JP2004146062A - トラックカウント装置 - Google Patents
トラックカウント装置 Download PDFInfo
- Publication number
- JP2004146062A JP2004146062A JP2004009693A JP2004009693A JP2004146062A JP 2004146062 A JP2004146062 A JP 2004146062A JP 2004009693 A JP2004009693 A JP 2004009693A JP 2004009693 A JP2004009693 A JP 2004009693A JP 2004146062 A JP2004146062 A JP 2004146062A
- Authority
- JP
- Japan
- Prior art keywords
- tracking error
- circuit
- error signal
- output signal
- offset component
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images













Landscapes
- Moving Of The Head For Recording And Reproducing By Optical Means (AREA)
- Optical Recording Or Reproduction (AREA)
Abstract
【課題】 トラックシジャンプやシークの際にトラック数を正確に検出する。
【解決手段】 光ディスクの光ビームの走査方向に対して蛇行したトラックの中心を挟んで配されるディテクタ41a、41b、41c、41dを有するフォトディテクタ41と、このフォトディテクタ41からの出力信号の差を取ることによってトラッキングエラー信号を生成するプッシュプル回路42と、プッシュプル回路42からの出力信号からオフセット成分を抽出するオフセット成分抽出回路30と、この抽出回路30からの出力信号とプッシュプル回路42らの出力信号に基づいて、光ビームが光ディスクのトラックを横切る際のトラック数をカウントするカウント回路20とを備える。
【選択図】図11
【解決手段】 光ディスクの光ビームの走査方向に対して蛇行したトラックの中心を挟んで配されるディテクタ41a、41b、41c、41dを有するフォトディテクタ41と、このフォトディテクタ41からの出力信号の差を取ることによってトラッキングエラー信号を生成するプッシュプル回路42と、プッシュプル回路42からの出力信号からオフセット成分を抽出するオフセット成分抽出回路30と、この抽出回路30からの出力信号とプッシュプル回路42らの出力信号に基づいて、光ビームが光ディスクのトラックを横切る際のトラック数をカウントするカウント回路20とを備える。
【選択図】図11
Description
本発明は、トラックカウント装置に関し、特に、トラッキングエラー検出手段を用いたトラックカウント装置に関する。
光記録媒体、例えば光ディスクを用いた光ディスク装置において、トラッキングサーボ制御に使用されるトラッキングエラー信号の検出方法の1つとしてプッシュプル法が知られている。
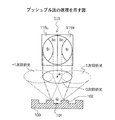
図1は、プッシュプル法の原理を説明するためのものである。光ディスク100の基板には、例えば図1に示すように、グルーブ101とランド102が予め形成されており、プッシュプル法は、例えばクルーブ101で反射回折された光を、トラックの中心に対して対称に配置された例えば2分割フォトディテクタ115で検出し、これらのディテクタ115L、115Rの出力差をトラッキングエラー信号として取り出すものである。
具体的には、上述の図1に示すように、光ディスク100からの反射光は、グルーブ101と直角方向に、主に(0次)と(±1次)の回折光となっている。そこで、2分割フォトディテクタ115のそれぞれのディテクタ115L、115Rをトラックの中心に対して対称に配置し、ディテクタ115L、115Rでそれぞれ(0次)+(+1次)、(0次)+(−1次)の光の強度、すなわち0次の回折光のみが存在する領域S0と、0次及び1次の回折光が存在する領域S1との強度の合計を検出する。そして、例えば差動増幅器によってディテクタ115L、115Rの各出力の差分を求めることにより、トラッキングエラー信号を得ることができる。
ところで、プッシュプル法では、例えば図2に示すように、トラッキングに伴う対物レンズ114の移動(所謂対物レンズの視野振り)や、光ディスクの半径方向の傾き等により、トラッキングエラー信号にオフセットが生じる。
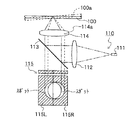
具体的には、例えば図3に示すように、所謂光ピックアップ110の半導体レーザ111から出射された光ビームは、コリメータレンズ112で平行光とされた後、ビームスプリッタ113で反射され、対物レンズ114によって光ディスク100上に集光される。光ディスク100上で反射された光ビームは、往路を逆に戻り、ビームスプリッタ113を透過した後、2分割フォトディテクタ115で受光される。そして、対物レンズ114のみを光軸と直交する方向に動かしてトラッキングを行う方式においては、対物レンズ114が114aで示す位置に動いたとすると、2分割フォトディレクタ115の中心に対して回折光のスポットがずれてしまい、トラッキングエラー信号に直流のオフセットが発生する。
