JP2004305586A - 光走査プローブ装置 - Google Patents
光走査プローブ装置 Download PDFInfo
- Publication number
- JP2004305586A JP2004305586A JP2003105733A JP2003105733A JP2004305586A JP 2004305586 A JP2004305586 A JP 2004305586A JP 2003105733 A JP2003105733 A JP 2003105733A JP 2003105733 A JP2003105733 A JP 2003105733A JP 2004305586 A JP2004305586 A JP 2004305586A
- Authority
- JP
- Japan
- Prior art keywords
- optical
- light
- probe
- distal end
- outer cylinder
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000003287 optical effect Effects 0.000 title claims abstract description 196
- 239000000523 sample Substances 0.000 title claims abstract description 157
- 230000001678 irradiating effect Effects 0.000 claims description 12
- 238000001514 detection method Methods 0.000 claims description 7
- 239000012530 fluid Substances 0.000 description 56
- 239000013307 optical fiber Substances 0.000 description 56
- 230000002093 peripheral effect Effects 0.000 description 19
- 230000007246 mechanism Effects 0.000 description 15
- 230000005540 biological transmission Effects 0.000 description 10
- 230000004048 modification Effects 0.000 description 10
- 238000012986 modification Methods 0.000 description 10
- 239000000835 fiber Substances 0.000 description 9
- 238000007789 sealing Methods 0.000 description 8
- 238000010586 diagram Methods 0.000 description 7
- 238000003780 insertion Methods 0.000 description 7
- 230000037431 insertion Effects 0.000 description 7
- 229910052751 metal Inorganic materials 0.000 description 7
- 239000002184 metal Substances 0.000 description 7
- 238000004140 cleaning Methods 0.000 description 4
- 238000007599 discharging Methods 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 238000004659 sterilization and disinfection Methods 0.000 description 3
- 239000000853 adhesive Substances 0.000 description 2
- 230000001070 adhesive effect Effects 0.000 description 2
- 230000008878 coupling Effects 0.000 description 2
- 238000010168 coupling process Methods 0.000 description 2
- 238000005859 coupling reaction Methods 0.000 description 2
- 239000006059 cover glass Substances 0.000 description 2
- 230000000249 desinfective effect Effects 0.000 description 2
- 239000007788 liquid Substances 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 238000007747 plating Methods 0.000 description 2
- 239000011347 resin Substances 0.000 description 2
- 229920005989 resin Polymers 0.000 description 2
- 238000005476 soldering Methods 0.000 description 2
- 230000001954 sterilising effect Effects 0.000 description 2
- 230000007704 transition Effects 0.000 description 2
- RBTBFTRPCNLSDE-UHFFFAOYSA-N 3,7-bis(dimethylamino)phenothiazin-5-ium Chemical compound C1=CC(N(C)C)=CC2=[S+]C3=CC(N(C)C)=CC=C3N=C21 RBTBFTRPCNLSDE-UHFFFAOYSA-N 0.000 description 1
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 1
- 230000008602 contraction Effects 0.000 description 1
- 238000000151 deposition Methods 0.000 description 1
- 238000004043 dyeing Methods 0.000 description 1
- 230000000762 glandular Effects 0.000 description 1
- 238000005286 illumination Methods 0.000 description 1
- WABPQHHGFIMREM-UHFFFAOYSA-N lead(0) Chemical compound [Pb] WABPQHHGFIMREM-UHFFFAOYSA-N 0.000 description 1
- 230000003902 lesion Effects 0.000 description 1
- 229960000907 methylthioninium chloride Drugs 0.000 description 1
- 238000001000 micrograph Methods 0.000 description 1
- 230000010287 polarization Effects 0.000 description 1
- 229910000679 solder Inorganic materials 0.000 description 1
- 239000000758 substrate Substances 0.000 description 1
- 238000007740 vapor deposition Methods 0.000 description 1
Images















Landscapes
- Endoscopes (AREA)
Abstract
【解決手段】光走査プローブ5は外筒50内に、その長手方向に移動自在な内側プローブユニット59を配置し、この内側プローブユニット59を構成するシース41の先端部には半径方向に膨張可能で外筒50に位置決め固定するバルーン53と、その先端側に長手方向に伸張して移動自在となる弾性筒体52を設け、さらにその先端に光軸方向と直交する方向に2次元走査する光走査光学系を内蔵した先端枠体51を連結した構成にして、被検体側に凹凸があるような場合においても、バルーン53による固定位置の調整と、さらに弾性筒体52による長手方向の移動によりフォーカスする位置を被検体の深さ方向に対して可変設定して光走査画像情報を得られるようにした。
【選択図】 図4
Description
【発明の属する技術分野】
