JP2004122094A - 破砕機 - Google Patents
破砕機 Download PDFInfo
- Publication number
- JP2004122094A JP2004122094A JP2002323178A JP2002323178A JP2004122094A JP 2004122094 A JP2004122094 A JP 2004122094A JP 2002323178 A JP2002323178 A JP 2002323178A JP 2002323178 A JP2002323178 A JP 2002323178A JP 2004122094 A JP2004122094 A JP 2004122094A
- Authority
- JP
- Japan
- Prior art keywords
- pressing plate
- crushing blade
- crushing
- crusher
- crushed
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 230000004308 accommodation Effects 0.000 claims abstract description 8
- 238000010276 construction Methods 0.000 abstract 1
- 230000002093 peripheral effect Effects 0.000 abstract 1
- 238000001514 detection method Methods 0.000 description 9
- 239000000463 material Substances 0.000 description 7
- 229920003023 plastic Polymers 0.000 description 7
- 239000004033 plastic Substances 0.000 description 7
- 238000010008 shearing Methods 0.000 description 6
- 230000008602 contraction Effects 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 239000004698 Polyethylene Substances 0.000 description 1
- 230000006835 compression Effects 0.000 description 1
- 238000007906 compression Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- -1 polyethylene Polymers 0.000 description 1
- 229920000573 polyethylene Polymers 0.000 description 1
- 239000002699 waste material Substances 0.000 description 1
Images







Landscapes
- Crushing And Pulverization Processes (AREA)
Abstract
【課題】従来の破砕機においては、被破砕物を押圧する押圧板の駆動手段として油圧シリンダのシリンダロッドを押圧板の背面に接続し、油圧シリンダの伸縮動作にて押圧板を往復移動させる構成では、押圧板の往復移動範囲すなわちシリンダロッドの伸縮範囲からさらに油圧シリンダ本体が飛び出し、機体の押圧方向の寸法が長くなり機体が大きくなる。
【解決手段】押圧板を往復移動させる往復駆動手段を螺合体により構成し収容室の外周面に押圧方向と平行に配置するとともに、押圧板の往復移動範囲内に納めることにより機体寸法のコンパクトな破砕機を提供することができる。
【選択図】 図4
【解決手段】押圧板を往復移動させる往復駆動手段を螺合体により構成し収容室の外周面に押圧方向と平行に配置するとともに、押圧板の往復移動範囲内に納めることにより機体寸法のコンパクトな破砕機を提供することができる。
【選択図】 図4
Description
【0001】
【産業上の利用分野】
本発明は、廃棄物を破砕減容処理する破砕機の押圧板の駆動手段の改良に関する。
【0002】
【従来の技術】
従来技術による破砕機の被破砕物を押圧する押圧板の駆動手段は、特開平10−109044号公報によるものが知られる。この破砕機による押圧板の駆動手段は、押圧板を往復移動されるため押圧板の背面に油圧シリンダのシリンダロッドが接続され、油圧シリンダの伸縮動作に従い、押圧板を往復移動させるものである。
