JP2004206267A - 物標検出装置、及び物標検出方法 - Google Patents
物標検出装置、及び物標検出方法 Download PDFInfo
- Publication number
- JP2004206267A JP2004206267A JP2002372482A JP2002372482A JP2004206267A JP 2004206267 A JP2004206267 A JP 2004206267A JP 2002372482 A JP2002372482 A JP 2002372482A JP 2002372482 A JP2002372482 A JP 2002372482A JP 2004206267 A JP2004206267 A JP 2004206267A
- Authority
- JP
- Japan
- Prior art keywords
- target
- curve
- radius
- vehicle
- current position
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






Landscapes
- Controls For Constant Speed Travelling (AREA)
- Traffic Control Systems (AREA)
Abstract
【解決手段】物標Tの少なくとも位置を検出する位置検出装置から得られる物標Tの過去位置に基づいて、物標Tの現在位置を推定する手段を備えた、車両に搭載される物標検出装置において、物標Tのロストが生じた場合に、走行中のカーブ半径Rに基づいて、物標Tの現在位置を推定する手段を装備する。
【選択図】 図2
Description
【発明の属する技術分野】
本発明は物標検出装置、及び物標検出方法に関し、より詳細には、車両などに搭載され、該車両を基準とする先行車両や対向車両などの物標を好適に追尾するための物標検出装置、及び物標検出方法に関する。
【0002】
【従来の技術】
運転支援システムの一つとして、レーダ(例えば、ミリ波レーダ)を用いた車間距離制御システムなどがある。車間距離制御システムには、レーザーパルスを前方に発射し、先行車両のリフレクタ(車両の尾灯にある反射板)で反射されたパルスを受光して、発射から受光までの時間差から先行車両との車間距離や相対速度などを測定するものがある。従って、車間距離制御システムなどを実現する上で、先行車両などの物標を正確に検出し、追尾(追跡)することは非常に重要となる。
【0003】
ところが、道路の勾配や凹凸、カーブなどによって、自車両と同一の車線上を走行しているにも拘らず、先行車両が一時的に検出されなくなる場合がある(いわゆる、物標のロスト)。このようなロストが生じた場合には、前記先行車両の過去位置(過去に検出された時の位置)から、現在位置を推定することによって、前記先行車両を追尾することができる。
【0004】
例えば、下記の特許文献1には、物標Aが検出されなくなった場合、過去に検出された時の物標Aの位置(過去位置)と、検出された時の自車両との相対速度とに基づいて、物標Aの現在位置を推定することが記載されている。図A、図Bに示した説明図を使って、従来の物標の現在位置の推定方法について簡単に説明する。
【0005】
図5(a)は、自車両M1、先行車両T1それぞれの過去位置を示した図であり、図5(b)は、自車両M1、先行車両T1それぞれの現在位置を示した図である。図5(a)、図5(b)に示したように、自車両M1は矢印の方向に速度VM1で走行中であり、先行車両T1は矢印の方向に速度VT1(<VM1)で走行中である。従って、自車両M1に対する先行車両T1の相対速度ΔVMTは(VM1−VT1)となる。換言すれば、相対速度ΔVMTで自車両M1が先行車両T1に近づいていることになる。
【0006】
図6(a)は、自車両M1に搭載されたレーダによって検出された先行車両T1の過去位置(過去の時点における、自車両M1に対する先行車両T1の相対位置)を示した図であり、先行車両T1が前記レーダによる検出エリアE1内に存在している。図6(b)は、前記レーダによって先行車両T1の現在位置が検出されなかった状態を示した図である。すなわち、物標のロストが生じた状態を示している。
【0007】
このようなロストが生じた場合に、先行車両T1の過去位置と、自車両M1に対する先行車両T1の相対速度ΔVMT(=VM1−VT1)とに基づいて、先行車両T1の現在位置を推定すると、先行車両T1の推定位置は、過去位置から{相対速度ΔVMT×(現在時刻−過去位置が検出された時刻)}により求められる距離だけ自車両M1に近づけた位置となる。図6(c)に、先行車両T1の推定位置(現在における、自車両M1に対する先行車両T1の相対位置)を示す。
【0008】
【特許文献1】
特開平11−39600号公報(段落番号「0036」)
【0009】
【発明が解決しようとする課題】
上記したように、ロストが生じた場合にも、従来の推定方法によって、先行車両の現在位置を推定することができるが、正確に推定できるのは直線路を走行中の場合であって、カーブなどを走行中の場合には、上記した従来の推定方法では正確に推定することができないことがある。
【0010】
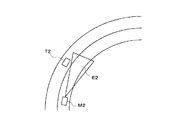
例えば、図7に示したように、先行車両T2が自車両M2とは別の車線上を走行していたとしても、カーブであるために、先行車両T2が追尾対象となる物標として検出されてしまう場合。すなわち、自車両M2の検出エリアE2内に先行車両T2が入ってしまう場合がある。図7は、先行車両T2が検出エリアE2から外れている状態を示している。
【0011】
もし仮に、先行車両T2が追尾対象となる物標として一旦検出され(すなわち、先行車両T2が検出エリアE2内に一旦入り)、その後、先行車両T2が検出エリアE2から外れると、物標のロストが生じたこととなる。そして、このようなロストが生じたときに、従来の現在位置の推定方法を採用すると、先行車両T2が自車両M2と同一の車線上を走行しているといった誤った推定がなされる場合がある。
【0012】
