ投入ホッパー22が設置され、焼却されるごみは、ごみ投入ホッパー22が設置されている建屋の天井部分を走行するごみクレ−ンに装備されたごみクレ−ンバケット(以下、単にバケットという)により、ごみ集積場所からごみ投入ホッパー22まで運ばれ、投入される。
【0003】
そして、ごみ投入ホッパー22に投入されたごみ24は、ごみ投入ホッパー22の底部に設けられたごみ供給装置23により、焼却炉21の火格子25上に押し出され、焼却される。
【0004】
ごみ投入ホッパー22にごみ24を投入するためのごみクレ−ンバケット31は、図5に示すように、ごみクレ−ンによりワイヤロ−プを介して吊り下げられるバケットガ−ダ−32と、バケットガ−ダ−32の左右に一定距離をおいて平行に設けられた1対のピン33aおよび33bと、1対のピン33aおよび33bのそれぞれに、回動可能に接続された掴み爪34aおよび34bと、掴み爪34aおよび34bをお互いに閉じる方向または開く方向に回動させる開閉機構(図示せず)とから構成されている。
【0005】
そして、バケット31の昇降は、バケットのバケットガ−ダ−32の四隅に接続された4本のワイヤロ−プ35を、ごみクレ−ンの巻上装置により巻き上げおよび巻き下げることにより行なわれる。その巻上装置を図6に示す。図6(a)は巻上装置の平面図、図6(b)は巻上装置の正面図である。
【0006】
図6において、41は巻上電動機、42は巻上ブレ−キ、43は巻上減速機、44、45は巻上ドラム、46はパルス発信器である。巻上ドラム44には、バケットの掴み爪34a側に接続した2本のワイヤロ−プ35が巻き取られており、巻上ドラム45には、バケットの掴み爪34b側に接続した2本のワイヤロ−プ35が巻き取られており、バケットの昇降時に、同じ掴み爪側の2本のワイヤロ−プは同じ速度で昇降できるようになっている。これは、同じ掴み爪側の2本のワイヤロ−プの昇降速度が異なることに起因して、バケットが捩れ(回転)ないようにするためである。
【0007】
これら巻上装置は、クレ−ンの横行台車(クラブトロリ−)46上に設置され、横行台車(クラブトロリ−)46と巻上装置との間には、荷重検出器(ロ−ドセル)48が四隅に取付けられおり、バケット31がごみを何トン掴んだかの信号を出力するようになっている。図6中、符号47は横行台車46および巻上装置を動かすための横行車輪である。
【0008】
巻上電動機41を駆動させると、その回転は巻上減速機43を経由して、巻上ドラム44および45を同時に反対方向に回転させる。そして、巻き上げを行なうときには、巻上ドラム44および巻上ドラム45が、それぞれワイヤロ−プ35を内側に巻き込むように回転し、逆に巻き下げを行なうときには、巻上ドラム44および巻上ドラム45が、それぞれワイヤロ−プ35を外側に巻き戻すように回転する。
【0009】
バケット31によりごみ24を掴み取るときには、上述した巻上装置によりワイヤロ−プ35を巻き下げ、ごみ24の山にバケット31を着地させた後、バケット31に内臓された開閉機構により、バケット31の掴み爪34aおよび34bを閉じさせてごみ24を掴み取る。
【0010】
なお、バケット31の着地は、荷重検出器48により、その検出値がバケット31の自重以下になったとき、すなわち、ワイヤロ−プ35に張力が掛からず、バケット31が着地したことによるワイヤロ−プ35のたるんだ瞬間を検知して判断する。
【0011】
そして、バケット31を所定の高さまで上昇させ、バケット31を前記ごみ投入ホッパー22まで移動させ、前記開閉機構によりバケット31の掴み爪34aおよび34bを開いて、ごみ24を投入ホッパー22に投入する。
【0012】
【発明が解決しようとする課題】
上述した従来のごみ投入用のバケットで、ごみを掴み取るに際しては、次のような問題点がある。
【0013】
焼却炉で焼却する前のごみは、焼却工場に設けられたコンクリ−ト製のごみピットに収容されているが、収容されたごみの山は必ずしも平らにはならず、特に外部からごみを運搬してくるごみ運搬車が、ごみをごみピットに投入する付近のごみの山は、傾斜した状態となっている。
【0014】
図7は上述したような傾斜したごみの山にバケットを着地させ、ごみを掴みとるまでの手順を示す図である。図7(a)は、前述した巻上装置の巻上ドラム44および45を矢印の方向に回転させて、それぞれの巻上ドラムに巻き取られているワイヤロ−プ35aおよび35bを巻き戻して、掴み爪34aおよび34bを開いている状態のバケット31を、ごみの山に着地させる直前の状態を示す。