【0003】
【発明が解決しようとする課題】
上記のような押圧板駆動手段では、押圧板の往復移動範囲すなわちシリンダロッドの伸縮範囲からさらに油圧シリンダ本体が飛び出してしまうため、機体の押圧方向寸法が長くなってしまい機体が大型化するという問題点と、配置スペースが大きくなってしまうという問題点がある。そこで本発明は、上記問題点を解決するものであり、機体をコンパクトにし配置スペースを少なくした破砕機を実現することである。
【0004】
【課題を解決するための手段】
破砕刃と、被破砕物を収容する収容室と、収容室内部に破砕刃へ向け被破砕物を押し込む押圧板と、この押圧板を往復移動させる往復駆動手段を備えた破砕機において、前記往復駆動手段を押圧方向と平行に配置するとともに前記押圧板の略往復移動範囲に納め、前記往復駆動手段はスクリュー軸と、このスクリュー軸と螺合する押圧板とから構成され、前記スクリュー軸を正逆転させることにより押圧板を往復移動させることを特徴とした破砕機を提供する。
【0005】
【作用】
以上のような構成にすることにより、押圧板の駆動手段が押圧板の往復移動範囲内に納まり、機体がコンパクトで省スペースで配置できる破砕機を提供することが可能となる。
【0006】
【発明の実施の形態】
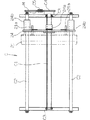
図1は本発明を実施した一軸破砕機の平面断面図であり、図2は本発明を実施した一軸破砕機の正面断面図である。図3は本発明を実施した破砕機の押圧板の往復駆動手段を示す平面図であり、、図4は本発明を実施した一軸破砕機の破砕刃部の斜視図である。図5は本発明を実施した一軸破砕機の破砕刃要部断面図であり、図6は本発明を実施した一軸破砕機の破砕作用図である。図7は本発明を実施した一軸破砕機で剪断破砕されているプラスチック容器の平面図であり、図8は破砕機における破砕作業の制御手段を示すフローチャートである。
【0007】
図1、図2に示すように、1は機体フレームで、機体フレーム1の上部には、被破砕物を収容する収容室2が設けられ、この収容室2内には往復移動可能とした押圧板21が設けられ、この押圧板21を往復移動させる往復駆動手段Cとで押圧ユニットAが構成されている。押圧板21の進行方向には破砕刃ユニットBが形成され、この破砕刃ユニットB内には駆動軸31の周上に装着した破砕刃3が設けられ、駆動軸31が駆動モータM1でチェーン駆動されることにより破砕刃3が矢印R方向に回転するようになっている。破砕刃3の回転方向と対向するように第1固定刃41と第2固定刃42が破砕刃回転中心Oに向け設けられ、断面が円弧で複数の孔を設けた排出スクリーン5が破砕刃3に沿うように配置され、一定形状に破砕された破砕物のみ排出するよう構成されている。又、これら各ユニットを制御する制御回路を備えた電装ボックス6が機体フレーム内に備え制御手段を構成している。
【0008】
更に、上記各構成について詳述する。押圧ユニットAには水平方向に伸びる断面形状が短形の筒状で形成される収容室2と、収容室2の上面には被破砕物を投入する投入口が開口し投入扉22が開閉自在に設けてあり、投入扉22が閉じている時に、接するよう投入扉閉センサS1が設けてある。下面の底板23には破砕刃ユニットB方向に向け細長形状に切り欠いたスリット23aを有し、内設した押圧板21の背面に設けたガイド体21aが底板23に開口したスリット23aから下方に突設し、スリット23aに添って摺動自在とし往復駆動手段Cと連結され、収容室2内に収容された被破砕物を破砕刃ユニットBに向け押込み可能である。
【0009】
往復駆動手段Cは収納室2の下面に設けた底板23の下方外面に配置され、図3に示すように押圧方向に平行で回転自在に両端を軸支した1本のスクリュー軸C1とスクリュー軸C1の軸方向に平行で左右に2本のガイド軸C2を設け構成され、スクリュー軸C1と螺合するスクリューナット24aと、ガイド軸C2に摺動自在に挿入するガイドパイプ24bとを備えたスライド体24が底板23に開口したスリット23aから突設するガイド体21aの下端部と連結される。回転自在にしたスクリュー軸C1はベアリングC3で両端を支持され一端が突出しこの端部にはスプロケットC4が設けられる。
【0010】
機体フレーム1枠内に配置された押圧モータM2とスプロケットC4の間はチェーンC5で架設され、押圧モータM2が正逆転することによりスクリュー軸C1が正逆転しスクリューナット24aを備えたスライド体24を往復動作し、スライド体24が往復運動することにより連結するガイド体21aを背面に備えた押圧板21が往復動作し、押圧開始端には押圧板原点センサS2と押圧終了端には押圧板前進端センサS3が収容室下部にガイド体21aと接するよう備えてある。ガイド軸C2に摺動自在に挿入するガイドパイプ24bをスライド体24に備えることにより、押圧板が前後左右に傾くことがなくスムーズな往復移動が可能となる。
