JP2004178441A - 車線逸脱防止装置 - Google Patents
車線逸脱防止装置 Download PDFInfo
- Publication number
- JP2004178441A JP2004178441A JP2002346377A JP2002346377A JP2004178441A JP 2004178441 A JP2004178441 A JP 2004178441A JP 2002346377 A JP2002346377 A JP 2002346377A JP 2002346377 A JP2002346377 A JP 2002346377A JP 2004178441 A JP2004178441 A JP 2004178441A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- lane
- traveling lane
- traveling
- detected
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images







Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T2201/00—Particular use of vehicle brake systems; Special systems using also the brakes; Special software modules within the brake system controller
- B60T2201/08—Lane monitoring; Lane Keeping Systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T2201/00—Particular use of vehicle brake systems; Special systems using also the brakes; Special software modules within the brake system controller
- B60T2201/08—Lane monitoring; Lane Keeping Systems
- B60T2201/085—Lane monitoring; Lane Keeping Systems using several actuators; Coordination of the lane keeping system with other control systems
Landscapes
- Traffic Control Systems (AREA)
Abstract
【解決手段】走行車線をロストしたとき、車線逸脱防止のために制動力制御による目標ヨーモーメントMS が設定されており、且つ自車両が未だ逸脱傾向にあったときには、当該目標ヨーモーメントMS と等価な操舵角δM に基づいて撮像画面中にレーンマーカ検出領域を設定し、同じく目標ヨーモーメントMS が設定されており、且つ既に自車両が逸脱から復帰しているときには、前記目標ヨーモーメントMS と等価な操舵角δM の逆向きの操舵角に基づいてレーンマーカ検出領域を設定する。
【選択図】 図2
Description
【発明の属する技術分野】
本発明は、走行中に自車両が走行車線から逸脱しそうになったときに、その逸脱を防止する車線逸脱防止装置に関するものである。
【0002】
【従来の技術】
従来、このような車線逸脱防止装置としては、例えば自車両が走行車線から逸脱しそうになるのを判断し、走行車線の基準位置に対する自車両の走行位置の横ずれ量に応じて、運転者が容易に打ち勝てる程度の操舵制御トルクを操舵アクチュエータにより出力することで車線逸脱を防止するものがある(例えば特許文献1参照)。また、このような車線逸脱防止装置では、常に車線を検出し続けることが望まれる。そこで、例えば操舵角を道路パラメータとし、その道路パラメータから白線等のレーンマーカモデルを設定するものがある(例えば特許文献2参照)。
【0003】
【特許文献1】
特開平11−96497号公報
【特許文献2】
特開平11−296660号公報
【0004】
【発明が解決しようとする課題】
ところで、前記従来の車線逸脱防止装置では、操舵アクチュエータを必要とするため、例えばアンチスキッド制御装置や駆動力制御装置を用いて各車輪の制動力或いは駆動力を制御し、その結果、車両にヨーモーメントを発生せしめて自車両の走行方向、或いは走行位置を制御することが考えられる。
【0005】
しかしながら、このように各車輪の制駆動力を制御して車線逸脱防止装置を構成しようとしたとき、操舵入力以外にも、前記制駆動力制御によるヨーモーメントによって走行車線に対する自車両の向きが変化してしまう。つまり、操舵角と実際の車両の向きとは異なることになるので、前述のように操舵角を用いて走行車線を検出しようとしても、検出できない恐れがある。このことは、特に自車両が逸脱傾向にあり、それを前記ヨーモーメントによって防止しようとしているときに、車線を見失う、所謂ロストした後、顕著になる。
本発明はこれらの諸問題に鑑みて開発されたものであり、ヨーモーメントによって車線逸脱を防止するにあたり、走行車線を見失った後に走行車線を確実に検出する車線逸脱防止装置を提供することを目的とするものである。
【0006】
【課題を解決するための手段】
前記課題を解決するために、本発明の車線逸脱防止装置は、自車両の走行車線を検出し、自車両が走行車線から逸脱傾向にあることが検出されたときに、自車両の走行車線からの逸脱を回避する方向にヨーモーメントが発生するように車両の挙動を制御すると共に、自車両の走行車線を検出できなくなったとき、当該走行車線を検出できなくなったときの車両挙動制御状態に応じて自車両の走行車線を検出することを特徴とするものである。