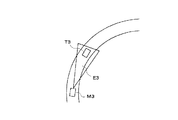
また、図8は自車両M3、先行車両T3それぞれが急なカーブ(カーブ半径が小さい)を走行している状態を示しているが、この場合には、それまで検出エリアE3内に存在し、追尾の対象となっていた先行車両T3が、検出エリアE3から外れる可能性が高い。これは、急なカーブを走行しているからである。
【0013】
もし仮に、先行車両T3が検出エリアE3から外れると、やはり物標のロストが生じたこととなる。このようなロストが生じたときに、従来の現在位置の推定方法を採用すると、先行車両T3が検出エリアE3内に存在するように推定されてしまう場合がある。先行車両T3が検出エリアE3内に存在するように推定されると、実際よりも先行車両T3が自車両M3に近い位置に存在することになってしまう。
【0014】
本発明は上記課題に鑑みなされたものであって、自車両を基準とする先行車両や対向車両などの物標を誤対応なく正確に追尾することのできる物標検出装置、及び物標検出方法を提供することを目的としている。
【0015】
【課題を解決するための手段及びその効果】
上記目的を達成するために本発明に係る物標検出装置(1)は、物標のロストが生じた場合、前記物標の少なくとも位置を検出する位置検出手段から得られた前記物標の過去位置に基づいて、前記物標の現在位置を推定する現在位置推定手段を備えた、車両に搭載される物標検出装置において、前記現在位置推定手段が、走行中のカーブ半径に基づいて、前記物標の現在位置を推定するものであることを特徴としている。
【0016】
上記物標検出装置(1)によれば、走行中のカーブ半径に基づいて、前記物標の現在位置が推定される。従って、前記物標のロストが生じた場合であったとしても、前記物標が検出されていたときの位置(過去位置)と、走行中のカーブ半径とに基づいて、前記物標の現在位置を推定することができるので、直線路でなく、カーブの走行中の場合にも、前記物標を正確に追尾することができる。
また、過去位置や、走行中のカーブ半径だけでなく、前記物標が検出されていたときの自車両との車間距離や、前記自車両に対する相対速度を考慮に入れて、前記物標の現在位置を推定すれば、推定精度をさらに向上させることができる。
【0017】
また、本発明に係る物標検出装置(2)は、上記物標検出装置(1)において、走行中のカーブ半径が所定値α以下であるか否かを判断する第1の判断手段を備え、該第1の判断手段により、走行中のカーブ半径が所定値α以下でないと判断された場合、前記現在位置推定手段が、走行中のカーブ半径を考慮に入れずに、前記物標の現在位置を推定するものであることを特徴としている。
【0018】
ところで、カーブ半径が大きく、直線路を走行している場合とほとんど変わらないようなカーブを走行している場合や、実際にカーブではなく直線路を走行している場合には、カーブ半径を考慮に入れて、前記物標の現在位置を推定する必要はない。
【0019】
上記物標検出装置(2)によれば、走行中のカーブ半径が所定値α以下であるか否かが判断され、カーブ半径が所定値α以下でない(すなわち、直線路を走行している、又はそれに相当する)と判断された場合、カーブ半径を考慮に入れずに、前記物標の現在位置が推定される。
従って、走行中のカーブ半径が所定値α以下の場合に限り、カーブ半径を考慮に入れて、前記物標の現在位置が推定されるので、無駄な演算処理を省くことができる。
【0020】
また、本発明に係る物標検出装置(3)は、上記物標検出装置(1)又は(2)において、第1の所定情報に基づいて、走行中のカーブ半径を求めるカーブ半径算出手段を備え、前記物標の現在位置の推定に、前記カーブ半径算出手段により算出された走行中のカーブ半径が使用されることを特徴としている。
【0021】
走行中のカーブ半径に関する情報を提供するサービス機関が設定されていれば、該サービス機関から提供される情報を利用することができ、また、ナビゲーション装置で用いられる地図情報に、各道路のカーブ半径に関する情報が付加されていれば、その情報を利用することができる。
【0022】
しかしながら、前記サービス機関から提供される情報を利用するには、前記サービス機関が設定されていることが大前提となり、また前記地図情報に付加されているカーブ半径に関する情報を利用するには、前記地図情報にカーブ半径に関する情報が付加されていることが大前提となる。
【0023】
上記物標検出装置(3)によれば、前記第1の所定情報に基づいて、走行中のカーブ半径が求められ、前記物標の現在位置の推定に、この求められたカーブ半径が使用される。従って、上記したように、前記サービス機関が設定されていたり、前記地図情報にカーブ半径に関する情報が付加されていなくても、カーブ半径に基づいて、前記物標の現在位置を推定することができる。
なお、前記第1の所定情報としては、例えば、ステアリングセンサから得られる操舵角情報や、ヨーレートセンサから得られる車両の回転角情報、速度センサから得られる速度情報などが挙げられる。
【0024】
また、本発明に係る物標検出装置(4)は、上記物標検出装置(1)〜(3)のいずれかにおいて、前記車両の速度情報に基づいて、走行中のカーブ半径を考慮に入れて、前記物標の現在位置を推定すべきか否かを判断する第2の判断手段を備え、該第2の判断手段により、走行中のカーブ半径を考慮に入れて、前記物標の現在位置を推定すべきでないと判断された場合、前記現在位置推定手段が、走行中のカーブ半径を考慮に入れずに、前記物標の現在位置を推定するものであることを特徴としている。
【0025】
ところで、走行中のカーブ半径は、操舵角などから求めることができるが、その求められた結果の信用度については、車両の速度と大きく関係しており、速度が遅い場合、その信用度は低くなってしまう。また、自車両を基準とする先行車両などの物標の現在位置の推定に、走行中のカーブ半径を考慮に入れるのは、前記自車両が実際にカーブを走行しているからである。従って、前記自車両がカーブを走行していない場合に、前記物標の現在位置の推定に、走行中のカーブ半径を考慮に入れるのは好ましくない。
【0026】
