JP2004165276A - 吸着装置および搬送装置 - Google Patents
吸着装置および搬送装置 Download PDFInfo
- Publication number
- JP2004165276A JP2004165276A JP2002326991A JP2002326991A JP2004165276A JP 2004165276 A JP2004165276 A JP 2004165276A JP 2002326991 A JP2002326991 A JP 2002326991A JP 2002326991 A JP2002326991 A JP 2002326991A JP 2004165276 A JP2004165276 A JP 2004165276A
- Authority
- JP
- Japan
- Prior art keywords
- wafer
- suction
- pad
- transfer arm
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






Landscapes
- Manipulator (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
Abstract
【課題】本発明は、ウェハ等の被吸着部材を吸着する吸着装置およびこの吸着装置を用いた搬送装置に関し、変形した被吸着部材を確実に吸着することを目的とする。
【解決手段】本発明の吸着装置は、本体部に形成され、吸引穴を有する吸着部と、吸着部に固定され被吸着部材に当接される平板状のパッドとを備え、パッドは、吸引穴に通じる穴部を有し、かつ、外周部に弾性変形部が形成されていることを特徴とする。また、本発明の搬送装置は、複数枚のウェハが収容されるカセット部内に移動可能であり、ウェハを吸着するための吸着部を有する搬送アームと、搬送アームの吸着部に固定されウェハに当接される平板状のパッドと、搬送アームを移動させウェハのカセット部からの搬出またはカセット部への搬入をする駆動手段とを備え、吸着部は吸引穴を有し、パッドは、吸引穴に通じる穴部を有し、かつ、外周部に弾性変形部が形成されていることを特徴とする。
【選択図】 図4
【解決手段】本発明の吸着装置は、本体部に形成され、吸引穴を有する吸着部と、吸着部に固定され被吸着部材に当接される平板状のパッドとを備え、パッドは、吸引穴に通じる穴部を有し、かつ、外周部に弾性変形部が形成されていることを特徴とする。また、本発明の搬送装置は、複数枚のウェハが収容されるカセット部内に移動可能であり、ウェハを吸着するための吸着部を有する搬送アームと、搬送アームの吸着部に固定されウェハに当接される平板状のパッドと、搬送アームを移動させウェハのカセット部からの搬出またはカセット部への搬入をする駆動手段とを備え、吸着部は吸引穴を有し、パッドは、吸引穴に通じる穴部を有し、かつ、外周部に弾性変形部が形成されていることを特徴とする。
【選択図】 図4
Description
【0001】
【発明の属する技術分野】
本発明は、ウェハ等の被吸着部材を吸着する吸着装置およびこの吸着装置を用いた搬送装置に関する。
【0002】
【従来の技術】
従来、例えば、ウェハの外観検査に用いられるウェハ外観検査装置では、目視によるマクロ検査、顕微鏡によるミクロ検査等のために、ウェハを吸着装置で吸着して搬送することが行われている。
そして、従来、ウェハを吸着する吸着装置は、搬送用のアーム部に、例えば、3カ所の吸着部を形成し、吸着部に配置されるパッドに、ウェハを真空吸着するように構成されている。
【0003】
このような吸着装置では、ウェハを3カ所で吸着するため、ウェハを安定して確実に支持することができる。
なお、従来、搬送アームによりウェハを吸着して搬送する搬送装置が知られている(例えば、特許文献1参照)。
【特許文献1】
特開平11−124231号公報
【0004】
【発明が解決しようとする課題】
しかしながら、このような従来の吸着装置では、ウェハを複数カ所で吸着しているため、ウェハが変形しているとウェハを安定して支持することが困難になるという問題があった。
【0005】
すなわち、近年、ウェハの肉厚が薄くなる傾向にあり、薄肉のウェハでは、自重やパターン焼き付けによる変形が生じやすく、かつ、その変形は、お椀型、円筒型、あるいは、これに捩れが加わったりしており、非常に多様である。
そして、このようにウェハが変形していると、ウェハに全てのパッドを当接させることができなくなり、一部のパッドとウェハとの間に間隙が生じ、ウェハを安定して吸着することが困難になる。
【0006】
本発明は、かかる従来の問題を解決したもので、変形した被吸着部材を確実に吸着することができる吸着装置および搬送装置を提供することを目的とする。
【0007】
【課題を解決するための手段】
請求項1の吸着装置は、本体部と、前記本体部に形成され、吸引穴を有する吸着部と、前記吸着部に固定され被吸着部材に当接される平板状のパッドとを備え、前記パッドは、前記吸引穴に通じる穴部を有し、かつ、外周部に弾性変形部が形成されていることを特徴とする。
【0008】
請求項2の吸着装置は、請求項1記載の吸着装置において、前記パッドの前記弾性変形部と前記本体部との間に、間隙が形成されていることを特徴とする。
請求項3の搬送装置は、複数枚のウェハが収容されるカセット部内に移動可能であり、前記ウェハを吸着するための吸着部を有する搬送アームと、前記搬送アームの前記吸着部に固定され前記ウェハに当接される平板状のパッドと、前記搬送アームを移動させ前記ウェハの前記カセット部からの搬出またはカセット部への搬入をする駆動手段とを備え、前記吸着部は吸引穴を有し、前記パッドは、前記吸引穴に通じる穴部を有し、かつ、外周部に弾性変形部が形成されていることを特徴とする。
【0009】
【発明の実施の形態】