また、例えば図4に示すように、光ディスク100が、100aで示すように傾いたとすると、上述と同様に、2分割フォトディレクタ115の中心に対して回折光のスポットがずれてしまい、トラッキングエラー信号にオフセットが発生する。この結果、対物レンズ114の中心がトラックの中心上に位置していても、値が0でないトラッキングエラー信号が検出され、正確なトラッキングサーボをかけることができない。
さらに、所謂トラックジャンプやシークの際に、光ビームが横切ったトラック数をトラッキングエラー信号に基づいて計数(カウント)する光ディスク装置では、上述のようにトラッキングエラー信号にオフセットが存在すると、トラック数を正しくカウントすることができない。
そこで、トラッキングエラー借号のオフセット成分を除去するために、従来のトラッキングサーボ装置では、例えば光ピックアップを構成する光学系や光ピックアップ全体を移動する等の対物レンズの視野振りが発生しないような機械的な機構を採用している。また、トラッキングエラー信号以外の情報により、例えば図5に示すように、グルーブ101をアドレス情報に基づいて所謂ウォッブルし、例えば2分割フォトディテクタの各ディテクタで検出されるウォッブル成分の振幅の差により、トラッキングエラー信号のオフセット成分をキャンセルするようになっている。
しかし、いずれの場合にも、そのためにコストが高くなるという問題があり、また、ウォッブル成分でトラッキングエラー信号のオフセット成分をキャンセルする方法では、ウォッブル成分がオントラック状態でないと正確に検出することができないため、光ビームが横切るトラック数を正確に検出することができないという問題がある。
本発明は、上述のような実情に鑑みてなされたものであり、プッシュプル法において、トラッキングに伴う対物レンズの移動や光ディスクの傾きによるトラッキングエラー信号のオフセットを軽減し、光ビームのスポットが横切るトラック数を正確に検出することができるトラックカウント装置を提供することを目的とする。
上述したような目的を達成するために提案される本発明に係るトラックカウント装置は、光記録媒体のトラックの中心を挟んで配され、光記録媒体に照射された光ビームの戻りビームを検出する少なくとも2つの検出部を有する光検出器と、この光検出器の各検出部からの出力信号の差を取ることによってトラッキングエラー信号を生成するトラッキングエラー信号生成手段と、トラッキングエラー信号生成手段からの出力信号からオフセット成分を抽出する抽出手段と、この抽出手段からの出力信号とトラッキングエラー信号生成手段からの出力信号に基づいて光記録媒体に照射された光ビームが光記録媒体のトラックを横切る際のトラック数をカウントするカウント手段とを備える。
ここで、カウント手段は、抽出手段からの出力信号と、トラッキングエラー信号生成手段からの出力信号とを減算する減算回路と、この減算回路からの出力信号に基づいて光記録媒体に照射された光ビームが光記録媒体のトラックを横切る際のトラック数をカウントするカウント回路とを備える。
また、抽出手段は、トラッキングエラー信号生成手段からのトラッキングエラー信号のピークホールドを行うピークホールド回路と、トラッキングエラー信号生成手段からのトラッキングエラー信号のボトムホールドを行うボトムホールド回路と、ピークホールド回路からの出力信号とボトムホールド回路からの出力信号に基づいて、ピークホールド回路からの出力信号とボトムホールド回路からの出力信号の平均値を求める演算手段とを備える。
本発明に係るトラックカウント装置は、プッシュプル法によって生成されたトラッキングエラー信号に基づいて、例えば光記録媒体の傾き等に起因したオフセットがトラッキングエラー信号に存在していても、トラックシジャンプやシークの際のトラック数を正確に検出することができる。
以下、本発明に係る光記録媒体のトラックカウント装置を図面を参照しながら説明する。
まず、本発明に係るトラックカウント装置に用いられるトラッキングサーボ装置を説明すると、このトラッキングサーボ装置10は、図6に示すように、オフセット成分を有するトラッキングエラー信号TE’からオフセット成分を抽出するオフセット成分抽出回路12と、上記オフセット成分抽出回路12で抽出されたオフセット成分を保持するホールド回路13と、上記トラッキングエラー信号TE’から上記ホールド回路13で保持されているオフセット成分を減算してオフセット成分が除去されたトラッキングエラー信号TEを生成する差動増幅器14と、フィートバック制御系のループを開放するスイッチ15と、上記スイッチ15を介して供給されるトラッキングエラー信号TEに基づいて所謂光ピックアップの2軸ディバイスを駆動するトラッキング制御回路16とを備える。
オフセット成分抽出回路12には、端子11を介して、所謂プッシュプル法を用いて得られたトラッキングエラー信号TE’が供給される。すなわち、例えば後述する少なくとも2つのディテクタを有するフォトディテクタの各ディテクタの出力信号の差を取ることによって得られ、例えばトラッキングに伴う対物レンズの光軸ずれ等に起因したオフセット成分を有するトラッキングエラー信号TE’が供給される。そして、オフセット成分抽出回路12は、トラッキングエラー信号TE’からそれ自体に含まれているオフセット成分を抽出する。
