JP2004249821A - 安全運転採点装置、安全運転採点システム、車載装置及び安全運転採点サーバ - Google Patents
安全運転採点装置、安全運転採点システム、車載装置及び安全運転採点サーバ Download PDFInfo
- Publication number
- JP2004249821A JP2004249821A JP2003041852A JP2003041852A JP2004249821A JP 2004249821 A JP2004249821 A JP 2004249821A JP 2003041852 A JP2003041852 A JP 2003041852A JP 2003041852 A JP2003041852 A JP 2003041852A JP 2004249821 A JP2004249821 A JP 2004249821A
- Authority
- JP
- Japan
- Prior art keywords
- reference value
- safe driving
- scoring
- vehicle
- road information
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






Landscapes
- Traffic Control Systems (AREA)
- Navigation (AREA)
- Auxiliary Drives, Propulsion Controls, And Safety Devices (AREA)
Abstract
【解決手段】制御部4は、記憶媒体2にあらかじめ記憶されている道路地図情報に基づいて車両操作の基準値をマップ化し、これを現在の道路状況を示すリアルタイム情報3に基づいて補正し、この補正した基準値と各種センサ5により検出された車両操作情報を比較して安全運転の度合いを採点し、採点結果を表示部6や音声出力部7に出力する。
【選択図】 図1
Description
【発明の属する技術分野】
本発明は、車両の運転者の安全運転の度合いを採点する安全運転採点装置、安全運転採点システム、車載装置及び安全運転採点サーバに関する。
【0002】
【従来の技術】
この種の従来例としては、例えば、下記の特許文献1や特許文献2には、自動車教習所などのように、特定のコースにおいて運転を評価するために、車両のアクセル、ブレーキ、ウィンカーなどの車両操作を検出した検出値を、その特定のコースにおける車両操作の基準値と比較して車両操作の妥当性を判断する方法が提案されている。
【0003】
【特許文献1】
特開2001−171388号公報
【特許文献2】
特開2002−46498号公報
【0004】
【発明が解決しようとする課題】
しかしながら、上記従来例において車両操作の妥当性を判断する基準値は、自動車教習所のコースなどに対してあらかじめ用意されているものや、ベテランドライバーの操作状態であり、実際の道路状況に応じて変化しないので、例えば道路工事による道路幅の減少や渋滞などにより実際の道路状況が変化している場合には、実走行時の検出値と基準値の間に大きなずれが発生し、このため、安全運転の度合いを正確に採点することができないという問題点がある。
また、道なりに曲がっている道路を走行中の場合にはウィンカーを操作する必要はないが、道なりに曲がっている道路から別の道路に直進する場合などにはウィンカー操作を怠ることが多いので、このような運転を採点することができないという問題点がある。
【0005】
本発明は上記従来例の問題点に鑑み、道路状況が変化している場合にも安全運転の度合いを正確に採点することができる安全運転採点装置、安全運転採点システム、車載装置及び安全運転採点サーバを提供することを目的とする。
本発明はまた、運転操作を間違いやすい道路における安全運転の度合いを、正確に採点することができる安全運転採点装置を提供することを目的とする。
【0006】
【課題を解決するための手段】
本発明は上記目的を達成するために、走行中の現在の道路情報を取得して、車両操作状況の基準値を現在の道路情報に基づいて実際の基準値に合うように補正するようにしたものである。
上記構成により、例えば道路工事による道路幅の減少や渋滞などにより実際の道路状況が変化している場合に、これに応じて車両操作状況の基準値を補正するので、道路状況が変化している場合にも安全運転の度合いを正確に採点することができる。
【0007】
本発明はまた、上記目的を達成するために、運転操作を間違いやすい道路における車両操作の基本の基準値を車載ナビゲーション装置の記憶媒体にあらかじめ記憶し、これと車両の操作状況を比較して運転者の安全運転の度合いを採点するようにしたものである。