例えば、車庫入れの場合、走行中のカーブ半径は小さくなるので、カーブ半径だけから見れば、前記車両はカーブを走行していることとなる。しかしながら、前記車両は車庫入れの状態にあり、カーブ走行中ではない。従って、このような状態にあるときに、カーブ半径を考慮に入れて、現在位置の推定が行われると、誤った推定がなされる虞がある。
【0027】
上記物標検出装置(4)によれば、前記車両の速度情報に基づいて、走行中のカーブ半径を考慮に入れて、前記物標の現在位置を推定すべきか否かが判断され、前記推定にカーブ半径を考慮に入れるべきでないと判断された場合、走行中のカーブ半径を考慮に入れずに、前記物標の現在位置の推定が行われる。従って、カーブ半径に関する情報の信用度が低い場合に(例えば、車庫入れなど、カーブを走行していないときに)、カーブ半径を考慮に入れて、前記物標の現在位置の推定が行われるのを防止することができる。
【0028】
また、本発明に係る物標検出装置(5)は、物標のロストが生じた場合、前記物標の少なくとも位置を検出する位置検出手段から得られた前記物標の過去位置に基づいて、前記物標の現在位置を推定する現在位置推定手段を備えた、車両に搭載される物標検出装置において、走行中のカーブ半径が所定値β以下であるか否かを判断する第3の判断手段と、前記物標のロストが生じているときに、前記第3の判断手段により、走行中のカーブ半径が所定値β以下であると判断された場合、所定の処理を行う処理手段とを備え、前記所定の処理に、前記物標の現在位置の推定を禁止することが含まれていることを特徴としている。
【0029】
ところで、「発明が解決しようとする課題」の項目で説明したように、急なカーブを走行している状態で、物標のロストが生じ、その物標に対して現在位置の推定が行われると、誤った推定がなされる可能性が高い。
【0030】
上記物標検出装置(5)によれば、前記物標のロストが生じているときに、走行中のカーブ半径が所定値β以下である(すなわち、急なカーブを走行中である)と判断された場合、前記所定の処理が行われる。また、該所定の処理に、前記物標の現在位置の推定を禁止することが含まれているので、上記した急なカーブ走行中における誤った推定がなされるのを防止することができる。
【0031】
また、本発明に係る物標検出装置(6)は、上記物標検出装置(5)において、第1の所定情報に基づいて、走行中のカーブ半径を求めるカーブ半径算出手段を備え、前記第3の判断手段が、前記カーブ半径算出手段により算出された走行中のカーブ半径が所定値β以下であるか否かを判断するものであることを特徴としている。
【0032】
上記物標検出装置(6)によれば、前記第1の所定情報に基づいて、走行中のカーブ半径が求められ、前記第3の判断手段による判断に、この求められたカーブ半径が使用される。従って、上記したように、前記サービス機関が設定されていたり、前記地図情報にカーブ半径に関する情報が付加されていなくても、前記判断を行うことができる。
なお、前記第1の所定情報としては、例えば、ステアリングセンサから得られる操舵角情報や、ヨーレートセンサから得られる車両の回転角情報、速度センサから得られる速度情報などが挙げられる。
【0033】
また、本発明に係る物標検出装置(7)は、上記物標検出装置(5)又は(6)において、前記車両の速度情報に基づいて、前記所定の処理を行うべきか否かを判断する第4の判断手段を備え、該第4の判断手段により、前記所定の処理を行うべきでないと判断された場合、前記処理手段が前記所定の処理を行わないものであることを特徴としている。
【0034】
ところで、上記したように、走行中のカーブ半径は、操舵角などから求めることができるが、その求められた結果の信用度については、車両の速度と大きく関係しており、速度が遅い場合、その信用度は低くなってしまう。また、前記所定の処理を行う必要があるのは、急なカーブの走行中に、物標のロストが生じた場合である。従って、カーブを走行していない場合に、前記所定の処理を行うのは好ましくない。
【0035】
例えば、車庫入れの場合、走行中のカーブ半径は小さくなるので、カーブ半径だけから見れば、前記車両はカーブを走行していることとなる。しかしながら、前記車両は車庫入れの状態にあり、カーブ走行中ではない。従って、このような状態にあるときに、前記所定の処理を行うのは好ましくない。
【0036】
上記物標検出装置(7)によれば、前記車両の速度情報に基づいて、前記所定の処理を行うべきか否かが判断され、前記所定の処理を行うべきでないと判断された場合、前記所定の処理が禁止される。従って、カーブ半径に関する情報の信用度が低い場合に(例えば、車庫入れなど、カーブを走行していないときに)、前記所定の処理が行われるのを防止することができる。
【0037】
また、本発明に係る物標検出方法(1)は、物標のロストが生じた場合、前記物標の過去位置から、前記物標の現在位置を推定することによって、前記物標を追尾する物標検出方法において、走行中のカーブ半径が所定値α以下である場合、走行中のカーブ半径に基づいて、前記物標の現在位置を推定することを特徴としている。
【0038】
上記物標検出方法(1)によれば、走行中のカーブ半径が所定値α以下である(すなわち、直線路を走行しているのではなく、カーブを走行している)と判断した場合、走行中のカーブ半径に基づいて、前記物標の現在位置を推定する。従って、カーブ走行中に、前記物標のロストが生じた場合であったとしても、前記物標が検出されていたときの位置(過去位置)と、走行中のカーブ半径とに基づいて、前記物標の現在位置を推定することができるので、前記物標を正確に追尾することができる。
また、過去位置や、走行中のカーブ半径だけでなく、前記物標が検出されていたときの自車両との車間距離や、前記自車両に対する相対速度を考慮に入れて、前記物標の現在位置を推定すれば、推定精度をさらに向上させることができる。
【0039】
また、本発明に係る物標検出方法(2)は、上記物標検出方法(1)において、自車両の速度が所定の速度以下である場合、走行中のカーブ半径を考慮に入れずに、前記物標の現在位置を推定することを特徴としている。
【0040】
上記物標検出方法(2)によれば、自車両の速度が遅い場合、走行中のカーブ半径を考慮に入れずに、前記物標の現在位置の推定を行う。従って、カーブ半径に関する情報の信用度が低い場合に(例えば、車庫入れなど、カーブを走行していないときに)、カーブ半径を考慮に入れて、前記物標の現在位置の推定を行うのを防止することができる。
