JP2004103018A - 車両の周辺監視装置 - Google Patents
車両の周辺監視装置 Download PDFInfo
- Publication number
- JP2004103018A JP2004103018A JP2003309717A JP2003309717A JP2004103018A JP 2004103018 A JP2004103018 A JP 2004103018A JP 2003309717 A JP2003309717 A JP 2003309717A JP 2003309717 A JP2003309717 A JP 2003309717A JP 2004103018 A JP2004103018 A JP 2004103018A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- image
- coordinates
- collision
- real space
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images












Landscapes
- Length Measuring Devices By Optical Means (AREA)
- Measurement Of Optical Distance (AREA)
- Image Processing (AREA)
- Traffic Control Systems (AREA)
- Image Analysis (AREA)
Abstract
【解決手段】 2つの赤外線カメラ1R,1Lにより得られる画像から、車両周辺の対象物の実空間上の位置を、車両に固定された座標系(X,Y,Z)を用いて検出する。車両と対象物との距離(Z方向の座標)と、車両進行方向に対して90°の水平方向(X方向)の、当該対象物の座標との比が、ほぼ一定であるとき、その対象物が衝突する可能性があると判定する。
【選択図】 図1
Description
前記判定手段により対象物との衝突の可能性が高いと判定されたとき、運転者に警告を発する警報手段を備え、該警告手段は、運転者がブレーキ操作を行っている場合であって、そのブレーキ操作による加速度が所定閾値より大きいときは、警報を発しないようにすることが望ましい。運転者がすでに対象物に気づいて適切なブレーキ操作を行っている場合は警告を発しないようにして、運転者によけいな煩わしさを与えないようにすることができる。
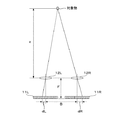
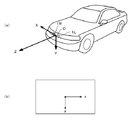
図1は本発明の一実施形態にかかる車両の周辺監視装置の構成を示す図であり、この装置は、遠赤外線を検出可能な2つの赤外線カメラ1R,1Lと、当該車両のヨーレートを検出するヨーレートセンサ5と、当該車両の走行速度(車速)VCARを検出する車速センサ6と、ブレーキの操作量を検出するためのブレーキセンサ7と、これらのカメラ1R,1Lによって得られる画像データの基づいて車両前方の動物等の対象物を検出し、衝突の可能性が高い場合に警報を発する画像処理ユニット2と、音声で警報を発するためのスピーカ3と、カメラ1Rまたは1Lによって得られる画像を表示するとともに、衝突の可能性が高い対象物を運転者に認識させるためのヘッドアップディスプレイ(以下「HUD」という)4とを備えている。
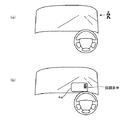
HUD4は、図2に示すように、車両10のフロントウインドウの、運転者の前方位置に画面4aが表示されるように設けられている。
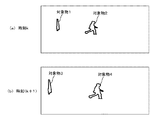
|xj(k+1)−xi(k)|<Δx
|yj(k+1)−yi(k)|<Δy
であること。ただし、Δx、Δyは、それぞれx方向及びy方向の画像上の移動量の許容値である。
Sj(k+1)/Si(k)<1±ΔS
であること。ただし、ΔSは面積変化の許容値である。
ASPECTj(k+1)/ASPECTi(k)<1±ΔASPECT
であること。ただし、ΔASPECTは縦横比変化の許容値である。
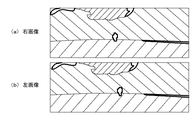
なお以上説明したステップS14〜S19の処理は、2値化した基準画像(本実施形態では、右画像)ついて実行する。
(X−Xav)/lx=(Y−Yav)/ly=(Z−Zav)/lz
…(5a)
s=lx・DX(j)+ly・DY(j)+lz・DZ(j) (6)
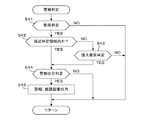
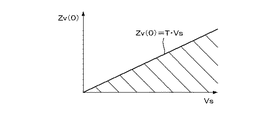
ステップS41では、下記式(9)によりZ方向の相対速度Vsを算出し、下記式(10)及び(11)が成立するとき、衝突の可能性があると判定してステップS42に進み、式(10)及び/または式(11)が不成立のときは、この処理を終了する。
Vs=(Zv(N−1)−Zv(0))/ΔT (9)
Zv(0)/Vs≦T (10)
|Yv(0)|≦H (11)
式(10)の関係を図示すると図17に示すようになり、検出した相対速度Vsと距離Zv(0)とに対応する座標が、ハッチングを付した領域にあり、かつ|Yv(0)|≦Hであるとき、ステップS42以下の判定が実行される。
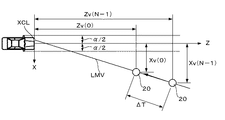
続くステップS42では、対象物が接近判定領域AR1内にあるか否かを判別し、この答が肯定(YES)であるときは、直ちにステップS44に進む一方、否定(NO)であるときは、ステップS43で侵入衝突判定を行う。具体的には、画像上での最新のx座標xc(0)(cは前述したように画像の中心位置を実空間原点Oに一致させる補正を行った座標であることを示すために付している)と、時間ΔT前のx座標xc(N−1)との差が下記式(12)を満たすか否かを判別し、満たす場合に衝突の可能性が高いと判定する。