上記構成により、例えば道なりに曲がっている道路から別の道路に直進する状況で、ウィンカー操作を怠った場合に採点することができる。
【0008】
【発明の実施の形態】
<第1の実施の形態>
以下、図面を参照して本発明の実施の形態について説明する。図1は本発明に係る安全運転採点装置の第1の実施の形態を示すブロック図、図2は図1の安全運転採点装置の動作を説明するためのフローチャート、図3は図1の安全運転採点装置の表示例を示す説明図である。
【0009】
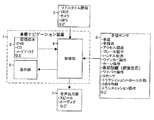
図1は本発明に係る安全運転採点装置の第1の実施の形態として、車載ナビゲーション装置1に適用した実施の形態を示し、車載ナビゲーション装置1は記憶媒体2と、制御部4と表示部6を含む。記憶媒体2はDVD、CD、ハードディスクなどであり、道路地図情報があらかじめ記憶されている。制御部4は記憶媒体2にあらかじめ記憶されている道路地図情報に基づいて車両操作の基準値をマップ化し、これを現在の道路状況を示すリアルタイム情報3に基づいて補正し、この補正した基準値と各種センサ5により検出された車両操作情報を比較して安全運転の度合いを採点し、採点結果を表示部6や音声出力部7に出力する。
【0010】
リアルタイム情報3とは、例えば道路交通情報通信システム(VICS:Vehicle Information and Communication System)や、カメラやGPS(Global Positioning System)などから得られる現在の道路情報である。また、各種センサ5により検出される車両操作情報とは、車速、車輪速、アクセル開度、ブレーキ操作、ハンドル蛇角、ウィンカー操作、ホーン操作、車間距離(前後左右)、ワイパー操作、Gセンサ、トラクションコントロール作動、ABS作動、トランスミッション操作などの、運転者がどのような運転を行なっているか把握するための情報である。
【0011】
次に図2を参照して制御部4の動作を説明する。制御部4はステップ100で車両の現在地の位置情報を取得し、次いでステップ101で記憶媒体2から現在地の道路地図情報を読み込み、次いでステップ102で現在地周辺の判定基準値をマップ化する。さらに、続くステップ103でリアルタイム情報3が取得され、続くステップ104で現在の道路状況において判定基準値のマップを変更する必要があれば、ステップ105で判定基準値のマップを変更する。判定基準値のマップを変更する必要がなければ、ステップ106へ進む。
【0012】
ステップ104と105に続くステップ106で各種センサ5の信号を取得して実走記録を作成し、続くステップ107でこの実走記録と判定基準値のマップと比較演算を行う。次いで、比較した結果(運転度合い)をステップ108で記憶し、続くステップ109で安全運転していないと判断した場合、ステップ110で表示部6あるいは音声出力部7などにより出力する。安全運転している場合又は、ステップ110を終了したときは、続くステップ111に進み、この安全運転採点機能を終了するのであればステップ112で総合結果を算出し、次いでステップ113で表示部6あるいは音声出力部7で出力する。また、ステップ111で終了しない場合はステップ100に戻る。
【0013】
図3(a)は表示部6による第1の表示例を示し、この例では、アクセルやブレーキなどの操作項目ごとの点数を100点満点で表示し、また、ホーンやミッションなどの操作項目ごとに減点数を100点満点で表示している。図3(b)は第2の表示例を示し、この例では、スピード超過や急ブレーキなどの失敗操作項目ごとの回数と総合得点を100点満点で表示している。
【0014】
この第1の実施の形態では、自車の位置周辺の道路状況に応じ「この先ではこのように運転しなければならない」という判定基準値のマップ化をする。例えば「この道路の速度制限は時速40kmなので時速40km以下で走行」という判定基準値をマップ化し、運転者がその通りの運転をしないときは採点の際、減点あるいは警告される。この方法はナビゲーションシステムを用いることによって、高速道路などの合流時の加速度合いや交差点の進入速度、あるいは時間帯によるバスレーンや中央線の変更などにも対応できるようになっており、応用範囲は広い。
【0015】
また、リアルタイム情報3のVICS情報からは、交通情報を基に工事や渋滞個所などがわかり、カメラからは前方の信号の状態、横断歩道の歩行者などがわかる。そこで、その刻々と変化する道路状況に応じて判定基準値のマップの変更を可能としている。例えば、この先で工事をしており徐行の必要性がある場合には、判定基準値は、ある法定速度であっても「工事中であり徐行にて走行」と補正され、徐行しなければ採点の際、減点あるいは警告される。採点の際の表現方法は画面表示(得点、減点された場所・区間を地図上で示したり、イエローカード・レッドカードの提示など)、音声、チャイム、ブザーなどで行う。