本発明は光走査プローブを用いて光学情報を得る光走査プローブ装置に関する。
【0002】
【従来の技術】
近年、光プローブ(或いは光走査プローブ)を用いて生体組織を拡大観察する光走査プローブ装置の従来例として、例えば特開2000−126115号公報がある。
この従来例では、先端面を被検部に接触させて位置決めでき、その状態で深さ方向にも光を走査し、深さ方向の画像も得られるようにしている。
【0003】
【特許文献1】
特開2000−126115号公報
【0004】
【発明が解決しようとする課題】
しかし、上記従来例では先端面で接触される部位付近にフォーカスした状態で位置決めした状態のみでしか観察できない。
つまり、先端面を接触させることにより、その先端面付近にフォーカスした状態に位置決めした状態に容易に設定できるが、得られる画像は接触された部位付近でその深さ方向への可動範囲に限定される。このため、例えば観察対象とする部位が凸部に隣接する部位であるような場合には、先端面が凸部に接触して、観察対象とする部位にはフォーカスさせにくい状況になる等、使用範囲が制約される欠点がある。
【0005】
(発明の目的)
本発明は、上述した点に鑑みてなされたもので、凹凸等があるような場合においても容易に位置決めして観察できる適用範囲の広い光走査プローブ装置を提供することを目的とする。
【0006】
【課題を解決するための手段】
体腔内に挿入される光プローブと、
被検部に光を照射するための光を発生する光源と、
光を被検部に集光して照射する集光手段と、
集光手段によって被検部を集光手段の光軸方向と直交する方向に走査する光走査手段と、
被検部からの戻り光を検出する光検出手段と、
集光手段と走査手段を内側に収納する外筒部と、
集光手段の光軸方向または光軸方向と直交する方向のうちの少なくとも1方向に沿って集光手段と走査手段を外筒部に対して移動させる移動手段と、
移動手段の基準位置を外筒部内に固定する移動手段の基準位置固定手段と、
を具備したことにより、被検部に外筒部の先端等を接触させて位置決めした状態からさらに移動手段によって集光手段と光走査手段を外筒部から移動して固定することにより、所望とする部分に集光手段をフォーカスさせて光走査画像を得られるようにしている。
【0007】
【発明の実施の形態】
以下、図面を参照して本発明の実施の形態を説明する。
(第1の実施の形態)
図1ないし図6は本発明の第1の実施の形態に係り、図1は第1の実施の形態の光走査プローブ装置の全体構成を示し、図2は内視鏡のチャンネル内に挿通される光走査プローブを示し、図3は図2の先端付近を拡大して示し、図4は光走査プローブの先端側の構成を示し、図5は変形例の光走査プローブの先端側の構造を示し、図6は光走査プローブの手元側コネクタ付近の構造を示す。
【0008】
図1に示す第1の実施の形態の光走査プローブ装置60では、低コヒーレンス光源1から出射した近赤外の低コヒーレンス光は、第1の光ファイバ6に導光され、4つの入出力を有する光カプラ8によって第3の光ファイバ9と第4の光ファイバ10に分岐される。
【0009】
第3の光ファイバ9にはエイミングビームレーザ3からの出射した可視レーザ光が光カプラ12により合波される。第3の光ファイバ9は、光コネクタ4により第5の光ファイバ13に接続され、体腔内に挿入される光走査プローブ5に低コヒーレンス光を伝送する。
そして、光走査プローブ5の先端部に内蔵した後述する対物ユニット30を走査することにより、観察光(観察ビーム)24を走査して、観察対象25の表面付近の観察点に集光できるようにしている。
【0010】
光走査プローブ5は、図2に示すように細長で可撓性を有するシース41で覆われており、内視鏡42のチャンネル43内に挿入可能である。内視鏡42は細長で可撓性を有する挿入部44と、この挿入部44の後端に設けられた操作部45とを有し、操作部45の前端付近には挿入部44内部に設けられたチャンネル43に連通する処置具挿入口46が設けてあり、光走査プローブ5を挿入することができる。
【0011】
そして、内視鏡42による観察下で、病変組織か否かを調べたいような場合には、図3に拡大して示すようにチャンネル43の先端から光走査プローブ5の先端側を突出し、調べたい観察対象25の表面近くに先端面を設定して光走査プローブ5による光走査画像、より具体的には開口数の大きい、短焦点の集光レンズ27により倍率の高い顕微鏡画像を得ることができるようにしている。
図3は内視鏡42の先端部47の構成と共に、光走査プローブ5の先端側の構成も示している。
【0012】
光走査プローブ5は、先端面が開口する硬質の外筒50で覆われ、この外筒50の先端内側には、先端の開口が図示しないカバーガラスで覆われた先端枠体51で覆われてその硬質の先端部が形成され、この先端枠体51の後端(基端)はこのプローブ5の長手方向に伸張する弾性筒体52に気密的に接続されている。
そして、この弾性筒体52を伸張させることにより、その先端側の先端枠体51を外筒50の長手方向に移動できるようにしている。
【0013】
この弾性筒体52の後端は、接続部材61を介してシース41の先端部に接続され、このシース41の先端部付近の外周面には略リング状のバルーン53が設けてある。このバルーン53はシース41の先端部付近に設けた孔を介して内部の流体通路54と連通している。
【0014】
そして、手元側から流体通路54を介して流体、より具体的には加圧空気(圧縮空気)55を送り込むことにより、バルーン53を図3の点線で示すように膨張させて、シース41をその外側の外筒50の内壁に密着させて、外筒50内側のプローブ部分(内側プローブユニット59と言う)の先端側を外筒50に固定できるようにしている。
つまり、光走査プローブ5はこのバルーン53が設けられた位置の外周面が外筒50の内壁面に固定されるので、このバルーン53が設けられた部分は固定手段の機能を持つ。
【0015】
また、弾性筒体52の後端に設けた連結部材58は先端枠体51及び弾性筒体52の外径よりも外側に突出するフランジ部が形成され、このフランジ部を外筒50の先端付近の基準位置となる内周面に設けた突起部50aに当接させて内側プローブユニット59を外筒50内で基準位置に位置決めできるようにしている。
【0016】
また、以下に説明するように、弾性筒体52を長手方向に伸縮(より具体的には伸張)させることにより、内側プローブユニット59の先端側はバルーン53で固定された位置を固定基準位置として先端枠体51をその長手方向に移動させることができ、この弾性筒体52は先端枠体51(に収納した集光手段及びその光手段を)を移動する移動手段の機能を持つ。
【0017】
より具体的には、加圧空気55を送り込むことにより、弾性筒体52を長手方向に伸長させ、弾性筒体52の前端にその後端を接続した先端枠体51を前方に移動させ、プローブ5の長手方向に観察点26を走査できるようにしている。
【0018】
この場合、フランジ部を基準位置の位置決め用の突起部50aに当接させた状態では、観察点26は観察対象25の表面付近となるように突起部50a或いはフランジ部が形成されている。
【0019】
そして、バルーン53を膨張させることにより、内側プローブユニット59をこの基準位置から後方側に移動しないように固定(ロック)できる。この状態で弾性筒体52を伸長させることにより、その基準位置の場合に対応する観察点26からより深部側に移動させて所望とする深さ位置での観察像を得ることができる。
なお、弾性筒体52を伸張でなく伸縮可能にした場合には、表面側となる浅い距離側での観察像も得ることもできる。
【0020】
図3に示すように第5の光ファイバ13の先端部から出射された低コヒーレンス光は、集光レンズ(対物レンズ)27によってその光軸O方向の観察光(観察ビーム)24として観察対象25内部の観察点26に集光される。
【0021】
第5の光ファイバ13の端部と集光レンズ27を備えた対物ユニット30は、光走査手段28を有し、観察光24および観察点26をプローブ5の長手方向、つまり前後方向と直交する2次元方向に動かしながら、被検体である観察対象25を走査する。つまり、この対物ユニット30は観察光24を2次元走査する光走査光学系を形成している。
【0022】
なお、対物ユニット30を構成する光走査手段28の例えば底部は先端枠体51内壁に固定され、この先端枠体51が前後に移動されると、対物ユニット30も前後に移動される。そして、上述のように弾性筒体52を長手方向に伸長或いは収縮させると、それに伴って先端枠体51と共に対物ユニット30も移動し、観察点26を観察対象の深さ方向に走査することができる。光走査手段28は、図1に示す走査駆動手段22により駆動される。
また、先端枠体51を前後に移動させる移動手段としての弾性筒体52を流体の給排により駆動する移動手段の駆動手段57はスイッチ56でその駆動のON/OFFの切替操作を行えるようにしている。
【0023】
なお、駆動手段57を駆動/停止の切替操作を行うスイッチ56としては、光走査プローブ5の後端側や、内視鏡42に設けたハンドスイッチで形成することができる。また、フットスイッチ等で形成しても良い。
【0024】