【0011】
破砕刃ユニットBには角形スプラインを有する駆動軸31が押圧方向に直交する向きで設けられ、その周上には複数の被嵌合部を有する破砕刃3がスプラインに嵌合し軸方向に列設されている。駆動軸31はベアリング32で両端を支持され、支持フレーム36にて回転自在に固定される。駆動軸31の一端にはスプロケット33が設けられている。機体フレーム1枠内に配置された駆動モータM1とスプロケット33の間はチェーン34で架設され、駆動軸31がチェーン駆動されることにより破砕刃3が矢印R方向に回転するようになっている。他方端には回転数検出板37が設けられ、支持フレームには回転数検出センサS4が回転数検出板37と近接するよう配置されている。
【0012】
図4に示すように、駆動軸31に列設される破砕刃3は大径破砕刃3aと小径破砕刃3bを交互に列設させ、大径破砕刃3a及び小径破砕刃3bの刃先がそれぞれ螺旋を形成するよう駆動軸31の角形スプラインの嵌合部に対し破砕刃3の被嵌合部を所定の角度異相させ配置する。この配列にすることにより、剪断破砕時の被破砕物に対する刃先の剪断作用が1ヵ所づつ異相して連続的に行なわれるため、剪断作用が分散されて低負荷状態での破砕作業が行なえる。
【0013】
図5に示すように、第1固定刃41は破砕刃ユニットBと収容室2の連結部付近で機体フレーム1に固定され、収容室2の底板23から破砕刃回転中心Oに向け、せり上がるよう角度を設け剪断位置を底板23より上方になるよう配置される。第2固定刃42は破砕刃ユニットBの上面の天板35に固定され、第1固定刃41に対し、破砕刃回転中心Oでの対称位置となり、受け面は破砕刃回転中心Oに向け角度を設けて配置する。第1固定刃41と第2固定刃42は、破砕刃3の大径破砕刃3a及び小径破砕刃3bで形成される凹凸形状に合わせ回転方向と対向するよう受け面を凹凸のくし状にしてある。大径破砕刃3a及び小径破砕刃3bの刃先は、被破砕物を掻き込んで破砕作業ができるよう前進角α度を設けて形成される。
【0014】
図6は破砕作用を示す図で、プラスチック容器Pが大径破砕刃3aにより剪断破砕される様子を表したものである。被破砕物であるポリエチレン容器Pは、図示していないが押圧板21により破砕刃回転方向へ向け押し込まれる。
押圧板21により押し込まれるプラスチック容器Pは前進角α度を設けた大径破砕刃3aにより掻き込まれ第1固定刃41と大径破砕刃3a及び小径破砕刃3bが近接する位置で剪断破砕される。このためプラスチック容器に対する押圧力は小さくてもよい。又、図7に示すようにプラスチック容器Pは剪断部が大径破砕刃3aと小径破砕刃3bの作用で凹凸形状となり、刃先を螺旋配置したことにより斜めに剪断破砕される。
【0015】
このように、破砕刃回転中心Oに向け第1固定刃41及び第2固定刃42を配置し、大径破砕刃3aの刃先の長さを長くし第1固定刃41とのラップ量Lを大きくすることにより、破砕面積が大きくなり短時間での破砕作業可能となる。第1固定刃41を底板23から破砕刃回転軸中心Oに向けせり上がり傾斜させることにより、プラスチック容器P等の被破砕物の巻き込み過ぎによる圧縮扁平作用を解消し負荷抵抗の少ない剪断破砕することができ、固定刃を水平配置する従来機よりも剪断位置を底板面より上方にすることより、収容室容量を大きくでき破砕刃ユニットBを収容室2の高さ内に収めることができる。又、第2固定刃42を破砕刃回転中心位置から対称に設けることにより、2次破砕が可能となりより破砕効率のよい一軸破砕機となる。
【0016】
図8は破砕作業の制御手段を示すフローチャートである。破砕する原料である被破砕物を、収容室2上面に設けた投入扉22を開き投入する。投入後、投入扉22を閉める。投入扉22を閉じなければ破砕機が起動しないよう、投入扉22と接触して閉じ状態を検出する投入扉閉じセンサS1が設けてある。
起動スイッチS5を押し破砕作業を開始する。まず、破砕刃3が矢印R方向に正転し、押圧板21を前進させ被破砕物を回転する破砕刃3方向へ押し込みを開始する。次に、電装ボックス6に備えた制御手段である押圧保護回路P1と破砕刃保護回路P2を始動させる。
【0017】
破砕刃保護回路P2は、駆動軸31の他方端に設けた破砕刃回転数検出板37と支持フレーム36に備えた回転数検出センサS4が破砕刃の回転数を検出する。破砕刃回転数Naが設定回転数Nより低下する場合、負荷抵抗有りの信号を破砕刃保護回路P2に送る。本実施例では20rpmに設定されている。信号を受けた破砕刃保護回路P2は正転する破砕刃3を停止させ、前進する押圧板21を停止させる。次に、押圧板21を後退させ、押圧板21後退後、破砕刃3が秒間逆転させ噛み込んだ負荷要因となる破砕物及び異物を取り除く。本実施例では5秒間逆転する。