具体的には、オフセット成分抽出回路12は、例えば図7に示すように、トラッキングエラー信号TE’のピーク値を保持するピークホールド回路12aと、トラッキングエラー信号TE’のボトム値を保持するボトムホールド回路12bと、ピークホールド回路12aからのピーク値とボトムホ一ルド回路12bからのボトム値の平均値を求める演算回路12cとを備える。
そして、例えば所謂トラックジャンプやシークの際に、光ピックアップから出射される光ビームのスポットがトラックを横切ると、端子11を介して供給されるトラキングエラー信号TE’は、例えば図8に示すように、所謂S字曲線が周期的に連続したものとなる。ピークホールド回路12aは、トラッキングエラー信号TE’の1周期毎に、トラッキングエラー信号TE’のピーク値(最大値)を検出して保持し、保持しているピーク値を演算回路12cに供給する。また、ボトムホールド回路12bは、トラッキングエラー信号TE’の1周期毎に、トラッキングエラー信号TE’のボトム値(最小値)を検出して保持し、保持しているボトム値を演算回路12cに供給する。
演算回路12cは、ピークホールド回路12aからのピーク値とボトムホールド回路12bからのボトム値を加算した後、1/2倍することによってピーク値とボトム値の平均値を求める。すなわち、演算回路12cは、上述の図8に示すように、オフセット成分が0のときのトラッキングエラー信号のレベル(以下、基準レベルという。)に対するトラッキングエラー信号TE’のオフセット成分S1を求め、このオフセット成分S1を端子18を介してホールド回路13に供給する。
ホールド回路13は、例えばこのトラッキングサーボ装置を用いた光ディスク装置全体を制御するシステムコントローラ61から供給されるサーボ指令信号に基づいて、演算回路12cから供給されるオフセット成分S1を保持する。すなわち、システムコントローラ61は、光ディスクに対するデータの書込/読出等を行うときにはトラッキングサーボ制御をオンとするために、すなわちフィードバック系のループを閉じるために、サーボ指令信号をLレベルとし、光ピックアップを目的のトラックにシークさせる等のときには、トラッキングサーボ制御をオフとするために、サーボ指令信号をHレベルとして出力する。そして、ホールド回路13は、例えば図9に示すように、サーボ指令信号がHレベル(サーボオフ)の期間においては、オフセット成分抽出回路12から供給されるオフセット成分S1をそのままオフセット成分S2として出力すると共に、時刻t1においてサーボ指令信号がHレベル(サーボオフ)からLレベル(サーボオン)に変化すると、時刻t1におけるオフセット成分S1を保持し、この保持した時刻t1のオフセット成分S1をオフセット成分S2として、差勤増幅器14に出力する。
この差動増幅器14には、端子11を介してトラッキングエラー信号TE’が供給されており、差動増幅器14は、例えば上述の図9に示すように、トラッキングエラー信号TE’からオフセット成分S2を減算し、すなわちトラッキングエラー信号TE’からオフセット成分S2を除去し、オフセット成分S2が除去されたトラッキングエラー信号TE’を、トラッキングエラー借号S3(あるいは、トラッキングエラー信号TEという。)としてスイッチ15に供給する。
スイッチ15は、システムコントローラ61から供給されるサーボ指令信号に基づいて制御され、サーボ指令信号がLレベル(サーボオン)のとき、差動増幅器14からのオフセット成分が除去されたトラッキングエラー信号TEをトラッキング制御回路16に供給する。
トラッキング制御回路16は、例えばサーボ制御における位相補償回路、利得(ゲイン)増幅器、電力増幅器(ドライバ)等を備え、スイッチ15を介して供給されるトラッキングエラー信号TEに基づいて、例えば光ピックアップの2軸デバイスを駆動する。
かくして、トラッキングサーボがかかり、光ビームのスポットがオントラックする。そして、本発明を適用したこのトラッキングサーボ装置では、上述したように、例えばトラックジャンプが終了してトラッキングサーボがオンにされたときに、トラッキングエラー信号TE’からそれ自体のオフセット成分を抽出して保持しておき、このオフセット成分をトラッキングエラー信号TE’から除去してトラッキングサーボ制御を行うことにより、対物レンズの視野振りが発生しないようにするための機械的な機構やトラッキングエラー信号以外の情報に基づいたオフセット成分の除去回路等を設けることなく、すなわちコストをかけずに、正しくトラッキングサーボをかけることができる。また、このトラッキングサーボ装置では、オフセット成分をトラッキングエラー信号TE’の低域成分としていないことから、オフセット成分が除去されたトラッキングエラー信号TEには低域成分が含まれているので、サーボ制御における低域ゲインを低下させることなく、トラッキングサーボをかけることができる。
さらに、このトラッキングサーボ装置は、上述のように、1スポットでトラッキングサーボ制御を行うことができ、また、プッシュプル法によるトラッキングエラー信号のオフセット成分を常にキャンセルする有効な方法がない、例えば光磁気ディスク装置等において、特に有効である。