【0016】
このように、あらかじめ周辺の判定基準値のマップを作成しているので、運転者に的確な指示を与えることが可能であり、的確な運転をすることで、燃費の向上や排ガス低減ができる。また、演算結果を記憶しており、タコグラフの電子版としても利用できるので、事業者は安全運転の管理ができる。さらに、これらの応用で自動車教習などで実効を発揮する。
【0017】
<第2の実施の形態>
次に第2の実施の形態について説明する。ここで、例えば図4に示すように、左側に道なりに曲がっている道路を走行中の場合にはウィンカーを操作する必要はないが、この道路から別の道路に直進する場合には運転者は右折のウィンカー操作を怠ることが多い。そこで、第2の実施の形態では、このように運転操作を間違いやすい道路の情報をあらかじめ記憶媒体2に記憶しておき、運転操作を採点する地点に加えることにより、運転操作を間違いやすい道路における安全運転の度合いを正確に採点することができる。
【0018】
なお、この第2の実施の形態による発明は、図2のステップ103、104、105においてリアルタイム情報3により判定基準値のマップを変更する処理を省略したものにも適用することができる。
【0019】
<第3の実施の形態>
次に図5〜図7を参照して第3の実施の形態について説明する。ここで、第1、第2の実施の形態では、全ての処理を車載ナビゲーション装置1で行っているが、第3の実施の形態では、図5(a)に示すように安全運転採点サービスを提供するコンテンツプロバイダ(コンテンツを持つ会社)の計算用サーバ(安全運転採点サーバ)10と車載ナビゲーション装置1を無線の通信会社11のネットワークを介して接続したシステムで構成されている。このため、車載ナビゲーション装置1には図6に示すように、図1に示した構成に対して、無線通信端末8が追加されている。無線通信端末8は携帯電話や自動車用通信機器などで構成される。
【0020】
このシステムでは図5(b)に示すように、車載ナビゲーション装置1がその車両の現在の位置情報と、リアルタイム情報と実走記録(操作状況)を検出してネットワークを介して計算用サーバ10に送信し、計算用サーバ10が車載ナビゲーション装置1から送信された現在位置に基づいて走行中の現在の道路情報を取得して、運転者の安全運転の度合いを採点するための車両操作の基本の基準値を現在の道路情報に基づいて実際の基準値に合うように補正し、車載ナビゲーション装置1から送信された操作状況を補正された基準値と比較して運転者の安全運転の度合いを採点して採点結果をネットワークを介して車載ナビゲーション装置1に送信し、車載ナビゲーション装置1が計算用サーバ10から送信された採点結果を運転者に表示する。
【0021】
図7(a)は車載ナビゲーション装置1の制御部4の処理を示し、図7(b)は計算用サーバ10の処理を示している。図7(a)において、まず、ステップ201で無線の通信会社11のネットワークを介して計算用サーバ10にダイアルアップするとステップ202に進む。ステップ202ではネットワーク接続が成功すればステップ203に進み、他方、ネットワーク接続が成功しなければステップ206で確認メッセージを表示し、次いでこの処理を終了する。ステップ203では計算用サーバ10との通信シーケンスにおいて安全運転採点サービスの契約をしているか否かをチェックし、契約していればステップ100に進む。他方、契約していなければステップ204で新たに契約を行うか否かをチェックし、契約する場合は、ステップ205で契約処理をしてステップ100に進み、他方、契約をしない場合は、ステップ206で確認メッセージを表示し、次いでこの処理を終了する。
【0022】
ステップ100では車両の現在地の位置情報をGPS衛星(図5参照)などから取得し、続くステップ103でリアルタイム情報3が入力され、続くステップ106で各種センサ5の信号を取得して実走記録を作成し、続くステップ207ではこれらの位置情報、リアルタイム情報3、実走記録を計算用サーバ10に送信し、次いで図7(b)に示す計算用サーバ10の処理(ステップ208)に移行する。
【0023】
図7(b)において、まず、ステップ101で位置情報に基づいて現在地の道路地図情報を読み込み、次いでステップ102で現在地周辺の判定基準値をマップ化する。さらに、続くステップ104でリアルタイム情報3と位置情報に基づいて現在の道路状況において判定基準値のマップを変更する必要があれば、ステップ105で判定基準値のマップを変更し、ステップ107へ進む。ステップ104で判定基準値のマップを変更する必要がなければそのままステップ107へ進んで実走記録と判定基準値のマップと比較演算を行い、次いで演算結果(運転度合い)を車載ナビゲーション装置1に送信し、次いで図7(a)に示す車載ナビゲーション装置1の処理に移行する。