【0018】
再び破砕刃3を正転させる。この時、負荷要因が取り除かれている場合は破砕刃回転数Naが設定回転数Nで回転していることを回転数検出センサS4が検出すると、負荷抵抗無しの信号を破砕刃保護回路P2へ送り押圧板21が前進を開始する。まだ負荷要因が取り除かれずにいる場合は破砕刃回転数Naが設定回転数N以下で回転していることを回転数検出センサS4が検出すると、負荷抵抗有りの信号を破砕刃保護回路P2へ送り再度破砕刃3を逆転させ、又、カウンタKを設け繰り返し設定回数Tを設定し、設定回数破砕刃3を逆転させ負荷要因除去動作を行なっても負荷要因が取り除かれない場合は、全停止するよう構成してある。
【0019】
押圧保護回路P1は被破砕物の押し込み抵抗を押圧駆動手段である押圧モータM2の電流値を検出する電流値検出センサを備え、設定電流値E以上の電流値Eaが検出されると押圧モータM2を逆転させ押圧板21を数秒間後退させ再び前進させる自動運転制御回路である。
【0020】
本実施例では、設定電流値4.0アンペアとし、通常破砕時は3.7アンペアで駆動している。又、押圧板21の後退時間は1秒間に設定してある。前記自動運転制御回路により押圧板21あるいは破砕刃3を正逆転させ、破砕作業動作を繰り返しながら押圧板21のガイド体21aが押圧板前進端センサS3と接すると押圧板21の前進が停止し、続いて破砕刃3の回転が停止して押圧板21が押圧板原点センサS2と接する位置まで後退停止し全停止となる自動運転制御回路である。
【0021】
【効果】
以上のように被破砕物を収容する収容室の下方に被破砕物を破砕刃方向へ押し込む押圧板の駆動手段を配置したことにより駆動手段が収容室内に備えた押圧板の往復移動範囲内に納まり、機体寸法のコンパクトな破砕機を提供することができる。
【図面の簡単な説明】
【図1】本発明を実施した破砕機の平面断面図
【図2】同破砕機の正面断面図
【図3】同破砕機の押圧板の往復駆動手段を示す平面図
【図4】同破砕機の破砕刃部の斜視図
【図5】同破砕機の破砕刃要部断面図
【図6】同破砕機の破砕作用図
【図7】同破砕機で剪断破砕されているプラスチック容器の平面図
【図8】同破砕機における破砕作業の制御手段を示すフローチャート
【符号の説明】
1 機体フレーム
2 収容室
21 押圧板
21a ガイド体
22 投入扉
23 底板
23a スリット
24 スライド体
24a スクリューナット
24b ガイドパイプ
3 破砕刃
3a 大径破砕刃
3b 小径破砕刃
31 駆動軸
32 ベアリング
33 スプロケット
34 チェーン
35 天板
36 支持フレーム
37 回転数検出板
41 第1固定刃
42 第2固定刃
5 排出スクリーン
6 電装ボックス
A 押圧ユニット
B 破砕刃ユニット
C 往復駆動手段
C1 スクリュー軸
C2 ガイド軸
C3 ベアリング
C4 スプロケット
C5 チェーン
E 設定電流値
Ea 電流値
K カウンタ
M1 駆動モータ
M2 押圧モータ
N 設定回転数
Na 破砕刃回転数
L ラップ量
O 破砕刃回転中心
R 破砕刃回転方向
S1 扉閉センサ
S2 押圧板原点センサ
S3 押圧板前進端センサ
S4 回転数検出センサ
S5 起動スイッチ
T 繰り返し設定回数
Ta 繰り返し回数
【産業上の利用分野】
本発明は、廃棄物を破砕減容処理する破砕機の押圧板の駆動手段の改良に関する。
【0002】
【従来の技術】
従来技術による破砕機の被破砕物を押圧する押圧板の駆動手段は、特開平10−109044号公報によるものが知られる。この破砕機による押圧板の駆動手段は、押圧板を往復移動されるため押圧板の背面に油圧シリンダのシリンダロッドが接続され、油圧シリンダの伸縮動作に従い、押圧板を往復移動させるものである。
【0003】
【発明が解決しようとする課題】
上記のような押圧板駆動手段では、押圧板の往復移動範囲すなわちシリンダロッドの伸縮範囲からさらに油圧シリンダ本体が飛び出してしまうため、機体の押圧方向寸法が長くなってしまい機体が大型化するという問題点と、配置スペースが大きくなってしまうという問題点がある。そこで本発明は、上記問題点を解決するものであり、機体をコンパクトにし配置スペースを少なくした破砕機を実現することである。
【0004】
【課題を解決するための手段】
破砕刃と、被破砕物を収容する収容室と、収容室内部に破砕刃へ向け被破砕物を押し込む押圧板と、この押圧板を往復移動させる往復駆動手段を備えた破砕機において、前記往復駆動手段を押圧方向と平行に配置するとともに前記押圧板の略往復移動範囲に納め、前記往復駆動手段はスクリュー軸と、このスクリュー軸と螺合する押圧板とから構成され、前記スクリュー軸を正逆転させることにより押圧板を往復移動させることを特徴とした破砕機を提供する。
