JP2004013207A - 自動料金収受システムと車両管理方法 - Google Patents
自動料金収受システムと車両管理方法 Download PDFInfo
- Publication number
- JP2004013207A JP2004013207A JP2002161618A JP2002161618A JP2004013207A JP 2004013207 A JP2004013207 A JP 2004013207A JP 2002161618 A JP2002161618 A JP 2002161618A JP 2002161618 A JP2002161618 A JP 2002161618A JP 2004013207 A JP2004013207 A JP 2004013207A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- detector
- image processing
- image
- vehicle management
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images




















Landscapes
- Devices For Checking Fares Or Tickets At Control Points (AREA)
- Traffic Control Systems (AREA)
Abstract
【課題】車両検知器の誤検知による車両管理ズレを検出し、正しい車両管理状態に戻すことができるETCシステムを提供する。
【解決手段】通過車両を検知する複数の車両検知器S1、S2、S3、S4と、この通過車両を撮影する撮影手段20とを設け、複数の車両検知器S1、S2、S3、S4により検知された車両の同一性を、撮影手段20が撮影した映像を用いて判別するようにしている。このように、車両が通過したか否かのみを検出する車両検知器S1、S2、S3、S4の情報と撮影手段20の画像情報とを組み合わせることにより、それぞれの車両検知器S1、S2、S3、S4で検知された車両が同じものかどうかを識別することができ、車両管理ズレを修正することができる。
【選択図】 図1
【解決手段】通過車両を検知する複数の車両検知器S1、S2、S3、S4と、この通過車両を撮影する撮影手段20とを設け、複数の車両検知器S1、S2、S3、S4により検知された車両の同一性を、撮影手段20が撮影した映像を用いて判別するようにしている。このように、車両が通過したか否かのみを検出する車両検知器S1、S2、S3、S4の情報と撮影手段20の画像情報とを組み合わせることにより、それぞれの車両検知器S1、S2、S3、S4で検知された車両が同じものかどうかを識別することができ、車両管理ズレを修正することができる。
【選択図】 図1
Description
【0001】
【発明の属する技術分野】
本発明は、有料道路の自動料金収受(Electronic Toll Collection:ETC)システムと、そのシステム等での車両管理方法に関し、特に、料金所のETCレーン内の車両を的確に管理できるようにしたものである。
【0002】
【従来の技術】
近年、ETCシステムは、各所の有料道路に導入されており、このシステムを利用できる車両は、有料道路の料金所をノンストップで通過することができる。ETCシステムを利用するには、車両にETC車載器を取り付け、この車載器にETCカードを挿入して、料金所の通信用アンテナを備えたETCレーンのゲートを通過しなければならない。このETC車載器には、それを取り付けた車両の車種、長さ、幅、高さなどの情報が予め登録(セットアップ)されている。また、ETCカードは、クレジットカード会社が発行するETC専用のICカードなどであり、料金所通過の際に通過ゲートのIDや料金収受の記録が書き込まれる。 有料道路の通行料は車種ごとに設定されている。また、入口ゲートと出口ゲートとを設けて走行距離に応じた料金を算定する対距離制の方式と、一つのゲートで一定額を徴収する料金均一制の方式とがある。ゲートの構成は、その方式の違いや入口ゲート、出口ゲートにより異なり、また、立地条件によっても違っている。このゲートの一例を図19(斜視図)及び図20(平面図)に示している。 このゲートは、ETC車載器との無線通信に使用するアンテナ10をレーン上に備え、アイランド17には、複数の投光器及び受光器の対から成り、光線の遮断によって車両の通過を感知する第1車両検知器S1、第2車両検知器S2、第3車両検知器S3及び第4車両検知器S4と、レーンを通過する車両14−1に対して「通行可」または「停車」を表示する路側表示器11と、車両14−1がETC車載器を装備したETC車両であるときはバーを開き、非ETC車両であるときはバーを閉じたままとする遮断機12と、アンテナ10を通じてETC車載器と無線通信を行う路側無線装置16を内包し、レーンの動作を制御する車線制御装置15と、収受員が入るブース13とを備えている。
【0003】
図21は各部の関係をブロック図で示している。車線制御装置15は、各車両検知器S1〜S4及び路側無線装置16の検知情報を基に、車両14−1がETC車両であるか非ETC車両であるかを識別し、ETC車両であるときは、必要な課金処理を行い、路側表示器11に「通行可」を表示して遮断機12を開く。また、非ETC車両であるときは、路側表示器11に「停車」を表示し、遮断機12は閉じたままとする。なお、非ETC車両の場合は、収受員が料金の徴収等を行った後、手動で遮断機12を開く。また、車線制御装置15は、課金情報等の必要な情報を中央装置に送信し、また、中央装置からの指示情報を受信する。
【0004】
図22に示すように、第1車両検知器S1と第2車両検知器S2との間隔は4m程度に設定されている。なお、図19では、第1車両検知器S1を二対の車両検知器で構成しているが、こうすることにより車両の進行方向の検知が可能になる。また、両方の車両検知器の光線が同時に遮断されたときに車両として識別することにより、風に舞う新聞紙などを車両と誤認する検知ミスが防止できる。但し、第1車両検知器S1は一対の車両検知器で構成することも可能である。
【0005】
アンテナ10の指向性は、この第1車両検知器S1と第2車両検知器S2との間の区間だけが無線通信領域となるように絞り込まれる。このレーンに車両が進入し、第1車両検知器S1が車両を検知すると、その検知情報が車線制御装置15に伝えられ、車線制御装置15は路側無線装置16に無線送信を開始させる。車両がETC車両である場合には、車内のダッシュボード上などにETC車載器が設置されている。このETC車載器は、アンテナ10からの無線信号を受信すると、車種などの車両情報や、入口ゲート通過時にETCカードに書き込まれた入口ゲートのID情報などを送信する。この情報はアンテナ10で受信され、路側無線装置16から車線制御装置15に送られる。
【0006】
車線制御装置15は、通過車両14−1から無線による応答があると、自動料金収受の通信処理を実行し、その通信処理が正常に終了すると、路側表示器11に通行可能であることを表示し、遮断機12を開く。
通過車両14−1が第2車両検知器S2の位置に達し、第2車両検知器S2が車両14−1を検知すると、車線制御装置15は、アンテナ10からの送信を打ち切る。車両14−1が第1車両検知器S1の位置から第2車両検知器S2の位置まで走行する間に無線応答しなければ、車線制御装置15は、通過車両14−1を非ETC車両と識別し、路側表示器11に停車の指示を表示し、遮断機12を閉じたままとする。
通過車両14−1が第3車両検知器S3の位置に達し、第3車両検知器S3が車両14−1を検知すると、車線制御装置15は、路側表示器11の表示を消す。これは、後続車両14−2が路側表示器11の表示を見て誤認することを避けるためである。
【0007】
また、ETC車両が、開かれた遮断機12を通過し、あるいは、収受員の課金処理を受けた非ETC車両が、収受員により開かれた遮断機12を通過すると、第4車両検知器S4は、これらの車両の車尾を検知して車線制御装置15に伝え、これを受けた車線制御装置15は、遮断機12を閉じる。
このように、ETCシステムでは、路車間通信の開始及び終了のタイミング、路側表示器11の点灯及び消灯のタイミング、遮断機12の開/閉のタイミングなどを全て、アイランド17に設置した車両検知器S1〜S4の検知結果に基づいて決めている。
【0008】
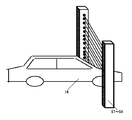
この車両検知器S1〜S4は、図23に示すように、一列に並ぶ複数の投光器と、これに対峙する複数の受光器とを備えており、複数の投光器が発光して光スクリーンを形成し、この光スクリーンを車両14が通過すると、車両の形状に応じて光が遮られ、受光器に検知される。
レーンに進入した車両は、車両検知器S1〜S4が形成する光スクリーンを次々に通過してレーンを通り抜ける。レーン内の車両は、追い越すことも追い越されることも無く、レーンに進入した順番でレーンから退出する。
【0009】
車線制御装置15は、こうした前提のもとに、現在レーン内を走行している車両の車両管理を行っており、第1車両検知器S1が進入車両を検知すると、その車両にIDを付してメモリのテーブルに登録し、第2車両検知器S2、第3車両検知器S3からの検知信号に基づいて、その車両位置を特定し、第4車両検知器S4が車両を検知すると、その車両がレーンからいなくなったものとしてテーブルから消去する。
【0010】
図24は、この車両管理の模様を概念的に示している。車線制御装置15は、まず、第1車両検知器S1が検知した進入車両をB1としてテーブルに登録し、無線通信の開始を制御する。次に第2車両検知器S2が車両を検知すると、車両B1が第2車両検知器S2の位置に到達したものと識別して、テーブルに到達位置を記録し、路車間通信を終了する。そして、車両B1に対するETC車両/非ETC車両の判別結果に基づき、路側表示器11に「通行可」または「停車」のメッセージを表示し、遮断機12の開閉を制御する。次に第3車両検知器S3が車両を検知すると、車両B1が第3車両検知器S3の位置に到達したものと識別してテーブルに到達位置を記録し、路側表示器11の表示を消去する。次に第4車両検知器S4が車尾を検知すると、車両B1が第4車両検知器S4の位置を通過したものと識別して、車両B1を管理対象から除外し、遮断機12を閉じる。
【0011】
しかし、車両検知器では、稀に、車両が通過したのに検知できなかったり、車両が通過しないのに検知したりする誤検知が発生する。こうした誤検知は、牽引車両やトレーラ等の1台の車両を誤って2台と検知したり、あるいは、新聞紙や蛙などが車両検知器に張り付いて光を遮断し、車両が通り過ぎてもそれが検知できなくなったりすること等が原因となる。