【0015】
図7(b)は、ごみ24の山の山側に掴み爪34aが着地し、かつ掴み爪34bをごみ24の山の谷側に着地させようとしている状態を示す。バケット31でごみ24を掴むためには、バケット31を完全に着地させ、その重量でごみ24の山に両方の掴み爪を食い込ませた上で、掴み爪を閉じる必要がある。完全に着地していない状態で掴み爪を閉じても、定められた量のごみ24を掴み取ることはできない。
【0016】
掴み爪34aが着地している状態で、さらに掴み爪34bを着地させるために、さらにワイヤロ−プ35aおよび35bを巻き戻すので、すでに着地している掴み爪34a側のワイヤロ−プ35aは、図に示すようなたるみ(たるみ部をAで示す)が発生する。
【0017】
ごみ24を定められた量掴むために、さらにワイヤロ−プ35aおよび35bを巻き戻していくと、図7(c)に示すように、バケット31は荷重検出器48からの着地信号が出るまでは、ごみ24の山の傾斜に沿って谷側に滑り落ちる。このため、たるんでいたワイヤロ−プ35aが急に引張られて、ワイヤロ−プ35aには大きな張力が発生する。
【0018】
従来の巻上装置でバケット31の昇降を毎日行っていると、上述したような張力が繰り返し作用し、ワイヤロ−プの寿命が著しく低下し、バケットとの接続部近傍で切断する可能性が高まってくる。また、バケット31が滑り落ちるので、作業能率も低下する。
【0019】
この発明は、上述したような従来技術の問題点を解消するためになされたものであり、ごみの山に傾斜面が形成されていても、バケットを吊っているワイヤロ−プに繰り返し張力が作用せず、かつバケットが傾斜面で滑り落ちないので、作業能率が向上するごみバクレ−ンケットの巻上装置を提供することを目的としている。
【0020】
【課題を解決するための手段】
この発明に係るごみクレ−ンバケットの巻上装置は、天井走行クレ−ンに積載され、ごみクレ−ンバケットの左右に連結されたワイヤロ−プを、別々の巻取ドラムに巻き取り、前記ごみバケットを左右のバランスとりながら昇降させるごみクレ−ンバケットの巻上装置において、前記別々の巻取ドラムの駆動を、それぞれ単独の駆動手段で行うようにしたものである。
【0021】
本発明に係るごみクレ−ンバケットの巻上装置は、ごみクレ−ンバケットの左右に連結されたワイヤロ−プを、それぞれ単独に巻き取ることができるので、ごみの山に傾斜面が形成されていても、傾斜面の傾斜に合わせて、ごみクレ−ンバケットの左右の掴み爪を着地させることができる。
【0022】
また、ごみクレ−ンバケットの左右の掴み爪を、ごみの傾斜面と逆の傾斜となるように傾けることにより、傾斜面を水平にならすことができる。
【0023】
また、この発明に係る傾斜面のごみ掴み取り方法は、次の(1)〜(4)の工程でごみを掴み取るものである。
(1)傾斜面の山側に位置する前記ごみクレ−ンバケットの掴み爪が、前記傾斜面に着地するまで、山側に位置する掴み爪と谷側に位置する掴み爪との高さを同じ高さに保持しながら、ごみクレ−ンバケットのワイヤロ−プを巻き下げ、山側に位置する掴み爪が傾斜面に着地したときに、山側に位置する掴み爪側のワイヤロ−プの巻き下げを停止する工程。
(2)山側に位置する掴み爪側のワイヤロ−プの巻き下げを停止した状態で、傾斜面の谷側に位置するごみクレ−ンバケットの掴み爪が、前記傾斜面に着地するまで、谷側に位置する掴み爪側のワイヤロ−プの巻き下げる工程。
(3)着地した谷側に位置する掴み爪側のワイヤロ−プを巻き上げ、同時に山側に位置する掴み爪をごみの山に食い込ませ、かつ掴み爪を閉じる動作も併用して、ごみの傾斜面を水平にならす工程
(4)ごみがほぼ平らになった後で、山側および谷側のワイヤロ−プの均衡を図った後、両方の掴み爪を閉じてごみを掴み、ごみクレ−ンバケットを巻き上げる工程。
【0024】
この発明に係る傾斜面のごみ掴み取り方法においては、上記(1)〜(4)の工程でごみを掴み取るので、バケットがごみの山の傾斜面を滑り落ちて、たるんだワイヤロ−プに大きな張力が発生することがないので、ワイヤロ−プの寿命を延ばすことができる。
【0025】
また、ごみクレ−ンバケットが傾斜面に沿って滑り落ちることがないので、ごみを掴み取る作業の作業能率が向上する。
【0026】
【発明の実施の形態】
本発明の実施の形態を図面を参照して説明する。図1は本発明のごみクレ−ンバケットの巻上装置の説明図であり、(a)は巻上装置の平面図であり、(b)は巻上装置の巻上ドラムに巻き取られるごみクレ−ンバケットの正面図である。
【0027】