図1に示すように第4の光ファイバ10は周波数シフタ11に接続され、周波数シフタ11の出力は、第6の光ファイバ14に導光される。周波数シフタ11としては、音響光学素子(AO)や、電気光学素子(EO)、ピエゾ素子にファイバループを設けたもの等の位相変調手段を用いることができる。
【0025】
第6の光ファイバ14の端部から出射した光は、コリメータレンズ15を介して可動ミラー16に導光される。可動ミラー16は、ミラー駆動手段17によって出射光の光軸方向に移動することができる。第6の光ファイバ14の端部、コリメータレンズ15、可動ミラー16及びミラー駆動手段17により、光路長調節手段18が構成されている。
【0026】
光カプラ8の残りの端子である第2の光ファイバ7は光ディテクタ2に接続されている。第1の光ファイバ6、第2の光ファイバ7、第3の光ファイバ9、第4の光ファイバ10、第5の光ファイバ13及び第6の光ファイバ14としては、好ましくはシングルモードファイバまたは、コヒーレンス性を十分に維持することの可能な低次マルチモードファイバ、偏波保持ファイバなどを用いることができる。
【0027】
低コヒーレンス光源1から出射した近赤外の低コヒーレンス光は、第1の光ファイバ6に導光され、光カプラ8より第3の光ファイバ9と第4の光ファイバ10に分岐される。第3の光ファイバ9に導光された光は、光コネクタ4、第5の光ファイバ3を介して光走査プローブ5に導光され、観察対象25に観察光24として出射される。
【0028】
観察光24および観察点26による走査は、光走査手段28及び深さ方向走査手段として機能する移動手段となる弾性筒体52によって観察対象25に対して行われる。
観察点26における観察対象25からの反射光あるいは散乱光は、集光レンズ27を介して第5の光ファイバ13に戻り、経路を逆に辿るように第3の光ファイバ9に戻る。この光の経路を物体側32とする。
【0029】
同様に、第4の光ファイバ10に分岐した低コヒーレンス光は、周波数シフタ11で周波数遷移が行われ、第6の光ファイバ14を介してコリメータレンズ15に出射される、コリメータレンズ15に入射した光は、略平行光に変換され、可動ミラー16へ導かれる。可動ミラー16で反射した光は、再びコリメータレンズ15によって第6の光ファイバ14に導かれ、第4の光ファイバ10に戻る。この光の経路を参照側33とする。
【0030】
物体側32と参照側33の2つの光が、光カプラ8により混合される。光物体側32の光路長と参照側33の光路長が低コヒーレンス光源1のコヒーレンス長の範囲で一致した場合には、第2の光ファイバ7を通った、周波数シフタ11の周波数遷移量の等倍または2倍の周波数の変動を有する干渉光が、光ディテクタ2によって検出される。
【0031】
ここで、参照側33の光路長を物体側の観察点26までの光路長に一致するように、光路長調節手段18のミラー駆動手段17により可動ミラー16の光軸方向の位置を予め調整しておくことによって、観察点26からの情報が干渉光として常に得られることになる。
【0032】
この検出された干渉光は、光ディテクタ2により電気信号に変換される。その電気信号は、復調器19へ供給される。周波数シフタ11の周波数遷移量の等倍、2倍又は高次倍の周波数近傍の信号だけを復調器19によって取り出すことによって、観察点26からの信号を光ヘテロダイン検出により高S/Nで検出できる。
【0033】
走査駆動手段22により観察光24の観察点26を略垂直方向に2次元に動かすことができる。その走査の制御信号と同期して、アナログディジタル(A/D)コンバータ20を介して復調器19の信号は、走査駆動手段22及び移動手段の駆動手段57からの観察点26の走査位置信号に対応してパーソナルコンピュータ(以下、PCと略す)21に取り込まれる。観察点26の走査位置信号に対応して復調信号を輝度によってPC21のディスプレイ23に表示する。移動手段の駆動手段57により観察光24の観察点26を略深さ方向に走査することにより、観察対象25の各深さ位置での2次元の断層像を得ることができる。
また、ミラー駆動手段17により可動ミラー16を光軸方向に移動させることにより、深さ方向の断層像を得ることもできる。
【0034】
図1は低コヒーレンス光源1を用いた光走査プローブ装置60で説明したが、図1において、第4の光ファイバ10に設けた周波数シフタ11や、第6の光ファイバ14及び符号15〜18に示す構成要素を設けないで共焦点型の光走査プローブ装置を構成してもほぼ同様の作用効果を持つ。
【0035】
また、この場合には、図3における光ファイバ13の小径の先端面と観察点26とは集光レンズ27により共焦点関係に設定されており、光ファイバ13の小径の先端面から出射された光は観察点26でフォーカス状態となり、この観察点26で反射された光のみが光ファイバ13の小径の先端面に入射されるようになる。
その他は図1〜3で説明した構成は同じものを採用できる。以下の光走査プローブは低干渉及び共焦点関係のいずれにも適用できる。
【0036】
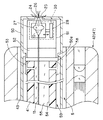
次に光走査プローブ5のより具体的な構成を説明する。図4(A)は光走査プローブ5の先端側の構造を示す。
シース41の先端部には硬質のリング状の連結部材49を介してゴム管等、膨張及び収縮自在で固定手段の機能を持つ円筒状の弾性筒体(或いはバルーン)53が気密的及び水密的に接続され、このバルーン53の先端にはさらに硬質の連結部材58を介して移動手段の機能を持つ弾性筒体52が気密的及び水密的に連結され、この弾性筒体52の先端に硬質の先端枠体51の基端が気密的に連結されている。この場合、図4(A)から分かるようにシース41の先端側はシース41と同じ外径で形成されている。
【0037】
弾性筒体52は例えばゴム等の弾性部材を円筒状に形成すると共に、例えばその内部にはスパイラル状にしたコイルバネ等を埋め込み、半径方向に伸縮するこを抑制して、その円筒の軸(長手)方向のみに伸張可能にしている。
【0038】
また、シース41の内側には、このシース41の内径よりも小さい外径を有し、流体を挿通可能とするチューブ61が挿通され、このチューブ61の先端は連結部材58の内周面にその外周面が気密的に固定され、このチューブ61の先端は弾性筒体52の内側で開口している。
【0039】
また、このチューブ61の内側には光ファイバ13と光走査手段28を駆動する信号を伝送する信号ケーブル62が挿通され、光ファイバ13及び信号ケーブル62はチューブ61の先端からさらに弾性筒体52、先端枠体51の基端の小径の孔を経てその前方側まで延出されている。先端枠体51の基端の小径の孔では封止樹脂63により封止された状態で固定されている。
【0040】
このようにして、シース41の内部はチューブ61内側により弾性筒体52をその軸方向に伸縮させるための流体55aを給排する第1の流体路54aと、このチューブ61の外周側とシース内側とで形成され、円筒状バルーン53を膨張させるための流体55bを給排する第2の流体路54bとが形成されている。
【0041】
また、図3で説明したように外筒50にはその内周面に突起部50aが設けてあり、内側プローブユニット59側の連結部材58に設けたフランジ部を当接させることにより、内側プローブユニット59側を(観察に適した)基準位置に位置決めできるようにしている。
【0042】
そして、第2の流体路54bを介して加圧された流体55bを先端側に供給することにより、図4(A)に示すようにバルーン53を膨張させて、このバルーン53を外筒50の内壁に密着させ、内側プローブユニット59の先端側を固定できるようにしている。
【0043】
また、先端枠体51の内部には、対物レンズ27と、この対物レンズ27をその先端に取り付けたレンズ枠64と、このレンズ枠64における後方側に延出された延出部64aには光走査手段を構成する2つの圧電素子65a、65bとが直交する方向に取り付けられている。
【0044】
この場合、先端枠体51内の光ファイバ13の先端側は対物レンズ27の光軸に沿ってその途中は圧電素子65bを取り付けたレンズ枠64の延出部64aの裏面側で保持されて前方に延出され、光ファイバ13の先端面から出射される光は、対物レンズ27により集光されて、対物レンズ27に関してこの光ファイバ13の先端面と共役な観察点26で集光される。
【0045】
圧電素子65aと65b(の電極)は信号ケーブル62における直交する2つの駆動信号をそれぞれ伝送する信号線とそれぞれ接続されている。そして、駆動信号を印加することにより、圧電素子65aは図4(A)に示したXYZの座標系において、紙面内でY軸方向に対物レンズ27等を移動し、圧電素子65bは紙面垂直方向となるX軸方向に対物レンズ27等を移動する。
つまり、圧電素子65aと65bを駆動することにより、対物レンズ27から観察対象25に集光された観察点26はXY平面を2次元的に走査する。
【0046】
また、第1の流体路54aを介して加圧された流体55aを先端側に供給することにより、図4(A)に示す弾性筒体52はその円筒の軸方向に伸張させることができ、この弾性筒体52の伸張により、その先端に取り付けた先端枠体51を前方側に移動することができる。
【0047】