【0012】
車両検知器の誤検知が発生すると、車線制御装置15が管理している車両とレーン内に現存する車両との間にズレが生じる。
例えば、図24において、第1車両検知器S1がレーンに進入した車両を検知し、車線制御装置15がこの車両をB2としてテーブルに登録したとする。第2車両検知器S2が車両を検知すると、車線制御装置15は、車両B2が第2車両検知器S2の位置に到達したものと識別し、テーブルに車両B2の到達位置を記録する。
【0013】
次に、車両B2が第3車両検知器S3の位置を通過したとき、第3車両検知器S3がこの車両を検知できなかったとすると、車両管理のテーブル上では、車両B2は第3車両検知器S3の位置に到達していないことになり、そのため、路側表示器11の表示は消去されないままとなる。車両B2が第4車両検知器S3の位置を通過し、第4車両検知器S4が車両B2を検知しても、第3車両検知器S3を通過せずに第4車両検知器S4を通過する筈がないので、これは検知ミスとして扱われ、車両B2は車両管理のテーブル上に残ることになる。
このように、レーンには実在しないのに車両管理テーブル上は残ってしまう車両を「ゴースト車両」と呼んでいる。車両管理ズレは、このゴースト車両により発生する。
第1車両検知器S1が次の車両を検知し、車線制御装置15がこの車両をB3としてテーブルに登録する。第2車両検知器S2が車両を検知すると、車線制御装置15は、車両B3が第2車両検知器S2の位置に到達したものと識別し、テーブルに車両B3の到達位置を記録する。
【0014】
次に、車両B3が第3車両検知器S3の位置を通過し、第3車両検知器S3がこの車両を検知すると、車線制御装置15は、実際に通過したのは車両B3であるのに、ゴースト車両B2が第3車両検知器S3の位置に到達したものと識別し、テーブルに車両B2の到達位置を記録し、路側表示器11の表示を消去する。ここで車両管理ズレが発生する。
【0015】
次に車両B3が第4車両検知器S4の位置を通過し、第4車両検知器S4がこの車両を検知すると、車線制御装置15は、同様に、ゴースト車両B2が第4車両検知器S4の位置を通過したものと識別し、車両B2を管理対象から除外する。そのため、今度は車両B3がゴースト車両として車両管理テーブルに残ることになる。このように、一旦ゴースト車両が発生すると、ゴースト車両が次々と更新されて、車両管理ズレが継続する。
【0016】
この車両管理ズレが起きると、先行車両に対するETC車両/非ETC車両の識別結果に基づいて路側表示器11の表示や遮断機12の制御が行われるため、トラブルが発生する。
係員(収受員)は、レーンを目視し、一台の車両もレーンを走行していないときに車両管理テーブル上で車両の記録が残されている場合に、始めてゴースト車両の存在を知ることができる。このとき、係員は、ゴースト車両を排除する手動操作を行い、車両管理ズレを修正する。
【0017】
この車両管理ズレの自動検出を可能にしたETCシステムが特開2001−312753号公報に開示されている。このシステムでは、2アンテナ方式のゲート(図19のゲートの第1のアンテナ10とは別に、遮断機12の後方に第2のアンテナを備えている。対距離制の有料道路の入口ゲートなどに見られる)の場合、第1のアンテナがETC車載器から受信した車載器情報と第2のアンテナがETC車載器から受信した車載器情報とを照合して車両管理ズレをチェックし、車両管理内容に異常があるときには、その管理内容を変更する。
また、1アンテナ方式のゲートでは、レーン内の車両の滞在時間を計測し、一定の時間を超過した場合に操作パネルにエラー表示を行い、これを見た係員が手入力で車両管理ズレを修正する。
【0018】
【発明が解決しようとする課題】
しかし、特開2001−312753号公報に開示された車両管理方法では、1アンテナ方式の場合に、車両管理ズレの検出結果に対する信頼性が乏しく、そのため、この検出結果を用いて車両管理ズレを自動的に修正することができないと言う問題点がある。
また、2アンテナ方式の場合には、非ETC車両がレーンに進入したとき、車両管理ズレをチェックすることができないと言う問題点がある。
【0019】
本発明は、こうした従来の問題点を解決するものであり、どのような方式のレーンにおいても、車両検知器の誤検知による車両管理ズレを検出し、正しい車両管理状態に戻すことができるETCシステムを提供し、また、その車両管理方法を提供することを目的としている。
【0020】
【課題を解決するための手段】
そこで、本発明のETCシステムでは、通過車両を検知する複数の車両検知手段と、この通過車両を撮影する撮影手段とを設け、複数の車両検知手段により検知された車両の同一性を、撮影手段が撮影した映像を用いて判別するようにしている。
【0021】
また、通過車両を検知する複数の車両検知手段の車両検知情報に基づいて、この複数の車両検知手段が配置された区間に存在する車両の車両位置情報を管理する車両管理方法において、この区間の全域を撮影手段で撮影し、車両検知手段の各々が車両を検知した時点の撮影手段の映像を用いて、車両検知手段が検知した車両と隣接する車両検知手段が検知した車両との同一性を識別し、車両位置情報の誤りを検出するようにしている。
【0022】
このように、車両が通過したか否かのみを検出する車両検知器の情報と撮影手段の画像情報とを組み合わせることにより、それぞれの車両検知器で検知された車両が同じものかどうかを識別することができ、車両管理ズレを修正することができる。
【0023】
【発明の実施の形態】
(第1の実施形態)
本発明の第1の実施形態では、レーンを通過する車両を一台の監視カメラで追跡し、監視カメラの画像解析から得られる情報と車両検知器の検知信号との整合を取ることにより車両の位置を特定し、車両管理ズレの修正を行うETCシステムについて説明する。
【0024】
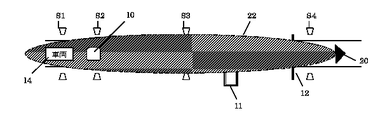
このETCレーンには、図2に示すように、ETCレーンの全体を見通すことができるレーンの頭上に監視カメラ20を設置している。図1は、この監視カメラ20の撮影エリア22を示している。
また、図3は、車両検知器S1〜S4と監視カメラ20との情報を用いてETCレーンの車線制御を行う車線制御装置30の構成を示している。この車線制御装置30は、車両検知器S1〜S4の検知情報を基に車両管理データを生成する車両管理データ生成部31と、監視カメラ20の画像を取り込み、画像解析して画像処理データを生成する画像処理データ生成部32と、車両管理データ生成部31及び画像処理データ生成部32に時刻情報を提供する時計35と、車両管理データ及び画像処理データが書き込まれる車両管理テーブル33と、車両管理テーブル33に書き込まれた車両管理データを、画像処理データを用いて修正し、この車両管理テーブル33を用いて車線制御を行う車線制御部34とを備えている。
【0025】
図4は、監視カメラ20が撮影する画像を模式的に示している。第1車両検知器S1が映る画像上のアドレスをL1、第2車両検知器S2が映る画像上のアドレスをL2、第3車両検知器S3が映る画像上のアドレスをL3、また、第4車両検知器S4が映る画像上のアドレスをL4とすると、第1車両検知器S1が車両を検知したとき、ETCレーンに進入した車両は、画像上でアドレスL1の位置まで進んでいる。同様に、第2車両検知器S2が車両を検知したとき、車両は画像上のアドレスL2の位置まで進み、第3車両検知器S3が車両を検知したとき、車両は画像上のアドレスL3の位置まで進み、また、第4車両検知器S4が車両を検知したとき、車両は画像上のアドレスL4の位置まで進んでいる。
【0026】
画像上の車両位置は画像解析により求めることができる。画像解析の手法は種々知られている。例えば、画像処理のエリアを走行レーンに限定し、そのエリア内のエッジ検出を行うと、車両が存在する箇所ではエッジの量が多くなるため、その部分を車両として検出することができる。
図5は、画像上のアドレスL1、L2、L3、及びL4の各位置に車両が存在する映像の撮影時間を時系列で示している。矢印で示すように、この変化を追うことにより車両を追跡することができる。
【0027】
一方、図6は、各車両検知器が一台の走行車両を順次検知して検知信号を出力する時点を時系列で示している。この検知時刻は、図5において、画像上のアドレスL1、L2、L3、及びL4に車両が出現する時刻と一致するため、各車両検知器の車両検知時刻における監視カメラ20の映像を解析し、図5に示すように時系列の変化を追うことにより、各車両検知器で検知された車両が同一車両であるか否かを判別することができる。そのため、各車両検知器の検知結果に基づく車両管理で、車両検知器の検知車両を実体の無いゴースト車両と誤認した場合に、その車両検知器の検知車両が実際は何であるかを、監視カメラ20の映像解析から識別し、車両管理上の誤りを直ちに修正することができる。
【0028】
ここでは、車両管理の一例として、ETCレーンに存在する個々の車両に対して、各車両検知器の検知結果を基に、車線制御装置30の車両管理データ生成部31が“車両管理データ”を作成し、また、各車両検知器が検知信号を出力した時点の監視カメラ20の映像を画像処理データ生成部32が解析して“画像処理データ”を作成し、車線制御部34が、車両管理データの誤りを、画像処理データを用いて修正する場合について説明する。
【0029】
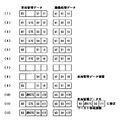
図10(a)に示すように、車両管理データには、第1車両検知器S1が車両を検知した時点で設定するカーID(CID)と、その車両に対するETC/非ETC判別結果と、検知した車両検知器の位置を示す位置情報と、その車両検知器の検知時刻を示す時刻情報とを記述する。
また、図10(b)に示すように、画像処理データには、第1車両検知器S1が車両を検知した時点の画像から識別した車両に対して設定するPCIDと、映像解析の契機となった検知信号を出力した車両検知器の位置を示す位置情報と、その車両検知器の検知時刻を示す時刻情報とを記述する。
【0030】
図7のフロー図は、画像処理データ生成部32での画像処理データの作成手順を示している。
車両検知器が検知信号を出力すると(ステップ1)、監視カメラ20の画像を取り込み(ステップ2)、車両検出処理を行い(ステップ3)、検知信号を出力した車両検知器の位置に車両が存在するか否かを識別する。車両が存在しない場合(例えば、飛んで来た新聞紙に反応して検知信号を出力したような場合)は、ステップ1に戻る。車両が存在する場合は、その検知信号を出力した車両検知器が第1車両検知器S1であれば、その車両に対してPCIDを割り当てる(ステップ7)。また、その検知信号を出力した車両検知器が第2〜第4車両検知器S2〜S4であれば、前回の車両検出画像と今回の車両検出画像とを比較し、その車両検出位置の変化から、前回の画像から検出した車両と今回の画像から検出した車両との同一性を確認し、前回の車両検出画像から生成した画像処理データを参照して、その車両のPCIDを識別する(ステップ8)。ステップ7またはステップ8で求めたPCIDを、今回の車両検出画像から生成する画像処理データのPCIDとして記録する。