図において、1A、1Bは巻上ドラム、2a、2bは巻上電動機、3a、3bは減速機、4a、4bは巻上ブレ−キ、5a、5bはパルス発信器、6a、6bはワイヤロ−プ、7はバケット、8はバケットガ−ダ−、9a、9bはバケットの掴み爪、10a、10bは荷重検出器(ロ−ドセル)である。
【0028】
この巻上装置は、バケット7のバケットガ−ダ−8を吊り下げているワイヤロ−プのうち、左側の掴み爪9aに近い側のワイヤロ−プ6a(図1では1本しか示していないが、実際には図面と直交する方向に一定間隔をおいて2本接続されている)を巻き上げる巻上ドラム1Aと、右側の掴み爪9bに近い側のワイヤロ−プ6b(ワイヤロ−プ6aと同じように、2本接続されている)を巻き上げる巻上ドラム1Bとを備えており、それぞれ単独に巻き上げ、巻き下げ動作が行えるようになっている。
【0029】
この巻上装置を詳述すると、巻上ドラム1Aは、巻上電動機2aを駆動させ、その回転を巻上減速機3aを経由して伝達することにより回転される。
巻上電動機2aは正転および逆転することが可能であるので、巻上ドラム1Aを正転および逆転させて、ワイヤロ−プ6aの巻上および巻き下げを行なうことができる。また、巻上ブレ−キ4aにより任意の高さにクレ−ンバケット7を保持することができる。
【0030】
巻上ドラム1Bは、巻上電動機2bを駆動させ、その回転を巻上減速機3bを経由して伝達することにより回転される。巻上電動機2bは正転および逆転することが可能であるので、巻上ドラム1Bを正転および逆転させて、ワイヤロ−プ6bの巻上および巻き下げを行なうことができる。また、巻上ブレ−キ4bにより任意の高さにバケット7を保持することができる。
【0031】
図2は、上述した本発明の巻上装置の制御系統図である。バケット7のバケットガ−ダ−内部に取付けた内部傾斜角センサ−11からの信号、巻上ドラム1Aのワイヤロ−プ6aの長さを検出するパルス発信器5aの信号、巻上ドラム1Bのワイヤロ−プ6bの長さを検出するパルス発信器5bの信号、および荷重検出器10a、10bの荷重信号が、それぞれごみクレ−ンのシステム制御盤12に送られる。
【0032】
そして、内部傾斜角センサ−11からの信号により、バケット7の傾き状態を把握し、巻上ドラム1Aおよび1Bのうちのどの巻上ドラムを回転させるかを判断し、巻上電動機2aまたは2bに必要な指示が与えられる。
【0033】
同時に、左右それぞれのワイヤロ−プ6aおよび6bの繰り出し長さを、パルス発信器5aおよび5bからの信号により把握し、巻上の停止および回転するドラムの切替え等の制御が行なわれる。
【0034】
次に、上述した巻上装置を使用して、傾斜面が形成されたごみの山から、バケット7によりごみを掴み取る方法を、図3により説明する。
(1)図3(a)に示すように、山側の掴み爪9aがごみの山100に着地した時に(荷重検出器10a、10bの荷重信号が、バケット7の自重よりも軽くなったことにより検知した時に)、巻上ドラム1Aの巻き下げ方向の回転を停止させて、ワイヤロ−プ6aがたるまないようにする。
(2)図3(b)に示すように、山側の巻上ドラム1Aの巻き下げ方向の回転を停止させた後も、谷側の巻上ドラム1Bの巻き下げ方向の回転を継続させて、谷側の掴み爪9bをごみの山100に着地させ、巻上ドラム1Bの巻き下げ方向の回転を停止させる。
(3)図3(c)に示すように、谷側の巻上ドラム1Bを巻き上げ方向に回転させて、着地した谷側に位置する掴み爪9b側のワイヤロ−プ6bを巻き上げる。
(4)同時に、掴み爪の閉じる動作も併用して、ごみ100をくずす作業を行い、図3(d)に示すように、ごみ100の傾斜面が水平にならされる。
(5)ごみが平らになった後で、山側、谷側のワイヤロ−プ6aおよび6b
の均衡を図った後、掴み9aおよび9bを閉じてごみを掴み、クレ−ンバケット7を巻き上げる。
【0035】
【発明の効果】
本発明により、バケットがごみの山の傾斜面を滑り落ちて、たるんだワイヤロ−プに過大な張力が発生することがないので、ごみクレ−ンバケットのワイヤロ−プの寿命が延びるとともに、ごみを掴み取る作業の作業能率も向上する。
【図面の簡単な説明】
【図1】本発明のごみクレ−ンバケットの巻上装置の説明図であり、(a)は巻上装置の平面図であり、(b)は巻上装置の巻上ドラムに巻き取られるごみクレ−ンバケットの正面図である。
【図2】本発明の巻上装置の制御系統図である。
【図3】(a)〜(d)は本発明の傾斜面のごみ掴み取り方法の工程を示す図である。
【図4】ごみ焼却炉の構成を示す構成図である。