【0007】
【発明の効果】
而して、本発明の車線逸脱防止装置によれば、自車両の走行車線を検出し、自車両が走行車線から逸脱傾向にあることが検出されたときに、自車両の走行車線からの逸脱を回避する方向にヨーモーメントが発生するように車両の挙動を制御すると共に、自車両の走行車線を検出できなくなったとき、当該走行車線を検出できなくなったときの車両挙動制御状態に応じて自車両の走行車線を検出する構成としたため、ヨーモーメントによる自車両の向きの変化を考慮して、見失った後のレーンマーカ等による走行車線を検出し易くなる。
【0008】
【発明の実施の形態】
以下、本発明の車線逸脱防止装置の第1実施形態を添付図面に基づいて説明する。
図1は、本実施形態の車線逸脱防止装置の一例を示す車両概略構成図である。この車両には、自動変速機及びコンベンショナルディファレンシャルギヤを搭載した後輪駆動車両であり、制動装置は、前後輪とも、左右輪の制動力を独立に制御可能としている。
【0009】
図中の符号1はブレーキペダル、2はブースタ、3はマスタシリンダ、4はリザーバであり、通常は、運転者によるブレーキペダル1の踏込み量に応じ、マスタシリンダ3で昇圧された制動流体圧が、各車輪5FL〜5RRの各ホイールシリンダ6FL〜6RRに供給されるようになっているが、このマスタシリンダ3と各ホイールシリンダ6FL〜6RRとの間には制動流体圧制御回路7が介装されており、この制動流体圧制御回路7内で、各ホイールシリンダ6FL〜6RRの制動流体圧を個別に制御することも可能となっている。
【0010】
前記制動流体圧制御回路7は、例えばアンチスキッド制御やトラクション制御に用いられる制動流体圧制御回路を利用したものであり、この実施形態では、各ホイールシリンダ6FL〜6RRの制動流体圧を、単独で増減圧することができるように構成されている。この制動流体圧制御回路7は、後述する制駆動力コントロールユニット8からの制動流体圧指令値に応じて各ホイールシリンダ6FL〜6RRの制動流体圧を制御する。
【0011】
また、この車両は、エンジン9の運転状態、自動変速機10の選択変速比、並びにスロットルバルブ11のスロットル開度を制御することにより、駆動輪である後輪5RL、5RRへの駆動トルクを制御する駆動トルクコントロールユニット12が設けられている。エンジン9の運転状態制御は、例えば燃料噴射量や点火時期を制御することによって制御することができるし、同時にスロットル開度を制御することによっても制御することができる。なお、この駆動トルクコントロールユニット12は、単独で、駆動輪である後輪5RL、5RRの駆動トルクを制御することも可能であるが、前述した制駆動力コントロールユニット8から駆動トルクの指令値が入力されたときには、その駆動トルク指令値を参照しながら駆動輪トルクを制御する。
【0012】
また、この車両には、自車両の走行車線逸脱防止判断用に走行車線内の自車両の位置を検出するための外界認識センサとして、CCDカメラ13及びカメラコントローラ14を備えている。このカメラコントローラ14では、CCDカメラ13で捉えた自車両前方の撮像画像から、例えば白線等のレーンマーカを検出して走行車線を検出すると共に、その走行車線に対する自車両のヨー角φ、走行車線中央からの横変位X、走行車線の曲率β、走行車線幅L等を算出することができるように構成されている。なお、このカメラコントローラ14は、前記制駆動力コントロールユニット8から走行車線検出エリアが入力された場合には、後述するように当該走行車線検出エリアを用いて走行車線検出を行い、その検出された走行車線に対して前記各データを算出する。
【0013】
また、この車両には、自車両に発生する前後加速度Xg及び横加速度Ygを検出する加速度センサ15、自車両に発生するヨーレートφ’ を検出するヨーレートセンサ16、前記マスタシリンダ3の出力圧、所謂マスタシリンダ圧Pm を検出するマスタシリンダ圧センサ17、アクセルペダルの踏込み量、即ちアクセル開度Accを検出するアクセル開度センサ18、ステアリングホイール21の操舵角δを検出する操舵角センサ19、各車輪5FL〜5RRの回転速度、所謂車輪速度Vwi (i=FL〜RR)を検出する車輪速度センサ22FL〜22RR、方向指示器による方向指示操作を検出する方向指示スイッチ20が備えられ、それらの検出信号は前記制駆動力コントロールユニット8に出力される。また、前記カメラコントローラ14で検出された走行車線に対する自車両のヨー角φ、走行車線中央からの横変位X、走行車線の曲率β、走行車線幅L等や、駆動トルクコントロールユニット12で制御された駆動トルクTwも合わせて制駆動力コントロールユニット8に出力される。なお、検出された車両の走行状態データに左右の方向性がある場合には、何れも左方向を正方向とする。即ち、ヨーレートφ’ や横加速度Yg、操舵角δ、ヨー角φは、左旋回時に正値となり、横変位Xは、走行車線中央から左方にずれているときに正値となる。
【0014】
次に、前記制駆動力コントロールユニット8で行われる演算処理のロジックについて、図2のフローチャートに従って説明する。この演算処理は、例えば10msec. 毎の所定サンプリング時間ΔT毎にタイマ割込によって実行される。なお、このフローチャートでは通信のためのステップを設けていないが、演算処理によって得られた情報は随時記憶装置に更新記憶されると共に、必要な情報は随時記憶装置から読出される。
【0015】