【0031】
また、この画像処理データの位置情報として、検知信号を出力した車両検知器の位置情報を登録し(ステップ9)、この画像処理データの時刻情報として、その車両検知器が検知信号を出力した時刻を登録する(ステップ10)。この画像処理データを車両管理データが記録されている車両管理テーブル33に記録し(ステップ11)、この画像処理データを用いて、車両管理データの修正処理を行う(ステップ12)。
【0032】
図8のフロー図は、車線制御部34での車両管理データの修正処理の手順を示しており、また、図9及び図11は、この修正処理手順を当てはめた具体例を示している。まず、この具体例から説明する。
【0033】
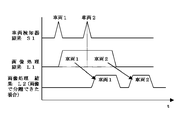
図9は、ETCレーンに進入した車両の到達位置(各車両検知器S1〜S4の位置)と到達時刻との関係を図示している。図11は、図9の各車両位置で生成される車両管理データ及び画像処理データを示している。例えば、第1車両検知器S1が時刻t1に検知した図9の(1)の車両に対してCID=B1を付与することにより、図11(1)の車両管理データが生成され、車両管理テーブル33に記録される。また、第1車両検知器S1が検知信号を出力した時刻t1の画像を解析して検出した図9の(1)の車両に対してPCID=b1を付与することにより、図11(1)の画像処理データが生成され、車両管理テーブル33に記録される。
【0034】
また、CID=B1の車両が第1車両検知器S1と第2車両検知器S2との間を走行する過程でETC車両と判定されると、この車両が第2車両検知器S2で時刻t2に検知されたとき(図9の(2))、図11(2)の車両管理データが生成され、車両管理テーブルに、同一CID(=B1)の図11(1)の車両管理データに代わって記録される。また、第2車両検知器S2が検知信号を出力した時刻t2の画像を解析して検出した図9の(2)の車両に対して、図11(2)の画像処理データが生成され、車両管理テーブルに、同一PCID(=b1)の図11(1)の画像処理データに代わって記録される。
【0035】
同様に、第3車両検知器S3が時刻t3に車両を検出した時点(図9の(3))で、車両管理テーブルの記録は、図11(3)の車両管理データ及び画像処理データにより更新され、第4車両検知器S4が時刻t4に車両を検出した時点(図9の(4))で、車両管理テーブルの記録は、図11(4)の車両管理データ及び画像処理データにより更新される。位置情報がS4に達した車両管理データ及び画像処理データは、車両がETCレーンを通り過ぎたことを表しているため、車両管理テーブルから削除される。
【0036】
同じように、第1車両検知器S1が時刻t5に検知した車両(図9の(5))に対してCID=B2が付与され、また、PCID=b2が付与されて図11(5)の車両管理データ及び画像処理データが車両管理テーブルに記録され、この車両(ETC車両)を第2車両検知器S2が時刻t6に検知した時点(図9の(6))で車両管理テーブルは図11(6)の車両管理データ及び画像処理データに更新される。
この車両が第3車両検知器S3を通過するときに(図9の(7))、検知ミスが発生すると、第3車両検知器S3から検知信号が出力されないため、図9の(7)の位置に対応する車両管理データ及び画像処理データは生成されない。
【0037】
この車両が時刻t8に第4車両検知器S4の位置に達すると(図9の(8))、第4車両検知器S4は検知信号を出力し、この検知信号が出力された時刻t8の画像を解析して図11(8)の画像処理データが生成され、図11(6)の画像処理データに代わって、車両管理テーブルに記録され、その後、位置情報がS4であるため、車両管理テーブルから削除される。
【0038】
一方、第4車両検知器S4の検知信号に基づいて生成された図11(8)の車両管理データは、第3車両検知器S3が車両を検知していないのに、第4車両検知器S4が車両を検知する筈がないので、廃棄される。
従って、車両管理テーブルには、車両管理データとして図11(6)の車両管理データが残ることになる。
【0039】
次に、第1車両検知器S1が時刻t9に検知した車両(図9の(9))に対してCID=B3が付与され、また、PCID=b3が付与されて図11(9)の車両管理データ及び画像処理データが車両管理テーブルに記録される。この車両が第2車両検知器S2の位置に時刻t10に到達すると、この車両(非ETC車両)を第2車両検知器S2が検知した時点(図9の(10))で図11(10)の車両管理データ及び画像処理データが生成され、車両管理テーブルに記録された同一CID(=B3)及び同一PCID(=b3)の車両管理データ及び画像処理データが更新される。
【0040】
この車両が第3車両検知器S3の位置に時刻t11に到達し、第3車両検知器S3がこの車両を検知して検知信号を出力すると、車両管理テーブルに記録されている車両管理データの記録順序及びその位置情報から見て、この車両はCID=B2の車両と判断できるため、図11(11)の車両管理データが生成され、図11(6)の車両管理データに代わって車両管理テーブルに記録される。
一方、第3車両検知器S3が検知信号を出力した時刻t11の画像を解析して図11(11)の画像処理データが生成され、図11(10)の画像処理データに代わって、車両管理テーブルに記録される。
【0041】
このとき、位置情報(S3)及び時刻情報(t11)が同一の図11(11)の車両管理データと画像処理データとが比較され、車両管理データのCID(=B2)が、画像処理データのPCID(=b3)に対応する車両管理データのCID(=B3)と異なる場合に、車両管理データのCID=B2をCID=B3に修正し、車両管理データのETC/非ETC判別結果を、修正したCID=B3の判別結果(非ETC)に修正する処理が行われ。
また、この修正でCID=B3の車両管理データが出現したため、同一CID(=B3)の図11(8)の車両管理データ及び画像処理データは車両管理テーブルから削除される。
【0042】
こうして車両管理テーブルの車両管理データが修正されたことにより、この車両が第4車両検知器S4の位置に時刻t12に到達したとき(図9の(12))には、第4車両検知器S4の検知信号に基づいて、正常な図11(12)の車両管理データ及び画像処理データが作成され、車両管理テーブルに記録されたデータが更新される。
【0043】
図8のフロー図は、この車両管理データの修正処理手順を一般化して示している。
車両管理テーブルに記入した画像処理データの位置情報がS1であるか否かを識別し(ステップ20)、S1であるときは、その画像処理データの位置情報(S1)及び時刻情報と同一の位置情報(S1)及び時刻情報を有する車両管理データを車両管理テーブルから探し、その車両管理データのCIDと画像処理データのPCIDとを対応付けて記憶する(ステップ21)。また、車両管理テーブルに記入した画像処理データの位置情報がS2〜S4であるときは、その画像処理データの位置情報及び時刻情報と同一の位置情報及び時刻情報を有する車両管理データを車両管理テーブルから探し(ステップ22)、その車両管理データのCID(=Bi)が、画像処理データのPCID(=bk)に対応付けたCID(=Bk)と一致するか否かを識別する(ステップ23)。一致する場合は、車両管理データの修正は行わない。一致しない場合は、車両管理データのCIDを画像処理データのPCID(=bk)に対応付けたCID(=Bk)に修正し、また、車両管理データのETC/非ETC判別結果を、修正したCID(=Bk)の車両のETC/非ETC判別結果に修正する。また、この修正で、車両管理テーブルに同一CIDの車両管理データが複数出現した場合は、時刻情報が最新の車両管理データだけを残し、CIDが重複する他の車両管理データを削除する(ステップ24)。
こうした処理により、車両管理上に現れるゴースト車両を削除することができ、車両管理を正常化することができる。
【0044】
なお、ここでは、検知ミス後の第4車両検知器S4で検知された検知データを破棄し、車両管理テーブル33には記録していないが、この車両検知器の検知データに基づいて位置情報及び時刻情報を記録した車両管理データを車両管理テーブル33に記録し、位置情報及び時刻情報が一致する画像処理データを用いて、車両管理データの不足するCIDを補正し、そのCIDを持つ車両のETC/非ETC判別結果を車両管理データに記述することにより、その車両管理データを再生するようにしても良い。この場合には、ゴースト車両の発生自体を抑制することができる。
【0045】
また、ここでは、車両管理データの誤りを自動修正する場合について説明したが、車両管理テーブルに記録された車両管理データの誤りを検出した時点で警報を出力し、係員の操作で車両管理データを修正するようにしたり、あるいは、警報を出力して車両管理データの誤りを自動修正するようにしたりすることもできる。
【0046】
また、監視カメラ20の遠方に位置する複数の車両が、画像上で重なって映り、後ろ側の車両が車両検知器で検知されたときに、この車両の位置が画像上で判別できない場合でも、図12に示すように、検知信号を出力した車両検知器の位置に車両が存在するものとして、画像処理データを生成するものとする。こうすることにより、車両が監視カメラ20に近付き、個々の車両が画像上で区別できるようになったときに、それぞれの車両に対応付けた画像処理データの生成が可能になる。
【0047】
(第2の実施形態)
第2の実施形態では、レーンを通過する車両を複数の台数の監視カメラで追跡するETCシステムについて説明する。
このシステムでは、監視カメラの画像上で複数の車両が重ならないように、複数の監視カメラでETCレーンを分担して撮影する。図14は、ETCレーンの前後に監視カメラ20及び監視カメラ21を配置する場合を示しており、図13は、これらの監視カメラ20及び監視カメラ21の撮影エリア23、24を示している。
【0048】
また、図15(a)は、ETCレーンの前側の頭上に設置した監視カメラ21の画像を示し、また、図15(b)は、ETCレーンの後側の頭上に設置した監視カメラ20の画像を示している。このように、複数の監視カメラ20、21の画像に共通する車両検知器(この場合は第3車両検知器S3)が映るように、各監視カメラ20、21の撮影エリアを設定することにより、図16に示すように、その共通する車両検知器の位置を通過する車両が、監視カメラ20及び21で同時刻に撮影される。この同時刻に撮影された同一車両の映像を介して、矢印で示すように、監視カメラ21の画像に映る車両を監視カメラ20の画像上で追跡することができる。