【0041】
また、本発明に係る物標検出方法(3)は、物標のロストが生じた場合、前記物標の過去位置から、前記物標の現在位置を推定することによって、前記物標を追尾する物標検出方法において、前記物標のロストが生じているときに、走行中のカーブ半径が所定値β以下である場合、少なくとも前記物標の現在位置の推定を禁止することを特徴としている。
【0042】
上記物標検出方法(3)によれば、前記物標のロストが生じているときに、走行中のカーブ半径が所定値β以下である(すなわち、急なカーブを走行中である)場合、少なくとも前記物標の現在位置の推定を禁止するので、急なカーブ走行中における誤った推定がなされるのを防止することができる。
【0043】
また、本発明に係る物標検出方法(4)は、上記物標検出方法(3)において、自車両の速度が所定の速度以下である場合、少なくとも前記物標の現在位置の推定を禁止しないことを特徴としている。
【0044】
上記物標検出方法(4)によれば、自車両の速度が遅い場合、少なくとも前記物標の現在位置の推定を許可する。従って、カーブ半径に関する情報の信用度が低い場合に(例えば、車庫入れなど、カーブを走行していないときに)、急カーブを走行中であるといった誤った判断をして、前記物標の現在位置の推定が禁止されるのを防止することができる。
【0045】
【発明の実施の形態】
以下、本発明に係る物標検出装置、及び物標検出方法の実施の形態を図面に基づいて説明する。
【0046】
図1は、実施の形態(1)に係る物標検出装置の要部を概略的に示したブロック図である。図中1はマイコンを示しており、マイコン1には自車両に対して相対的に移動する物標の位置(3次元位置、又は2次元位置)を一定時間毎に検出する位置検出装置2と、操舵角情報を検出するステアリングセンサ3と、回転角情報を検出するヨーレートセンサ4と、車速情報を検出する車速センサ5とが接続されている。なお、位置検出装置2としては、レーザーレーダやミリ波レーダ、又は複数のCCDカメラを利用したステレオカメラなどを採用することができる。
【0047】
マイコン1は、各種演算処理するためのCPUや、位置検出装置2から得られる位置情報を受け取るためのRAMや、制御プログラム等が記憶されたROMや、CPUによる演算結果などを記憶するためのRAMなどを含んで構成されている。また、マイコン1は、位置検出装置2の駆動を制御することができるようになっており、例えば、位置検出装置2がミリ波レーダである場合には、マイコン1によって、レーダのビームを振るためのビームステアモータの駆動が制御される。
【0048】
次に、実施の形態(1)に係る物標検出装置におけるマイコン1の行う処理動作▲1▼を図2に示したフローチャートに基づいて説明する。まず、位置検出装置2によって追尾対象となる物標T(先行車両など)を捕らえているか否かを判断する(ステップS1)。
【0049】
追尾対象となる物標を捕らえていると判断すれば、位置検出装置2から得られた情報に基づいて、物標Tの位置情報を検出した時刻や、物標Tの位置情報をRAMに記憶させたり、自車両Mに対する物標Tの相対速度ΔVMTや、自車両Mとの車間距離などを求めて、それら情報をRAMに記憶させたりする(ステップS2)。
【0050】
一方、追尾対象となる物標を捕らえていないと判断すれば、次に、物標Tのロストが生じたか否かを判断し(ステップS3)、物標Tのロストが生じたと判断すれば、次に、ステアリングセンサ3から得られる操舵角情報と、ヨーレートセンサ4から得られる回転角情報とに基づいて、カーブ半径(曲率半径)Rを求める(ステップS4)。他方、物標Tのロストが生じていないと判断すれば、そのまま処理動作▲1▼を終了する。
【0051】
次に、カーブ半径Rが所定値α(例えば、4000m)以下であるか否かを判断し(ステップS5)、カーブ半径Rが所定値α以下である(すなわち、自車両Mがカーブを走行している)と判断すれば、次に、車速センサ5から得られる車速情報に基づいて、自車両Mの速度Vが所定の速度V’(例えば、30km/h)以下であるか否かを判断することによって、カーブ半径Rの情報の信用度を検討する(ステップS6)。
【0052】
自車両Mの速度Vが所定の速度V’以下でない(すなわち、カーブ半径Rの情報の信用度は高い)と判断すれば、物標Tの過去位置と、自車両Mとの相対速度ΔVMTと、自車両Mとの車間距離と、カーブ半径Rとに基づいて、物標Tの現在位置を推定する(ステップS7)。
【0053】
一方、自車両Mの速度Vが所定の速度V’以下である(すなわち、カーブ半径Rの情報の信用度は低い)と判断すれば、カーブ半径Rを考慮せず、物標Tの過去位置と、自車両Mとの相対速度ΔVMTと、自車両Mとの車間距離とに基づいて、物標Tの現在位置を推定する(ステップS8)。
【0054】
また、ステップS5において、カーブ半径Rが所定値α以下でない(すなわち、自車両Mがカーブを走行していない)と判断した場合にも、ステップS8へ進んで、カーブ半径Rを考慮せず、物標Tの過去位置と、自車両Mとの相対速度ΔVMTと、自車両Mとの車間距離とに基づいて、物標Tの現在位置を推定する。
【0055】
上記実施の形態(1)に係る物標検出装置によれば、走行中のカーブ半径Rが所定値α以下である場合(すなわち、カーブを走行している場合)、走行中のカーブ半径Rに基づいて、物標Tの現在位置が推定される。従って、カーブの走行中に、物標Tのロストが生じたとしても、物標Tの現在位置を正確に推定することができる。
【0056】
次に、実施の形態(2)に係る物標検出装置について説明する。但し、実施の形態(2)に係る物標検出装置の構成については、マイコン1を除いて、図1に示した物標検出装置の構成と同様であるため、マイコンには異なる符号を付し、その他の構成部分については、ここではその説明を省略する。
【0057】
実施の形態(2)に係る物標検出装置におけるマイコン1Aの行う処理動作▲2▼を図3に示したフローチャートに基づいて説明する。まず、位置検出装置2によって追尾対象となる物標T(先行車両など)を捕らえているか否かを判断する(ステップS11)。
【0058】