この演算処理では、まずステップS1で、前記各センサやコントローラ、コントロールユニットからの各種データを読込む。具体的には、前記各センサで検出された前後加速度Xg、横加速度Yg、ヨーレートφ’ 、各車輪速度Vwi 、アクセル開度Acc、マスタシリンダ圧Pm 、操舵角δ、方向指示スイッチ信号、また駆動トルクコントロールユニット12からの駆動トルクTwを読込む。また、このステップS1では、合わせて、で読込んだ各車輪速度Vwi のうち、非駆動輪である前左右輪速度VwFL、VwFRの平均値から自車両の走行速度Vを算出する。なお、この時点では、カメラコントローラ14からの走行車線に対する自車両のヨー角φ、走行車線中央からの横変位X、走行車線の曲率β、走行車線幅Lは未だ読込まない。
【0016】
次にステップS2に移行して、この図2の演算処理の前回演算処理時に、白線等のレーンマーカからなる走行車線を検出していたかは否かを判定し、前回演算時に走行車線を検出していた場合にはステップS3に移行し、そうでない場合にはステップS4に移行する。
前記ステップS4では、後述する逸脱防止制御作動フラグFが“1”のセット状態であるか否かを判定し、当該逸脱防止制御作動フラグFがセット状態である場合にはステップS5に移行し、そうでない場合には前記ステップS3に移行する。
【0017】
前記ステップS5では、走行車線を見失った(ロストした)とき、自車両は逸脱傾向であったか、或いは逸脱傾向から復帰した後であったかを判定し、逸脱傾向であった場合にはステップS6に移行し、復帰後であった場合にはステップS7に移行する。
前記ステップS3では、例えば前記特開平11−296660号公報に記載される手法を用い、前記ステップS1で読込んだ操舵角δに基づいて後述する走行車線検出エリアを設定してからステップS8に移行する。
【0018】
また、前記ステップS6では、前回の演算処理時に、後述するステップS10で算出された目標ヨーモーメントMS から、下記1式に従って当該目標ヨーモーメントMS に相当する等価操舵角δM を算出し、その等価操舵角δM に基づいて前記走行車線検出エリアを設定してから前記ステップS8に移行する。
δM =MS /(Wf ×Cf /GS ) ……… (1)
但し、
Wf :フロントホイールベース
Cf :前輪コーナリングパワ
GS :ステアリングギヤ比
である。
【0019】
一方、前記ステップS7では、前記1式で算出される等価操舵角δM の負値(図では逆等価操舵角)に基づいて前記走行車線検出エリアを設定してから前記ステップS8に移行する。
前記ステップS8では、例えば前記特開平11−296660号公報に記載される手法を用い、前記ステップS3或いはステップS6或いはステップS7で設定された走行車線検出エリアに基づいて自車両が走行している走行車線を検出するように前記カメラコントローラ14に指示し、合わせて当該走行車線に対する自車両のヨー角φ、走行車線中央からの横変位X、走行車線の曲率β、走行車線幅Lを算出し、それらのデータを読込む。
【0020】
次にステップS9に移行して、前記ステップS8で走行車線が検出されたか否かを判定し、走行車線が検出されている場合にはステップS10に移行し、そうでない場合にはステップS11に移行する。
前記ステップS10では、前記逸脱防止制御作動フラグFを“0”のリセット状態としてからステップS13に移行する。
【0021】
前記ステップS13では、逸脱推定値として将来の推定横変位XSを算出してからステップS14に移行する。具体的には、前記ステップS8で読込んだ自車両の走行車線に対するヨー角φ、走行車線中央からの横変位X、走行車線の曲率β及び前記ステップS2で算出した自車両の走行速度Vを用い、下記2式に従って将来の推定横変位XSを算出する。
【0022】
XS=Tt×V×(φ+Tt×V×β)+X ……… (2)
ここで、Ttは前方注視距離算出用の車頭時間であり、車頭時間Ttに自車両の走行速度Vを乗じると前方注視距離になる。つまり、車頭時間Tt後の走行車線中央からの横変位推定値が将来の推定横変位XSとなる。後述するように、本実施形態では、この将来の推定横変位XSが所定の横変位限界値以上となるときに自車両は走行車線を逸脱する可能性がある、或いは逸脱傾向にあると判断するのである。
【0023】
前記ステップS14では、自車両が走行車線から逸脱傾向にあるか否かの判断を行ってから前記ステップS15に移行する。具体的には、前記ステップS13で算出した逸脱推定値としての将来の推定横変位の絶対値|XS|が、前記横変位限界値XC 以上であるときに自車両が走行車線から逸脱傾向にあるとして逸脱判断フラグFLDをセットし、そうでないときには自車両は走行車線から逸脱傾向にはないとして逸脱判断フラグFLDをリセット状態とする。なお、前記方向指示スイッチ20からの入力によって推定される車線変更方向と、自車両の走行車線からの逸脱方向とが一致するときには逸脱判断フラグFLDをリセット状態とする。また、このステップS14で、自車両が走行車線から逸脱傾向にあることを警報するか否かの判断を行ってもよい。具体的には、前記ステップS13で算出した逸脱推定値としての将来の推定横変位の絶対値|XS|が、前記ステップS8で読込んだ走行車線幅Lの半分値から自車両の車幅L0 の半分値を減じた横変位限界値XC 以上であるときに警報するとし、そうでないときには警報しないものとするなどの手法が考えられる。
【0024】
一方、前記ステップS11では、前述した走行車線見失い時に逸脱防止制御が作動していたか否かを判定し、つまり前記目標ヨーモーメントに応じた制駆動力制御が介入していたか否かを判定し、走行車線見失い時に逸脱防止制御が作動していた場合にはステップS18に移行し、そうでない場合にはステップS19に移行する。
【0025】
前記ステップS18では、前記逸脱防止制御作動フラグFを“1”のセット状態としてから前記ステップS15に移行する。