ところで、オフセット成分抽出回路12は、上述の図7に示す構成の回路に限定されるものではなく、例えば図10に示すように、低域通過フィルタ(以下、LPFという。)12dとしてもよい。この場合、LPF12dの所謂カットオフ周波数と、トラッキングエラー信号TE’に含まれているオフセット成分の周波数とが近いときには、位相ずれが発生し、正しくオフセット成分を抽出できないので、LPF12dのカットオフ周波数は、オフセット成分の周波数、サーボ制御の低域ゲイン等を考慮して最適な値に設定するものとする。
本発明に係る発明トラックカウント装置は、上述したトラッキングサーボ装置を用いて構成されるものであって、具体的には、図11に示すような構成されたトラックカウント回路20を備える。
本発明に係るトラックカウント装置を構成するトラックカウント回路20は、図11に示すように、上述したトラッキングエラー信号TE’のピーク値を保持するピークホールド回路22aと、トラッキングエラー信号TE’のボトム値を保持するボトムホールド回路22bと、ピークホールド回路22aからのピーク値とボトムホールド回路22bからのボトム値の平均値を求めて、オフセット成分として出力する演算回路22cと、トラッキングエラー信号TE’と演算回路22cからのオフセット成分を比較する比較器23と、比較器23の出力を計数するカウンタ24とを備える。
上述したように、例えばトラックジャンプ等の際に、光ピックアップから出射される光ビームのスポットがトラックを横切ると、端子21を介して供給されるトラッキングエラー信号TE’は、例えば図12に示すように、オフセット成分を含み、S字曲線が周期的に連続したものであって、1周期が横切る1トラックに対応したものであり、ピークホールド回路22aは、トラッキングエラー信号TE’の1周期毎に、トラッキングエラー信号TE’のピーク値を検出して保持し、保持しているピーク値を演算回路22cに供給する。また、ボトムホールド回路22bは、トラッキングエラー信号TE’の1周期毎に、トラッキングエラー信号TE’のボトム値を検出して保持し、保持しているボトム値を演算回路22cに供給する。すなわち、上述の図12に示すように、ピークホールド回路22aは、トラッキングエラー信号TE’の上の包絡線PEに近似した値を出力する。
演算回路22cは、ピークホールド回路22aからのピーク値とボトムホールド回路22bからのボトム値を加算した後、1/2倍することによってピーク値とボトム値の平均値を求める。すなわち、演算回路22cは、上述の図12に示すように、基準レベルに対するトラッキングエラー信号TE’にまれているオフセット成分S4を求め、このオフセット成分S4を比較器23に供給する。
この比較器23には、端子21を介してトラッキングエラー信号TE’が供給されており、比較器23は、トラッキングエラー信号TE’とオフセット成分S4を比較して、例えば上述の図9に示すように、トラッキングエラー信号TE’がオフセット成分S4より大きいときにHレベルとなる信号TCをカウンタ24に供給する。カウンタ24は、Hレベルの信号TCをカウントすることにより、トラックジャンプ等の際の光ビームのスポットが横切ったトラック数をカウントする。そして、カウンタ24は、端子25を介して、カウントしたトラック数をシステムコントローラ61に供給する。
すなわち、上述したトラッキングサーボ装置を適用したトラックカウント装置では、プッシュプル法によって生成されたトラッキングエラー信号TE’に基づいて、例えば光ディスクの傾き等に起因したオフセットがトラッキングエラー信号TE’に存在していても、トラックシジャンプやシークの際のトラック数を正確に検出することができる。
ところで、上述した図6に示す構成のトラッキングサーボ装置では、プッシュプル法によって得られるトラッキングエラー信号にオフセットが存在していても、トラッキングサーボをオンにしたときには光ビームのスポットを正しくオントラックすることができるが、その後、トラッキングに伴って対物レンズの位置が移動した場合には、ホールド回路13に保持されているオフセット成分は正しくない値となる。
そこで、本発明に係るトラックカウント装置においては、例えばアドレス情報に基づいて蛇行(所謂ウォッブル)されたグループからの回折光を用いてオフセット成分を除去する技術を用いたトラッキングサーボ装置を用いることが望ましい。
以下、このトラックカウント装置を採用した本発明に係るトラッキングサーボ装置を説明する。
本発明に係る発明トラックカウント装置に用いられるトラッキングサーボ装置は、例えば図13に示すように、少なくとも2つのディテクを有するフォトディテクタ41と、このフォトディテクタ41の各検出部の出力信号の差を取ることによってトラッキングエラー信号TE’を生成するプッシュプル回路42と、トラッキングエラー信号TE’の例えばウォッブル成分に基づいてオフセット成分を抽出するオフセット成分抽出回路30と、プッシュプル回路42からのトラッキングエラー信号からオフセット成分抽出回路30からのオフセット成分を減算して、オフセット成分が除去されたトラッキングエラー信号TEを生成する差動増幅器44と、トラッキングサーボをオンにした直後に対するトラッキングエラー信号TEを生成するトラックオン回路45と、差動増幅器44からのトラッキングエラー信号TEとトラックオン回路45からのトラッキングエラー信号TEを切り換え選択する切換スイッチ46と、フィードバック制御系のループを開放するスイッチ15と、スイッチ15を介して供給されるトラッキングエラー信号TEに基づいて光ピックアップの2紬ディバイスを駆動するトラッキング制御回路16と、切換スイッチ46等の切換を制御するタイミング回路50と、上述したトラックカウント回路20とを備える。