追尾対象となる物標を捕らえていると判断すれば、位置検出装置2から得られた情報に基づいて、物標Tの位置情報を検出した時刻や、物標Tの位置情報をRAMに記憶させたり、自車両Mに対する物標Tの相対速度ΔVMTや、自車両Mとの車間距離などを求めて、それら情報をRAMに記憶させたりする(ステップS12)。
【0059】
一方、追尾対象となる物標を捕らえていないと判断すれば、次に、物標Tのロストが生じたか否かを判断し(ステップS13)、物標Tのロストが生じたと判断すれば、次に、ステアリングセンサ3から得られる操舵角情報と、ヨーレートセンサ4から得られる回転角情報とに基づいて、カーブ半径(曲率半径)Rを求める(ステップS14)。他方、物標Tのロストが生じていないと判断すれば、そのまま処理動作▲2▼を終了する。
【0060】
次に、カーブ半径Rが所定値β(例えば、3000m)以下であるか否かを判断し(ステップS15)、カーブ半径Rが所定値β以下である(すなわち、自車両Mが急なカーブを走行しているときに、物標Tのロストが生じた)と判断すれば、次に、車速センサ5から得られる車速情報に基づいて、自車両Mの速度Vが所定の速度V’(例えば、30km/h)以下であるか否かを判断することによって、カーブ半径Rの情報の信用度を検討する(ステップS16)。
【0061】
ところで、「発明が解決しようとする課題」の項目で説明したように、自車両Mが急なカーブを走行しているときに、物標Tの現在位置の推定を行うと、誤った推定を行う可能性が高いので、物標Tの現在位置の推定を行わない方が良い。
【0062】
そのため、ステップS16において、自車両Mの速度Vが所定の速度V’以下でない(すなわち、カーブ半径Rの情報の信用度は高い)と判断すれば、物標Tの現在位置の推定を行わずに、そのまま処理動作▲2▼を終了する。これにより、物標Tの情報を残らなくすることができる。
【0063】
一方、自車両Mの速度Vが所定の速度V’以下である(すなわち、カーブ半径Rの情報の信用度は低い)と判断すれば、物標Tの過去位置と、自車両Mとの相対速度ΔVMTと、自車両Mとの車間距離とに基づいて、物標Tの現在位置を推定する(ステップS17)。
【0064】
また、ステップS15において、カーブ半径Rが所定値β以下でない(すなわち、自車両Mがカーブを走行していない)と判断した場合にも、ステップS17へ進んで、物標Tの過去位置と、自車両Mとの相対速度ΔVMTと、自車両Mとの車間距離とに基づいて、物標Tの現在位置を推定する。
【0065】
上記実施の形態(2)に係る物標検出装置によれば、走行中のカーブ半径Rが所定値β以下である場合(すなわち、急なカーブを走行している場合)には、物標Tにおける現在位置の誤った推定がなされるのを防止することができる。
【0066】
次に、実施の形態(3)に係る物標検出装置について説明する。但し、実施の形態(3)に係る物標検出装置の構成については、マイコン1を除いて、図1に示した物標検出装置の構成と同様であるため、マイコンには異なる符号を付し、その他の構成部分については、ここではその説明を省略する。
【0067】
実施の形態(3)に係る物標検出装置におけるマイコン1Bの行う処理動作▲3▼を図4に示したフローチャートに基づいて説明する。まず、位置検出装置2によって追尾対象となる物標T(先行車両など)を捕らえているか否かを判断する(ステップS21)。
【0068】
追尾対象となる物標を捕らえていると判断すれば、位置検出装置2から得られた情報に基づいて、物標Tの位置情報を検出した時刻や、物標Tの位置情報をRAMに記憶させたり、自車両Mに対する物標Tの相対速度ΔVMTや、自車両Mとの車間距離などを求めて、それら情報をRAMに記憶させたりする(ステップS22)。
【0069】
一方、追尾対象となる物標を捕らえていないと判断すれば、次に、物標Tのロストが生じたか否かを判断し(ステップS23)、物標Tのロストが生じたと判断すれば、次に、ステアリングセンサ3から得られる操舵角情報と、ヨーレートセンサ4から得られる回転角情報とに基づいて、カーブ半径(曲率半径)Rを求める(ステップS24)。他方、物標Tのロストが生じていないと判断すれば、そのまま処理動作▲3▼を終了する。
【0070】
次に、カーブ半径Rが所定値β(例えば、3000m)以下であるか否かを判断し(ステップS25)、カーブ半径Rが所定値β以下である(すなわち、自車両Mが急なカーブを走行しているときに、物標Tのロストが生じた)と判断すれば、次に、車速センサ5から得られる車速情報に基づいて、自車両Mの速度Vが所定の速度V’(例えば、30km/h)以下であるか否かを判断することによって、カーブ半径Rの情報の信用度を検討する(ステップS26)。
【0071】
ところで、「発明が解決しようとする課題」の項目で説明したように、自車両Mが急なカーブを走行しているときに、物標Tの現在位置の推定を行うと、誤った推定を行う可能性が高いので、物標Tの現在位置の推定を行わない方が良い。
【0072】
そのため、ステップS26において、自車両Mの速度Vが所定の速度V’以下でない(すなわち、カーブ半径Rの情報の信用度は高い)と判断すれば、物標Tの現在位置の推定を行わずに、そのまま処理動作▲3▼を終了する。これにより、物標Tの情報を残らなくすることができる。
【0073】
一方、自車両Mの速度Vが所定の速度V’以下である(すなわち、カーブ半径Rの情報の信用度は低い)と判断すれば、物標Tの過去位置と、自車両Mとの相対速度ΔVMTと、自車両Mとの車間距離とに基づいて、物標Tの現在位置を推定する(ステップS27)。
【0074】
また、ステップS25において、カーブ半径Rが所定値β以下でない(すなわち、自車両Mがカーブを走行していない)と判断すれば、次に、カーブ半径Rが所定値α(例えば、4000m)以下であるか否かを判断し(ステップS28)、カーブ半径Rが所定値α以下である(すなわち、自車両Mがカーブを走行している)と判断すれば、次に、車速センサ5から得られる車速情報に基づいて、自車両Mの速度Vが所定の速度V’(例えば、30km/h)以下であるか否かを判断することによって、カーブ半径Rの情報の信用度を検討する(ステップS29)。
【0075】