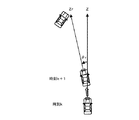
一方近似直線LMVをXZ平面に投影した直線は、下記式(14)で与えられる。
Xv(0)=xc(0)×Zv(0)/f (16)
Xv(N−1)=xc(N−1)×Zv(N−1)/f (17)
であり、これらを式(15)に適用すると、交点X座標XCLは下記式(18)で与えられる。これを式(13)に代入して整理することにより、式(12)の条件が得られる。
ステップS44では、以下のようにして警報出力判定、すなわち警報出力を行うか否かの判定を行う。先ずブレーキセンサ7の出力から自車両10の運転者がブレーキ操作を行っているか否かを判別し、ブレーキ操作を行っていなければ直ちにステップS45に進んで、警報出力を行う。ブレーキ操作を行っている場合には、それによって発生する加速度Gs(減速方向を正とする)を算出し、この加速度Gsが所定閾値GTH以下であるときは、ステップS45に進む一方、Gx>GTHであるときは、ブレーキ操作により衝突が回避されると判定して本処理を終了する。これにより、適切なブレーキ操作が行われているときは、警報を発しないようにして、運転者に余計な煩わしさを与えないようにすることができる。
また、対象物の相対移動軌跡を近似する近似直線LMVを求め、検出位置がこの近似直線上の位置するように位置座標を補正し、補正後の位置座標から移動ベクトルを求めるようにしたので、検出位置の誤差の影響を軽減してより正確な衝突可能性の判定を行うことができる。
また車幅αを考慮した衝突判定を行うようにしたので、衝突の可能性を正確に判定し、無用の警報を発することを防止することができる。
また上述した実施形態では、車両の前方を監視する例を示したが、車両の後方などいずれの方向を監視するようにしてもよい。
2 画像処理ユニット(相対位置検出手段、実空間位置算出手段、判定手段、警報手段)
3 スピーカ(警報手段)
4 ヘッドアップディスプレイ(警報手段)
5 ヨーレートセンサ
6 車速センサ
7 ブレーキセンサ
Claims (2)
- 車両に搭載された撮像手段により得られる画像から当該車両の周辺に存在する対象物を検出する車両の周辺監視装置において、
前記撮像手段により得られる画像から前記対象物の当該車両に対する相対位置を位置データとして検出する相対位置検出手段と、
該相対位置検出手段により検出される、前記対象物についての位置データに基づいてその対象物の実空間での位置を算出する実空間位置算出手段と、
該実空間位置算出手段により算出された前記対象物までの距離と、前記対象物の、前記車両の進行方向に対して90度の水平方向の座標との比が、ほぼ一定である場合に、前記対象物が前記車両に衝突する可能性があると判定する判定手段とを備えることを特徴とする車両の周辺監視装置。 - 前記判定手段は、当該車両の車幅に応じた衝突判定条件を用いて前記判定を行うことを特徴とする請求項1に記載の車両の周辺監視装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003309717A JP3949628B2 (ja) | 2003-09-02 | 2003-09-02 | 車両の周辺監視装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003309717A JP3949628B2 (ja) | 2003-09-02 | 2003-09-02 | 車両の周辺監視装置 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP17672799A Division JP3515926B2 (ja) | 1999-06-23 | 1999-06-23 | 車両の周辺監視装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2004103018A true JP2004103018A (ja) | 2004-04-02 |
| JP3949628B2 JP3949628B2 (ja) | 2007-07-25 |
Family
ID=32290713
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003309717A Expired - Fee Related JP3949628B2 (ja) | 2003-09-02 | 2003-09-02 | 車両の周辺監視装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3949628B2 (ja) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7778770B2 (en) | 2005-03-31 | 2010-08-17 | Honda Motor Co., Ltd. | Communication system between vehicles |
| JP2012002584A (ja) * | 2010-06-15 | 2012-01-05 | Yokosuka Telecom Research Park:Kk | 測位装置及び測位方法 |
| CN103287337A (zh) * | 2013-06-26 | 2013-09-11 | 宁夏新航信息科技有限公司 | Gps的生命检测系统 |
| DE102014217233A1 (de) | 2013-08-29 | 2015-03-05 | Denso Corporation | Kollisionswahrscheinlichkeitsbestimmungsvorrichtung und Programm |