【図5】ごみクレ−ンバケットの正面図である。
【図6】従来のごみクレ−ンバケットの巻上装置の説明図であり、(a)は巻上装置の平面図、(b)は巻上装置の正面図である。
【図7】(a)〜(c)は従来の傾斜面のごみ掴み取り方法の工程を示す図である。
【符号の説明】
1A、1B 巻上ドラム
2a、2b 巻上電動機
3a、3b 減速機
4a、4b 巻上ブレ−キ
5a、5b パルス発信器
6a、6b ワイヤロ−プ
7 ごみクレ−ンバケット
8 吊下部材
9a、9b 掴み爪
10a、10b 荷重検出器
11 内部傾斜角センサ−
12 システム制御盤
Claims (2)
- 天井走行クレ−ンに積載され、ごみクレ−ンバケットの左右に連結されたワイヤロ−プを、別々の巻取ドラムに巻き取り、前記ごみバケットを左右のバランスとりながら昇降させるごみクレ−ンバケットの巻上装置において、前記別々の巻取ドラムの駆動を、それぞれ単独の駆動手段で行うようにしたことを特徴とするごみクレ−ンバケットの巻上装置。
- 請求項1に記載のごみクレ−ンバケットの巻上装置を使用し、傾斜面のごみ掴み取り方法であり、次の(1)〜(4)の工程でごみを掴み取ることを特徴とする傾斜面のごみ掴み取り方法。
(1)傾斜面の山側に位置する前記ごみクレ−ンバケットの掴み爪が、
前記傾斜面に着地するまで、山側に位置する掴み爪と谷側に位置する掴み爪との高さを同じ高さに保持しながら、ごみクレ−ンバケットのワイヤロ−プを巻き下げ、山側に位置する掴み爪が傾斜面に着地したときに、山側に位置する掴み爪側のワイヤロ−プの巻き下げを停止する工程。
(2)山側に位置する掴み爪側のワイヤロ−プの巻き下げを停止した状態で、傾斜面の谷側に位置するごみクレ−ンバケットの掴み爪が、前記傾斜面に着地するまで、谷側に位置する掴み爪側のワイヤロ−プの巻き下げる工程。
(3)着地した谷側に位置する掴み爪側のワイヤロ−プを巻き上げ、同時に山側に位置する掴み爪をごみの山に食い込ませ、かつ掴み爪を閉じる動作も併用して、ごみの傾斜面を水平にならす工程
(4)ごみがほぼ平らになった後で、山側および谷側のワイヤロ−プの均衡を図った後、両方の掴み爪を閉じてごみを掴み、ごみクレ−ンバケットを巻き上げる工程。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002168978A JP2004010308A (ja) | 2002-06-10 | 2002-06-10 | ごみクレ−ンバケットの巻上装置および巻上装置を使用した傾斜面のごみ掴み取り方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002168978A JP2004010308A (ja) | 2002-06-10 | 2002-06-10 | ごみクレ−ンバケットの巻上装置および巻上装置を使用した傾斜面のごみ掴み取り方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2004010308A true JP2004010308A (ja) | 2004-01-15 |
Family
ID=30435740
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002168978A Pending JP2004010308A (ja) | 2002-06-10 | 2002-06-10 | ごみクレ−ンバケットの巻上装置および巻上装置を使用した傾斜面のごみ掴み取り方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2004010308A (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011058167A (ja) * | 2009-09-07 | 2011-03-24 | Penta Ocean Construction Co Ltd | 浚渫装置及び浚渫方法 |
| JP2014118230A (ja) * | 2012-12-13 | 2014-06-30 | Sumitomo Heavy Industries Material Handling Systems Co Ltd | 橋形アンローダおよびその制御方法 |
| CN112758831A (zh) * | 2021-03-02 | 2021-05-07 | 河南合力起重机械有限公司 | 一种自带成分检测的垃圾发电专用起重机 |