なお、上述した図6、図11に示す回路と同じ回路については、同じ符号を付けて説明を省略する。
まず、タイミング回路50について説明する。
このタイミング回路50は、例えば上述の図13に示すように、上記システムコントローラ61からのサーボ指令信号のHレベルを所定時間延ばすためのリトリガブルモノマルチバイブレータ53等を備える。そして、このタイミング回路50は、例えば図15に示すように、システムコントローラ61から供給されるサーボ指令信号あるいはブレーキパルスの立ち下がりから所定時間経過した後に立ち下がる切換信号を生成する。
具体的には、AND回路51は、システムコントローラ61からのトラックジャンプ直後の2軸ディバイスを整定させるためのブレーキパルスと、切換信号との論理積を求め、トラッキングサーボ状態にあるときのブレーキパルスをマスクする。OR回路52は、システムコントローラ61からのサーボ指令信号と、AND回路51の出力との論理和を求め、サーボ指令信号及びブレーキパルスの立ち下がりによってリトリガブルモノマルチバイブレータ53を起動する。
リトリカブルモノマルチバイブレータ53は、例えばその時定数が5msであり、OR回路52の出力信号の立ち下がりで起動すると共に、最後の立ち下がりを基準として5ms間Hレベルとなるパルス信号を出力する。すなわち、リトリガブルモノマルチバイブレータ53は、例えば上述の図15に示すように、時刻t1におけるサーボ指令信号の立ち下がりと、ブレーキパルスの立ち下がりとで起動して、時刻t1から、ブレーキパルスの最後の立ち下がりから5ms経過した時刻までの間Hレベルの信号を出力する。
OR回路54は、システムコントローラ61からのサーボ指令信号と、リトリガブルモノマルチバイブレータ53の出力信号の論理和を求めることにより、例えば上述の図15に示すように、サーボ指令借号の立ち上がりで立ち上がり、リトリガブルモノマルチバイブレータ53の立ち下がりで立ち下がる切換信号を出力する。すなわち、この切換信号は、サーボ指令信号の立ち上がり(トラッキングサーボのオフ)に同期してHレベルとなり、サーボ指令信号の立ち下がり(トラッキングサーボオン)から所定時間遅れLレベルとなる。
このタイミング回路50は、サーボ指令信号によってトラックオン回路45及びスイッチ15を制御すると共に、切換信号によって切換スイッチ43、46を制御する。具体的には、切換スイッチ43は、切換信号がLレベルのとき、オフセット成分抽出回路30の出力信号を選択して出力すると共に、切換信号がHレベルのとき、Lレベルを出力する。すなわち、切換スイッチ43は、例えば図15に示すように、トラッキングサーボがオン状態(サーボ指令信号がLレベル)のときは、オフセット成分抽出回路30の出力信号を選択して出力し、トラッキングサーボがオフ状態(サーボ指令信号がHレベル)にされた後、切換信号がHレベルの間Lレベルを出力する。
切換スイッチ46は、例えば図15に示すように、トラッキングサーボがオン状態(サーボ指令信号がLレベル)のときは、差動増幅器44の出力信号を選択して出力し、トラッキングサーボがオフ状態(サーボ指令信号がHレベル)にされた後、切換信号がHレベルの間はトラックオン回路45の出力信号を選択して出力する。
また、スイッチ15は、例えば図5に示すように、トラッキングサーボがオン状態(サーボ指令信号がLレベル)のときに、フィードバック系のループを閉じ、トラッキングサーボがオフ状態(サーボ指令信号がHレベル)のときに、フィードバック系のループを開放する。
次に、この本発明に係るトラッキングサーボ装置全体の動作について説明する。
このトラッキングサーボ装置を採用した光ディスク装置で使用される光ディスクは、背景技術において図5を用いて説明したように、例えばアドレス情報やクロック情報に基づいて、光ビームの走査方向に対して蛇行(ウォッブル)されたトラックを有し、そのウォッブルの周波数は、トラッキングサーボの周波数帯域に比して十分に高いものとなっている。
そして、フォトディテクタ41は、例えば上述の図13に示すように、4つのディテクタ41a、41b、41c、41dを有し、外側のディテクタ41a、41dは同じ面積を有し、内側のディテクタ41b、41cは同じ面積を有する。また、外側のディテクタ41a、41dの方が内側のディテクタ41b、41cよりも大きくなっており、ディテクタ41a、41bとディテクタ41c、41dは、トラックの中心を挟んて対称に配設されている。
プッシュプル回路42は、ディテクタ41a、41b、41c、41dの各出力信号の差を取ることによってオフセット成分を含んたトラッキングエラー信号TE’を生成する。具体的には、プッシュプル回路42は、例えば図14に示すように、ディテクタ41a、41bの各出力信号を加算する増幅器42aと、ディテクタ41c、41dの各出力信号を加算する増幅器42bと、増幅器42a、42bの各出力信号の差分を求める差動増幅器42cとを備える。