車線制御装置の構成は、第1の実施形態(図3)と同じである。ただ、画像処理データ生成部32に監視カメラ20及び21の画像が入力し、画像処理データ生成部32が、監視カメラ20及び21の画像から、それぞれ画像処理データを生成して車両管理テーブル33に書き込む点だけが相違している。
【0049】
図17のフロー図は、画像処理データ生成部32における画像処理データの作成手順を示している。
ここで、ステップ30からステップ40は、監視カメラ21の画像から画像処理データ1を作成する手順であり、ステップ41からステップ51は、監視カメラ20の画像から画像処理データ2を作成する手順である。これらの手順は、第1の実施形態で説明した画像処理データの作成手順(図7)と基本的に同じであり、以下に示す点だけが相違している。
【0050】
画像処理データ1の作成は、第1、第2及び第3車両検知器S1、S2、S3が検知信号を出力したときにだけ行い(ステップ30)、画像処理データ1のPCIDにはPCID1を使用する(ステップ36、ステップ37)。
また、画像処理データ2の作成は、第3及び第4車両検知器S3、S4が検知信号を出力したときにだけ行う(ステップ41)。また、第3車両検知器S3が検知信号を出力したときに第3車両検知器S3の位置に存在する車両に対してPCID2を付与し(ステップ47)、画像処理データ2のPCIDは、このPCID2を使用する(ステップ48)。
こうして生成された画像処理データ1及び画像処理データ2は、車両管理テーブル33に記録され(ステップ40、51)、これらの画像処理データを用いて、車両管理データの修正処理が行われる(ステップ52)。
【0051】
図18のフロー図は、車線制御部34が画像処理データ1及び画像処理データ2を用いて車両管理データを修正する処理手順を示している。
車両管理テーブルに記入された画像処理データが画像処理データ1であるか画像処理データ2であるかを識別し(ステップ60)、画像処理データ1の場合はステップ61〜ステップ64の修正処理を行い、画像処理データ2の場合はステップ65〜ステップ68の修正処理を行う。
【0052】
この修正処理自体は、第1の実施形態で説明した修正処理(図8)と基本的に同じである。
画像処理データ1を用いる修正処理では、PCIDとしてPCID1を用いる点だけが相違している(ステップ64)が、その他は変わりがない。
【0053】
また、画像処理データ2を用いる修正処理では、監視カメラ21と監視カメラ20との撮影エリアに共通して存在する第3車両検知器S3の位置を位置情報に持ち、時刻情報が同じ画像処理データ1と画像処理データ2とを比較して、PCID2に対応するPCID1を求める。次いで、ステップ62で対応付けた、そのPCID1に対応する車両管理データのCIDを求め、PCID2に対応するCIDを得る(ステップ66)。
【0054】
画像処理データ2の位置情報がS4であるときは、その画像処理データ2の位置情報及び時刻情報と同一の位置情報及び時刻情報を有する車両管理データを車両管理テーブルから探し(ステップ67)、その車両管理データのCID(=Bi)が、画像処理データ2のPCID2(=bk)に対応付けたCID(=Bk)と一致するか否かを識別し(ステップ68)、一致しない場合に、車両管理データのCIDを画像処理データ2のPCID2(=bk)に対応付けたCID(=Bk)に修正し、また、車両管理データのETC/非ETC判別結果を、修正したCID(=Bk)の車両のETC/非ETC判別結果に修正する。また、この修正で、車両管理テーブルに同一CIDの車両管理データが複数出現した場合は、時刻情報が最新の車両管理データだけを残し、CIDが重複する他の車両管理データを削除する(ステップ69)。
【0055】
このように、複数の監視カメラを用いることにより、ETCレーンを走行する車両を重ならずに映すことができ、この画像から生成した画像処理データを用いて車両管理データの誤りを的確に修正することができる。
【0056】
なお、ここでは2台の監視カメラを用いる場合について説明したが、3台以上の監視カメラを用いることも可能である。この場合も、隣接する撮影エリアが共通の車両検知器を含むように、その撮影エリアを設定する。
また、各実施形態で説明した車両管理の方法は、一つの例であって、本発明はそれに限定されるものでは無い。
【0057】
【発明の効果】
以上の説明から明らかなように、本発明のETCシステム及び車両管理方法では、車両が通過したか否かのみを検出する車両検知器の情報と監視カメラの画像情報とを組み合わせることにより、それぞれの車両検知器で検知された車両が同じ車両であるかどうかを識別することが可能になり、その結果、車両管理ズレを修正することができる。
【0058】
本発明は、どのような料金徴収方式のETCゲートにも適用することができ、また、非ETC車両がレーンを走行する場合でも、その車両管理を的確に行うことができる。
【図面の簡単な説明】
【図1】本発明の第1の実施形態における監視カメラの撮影エリアを示す図、
【図2】本発明の第1の実施形態におけるETCレーンを示す図、
【図3】本発明の第1の実施形態における車線制御装置の構成を示すブロック図、
【図4】本発明の第1の実施形態における監視カメラの画像を示す図、
【図5】本発明の第1の実施形態における画像処理で得られる車両画像の時系列を示す図、
【図6】本発明の第1の実施形態における車両検知器の検知信号の時系列を示す図、
【図7】本発明の第1の実施形態における画像処理データの生成手順を示すフロー図、
【図8】本発明の第1の実施形態における車両管理データの修正処理手順を示すフロー図、
【図9】本発明の第1の実施形態における車両管理データの修正処理を説明する説明図、
【図10】本発明の第1の実施形態における車両管理データ及び画像処理データのデータ構造を示す図、
【図11】本発明の第1の実施形態における車両管理データ及び画像処理データの具体例を示す図、
【図12】本発明の第1の実施形態における重畳車両が分離する時系列変化を示す図、
【図13】本発明の第2の実施形態における監視カメラの撮影エリアを示す図、
【図14】本発明の第2の実施形態におけるETCレーンを示す図、
【図15】本発明の第2の実施形態における監視カメラの画像を示す図、
【図16】本発明の第2の実施形態における画像処理で得られる車両画像の時系列を示す図、
【図17】本発明の第2の実施形態における画像処理データの生成手順を示すフロー図、
【図18】本発明の第2の実施形態における車両管理データの修正処理手順を示すフロー図、
【図19】従来のETCシステムの料金所のゲートを示す斜視図、
【図20】従来のETCシステムの料金所のゲートを示す平面図、
【図21】従来のETCシステムの料金所の構成を示す機能ブロック図、
【図22】従来のETCシステムの路車間通信領域を示す図、
【図23】従来の車両検知器を示す図、
【図24】従来のETCシステムでの車両管理を説明する図である。
【符号の説明】
S1 第1車両検知器
S2 第2車両検知器
S3 第3車両検知器
S4 第4車両検知器
10 アンテナ
11 路側表示器
12 遮断機
13 ブース
14 車両
15 車線制御装置
16 路側無線装置
17 アイランド
20 監視カメラ
21 監視カメラ
22 撮影エリア
23 撮影エリア
24 撮影エリア
30 車線制御装置
31 車両管理データ生成部
32 画像処理データ生成部
33 車両管理テーブル
34 車線制御部
35 時計
【発明の属する技術分野】
本発明は、有料道路の自動料金収受(Electronic Toll Collection:ETC)システムと、そのシステム等での車両管理方法に関し、特に、料金所のETCレーン内の車両を的確に管理できるようにしたものである。
【0002】
【従来の技術】
近年、ETCシステムは、各所の有料道路に導入されており、このシステムを利用できる車両は、有料道路の料金所をノンストップで通過することができる。ETCシステムを利用するには、車両にETC車載器を取り付け、この車載器にETCカードを挿入して、料金所の通信用アンテナを備えたETCレーンのゲートを通過しなければならない。このETC車載器には、それを取り付けた車両の車種、長さ、幅、高さなどの情報が予め登録(セットアップ)されている。また、ETCカードは、クレジットカード会社が発行するETC専用のICカードなどであり、料金所通過の際に通過ゲートのIDや料金収受の記録が書き込まれる。 有料道路の通行料は車種ごとに設定されている。また、入口ゲートと出口ゲートとを設けて走行距離に応じた料金を算定する対距離制の方式と、一つのゲートで一定額を徴収する料金均一制の方式とがある。ゲートの構成は、その方式の違いや入口ゲート、出口ゲートにより異なり、また、立地条件によっても違っている。このゲートの一例を図19(斜視図)及び図20(平面図)に示している。 このゲートは、ETC車載器との無線通信に使用するアンテナ10をレーン上に備え、アイランド17には、複数の投光器及び受光器の対から成り、光線の遮断によって車両の通過を感知する第1車両検知器S1、第2車両検知器S2、第3車両検知器S3及び第4車両検知器S4と、レーンを通過する車両14−1に対して「通行可」または「停車」を表示する路側表示器11と、車両14−1がETC車載器を装備したETC車両であるときはバーを開き、非ETC車両であるときはバーを閉じたままとする遮断機12と、アンテナ10を通じてETC車載器と無線通信を行う路側無線装置16を内包し、レーンの動作を制御する車線制御装置15と、収受員が入るブース13とを備えている。
【0003】
図21は各部の関係をブロック図で示している。車線制御装置15は、各車両検知器S1〜S4及び路側無線装置16の検知情報を基に、車両14−1がETC車両であるか非ETC車両であるかを識別し、ETC車両であるときは、必要な課金処理を行い、路側表示器11に「通行可」を表示して遮断機12を開く。また、非ETC車両であるときは、路側表示器11に「停車」を表示し、遮断機12は閉じたままとする。なお、非ETC車両の場合は、収受員が料金の徴収等を行った後、手動で遮断機12を開く。また、車線制御装置15は、課金情報等の必要な情報を中央装置に送信し、また、中央装置からの指示情報を受信する。
【0004】
図22に示すように、第1車両検知器S1と第2車両検知器S2との間隔は4m程度に設定されている。なお、図19では、第1車両検知器S1を二対の車両検知器で構成しているが、こうすることにより車両の進行方向の検知が可能になる。また、両方の車両検知器の光線が同時に遮断されたときに車両として識別することにより、風に舞う新聞紙などを車両と誤認する検知ミスが防止できる。但し、第1車両検知器S1は一対の車両検知器で構成することも可能である。