| CN115196507A (zh) * | 2022-03-23 | 2022-10-18 | 重庆钢铁股份有限公司 | 一种抓渣方法及抓渣行车 |
| JP7467792B2 (ja) | 2021-01-12 | 2024-04-16 | 株式会社日立プラントメカニクス | 自動クレーンによる掴み位置の修正方法 |
-
2002
- 2002-06-10 JP JP2002168978A patent/JP2004010308A/ja active Pending
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011058167A (ja) * | 2009-09-07 | 2011-03-24 | Penta Ocean Construction Co Ltd | 浚渫装置及び浚渫方法 |
| JP2014118230A (ja) * | 2012-12-13 | 2014-06-30 | Sumitomo Heavy Industries Material Handling Systems Co Ltd | 橋形アンローダおよびその制御方法 |
| JP7467792B2 (ja) | 2021-01-12 | 2024-04-16 | 株式会社日立プラントメカニクス | 自動クレーンによる掴み位置の修正方法 |
| CN112758831A (zh) * | 2021-03-02 | 2021-05-07 | 河南合力起重机械有限公司 | 一种自带成分检测的垃圾发电专用起重机 |
| CN115196507A (zh) * | 2022-03-23 | 2022-10-18 | 重庆钢铁股份有限公司 | 一种抓渣方法及抓渣行车 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN1071704C (zh) | 吊索抓斗控制系统 | |
| US5713477A (en) | Method and apparatus for controlling and operating a container crane or other similar cranes | |
| WO2014091780A1 (ja) | グラブバケットの昇降制御装置、グラブバケットの昇降制御装置を備えるアンローダ、及びグラブバケットの昇降制御方法 | |
| JP2004010308A (ja) | ごみクレ−ンバケットの巻上装置および巻上装置を使用した傾斜面のごみ掴み取り方法 | |
| JP2011213461A (ja) | 起重機 | |
| JP2006027783A (ja) | ごみ処理工場用自動クレーンの制御装置 | |
| JPS6054233B2 (ja) | 長尺物ハンドリング装置 | |
| JP4149082B2 (ja) | ごみピット内の溝掘り作業におけるクレーンの自動運転方法 | |
| CN217894942U (zh) | 一种乏燃料操作转运装置、以及后处理厂系统 | |
| JPS5832138B2 (ja) | 長尺物および枕木荷役装置 | |
| CN209505542U (zh) | 一种建筑材料搬运车 | |
| JP2004284736A (ja) | 天井クレーン | |
| JPH0789691A (ja) | 荷役機械における吊荷の振れ角検出方法 | |
| JP4619672B2 (ja) | 仮置ホッパー台車付天井クレーン | |
| JP2655789B2 (ja) | グラブバケットによるスクラップの自動ハンドリング方法 | |
| JPS5936095A (ja) | グラブバケツトの掴み量制御方法 | |
| JP2706745B2 (ja) | 地下掘削工事における資機材搬送装置 | |
| JPH08133669A (ja) | 天井クレーンの制御方法 | |
| JPS6010997B2 (ja) | バケットクレ−ンのバケット転倒防止方法 | |
| CN204184940U (zh) | 可移动升降式袋包堆垛机 | |
| CN216272736U (zh) | 炉渣自动行吊系统 | |
| CN213890028U (zh) | 垃圾多点位自动抓取控制系统 | |
| JPH01156204A (ja) | 自動倉庫 | |
| CN212050229U (zh) | 一种桥式抓斗起重机保护装置 | |
| JPH01247393A (ja) | ロープ式バケット付クレーンのバケット掴み方法及びその装置 |