そして、増幅器42aは、端子31aを介して供給されるディテクタ41aの出力信号と、端子31bを介して供給されるディテクタ41bの出力信号とを加算して、差動増幅器42cに供給する。一方、増幅器42bは、端子31cを介して供給されるディテクタ41cの出力信号と、端子31dを介して供給されるディテクタ41dの出力信号とを加算して、差動増幅器42cに供給する。
差動増幅器42cは、増幅器42bの出力信号から増幅器42aの出力信号を減算して、その出力信号を差動増幅器44に供給する。すなわち、ディテクタ41a、41b、41c、41dの各出カレベルをそれぞれA、B、C、Dとすると、プッシュプル回路42は、プッシュプル法により、下記式1で表されるトラッキングエラー信号TE’を算出して、差動増幅器44に供給する。
TE’=(C+D)−(A+B) ・・・式1
なお、増幅器42a、42bを削除して、ディテクタ41a、42bを削除して、ディテクタ41a、41dの各出力信号を、直接差動増幅器42cに供給するようにしてもよい。この場合、トラッキングエラー信号TE’は、下記式2で表される。
なお、増幅器42a、42bを削除して、ディテクタ41a、42bを削除して、ディテクタ41a、41dの各出力信号を、直接差動増幅器42cに供給するようにしてもよい。この場合、トラッキングエラー信号TE’は、下記式2で表される。
TE’=D−A ・・・式2
一方、オフセット成分抽出回路30は、上述の図14に示すように、上記ディテクタ41a、41dの各出力信号をそれぞれ濾波する帯域通過フィルタ(以下、BPFという。)32a、32bと、上記BPF32a、32bの各出力信号をそれぞれ全波整流する整流回路33a、33bと、上記整流回路33a、33の各出力信号それぞれ濾波する低域通過フィルタ(以下、LPFという。)34a、34bと、上記LPF34a、34bの各出力信号の差分を求める差動増幅器35と、上記差動増幅器35の出力信号をK倍する増幅器36とを備える。
一方、オフセット成分抽出回路30は、上述の図14に示すように、上記ディテクタ41a、41dの各出力信号をそれぞれ濾波する帯域通過フィルタ(以下、BPFという。)32a、32bと、上記BPF32a、32bの各出力信号をそれぞれ全波整流する整流回路33a、33bと、上記整流回路33a、33の各出力信号それぞれ濾波する低域通過フィルタ(以下、LPFという。)34a、34bと、上記LPF34a、34bの各出力信号の差分を求める差動増幅器35と、上記差動増幅器35の出力信号をK倍する増幅器36とを備える。
そして、BPF32a、32bは、ウォッブル成分に対応した例えば19kHz〜35kHzの通過帯域を有し、BPF32aは、端子31aを介して供給されるディテクタ41aの出力信号を濾波してウォッブル成分を抽出し、抽出したウォッブル成分を整流回路33aに供給する。また、BPF32bは、端子31dを介して供給されるディテクタ41dの出力信号を濾波してウォッブル成分を抽出し、抽出したウォッブル成分を整流回路33bに供給する。
整流回路33a、33bは、それぞれBPF32a、32bからの各ウォッブル成分を全波整流することにより、ディテクタ41a、41bでそれぞれ検出されるウォッブル成分のレベルを示す各信号を生成して、LPF34a、34bに供給する。
LPF34a、34bは、例えばカットオフ周波数が190kHzの低域通過フィルタからなり、整流回路33a、33bからの各ウォッブル成分の高周波成分を除去して、差動増幅器35に供給する。すなわち、トラッキングサーボがかかった状態におけるディテク41a、41dでそれぞれ検出されるウォッブル成分の各レベルをAw、Dwとすると、差動増幅器35は、(Dw−Aw)で表されるオフセット成分を算出して、増幅器36に供給する。
増幅器36は、差動増幅器35から供給されるオフセット成分をK倍し、このK倍したオフセット成分を、切換信号がLレベルのとき、トラッキングサーボが開始した後の所定時間経過した時点で増幅器36の出力を選択する切換スイッチ43を介して差動増幅器44に供給する。差動増幅器44は、プッシュプル回路42から供給されるラッキングエラー信号TE’から、増幅器36から供給されるK倍されたオフセット成分を減算して、下記式3又は式4で表されるオフセット成分が除去されたトラッキングエラー信号TEを求め、このトラッキングエラー信号TEを切換スイッチ46に供給する。
TE=(C+D)−(A+B)−K(Dw−Aw) ・・・式3
TE=(D−A)−K(Dw―Aw) ・・・式4
一方、差動増幅器44は、切換信号がHレベルのときは、プッシュプル回路42からのオフセット成分が含まれるトラッキングエラー信号TE’をトラックオン回路45に供給する。なお、増幅器36のゲインKは、トラッキングエラー信号TE’からオフセット成分を最適に除去できる値とされる。また、このウォッブル成分を用いてトラッキングエラー信号からオフセット成分を除去する技術は、公知の技術である。
TE=(D−A)−K(Dw―Aw) ・・・式4
一方、差動増幅器44は、切換信号がHレベルのときは、プッシュプル回路42からのオフセット成分が含まれるトラッキングエラー信号TE’をトラックオン回路45に供給する。なお、増幅器36のゲインKは、トラッキングエラー信号TE’からオフセット成分を最適に除去できる値とされる。また、このウォッブル成分を用いてトラッキングエラー信号からオフセット成分を除去する技術は、公知の技術である。
そして、トラックカウント回路20は、上述したように、トラックジャンプやシーク時において、すなわち例えば上述の図15に示すように、サーボ指令信号がHレベルのとき、光ビームのスポットが横切ったトラック数を正確にカウントし、トラック数をシステムコントローラ61に供給する。
トラックオン回路45は、上述の図6に示すトラッキングサーボ装置のオフセット成分抽出回路12乃至差動増幅器14を備え、上述したように、トラッキングサーボがオンとされたとき、すなわち例えば上述の図15に示すように、サーボ指令信号がHレベルからLレベルに変化したときのオフセット成分が除去されたトラッキングエラー信号TEを切換スイッチ46に供給する。
切換スイッチ46は、上述したように、トラッキングサーボがオン状態のときは、差動増幅器44からのオフセット成分が除去されたトラッキングエラー信号TEを選択して、スイッチ15に供給し、トラッキングサーボがオフ状態にされた後、切換信号がHレベルの間は、トラックオン回路45からのオフセット成分が除去されたトラッキングエラー信号TEを選択して、スイッチ15に供給する。
スイッチ15は、上述したように、トラッキングサーボかオン状態のときに、フィードバック系のループを閉じ、トラッキングサーボがオフ状態のときに、フィードバック系のループを開放する。
トラッキング制御回路16は、上述したように、スイッチ15を介して供給されるトラッキングエラー信号TEに基づいて、例えば光ピックアップの2軸デバイスを駆動する。すなわち、トラッキング制御回路16は、サーボ指令信号がHレベルからLレベルに変化した後、所定時間は、トラックオン回路45からのオフセット成分が除去されたトラッキングエラー信号TEを用いて、トラッキングサーボ制御を行い、所定時間経過した後は、差動増幅器44からのオフセット成分が除去されたトラッキングエラー信号TEを用いてトラッキングサーボ制御を行う。
ところで、オフセット成分抽出回路30は、オントラック状態でないとウォッブル成分を正確に検出すことができず、トラックジャンプ中にはオフセット成分を抽出することができない、また、上述したようにBPF32a、32b及びLPF34a、34bを備えているので、トラッキングサーボがオンにされた後オフセット成分を正しく抽出するまでに、すなわち正常に動作すまでに時間がかかる。しかし、本発明を適用したトラッキングサーボ装置では、上述のように、サーボ指令信号がHレベルからLレベルに変化した後、所定時間は、トラックオン回路45からのオフセット成分が除去されたトラッキングエラー信号TEを用いて、トラッキングサーボ制御を行い、所定時間経過した後は、差動増幅器44からのオフセット成分が除去されたトラッキングエラー信号TEを用いてトラッキングサーボ制御を行うことにより、上述の図6を用いて説明したトラッキングサーボ装置10の効果に加えて、光ビームのスポットが正しくオントラックした後に、トラッキングに伴って対物レンズの位置が移動しても、正しくトラッキングサーボ制御を行うことができる。また、この場合にも、1スポットでトラッキングサーボ制御を行うことができ、プッシュプル法によるトラッキングエラー信号のオフセット成分を常にキャンセルする有効な方法がない、例えば光磁気ディスク装置等において特に有効である。
16 トラッキング制御回路、 20 トラックカウント回路、 30 オフセット成分抽出回路、 41 フォトディテクタ、 42 プッシュプル回路、 44 差動増幅器、 45 トラックオン回路、 46 切換スイッチ46、 50 タイミング回路、 61 システムコントローラ
Claims (3)
- 光記録媒体のトラックの中心を挟んで配され、光記録媒体に照射された光ビームの戻りビームを検出する少なくとも2つの検出部を有する光検出器と、
上記光検出器の各検出部からの出力信号の差を取ることによってトラッキングエラー信号を生成するトラッキングエラー信号生成手段と、
上記トラッキングエラー信号生成手段からの出力信号からオフセット成分を抽出する抽出手段と、
上記抽出手段からの出力信号と上記トラッキングエラー信号生成手段からの出力信号に基づいて光記録媒体に照射された光ビームが光記録媒体のトラックを横切る際のトラック数をカウントするカウント手段と
を備えることを特徴とする光記録媒体のトラックカウント装置。 - 上記カウント手段は、上記抽出手段からの出力信号と、上記トラッキングエラー信号生成手段からの出力信号とを減算する減算回路と、上記減算回路からの出力信号に基づいて光記録媒体に照射された光ビームが光記録媒体のトラックを横切る際のトラック数をカウントするカウント回路とを備えることを特徴とする請求項1記載の光記録媒体のトラックカウント装置。
- 上記抽出手段は、上記トラッキングエラー信号生成手段からのトラッキングエラー信号のピークホールドを行うピークホールド回路と、上記トラッキングエラー信号生成手段からのトラッキングエラー信号のボトムホールドを行うボトムホールド回路と、上記ピークホールド回路からの出力信号と上記ボトムホールド回路からの出力信号に基づいて、上記ピークホールド回路からの出力信号と上記ボトムホールド回路からの出力信号の平均値を求める演算手段とを備えることを特徴とする請求項1記載の光記録媒体のトラックカウント装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004009693A JP2004146062A (ja) | 1994-05-17 | 2004-01-16 | トラックカウント装置 |
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP12693794 | 1994-05-17 | ||
| JP12693894 | 1994-05-17 | ||
| JP16638194 | 1994-06-24 | ||
| JP2004009693A JP2004146062A (ja) | 1994-05-17 | 2004-01-16 | トラックカウント装置 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP7-529520A Division JPWO1995031806A1 (ja) | 1994-05-17 | 1995-05-17 | トラッキングサーボ装置及びトラックカウント装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2004146062A true JP2004146062A (ja) | 2004-05-20 |
Family
ID=32475581
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004009693A Pending JP2004146062A (ja) | 1994-05-17 | 2004-01-16 | トラックカウント装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2004146062A (ja) |
-
2004
- 2004-01-16 JP JP2004009693A patent/JP2004146062A/ja active Pending
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR100365610B1 (ko) | 트래킹서보장치및트랙카운트장치 | |
| JP3550836B2 (ja) | 光学装置におけるトラッキングサーボ装置及びトラッキングサーボ方法 | |
| JPH06162542A (ja) | 光ディスク装置 | |
| JP3458502B2 (ja) | 光ディスク装置 | |
| KR20040025636A (ko) | 트랙킹 제어 장치 및 트랙킹 제어 방법 | |
| US6847599B2 (en) | Disc drive apparatus | |
| KR101053375B1 (ko) | 스큐 검출 방법 및 광 픽업과 광 디스크 장치 | |
| JP2004146062A (ja) | トラックカウント装置 | |
| JP3786115B2 (ja) | トラッキングサーボ装置 | |
| JP2633196B2 (ja) | 光情報処理装置 | |
| JPWO1995031806A1 (ja) | トラッキングサーボ装置及びトラックカウント装置 | |
| JP3507956B2 (ja) | 光ディスク | |
| JP4093141B2 (ja) | スキュー検出方法及びスキュー検出装置、並びに光ピックアップ及び光ディスク装置 | |
| JP2633195B2 (ja) | 光情報処理装置 | |
| JP2633197B2 (ja) | 光情報処理装置 | |
| JPH1050011A (ja) | ディスク再生装置 | |
| JPH05197988A (ja) | 光ディスク装置 | |
| JPH11120567A (ja) | 情報記録再生装置および方法 | |
| JPH02216624A (ja) | 情報処理装置 | |
| JP2005011518A (ja) | フォーカス位置調整方法及び記録再生装置 | |
| JP2004158180A (ja) | ディスク再生装置 | |
| JPH08249684A (ja) | トラッキング制御装置 | |
| JPH1153739A (ja) | フォーカスサーボ装置および光学式記録再生装置 | |
| JPH08235598A (ja) | 光ディスク装置及び光ディスク用のジャンプトラック計数回路 | |
| JPH06139575A (ja) | 光ディスク装置および光ディスク |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Effective date: 20040213 Free format text: JAPANESE INTERMEDIATE CODE: A621 |
|
| A131 | Notification of reasons for refusal |
Effective date: 20040727 Free format text: JAPANESE INTERMEDIATE CODE: A131 |
|
| A02 | Decision of refusal |
Effective date: 20041124 Free format text: JAPANESE INTERMEDIATE CODE: A02 |