自車両Mの速度Vが所定の速度V’以下でない(すなわち、カーブ半径Rの情報の信用度は高い)と判断すれば、物標Tの過去位置と、自車両Mとの相対速度ΔVMTと、自車両Mとの車間距離と、カーブ半径Rとに基づいて、物標Tの現在位置を推定する(ステップS30)。
【0076】
一方、自車両Mの速度Vが所定の速度V’以下である(すなわち、カーブ半径Rの情報の信用度は低い)と判断すれば、カーブ半径Rを考慮せず、物標Tの過去位置と、自車両Mとの相対速度ΔVMTと、自車両Mとの車間距離とに基づいて、物標Tの現在位置を推定する(ステップS31)。
【0077】
上記実施の形態(3)に係る物標検出装置によれば、走行中のカーブ半径Rが所定値α以下である場合(すなわち、カーブを走行している場合)、走行中のカーブ半径Rに基づいて、物標Tの現在位置が推定される。従って、カーブの走行中に、物標Tのロストが生じたとしても、物標Tの現在位置を正確に推定することができる。
さらに、走行中のカーブ半径Rが所定値β以下である場合(すなわち、急なカーブを走行している場合)には、物標Tにおける現在位置の誤った推定がなされるのを防止することができる。
【0078】
上記実施の形態(1)〜(3)に係る物標検出装置では、カーブ半径Rをステアリングセンサ3から得られる操舵角情報と、ヨーレートセンサ4から得られる回転角情報とに基づいて、カーブ半径Rが求めているが、カーブ半径Rの算出方法は、これに限定されるものではなく、例えば、車速センサ5から得られる車速情報を考慮に入れて、カーブ半径Rを求めるようにしても良い。
【図面の簡単な説明】
【図1】本発明の実施の形態(1)に係る物標検出装置の要部を概略的に示したブロック図である。
【図2】実施の形態(1)に係る物標検出装置におけるマイコンの行う処理動作を示したフローチャートである。
【図3】実施の形態(2)に係る物標検出装置におけるマイコンの行う処理動作を示したフローチャートである。
【図4】実施の形態(3)に係る物標検出装置におけるマイコンの行う処理動作を示したフローチャートである。
【図5】従来の物標の現在位置の推定方法を説明するための説明図である。
【図6】従来の物標の現在位置の推定方法を説明するための説明図である。
【図7】従来の物標の現在位置の推定方法を説明するための説明図である。
【図8】従来の物標の現在位置の推定方法を説明するための説明図である。
【符号の説明】
1、1A、1B マイコン
2 位置検出装置
3 ステアリングセンサ
4 ヨーレートセンサ
5 車速センサ
Claims (11)
- 物標のロストが生じた場合、前記物標の少なくとも位置を検出する位置検出手段から得られた前記物標の過去位置に基づいて、前記物標の現在位置を推定する現在位置推定手段を備えた、車両に搭載される物標検出装置において、
前記現在位置推定手段が、走行中のカーブ半径に基づいて、前記物標の現在位置を推定するものであることを特徴とする物標検出装置。 - 走行中のカーブ半径が所定値α以下であるか否かを判断する第1の判断手段を備え、
該第1の判断手段により、走行中のカーブ半径が所定値α以下でないと判断された場合、前記現在位置推定手段が、走行中のカーブ半径を考慮に入れずに、前記物標の現在位置を推定するものであることを特徴とする請求項1記載の物標検出装置。 - 第1の所定情報に基づいて、走行中のカーブ半径を求めるカーブ半径算出手段を備え、
前記物標の現在位置の推定に、前記カーブ半径算出手段により算出された走行中のカーブ半径が使用されることを特徴とする請求項1又は請求項2記載の物標検出装置。 - 前記車両の速度情報に基づいて、走行中のカーブ半径を考慮に入れて、前記物標の現在位置を推定すべきか否かを判断する第2の判断手段を備え、
該第2の判断手段により、走行中のカーブ半径を考慮に入れて、前記物標の現在位置を推定すべきでないと判断された場合、前記現在位置推定手段が、走行中のカーブ半径を考慮に入れずに、前記物標の現在位置を推定するものであることを特徴とする請求項1〜3のいずれかの項に記載の物標検出装置。 - 物標のロストが生じた場合、前記物標の少なくとも位置を検出する位置検出手段から得られた前記物標の過去位置に基づいて、前記物標の現在位置を推定する現在位置推定手段を備えた、車両に搭載される物標検出装置において、
走行中のカーブ半径が所定値β以下であるか否かを判断する第3の判断手段と、
前記物標のロストが生じているときに、前記第3の判断手段により、走行中のカーブ半径が所定値β以下であると判断された場合、所定の処理を行う処理手段とを備え、
前記所定の処理に、前記物標の現在位置の推定を禁止することが含まれていることを特徴とする物標検出装置。 - 第1の所定情報に基づいて、走行中のカーブ半径を求めるカーブ半径算出手段を備え、
前記第3の判断手段が、前記カーブ半径算出手段により算出された走行中のカーブ半径が所定値β以下であるか否かを判断するものであることを特徴とする請求項5記載の物標検出装置。 - 前記車両の速度情報に基づいて、前記所定の処理を行うべきか否かを判断する第4の判断手段を備え、
該第4の判断手段により、前記所定の処理を行うべきでないと判断された場合、前記処理手段が前記所定の処理を行わないものであることを特徴とする請求項5又は請求項6記載の物標検出装置。 - 物標のロストが生じた場合、前記物標の過去位置から、前記物標の現在位置を推定することによって、前記物標を追尾する物標検出方法において、
走行中のカーブ半径が所定値α以下である場合、走行中のカーブ半径に基づいて、前記物標の現在位置を推定することを特徴とする物標検出方法。 - 自車両の速度が所定の速度以下である場合、走行中のカーブ半径を考慮に入れずに、前記物標の現在位置を推定することを特徴とする請求項8記載の物標検出方法。
- 物標のロストが生じた場合、前記物標の過去位置から、前記物標の現在位置を推定することによって、前記物標を追尾する物標検出方法において、