また、前記ステップS19では、前記逸脱防止制御作動フラグFを“0”にリセットしてから前記ステップS15に移行する。
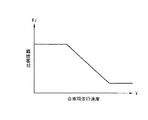
前記ステップS15では、前記目標ヨーモーメントMS を算出設定する。ここでは、前記逸脱判断フラグFLDがセットされているときにだけ目標ヨーモーメントMS を設定するので、当該逸脱判断フラグFLDがセットされているときには、車両諸元から決まる比例係数K1 と、図3に示す車両走行速度Vに応じて設定される比例係数K2 と、前記ステップS7で算出された将来の推定横変位XSと、前記横変位限界値XC とを用いて、下記3式に従って目標ヨーモーメントMS を算出する。
【0026】
MS =−K1 ×K2 ×(XS−XC ) ……… (3)
なお、前記逸脱判断フラグFLDがリセット状態にあるときには目標ヨーモーメントMS は“0”とする。
次にステップS16に移行して、各車輪への目標制動流体圧PSi及び駆動輪の目標駆動力を算出する。具体的には、前記ステップS1で読込んだマスタシリンダ圧Pm に対し、前後制動力配分に基づく後輪用マスタシリンダ圧をPmRとしたとき、前記逸脱判断フラグFLDがリセット状態にあるときには、前左右輪5FL、5FRのホイールシリンダ6FL、6FRへの目標制動流体圧PSFL 、PSFR は共にマスタシリンダ圧Pm となり、後左右輪5RL、5RRのホイールシリンダ6RL、6RRへの目標制動流体圧PSRL 、PSRR は共に後輪用マスタシリンダ圧PmRとなる。
【0027】
一方、前記逸脱判断フラグFLDがセットされているときでも、前記ステップS10で算出された目標ヨーモーメントMS の大きさに応じて場合分けを行う。即ち、前記目標ヨーモーメントの絶対値|MS |が所定値MS0未満であるときには後左右輪の制動力にだけ差を発生させ、当該目標ヨーモーメントの絶対値|MS |が所定値MS0以上であるときには前後左右輪の制動力に差を発生させる。従って、前記目標ヨーモーメントの絶対値|MS |が所定値MS0未満であるときの前左右輪目標制動流体圧差ΔPSFは“0”であり、後左右輪目標制動流体圧差ΔPSRは下記4式で与えられる。同様に、目標ヨーモーメントの絶対値|MS |が所定値MS0以上であるときの前左右輪目標制動流体圧差ΔPSFは下記5式で、後左右輪目標制動流体圧差ΔPSRは下記6式で与えられる。なお、式中のTはトレッド(前後輪で同じとする)、KbF、KbRは、夫々、制動力を制動流体圧に換算するための換算係数であり、ブレーキ諸元によって決まる。
【0028】
ΔPSR=2×KbR×|MS |/T ……… (4)
ΔPSF=2×KbF×(|MS |ーMS0)/T ……… (5)
ΔPSR=2×KbR×|MS0|/T ……… (6)
従って、前記目標ヨーモーメントMS が負値であるとき、即ち自車両が左方向に車線逸脱しようとしているときの各ホイールシリンダ6FL〜6RRへの目標制動流体圧PSiは下記7式で与えられる。
【0029】
PSFL =Pm
PSFR =Pm +ΔPSF
PSRL =Pm
PSRR =Pm +ΔPSR ……… (7)
これに対し、前記目標ヨーモーメントMS が正値であるとき、即ち自車両が右方向に車線逸脱しようとしているときの各ホイールシリンダ6FL〜6RRへの目標制動流体圧PSiは下記8式で与えられる。
【0030】
PSFL =Pm +ΔPSF
PSFR =Pm
PSRL =Pm +ΔPSR
PSRR =Pm ……… (8)
また、本実施形態では、前記逸脱判断フラグFLDがセットされており、車線逸脱防止制御が行われるときには、アクセル操作が行われていてもエンジンの出力を絞って加速できなくする。従って、逸脱判断フラグFLDがセットされているときの目標駆動トルクTrqDSは、前記ステップS1で読込んだアクセル開度Accに応じた値から、前記前後輪の目標制動流体圧差ΔPSF、ΔPSRの和に応じた値を減じた値とする。つまり、アクセル開度Accに応じた値とは、当該アクセル開度Accに応じて自車両を加速する駆動トルクであり、前後輪の目標制動流体圧差ΔPSF、ΔPSRの和に応じた値とは、目標制動流体圧差ΔPSF、ΔPSRの和によって生じる制動トルクである。従って、逸脱判断フラグFLDがセットされており、車線逸脱防止制御が行われるときには、前記目標制動流体圧差ΔPSF、ΔPSRの和によって生じる制動トルク分だけ、エンジンのトルクが低減されることになる。なお、逸脱判断フラグFLDがリセットされているときの目標駆動トルクTrqDSは、前記アクセル開度Accに応じて自車両を加速する駆動トルク分だけとなる。
【0031】
次にステップS25に移行して、前記ステップS16で算出された各車輪の目標制動流体圧を前記制動流体圧制御回路7に向けて出力すると共に、駆動輪の目標駆動トルクを前記駆動トルクコントロールユニット12に向けて出力してからメインプログラムに復帰する。
この演算処理によれば、運転者の意図的な車線変更でもなく、且つ将来の推定横変位XSが横変位限界値XC 以上となったときに、自車両は走行車線から逸脱する傾向にあると判断されて逸脱判断フラグFLDがセットされ、前記将来の推定横変位XSと横変位限界値XC との差に基づいて目標ヨーモーメントMS を算出し、その目標ヨーモーメントMS が達成されるように各車輪の制動力が制御される。これにより、例えば操舵入力が小さいときには、車両に車線逸脱を防止するヨーモーメントが発生して車線逸脱が防止されると共に、制動力によって車両の走行速度が減速されるため、より安全に車線の逸脱を防止することが可能となる。また、この実施形態では、車線逸脱防止制御が行われている間は、エンジンの出力トルクが低減されて自車両の走行速度が減速されるため、更に安全に車線に逸脱を防止することが可能となる。