例えば最大に加圧した流体55aを供給した場合には、図4(A)の実線で示す位置から点線で示す位置まで、その先端面を移動させることができる。この場合にはΔZだけ、移動させることができ、従って、黒丸で示す観察点26もΔZだけ、移動した白丸で示す観察点26になる。従って、弾性筒体52を伸張させる量を可変設定することにより、観察点26の位置を深さ方向(図4(A)でZ方向)に微調整することができる。
【0048】
また、圧電素子65a、65bによる2次元走査と共に、弾性筒体52の伸張量を変化させることにより、深さ位置が異なる2次元画像を略連続的に得ることもできる。そして、3次元画像を構築することもできる。
【0049】
また、本実施の形態では、図4(B)に示すように外筒50の内周面には例えば上下方向に設けた突起部50aの他に、左右方向にも突起部50a′が設けてあり、連結部材58の上下方向に突出させたフランジ部を90度回転させることにより、突起部50aよりも距離Dだけ先端側に設けた突起部50a′に当接させて、この突起部50a′の位置で内側プローブユニット59側を固定することもできるようにしている。
【0050】
この状態において、弾性筒体52を伸張させると、図4(A)の状態よりもさらに距離Dだけ前方に移動させた状態の観察状態に設定できる。この場合には弾性筒体52を最大限伸張させると、先端枠体51の先端面は外筒50の先端内面に近接した位置となる。
【0051】
従って、例えば観察対象25が凸部に隣接した凹部にあるような場合には、突起部50a′の位置で内側プローブユニット59側を固定することにより、その凹部側にフォーカスさせて観察することもできるようにしている。
【0052】
本実施の形態によれば、外筒50内に移動自在となるシース41及びその先端側に外筒50に膨張により固定するための固定手段と、長手方向に移動可能とする移動手段としての弾性筒体52と、さらにその先端側に光の走査手段及び集光する集光光学系を収納した先端枠体51とを設けているので、簡単な操作で観察対象25に対する光走査による光学像を得ることができる。
【0053】
具体的には、観察対象25側が平面状或いは凸部である場合は、筒体50の先端開口を観察対象25に接触させて観察の位置決めを行い、また固定の際の基準位置となる突起部50aに内側プローブユニット59のフランジ部を当接させることにより、図4(A)に示すように観察対象25に対して観察点26にフォーカスさせてその光学像を得ることができる。
【0054】
また、観察対象25が凸部に隣接する凹部となっており、凸部からΔZ以上に引っ込んでいるような凹部である場合においては、図4(B)に示す突起部50a′に内側プローブユニット59のフランジ部を当接させることにより、図4(A)に示す場合と同様に観察対象25に対して観察点26にフォーカスさせてその光学像を得ることができる。
【0055】
また、本実施の形態では外筒50の先端面には観察用の開口が設けてあり、この開口内側に大きく突出する(開口内側に深く入り込んでくる)部位の場合においても内側プローブユニット59側を固定する位置を変更することにより、その部位を(従来例における先端面で押圧させて変形させてしまうような可能性もなく)観察することもできる。
【0056】
このように本実施の形態によれば、集光手段及びその光走査手段を収納した先端枠体51を、弾性筒体52によりその長手方向に移動自在とする移動手段を構成すると共に、さらにこの内側プローブユニット59を内側に収納し、外筒50に(観察に適した基準位置に)固定する固定手段とを設けているので、固定位置を可変することにより、移動手段のみによる移動範囲でカバーできない範囲に対しても、集光手段で集光させて観察像を得ることができ、従来例に比べてより広範囲に適用ができる。
【0057】
なお、外筒50側の内周面にスパイラル状の突起部を設けるようにして、内側プローブユニット59側を回転させることにより、内側プローブユニット59側のフランジ部の基準位置を連続的に可変できるようにしても良い。
【0058】
次に図5を参照して変形例の光走査プローブ5Bの先端側の構成を説明する。図5に示す光走査プローブ5Bでは、シース41内部には図4(A)で示したチューブ61を設けないで、その代わりに外筒50内に流体通路66を設け、外筒50の内周面に開口する先端にバルーン67を取り付け、この流体通路66を介して流体55bを供給することにより、バルーン67を膨張(拡張)させて、この外筒50の内側に移動自在に配置された内側プローブユニット59の先端側を固定できるようしている。そして、この場合には、外筒50内の長手方向の任意の位置で内側プローブユニット59の先端側を固定することができるようにしている。
【0059】
外筒50側からバルーン67により内側プローブユニット59の先端側を固定するようにしているので、シース41の先端には図4(A)における筒状のバルーン53を設けてなく、連結部材49を介して気密にされた弾性筒体52に連結している。
【0060】
従って、シース41の内側にはこのシース41自体により、弾性筒体52を伸張させる流体通路54aが形成され、流体55aを供給することにより弾性筒体52を伸張させることができる。
【0061】
この弾性筒体52の先端には連結部材68を介して先端枠体51の基端が固定されると共に、対物レンズ27を先端付近に取り付けたレンズ枠69の基端が固定されている。
【0062】
この連結部材68の中央付近に設けた孔には、シース41及び弾性筒体52の例えば中心軸に沿って挿通された光ファイバ13の先端付近と信号ケーブル62の先端付近とが封止樹脂63で封止されている。また、この封止樹脂63で封止された位置より前方となる光ファイバ13の先端は、光導波路基材70に取り付けられている。
【0063】
この光導波路基材70は、連結部材68の先端面に取り付けられた走査ミラー71に固定されている。この走査ミラー71の中心付近には小孔71aが設けてあり、光ファイバ13の先端面から出射された光を通す。
【0064】
この小孔71aを通った光は、この小孔71aに対向する前方に配置された対物レンズ27の後面に照射し、この後面の中央付近の表面にアルミの金属膜等を設ける等して形成したミラー面27aで反射される。その反射光は走査ミラー71で2次元に走査され、この走査ミラー71で前方側に反射された光は、対物レンズ27の光軸Oから離間した外側寄りの部分に入射され、前方の観察点26で集光されるように照射される。
【0065】
なお、図5の光走査プローブ5Bの構成例では、外筒50の先端の観察窓は透明なカバーガラス72で閉塞されている。図5の状態では、観察点26は光軸O上にあるが、走査ミラー71に信号ケーブル62の信号線を経て駆動信号を印加することにより、光軸Oと直交する方向に走査することができる。
【0066】
この光走査プローブ5Bの手元側の構造は図6のようになっている。
外筒50の後端にはナット部73の固定端が固定されており、他端の雌ネジ部には、この外筒50内を挿通された内側プローブユニット59の手元側(基端)に連結して設けた手元側コネクタ74の前端付近に設けたネジ部75が螺合して取り付けられている。
【0067】
このように外筒50側と内側プローブユニット59側とをナット部73及びネジ部75との螺合で取り付けることにより、外筒50に対して内側プローブユニット59側の固定位置を基準位置となるように固定できるようにすると共に、螺合量を調整することにより、基準位置を微調整できるようにしている。
【0068】
また、先端でバルーン67と接続された流体通路66は外筒50の後端付近で流体用コネクタ76と接続され、この流体用コネクタ76を一端に設けたバルーン用流体通路を形成するチューブ77の他端は図示しないポンプ等の(移動手段の駆動手段としての)流体供給源に接続される。
【0069】
また、外筒50の基端のナット部73とネジ部75による螺合で保持される手元側コネクタ74には、その後端に光ファイバ接続コネクタ78と信号ケーブル接続用コネクタ79とが設けられている。また、手元側コネクタ74の側面には、弾性筒体52を伸張させる流体55aを供給するための流体用コネクタ80が接続され、このこの流体用コネクタ80を一端に設けた弾性筒体用流体通路を形成するチューブ81の他端は図示しないポンプ等の流体供給源に接続される。
【0070】
上述の実施の形態によれば、非観察時に、外筒50を内側プローブユニット59から取り出し可能であるので、洗浄が容易である。また、外筒50は高価な走査手段や集光手段と分離した構造なので、ディスポーザブルな部品にすることも可能である。
【0071】
本変形例における光走査プローブ5Bの作用は図4の光走査プローブ5の場合とほぼ同様である。
【0072】
(第2の実施の形態)
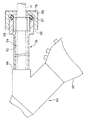
次に図7及び図8を参照して本発明の第2の実施の形態を説明する。なお、第1の実施の形態と同じ構成要素には同じ符号を付け、その説明を省略する。
図7に示す光走査プローブ5Cは側視用の光走査プローブであり、光ファイバ13の先端側に側視用光走査手段83を設けている。従って、この場合には弾性筒体52は集光手段の光軸と直交する方向に移動する移動手段の機能を持つことになる。
【0073】
また、本実施の形態では外筒50における先端寄りの所定位置には、テーパ状に内径を変化させた内径部50bが設けてあり、内側プローブユニット59側には、シース41の先端の連結部材84にはこの内径部50bに当接するようにテーパ状の外径部84aを設けている。