【0005】
アンテナ10の指向性は、この第1車両検知器S1と第2車両検知器S2との間の区間だけが無線通信領域となるように絞り込まれる。このレーンに車両が進入し、第1車両検知器S1が車両を検知すると、その検知情報が車線制御装置15に伝えられ、車線制御装置15は路側無線装置16に無線送信を開始させる。車両がETC車両である場合には、車内のダッシュボード上などにETC車載器が設置されている。このETC車載器は、アンテナ10からの無線信号を受信すると、車種などの車両情報や、入口ゲート通過時にETCカードに書き込まれた入口ゲートのID情報などを送信する。この情報はアンテナ10で受信され、路側無線装置16から車線制御装置15に送られる。
【0006】
車線制御装置15は、通過車両14−1から無線による応答があると、自動料金収受の通信処理を実行し、その通信処理が正常に終了すると、路側表示器11に通行可能であることを表示し、遮断機12を開く。
通過車両14−1が第2車両検知器S2の位置に達し、第2車両検知器S2が車両14−1を検知すると、車線制御装置15は、アンテナ10からの送信を打ち切る。車両14−1が第1車両検知器S1の位置から第2車両検知器S2の位置まで走行する間に無線応答しなければ、車線制御装置15は、通過車両14−1を非ETC車両と識別し、路側表示器11に停車の指示を表示し、遮断機12を閉じたままとする。
通過車両14−1が第3車両検知器S3の位置に達し、第3車両検知器S3が車両14−1を検知すると、車線制御装置15は、路側表示器11の表示を消す。これは、後続車両14−2が路側表示器11の表示を見て誤認することを避けるためである。
【0007】
また、ETC車両が、開かれた遮断機12を通過し、あるいは、収受員の課金処理を受けた非ETC車両が、収受員により開かれた遮断機12を通過すると、第4車両検知器S4は、これらの車両の車尾を検知して車線制御装置15に伝え、これを受けた車線制御装置15は、遮断機12を閉じる。
このように、ETCシステムでは、路車間通信の開始及び終了のタイミング、路側表示器11の点灯及び消灯のタイミング、遮断機12の開/閉のタイミングなどを全て、アイランド17に設置した車両検知器S1〜S4の検知結果に基づいて決めている。
【0008】
この車両検知器S1〜S4は、図23に示すように、一列に並ぶ複数の投光器と、これに対峙する複数の受光器とを備えており、複数の投光器が発光して光スクリーンを形成し、この光スクリーンを車両14が通過すると、車両の形状に応じて光が遮られ、受光器に検知される。
レーンに進入した車両は、車両検知器S1〜S4が形成する光スクリーンを次々に通過してレーンを通り抜ける。レーン内の車両は、追い越すことも追い越されることも無く、レーンに進入した順番でレーンから退出する。
【0009】
車線制御装置15は、こうした前提のもとに、現在レーン内を走行している車両の車両管理を行っており、第1車両検知器S1が進入車両を検知すると、その車両にIDを付してメモリのテーブルに登録し、第2車両検知器S2、第3車両検知器S3からの検知信号に基づいて、その車両位置を特定し、第4車両検知器S4が車両を検知すると、その車両がレーンからいなくなったものとしてテーブルから消去する。
【0010】
図24は、この車両管理の模様を概念的に示している。車線制御装置15は、まず、第1車両検知器S1が検知した進入車両をB1としてテーブルに登録し、無線通信の開始を制御する。次に第2車両検知器S2が車両を検知すると、車両B1が第2車両検知器S2の位置に到達したものと識別して、テーブルに到達位置を記録し、路車間通信を終了する。そして、車両B1に対するETC車両/非ETC車両の判別結果に基づき、路側表示器11に「通行可」または「停車」のメッセージを表示し、遮断機12の開閉を制御する。次に第3車両検知器S3が車両を検知すると、車両B1が第3車両検知器S3の位置に到達したものと識別してテーブルに到達位置を記録し、路側表示器11の表示を消去する。次に第4車両検知器S4が車尾を検知すると、車両B1が第4車両検知器S4の位置を通過したものと識別して、車両B1を管理対象から除外し、遮断機12を閉じる。
【0011】
しかし、車両検知器では、稀に、車両が通過したのに検知できなかったり、車両が通過しないのに検知したりする誤検知が発生する。こうした誤検知は、牽引車両やトレーラ等の1台の車両を誤って2台と検知したり、あるいは、新聞紙や蛙などが車両検知器に張り付いて光を遮断し、車両が通り過ぎてもそれが検知できなくなったりすること等が原因となる。
【0012】
車両検知器の誤検知が発生すると、車線制御装置15が管理している車両とレーン内に現存する車両との間にズレが生じる。
例えば、図24において、第1車両検知器S1がレーンに進入した車両を検知し、車線制御装置15がこの車両をB2としてテーブルに登録したとする。第2車両検知器S2が車両を検知すると、車線制御装置15は、車両B2が第2車両検知器S2の位置に到達したものと識別し、テーブルに車両B2の到達位置を記録する。
【0013】
次に、車両B2が第3車両検知器S3の位置を通過したとき、第3車両検知器S3がこの車両を検知できなかったとすると、車両管理のテーブル上では、車両B2は第3車両検知器S3の位置に到達していないことになり、そのため、路側表示器11の表示は消去されないままとなる。車両B2が第4車両検知器S3の位置を通過し、第4車両検知器S4が車両B2を検知しても、第3車両検知器S3を通過せずに第4車両検知器S4を通過する筈がないので、これは検知ミスとして扱われ、車両B2は車両管理のテーブル上に残ることになる。
このように、レーンには実在しないのに車両管理テーブル上は残ってしまう車両を「ゴースト車両」と呼んでいる。車両管理ズレは、このゴースト車両により発生する。
第1車両検知器S1が次の車両を検知し、車線制御装置15がこの車両をB3としてテーブルに登録する。第2車両検知器S2が車両を検知すると、車線制御装置15は、車両B3が第2車両検知器S2の位置に到達したものと識別し、テーブルに車両B3の到達位置を記録する。
【0014】
次に、車両B3が第3車両検知器S3の位置を通過し、第3車両検知器S3がこの車両を検知すると、車線制御装置15は、実際に通過したのは車両B3であるのに、ゴースト車両B2が第3車両検知器S3の位置に到達したものと識別し、テーブルに車両B2の到達位置を記録し、路側表示器11の表示を消去する。ここで車両管理ズレが発生する。
【0015】
次に車両B3が第4車両検知器S4の位置を通過し、第4車両検知器S4がこの車両を検知すると、車線制御装置15は、同様に、ゴースト車両B2が第4車両検知器S4の位置を通過したものと識別し、車両B2を管理対象から除外する。そのため、今度は車両B3がゴースト車両として車両管理テーブルに残ることになる。このように、一旦ゴースト車両が発生すると、ゴースト車両が次々と更新されて、車両管理ズレが継続する。
【0016】
この車両管理ズレが起きると、先行車両に対するETC車両/非ETC車両の識別結果に基づいて路側表示器11の表示や遮断機12の制御が行われるため、トラブルが発生する。
係員(収受員)は、レーンを目視し、一台の車両もレーンを走行していないときに車両管理テーブル上で車両の記録が残されている場合に、始めてゴースト車両の存在を知ることができる。このとき、係員は、ゴースト車両を排除する手動操作を行い、車両管理ズレを修正する。
【0017】
この車両管理ズレの自動検出を可能にしたETCシステムが特開2001−312753号公報に開示されている。このシステムでは、2アンテナ方式のゲート(図19のゲートの第1のアンテナ10とは別に、遮断機12の後方に第2のアンテナを備えている。対距離制の有料道路の入口ゲートなどに見られる)の場合、第1のアンテナがETC車載器から受信した車載器情報と第2のアンテナがETC車載器から受信した車載器情報とを照合して車両管理ズレをチェックし、車両管理内容に異常があるときには、その管理内容を変更する。
また、1アンテナ方式のゲートでは、レーン内の車両の滞在時間を計測し、一定の時間を超過した場合に操作パネルにエラー表示を行い、これを見た係員が手入力で車両管理ズレを修正する。
【0018】
【発明が解決しようとする課題】
しかし、特開2001−312753号公報に開示された車両管理方法では、1アンテナ方式の場合に、車両管理ズレの検出結果に対する信頼性が乏しく、そのため、この検出結果を用いて車両管理ズレを自動的に修正することができないと言う問題点がある。
また、2アンテナ方式の場合には、非ETC車両がレーンに進入したとき、車両管理ズレをチェックすることができないと言う問題点がある。
【0019】
本発明は、こうした従来の問題点を解決するものであり、どのような方式のレーンにおいても、車両検知器の誤検知による車両管理ズレを検出し、正しい車両管理状態に戻すことができるETCシステムを提供し、また、その車両管理方法を提供することを目的としている。
【0020】
【課題を解決するための手段】
そこで、本発明のETCシステムでは、通過車両を検知する複数の車両検知手段と、この通過車両を撮影する撮影手段とを設け、複数の車両検知手段により検知された車両の同一性を、撮影手段が撮影した映像を用いて判別するようにしている。
【0021】
また、通過車両を検知する複数の車両検知手段の車両検知情報に基づいて、この複数の車両検知手段が配置された区間に存在する車両の車両位置情報を管理する車両管理方法において、この区間の全域を撮影手段で撮影し、車両検知手段の各々が車両を検知した時点の撮影手段の映像を用いて、車両検知手段が検知した車両と隣接する車両検知手段が検知した車両との同一性を識別し、車両位置情報の誤りを検出するようにしている。
【0022】
このように、車両が通過したか否かのみを検出する車両検知器の情報と撮影手段の画像情報とを組み合わせることにより、それぞれの車両検知器で検知された車両が同じものかどうかを識別することができ、車両管理ズレを修正することができる。
【0023】
【発明の実施の形態】
(第1の実施形態)
本発明の第1の実施形態では、レーンを通過する車両を一台の監視カメラで追跡し、監視カメラの画像解析から得られる情報と車両検知器の検知信号との整合を取ることにより車両の位置を特定し、車両管理ズレの修正を行うETCシステムについて説明する。
【0024】
このETCレーンには、図2に示すように、ETCレーンの全体を見通すことができるレーンの頭上に監視カメラ20を設置している。図1は、この監視カメラ20の撮影エリア22を示している。