前記物標のロストが生じているときに、走行中のカーブ半径が所定値β以下である場合、少なくとも前記物標の現在位置の推定を禁止することを特徴とする物標検出方法。 - 自車両の速度が所定の速度以下である場合、少なくとも前記物標の現在位置の推定を禁止しないことを特徴とする請求項10記載の物標検出方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002372482A JP2004206267A (ja) | 2002-12-24 | 2002-12-24 | 物標検出装置、及び物標検出方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002372482A JP2004206267A (ja) | 2002-12-24 | 2002-12-24 | 物標検出装置、及び物標検出方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2004206267A true JP2004206267A (ja) | 2004-07-22 |
Family
ID=32811076
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002372482A Pending JP2004206267A (ja) | 2002-12-24 | 2002-12-24 | 物標検出装置、及び物標検出方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2004206267A (ja) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7672481B2 (en) | 2004-11-30 | 2010-03-02 | Honda Motor Co., Ltd. | Image information processing system, image information processing method, image information processing program, and automobile |
| JP2010510935A (ja) * | 2006-11-27 | 2010-04-08 | アーデーツエー・オートモテイブ・デイスタンス・コントロール・システムズ・ゲゼルシヤフト・ミツト・ベシユレンクテル・ハフツング | 遠距離灯の自動制御方法 |
| JP2011123535A (ja) * | 2009-12-08 | 2011-06-23 | Toyota Motor Corp | 障害物検出装置 |
| JP2016012192A (ja) * | 2014-06-27 | 2016-01-21 | 本田技研工業株式会社 | 走行制御装置 |
| JP2016080646A (ja) * | 2014-10-22 | 2016-05-16 | 株式会社デンソー | 物体検知装置 |
| JPWO2022034735A1 (ja) * | 2020-08-11 | 2022-02-17 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1068777A (ja) * | 1997-05-08 | 1998-03-10 | Toyota Motor Corp | 車両用先行車検出装置 |
| JPH10338057A (ja) * | 1997-06-10 | 1998-12-22 | Hitachi Ltd | 自動車の自動走行制御装置および車間距離警報装置 |
| JPH1194946A (ja) * | 1997-07-23 | 1999-04-09 | Denso Corp | 車両用障害物認識装置 |
| JP2002040139A (ja) * | 2000-07-28 | 2002-02-06 | Denso Corp | 物体認識方法及び装置、記録媒体 |
| JP2002120596A (ja) * | 2000-10-17 | 2002-04-23 | Honda Motor Co Ltd | オートクルーズ装置 |
| JP2002260198A (ja) * | 2001-03-05 | 2002-09-13 | Natl Inst For Land & Infrastructure Management Mlit | 安全車間保持警報装置 |
-
2002
- 2002-12-24 JP JP2002372482A patent/JP2004206267A/ja active Pending
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1068777A (ja) * | 1997-05-08 | 1998-03-10 | Toyota Motor Corp | 車両用先行車検出装置 |
| JPH10338057A (ja) * | 1997-06-10 | 1998-12-22 | Hitachi Ltd | 自動車の自動走行制御装置および車間距離警報装置 |
| JPH1194946A (ja) * | 1997-07-23 | 1999-04-09 | Denso Corp | 車両用障害物認識装置 |
| JP2002040139A (ja) * | 2000-07-28 | 2002-02-06 | Denso Corp | 物体認識方法及び装置、記録媒体 |
| JP2002120596A (ja) * | 2000-10-17 | 2002-04-23 | Honda Motor Co Ltd | オートクルーズ装置 |
| JP2002260198A (ja) * | 2001-03-05 | 2002-09-13 | Natl Inst For Land & Infrastructure Management Mlit | 安全車間保持警報装置 |
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7672481B2 (en) | 2004-11-30 | 2010-03-02 | Honda Motor Co., Ltd. | Image information processing system, image information processing method, image information processing program, and automobile |