【0024】
図7(a)において、ステップ210で計算用サーバ10からの演算結果を受信し、続くステップ108でこれを記憶する。続くステップ109で安全運転していないと判断した場合、ステップ110で表示部6あるいは音声出力部7などにより出力する。安全運転している場合又は、ステップ110を終了したときは、ステップ111に進み、この安全運転採点機能を終了するのであればステップ211でネットワークを切断し、続くステップ112で総合結果を算出し、次いでステップ113で表示部6あるいは音声出力部7で出力する。ステップ111で同機能を終了しない場合はステップ100に戻る。
【0025】
このようなシステムによれば、車載ナビゲーション装置1の負担を軽減することができる。また、図7(a)に示す処理を実行するコンピュータプログラムを計算用サーバ10から車載ナビゲーション装置1にダウンロードすることもできるので、車載ナビゲーション装置1の機能を向上させることができる。
【図面の簡単な説明】
【図1】本発明に係る安全運転採点装置の第1の実施の形態を示すブロック図である。
【図2】図1の安全運転採点装置の動作を説明するためのフローチャートである。
【図3】図1の安全運転採点装置の表示例を示す説明図である。
【図4】本発明に係る第2の実施の形態における車載ナビゲーション装置の記憶媒体に記憶される運転操作を間違いやすい道路情報を示す説明図である。
【図5】本発明に係る第3の実施の形態の安全運転採点システムを示す構成図と送信データを示す説明図である。
【図6】本発明に係る第3の実施の形態における車載ナビゲーション装置を示すブロック図である。
【図7】図5の車載ナビゲーション装置と計算用サーバの動作を説明するためのフローチャートである。
【符号の説明】
1 車載ナビゲーション装置
2 記憶媒体
3 リアルタイム情報
4 制御部
5 各種センサ
6 表示部
7 音声出力部
8 無線通信端末
10 計算用サーバ(安全運転採点サーバ)
11 通信会社
Claims (8)
- 走行中の現在の道路情報を取得する道路情報取得手段と、
運転者の安全運転の度合いを採点するための車両操作の基本の基準値を、前記道路情報取得手段により取得した現在の道路情報に基づいて実際の基準値に合うように補正する基準値補正手段と、
車両の操作状況を検出する操作状況検出手段と、
前記操作状況検出手段により検出された操作状況を前記基準値補正手段により補正された基準値と比較して運転者の安全運転の度合いを採点する手段とを、
備えた安全運転採点装置。 - 前記車両操作の基本の基準値を、車載ナビゲーション装置の記憶媒体にあらかじめ記憶されている道路地図情報から取得してマップ化することにより生成する基本基準値生成手段をさらに備え、
前記基準値補正手段は、前記基本基準値生成手段により生成された基準値を補正することを特徴とする請求項1に記載の安全運転採点装置。 - 車載ナビゲーション装置の記憶媒体にあらかじめ記憶されている、運転操作を間違いやすい道路における車両操作の基本の基準値を取得する基準値取得手段と、
車両の操作状況を検出する操作状況検出手段と、
前記操作状況検出手段により検出された操作状況を前記基準値取得手段により取得された基準値と比較して運転者の安全運転の度合いを採点する手段とを、
備えた安全運転採点装置。 - 走行中の現在の道路情報を取得する道路情報取得手段と、
前記基準値取得手段により取得された基準値を、前記道路情報取得手段により取得した現在の道路情報に基づいて実際の基準値に合うように補正する基準値補正手段とをさらに備え、
前記採点手段は、前記操作状況検出手段により検出された操作状況を前記基準値補正手段により補正された基準値と比較して運転者の安全運転の度合いを採点することを特徴とする請求項3に記載の安全運転採点装置。 - 前記採点手段は、安全運転の度合いを運転操作項目ごとに採点して表示することを特徴とする請求項1から4のいずれか1つに記載の安全運転採点装置。
- 車載装置が少なくともその車両の現在位置と操作状況を検出してネットワークを介して安全運転採点サーバに転送し、
前記安全運転採点サーバが前記車載装置から転送された現在位置に基づいて走行中の現在の道路情報を取得して、運転者の安全運転の度合いを採点するための車両操作の基本の基準値を前記現在の道路情報に基づいて実際の基準値に合うように補正し、前記車載装置から転送された操作状況を前記補正された基準値と比較して運転者の安全運転の度合いを採点して採点結果をネットワークを介して前記車載装置に転送し、
前記車載装置が前記安全運転採点サーバから転送された採点結果を運転者に報知するよう構成された安全運転採点システム。 - 少なくともその車両の現在位置と操作状況を検出してネットワークを介して安全運転採点サーバに転送する手段と、