また、図3は、車両検知器S1〜S4と監視カメラ20との情報を用いてETCレーンの車線制御を行う車線制御装置30の構成を示している。この車線制御装置30は、車両検知器S1〜S4の検知情報を基に車両管理データを生成する車両管理データ生成部31と、監視カメラ20の画像を取り込み、画像解析して画像処理データを生成する画像処理データ生成部32と、車両管理データ生成部31及び画像処理データ生成部32に時刻情報を提供する時計35と、車両管理データ及び画像処理データが書き込まれる車両管理テーブル33と、車両管理テーブル33に書き込まれた車両管理データを、画像処理データを用いて修正し、この車両管理テーブル33を用いて車線制御を行う車線制御部34とを備えている。
【0025】
図4は、監視カメラ20が撮影する画像を模式的に示している。第1車両検知器S1が映る画像上のアドレスをL1、第2車両検知器S2が映る画像上のアドレスをL2、第3車両検知器S3が映る画像上のアドレスをL3、また、第4車両検知器S4が映る画像上のアドレスをL4とすると、第1車両検知器S1が車両を検知したとき、ETCレーンに進入した車両は、画像上でアドレスL1の位置まで進んでいる。同様に、第2車両検知器S2が車両を検知したとき、車両は画像上のアドレスL2の位置まで進み、第3車両検知器S3が車両を検知したとき、車両は画像上のアドレスL3の位置まで進み、また、第4車両検知器S4が車両を検知したとき、車両は画像上のアドレスL4の位置まで進んでいる。
【0026】
画像上の車両位置は画像解析により求めることができる。画像解析の手法は種々知られている。例えば、画像処理のエリアを走行レーンに限定し、そのエリア内のエッジ検出を行うと、車両が存在する箇所ではエッジの量が多くなるため、その部分を車両として検出することができる。
図5は、画像上のアドレスL1、L2、L3、及びL4の各位置に車両が存在する映像の撮影時間を時系列で示している。矢印で示すように、この変化を追うことにより車両を追跡することができる。
【0027】
一方、図6は、各車両検知器が一台の走行車両を順次検知して検知信号を出力する時点を時系列で示している。この検知時刻は、図5において、画像上のアドレスL1、L2、L3、及びL4に車両が出現する時刻と一致するため、各車両検知器の車両検知時刻における監視カメラ20の映像を解析し、図5に示すように時系列の変化を追うことにより、各車両検知器で検知された車両が同一車両であるか否かを判別することができる。そのため、各車両検知器の検知結果に基づく車両管理で、車両検知器の検知車両を実体の無いゴースト車両と誤認した場合に、その車両検知器の検知車両が実際は何であるかを、監視カメラ20の映像解析から識別し、車両管理上の誤りを直ちに修正することができる。
【0028】
ここでは、車両管理の一例として、ETCレーンに存在する個々の車両に対して、各車両検知器の検知結果を基に、車線制御装置30の車両管理データ生成部31が“車両管理データ”を作成し、また、各車両検知器が検知信号を出力した時点の監視カメラ20の映像を画像処理データ生成部32が解析して“画像処理データ”を作成し、車線制御部34が、車両管理データの誤りを、画像処理データを用いて修正する場合について説明する。
【0029】
図10(a)に示すように、車両管理データには、第1車両検知器S1が車両を検知した時点で設定するカーID(CID)と、その車両に対するETC/非ETC判別結果と、検知した車両検知器の位置を示す位置情報と、その車両検知器の検知時刻を示す時刻情報とを記述する。
また、図10(b)に示すように、画像処理データには、第1車両検知器S1が車両を検知した時点の画像から識別した車両に対して設定するPCIDと、映像解析の契機となった検知信号を出力した車両検知器の位置を示す位置情報と、その車両検知器の検知時刻を示す時刻情報とを記述する。
【0030】
図7のフロー図は、画像処理データ生成部32での画像処理データの作成手順を示している。
車両検知器が検知信号を出力すると(ステップ1)、監視カメラ20の画像を取り込み(ステップ2)、車両検出処理を行い(ステップ3)、検知信号を出力した車両検知器の位置に車両が存在するか否かを識別する。車両が存在しない場合(例えば、飛んで来た新聞紙に反応して検知信号を出力したような場合)は、ステップ1に戻る。車両が存在する場合は、その検知信号を出力した車両検知器が第1車両検知器S1であれば、その車両に対してPCIDを割り当てる(ステップ7)。また、その検知信号を出力した車両検知器が第2〜第4車両検知器S2〜S4であれば、前回の車両検出画像と今回の車両検出画像とを比較し、その車両検出位置の変化から、前回の画像から検出した車両と今回の画像から検出した車両との同一性を確認し、前回の車両検出画像から生成した画像処理データを参照して、その車両のPCIDを識別する(ステップ8)。ステップ7またはステップ8で求めたPCIDを、今回の車両検出画像から生成する画像処理データのPCIDとして記録する。
【0031】
また、この画像処理データの位置情報として、検知信号を出力した車両検知器の位置情報を登録し(ステップ9)、この画像処理データの時刻情報として、その車両検知器が検知信号を出力した時刻を登録する(ステップ10)。この画像処理データを車両管理データが記録されている車両管理テーブル33に記録し(ステップ11)、この画像処理データを用いて、車両管理データの修正処理を行う(ステップ12)。
【0032】
図8のフロー図は、車線制御部34での車両管理データの修正処理の手順を示しており、また、図9及び図11は、この修正処理手順を当てはめた具体例を示している。まず、この具体例から説明する。
【0033】
図9は、ETCレーンに進入した車両の到達位置(各車両検知器S1〜S4の位置)と到達時刻との関係を図示している。図11は、図9の各車両位置で生成される車両管理データ及び画像処理データを示している。例えば、第1車両検知器S1が時刻t1に検知した図9の(1)の車両に対してCID=B1を付与することにより、図11(1)の車両管理データが生成され、車両管理テーブル33に記録される。また、第1車両検知器S1が検知信号を出力した時刻t1の画像を解析して検出した図9の(1)の車両に対してPCID=b1を付与することにより、図11(1)の画像処理データが生成され、車両管理テーブル33に記録される。
【0034】
また、CID=B1の車両が第1車両検知器S1と第2車両検知器S2との間を走行する過程でETC車両と判定されると、この車両が第2車両検知器S2で時刻t2に検知されたとき(図9の(2))、図11(2)の車両管理データが生成され、車両管理テーブルに、同一CID(=B1)の図11(1)の車両管理データに代わって記録される。また、第2車両検知器S2が検知信号を出力した時刻t2の画像を解析して検出した図9の(2)の車両に対して、図11(2)の画像処理データが生成され、車両管理テーブルに、同一PCID(=b1)の図11(1)の画像処理データに代わって記録される。
【0035】
同様に、第3車両検知器S3が時刻t3に車両を検出した時点(図9の(3))で、車両管理テーブルの記録は、図11(3)の車両管理データ及び画像処理データにより更新され、第4車両検知器S4が時刻t4に車両を検出した時点(図9の(4))で、車両管理テーブルの記録は、図11(4)の車両管理データ及び画像処理データにより更新される。位置情報がS4に達した車両管理データ及び画像処理データは、車両がETCレーンを通り過ぎたことを表しているため、車両管理テーブルから削除される。
【0036】
同じように、第1車両検知器S1が時刻t5に検知した車両(図9の(5))に対してCID=B2が付与され、また、PCID=b2が付与されて図11(5)の車両管理データ及び画像処理データが車両管理テーブルに記録され、この車両(ETC車両)を第2車両検知器S2が時刻t6に検知した時点(図9の(6))で車両管理テーブルは図11(6)の車両管理データ及び画像処理データに更新される。
この車両が第3車両検知器S3を通過するときに(図9の(7))、検知ミスが発生すると、第3車両検知器S3から検知信号が出力されないため、図9の(7)の位置に対応する車両管理データ及び画像処理データは生成されない。
【0037】
この車両が時刻t8に第4車両検知器S4の位置に達すると(図9の(8))、第4車両検知器S4は検知信号を出力し、この検知信号が出力された時刻t8の画像を解析して図11(8)の画像処理データが生成され、図11(6)の画像処理データに代わって、車両管理テーブルに記録され、その後、位置情報がS4であるため、車両管理テーブルから削除される。
【0038】
一方、第4車両検知器S4の検知信号に基づいて生成された図11(8)の車両管理データは、第3車両検知器S3が車両を検知していないのに、第4車両検知器S4が車両を検知する筈がないので、廃棄される。
従って、車両管理テーブルには、車両管理データとして図11(6)の車両管理データが残ることになる。
【0039】
次に、第1車両検知器S1が時刻t9に検知した車両(図9の(9))に対してCID=B3が付与され、また、PCID=b3が付与されて図11(9)の車両管理データ及び画像処理データが車両管理テーブルに記録される。この車両が第2車両検知器S2の位置に時刻t10に到達すると、この車両(非ETC車両)を第2車両検知器S2が検知した時点(図9の(10))で図11(10)の車両管理データ及び画像処理データが生成され、車両管理テーブルに記録された同一CID(=B3)及び同一PCID(=b3)の車両管理データ及び画像処理データが更新される。
【0040】
この車両が第3車両検知器S3の位置に時刻t11に到達し、第3車両検知器S3がこの車両を検知して検知信号を出力すると、車両管理テーブルに記録されている車両管理データの記録順序及びその位置情報から見て、この車両はCID=B2の車両と判断できるため、図11(11)の車両管理データが生成され、図11(6)の車両管理データに代わって車両管理テーブルに記録される。
一方、第3車両検知器S3が検知信号を出力した時刻t11の画像を解析して図11(11)の画像処理データが生成され、図11(10)の画像処理データに代わって、車両管理テーブルに記録される。
【0041】
このとき、位置情報(S3)及び時刻情報(t11)が同一の図11(11)の車両管理データと画像処理データとが比較され、車両管理データのCID(=B2)が、画像処理データのPCID(=b3)に対応する車両管理データのCID(=B3)と異なる場合に、車両管理データのCID=B2をCID=B3に修正し、車両管理データのETC/非ETC判別結果を、修正したCID=B3の判別結果(非ETC)に修正する処理が行われ。
また、この修正でCID=B3の車両管理データが出現したため、同一CID(=B3)の図11(8)の車両管理データ及び画像処理データは車両管理テーブルから削除される。
【0042】