| JP2010510935A (ja) * | 2006-11-27 | 2010-04-08 | アーデーツエー・オートモテイブ・デイスタンス・コントロール・システムズ・ゲゼルシヤフト・ミツト・ベシユレンクテル・ハフツング | 遠距離灯の自動制御方法 |
| JP2011123535A (ja) * | 2009-12-08 | 2011-06-23 | Toyota Motor Corp | 障害物検出装置 |
| JP2016012192A (ja) * | 2014-06-27 | 2016-01-21 | 本田技研工業株式会社 | 走行制御装置 |
| US9751531B2 (en) | 2014-06-27 | 2017-09-05 | Honda Motor Co., Ltd. | Cruise controller |
| JP2016080646A (ja) * | 2014-10-22 | 2016-05-16 | 株式会社デンソー | 物体検知装置 |
| JPWO2022034735A1 (ja) * | 2020-08-11 | 2022-02-17 | ||
| WO2022034735A1 (ja) * | 2020-08-11 | 2022-02-17 | 日立Astemo株式会社 | 位置推定システム |
| JP7402993B2 (ja) | 2020-08-11 | 2023-12-21 | 日立Astemo株式会社 | 位置推定システム |
| JP2024020641A (ja) * | 2020-08-11 | 2024-02-14 | 日立Astemo株式会社 | 位置推定システム |
| JP7675359B2 (ja) | 2020-08-11 | 2025-05-14 | Astemo株式会社 | 位置推定システム |
| US12552368B2 (en) | 2020-08-11 | 2026-02-17 | Hitachi Astemo, Ltd. | Vehicle position estimation system with sensing for object detection and estimation of feature points |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11287524B2 (en) | System and method for fusing surrounding V2V signal and sensing signal of ego vehicle | |
| US11092442B2 (en) | Host vehicle position estimation device | |
| EP3477614B1 (en) | Vehicle control method and vehicle control device | |
| KR102090512B1 (ko) | 자차 위치 추정 장치 | |
| US11300415B2 (en) | Host vehicle position estimation device | |
| JP4371115B2 (ja) | 物体検出装置 | |
| JP6036371B2 (ja) | 車両用運転支援システム及び運転支援方法 | |
| CN110234957B (zh) | 行驶记录的存储方法、行驶轨迹模型的生成方法、自身位置推定方法及行驶记录的存储装置 | |
| EP2960130B1 (en) | Confidence level determination for estimated road geometries | |
| US11920936B2 (en) | Vehicle controller, and method and computer program for controlling vehicle | |
| CN109839636B (zh) | 物体识别装置 | |
| US20150112509A1 (en) | Tracking control apparatus | |
| CN109017776B (zh) | 安装在车辆中的驾驶辅助系统 | |
| US10970870B2 (en) | Object detection apparatus | |
| CN108340915A (zh) | 车辆控制装置 | |
| JP7149060B2 (ja) | 移動物体認識装置 | |
| CN117068197B (zh) | 车辆控制装置、车辆控制方法以及车辆控制用计算机程序 | |
| JP7276112B2 (ja) | 車線変更決定装置 | |
| JP2004206267A (ja) | 物標検出装置、及び物標検出方法 | |
| JP4074550B2 (ja) | 物体認識装置及び認識方法 | |
| US12479438B2 (en) | Vehicle control device and vehicle control system | |
| JP2012137362A (ja) | 走行道路推定装置、方法およびプログラム | |
| US12249160B2 (en) | Object assessment device, storage medium storing computer program for object assessment, and object assessment method | |
| JP2012113431A (ja) | 車両の前方障害物検出装置 | |
| JP7313325B2 (ja) | 自己位置推定装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050524 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20070518 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070529 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070724 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20071004 |