前記安全運転採点サーバが前記転送された現在位置に基づいて走行中の現在の道路情報を取得して、運転者の安全運転の度合いを採点するための車両操作の基本の基準値を前記現在の道路情報に基づいて実際の基準値に合うように補正し、前記転送された操作状況を前記補正された基準値と比較して運転者の安全運転の度合いを採点して採点結果をネットワークを介して転送した採点情報を受信する手段と、
前記受信した採点結果を運転者に報知する手段とを、
備えた車載装置。 - 車載装置が少なくともその車両の現在位置と操作状況を検出してネットワークを介して転送した情報を受信する手段と、
前記車載装置から転送された現在位置に基づいて走行中の現在の道路情報を取得する道路情報取得手段と、
運転者の安全運転の度合いを採点するための車両操作の基本の基準値を、前記道路情報取得手段により取得した現在の道路情報に基づいて実際の基準値に合うように補正する基準値補正手段と、
前記車載装置から転送された操作状況を前記基準値補正手段により補正された基準値と比較して運転者の安全運転の度合いを採点する手段と、
前記採点された結果をネットワークを介して前記車載装置に転送する手段とを、
備えた安全運転採点サーバ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003041852A JP2004249821A (ja) | 2003-02-19 | 2003-02-19 | 安全運転採点装置、安全運転採点システム、車載装置及び安全運転採点サーバ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003041852A JP2004249821A (ja) | 2003-02-19 | 2003-02-19 | 安全運転採点装置、安全運転採点システム、車載装置及び安全運転採点サーバ |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2004249821A true JP2004249821A (ja) | 2004-09-09 |
Family
ID=33025311
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003041852A Pending JP2004249821A (ja) | 2003-02-19 | 2003-02-19 | 安全運転採点装置、安全運転採点システム、車載装置及び安全運転採点サーバ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2004249821A (ja) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007271961A (ja) * | 2006-03-31 | 2007-10-18 | Mazda Motor Corp | 車両用運転技量判定装置 |
| JP2007271960A (ja) * | 2006-03-31 | 2007-10-18 | Mazda Motor Corp | 車両用運転技量判定装置 |
| JP2008158347A (ja) * | 2006-12-25 | 2008-07-10 | Fujitsu Ltd | 自動車教習支援プログラム、自動車教習支援方法、自動車教習支援装置 |
| WO2011043375A1 (ja) * | 2009-10-09 | 2011-04-14 | トヨタ自動車株式会社 | 車載装置、情報処理センター及び運転評価システム |
| JP2011175509A (ja) * | 2010-02-25 | 2011-09-08 | Mazda Motor Corp | 駐車支援システム |
| US8185300B2 (en) | 2008-08-07 | 2012-05-22 | Aisin Aw Co., Ltd. | Safe driving evaluation system, method, and program |
| WO2021095154A1 (ja) * | 2019-11-13 | 2021-05-20 | 株式会社日立物流 | ドライバーポイント変動システム、方法及びプログラム |
| KR20210105041A (ko) * | 2020-02-18 | 2021-08-26 | 동아대학교 산학협력단 | 가상현실 기반의 세이프 드라이빙을 위한 스크리닝 시스템 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0743566B2 (ja) * | 1990-11-29 | 1995-05-15 | 富士通テン株式会社 | 角度演算装置 |
| JPH11120488A (ja) * | 1997-10-09 | 1999-04-30 | Hitachi Ltd | 交通安全支援方法及び装置 |
| JP2000247162A (ja) * | 1999-02-26 | 2000-09-12 | Mitsubishi Motors Corp | 車両用運転状態評価装置 |
| JP2000337898A (ja) * | 1999-05-28 | 2000-12-08 | Nec Corp | 交通標識表示機能付ナビゲーションシステムおよび交通標識表示方法 |
| JP2001171388A (ja) * | 1999-12-16 | 2001-06-26 | Mazda Motor Corp | 車両用運転特性報知装置 |
| JP2001241955A (ja) * | 2000-02-25 | 2001-09-07 | Matsushita Electric Ind Co Ltd | ナビゲーション装置 |
| JP2002046498A (ja) * | 2000-08-02 | 2002-02-12 | Jatco Transtechnology Ltd | 運転者の運転操作評価装置 |
| JP2003048447A (ja) * | 2001-08-08 | 2003-02-18 | Fujitsu Ltd | 運行監視システム |
-
2003
- 2003-02-19 JP JP2003041852A patent/JP2004249821A/ja active Pending
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0743566B2 (ja) * | 1990-11-29 | 1995-05-15 | 富士通テン株式会社 | 角度演算装置 |
| JPH11120488A (ja) * | 1997-10-09 | 1999-04-30 | Hitachi Ltd | 交通安全支援方法及び装置 |
| JP2000247162A (ja) * | 1999-02-26 | 2000-09-12 | Mitsubishi Motors Corp | 車両用運転状態評価装置 |
| JP2000337898A (ja) * | 1999-05-28 | 2000-12-08 | Nec Corp | 交通標識表示機能付ナビゲーションシステムおよび交通標識表示方法 |
| JP2001171388A (ja) * | 1999-12-16 | 2001-06-26 | Mazda Motor Corp | 車両用運転特性報知装置 |
| JP2001241955A (ja) * | 2000-02-25 | 2001-09-07 | Matsushita Electric Ind Co Ltd | ナビゲーション装置 |
| JP2002046498A (ja) * | 2000-08-02 | 2002-02-12 | Jatco Transtechnology Ltd | 運転者の運転操作評価装置 |
| JP2003048447A (ja) * | 2001-08-08 | 2003-02-18 | Fujitsu Ltd | 運行監視システム |
Cited By (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007271960A (ja) * | 2006-03-31 | 2007-10-18 | Mazda Motor Corp | 車両用運転技量判定装置 |
| JP2007271961A (ja) * | 2006-03-31 | 2007-10-18 | Mazda Motor Corp | 車両用運転技量判定装置 |
| JP2008158347A (ja) * | 2006-12-25 | 2008-07-10 | Fujitsu Ltd | 自動車教習支援プログラム、自動車教習支援方法、自動車教習支援装置 |
| US8185300B2 (en) | 2008-08-07 | 2012-05-22 | Aisin Aw Co., Ltd. | Safe driving evaluation system, method, and program |
| CN102549629A (zh) * | 2009-10-09 | 2012-07-04 | 丰田自动车株式会社 | 车载装置、信息处理中心以及驾驶评价系统 |
| WO2011043375A1 (ja) * | 2009-10-09 | 2011-04-14 | トヨタ自動車株式会社 | 車載装置、情報処理センター及び運転評価システム |