こうして車両管理テーブルの車両管理データが修正されたことにより、この車両が第4車両検知器S4の位置に時刻t12に到達したとき(図9の(12))には、第4車両検知器S4の検知信号に基づいて、正常な図11(12)の車両管理データ及び画像処理データが作成され、車両管理テーブルに記録されたデータが更新される。
【0043】
図8のフロー図は、この車両管理データの修正処理手順を一般化して示している。
車両管理テーブルに記入した画像処理データの位置情報がS1であるか否かを識別し(ステップ20)、S1であるときは、その画像処理データの位置情報(S1)及び時刻情報と同一の位置情報(S1)及び時刻情報を有する車両管理データを車両管理テーブルから探し、その車両管理データのCIDと画像処理データのPCIDとを対応付けて記憶する(ステップ21)。また、車両管理テーブルに記入した画像処理データの位置情報がS2〜S4であるときは、その画像処理データの位置情報及び時刻情報と同一の位置情報及び時刻情報を有する車両管理データを車両管理テーブルから探し(ステップ22)、その車両管理データのCID(=Bi)が、画像処理データのPCID(=bk)に対応付けたCID(=Bk)と一致するか否かを識別する(ステップ23)。一致する場合は、車両管理データの修正は行わない。一致しない場合は、車両管理データのCIDを画像処理データのPCID(=bk)に対応付けたCID(=Bk)に修正し、また、車両管理データのETC/非ETC判別結果を、修正したCID(=Bk)の車両のETC/非ETC判別結果に修正する。また、この修正で、車両管理テーブルに同一CIDの車両管理データが複数出現した場合は、時刻情報が最新の車両管理データだけを残し、CIDが重複する他の車両管理データを削除する(ステップ24)。
こうした処理により、車両管理上に現れるゴースト車両を削除することができ、車両管理を正常化することができる。
【0044】
なお、ここでは、検知ミス後の第4車両検知器S4で検知された検知データを破棄し、車両管理テーブル33には記録していないが、この車両検知器の検知データに基づいて位置情報及び時刻情報を記録した車両管理データを車両管理テーブル33に記録し、位置情報及び時刻情報が一致する画像処理データを用いて、車両管理データの不足するCIDを補正し、そのCIDを持つ車両のETC/非ETC判別結果を車両管理データに記述することにより、その車両管理データを再生するようにしても良い。この場合には、ゴースト車両の発生自体を抑制することができる。
【0045】
また、ここでは、車両管理データの誤りを自動修正する場合について説明したが、車両管理テーブルに記録された車両管理データの誤りを検出した時点で警報を出力し、係員の操作で車両管理データを修正するようにしたり、あるいは、警報を出力して車両管理データの誤りを自動修正するようにしたりすることもできる。
【0046】
また、監視カメラ20の遠方に位置する複数の車両が、画像上で重なって映り、後ろ側の車両が車両検知器で検知されたときに、この車両の位置が画像上で判別できない場合でも、図12に示すように、検知信号を出力した車両検知器の位置に車両が存在するものとして、画像処理データを生成するものとする。こうすることにより、車両が監視カメラ20に近付き、個々の車両が画像上で区別できるようになったときに、それぞれの車両に対応付けた画像処理データの生成が可能になる。
【0047】
(第2の実施形態)
第2の実施形態では、レーンを通過する車両を複数の台数の監視カメラで追跡するETCシステムについて説明する。
このシステムでは、監視カメラの画像上で複数の車両が重ならないように、複数の監視カメラでETCレーンを分担して撮影する。図14は、ETCレーンの前後に監視カメラ20及び監視カメラ21を配置する場合を示しており、図13は、これらの監視カメラ20及び監視カメラ21の撮影エリア23、24を示している。
【0048】
また、図15(a)は、ETCレーンの前側の頭上に設置した監視カメラ21の画像を示し、また、図15(b)は、ETCレーンの後側の頭上に設置した監視カメラ20の画像を示している。このように、複数の監視カメラ20、21の画像に共通する車両検知器(この場合は第3車両検知器S3)が映るように、各監視カメラ20、21の撮影エリアを設定することにより、図16に示すように、その共通する車両検知器の位置を通過する車両が、監視カメラ20及び21で同時刻に撮影される。この同時刻に撮影された同一車両の映像を介して、矢印で示すように、監視カメラ21の画像に映る車両を監視カメラ20の画像上で追跡することができる。
車線制御装置の構成は、第1の実施形態(図3)と同じである。ただ、画像処理データ生成部32に監視カメラ20及び21の画像が入力し、画像処理データ生成部32が、監視カメラ20及び21の画像から、それぞれ画像処理データを生成して車両管理テーブル33に書き込む点だけが相違している。
【0049】
図17のフロー図は、画像処理データ生成部32における画像処理データの作成手順を示している。
ここで、ステップ30からステップ40は、監視カメラ21の画像から画像処理データ1を作成する手順であり、ステップ41からステップ51は、監視カメラ20の画像から画像処理データ2を作成する手順である。これらの手順は、第1の実施形態で説明した画像処理データの作成手順(図7)と基本的に同じであり、以下に示す点だけが相違している。
【0050】
画像処理データ1の作成は、第1、第2及び第3車両検知器S1、S2、S3が検知信号を出力したときにだけ行い(ステップ30)、画像処理データ1のPCIDにはPCID1を使用する(ステップ36、ステップ37)。
また、画像処理データ2の作成は、第3及び第4車両検知器S3、S4が検知信号を出力したときにだけ行う(ステップ41)。また、第3車両検知器S3が検知信号を出力したときに第3車両検知器S3の位置に存在する車両に対してPCID2を付与し(ステップ47)、画像処理データ2のPCIDは、このPCID2を使用する(ステップ48)。
こうして生成された画像処理データ1及び画像処理データ2は、車両管理テーブル33に記録され(ステップ40、51)、これらの画像処理データを用いて、車両管理データの修正処理が行われる(ステップ52)。
【0051】
図18のフロー図は、車線制御部34が画像処理データ1及び画像処理データ2を用いて車両管理データを修正する処理手順を示している。
車両管理テーブルに記入された画像処理データが画像処理データ1であるか画像処理データ2であるかを識別し(ステップ60)、画像処理データ1の場合はステップ61〜ステップ64の修正処理を行い、画像処理データ2の場合はステップ65〜ステップ68の修正処理を行う。
【0052】
この修正処理自体は、第1の実施形態で説明した修正処理(図8)と基本的に同じである。
画像処理データ1を用いる修正処理では、PCIDとしてPCID1を用いる点だけが相違している(ステップ64)が、その他は変わりがない。
【0053】
また、画像処理データ2を用いる修正処理では、監視カメラ21と監視カメラ20との撮影エリアに共通して存在する第3車両検知器S3の位置を位置情報に持ち、時刻情報が同じ画像処理データ1と画像処理データ2とを比較して、PCID2に対応するPCID1を求める。次いで、ステップ62で対応付けた、そのPCID1に対応する車両管理データのCIDを求め、PCID2に対応するCIDを得る(ステップ66)。
【0054】
画像処理データ2の位置情報がS4であるときは、その画像処理データ2の位置情報及び時刻情報と同一の位置情報及び時刻情報を有する車両管理データを車両管理テーブルから探し(ステップ67)、その車両管理データのCID(=Bi)が、画像処理データ2のPCID2(=bk)に対応付けたCID(=Bk)と一致するか否かを識別し(ステップ68)、一致しない場合に、車両管理データのCIDを画像処理データ2のPCID2(=bk)に対応付けたCID(=Bk)に修正し、また、車両管理データのETC/非ETC判別結果を、修正したCID(=Bk)の車両のETC/非ETC判別結果に修正する。また、この修正で、車両管理テーブルに同一CIDの車両管理データが複数出現した場合は、時刻情報が最新の車両管理データだけを残し、CIDが重複する他の車両管理データを削除する(ステップ69)。
【0055】
このように、複数の監視カメラを用いることにより、ETCレーンを走行する車両を重ならずに映すことができ、この画像から生成した画像処理データを用いて車両管理データの誤りを的確に修正することができる。
【0056】
なお、ここでは2台の監視カメラを用いる場合について説明したが、3台以上の監視カメラを用いることも可能である。この場合も、隣接する撮影エリアが共通の車両検知器を含むように、その撮影エリアを設定する。
また、各実施形態で説明した車両管理の方法は、一つの例であって、本発明はそれに限定されるものでは無い。
【0057】
【発明の効果】
以上の説明から明らかなように、本発明のETCシステム及び車両管理方法では、車両が通過したか否かのみを検出する車両検知器の情報と監視カメラの画像情報とを組み合わせることにより、それぞれの車両検知器で検知された車両が同じ車両であるかどうかを識別することが可能になり、その結果、車両管理ズレを修正することができる。
【0058】
本発明は、どのような料金徴収方式のETCゲートにも適用することができ、また、非ETC車両がレーンを走行する場合でも、その車両管理を的確に行うことができる。
【図面の簡単な説明】
【図1】本発明の第1の実施形態における監視カメラの撮影エリアを示す図、
【図2】本発明の第1の実施形態におけるETCレーンを示す図、
【図3】本発明の第1の実施形態における車線制御装置の構成を示すブロック図、
【図4】本発明の第1の実施形態における監視カメラの画像を示す図、
【図5】本発明の第1の実施形態における画像処理で得られる車両画像の時系列を示す図、
【図6】本発明の第1の実施形態における車両検知器の検知信号の時系列を示す図、
【図7】本発明の第1の実施形態における画像処理データの生成手順を示すフロー図、
【図8】本発明の第1の実施形態における車両管理データの修正処理手順を示すフロー図、
【図9】本発明の第1の実施形態における車両管理データの修正処理を説明する説明図、
【図10】本発明の第1の実施形態における車両管理データ及び画像処理データのデータ構造を示す図、
【図11】本発明の第1の実施形態における車両管理データ及び画像処理データの具体例を示す図、
【図12】本発明の第1の実施形態における重畳車両が分離する時系列変化を示す図、
【図13】本発明の第2の実施形態における監視カメラの撮影エリアを示す図、
【図14】本発明の第2の実施形態におけるETCレーンを示す図、
【図15】本発明の第2の実施形態における監視カメラの画像を示す図、