【0074】
そして、図8に示すように外筒50の基端に(あるいは基端部材を介して)取り付けたコイル状のバネ85により外筒50側を後方側に付勢して内径部50bを外径部84aに当接させて基準位置に位置決め固定できるようにしている。
【0075】
この場合、バネ85はその一端(前端)が外筒50側に固定され、他端側がシース41を通した内側リング86に取り付けられ、この内側リング86はその外周面に設けたネジ部が外側リング87の内周面のネジ部に螺合して取り付けられる。
【0076】
また、内側リング86の後端と外側リング87の間にはOリング88が配置され、このOリング88を内側リング86と外側リング87の螺合量を大きくしてその間の間隔を小さくして押しつぶすようにすることにより、内側リング86と外側リング87部分をシース41に固定できるようにしている。
【0077】
つまり、図8のようにOリング88を押しつぶすようにすることにより、バネ85を伸張させた状態でその後端側をシース41に固定し、このバネ85の伸張された状態により外筒50は後方側に付勢された状態となり、その内径部50bは外径部84aに当接する状態にロックされる。
【0078】
図7に示すように連結部材84の先端に、その後端が固定された弾性筒対52の前端はさらに連結部材89を介して先端枠体51の後端に連結固定され、この連結部材89には光ファイバ13の先端がフェルール90を介して固定されている。
【0079】
この光ファイバ13の先端面は斜面状にされ、この斜面から出射された光は、2次元走査手段としてのジンバルミラー91により反射された後、この先端枠体51における開口する側面にレンズ枠92を介して取り付けた対物レンズ27に入射され、側面方向に出射される。そして、この対物レンズ27に対向する側面全周を透明部材で形成した観察窓93を通ってその外側の位置の観察点26に集光される。
【0080】
なお、連結部材89は信号ケーブル62の先端側も固定されている。そして、この信号ケーブル62の信号線はジンバルミラー91の電極に接続され、駆動信号をジンバルミラー91に印加することにより、光を2次元的に走査する。
【0081】
また、シース41の内側は弾性筒体52を伸張させる流体55aの流体通路54aとなっており、流体55aを供給することにより、この弾性筒体52は伸張し、先端枠体51の先端面は点線で示す位置まで移動する。
【0082】
このため、対物レンズ27による観察点26も黒点で示す位置から白丸で示す位置まで対物レンズ27の光軸と直交する方向、つまり側方にΔZ、移動することになる。
本実施の形態によれば、広範囲の側方に対して観察像を得ることができる。
【0083】
図9は変形例における光走査プローブ5Dの先端側の構造を示す。図9(A)は光走査プローブ5Dの先端側の構造を示し、図9(B)はそのA−A′断面を示す。
【0084】
図7の光走査プローブ5Cでは内側プローブユニット59を回転することにより、その回転に応じて観察点26もプローブ5Cの長手方向の周りで変化するようにしていた。
これに対して、図9の光走査プローブ5Dでは、周方向の位置決め手段を設け、所定の側方方向のみで観察する構造にしている。
【0085】
このため、例えば先端枠体51の基端付近には突起94が設けてあり、かつ外筒50側にはこの突起94が係入され、長手方向に沿ったガイド溝50cが設けてある。また、この状態で、対物レンズ27に対向する部分の外筒50には観察窓93bが設けてある。
本変形例によれば、所定の側方以外の方向に内側プローブユニット59側が回転しない回転規制手段が設けてあるので、所定の側方のみで観察する場合には、観察し易くなるという効果がある。
【0086】
図10は第2変形例における光走査プローブ5Eの後端寄りの構成を示す。本変形例では、光走査プローブ5Eにおける移動手段の基準位置固定手段を光走査プローブ5Eの後端側に設けた例を示し、図10では内視鏡42の処置具挿入口46の後端側、つまり処置具挿入口46に挿入されていない部分に固定手段を設けた構造を示す。
【0087】
この場合においては外筒50の基端に設けた内側リング96は間にOリング97を介挿して外側リング98と螺合する。
また、内側プローブユニット59のシース41側にはネジ部75が設けてあり、このネジ部75には微調リング99が螺合により取り付けてある。
【0088】
そして、この微調リング99の外側を覆う内側リング96と外側リング98との螺合量を大きく締め付けることにより、Oリング97を押圧変形させて内側リング96等、つまり外筒50の基端をシース41に固定(ロック)できるようにしている。
【0089】
また、この固定状態で、外側リング98を回転することにより、微調リング99をネジ部75から前後に移動させることができるようにしている。つまり、移動手段の基準位置固定手段を光走査プローブ5Eの手元側に設け、さらに固定位置を微調整できるようにしている。
【0090】
(第3の実施の形態)
図11は本発明の第3の実施の形態における光走査プローブ5Fの先端側の構成を内視鏡42のチャンネル43を挿通した状態で示す。
この光走査プローブ5Fは図4(A)の光走査プローブ5に類似した構成となっているが、外筒50を取り外し可能にしている。
【0091】
シース41の先端には連結部材49を介して拡張することにより固定する機能を持つ円筒状の弾性筒体(バルーン)101が連結され、この弾性筒体101の先端には連結部材102を介して取り外し可能な外筒50が取り付けられると共に、その内側の移動手段として、気密にされた弾性筒体52と連結されている。また、この弾性筒体52の先端には先端枠体51が連結されている。
【0092】
つまり、本実施の形態では、先端枠体51及びその基端の弾性筒体52部分が外筒50により覆われており、シース41及び弾性部材101の外側は外筒50には覆われていない。
このため、シース41の先端に設けた弾性筒体101は内視鏡42のチャンネル43に固定する固定手段としの機能を持つ。なお、チャンネル43の先端内周面には突起部43aが設けてあり、この突起部43aの後端で弾性部材101を膨張させて、基準位置に固定できるようにしている。
【0093】
連結部材102の外周面には凸部102aが設けてあり、外筒50の後端内周に設けた凹部を凸部102aに嵌合させることにより外筒50を取り外し可能に固定できるようにしている。
また、光ファイバ13の先端はフェルール103に固定され、この光ファイバ13の先端から出射された光はミラー104で反射された後、ジンバルミラー105で反射された後、対物レンズ27により観察点26に集光されるようにして出射される。
【0094】
そして、気密にされた弾性筒体52に流体55aを供給して伸張させることにより、先端枠体51を前方側に移動し、観察点26も移動させることができるようにしている。その他は図4(A)とほぼ同様の構成である。
【0095】
また、この光走査プローブ5Fの後端側の構成を図12に示す。
シース41の後端及びチューブ61の後端はそれぞれ略円筒状の連結部材131及び132を介して金属製の枠体133及び134に連結されている。また、このチューブ61の内側に挿通された光ファイバ13及び信号ケーブル62は、枠体134の後端に設けた気密封止部135を通して後端のファイバ接続コネクタ136及びケーブル接続コネクタ137にそれぞれ接続されている。
【0096】
気密封止部135は例えば光ファイバ13の外周面に金属膜138を蒸着或いはメッキで形成し、その金属膜138を金属製の枠体134に半田付け(この半田付け部分を符号139で示す)して高温高圧の蒸気滅菌(オートクレーブ滅菌)にも対応可能な気密構造にしている。
【0097】
つまり、光ファイバ13はそのままでは金属と半田付けできないので、蒸着或いはメッキでその外周面に金属膜138を形成して半田付けできるようにしている。
【0098】
また信号ケーブル62も同様にその外周面に金属膜138′を形成して半田付け(この半田付け部分を符号139′で示す)して気密構造にしている。また、枠体134とその外側の枠体133との間は半田で封止されている。
【0099】
洗浄液や消毒液で洗浄や消毒を行う場合には、信号ケーブル62の周囲を接着剤で封止するなどしてもよいし、また光ファイバ3の周囲も接着剤等を用いた封止部材で封止する等してもよい。
このように光ファイバ13をファイバコネクタを設けないで封止することにより、その場合に発生する光量ロスを低減している。
【0100】
また、それぞれ流体55a、55bの流体通路54a、54bに連通する枠体133及び134は後端付近の側方で開口し、流体挿通路を形成するチューブ141の一端を接続し、このチューブ141の他端に気密コネクタ142を取り付け、ポンプ等の流体供給源に着脱可能で接続できるようにしている。
本実施の形態は第1の実施の形態等とほぼ同様の作用効果を有すると共に、外枠50を簡単に取り外しができ、洗滌や消毒を簡単に行うことができる。
【0101】
図13(A)は変形例における外筒50の取り外し可能とした固定機構を示す。この場合には連結部材102の外周面に周溝を設けてOリング111を収納し、このOリング111にその内周面が圧接する外筒50の基端をその摩擦力で取り外し可能に固定できるようにしている。