| CN105403187A (zh) * | 2015-12-14 | 2016-03-16 | 长春轨道客车股份有限公司 | 一种高速动车组车体三维尺寸检测方法 |
| US9418428B2 (en) | 2012-07-02 | 2016-08-16 | Nec Corporation | Position management device, position management system, position management method, and position management program |
| JP2017151726A (ja) * | 2016-02-24 | 2017-08-31 | 株式会社デンソー | 衝突予測装置 |
| WO2020062032A1 (en) * | 2018-09-28 | 2020-04-02 | Baidu.Com Times Technology (Beijing) Co., Ltd. | A pedestrian probability prediction system for autonomous vehicles |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07105497A (ja) * | 1993-10-05 | 1995-04-21 | Mitsubishi Electric Corp | 車間距離検知装置 |
| JPH07209418A (ja) * | 1993-12-14 | 1995-08-11 | Thomson Csf | モータビークル用衝突防止装置 |
| JPH0845000A (ja) * | 1994-07-28 | 1996-02-16 | Fuji Heavy Ind Ltd | 車間距離制御装置 |
| JPH09226490A (ja) * | 1996-02-22 | 1997-09-02 | Nippon Soken Inc | 横断物の検出装置 |
| JPH09326032A (ja) * | 1996-06-06 | 1997-12-16 | Fuji Heavy Ind Ltd | 車両周辺立体物認識装置 |
| JPH10143245A (ja) * | 1996-11-07 | 1998-05-29 | Komatsu Ltd | 移動体の障害物衝突防止装置 |
| JPH10285582A (ja) * | 1997-04-04 | 1998-10-23 | Fuji Heavy Ind Ltd | 車外監視装置 |
-
2003
- 2003-09-02 JP JP2003309717A patent/JP3949628B2/ja not_active Expired - Fee Related
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07105497A (ja) * | 1993-10-05 | 1995-04-21 | Mitsubishi Electric Corp | 車間距離検知装置 |
| JPH07209418A (ja) * | 1993-12-14 | 1995-08-11 | Thomson Csf | モータビークル用衝突防止装置 |
| JPH0845000A (ja) * | 1994-07-28 | 1996-02-16 | Fuji Heavy Ind Ltd | 車間距離制御装置 |
| JPH09226490A (ja) * | 1996-02-22 | 1997-09-02 | Nippon Soken Inc | 横断物の検出装置 |
| JPH09326032A (ja) * | 1996-06-06 | 1997-12-16 | Fuji Heavy Ind Ltd | 車両周辺立体物認識装置 |
| JPH10143245A (ja) * | 1996-11-07 | 1998-05-29 | Komatsu Ltd | 移動体の障害物衝突防止装置 |
| JPH10285582A (ja) * | 1997-04-04 | 1998-10-23 | Fuji Heavy Ind Ltd | 車外監視装置 |
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7778770B2 (en) | 2005-03-31 | 2010-08-17 | Honda Motor Co., Ltd. | Communication system between vehicles |
| JP2012002584A (ja) * | 2010-06-15 | 2012-01-05 | Yokosuka Telecom Research Park:Kk | 測位装置及び測位方法 |
| US9418428B2 (en) | 2012-07-02 | 2016-08-16 | Nec Corporation | Position management device, position management system, position management method, and position management program |
| CN103287337A (zh) * | 2013-06-26 | 2013-09-11 | 宁夏新航信息科技有限公司 | Gps的生命检测系统 |
| DE102014217233A1 (de) | 2013-08-29 | 2015-03-05 | Denso Corporation | Kollisionswahrscheinlichkeitsbestimmungsvorrichtung und Programm |
| US9711049B2 (en) | 2013-08-29 | 2017-07-18 | Denso Corporation | Collision probability determination apparatus and program |
| CN105403187A (zh) * | 2015-12-14 | 2016-03-16 | 长春轨道客车股份有限公司 | 一种高速动车组车体三维尺寸检测方法 |
| JP2017151726A (ja) * | 2016-02-24 | 2017-08-31 | 株式会社デンソー | 衝突予測装置 |
| WO2020062032A1 (en) * | 2018-09-28 | 2020-04-02 | Baidu.Com Times Technology (Beijing) Co., Ltd. | A pedestrian probability prediction system for autonomous vehicles |
| CN111328411A (zh) * | 2018-09-28 | 2020-06-23 | 百度时代网络技术(北京)有限公司 | 用于自动驾驶车辆的行人概率预测系统 |
| JP2021501712A (ja) * | 2018-09-28 | 2021-01-21 | バイドゥ ドットコム タイムス テクノロジー (ベイジン) カンパニー リミテッド | 自動運転車両のための歩行者確率予測システム |
| US11230297B2 (en) | 2018-09-28 | 2022-01-25 | Baidu Usa Llc | Pedestrian probability prediction system for autonomous vehicles |
Also Published As
| Publication number | Publication date |
|---|---|
| JP3949628B2 (ja) | 2007-07-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3515926B2 (ja) | 車両の周辺監視装置 | |
| JP4615139B2 (ja) | 車両の周辺監視装置 | |
| JP3739693B2 (ja) | 画像認識装置 | |
| JP3764086B2 (ja) | 車両用情報提供装置 | |
| JP5503728B2 (ja) | 車両の周辺監視装置 | |
| US8144195B2 (en) | Vehicle zone monitoring apparatus | |
| JP4410292B1 (ja) | 車両の周辺監視装置 | |
| WO2011108198A1 (ja) | 車両の周辺監視装置 | |
| JP2001169310A (ja) | 距離検出装置 | |
| JP3919975B2 (ja) | 車両の周辺監視装置 | |
| JP3916930B2 (ja) | 進入警報装置 | |
| JP3949628B2 (ja) | 車両の周辺監視装置 | |
| JP2009075124A (ja) | 距離検出装置 | |
| JP3910345B2 (ja) | 位置検出装置 | |
| JP2010089661A (ja) | 車両の周辺監視装置 | |
| JP4943403B2 (ja) | 車両の周辺監視装置 | |
| JP4176558B2 (ja) | 車両周辺表示装置 | |
| JP4567072B2 (ja) | 車両周辺監視装置 | |
| JP3961269B2 (ja) | 障害物警報装置 | |
| JP2002005656A (ja) | 位置検出装置 | |
| JP3859429B2 (ja) | 移動対象物検出装置 | |
| JP4040657B2 (ja) | 移動対象物検出装置 | |
| JP2003309843A (ja) | 障害物警報装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20040729 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20051102 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20051227 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20060220 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070109 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070302 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20070403 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20070418 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110427 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110427 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130427 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130427 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140427 Year of fee payment: 7 |
|
| LAPS | Cancellation because of no payment of annual fees |