【図16】本発明の第2の実施形態における画像処理で得られる車両画像の時系列を示す図、
【図17】本発明の第2の実施形態における画像処理データの生成手順を示すフロー図、
【図18】本発明の第2の実施形態における車両管理データの修正処理手順を示すフロー図、
【図19】従来のETCシステムの料金所のゲートを示す斜視図、
【図20】従来のETCシステムの料金所のゲートを示す平面図、
【図21】従来のETCシステムの料金所の構成を示す機能ブロック図、
【図22】従来のETCシステムの路車間通信領域を示す図、
【図23】従来の車両検知器を示す図、
【図24】従来のETCシステムでの車両管理を説明する図である。
【符号の説明】
S1 第1車両検知器
S2 第2車両検知器
S3 第3車両検知器
S4 第4車両検知器
10 アンテナ
11 路側表示器
12 遮断機
13 ブース
14 車両
15 車線制御装置
16 路側無線装置
17 アイランド
20 監視カメラ
21 監視カメラ
22 撮影エリア
23 撮影エリア
24 撮影エリア
30 車線制御装置
31 車両管理データ生成部
32 画像処理データ生成部
33 車両管理テーブル
34 車線制御部
35 時計
Claims (8)
- 通過車両を検知する複数の車両検知手段と、前記通過車両を撮影する撮影手段とを備え、前記複数の車両検知手段により検知された車両の同一性を、前記撮影手段が撮影した映像を用いて判別することを特徴とする自動料金収受システム。
- 前記複数の車両検知手段の車両検知情報に基づいて、前記複数の車両検知手段が配置された区間に存在する車両の車両位置情報を管理し、前記車両検知手段の検知ミスで生じる前記車両位置情報の誤りを、前記撮影手段が撮影した映像を用いて検出することを特徴とする請求項1に記載の自動料金収受システム。
- 前記車両位置情報の誤りが検出されたとき、警報を出力することを特徴とする請求項2に記載の自動料金収受システム。
- 前記車両位置情報の誤りが検出されたとき、前記誤りを車線制御装置が修正することを特徴とする請求項2または3に記載の自動料金収受システム。
- 前記撮影手段は、前記複数の車両検知手段が配置された区間の全域を撮影することを特徴とする請求項2に記載の自動料金収受システム。
- 前記撮影手段として複数の撮影手段を備え、前記複数の撮影手段が前記区間の全域を分担して撮影することを特徴とする請求項5に記載の自動料金収受システム。
- 通過車両を検知する複数の車両検知手段の車両検知情報に基づいて、前記複数の車両検知手段が配置された区間に存在する車両の車両位置情報を管理する車両管理方法において、
前記区間の全域を撮影手段で撮影し、前記車両検知手段の各々が車両を検知した時点の前記撮影手段の映像を用いて、前記車両検知手段が検知した車両と隣接する前記車両検知手段が検知した車両との同一性を識別し、前記車両位置情報の誤りを検出することを特徴とする車両管理方法。 - 前記区間の全域を複数の撮影手段で分担して撮影し、前記撮影手段の各々が撮影する撮影エリアは、隣接する前記撮影エリアと一部が重なり、重なったエリアに前記車両検出手段の少なくとも一つが含まれるように設定することを特徴とする請求項7に記載の車両管理方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002161618A JP2004013207A (ja) | 2002-06-03 | 2002-06-03 | 自動料金収受システムと車両管理方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002161618A JP2004013207A (ja) | 2002-06-03 | 2002-06-03 | 自動料金収受システムと車両管理方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2004013207A true JP2004013207A (ja) | 2004-01-15 |
Family
ID=30430640
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002161618A Withdrawn JP2004013207A (ja) | 2002-06-03 | 2002-06-03 | 自動料金収受システムと車両管理方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2004013207A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006209428A (ja) * | 2005-01-27 | 2006-08-10 | Toshiba Corp | 料金収受システム |
| WO2017109127A1 (fr) * | 2015-12-23 | 2017-06-29 | Thales | Procédé de détection d'un timon d'attelage et produit programme d'ordinateur associé |
| WO2023157343A1 (ja) * | 2022-02-17 | 2023-08-24 | 日立Astemo株式会社 | 車両認識システム及びサーバ |
-
2002
- 2002-06-03 JP JP2002161618A patent/JP2004013207A/ja not_active Withdrawn
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006209428A (ja) * | 2005-01-27 | 2006-08-10 | Toshiba Corp | 料金収受システム |
| WO2017109127A1 (fr) * | 2015-12-23 | 2017-06-29 | Thales | Procédé de détection d'un timon d'attelage et produit programme d'ordinateur associé |
| FR3046278A1 (fr) * | 2015-12-23 | 2017-06-30 | Thales Sa | Procede de detection d'un timon d'attelage et produit programme d'ordinateur associe |
| WO2023157343A1 (ja) * | 2022-02-17 | 2023-08-24 | 日立Astemo株式会社 | 車両認識システム及びサーバ |
| JP2023119740A (ja) * | 2022-02-17 | 2023-08-29 | 日立Astemo株式会社 | 車両認識システム及びサーバ |
| JP7709401B2 (ja) | 2022-02-17 | 2025-07-16 | Astemo株式会社 | 車両認識システム及びサーバ |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| ES2282395T3 (es) | Sistema y procedimiento para leer placas de matricula. | |
| US6538580B2 (en) | Method and device for registering the outer characteristics of a vehicle in a road toll unit | |
| US6747687B1 (en) | System for recognizing the same vehicle at different times and places | |
| US7630515B2 (en) | Method of and apparatus for setting image-capturing conditions, and computer program | |
| KR101710646B1 (ko) | 영상추적을 이용한 차량 전후 번호판 인식 시스템 | |
| JP5789170B2 (ja) | 駐車場管理システム | |
| WO2008027221A2 (en) | Method and system to detect tailgating and automatically issue a citation | |
| KR101880243B1 (ko) | 차량번호와 하이패스 단말고유번호의 매칭 정확도를 향상시킨 다차로 기반 하이패스 시스템 | |
| JP2808513B2 (ja) | 電子的通行料金収受システム | |
| JP2016021200A (ja) | 判定方法、判定システム、及び判定装置 | |
| JP4961305B2 (ja) | 有料道路自動料金所の車両監視装置 | |
| KR102205057B1 (ko) | 동일 차량 검출 장치, 요금 수수 설비, 동일 차량 검출 방법 및 프로그램 | |
| KR101538592B1 (ko) | 차량번호 오인식 자동제어 주차관리시스템 | |
| KR100941528B1 (ko) | 차량 번호판 보존 시스템 및 그 운영 방법 | |
| JP2015187897A (ja) | 駐車場管理システム | |
| JP2009048225A (ja) | 車両認識装置及び車両認識方法 | |
| KR100382460B1 (ko) | 요금 징수방법 | |
| JP2004013207A (ja) | 自動料金収受システムと車両管理方法 | |
| CN106530739A (zh) | 一种基于多摄像装置的车牌识别方法、装置及其系统 | |
| JP4086519B2 (ja) | 自動料金収受システム | |
| JP2739021B2 (ja) | 車輌識別装置 | |
| JP4064745B2 (ja) | Etc動作分析システム | |
| JP2002032890A (ja) | 不正車両情報取得方法及びその装置 | |
| JP5320096B2 (ja) | 不正通過車両管理システム及び不正通過車両管理方法 | |
| JP2003281581A (ja) | 自動料金収受レーンの車両管理装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050601 |
|
| A761 | Written withdrawal of application |
Free format text: JAPANESE INTERMEDIATE CODE: A761 Effective date: 20070614 |