【0102】
また図13(B)では連結部材102側にネジ部112を形成し、外筒50の後端内周面にはこのネジ部112に螺合するネジ部113を形成して外筒50の基端を螺合により取り外し可能に固定できるようにしている。
また、図14に示すように内視鏡42側に、そのチャンネル43内に挿通される光走査プローブ5Gの先端側を基準位置で固定する手段を設けるようにしても良い。
【0103】
内視鏡42には流体供給用の流体通路(チャンネル)115を形成し、チャンネル43で開口するこの流体通路115の先端にバルーン116を取り付けている。このバルーン116を流体で膨張させることにより光走査プローブ5Gの先端側に設けた突起部117に当接するようにして基準位置で固定できるようにしている。
【0104】
図15に示す光走査プローブ5Hは、外筒50の基準位置付近にスリット部121を設け、この外筒50の内側の内側プローブユニット59に設けた弾性筒体101を流体55bの供給により図15に示すように半径方向外側に膨張させることにより、内視鏡42のチャンネル43に固定できるようにしている。
【0105】
図16(A)は外筒50の縦断面を示し、そのC−C′断面を示す図16(B)はスリット部121の構造を示している。
図16に示すように外筒50には例えば対向する2カ所を切り欠いて、この外筒50の内外を連通させたスリット部121が形成されており、このスリット部121の内側に配置される図15に示す弾性筒体101を膨張させることにより、このスリット部121を通して、この光走査プローブ5Hにおける内側プローブユニット59をチャンネル43の内壁に固定できるようにしている。
【0106】
この固定状態では、先端枠体51の先端面は、プローブの長手方向のBの位置にあり、固定位置をより前方側に移動した場合には、先端枠体51の先端面の位置を図15のB1の位置に設定することもできるし、固定位置を後方側に移動した場合には、先端枠体51の先端面の位置を図15のB2の位置に設定することもできる。
【0107】
その他の構成は図11と同様であり、その説明を省略する。この光走査プローブ5Hにおいては、深さ方向に対して広い距離範囲で固定位置を可変設定して、2次元画像を得ることができる。
【0108】
(第4の実施の形態)
図17は本発明の第4の実施の形態における光走査プローブ5Iを示す。この光プローブ5Iは、例えば図4(A)或いは図5における先端枠体51内部の光走査光学系の代わりに以下に説明する高倍率観察光学系161を設けた構成にしている。
【0109】
本実施の形態では、観察しようとする観察対象25側はメチレンブルー等、内視鏡観察で一般的に用いられている色素で染色した後、洗浄し、内視鏡の鉗子チャンネルに挿通できる光走査プローブ5Iの外筒50の先端開口を接触させる等して観察する。この場合、500〜1000倍程度の倍率で、細胞、腺構造が観察できる。
【0110】
図17に示すように外筒50内側に配置される先端枠体51の内側には、開口数が大きく、焦点距離を短くした高倍率の対物レンズ162を取り付けたレンズ枠163と、このレンズ枠163の周囲に配置されたライトガイド164とを設けている。また、対物レンズ162の結像位置にはCCD165が配置され、高倍率観察手段が形成されている。
【0111】
CCD165はCCDケーブル166と接続され、このCCDケーブル166は先端枠体51の基端付近でライトガイド164と共通のチューブ167内に収納されている。
ライトガイド164の後端は図示しない光源装置に接続され、光源装置から供給される照明光を伝送してその先端面から出射し、対向する観察対象25側を照明する。
【0112】
また、CCDケーブル166はその後端が図示しない駆動回路及び映像信号処理回路を内蔵したビデオプロセッサ(或いはカメラコントロールユニット)に接続され、照明された観察対象25を対物レンズ162を介して撮像する。
【0113】
この場合、対物レンズ162は開口数が大きく、高倍率で像を結ぶため、対物レンズ162の焦点位置の観察点26付近のみにフォーカスした画像を撮像することができる。
【0114】
その他の構成は図4(A)や図5で説明したものと同様である。本実施の形態によれば、特に2次元走査手段を有しない場合でも、観察対象25側を染色して、高倍率の観察手段を用いることにより、第1の実施の形態等における2次元走査を行う光走査手段を備えた光走査プローブ5を深さ方向を走査した場合と同様に高倍率の観察画像を得ることができる。
なお、上述した各実施の形態等を部分的に組み合わせて形成される実施の形態等も本発明に属する。
【0115】
[付記]
1.体腔内に挿入される光プローブと、
被検部に光を照射するための光を発生する光源と、
光を被検部に集光して照射する集光手段と、
集光手段によって被検部を集光手段の光軸方向と直交する方向に走査する光走査手段と、
被検部からの戻り光を検出する光検出手段と、
集光手段と走査手段を内側に収納する外筒部と、
集光手段の光軸方向または光軸方向と直交する方向のうちの少なくとも1方向に沿って集光手段と走査手段を外筒部に対して移動させる移動手段と、
移動手段の基準位置を外筒部内に固定する移動手段の基準位置固定手段と、
を有することを特徴とする光走査プローブ装置。
【0116】
1a.付記1において、前記移動手段に動力を伝達する伝達手段を有する。
1b.付記1において、前記移動手段を駆動する移動手段の駆動手段を有する。
1.1.付記1において、集光手段と光走査手段を含む光プローブ先端ユニットが、前記移動手段に接続され、該移動手段が、光プローブ先端付近において前記基準位置固定手段に接続されている。
【0117】
1.2.付記1において、前記基準位置固定手段が、光プローブの根元側の内視鏡チャンネルに挿入しない部分に設けてある。
1.3.付記1において、前記基準位置固定手段が、基準位置を可変する可変機構を有する。
1.4.付記1において、前記基準位置固定手段が、外筒部に設けている。
1.5.付記1において、前記基準位置固定手段が、外筒部と独立に設けている。
【0118】
1.5.1.付記1.5において、前記基準位置固定手段に封入する流体の通路が、移動手段に封入する流体の通路と独立に設けられている。
1.6.付記1において、前記基準位置固定手段が、拡張することにより固定する機構である。
1.6.1付記1.6において、前記基準位置固定手段が、気密が保持された弾性体で構成され、その弾性体内部に封入された流体の圧力を制御することにより内視鏡チャンネル内に固定される機構である。
【0119】
1.7.付記1において、前記基準位置固定手段が、位置決め手段と付勢手段からなる。
1.7.1.付記1.7において、前記基準位置固定手段が、光プローブ先端部付近に設けられた位置決め手段と、
光プローブ先端部付近または光プローブの根元側の内視鏡チャンネルに挿入しない部分に設けられた付勢手段とからなる。
【0120】
1.7.2.付記1.7において、前記基準位置固定手段が、光プローブの根元側の内視鏡チャンネルに挿入しない部分に設けられた位置決め手段と、
光プローブ先端部付近または光プローブの根元側の内視鏡チャンネルに挿入しない部分に設けられた付勢手段とからなる。
【0121】
1.7.3.付記1.7において、位置決め手段が、位置決め位置を可変にする機構を有する。
1.7.4.付記1.7において、付勢手段が、外筒部に設けられている。
1.7.5.付記1.7において、付勢手段が、外筒部と独立に設けられている。
1.7.6.付記1.7において、位置決め手段が、テーパ部を持つ基材である。
1.7.7.付記1.7において、付勢手段が、気密が保持された弾性体である。
1.7.8.付記1において、付勢手段が、光プローブの根元側の内視鏡チャンネルに挿入しない部分に設けられた弾性体により、光プローブを長手方向に押し付ける機構である。
【0122】
1.8.付記1において、動力伝達手段が、光プローブ内に封入した流体であり、
光プローブ先端位置の移動手段が、気密が保持された弾性体であり、
駆動手段が、弾性体内に封入した流体の圧力の可変機構であり、
駆動手段により動力伝達手段の圧力を制御して光プローブの先端位置の移動手段を伸縮させることにより、光プローブ先端部付近または光プローブの長手方向に移動させることを特徴とする。
【0123】
1.8.1.付記1.8において、光プローブ先端位置の移動手段が、プローブの長手方向のみに伸縮する特性を持つ弾性体である。
1.9.付記1において、外筒部が、光プローブの集光手段の前方に透明な窓を有する。
1.9.1.付記1.9において、外筒部が、光プローブの回転防止用の回り止め機構を有する。
【0124】
1.10.付記1において、電気信号の伝達手段と導光手段であるファイバを挿通する、動力伝達手段である流体を封入した筒体内に流体の封止手段がある。
1.10.1.付記1.10において、動力伝達手段である流体の封止手段が、メッキを施したファイバに対して半田された部品である。
1.11.付記1において、流体通路の接続コネクタが、ファイバ用コネクタとリード線用コネクタの筐体部と流体通路用の筒体を介して設置している。
【0125】