【0032】
また、この実施形態では、前述のように走行車線を見失ったときの逸脱防止制御の作動状態に応じて、走行車線検出エリアの設定が行われる。この走行車線検出エリアは、例えば図4に示すように、前記CCDカメラ13で撮像された画像の中から、白線等のレーンマーカを検出して走行車線とするためのものである。具体的に、撮像された画像全域でレーンマーカを検出する(走査する)と、演算負荷も大きいし、時間もかかる。そこで、レーンマーカが存在しそうな領域に、更に小さな検出領域(所謂ウインドウ)を設定し、その検出領域内でレーンマーカを検出する。一般に、車線に対する自車両の向きが変わると、画像内に映し出されるレーンマーカの位置も変わるので、例えば前記特開平11−296660号公報では、操舵角δから車線に対する自車両の向きを推定し、画像内にレーンマーカが映し出されているであろう領域に検出領域を設定する。
【0033】
一方、前記等価操舵角δM は、例えば図5に示すように、操舵入力がなく(前輪が転舵していない)、前記逸脱防止制御による前左輪への制動力によって図示反時計回り、即ち左旋回方向に目標ヨーモーメントMS が発生したとき、前記1式で得られる等価操舵角δM は正値となる(ステアリングホイールを左切りしたことと同じ)。しかしながら、自車両が逸脱傾向から復帰した後は、図4ー▲3▼に示すように、走行車線は右方向、つまり前記等価操舵角δM と逆向きなので、当該等価操舵角δM の負値(逆等価操舵角)、換言すればヨーモーメントに相当する操舵状態量と反対方向への操舵状態量を用い、前記操舵角δのときと同様に走行車線検出エリアを設定すれば、当該等価操舵角δM の負値(逆等価操舵角)分だけ車両の向きが変わった撮像画像に対するように走行車線検出エリアを設定することができる。
【0034】
これに対し、図6aは、前記目標ヨーモーメントMS は発生しているものの、未だ自車両は逸脱傾向にあり、図6bは、前記目標ヨーモーメントMS により、逸脱傾向から復帰した後の状態を示している。同じ車線逸脱防止制御が介入した後でも、つまり目標ヨーモーメントMS が発生した後でも、走行車線をロストした時点で、自車両が未だ逸脱傾向にあるときには、前記等価操舵角δM を用い、逸脱方向のレーンマーカを検出すればよいが、自車両が逸脱傾向から復帰した後は、逸脱方向と逆方向のレーンマーカを検出する必要がある。このときには、前記等価操舵角δM の負値を用いて走行車線検出エリアを設定すれば、当該等価操舵角δM の負値分だけ車両の向きが変わった撮像画像に対するように、つまり逸脱傾向から復帰した後の撮像画像に対するように走行車線検出エリアを設定することができる。
【0035】
このように、走行車線を見失ったときの逸脱防止制御の作動状態、つまり車両挙動制御の状態並びにその結果、車両が未だ逸脱傾向にあったのか、逸脱傾向から復帰した後であったのかに応じて、走行車線検出エリアを設定する、つまり走行車線検出の仕方を設定することにより、より一層、確実にレーンマーカ等により走行車線を検出することが可能となる。
【0036】
以上より、図1の各センサ及びカメラコントローラ14及び図2の演算処理のステップS1及びステップS8が本発明の走行状態検出手段を構成し、以下同様に、図2の演算処理のステップS3乃至ステップS7及びステップS8及びステップS11及びステップS18及びステップS19が走行車線検出手段を構成し、図2の演算処理のステップS14が逸脱判断手段を構成し、図2の演算処理のステップS15、ステップS16、ステップS25及び図1の制動流体圧制御回路7及び駆動トルクコントロールユニット12が車両挙動制御手段を構成し、図2の演算処理のステップS16が制駆動力制御量算出手段を構成し、図2の演算処理のステップS25及び図1の制動流体圧制御回路7及び駆動トルクコントロールユニット12が制駆動力制御手段を構成している。
【0037】
次に、本発明の車線逸脱防止装置の第2実施形態について説明する。この実施形態における車両概略構成は、前記第1実施形態の図1のものと同様である。
本実施形態では、前記制駆動力コントロールユニット8で行われる演算処理が、前記第1実施形態の図2のものから図7のものに変更されている。この図7の演算処理は、前記図2の演算処理に類似しており、同等のステップもある。そこで、同等のステップには同等の符号を附して詳細な説明を省略する。具体的な相違点を列記すると、前記ステップS10とステップS13の間にステップS12が介装され、前記ステップS11とステップS18及びステップS19との間にステップS17が介装され、前記ステップS18とステップS15との間にステップS20が介装され、前記ステップS19とステップS15との間にステップS24が介装されている。
【0038】
前記ステップS12では、後述する走行車線検出時間カウンタCNTをクリアしてから前記ステップS13に移行する。
前記ステップS17では、前記走行車線検出時間カウンタCNTが所定値CNT0 以下であるか否かを判定し、当該走行車線検出時間カウンタCNTが所定値CNT0 以下である場合には前記ステップS18に移行し、そうでない場合には前記ステップS19に移行する。
【0039】
前記ステップS20では、前記走行車線検出時間カウンタCNTをインクリメントしてから前記ステップS15に移行する。
また、前記ステップS24では、前記走行車線検出時間カウンタCNTをクリアしてから前記ステップS15に移行する。
この演算処理によれば、前記第1実施形態の作用に加え、前記等価操舵角δM 又は等価操舵角δM の負値(逆等価操舵角)に基づいて走行車線検出エリアを設定しているときに、前記走行車線検出時間カウンタCNTが所定値CNT0 でカウントアップすると、逸脱防止制御作動フラグFがリセットされると共に走行車線検出時間カウンタCNTがクリアされ、それ以後は操舵角δに基づいて走行車線検出エリアが設定される。つまり、走行車線をロストしたときには、前記車線逸脱防止制御の作動状態に応じて走行車線検出エリアを設定し、そのエリア内でレーンマーカ等で表れる走行車線を検出するのであるが、車線逸脱傾向或いはその復帰状態が、さほど長時間にわたって継続することは少なく、通常は、通常の走行状態に移行している。従って、前記車線逸脱防止制御の作動状態に応じた走行車線検出よりも、通常の走行車線検出に戻したほうが、走行車線を検出できる可能性が高い。そこで、本実施形態では、或る程度、車線逸脱防止制御の作動状態に応じた走行車線検出を継続したら、通常の走行車線検出に切替える。
【0040】
以上より、図1の各センサ及びカメラコントローラ14及び図7の演算処理のステップS1及びステップS8が本発明の走行状態検出手段を構成し、以下同様に、図7の演算処理のステップS3乃至ステップS7及びステップS8及びステップS11及びステップS17乃至ステップS20及びステップS24が走行車線検出手段を構成し、図7の演算処理のステップS14が逸脱判断手段を構成し、図7の演算処理のステップS15、ステップS16、ステップS25及び図1の制動流体圧制御回路7及び駆動トルクコントロールユニット12が車両挙動制御手段を構成し、図7の演算処理のステップS16が制駆動力制御量算出手段を構成し、図7の演算処理のステップS25及び図1の制動流体圧制御回路7及び駆動トルクコントロールユニット12が制駆動力制御手段を構成している。
【0041】
次に、本発明の車線逸脱防止装置の第3実施形態について説明する。この実施形態における車両概略構成は、前記第1実施形態の図1のものと同様である。
本実施形態では、前記制駆動力コントロールユニット8で行われる演算処理が、前記第2実施形態の図7のものから図8のものに変更されている。この図8の演算処理は、前記図7の演算処理に類似しており、同等のステップもある。そこで、同等のステップには同等の符号を附して詳細な説明を省略する。具体的には、ステップS21〜ステップS23が追加されている。そして、前記ステップS20からステップS21に移行し、前記ステップS24からはステップS23に移行する。また、前記ステップS21とステップS16との間にステップS22が介装され、前記ステップS23からはステップS16に移行する。
【0042】
前記ステップS21では、走行車線を見失ったとき(ロストしたとき)、自車両が車線逸脱傾向にあったか否かを判定し、逸脱傾向にあった場合にはステップS22に移行し、そうでない場合にはステップS23に移行する。
前記ステップS22では、前記目標ヨーモーメントMS を保持してから前記ステップS16に移行する。
【0043】
また、前記ステップS23では、目標ヨーモーメントMS (厳密にはその絶対値)を減少、例えば漸減してから前記ステップS16に移行する。
この演算処理によれば、前記第2実施形態の作用に加え、走行車線を見失ったときに自車両が逸脱傾向にあったときには、それ以前に算出された目標ヨーモーメントMS を保持することにより、逸脱防止制御を継続する。また、走行車線を見失ったときに自車両が逸脱傾向から復帰していたら、それ以前の目標ヨーモーメントMS を漸減することにより、次第に逸脱防止制御を終了する。これにより、走行車線を見失ったときでも車線逸脱制御を或る程度正確に継続し、或いは終了することができる。
【0044】
以上より、図1の各センサ及びカメラコントローラ14及び図8の演算処理のステップS1及びステップS8が本発明の走行状態検出手段を構成し、以下同様に、図8の演算処理のステップS3乃至ステップS7及びステップS8及びステップS11及びステップS17乃至ステップS20及びステップS24が走行車線検出手段を構成し、図8の演算処理のステップS14が逸脱判断手段を構成し、図8の演算処理のステップS15、ステップS16、ステップS22、ステップS23、ステップS25及び図1の制動流体圧制御回路7及び駆動トルクコントロールユニット12が車両挙動制御手段を構成し、図8の演算処理のステップS16が制駆動力制御量算出手段を構成し、図8の演算処理のステップS25及び図1の制動流体圧制御回路7及び駆動トルクコントロールユニット12が制駆動力制御手段を構成している。
なお、前記実施形態では、車線逸脱判断の閾値となる横変位限界値XC を車幅と走行車線幅とから算出したが、例えば日本国内の高速道路の走行車線幅は3.35mと決まっていることから、例えばこれを0.8mと固定してもよい。
【図面の簡単な説明】
【図1】本発明の車線逸脱防止装置を搭載した車両の一例を示す概略構成図である。
【図2】図1の制駆動力コントロールユニット内で実行される情報演算処理の第1実施形態を示すフローチャートである。
【図3】図2の演算処理に用いられる制御マップである。
【図4】図2の演算処理の作用の説明図である。
【図5】図2の演算処理の作用の説明図である。
【図6】図2の演算処理の作用の説明図である。
【図7】図1の制駆動力コントロールユニット内で実行される情報演算処理の第2実施形態を示すフローチャートである。
【図8】図1の制駆動力コントロールユニット内で実行される情報演算処理の第3実施形態を示すフローチャートである。
【符号の説明】
6FL〜6RRはホイールシリンダ
7は制動流体圧制御回路
8は制駆動力コントロールユニット
9はエンジン
12は駆動トルクコントロールユニット
13はCCDカメラ
14はカメラコントローラ
15は加速度センサ
16はヨーレートセンサ
17はマスタシリンダ圧センサ
18はアクセル開度センサ
19は操舵角センサ
20は方向指示スイッチ
22FL〜22RRは車輪速度センサ
Claims (7)
- 自車両の走行車線を検出する走行車線検出手段と、自車両の走行状態を検出する走行状態検出手段と、前記走行車線検出手段で検出された走行車線及び走行状態検出手段で検出された走行状態から自車両が走行車線から逸脱傾向にあることを検出する逸脱判断手段と、前記逸脱判断手段で自車両が走行車線から逸脱傾向にあることが検出されたときに、前記走行状態検出手段で検出された走行状態に応じて、自車両の走行車線からの逸脱を回避する方向にヨーモーメントが発生するように車両の挙動を制御する車両挙動制御手段とを備え、前記走行車線検出手段は、自車両の走行車線を検出できなくなったとき、当該走行車線を検出できなくなったときの前記車両挙動制御手段の車両挙動制御状態に応じて自車両の走行車線を検出することを特徴とする車線逸脱防止装置。
- 前記走行車線検出手段は、自車両の走行車線を検出できなくなってから所定時間経過後、前記自車両の走行車線を検出できなくなったときの前記車両挙動制御手段の車両挙動制御状態に応じた自車両の走行車線検出を解除することを特徴とする請求項1に記載の車線逸脱防止装置。
- 前記走行車線検出手段は、前記自車両の走行車線を検出できなくなったときに、自車両が走行車線から逸脱傾向にあるとき、前記車両挙動制御手段によるヨーモーメントと等価な操舵状態量に基づいて自車両の走行車線を検出することを特徴とする請求項1又は2に記載の車線逸脱防止装置。
- 前記走行車線検出手段は、前記自車両の走行車線を検出できなくなったときに、自車両が走行車線から逸脱傾向から復帰しているとき、前記車両挙動制御手段によるヨーモーメントと等価な操舵状態量の反対方向への操舵状態量を算出し、その反対方向への操舵状態量に基づいて自車両の走行車線を検出することを特徴とする請求項1又は2に記載の車線逸脱防止装置。
- 前記車両挙動制御手段は、前記走行車線検出手段が自車両の走行車線を検出できなくなったときに、自車両が走行車線から逸脱傾向にあるとき、当該走行車線を検出できなくなったときのヨーモーメントを保持することを特徴とする請求項1乃至3の何れかに記載の車線逸脱防止装置。
- 前記車両挙動制御手段は、前記走行車線検出手段が自車両の走行車線を検出できなくなったときに、自車両が走行車線から逸脱傾向から復帰しているとき、当該走行車線を検出できなくなったときのヨーモーメントを減少することを特徴とする請求項1及び2及び4の何れかに記載の車線逸脱防止装置。
- 前記車両挙動制御手段は、前記自車両の走行車線からの逸脱を回避する方向にヨーモーメントが発生するように各車輪の制駆動力制御量を算出する制駆動力制御量算出手段と、前記制駆動力制御量算出手段で算出された制駆動力制御量に応じて各車輪の制駆動力を制御する制駆動力制御手段とを備えたことを特徴とする請求項1乃至6の何れかに記載の車線逸脱防止装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002346377A JP3864893B2 (ja) | 2002-11-28 | 2002-11-28 | 車線逸脱防止装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002346377A JP3864893B2 (ja) | 2002-11-28 | 2002-11-28 | 車線逸脱防止装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2004178441A true JP2004178441A (ja) | 2004-06-24 |
| JP3864893B2 JP3864893B2 (ja) | 2007-01-10 |
Family
ID=32707305
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002346377A Expired - Lifetime JP3864893B2 (ja) | 2002-11-28 | 2002-11-28 | 車線逸脱防止装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3864893B2 (ja) |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06340262A (ja) * | 1993-05-31 | 1994-12-13 | Mitsubishi Motors Corp | 操舵補助装置付き車両 |
| JPH0719882A (ja) * | 1993-06-30 | 1995-01-20 | Mazda Motor Corp | 車両の走行域認識装置及びそれを備えた自動車の安全装置 |
| JPH10203395A (ja) * | 1997-01-23 | 1998-08-04 | Toyota Motor Corp | 車両の操舵制御装置 |
| JPH11180328A (ja) * | 1997-12-18 | 1999-07-06 | Mitsubishi Motors Corp | 車線逸脱防止装置 |
| JPH11296660A (ja) * | 1998-04-15 | 1999-10-29 | Nissan Motor Co Ltd | 道路白線検出装置 |
| JP2001266163A (ja) * | 2000-03-17 | 2001-09-28 | Nissan Motor Co Ltd | 車両用画像処理装置 |
| JP2001310719A (ja) * | 2000-04-27 | 2001-11-06 | Nissan Motor Co Ltd | 車線逸脱防止装置 |
-
2002
- 2002-11-28 JP JP2002346377A patent/JP3864893B2/ja not_active Expired - Lifetime
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06340262A (ja) * | 1993-05-31 | 1994-12-13 | Mitsubishi Motors Corp | 操舵補助装置付き車両 |
| JPH0719882A (ja) * | 1993-06-30 | 1995-01-20 | Mazda Motor Corp | 車両の走行域認識装置及びそれを備えた自動車の安全装置 |
| JPH10203395A (ja) * | 1997-01-23 | 1998-08-04 | Toyota Motor Corp | 車両の操舵制御装置 |
| JPH11180328A (ja) * | 1997-12-18 | 1999-07-06 | Mitsubishi Motors Corp | 車線逸脱防止装置 |
| JPH11296660A (ja) * | 1998-04-15 | 1999-10-29 | Nissan Motor Co Ltd | 道路白線検出装置 |
| JP2001266163A (ja) * | 2000-03-17 | 2001-09-28 | Nissan Motor Co Ltd | 車両用画像処理装置 |
| JP2001310719A (ja) * | 2000-04-27 | 2001-11-06 | Nissan Motor Co Ltd | 車線逸脱防止装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP3864893B2 (ja) | 2007-01-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3760827B2 (ja) | 車線逸脱防止装置 | |
| JP3661684B2 (ja) | 車線逸脱防止装置 | |
| JP3873919B2 (ja) | 車線逸脱防止装置 | |
| JP3606276B2 (ja) | 車線逸脱防止装置 | |
| JP3736413B2 (ja) | 車線逸脱防止装置 | |
| JP3900099B2 (ja) | 車線逸脱防止装置 | |
| JP4534754B2 (ja) | 車線逸脱防止装置 | |
| JP2004322787A (ja) | 車線逸脱防止装置 | |
| JP2004231131A (ja) | 車両挙動制御装置 | |
| JP2004330995A (ja) | 車線逸脱防止装置 | |
| JP4678121B2 (ja) | 車線逸脱防止装置 | |
| JP4124050B2 (ja) | 車線逸脱防止装置 | |
| JP3864892B2 (ja) | 車線逸脱防止装置 | |
| JP2006137416A (ja) | 車線逸脱防止装置 | |
| JP2006175979A (ja) | 車線逸脱防止装置 | |
| JP4735147B2 (ja) | 車線逸脱防止装置 | |
| JP4079028B2 (ja) | 車線逸脱防止装置 | |
| JP4466365B2 (ja) | 車線逸脱防止装置 | |
| JP3918722B2 (ja) | 車線逸脱防止装置 | |
| JP3979393B2 (ja) | 車線逸脱防止装置 | |
| JP3891102B2 (ja) | 車線逸脱防止装置 | |
| JP2004178158A (ja) | 車線逸脱防止装置 | |
| JP3864893B2 (ja) | 車線逸脱防止装置 | |
| JP2008290717A (ja) | 車線逸脱防止装置 | |
| JP3941677B2 (ja) | 車線逸脱防止装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20041126 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20060828 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20060912 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20060925 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 3864893 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20091013 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101013 Year of fee payment: 4 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111013 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121013 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121013 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131013 Year of fee payment: 7 |
|
| EXPY | Cancellation because of completion of term |