| JP2011175509A (ja) * | 2010-02-25 | 2011-09-08 | Mazda Motor Corp | 駐車支援システム |
| WO2021095154A1 (ja) * | 2019-11-13 | 2021-05-20 | 株式会社日立物流 | ドライバーポイント変動システム、方法及びプログラム |
| JPWO2021095154A1 (ja) * | 2019-11-13 | 2021-05-20 | ||
| JP7267449B2 (ja) | 2019-11-13 | 2023-05-01 | 株式会社日立物流 | ドライバーポイント変動システム、方法及びプログラム |
| JP7267449B6 (ja) | 2019-11-13 | 2023-05-19 | ロジスティード株式会社 | ドライバーポイント変動システム、方法及びプログラム |
| KR20210105041A (ko) * | 2020-02-18 | 2021-08-26 | 동아대학교 산학협력단 | 가상현실 기반의 세이프 드라이빙을 위한 스크리닝 시스템 |
| KR102332097B1 (ko) * | 2020-02-18 | 2021-11-26 | 동아대학교 산학협력단 | 가상현실 기반의 세이프 드라이빙을 위한 스크리닝 시스템 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN1288424C (zh) | 对自动行驶道路优先的汽车导航系统 | |
| CN103052865B (zh) | 驾驶支持设备、驾驶支持方法 | |
| CN101870292B (zh) | 驾驶辅助装置、驾驶辅助方法和驾驶辅助程序 | |
| JP4985095B2 (ja) | 安全運転支援装置、安全運転支援方法及びプログラム | |
| CN102307755B (zh) | 车载信息处理装置、信息提供装置以及车辆用信息处理系统 | |
| US20100250045A1 (en) | Vehicle operation diagnosis device, vehicle operation diagnosis method, and computer program | |
| JPH04299379A (ja) | 車載地図表示装置 | |
| CN102341833B (zh) | 驾驶辅助装置 | |
| EP2017577A1 (en) | Navigation device | |
| CN109410617B (zh) | 汽车限速指示控制方法、装置、系统及汽车 | |
| CN105788323A (zh) | 道路速限检测系统 | |
| CN110450790B (zh) | 用于车辆的驾驶辅助装置、非暂时性计算机可读存储介质和控制方法 | |
| JP2012038024A (ja) | 運転支援装置、情報配信装置、運転支援方法及びコンピュータプログラム | |
| JPH08313291A (ja) | 車載用ナビゲーション装置 | |
| JP2010237969A (ja) | 車両操作診断装置、車両操作診断方法及びコンピュータプログラム | |
| JP2006209455A5 (ja) | ||
| JP5109749B2 (ja) | 車載報知装置 | |
| JP2008123443A (ja) | 運転支援装置 | |
| CN111640329A (zh) | 一种基于碰撞模型的车辆预警方法 | |
| JP2006209455A (ja) | 車両用運転診断装置、車両用運転診断システム、及び車両用運転診断方法 | |
| JP4924320B2 (ja) | 衝突防止支援車載器 | |
| JP2009009219A (ja) | 移動体情報装置および移動体情報プログラム | |
| JP2004249821A (ja) | 安全運転採点装置、安全運転採点システム、車載装置及び安全運転採点サーバ | |
| JP4329067B2 (ja) | 車両用ナビゲーション装置 | |
| JP2011095960A (ja) | 逆走警告装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050413 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20070914 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070921 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20071119 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20080411 |