1.12.付記1において、外筒部が内視鏡の先端部と一体である。
1.12.1.付記1.12において、内視鏡の先端部に取り付けられた外筒部が着脱可能である。
2.体腔内に挿入される光プローブと、
被検部に光を照射するための光を発生する光源と、
光を被検部に集光して照射する集光手段と、
集光手段によって被検部を集光手段の光軸方向と直交する方向に走査する光走査手段と、
被検部からの戻り光を検出する光検出手段と、
集光手段と走査手段を内側に収納する外筒部と、
集光手段の光軸方向または光軸方向と直交する方向のうちの少なくとも1方向に沿って集光手段と走査手段を外筒部に対して移動させる移動手段と、
移動手段の基準位置を光プローブが挿通している管内に対して固定する移動手段の基準位置固定手段と、
を有することを特徴とする光走査プローブ装置。
【0126】
2a.付記2において、前記移動手段に動力伝達手段を有する。
2b.付記2において、前記移動手段を駆動する移動手段の駆動手段を有する。
2.1.付記2において、集光手段と光走査手段を含む光プローブ先端ユニットが、前記移動手段に接続され、該移動手段が、光プローブ先端部付近において移動手段の基準位置固定手段に接続されている。
2.2.付記2において、前記基準位置固定手段が、基準位置を可変する可変機構を有する。
【0127】
2.3.付記2において、外筒部が、光プローブ先端部付近からの着脱可能な機構を有する。
2.4.付記2において、前記基準位置固定手段が、外筒部と独立に設けてある。
2.4.1.付記2.4において、前記基準位置固定手段が、基準位置を外筒部内に対して固定する機能を有する。
2.4.2.付記2.4において、外筒部が、基準位置を固定する範囲にスリットを有する。
【0128】
2.5.付記2において、前記基準位置固定手段が、拡張することにより固定する機構である。
2.6.付記2において、前記基準位置固定手段が、位置決め手段と付勢手段からなる。
2.6.1.付記2.6において、前記基準位置固定手段が、光プローブ先端部付近に設けられた位置決め手段と、
光プローブ先端部付近または光プローブの根元側の根元側の内視鏡チャンネルに挿入しない部分に設けられた付勢手段とからなる。
【0129】
2.6.2.付記2.6において、位置決め手段が、位置決め位置を可変にする機構を有する。
2.6.3.付記2.6において、付勢手段が、外筒部に設けられている。
2.6.4.付記2.6において、付勢手段が、外筒部と独立に設けられている。
2.6.4.1.付記2.6.4において、付勢手段が、内視鏡の先端部と一体である。
2.6.5.付記2.6において、位置決め手段が、テーパ部を持つ基材である。
2.6.6.付記2.6において、付勢手段が、気密が保持された弾性体である。
2.6.7.付記2.6において、付勢手段が、光プローブの根元側の内視鏡チャンネルに挿入しない部部に設けられた弾性体である。
2.6.8.付記2.6において、位置決め手段が、内視鏡チャンネル内と一体である。
【0130】
2.7.付記2において、動力伝達手段が、光プローブ内に封入した流体であり、光プローブ先端位置の移動手段、気密が保持された弾性体であり、駆動手段が、弾性体内に封入した流体の圧力の可変機構であり、駆動手段により動力伝達手段の圧力を制御して光プローブの先端位置の移動手段を伸縮させることにより、光プローブ先端部付近を光プローブの長手方向に移動させることを特徴とする。
2.8.付記2において、外筒部が、光プローブの集光手段の前方に透明な窓を有する。
【0131】
3.体腔内に挿入される光走査プローブと、
被検部に光を照射するための光を発生する光源と、
光を被検部に集光して照射する高倍率の集光手段と、
被検部からの戻り光を検出する光検出手段と、
集光手段と走査手段を内側に収納する外筒部と、
集光手段の光軸方向または光軸方向と直交する方向のうちの少なくとも1方向に沿って集光手段を外筒部に対して移動させる移動手段と、
移動手段の基準位置を外筒部内に固定する移動手段の基準位置固定手段と、
を有することを特徴とする光走査プローブ装置。
【0132】
【発明の効果】
以上説明したように本発明によれば、体腔内に挿入される光プローブと、
被検部に光を照射するための光を発生する光源と、
光を被検部に集光して照射する集光手段と、
集光手段によって被検部を集光手段の光軸方向と直交する方向に走査する光走査手段と、
被検部からの戻り光を検出する光検出手段と、
集光手段と走査手段を内側に収納する外筒部と、
集光手段の光軸方向または光軸方向と直交する方向のうちの少なくとも1方向に沿って集光手段と走査手段を外筒部に対して移動させる移動手段と、
移動手段の基準位置を外筒部内に固定する移動手段の基準位置固定手段と、
を具備しているので、被検部に外筒部の先端等を接触させて位置決めした状態からさらに移動手段によって集光手段と光走査手段を外筒部から移動して固定することにより、所望とする部分に集光手段をフォーカスさせて光走査画像を得られる。
【図面の簡単な説明】
【図1】本発明の第1の実施の形態の光走査プローブ装置の全体構成図。
【図2】内視鏡のチャンネル内に挿通される光走査プローブを示す図。
【図3】図2の先端付近を拡大して示す図。
【図4】光走査プローブの先端側の構造を示す図。
【図5】変形例における光走査プローブの先端側の構造を示す断面図。
【図6】光走査プローブの手元側コネクタ付近の構造を示す図。
【図7】本発明の第2の実施の形態における側視タイプの光走査プローブの先端側の構造を示す断面図。
【図8】光走査プローブの手元側における付勢手段により固定する構造を示す断面図。
【図9】変形例における光走査プローブの先端側の構造を示す図。
【図10】第2変形例における光走査プローブの先端側の構造を示す図。
【図11】本発明の第3の実施の形態における光走査プローブの先端側の構造を示す断面図。
【図12】光走査プローブの後端側の構造を示す断面図。
【図13】変形例における外筒を取り外し可能に固定する固定機構を示す図。
【図14】内視鏡のチャンネル側に光走査プローブを固定する固定機構を示す図。
【図15】
変形例における光走査プローブの先端側の構造を示す図。
【図16】
図15における外筒の構造を示す断面図。
【図17】
本発明の第4の実施の形態における光走査プローブの先端側の構造を示す断面図
。
【符号の説明】
60…光走査プローブ装置
1…低コヒーレンズ光源
2…光ディテクタ
5…光走査プローブ
6,7,9,10,13…光ファイバ
8…光カプラ
18…光路長調節手段
21…PC
22…光走査駆動手段
27…集光レンズ(対物レンズ)
28…光走査手段
30…対物ユニット
41…シース
42…内視鏡
43…チャンネル
50…外筒
51…先端枠体
52…弾性筒体
53…バルーン
54…流体通路
55…流体(加圧空気)
56…スイッチ
59…内側プローブユニット
Claims (1)
- 体腔内に挿入される光プローブと、
被検部に光を照射するための光を発生する光源と、
光を被検部に集光して照射する集光手段と、
集光手段によって被検部を集光手段の光軸方向と直交する方向に走査する光走査手段と、
被検部からの戻り光を検出する光検出手段と、
集光手段と走査手段を内側に収納する外筒部と、
集光手段の光軸方向または光軸方向と直交する方向のうちの少なくとも1方向に沿って集光手段と走査手段を外筒部に対して移動させる移動手段と、
移動手段の基準位置を外筒部内に固定する移動手段の基準位置固定手段と、
を有することを特徴とする光走査プローブ装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003105733A JP4402364B2 (ja) | 2003-04-09 | 2003-04-09 | 光走査プローブ装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003105733A JP4402364B2 (ja) | 2003-04-09 | 2003-04-09 | 光走査プローブ装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2004305586A true JP2004305586A (ja) | 2004-11-04 |
| JP2004305586A5 JP2004305586A5 (ja) | 2006-06-08 |
| JP4402364B2 JP4402364B2 (ja) | 2010-01-20 |
Family
ID=33468153
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003105733A Expired - Fee Related JP4402364B2 (ja) | 2003-04-09 | 2003-04-09 | 光走査プローブ装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4402364B2 (ja) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010284261A (ja) * | 2009-06-10 | 2010-12-24 | Hoya Corp | 走査型光ファイバ |