【0005】
【作用】
以上のような構成にすることにより、押圧板の駆動手段が押圧板の往復移動範囲内に納まり、機体がコンパクトで省スペースで配置できる破砕機を提供することが可能となる。
【0006】
【発明の実施の形態】
図1は本発明を実施した一軸破砕機の平面断面図であり、図2は本発明を実施した一軸破砕機の正面断面図である。図3は本発明を実施した破砕機の押圧板の往復駆動手段を示す平面図であり、、図4は本発明を実施した一軸破砕機の破砕刃部の斜視図である。図5は本発明を実施した一軸破砕機の破砕刃要部断面図であり、図6は本発明を実施した一軸破砕機の破砕作用図である。図7は本発明を実施した一軸破砕機で剪断破砕されているプラスチック容器の平面図であり、図8は破砕機における破砕作業の制御手段を示すフローチャートである。
【0007】
図1、図2に示すように、1は機体フレームで、機体フレーム1の上部には、被破砕物を収容する収容室2が設けられ、この収容室2内には往復移動可能とした押圧板21が設けられ、この押圧板21を往復移動させる往復駆動手段Cとで押圧ユニットAが構成されている。押圧板21の進行方向には破砕刃ユニットBが形成され、この破砕刃ユニットB内には駆動軸31の周上に装着した破砕刃3が設けられ、駆動軸31が駆動モータM1でチェーン駆動されることにより破砕刃3が矢印R方向に回転するようになっている。破砕刃3の回転方向と対向するように第1固定刃41と第2固定刃42が破砕刃回転中心Oに向け設けられ、断面が円弧で複数の孔を設けた排出スクリーン5が破砕刃3に沿うように配置され、一定形状に破砕された破砕物のみ排出するよう構成されている。又、これら各ユニットを制御する制御回路を備えた電装ボックス6が機体フレーム内に備え制御手段を構成している。
【0008】
更に、上記各構成について詳述する。押圧ユニットAには水平方向に伸びる断面形状が短形の筒状で形成される収容室2と、収容室2の上面には被破砕物を投入する投入口が開口し投入扉22が開閉自在に設けてあり、投入扉22が閉じている時に、接するよう投入扉閉センサS1が設けてある。下面の底板23には破砕刃ユニットB方向に向け細長形状に切り欠いたスリット23aを有し、内設した押圧板21の背面に設けたガイド体21aが底板23に開口したスリット23aから下方に突設し、スリット23aに添って摺動自在とし往復駆動手段Cと連結され、収容室2内に収容された被破砕物を破砕刃ユニットBに向け押込み可能である。
【0009】
往復駆動手段Cは収納室2の下面に設けた底板23の下方外面に配置され、図3に示すように押圧方向に平行で回転自在に両端を軸支した1本のスクリュー軸C1とスクリュー軸C1の軸方向に平行で左右に2本のガイド軸C2を設け構成され、スクリュー軸C1と螺合するスクリューナット24aと、ガイド軸C2に摺動自在に挿入するガイドパイプ24bとを備えたスライド体24が底板23に開口したスリット23aから突設するガイド体21aの下端部と連結される。回転自在にしたスクリュー軸C1はベアリングC3で両端を支持され一端が突出しこの端部にはスプロケットC4が設けられる。
【0010】
機体フレーム1枠内に配置された押圧モータM2とスプロケットC4の間はチェーンC5で架設され、押圧モータM2が正逆転することによりスクリュー軸C1が正逆転しスクリューナット24aを備えたスライド体24を往復動作し、スライド体24が往復運動することにより連結するガイド体21aを背面に備えた押圧板21が往復動作し、押圧開始端には押圧板原点センサS2と押圧終了端には押圧板前進端センサS3が収容室下部にガイド体21aと接するよう備えてある。ガイド軸C2に摺動自在に挿入するガイドパイプ24bをスライド体24に備えることにより、押圧板が前後左右に傾くことがなくスムーズな往復移動が可能となる。
【0011】
破砕刃ユニットBには角形スプラインを有する駆動軸31が押圧方向に直交する向きで設けられ、その周上には複数の被嵌合部を有する破砕刃3がスプラインに嵌合し軸方向に列設されている。駆動軸31はベアリング32で両端を支持され、支持フレーム36にて回転自在に固定される。駆動軸31の一端にはスプロケット33が設けられている。機体フレーム1枠内に配置された駆動モータM1とスプロケット33の間はチェーン34で架設され、駆動軸31がチェーン駆動されることにより破砕刃3が矢印R方向に回転するようになっている。他方端には回転数検出板37が設けられ、支持フレームには回転数検出センサS4が回転数検出板37と近接するよう配置されている。
【0012】
図4に示すように、駆動軸31に列設される破砕刃3は大径破砕刃3aと小径破砕刃3bを交互に列設させ、大径破砕刃3a及び小径破砕刃3bの刃先がそれぞれ螺旋を形成するよう駆動軸31の角形スプラインの嵌合部に対し破砕刃3の被嵌合部を所定の角度異相させ配置する。この配列にすることにより、剪断破砕時の被破砕物に対する刃先の剪断作用が1ヵ所づつ異相して連続的に行なわれるため、剪断作用が分散されて低負荷状態での破砕作業が行なえる。
【0013】
図5に示すように、第1固定刃41は破砕刃ユニットBと収容室2の連結部付近で機体フレーム1に固定され、収容室2の底板23から破砕刃回転中心Oに向け、せり上がるよう角度を設け剪断位置を底板23より上方になるよう配置される。第2固定刃42は破砕刃ユニットBの上面の天板35に固定され、第1固定刃41に対し、破砕刃回転中心Oでの対称位置となり、受け面は破砕刃回転中心Oに向け角度を設けて配置する。第1固定刃41と第2固定刃42は、破砕刃3の大径破砕刃3a及び小径破砕刃3bで形成される凹凸形状に合わせ回転方向と対向するよう受け面を凹凸のくし状にしてある。大径破砕刃3a及び小径破砕刃3bの刃先は、被破砕物を掻き込んで破砕作業ができるよう前進角α度を設けて形成される。
【0014】
図6は破砕作用を示す図で、プラスチック容器Pが大径破砕刃3aにより剪断破砕される様子を表したものである。被破砕物であるポリエチレン容器Pは、図示していないが押圧板21により破砕刃回転方向へ向け押し込まれる。
押圧板21により押し込まれるプラスチック容器Pは前進角α度を設けた大径破砕刃3aにより掻き込まれ第1固定刃41と大径破砕刃3a及び小径破砕刃3bが近接する位置で剪断破砕される。このためプラスチック容器に対する押圧力は小さくてもよい。又、図7に示すようにプラスチック容器Pは剪断部が大径破砕刃3aと小径破砕刃3bの作用で凹凸形状となり、刃先を螺旋配置したことにより斜めに剪断破砕される。
【0015】
このように、破砕刃回転中心Oに向け第1固定刃41及び第2固定刃42を配置し、大径破砕刃3aの刃先の長さを長くし第1固定刃41とのラップ量Lを大きくすることにより、破砕面積が大きくなり短時間での破砕作業可能となる。第1固定刃41を底板23から破砕刃回転軸中心Oに向けせり上がり傾斜させることにより、プラスチック容器P等の被破砕物の巻き込み過ぎによる圧縮扁平作用を解消し負荷抵抗の少ない剪断破砕することができ、固定刃を水平配置する従来機よりも剪断位置を底板面より上方にすることより、収容室容量を大きくでき破砕刃ユニットBを収容室2の高さ内に収めることができる。又、第2固定刃42を破砕刃回転中心位置から対称に設けることにより、2次破砕が可能となりより破砕効率のよい一軸破砕機となる。
【0016】
図8は破砕作業の制御手段を示すフローチャートである。破砕する原料である被破砕物を、収容室2上面に設けた投入扉22を開き投入する。投入後、投入扉22を閉める。投入扉22を閉じなければ破砕機が起動しないよう、投入扉22と接触して閉じ状態を検出する投入扉閉じセンサS1が設けてある。
起動スイッチS5を押し破砕作業を開始する。まず、破砕刃3が矢印R方向に正転し、押圧板21を前進させ被破砕物を回転する破砕刃3方向へ押し込みを開始する。次に、電装ボックス6に備えた制御手段である押圧保護回路P1と破砕刃保護回路P2を始動させる。
【0017】
破砕刃保護回路P2は、駆動軸31の他方端に設けた破砕刃回転数検出板37と支持フレーム36に備えた回転数検出センサS4が破砕刃の回転数を検出する。破砕刃回転数Naが設定回転数Nより低下する場合、負荷抵抗有りの信号を破砕刃保護回路P2に送る。本実施例では20rpmに設定されている。信号を受けた破砕刃保護回路P2は正転する破砕刃3を停止させ、前進する押圧板21を停止させる。次に、押圧板21を後退させ、押圧板21後退後、破砕刃3が秒間逆転させ噛み込んだ負荷要因となる破砕物及び異物を取り除く。本実施例では5秒間逆転する。
【0018】
再び破砕刃3を正転させる。この時、負荷要因が取り除かれている場合は破砕刃回転数Naが設定回転数Nで回転していることを回転数検出センサS4が検出すると、負荷抵抗無しの信号を破砕刃保護回路P2へ送り押圧板21が前進を開始する。まだ負荷要因が取り除かれずにいる場合は破砕刃回転数Naが設定回転数N以下で回転していることを回転数検出センサS4が検出すると、負荷抵抗有りの信号を破砕刃保護回路P2へ送り再度破砕刃3を逆転させ、又、カウンタKを設け繰り返し設定回数Tを設定し、設定回数破砕刃3を逆転させ負荷要因除去動作を行なっても負荷要因が取り除かれない場合は、全停止するよう構成してある。
【0019】
押圧保護回路P1は被破砕物の押し込み抵抗を押圧駆動手段である押圧モータM2の電流値を検出する電流値検出センサを備え、設定電流値E以上の電流値Eaが検出されると押圧モータM2を逆転させ押圧板21を数秒間後退させ再び前進させる自動運転制御回路である。
【0020】
本実施例では、設定電流値4.0アンペアとし、通常破砕時は3.7アンペアで駆動している。又、押圧板21の後退時間は1秒間に設定してある。前記自動運転制御回路により押圧板21あるいは破砕刃3を正逆転させ、破砕作業動作を繰り返しながら押圧板21のガイド体21aが押圧板前進端センサS3と接すると押圧板21の前進が停止し、続いて破砕刃3の回転が停止して押圧板21が押圧板原点センサS2と接する位置まで後退停止し全停止となる自動運転制御回路である。
【0021】
【効果】
以上のように被破砕物を収容する収容室の下方に被破砕物を破砕刃方向へ押し込む押圧板の駆動手段を配置したことにより駆動手段が収容室内に備えた押圧板の往復移動範囲内に納まり、機体寸法のコンパクトな破砕機を提供することができる。
【図面の簡単な説明】
【図1】本発明を実施した破砕機の平面断面図
【図2】同破砕機の正面断面図
【図3】同破砕機の押圧板の往復駆動手段を示す平面図
【図4】同破砕機の破砕刃部の斜視図
【図5】同破砕機の破砕刃要部断面図
【図6】同破砕機の破砕作用図
【図7】同破砕機で剪断破砕されているプラスチック容器の平面図
【図8】同破砕機における破砕作業の制御手段を示すフローチャート
【符号の説明】
1 機体フレーム
2 収容室
21 押圧板
21a ガイド体
22 投入扉
23 底板
23a スリット
24 スライド体
24a スクリューナット
24b ガイドパイプ
3 破砕刃
3a 大径破砕刃
3b 小径破砕刃
31 駆動軸
32 ベアリング
33 スプロケット
34 チェーン
35 天板
36 支持フレーム
37 回転数検出板
41 第1固定刃
42 第2固定刃
5 排出スクリーン
6 電装ボックス
A 押圧ユニット
B 破砕刃ユニット
C 往復駆動手段
C1 スクリュー軸
C2 ガイド軸
C3 ベアリング
C4 スプロケット
C5 チェーン
E 設定電流値
Ea 電流値
K カウンタ
M1 駆動モータ
M2 押圧モータ
N 設定回転数
Na 破砕刃回転数
L ラップ量
O 破砕刃回転中心
R 破砕刃回転方向
S1 扉閉センサ
S2 押圧板原点センサ
S3 押圧板前進端センサ
S4 回転数検出センサ
S5 起動スイッチ
T 繰り返し設定回数
Ta 繰り返し回数
Claims (2)
- 破砕刃と、被破砕物を収容する収容室と、収容室内部に破砕刃へ向け被破砕物を押し込む押圧板と、この押圧板を往復移動させる往復駆動手段を備えた破砕機において、前記往復駆動手段を押圧方向と平行に配置するとともに前記押圧板の略往復移動範囲に納めたことを特徴とした破砕機。
- 前記往復駆動手段はスクリュー軸と、このスクリュー軸と螺合する押圧板とから構成され、前記スクリュー軸を正逆転させることにより押圧板を往復移動させることを特徴とした請求項1記載の破砕機。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002323178A JP2004122094A (ja) | 2002-09-30 | 2002-09-30 | 破砕機 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002323178A JP2004122094A (ja) | 2002-09-30 | 2002-09-30 | 破砕機 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2004122094A true JP2004122094A (ja) | 2004-04-22 |
Family
ID=32289816
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002323178A Pending JP2004122094A (ja) | 2002-09-30 | 2002-09-30 | 破砕機 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2004122094A (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007130528A (ja) * | 2005-11-08 | 2007-05-31 | Toyo Kogyo Kk | ロータリークラッシャー |
| CN110153261A (zh) * | 2019-06-10 | 2019-08-23 | 江西鼎力旋压装备有限公司 | 轮毂滚压机旋转刀轮控制结构 |
| CN110152818A (zh) * | 2019-06-10 | 2019-08-23 | 孙哲西 | 一种建筑废料的往复式粉碎装置 |
| CN111441431A (zh) * | 2020-04-02 | 2020-07-24 | 成都科锐志科技有限公司 | 一种能够快速清理的厨余机 |
| WO2023139830A1 (ja) * | 2022-01-21 | 2023-07-27 | 株式会社杉山製作所 | チップクラッシャー及び切粉の切断方法 |
-
2002
- 2002-09-30 JP JP2002323178A patent/JP2004122094A/ja active Pending
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007130528A (ja) * | 2005-11-08 | 2007-05-31 | Toyo Kogyo Kk | ロータリークラッシャー |
| CN110153261A (zh) * | 2019-06-10 | 2019-08-23 | 江西鼎力旋压装备有限公司 | 轮毂滚压机旋转刀轮控制结构 |
| CN110152818A (zh) * | 2019-06-10 | 2019-08-23 | 孙哲西 | 一种建筑废料的往复式粉碎装置 |
| CN110152818B (zh) * | 2019-06-10 | 2021-04-09 | 徽仁(宁夏)环保科技有限公司 | 一种建筑废料的往复式粉碎装置 |
| CN111441431A (zh) * | 2020-04-02 | 2020-07-24 | 成都科锐志科技有限公司 | 一种能够快速清理的厨余机 |
| WO2023139830A1 (ja) * | 2022-01-21 | 2023-07-27 | 株式会社杉山製作所 | チップクラッシャー及び切粉の切断方法 |
| JP2023106795A (ja) * | 2022-01-21 | 2023-08-02 | 株式会社杉山製作所 | チップクラッシャー及び切粉の切断方法 |
| JP7774853B2 (ja) | 2022-01-21 | 2025-11-25 | 株式会社杉山製作所 | チップクラッシャー及び切粉の切断方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6288523B2 (ja) | 金属切削屑圧縮装置 | |
| JPWO2005079991A1 (ja) | 剪断式破砕機と剪断式破砕方法 | |
| KR100789935B1 (ko) | 전단식 파쇄기 및 전단식 파쇄 방법 | |
| JP2004122094A (ja) | 破砕機 | |
| CN204892043U (zh) | 齿式单辊撕碎机 | |
| JP5671260B2 (ja) | 二軸破砕機 | |
| CN116727064B (zh) | 桥梁建筑废料再利用装置 | |
| JP3852029B2 (ja) | 一軸破砕機 | |
| JPH11151451A (ja) | ペットボトル等の処理方法および処理装置 | |
| JP2004034011A (ja) | 破砕機 | |
| JP4757177B2 (ja) | 剪断式破砕機と剪断式破砕方法 | |
| JP4574604B2 (ja) | 剪断式破砕装置 | |
| JP2005296795A (ja) | 破砕処理装置 | |
| JP4803793B2 (ja) | 一軸型破砕機 | |
| JP3195524B2 (ja) | 一軸破砕機 | |
| CN212092641U (zh) | 一种块状油脂的破碎装置 | |
| KR100642253B1 (ko) | 압축 파쇄기 | |
| EP1055459B1 (fr) | Dispsitif d'introduction forcée de pièces plastique ou de déchets de toutes dimentions dans toutes types de machines à broyer | |
| JPH04326950A (ja) | 細断屑拡散、圧縮装置付き文書細断機、およびその拡散圧縮装置 | |
| CN119114252A (zh) | 一种用于处理固体废物的粉碎机构 | |
| JPH034359Y2 (ja) | ||
| JP2002126551A (ja) | 破砕機 | |
| JP3076811B2 (ja) | ダイス装置 | |
| CN120861232B (zh) | 一种垃圾发电用垃圾处理装置 | |
| CN221733585U (zh) | 一种板材切边废料的破碎装置 |