以下、本発明の実施形態を図面を用いて詳細に説明する。
図1および図2は、本発明が適用されるウェハ外観検査装置を示している。
このウェハ外観検査装置は、カセット載置部11、マクロ検査部13、ミクロ検査部15を有している。
【0010】
カセット載置部11には、図2に示すように、複数のウェハ17が格納されるウェハカセット19が載置される。
マクロ検査部13では、ウェハ17が目視で検査される。
ミクロ検査部15では、ウェハ17が顕微鏡21を用いて検査される。
マクロ検査部13には、吸着装置である第1の搬送アーム23、ウェハ保持アーム25、第2の搬送アーム27が配置されている。
【0011】
第1の搬送アーム23は、ウェハカセット19とマクロ検査部13との間のウェハ17の受け渡しを行う。
ウェハ保持アーム25は、マクロ検査部13において、例えば、ウェハ17の裏面を検査する時に使用される。
【0012】
第2の搬送アーム27は、マクロ検査部13とミクロ検査部15との間のウェハ17の受け渡しを行う。
第1の搬送アーム23、ウェハ保持アーム25および第2の搬送アーム27には、それぞれ3カ所に吸着手段29が配置されている。
上述したウェハ外観検査装置では、第1の搬送アーム23がウェハカセット19内に挿入されることにより、ウェハカセット19内に収容されているウェハ17が、第1の搬送アーム23により吸着保持され、マクロ検査部13に搬送される。
【0013】
マクロ検査部13において、操作者により、マクロ検査を行うための指示がなされると、図示しない駆動手段により、ウェハ保持アーム25が上昇され、吸着を解除された第1の搬送アーム23上のウェハ17が、ウェハ保持アーム25上に載置されウェハ保持アーム25に吸着される。
ウェハ17を吸着したウェハ保持アーム25は、所定の高さで上昇を停止され、操作者の指示に基づいて、図示しない駆動手段により、任意の方向に回転され、マクロ検査が行われる。
【0014】
マクロ検査の終了の指示が、操作者によってなされると、ウェハ保持アーム25は、ウェハ17のパターン面を上にして、ウェハ17を水平状態にして、下降を開始する。
ウェハ保持アーム25が所定の高さとなった時点で、ウェハ保持アーム25は、ウェハ17の吸着を解除して下降を停止する。
【0015】
この後、操作者により、ミクロ検査を行うための指示がなされると、第2の搬送アーム27が、ウェハ保持アーム25より下の位置から上昇し、吸着を解除されたウェハ保持アーム25上のウェハ17が、第2の搬送アーム27上に載置され、第2の搬送アーム27に吸着される。
ウェハ17を吸着した第2の搬送アーム27は、所定の高さで上昇を停止され、図示しない駆動手段により、図1の矢符方向に移動される。
【0016】
そして、ウェハ17の吸着を解除した後、ミクロ検査部15のXYステージ31にウェハ17が受け渡され、顕微鏡21を用いて、ウェハ17のミクロ検査が行われる。
ミクロ検査の終了の指示が操作者によってなされると、第2の搬送アーム27は、ミクロ検査部15のXYステージ31の位置より低い位置から上昇し、XYステージ31上のウェハ17を吸着する。
【0017】
ウェハ17を吸着した第2の搬送アーム27は、図1の矢符と逆の方向に移動した後、所定位置まで下降し、ウェハ17の吸着を解除する。
この時、第2の搬送アーム27より低い位置にある第1の搬送アーム23は、上昇を開始し、第2の搬送アーム27上のウェハ17を吸着して、ウェハカセット19に、検査されたウェハ17を搬送する。
【0018】
図3は、上述した第1の搬送アーム23の詳細を示すもので、図3(a)は第1の搬送アーム23の上面図、図3(b)は側面図である。
第1の搬送アーム23の本体部であるアーム部33には、その3カ所に吸着手段29が配置されている。
3カ所の吸着手段29は、吸着されるウェハ17の中心となる位置Oから、所定の角度を置いて、ほぼ同心状に配置されている。
【0019】
アーム部33の吸着手段29が配置された面と反対側の面には、真空引き用のチューブ35が接続されている。
図4は、吸着手段29の詳細を示すもので、この吸着手段29は、アーム部33に形成される吸着部37と、吸着部37に配置されるパッド39とを有している。
【0020】
吸着部37には、円形状の吸引穴33aが形成されている。
この吸引穴33aは、アーム部33に形成される断面矩形状の連通穴33bを介して、チューブ35に連通されている。
アーム部33における吸引穴33aの周縁には、円環状のスペーサ41が接着等により固定されている。
【0021】
このスペーサ41は、例えば、0.1mm程度の肉厚を有しており、金属,接着剤,両面テープ等により形成されている。
なお、このスペーサ41は、アーム部33に直接突出部を形成し、アーム部33と一体に形成してもよく、あるいは、パッド39と一体成形でもよい。
スペーサ41には、円形状のパッド39が接着等により固定されている。
【0022】
パッド39の中央には、アーム部33の吸引穴33aと同一径の吸引穴39aが形成され、吸引穴39aの周縁が、スペーサ41に固定されている。
なお、パッド39の吸引穴39aは、アーム部33の吸引穴33aと同一径でなくてもよい。吸引穴39aの径は、吸引穴33aの径より小さくてもよい。さらに、パッド39の吸引穴39aとしては、小さい径の穴を複数設けてもよい。
【0023】
パッド39は、平板状をしており、スペーサ41の外側が弾性変形部39bとされている。
パッド39は、例えば、0.02mm〜0.05mm程度の薄肉をしており、弾性材料により形成されている。
弾性材料には、例えば、樹脂系,ゴム系,金属系等の材料を使用することができる。
【0024】
樹脂系の弾性材料としては、ポリミド樹脂,アセタール樹脂,ポリエーテルエーテルケトン等が好適する。
また、ゴム系の弾性材料としては、フッ素ゴムが、金属系の弾性材料としては、ステンレススティール,アルミ合金等が好適する。
そして、パッド39の弾性変形部39bとアーム部33との間には、スペーサ41の肉厚に対応する寸法の間隙Wが形成されている。
【0025】
なお、この実施形態では、ウェハ保持アーム25および第2の搬送アーム27に形成される吸着手段29も第1の搬送アーム23に形成される吸着手段29と同様に形成されている。
図5は、変形したウェハ17を、第1の搬送アーム23の吸着手段29により吸着する時の状態を示している。
【0026】
このウェハ17は、円盤状をしており、例えば、外径を200mm、肉厚を250μmとされている。
従って、一般の半導体製造関連で規定されるウェハの標準的な肉厚に対し約1/3から1/4になっており、それに比例して重量も軽くなっている。
また、このウェハ17は、肉厚が薄いため、例えば、前加工の研磨加工により、比較的大きな変形が生じている。
【0027】
この変形は、例えば、鞍状をしており、平面に対する最大変形量が、例えば、1mm程度とされている。
図5において、アーム部33に形成される連通穴33bには、チューブ35が連通されている。
チューブ35は、真空制御弁43を介して、真空源45に接続されている。
【0028】
真空制御弁43は、2位置切替電磁弁からなり、吸着部37への空気供給を、真空側および大気側に切り替える。
これにより、吸着部37で、ウェハ17の吸着と吸着の解除との切り替えが行われる。
図5では、ウェハ17の変形に起因して、吸着手段29にウェハ17を単に載置した状態では、ウェハ17の一部のみが、吸着手段29のパッド39の外周の片側にのみ当接され、パッド39の外周の他側とウェハ17との間に間隙Lが形成されている。
【0029】
この状態で、真空制御弁43を、真空側に切り替えると、吸着部37が真空引きされ、パッド39とウェハ17との間の空間部47の圧力が低下し、パッド39のウェハ17側の面39c(以下上面という)と反対側の面39d(以下下面という)との間に圧力差が生じる。
この実施形態では、図4に示したように、パッド39の弾性変形部39bと第1の搬送アーム23のアーム部33との間に、スペーサ41により間隙Wが形成されているため、この間隙Wからパッド39の下面39d側に大気が確実に流入しており、パッド39の下面39d側の圧力は大気圧となっている。
【0030】
そして、パッド39の上面39c側に作用する圧力が大気圧より小さくなり、下面39d側には、大気圧が作用するため、パッド39の弾性変形部39bは、その圧力差により、ウェハ17側に向けて図に破線で示すように弾性変形する。パッド39の弾性変形部39bが、このようにしてウェハ17側に弾性変形すると、弾性変形部39bとウェハ17との間隙がより小さくなり、パッド39とウェハ17との間の空間部47に流入する大気が減少し、空間部47の圧力がより低下する。
【0031】
これにより、パッド39の上面39c側と下面39d側との圧力差がより増大し、図に二点鎖線で示すように弾性変形部39bが、ウェハ17に密着され、ウェハ17が吸着部37に確実に吸着される。
一方、この吸着状態で、真空制御弁43を、真空側から大気側に切り替えると、吸着部37に大気が流入し、パッド39とウェハ17との間の空間部47の圧力が大気圧となり、パッド39の上面39cと下面39dとの圧力が同じになる。
【0032】
そして、パッド39の弾性変形部39bの弾性により、弾性変形部39bが図の実線の位置に戻り、ウェハ17の吸着部37への吸着が解除される。
上述した第1の搬送アーム23(請求項1および請求項2の吸着装置の実施形態に対応する)では、平板状のパッド39の弾性変形部39bが、パッド39のウェハ17側の面39cと反対側の面39dとの間の圧力差により、ウェハ17側に変形して密着するため、変形したウェハ17を確実に吸着することができる。
【0033】
そして、ウェハ17を複数カ所で吸着する場合に、ウェハ17が変形していても、ウェハ17に全てのパッド39を密着させることが可能になり、ウェハ17を安定して支持することができる。
また、パッド39の弾性変形部39bと第1の搬送アーム23のアーム部33との間に、スペーサ41により、間隙Wを形成したので、間隙Wからパッド39の下面39d側に大気が確実に流入し、これによりパッド39の弾性変形部39bをウェハ17側に確実に変形させることができる。
【0034】
そして、上述したウェハ外観検査装置(請求項3の搬送装置の実施形態に対応する)では、第1の搬送アーム23の吸着部37に配置される平板状のパッド39の弾性変形部39bが、パッド39のウェハ17側の面39cと反対側の面39dとの間の圧力差により、ウェハ17側に変形して密着するため、変形したウェハ17を確実に吸着することができる。
【0035】
また、パッド39が肉厚の薄い平板状をしているため、パッド39の厚みにアーム部33の厚みを加えた、第1の搬送アーム23の厚みを小さくすることができる。
そして、第1の搬送アーム23の厚みを小さくすることが可能になるため、ウェハ17の収納間隔の狭いウェハカセット19内からのウェハ17の搬出およびウェハカセット19内へのウェハ17の搬入を確実に行うことができる。
【0036】
すなわち、図6は、ウェハカセット19の一部を示しており、このウェハカセット19では、左右の支持部材49の内面には、上下方向に所定間隔L1を置いて凹部49aが形成され、この凹部49aにウェハ17の外周部が支持されている。
従って、支持部材49に形成される凹部49aの間隔が狭くなると、ウェハ17の間に搬送アームを挿入することが困難になる。
【0037】
しかしながら、上述した第1の搬送アーム23では、第1の搬送アーム23の厚みAを小さくすることができるため、凹部49aの間隔L1が狭くなった場合にも、ウェハ17の間に第1の搬送アーム23を挿入することができる。
また、ウェハカセット19内に収容されるウェハ17に変形が生じている場合には、搬送アームの厚みが大きいと、搬送アームがウェハ17に衝突するおそれがあるが、第1の搬送アーム23の厚みAを小さくすることにより、第1の搬送アーム23がウェハ17に衝突するおそれを解消することができる。
【0038】
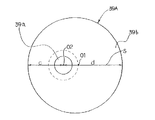
図7は、パッドの他の例を示すもので、このパッド39Aでは、パッド39Aに形成される吸引穴39aが、パッド39Aの中心からずれた位置に形成されている。
すなわち、パッド39Aの中心O1および吸引穴39aの中心O2を通る直線S上において、吸引穴39aの中心O2から外周までの距離が異なる長さc,dとされている。
【0039】
そして、点線で示す吸引穴39aの周縁部が、アーム部33のスペーサ41に固定される。
このパッド39Aは、ウェハ17の板厚が薄く、アーム部33における3カ所の吸着手段29の位置により、例えば、図5に示したように、同一の吸着手段29に、常に同じ傾向をもってウェハ17が載置されるような場合に好適する。
【0040】
すなわち、このパッド39Aでは、吸引穴39aの中心O2から外周までの距離が大きい方(距離d側)の弾性変形部39bが、より大きく撓むことができるため、変形の大きいウェハ17をより確実に吸着することができる。
なお、上述した実施形態では、パッド39,39Aの全体を弾性部材で形成し、スペーサ41の外側を弾性変形部39bとした例について説明したが、本発明はかかる実施形態に限定されるものではなく、例えば、パッドを2種類の素材により形成し、スペーサ41の外側に位置する部分のみを弾性部材により形成しても良い。
【0041】
また、上述した実施形態では、ウェハ17の吸着に本発明の吸着装置を適用した例について説明したが、本発明の吸着装置はかかる実施形態に限定されるものではなく、例えば、樹脂,金属等からなる部材の吸着に広く適用することができる。
さらに、上述した実施形態では、第1の搬送アーム23に配置される3カ所の吸着手段29の全てに本発明のパッド39を配置した例について説明したが、本発明はかかる実施形態に限定されるものではなく、例えば、1カ所の吸着手段29にのみ本発明のパッド39を配置しても良い。
【0042】
そして、この場合には、他の2カ所の吸着手段のアーム部にパッドの厚みと同一の厚みの受座を形成するのが望ましい。
また、上述した実施形態では、パッド39,39Aを円形状にした例について説明したが、本発明はかかる実施形態に限定されるものではなく、例えば、楕円形状等にしても良い。
【0043】
【発明の効果】
以上述べたように、本発明によれば、平板状のパッドの弾性変形部を、パッドの被吸着部材側の面と反対側の面との間の圧力差により、被吸着部材側に変形させて密着させることができるため、変形した被吸着部材を確実に吸着することができる。
【図面の簡単な説明】
【図1】本発明の搬送装置の一実施形態を示す上面図である。
【図2】図1の搬送装置を示す正面図である。
【図3】図1の第1の搬送アームを示す説明図である。
【図4】図3の第1の搬送アームのIV−IV線に沿う断面図である。
【図5】図4の吸着部に変形したウェハを吸着している状態を示す説明図である。
【図6】図2のウェハカセットの一部を示す説明図である。
【図7】図4のパッドの他の例を示す上面図である。
【符号の説明】
17 ウェハ
19 ウェハカセット
23 第1の搬送アーム
33 アーム部
37 吸着部
39 パッド
39b 弾性変形部
W 間隙
【発明の属する技術分野】
本発明は、ウェハ等の被吸着部材を吸着する吸着装置およびこの吸着装置を用いた搬送装置に関する。
【0002】
【従来の技術】
従来、例えば、ウェハの外観検査に用いられるウェハ外観検査装置では、目視によるマクロ検査、顕微鏡によるミクロ検査等のために、ウェハを吸着装置で吸着して搬送することが行われている。
そして、従来、ウェハを吸着する吸着装置は、搬送用のアーム部に、例えば、3カ所の吸着部を形成し、吸着部に配置されるパッドに、ウェハを真空吸着するように構成されている。
【0003】
このような吸着装置では、ウェハを3カ所で吸着するため、ウェハを安定して確実に支持することができる。
なお、従来、搬送アームによりウェハを吸着して搬送する搬送装置が知られている(例えば、特許文献1参照)。
【特許文献1】
特開平11−124231号公報
【0004】
【発明が解決しようとする課題】
しかしながら、このような従来の吸着装置では、ウェハを複数カ所で吸着しているため、ウェハが変形しているとウェハを安定して支持することが困難になるという問題があった。
【0005】
すなわち、近年、ウェハの肉厚が薄くなる傾向にあり、薄肉のウェハでは、自重やパターン焼き付けによる変形が生じやすく、かつ、その変形は、お椀型、円筒型、あるいは、これに捩れが加わったりしており、非常に多様である。
そして、このようにウェハが変形していると、ウェハに全てのパッドを当接させることができなくなり、一部のパッドとウェハとの間に間隙が生じ、ウェハを安定して吸着することが困難になる。
【0006】
本発明は、かかる従来の問題を解決したもので、変形した被吸着部材を確実に吸着することができる吸着装置および搬送装置を提供することを目的とする。
【0007】
【課題を解決するための手段】
請求項1の吸着装置は、本体部と、前記本体部に形成され、吸引穴を有する吸着部と、前記吸着部に固定され被吸着部材に当接される平板状のパッドとを備え、前記パッドは、前記吸引穴に通じる穴部を有し、かつ、外周部に弾性変形部が形成されていることを特徴とする。
【0008】
請求項2の吸着装置は、請求項1記載の吸着装置において、前記パッドの前記弾性変形部と前記本体部との間に、間隙が形成されていることを特徴とする。
請求項3の搬送装置は、複数枚のウェハが収容されるカセット部内に移動可能であり、前記ウェハを吸着するための吸着部を有する搬送アームと、前記搬送アームの前記吸着部に固定され前記ウェハに当接される平板状のパッドと、前記搬送アームを移動させ前記ウェハの前記カセット部からの搬出またはカセット部への搬入をする駆動手段とを備え、前記吸着部は吸引穴を有し、前記パッドは、前記吸引穴に通じる穴部を有し、かつ、外周部に弾性変形部が形成されていることを特徴とする。
【0009】
【発明の実施の形態】
以下、本発明の実施形態を図面を用いて詳細に説明する。
図1および図2は、本発明が適用されるウェハ外観検査装置を示している。
このウェハ外観検査装置は、カセット載置部11、マクロ検査部13、ミクロ検査部15を有している。
【0010】
カセット載置部11には、図2に示すように、複数のウェハ17が格納されるウェハカセット19が載置される。
マクロ検査部13では、ウェハ17が目視で検査される。
ミクロ検査部15では、ウェハ17が顕微鏡21を用いて検査される。
マクロ検査部13には、吸着装置である第1の搬送アーム23、ウェハ保持アーム25、第2の搬送アーム27が配置されている。
【0011】
第1の搬送アーム23は、ウェハカセット19とマクロ検査部13との間のウェハ17の受け渡しを行う。
ウェハ保持アーム25は、マクロ検査部13において、例えば、ウェハ17の裏面を検査する時に使用される。
【0012】
第2の搬送アーム27は、マクロ検査部13とミクロ検査部15との間のウェハ17の受け渡しを行う。
第1の搬送アーム23、ウェハ保持アーム25および第2の搬送アーム27には、それぞれ3カ所に吸着手段29が配置されている。
上述したウェハ外観検査装置では、第1の搬送アーム23がウェハカセット19内に挿入されることにより、ウェハカセット19内に収容されているウェハ17が、第1の搬送アーム23により吸着保持され、マクロ検査部13に搬送される。
【0013】
マクロ検査部13において、操作者により、マクロ検査を行うための指示がなされると、図示しない駆動手段により、ウェハ保持アーム25が上昇され、吸着を解除された第1の搬送アーム23上のウェハ17が、ウェハ保持アーム25上に載置されウェハ保持アーム25に吸着される。
ウェハ17を吸着したウェハ保持アーム25は、所定の高さで上昇を停止され、操作者の指示に基づいて、図示しない駆動手段により、任意の方向に回転され、マクロ検査が行われる。
【0014】
マクロ検査の終了の指示が、操作者によってなされると、ウェハ保持アーム25は、ウェハ17のパターン面を上にして、ウェハ17を水平状態にして、下降を開始する。
ウェハ保持アーム25が所定の高さとなった時点で、ウェハ保持アーム25は、ウェハ17の吸着を解除して下降を停止する。
【0015】
この後、操作者により、ミクロ検査を行うための指示がなされると、第2の搬送アーム27が、ウェハ保持アーム25より下の位置から上昇し、吸着を解除されたウェハ保持アーム25上のウェハ17が、第2の搬送アーム27上に載置され、第2の搬送アーム27に吸着される。
ウェハ17を吸着した第2の搬送アーム27は、所定の高さで上昇を停止され、図示しない駆動手段により、図1の矢符方向に移動される。
【0016】
そして、ウェハ17の吸着を解除した後、ミクロ検査部15のXYステージ31にウェハ17が受け渡され、顕微鏡21を用いて、ウェハ17のミクロ検査が行われる。
ミクロ検査の終了の指示が操作者によってなされると、第2の搬送アーム27は、ミクロ検査部15のXYステージ31の位置より低い位置から上昇し、XYステージ31上のウェハ17を吸着する。
【0017】
ウェハ17を吸着した第2の搬送アーム27は、図1の矢符と逆の方向に移動した後、所定位置まで下降し、ウェハ17の吸着を解除する。
この時、第2の搬送アーム27より低い位置にある第1の搬送アーム23は、上昇を開始し、第2の搬送アーム27上のウェハ17を吸着して、ウェハカセット19に、検査されたウェハ17を搬送する。
【0018】
図3は、上述した第1の搬送アーム23の詳細を示すもので、図3(a)は第1の搬送アーム23の上面図、図3(b)は側面図である。
第1の搬送アーム23の本体部であるアーム部33には、その3カ所に吸着手段29が配置されている。
3カ所の吸着手段29は、吸着されるウェハ17の中心となる位置Oから、所定の角度を置いて、ほぼ同心状に配置されている。
【0019】
アーム部33の吸着手段29が配置された面と反対側の面には、真空引き用のチューブ35が接続されている。
図4は、吸着手段29の詳細を示すもので、この吸着手段29は、アーム部33に形成される吸着部37と、吸着部37に配置されるパッド39とを有している。
【0020】
吸着部37には、円形状の吸引穴33aが形成されている。
この吸引穴33aは、アーム部33に形成される断面矩形状の連通穴33bを介して、チューブ35に連通されている。
アーム部33における吸引穴33aの周縁には、円環状のスペーサ41が接着等により固定されている。
【0021】
このスペーサ41は、例えば、0.1mm程度の肉厚を有しており、金属,接着剤,両面テープ等により形成されている。
なお、このスペーサ41は、アーム部33に直接突出部を形成し、アーム部33と一体に形成してもよく、あるいは、パッド39と一体成形でもよい。
スペーサ41には、円形状のパッド39が接着等により固定されている。
【0022】
パッド39の中央には、アーム部33の吸引穴33aと同一径の吸引穴39aが形成され、吸引穴39aの周縁が、スペーサ41に固定されている。
なお、パッド39の吸引穴39aは、アーム部33の吸引穴33aと同一径でなくてもよい。吸引穴39aの径は、吸引穴33aの径より小さくてもよい。さらに、パッド39の吸引穴39aとしては、小さい径の穴を複数設けてもよい。
【0023】
パッド39は、平板状をしており、スペーサ41の外側が弾性変形部39bとされている。
パッド39は、例えば、0.02mm〜0.05mm程度の薄肉をしており、弾性材料により形成されている。
弾性材料には、例えば、樹脂系,ゴム系,金属系等の材料を使用することができる。
【0024】
樹脂系の弾性材料としては、ポリミド樹脂,アセタール樹脂,ポリエーテルエーテルケトン等が好適する。
また、ゴム系の弾性材料としては、フッ素ゴムが、金属系の弾性材料としては、ステンレススティール,アルミ合金等が好適する。
そして、パッド39の弾性変形部39bとアーム部33との間には、スペーサ41の肉厚に対応する寸法の間隙Wが形成されている。
【0025】
なお、この実施形態では、ウェハ保持アーム25および第2の搬送アーム27に形成される吸着手段29も第1の搬送アーム23に形成される吸着手段29と同様に形成されている。
図5は、変形したウェハ17を、第1の搬送アーム23の吸着手段29により吸着する時の状態を示している。
【0026】
このウェハ17は、円盤状をしており、例えば、外径を200mm、肉厚を250μmとされている。
従って、一般の半導体製造関連で規定されるウェハの標準的な肉厚に対し約1/3から1/4になっており、それに比例して重量も軽くなっている。
また、このウェハ17は、肉厚が薄いため、例えば、前加工の研磨加工により、比較的大きな変形が生じている。
【0027】
この変形は、例えば、鞍状をしており、平面に対する最大変形量が、例えば、1mm程度とされている。
図5において、アーム部33に形成される連通穴33bには、チューブ35が連通されている。
チューブ35は、真空制御弁43を介して、真空源45に接続されている。
【0028】
真空制御弁43は、2位置切替電磁弁からなり、吸着部37への空気供給を、真空側および大気側に切り替える。
これにより、吸着部37で、ウェハ17の吸着と吸着の解除との切り替えが行われる。
図5では、ウェハ17の変形に起因して、吸着手段29にウェハ17を単に載置した状態では、ウェハ17の一部のみが、吸着手段29のパッド39の外周の片側にのみ当接され、パッド39の外周の他側とウェハ17との間に間隙Lが形成されている。
【0029】
この状態で、真空制御弁43を、真空側に切り替えると、吸着部37が真空引きされ、パッド39とウェハ17との間の空間部47の圧力が低下し、パッド39のウェハ17側の面39c(以下上面という)と反対側の面39d(以下下面という)との間に圧力差が生じる。
この実施形態では、図4に示したように、パッド39の弾性変形部39bと第1の搬送アーム23のアーム部33との間に、スペーサ41により間隙Wが形成されているため、この間隙Wからパッド39の下面39d側に大気が確実に流入しており、パッド39の下面39d側の圧力は大気圧となっている。
【0030】
そして、パッド39の上面39c側に作用する圧力が大気圧より小さくなり、下面39d側には、大気圧が作用するため、パッド39の弾性変形部39bは、その圧力差により、ウェハ17側に向けて図に破線で示すように弾性変形する。パッド39の弾性変形部39bが、このようにしてウェハ17側に弾性変形すると、弾性変形部39bとウェハ17との間隙がより小さくなり、パッド39とウェハ17との間の空間部47に流入する大気が減少し、空間部47の圧力がより低下する。
【0031】
これにより、パッド39の上面39c側と下面39d側との圧力差がより増大し、図に二点鎖線で示すように弾性変形部39bが、ウェハ17に密着され、ウェハ17が吸着部37に確実に吸着される。
一方、この吸着状態で、真空制御弁43を、真空側から大気側に切り替えると、吸着部37に大気が流入し、パッド39とウェハ17との間の空間部47の圧力が大気圧となり、パッド39の上面39cと下面39dとの圧力が同じになる。
【0032】
そして、パッド39の弾性変形部39bの弾性により、弾性変形部39bが図の実線の位置に戻り、ウェハ17の吸着部37への吸着が解除される。
上述した第1の搬送アーム23(請求項1および請求項2の吸着装置の実施形態に対応する)では、平板状のパッド39の弾性変形部39bが、パッド39のウェハ17側の面39cと反対側の面39dとの間の圧力差により、ウェハ17側に変形して密着するため、変形したウェハ17を確実に吸着することができる。
【0033】
そして、ウェハ17を複数カ所で吸着する場合に、ウェハ17が変形していても、ウェハ17に全てのパッド39を密着させることが可能になり、ウェハ17を安定して支持することができる。
また、パッド39の弾性変形部39bと第1の搬送アーム23のアーム部33との間に、スペーサ41により、間隙Wを形成したので、間隙Wからパッド39の下面39d側に大気が確実に流入し、これによりパッド39の弾性変形部39bをウェハ17側に確実に変形させることができる。
【0034】
そして、上述したウェハ外観検査装置(請求項3の搬送装置の実施形態に対応する)では、第1の搬送アーム23の吸着部37に配置される平板状のパッド39の弾性変形部39bが、パッド39のウェハ17側の面39cと反対側の面39dとの間の圧力差により、ウェハ17側に変形して密着するため、変形したウェハ17を確実に吸着することができる。
【0035】
また、パッド39が肉厚の薄い平板状をしているため、パッド39の厚みにアーム部33の厚みを加えた、第1の搬送アーム23の厚みを小さくすることができる。
そして、第1の搬送アーム23の厚みを小さくすることが可能になるため、ウェハ17の収納間隔の狭いウェハカセット19内からのウェハ17の搬出およびウェハカセット19内へのウェハ17の搬入を確実に行うことができる。
【0036】
すなわち、図6は、ウェハカセット19の一部を示しており、このウェハカセット19では、左右の支持部材49の内面には、上下方向に所定間隔L1を置いて凹部49aが形成され、この凹部49aにウェハ17の外周部が支持されている。
従って、支持部材49に形成される凹部49aの間隔が狭くなると、ウェハ17の間に搬送アームを挿入することが困難になる。
【0037】
しかしながら、上述した第1の搬送アーム23では、第1の搬送アーム23の厚みAを小さくすることができるため、凹部49aの間隔L1が狭くなった場合にも、ウェハ17の間に第1の搬送アーム23を挿入することができる。
また、ウェハカセット19内に収容されるウェハ17に変形が生じている場合には、搬送アームの厚みが大きいと、搬送アームがウェハ17に衝突するおそれがあるが、第1の搬送アーム23の厚みAを小さくすることにより、第1の搬送アーム23がウェハ17に衝突するおそれを解消することができる。
【0038】
図7は、パッドの他の例を示すもので、このパッド39Aでは、パッド39Aに形成される吸引穴39aが、パッド39Aの中心からずれた位置に形成されている。
すなわち、パッド39Aの中心O1および吸引穴39aの中心O2を通る直線S上において、吸引穴39aの中心O2から外周までの距離が異なる長さc,dとされている。
【0039】
そして、点線で示す吸引穴39aの周縁部が、アーム部33のスペーサ41に固定される。
このパッド39Aは、ウェハ17の板厚が薄く、アーム部33における3カ所の吸着手段29の位置により、例えば、図5に示したように、同一の吸着手段29に、常に同じ傾向をもってウェハ17が載置されるような場合に好適する。
【0040】
すなわち、このパッド39Aでは、吸引穴39aの中心O2から外周までの距離が大きい方(距離d側)の弾性変形部39bが、より大きく撓むことができるため、変形の大きいウェハ17をより確実に吸着することができる。
なお、上述した実施形態では、パッド39,39Aの全体を弾性部材で形成し、スペーサ41の外側を弾性変形部39bとした例について説明したが、本発明はかかる実施形態に限定されるものではなく、例えば、パッドを2種類の素材により形成し、スペーサ41の外側に位置する部分のみを弾性部材により形成しても良い。
【0041】
また、上述した実施形態では、ウェハ17の吸着に本発明の吸着装置を適用した例について説明したが、本発明の吸着装置はかかる実施形態に限定されるものではなく、例えば、樹脂,金属等からなる部材の吸着に広く適用することができる。
さらに、上述した実施形態では、第1の搬送アーム23に配置される3カ所の吸着手段29の全てに本発明のパッド39を配置した例について説明したが、本発明はかかる実施形態に限定されるものではなく、例えば、1カ所の吸着手段29にのみ本発明のパッド39を配置しても良い。
【0042】
そして、この場合には、他の2カ所の吸着手段のアーム部にパッドの厚みと同一の厚みの受座を形成するのが望ましい。
また、上述した実施形態では、パッド39,39Aを円形状にした例について説明したが、本発明はかかる実施形態に限定されるものではなく、例えば、楕円形状等にしても良い。
【0043】
【発明の効果】
以上述べたように、本発明によれば、平板状のパッドの弾性変形部を、パッドの被吸着部材側の面と反対側の面との間の圧力差により、被吸着部材側に変形させて密着させることができるため、変形した被吸着部材を確実に吸着することができる。
【図面の簡単な説明】
【図1】本発明の搬送装置の一実施形態を示す上面図である。
【図2】図1の搬送装置を示す正面図である。
【図3】図1の第1の搬送アームを示す説明図である。
【図4】図3の第1の搬送アームのIV−IV線に沿う断面図である。
【図5】図4の吸着部に変形したウェハを吸着している状態を示す説明図である。
【図6】図2のウェハカセットの一部を示す説明図である。
【図7】図4のパッドの他の例を示す上面図である。
【符号の説明】
17 ウェハ
19 ウェハカセット
23 第1の搬送アーム
33 アーム部
37 吸着部
39 パッド
39b 弾性変形部
W 間隙
Claims (3)
- 本体部と、
前記本体部に形成され、吸引穴を有する吸着部と、
前記吸着部に固定され被吸着部材に当接される平板状のパッドとを備え、
前記パッドは、前記吸引穴に通じる穴部を有し、かつ、外周部に弾性変形部が形成されていることを特徴とする吸着装置。 - 請求項1記載の吸着装置において、
前記パッドの前記弾性変形部と前記本体部との間に、間隙が形成されていることを特徴とする吸着装置。 - 複数枚のウェハが収容されるカセット部内に移動可能であり、前記ウェハを吸着するための吸着部を有する搬送アームと、
前記搬送アームの前記吸着部に固定され前記ウェハに当接される平板状のパッドと、
前記搬送アームを移動させ前記ウェハの前記カセット部からの搬出またはカセット部への搬入をする駆動手段とを備え、
前記吸着部は吸引穴を有し、前記パッドは、前記吸引穴に通じる穴部を有し、かつ、外周部に弾性変形部が形成されていることを特徴とする搬送装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002326991A JP2004165276A (ja) | 2002-11-11 | 2002-11-11 | 吸着装置および搬送装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002326991A JP2004165276A (ja) | 2002-11-11 | 2002-11-11 | 吸着装置および搬送装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2004165276A true JP2004165276A (ja) | 2004-06-10 |
Family
ID=32805777
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002326991A Pending JP2004165276A (ja) | 2002-11-11 | 2002-11-11 | 吸着装置および搬送装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2004165276A (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007101402A (ja) * | 2005-10-05 | 2007-04-19 | Shin Etsu Polymer Co Ltd | 粘着力兼厚み測定装置及びその測定方法 |
| KR20210030726A (ko) * | 2019-09-10 | 2021-03-18 | 세메스 주식회사 | 기판 반송 로봇 및 기판 처리 설비 |
| JP2023146249A (ja) * | 2022-03-29 | 2023-10-12 | 株式会社東京精密 | 保持装置及び搬送装置 |
| KR20240093182A (ko) * | 2022-12-15 | 2024-06-24 | 세메스 주식회사 | 반송 유닛 및 이를 포함하는 기판 처리 장치 |
| KR102952825B1 (ko) * | 2022-03-29 | 2026-04-16 | 가부시키가이샤 도교 세이미쓰 | 유지 장치 및 반송 장치 |
-
2002
- 2002-11-11 JP JP2002326991A patent/JP2004165276A/ja active Pending
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007101402A (ja) * | 2005-10-05 | 2007-04-19 | Shin Etsu Polymer Co Ltd | 粘着力兼厚み測定装置及びその測定方法 |
| KR20210030726A (ko) * | 2019-09-10 | 2021-03-18 | 세메스 주식회사 | 기판 반송 로봇 및 기판 처리 설비 |
| KR102298088B1 (ko) * | 2019-09-10 | 2021-09-02 | 세메스 주식회사 | 기판 반송 로봇 및 기판 처리 설비 |
| JP2023146249A (ja) * | 2022-03-29 | 2023-10-12 | 株式会社東京精密 | 保持装置及び搬送装置 |
| KR102952825B1 (ko) * | 2022-03-29 | 2026-04-16 | 가부시키가이샤 도교 세이미쓰 | 유지 장치 및 반송 장치 |
| KR20240093182A (ko) * | 2022-12-15 | 2024-06-24 | 세메스 주식회사 | 반송 유닛 및 이를 포함하는 기판 처리 장치 |
| KR102809797B1 (ko) * | 2022-12-15 | 2025-05-16 | 세메스 주식회사 | 반송 유닛 및 이를 포함하는 기판 처리 장치 |
| US12593653B2 (en) | 2022-12-15 | 2026-03-31 | Semes Co., Ltd. | Transfer unit and substrate treatment apparatus including the same |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN110870057B (zh) | 基板保持装置 | |
| JP4724562B2 (ja) | 真空吸着ヘッド、その真空吸着ヘッドを用いた真空吸着装置及びテーブル | |
| EP3605597B1 (en) | Silicon chip holding device, silicon chip conveying device, silicon chip delivery system and conveying method | |
| JPWO2003071599A1 (ja) | 基板吸着装置 | |
| JP5381865B2 (ja) | ウェハ搬送装置およびウェハ搬送方法 | |
| JP2001179672A (ja) | ロボットハンド | |
| JP2014130904A (ja) | 貼合装置および貼合処理方法 | |
| KR100417571B1 (ko) | 판상재의 척 및 흡인반 | |
| JP7110932B2 (ja) | 搬送設備 | |
| JP7717553B2 (ja) | 接合装置及び接合方法 | |
| JP2004055833A (ja) | 薄板状部材の吸着装置 | |
| JP4797027B2 (ja) | 基板体の貼着装置及び基板体の取り扱い方法 | |
| JP2014135390A (ja) | 基板搬送装置、基板検査装置及び基板搬送方法 | |
| CN117766452A (zh) | 一种翘曲晶圆的搬运装置和晶圆减薄装备 | |
| JPH03270048A (ja) | 真空チャック | |
| JP2004165276A (ja) | 吸着装置および搬送装置 | |
| JP2002127070A (ja) | 板状体保持装置 | |
| JP2003245886A (ja) | 吸着機構 | |
| JP4671841B2 (ja) | 対象物間の脱ガス方法および脱ガス装置 | |
| WO2007119613A1 (ja) | 搬送装置、搬送方法、およびデバイス製造方法 | |
| JPH0672974U (ja) | 搬送装置 | |
| JP2014130899A (ja) | 基板搬送装置、基板検査装置及び基板搬送方法 | |
| JP2004322218A (ja) | 真空吸着装置 | |
| JP5329916B2 (ja) | 半導体ウエハの支持具 | |
| JPH08195429A (ja) | 真空吸着装置 |