| JP2011508888A (ja) * | 2008-01-04 | 2011-03-17 | コーニンクレッカ フィリップス エレクトロニクス エヌ ヴィ | 光プローブ |
| JP2011147705A (ja) * | 2010-01-25 | 2011-08-04 | Konica Minolta Opto Inc | 診断補助装置、光プローブ、及び該診断補助装置の作動方法 |
| US20110292195A1 (en) * | 2010-06-01 | 2011-12-01 | Jan Dahmen | Visual field apparatus for an endoscope |
| JP2012000364A (ja) * | 2010-06-21 | 2012-01-05 | Hoya Corp | 走査型光ファイバ |
| JP2014525602A (ja) * | 2011-08-24 | 2014-09-29 | アンジェロ トルトラ | 外科技能訓練のためのアプリケーション及び方法 |
| US20220221665A1 (en) * | 2021-01-12 | 2022-07-14 | Hi Llc | Devices, systems, and methods with a piezoelectric-driven light intensity modulator |
| CN118771579A (zh) * | 2024-08-06 | 2024-10-15 | 江苏恒富新材料科技有限公司 | 一种木浆海绵母液脱硫装置及其制备方法 |
-
2003
- 2003-04-09 JP JP2003105733A patent/JP4402364B2/ja not_active Expired - Fee Related
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011508888A (ja) * | 2008-01-04 | 2011-03-17 | コーニンクレッカ フィリップス エレクトロニクス エヌ ヴィ | 光プローブ |
| US9131845B2 (en) | 2008-01-04 | 2015-09-15 | Koninklijke Philips N.V. | Optical probe |
| JP2010284261A (ja) * | 2009-06-10 | 2010-12-24 | Hoya Corp | 走査型光ファイバ |
| JP2011147705A (ja) * | 2010-01-25 | 2011-08-04 | Konica Minolta Opto Inc | 診断補助装置、光プローブ、及び該診断補助装置の作動方法 |
| US20110292195A1 (en) * | 2010-06-01 | 2011-12-01 | Jan Dahmen | Visual field apparatus for an endoscope |
| US9625700B2 (en) * | 2010-06-01 | 2017-04-18 | Karl Storz Gmbh & Co. Kg | Visual field apparatus and image transmission apparatus for an endoscope |
| JP2012000364A (ja) * | 2010-06-21 | 2012-01-05 | Hoya Corp | 走査型光ファイバ |
| JP2014525602A (ja) * | 2011-08-24 | 2014-09-29 | アンジェロ トルトラ | 外科技能訓練のためのアプリケーション及び方法 |
| US20220221665A1 (en) * | 2021-01-12 | 2022-07-14 | Hi Llc | Devices, systems, and methods with a piezoelectric-driven light intensity modulator |
| US11803018B2 (en) * | 2021-01-12 | 2023-10-31 | Hi Llc | Devices, systems, and methods with a piezoelectric-driven light intensity modulator |
| CN118771579A (zh) * | 2024-08-06 | 2024-10-15 | 江苏恒富新材料科技有限公司 | 一种木浆海绵母液脱硫装置及其制备方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4402364B2 (ja) | 2010-01-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7158234B2 (en) | Optical scanning observation apparatus | |
| US6797931B2 (en) | Light scanning probe apparatus using light of low coherence including a positioning mechanism | |
| US6327493B1 (en) | Light scanning devices of a water-tight structure to be inserted into a body cavity to obtain optical information on inside of a biological tissue | |
| EP2022387B1 (en) | Endoscope and endoscope system | |
| US5188093A (en) | Portable arthroscope with periscope optics | |
| JP5030507B2 (ja) | 内視鏡の先端フードとフード付き内視鏡 | |
| JP4789922B2 (ja) | 前方走査撮像光ファイバ検出器 | |
| JP2005121947A (ja) | 対物レンズ挿入具及び顕微鏡並びに顕微鏡システム | |
| JP2007029603A (ja) | 光診断治療装置 | |
| EP1524542B1 (en) | Objective lens insertion tool & objective optical system attachment device | |
| KR102448681B1 (ko) | 카메라 드레이프 | |
| JP4402364B2 (ja) | 光走査プローブ装置 | |
| JP2001327460A (ja) | 内視鏡装置 | |
| JP3318295B2 (ja) | 光断層イメージング装置 | |
| JP2004298503A (ja) | 歯科検査用光イメージング装置 | |
| JP2006015134A (ja) | 光走査装置 | |
| JP5046981B2 (ja) | 内視鏡用アタッチメント | |
| JP2004159924A (ja) | 内視鏡 | |
| JP3650364B2 (ja) | 光走査プローブ装置 | |
| JP2003290133A (ja) | 光イメージング装置 | |
| JP4996153B2 (ja) | 拡大観察用内視鏡装置 | |
| JP2004065965A (ja) | 光走査プローブ装置 | |
| JP3003961B2 (ja) | 内視鏡 | |
| JP2009219514A (ja) | 接触型拡大観察内視鏡 | |
| JP4827546B2 (ja) | 共焦点内視鏡装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20060405 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060405 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20090311 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090707 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090903 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20091006 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20091029 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121106 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131106 Year of fee payment: 4 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |