JP2004355145A - 車両制御装置 - Google Patents
車両制御装置 Download PDFInfo
- Publication number
- JP2004355145A JP2004355145A JP2003149710A JP2003149710A JP2004355145A JP 2004355145 A JP2004355145 A JP 2004355145A JP 2003149710 A JP2003149710 A JP 2003149710A JP 2003149710 A JP2003149710 A JP 2003149710A JP 2004355145 A JP2004355145 A JP 2004355145A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- control device
- speed
- gate
- control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images


Landscapes
- Steering Control In Accordance With Driving Conditions (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Traffic Control Systems (AREA)
Abstract
【課題】特定施設付近(ETC料金所)で適切な走行状態での走行を可能とし、ゲートの円滑な通過を可能とすること。
【解決手段】ETC料金所に接近すると、車両協調を開始し、指定速度Vでの走行が行えるよう、エンジンECU3によってオートマチックトランスミッション4、エンジンスロットル5、ブレーキ制御部6を制御して、車両の速度を制御する。そして、利用者が故意にマニュアル料金所19、20へ進入した場合、又はブレーキが踏まれた場合、又は料金精算が終了してゲートを通過した場合には、車両協調を解除する。また、ナビゲーション装置2に備えられる報知装置によって車両協調の開始と解除の旨を利用者に報知する。
【選択図】 図1
【解決手段】ETC料金所に接近すると、車両協調を開始し、指定速度Vでの走行が行えるよう、エンジンECU3によってオートマチックトランスミッション4、エンジンスロットル5、ブレーキ制御部6を制御して、車両の速度を制御する。そして、利用者が故意にマニュアル料金所19、20へ進入した場合、又はブレーキが踏まれた場合、又は料金精算が終了してゲートを通過した場合には、車両協調を解除する。また、ナビゲーション装置2に備えられる報知装置によって車両協調の開始と解除の旨を利用者に報知する。
【選択図】 図1
Description
【0001】
【発明の属する技術分野】
本発明は、特定施設における車両の自動走行制御に関する。
【0002】
【従来技術】
現在、有料道路や駐車場の料金支払いシステムによる料金の支払い等、所用を車両に乗ったまま済ませることが可能である。また、近年では自動料金収受システム(Electric Toll Collection System以下、ETCと呼ぶ。)のように特定の施設と専用車載機とが通信を行うことにより、車両を停止させることなく、自動で所用を済ませることが可能となっている。その利用方法は、通信可能な専用装置を車両に搭載し、通信アンテナの設置された専用ゲートへ進入すると、ゲート到達前に専用装置と通信アンテナ間でのDSRC(Dedicated Short Range Communication)通信によって、料金の精算等の所用が処理され、処理が正常に終了した後、ゲートが開き、停止せずにゲートを通過するものである。ところが、このような特定施設は高速道路の料金所におけるETC専用レーン等のように、特定施設ごとにその利用可能場所が少々異なっていたりする。そのため、利用者にとって走行操作を行うと共に移動に伴う的確な情報を探すことは大変困難なものである。そこで、特定施設を利用する場合に、その特定施設内の移動を的確な情報により案内することができる移動体案内システム及び移動体案内装置がある(例えば、特許文献1。)。
【0003】
【特許文献1】
特開2002−163794号公報([0076]、図1)。
【0004】
【発明が解決しようとする課題】
しかし、上記特許文献1に記載の移動体案内システムでは、特定施設内の移動に伴った情報を認識し易く提供しているが、特定施設の利用に伴う車両操作をどのように行えばよいのかまでは案内されない。そのため、利用者はどのようなスピードで走行したらよいのか、正常に処理が終了したのか、特定施設のゲートはいつ開くのか等が分かり難く、利用者が不安を覚えたり、戸惑いを感じる場合があり、延いては後続車に迷惑を及ぼす場合もある。
【0005】
本発明は上記問題点に鑑みたもので、特定施設付近において適切な走行状態で走行し、ゲートの円滑な通過を可能とする車両の走行制御装置を提供することを目的とする。
【0006】
【課題を解決するための手段】
本発明は上記目的を達成するために、請求項1に記載の発明では、車両を停止することなく所用が済ませることが可能な特定施設において、検出手段によって特定施設付近に存在する所定の領域へ差し掛かったことを検出し、検出された場合、制御手段によって自動で車両の走行状態を制御することを特徴とする。従って、車両が特定施設付近に接近した際に、車両の走行状態の制御が開始されることにより、適切な走行状態での走行、及びゲートの円滑な通過が可能となるよう制御することが可能となる。
【0007】
また、請求項2に記載の発明では、指定手段によって、所定領域から特定施設通過までの走行状態を指定可能とし、制御手段は指定した走行状態を目標として車両の走行状態を制御することを特徴とする。つまり、適切な走行状態を指定すれば、適切な走行状態を目標に制御することが可能となり、より快適且つ円滑なゲートの通過を可能とする。
【0008】
更に、請求項3に記載の発明によれば、外部と通信可能な通信手段によって、走行状態に関する情報を受信すると、指定手段により受信した情報を基に走行状態をしていすることを特徴とする。これにより、走行場所周辺や特別施設の情報発信源から情報を得て、その特別施設ごとの状況に適応した自動制御が可能となる。
【0009】
また、請求項4に記載の発明において、指定手段によって指定する走行状態を、所定条件内であれば任意に設定可能とする設定手段を備えることを特徴とする。即ち、設定手段より利用者が任意に走行状態を指定することによって、より快適な走行を実現し、且つ円滑なゲートの通過を可能とする所定条件を満足することが可能となる。
【0010】
そして、請求項5に記載の発明では、制御手段は解除手段により自動制御を解除可能とすることを特徴とする。これにより、他車との関係や利用者の都合によって、自動制御が必要ない場合には、自動制御の解除が可能となる。
【0011】
更に、請求項6に記載の発明によれば、特定施設はETC関連施設、駐車場、ドライブスルーを含むため、車両を停止することなく料金支払い等の所用を済ませることが可能な特定施設にて、適切な走行状態で特定施設へ接近し、円滑に特定施設を通過するよう制御することが可能となる。
【0012】
また、請求項7に記載の発明によれば、車両を停止することなく有料道路の通行料金支払いを可能とするETC料金所において、検出手段によりETC料金所の所定距離手前へ車両が到達したことを検出すると、制御手段によりETCゲートを正常に通過可能とする走行状態に車両の走行状態を自動制御することを特徴とする。従って、車両がETC料金所付近に接近した際に、車両の走行状態の制御が開始されることにより、適切な走行状態での走行、及びゲートの円滑な通過が可能となるよう制御することが可能となる。
【0013】
そして、請求項8に記載の発明では、ETC料金所に関連して備えられたガントリに取り付けられているアンテナと車両との通信を可能とする距離が請求項7における所定距離手前であることを特徴とする。即ち、車両がETC料金所付近に備えられたガントリへ接近し、ガントリに取り付けられているアンテナとの通信が可能になると、制御手段によって走行状態の制御が開始される。よって、車両がETC料金所付近で料金精算のために通信を開始すると、走行制御が開始され、適切な走行状態でETC料金所を通過することが可能となる。
【0014】
更に、請求項9に記載の発明において、少なくとも車両の走行速度、及び/又は操舵を制御手段にて制御することを特徴とするため、車両は適切な速度又は適切な進行方向にてETC料金所を通過することが可能となる。
【0015】
【発明の実施の形態】
以下、本発明の特定施設としてETCを例に、本実施の形態に係る車両制御装置について、図1乃至図4を参照しながら説明する。
【0016】
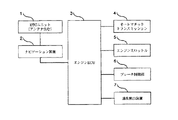
図1は本実施形態の車両制御装置の全体構成を示すブロック図である。車両制御装置は、ETCユニット1、ナビゲーション装置2、エンジンECU3、オートマチックトランスミッション4、エンジンスロットル5、ブレーキ制御部6、速度検出装置7より構成されている。ETCユニット1は、ETC料金所(特定施設)とDSRC通信にて情報の送受信を可能にするアンテナや料金支払いの際に使用されるICカードのインターフェース等によって構成され、ナビゲーション装置2と接続される。ナビゲーション装置2(本発明における検出手段に相当する)は周知のナビゲーション装置と同様に、位置検出器、地図データ入力装置、制御回路、報知装置等(何れも図示せず)によって構成され、ETCユニット1からの情報及びナビゲーション装置2自身が取得可能な情報を基に、様々な判断及び利用者への報知を行う。
【0017】
エンジンECU3(本発明における制御手段に相当する)は従来のエンジンECUと同様に構成され、ナビゲーション装置2からの指示信号を受けて車両の走行制御(速度制御)を行う。そして、オートマチックトランスミッション4、エンジンスロットル5、ブレーキ制御部6も従来のものと同様に構成され、エンジンECU3からの制御信号を受けて車両の挙動を制御する。速度検出装置7は一定時間内の車速パルスをカウントすることで車両の走行速度を制御する際に必要となる車両速度を検出するものである。
【0018】
上記構成において、車両制御装置は、ナビゲーション装置2によって地図データと現在位置を基にETCゲートのある料金所を通過する可能性があると判断した場合に、ナビゲーション装置2で算出されるマップマッチング後の現在位置からETCゲートまでの距離やETCユニット1からの受信開始信号の有無により、ETC料金所付近へさしかかったか否かを判定する。そして、ETC料金所付近にさしかかったと判定された場合、ETCゲートの通過又は、ブレーキが踏まれるまで車両協調による速度制御を繰り返す。
【0019】
次に、車両制御装置による上記処理動作を図2及び図3を参照して詳しく説明する。車両走行中、ナビゲーション装置2にて地図データと現在位置を基にETCゲートのある料金所を通過する可能性があると判断した場合、車両制御装置での処理が開始される。図2において、まずステップ(以下Sと略す。)100で、ETC料金所付近にさしかかったか否かを判定する。ここでの判定は、ナビゲーション装置2によって算出されるマップマッチング後の現在位置からETCゲートまでの距離が所定距離(例えば、10m以内)と一致した際、又はETCユニット1でETC施設の予告アンテナからのDSRC受信が確認された際(この場合、約200mゲート手前となる。)、又はETCゲート付近に設置された、予告アンテナとは異なるアンテナからのDSRC受信が確認された際(この場合、約4mゲート手前となる。)に、ETC料金所付近にさしかかったと判定される。
【0020】
S100での判定は、ETC料金所付近にさしかかるまで繰り返し行われ、ETC料金所付近にさしかかったと判定された場合(S100:Yes)、S101へ移行する。S101では、ETC料金所付近にさしかかったため、「ETCゲートまでの速度制御を開始します。」等のように車両協調(速度制御)が開始される旨を利用者に報知する。報知方法としては、ナビゲーション装置2が備える報知装置への表示や音声出力によって報知する。
【0021】
S101にて、利用者に車両協調開始の旨が報知されると、S102で車両協調処理(図3を用いて後述する。)が行われ、必要に応じた速度制御が行われる。次に、S103では接近中の料金ゲートがマニュアルであるか否かが判定される。ここで言う、マニュアルとはETCを利用しない有人の料金ゲートであり、「一般」とも呼ばれる。接近中の料金ゲートがマニュアルゲートであると判定された場合は(S103:Yes)、「「一般」ゲートへ接近中、速度制御を解除します。」等のように車両協調が解除される旨を利用者へ報知し(S106)、車両協調を解除する(S107)。即ち、利用者が故意にマニュアルゲートを通過しようとした場合等、ETCゲートがあるにも係らずマニュアルゲートを通過する場合には、車両協調が解除される。一方、接近中の料金ゲートがETCゲートであると判定された場合(S103:No)は、S104へ移行する。ここで、接近中の料金ゲートがマニュアルゲートか否かの判定は、ナビゲーション装置2にてマップマッチング後の現在位置が地図データにおける料金所ゲート手前まで来ていることが分かっているにも係らず、ETCゲート付近のアンテナからのDSRCの受信確認がなされない場合、接近中の料金ゲートがマニュアルゲートであると判定される。
【0022】
S104では、ETCゲートを通過したか否かをETCユニット1でのDSRC受信終了信号の有無によって判定する。ETCゲートを通過したと判定された場合は(S104:Yes)、車両協調の解除を利用者へ報知し(S106)、車両協調を解除する(S107)。一方、ETCゲートを通過していないと判定された場合は(S104:No)、S105へ移行し、ブレーキが踏まれたか否かを判定する。
【0023】
ブレーキが踏まれたことは、ブレーキ制御部6にて検出し、エンジンECU3を経由してナビゲーション装置2に通知される。尚、ここでエンジンECU3を介さず、直接ブレーキ制御部6とナビゲーション装置2を接続することも可能である。S105にて、ブレーキが踏まれていないと判定された場合は(S105:No)、S102へ戻り、車両協調処理及び上述の諸判定を繰り返す。一方、ブレーキが踏まれたと判定された場合は(S105:Yes)、車両協調の解除を利用者へ報知し(S106)、車両協調を解除する(S107)。
【0024】
尚、S106での報知方法は、S101と同様にナビゲーション装置2により行われる。
【0025】
次に、図3を用いて車両協調処理を説明する。まずS200で指定速度Vが前回指定された設定された速度ではなく、新たに指定されたか否かを判定する。ここで言う指定速度Vは、通信によって路肩の車両検出器やETCのガントリに設置された通信アンテナから送信する等、外部から順次指定される速度を意味する。尚、指定速度Vは、例えば、ETCシステムで推奨されている20kmをデフォルト値とする等、予めナビゲーション装置2に設定されており、外部から新たな指定が無い場合は、既定値を指定速度Vとする。また、予め指定速度Vを利用者によって設定可能としてもよい。その場合、例えば、ETCで推奨されている20kmを考慮して10kmから40km程度など設定可能速度に上限下限を設け、ETCゲートでの処理に支障がなく、且つ円滑に通過可能な速度の範囲内で設定できるようにする。
【0026】
S200で指定速度Vを受信した場合は(S200:Yes)、S206にて指定速度Vの設定を変更し、S201へ移行する。一方、新たに指定速度Vが指定されていない場合は(S200:No)は、予め設定されている速度(デフォルト値)を指定速度Vとし、S201へ移行する。
【0027】
S201では、車両速度vを算出する。算出方法は、速度検出装置7で車速パルスを検出し、一定時間内の車速パルスをカウントして算出するものである。S202では、車両速度vが指定速度Vと一致するか否かを判定する。車両速度vが指定速度Vと一致すると判定された場合は(S202:Yes)、現状の走行速度が適切であると判断できるため、エンジンECU3からの制御信号で速度を維持するよう制御が行われる。即ち、ブレーキ制御部6でブレーキをオフにし(S207)、オートマチックトランスミッション4のギア及びエンジンスロットル5を変更しないようにして(S208)、本車両協調処理を終了する。
【0028】
車両速度vが指定速度Vと一致しないと判定された場合は(S202:No)、車両速度vが指定速度Vと一致するよう加減速の制御が必要となるため、S203へ移行し、車両速度vが指定速度Vより速いか否かを判定する。車両速度vが指定速度Vよりも速いと判定された場合(S203:Yes)、減速が必要であると判断でき、減速するよう制御が行われる。
【0029】
例えば、新たに指定速度Vが指定されず(S200:No)、車両協調開始位置から料金所のゲートまでの距離Lの間に、車両協調開始時の速度v1から指定速度Vまでn回の車両協調処理で一定化速度Δvにて減速する(S203:Yes)と考える。加速度Δvが一定であり、n回で(v1−V)減速するため、車両協調開始位置から料金所のゲートまでの距離Lは数1のように表せ、車両協調処理の実行間隔をΔtとすると、実行回数nは数2のように表せる。
【0030】
【数1】
 【0031】
【0031】
【数2】
【0032】
従って、一回の車両協調処理(図2:S102)で行われる減速の加速度Δvは、数3のように表せる。
【0033】
【数3】
【0034】
これにより、S203で車両速度vが指定速度Vよりも速いと判定された場合(S203:Yes)、数3で求めた加速度Δvで減速するよう、エンジンECU3によって車速が制御される。即ち、エンジンECU3からの制御信号により、ブレーキ制御部6によってブレーキをかけ(S204)、エンジンスロットル5を閉じ、エンジンECU3内に記憶されているシフトスケジュールに従って必要に応じたギアのシフトダウンをオートマチックトランスミッション4にて行う(S205)。
【0035】
一方、S203で車両速度vが指定速度Vより遅いと判定された場合(S203:No)、加速が必要であると判断でき、加速するよう制御が行われる。例えば、上述の方法と同様の手順で加速用に求めた一定加速度Δvで加速するよう、エンジンECU3によって車速が制御される。即ち、エンジンECUからの制御信号により、ブレーキ制御部6によってブレーキをオフにし(S209)、エンジンスロットル5を開け、エンジンECU3内に記憶されているシフトスケジュールに従って必要に応じたギアのシフトアップをオートマチックトランスミッション4にて行う(S210)。
【0036】
ここで、本車両協調処理では、1回の処理で行われる加減速の加速度を一定としたり、線形的にしたりと様々な制御方法が考えられる。一定加速度での加減速を行う場合には、上述の通り制御開始位置からETCゲートまでの距離間に、車両速度vを指定速度Vにすることが可能な加速度が算出され、算出された加速度の制御が行われる。線形的な加速度での加減速を行う場合には、現在位置からETCゲートまでの距離間で車両速度vを指定速度Vにすることが可能な加速度での加減速が行われる。
【0037】
また、より滑らかな制御を行うために、ナビゲーション装置2でETCゲートまでの距離の変化率を求め、ETCゲートに近づくほど徐々に加速度を変化させてもよい。その場合は、距離によって指定速度Vを変更するようにしたり、通信によって逐次的に指定速度Vを変更して算出される加速度を変化させることが可能である。更に、ゲート通過中は一定速度を維持する等、様々な方法でETCゲートの開閉と車両通過のタイミングがずれ難く、遅すぎず、且つ搭乗者が恐怖心を感じない程度の速度に制御することが可能である。
【0038】
尚、本実施形態では車両協調が開始されると、車両がマニュアルゲートへ進入するか、ETCゲートを通過するか、利用者によってブレーキが踏まれるまで、車両協調処理が繰り返される。よって、車両協調処理が実行されている間の車速制御は完全に車両制御装置にて行われることとなり、利用者がアクセルを踏んでも、車両制御装置はアクセルによる加速を打ち消すように減速制御を行う。
【0039】
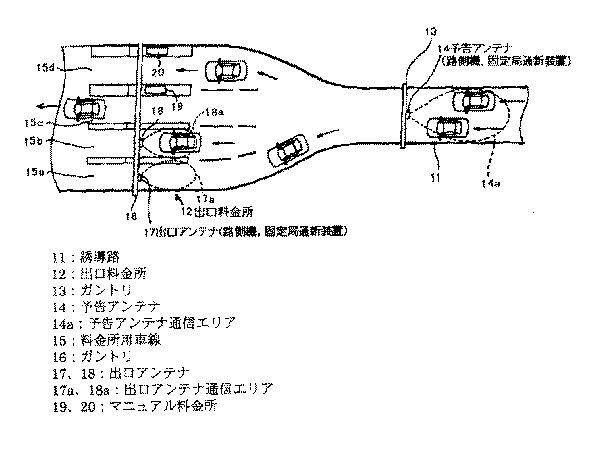
次に、車両が有料道路の出口料金所にさしかかった場合を例に、車両制御装置が行う上記処理及び動作を説明する。図4は出口料金所の構成を示す図である。図4では、出口料金所12へと続く誘導路11があり、出口料金所12が複数のレーンに渡って設置されている。誘導路11が複数のレーンに拡張する手前のガントリ13には予告アンテナ14が設置されており、予告アンテナ通信エリア14aの範囲に存在するETCユニット1搭載の車両と通信を行う。そして、料金所用車線15にまたがるガントリ16には、出口アンテナ17、18が設置され、出口アンテナ通信エリア17a、18aの範囲に存在する車両との通信で料金清算等が行われる。また、マニュアル料金所19、20では、人によって料金の清算が行われる。
【0040】
上記構成の出口料金所において、車両が指定速度Vを上回る速度で誘導路11から進入し、車両制御装置は予告アンテナ通信エリア14aからETCゲート通過まで車両速度の制御を行うものとする。このような状況において、まず、車両が予告アンテナ通信エリア14aに進入すると、本実施形態の車両制御装置は、ETCユニット1にてDSRC受信の開始を検知し、料金所付近にさしかかったと判定する(図2:S100:Yes)。ナビゲーション装置2により「車両協調を開始します。」と報知し(図2:S101)、車両協調が開始される(図2:S102)。予告アンテナ14は指定速度情報を送信しており、指定速度情報は予告アンテナ通信エリア14a内でETCユニット1から受信され(図3:S200:Yes)、ナビゲーション装置2へ送信される。そして、ナビゲーション装置2では受信した指定速度情報を新たな指定速度Vとして設定し(図3:S206)、車両速度vと比較する(図3:S202、S203)。車両速度vが指定速度Vを上回る速度で誘導路11から進入したため、減速が必要であると判断でき(図3:S203:Yes)、車両協調に反映するよう、エンジンECU3へ指示信号を送る。
【0041】
ガントリ13を通過した車両はその後、車両協調処理を繰り返すことによって料金所用車線15まで車両速度を制御しつつ、ガントリ16へ接近する。そして、車両が出口アンテナ通信エリア17a、18aに到達すると、出口アンテナ17、18とのDSRC通信によって、料金清算が行われる。料金精算が正常に終了すると、ガントリ13付近にある開閉式ゲートが開き、車両は停止することなくETC料金所を通過することができる。ETCゲートを通過すると(図2:S104)、ナビゲーション装置2にて「車両協調を解除します。」と報知し(図2:S106)、車両協調を解除する。
【0042】
一方、料金精算が正常に終了しなかった場合や開閉式ゲートが開かない場合は、出口アンテナ17、18とのDSRC通信によって、指定速度Vを0と指定する。車両制御装置は停車制御を行うと共に、利用者に「正常通行できません。停止します。」等の停止理由と停止する旨を報知する。
【0043】
尚、本実施形態では、車両制御装置が予告アンテナ通信エリア14aからETCゲート通過まで車両速度の制御を行ったが、出口アンテナ通信エリア17a、18aからETCゲート通過まで車両の速度制御を行い、運転者の補助的制御を行うようにしてもよい。また、ゲート内で指定速度Vをそれまでの指定速度Vから変更する場合や、停止指示(指定速度V=0)を行う場合は、出口アンテナ17、18によって新たに設定する指定速度Vが送信され、車載されたETCユニット1で受信される。また、出口アンテナ17、18との通信の有無とマップマッチング後の現在位置情報から、マニュアル料金所か否かの判定(図2:S103)が可能となる。
【0044】
以上、本実施形態の車両制御装置によれば、ETC料金所等の特定施設付近での適切な速度で走行できるよう、車両協調による速度制御を行い、ゲートの円滑な通過が可能となる。従って、ユーザ自身が走行速度を誤ってゲートにぶつかったり、ゲートの接近に不安感を覚えることなく、円滑にゲートを通過することが可能となる。尚、本実施形態において、ETCユニット1は通信手段に、ナビゲーション装置2は検出手段及び指定手段及び設定手段に、エンジンECU3は制御手段に相当する。そして、S100は検出手段に、S102は制御手段に、S103、S104、S105は解除手段に相当する。
【0045】
本実施形態では、特定の施設において速度を制御し、適切な速度でのゲート通過を可能としたが、制御対象は速度だけでなく、円滑な走行を支援する車両制御であれば操舵制御や他車との協調制御等を行ってもよい。また、本発明において、有料道路料金支払いだけでなく、駐車料金支払いやドライブスルーの支払いにおいても適応可能である。
【図面の簡単な説明】
【図1】本発明の一実施形態に係る車両制御装置の構成図である。
【図2】本発明の一実施形態に係る処理のフローチャートを示す図である。
【図3】図2で行われる車両協調処理のフローチャートを示す図である。
【図4】本発明の一実施形態の状況例として出口料金所を示す図である。
【符号の説明】
1・・・ETCユニット
2・・・ナビゲーション装置
3・・・エンジンECU
4・・・オートマチックトランスミッション
5・・・エンジンスロットル
6・・・ブレーキ制御部
7・・・速度検出装置
【発明の属する技術分野】
本発明は、特定施設における車両の自動走行制御に関する。
【0002】
【従来技術】
現在、有料道路や駐車場の料金支払いシステムによる料金の支払い等、所用を車両に乗ったまま済ませることが可能である。また、近年では自動料金収受システム(Electric Toll Collection System以下、ETCと呼ぶ。)のように特定の施設と専用車載機とが通信を行うことにより、車両を停止させることなく、自動で所用を済ませることが可能となっている。その利用方法は、通信可能な専用装置を車両に搭載し、通信アンテナの設置された専用ゲートへ進入すると、ゲート到達前に専用装置と通信アンテナ間でのDSRC(Dedicated Short Range Communication)通信によって、料金の精算等の所用が処理され、処理が正常に終了した後、ゲートが開き、停止せずにゲートを通過するものである。ところが、このような特定施設は高速道路の料金所におけるETC専用レーン等のように、特定施設ごとにその利用可能場所が少々異なっていたりする。そのため、利用者にとって走行操作を行うと共に移動に伴う的確な情報を探すことは大変困難なものである。そこで、特定施設を利用する場合に、その特定施設内の移動を的確な情報により案内することができる移動体案内システム及び移動体案内装置がある(例えば、特許文献1。)。
【0003】
【特許文献1】
特開2002−163794号公報([0076]、図1)。
【0004】
【発明が解決しようとする課題】
しかし、上記特許文献1に記載の移動体案内システムでは、特定施設内の移動に伴った情報を認識し易く提供しているが、特定施設の利用に伴う車両操作をどのように行えばよいのかまでは案内されない。そのため、利用者はどのようなスピードで走行したらよいのか、正常に処理が終了したのか、特定施設のゲートはいつ開くのか等が分かり難く、利用者が不安を覚えたり、戸惑いを感じる場合があり、延いては後続車に迷惑を及ぼす場合もある。
【0005】
本発明は上記問題点に鑑みたもので、特定施設付近において適切な走行状態で走行し、ゲートの円滑な通過を可能とする車両の走行制御装置を提供することを目的とする。
【0006】
【課題を解決するための手段】
本発明は上記目的を達成するために、請求項1に記載の発明では、車両を停止することなく所用が済ませることが可能な特定施設において、検出手段によって特定施設付近に存在する所定の領域へ差し掛かったことを検出し、検出された場合、制御手段によって自動で車両の走行状態を制御することを特徴とする。従って、車両が特定施設付近に接近した際に、車両の走行状態の制御が開始されることにより、適切な走行状態での走行、及びゲートの円滑な通過が可能となるよう制御することが可能となる。
【0007】
また、請求項2に記載の発明では、指定手段によって、所定領域から特定施設通過までの走行状態を指定可能とし、制御手段は指定した走行状態を目標として車両の走行状態を制御することを特徴とする。つまり、適切な走行状態を指定すれば、適切な走行状態を目標に制御することが可能となり、より快適且つ円滑なゲートの通過を可能とする。
【0008】
更に、請求項3に記載の発明によれば、外部と通信可能な通信手段によって、走行状態に関する情報を受信すると、指定手段により受信した情報を基に走行状態をしていすることを特徴とする。これにより、走行場所周辺や特別施設の情報発信源から情報を得て、その特別施設ごとの状況に適応した自動制御が可能となる。
【0009】
また、請求項4に記載の発明において、指定手段によって指定する走行状態を、所定条件内であれば任意に設定可能とする設定手段を備えることを特徴とする。即ち、設定手段より利用者が任意に走行状態を指定することによって、より快適な走行を実現し、且つ円滑なゲートの通過を可能とする所定条件を満足することが可能となる。
【0010】
そして、請求項5に記載の発明では、制御手段は解除手段により自動制御を解除可能とすることを特徴とする。これにより、他車との関係や利用者の都合によって、自動制御が必要ない場合には、自動制御の解除が可能となる。
【0011】
更に、請求項6に記載の発明によれば、特定施設はETC関連施設、駐車場、ドライブスルーを含むため、車両を停止することなく料金支払い等の所用を済ませることが可能な特定施設にて、適切な走行状態で特定施設へ接近し、円滑に特定施設を通過するよう制御することが可能となる。
【0012】
また、請求項7に記載の発明によれば、車両を停止することなく有料道路の通行料金支払いを可能とするETC料金所において、検出手段によりETC料金所の所定距離手前へ車両が到達したことを検出すると、制御手段によりETCゲートを正常に通過可能とする走行状態に車両の走行状態を自動制御することを特徴とする。従って、車両がETC料金所付近に接近した際に、車両の走行状態の制御が開始されることにより、適切な走行状態での走行、及びゲートの円滑な通過が可能となるよう制御することが可能となる。
【0013】
そして、請求項8に記載の発明では、ETC料金所に関連して備えられたガントリに取り付けられているアンテナと車両との通信を可能とする距離が請求項7における所定距離手前であることを特徴とする。即ち、車両がETC料金所付近に備えられたガントリへ接近し、ガントリに取り付けられているアンテナとの通信が可能になると、制御手段によって走行状態の制御が開始される。よって、車両がETC料金所付近で料金精算のために通信を開始すると、走行制御が開始され、適切な走行状態でETC料金所を通過することが可能となる。
【0014】
更に、請求項9に記載の発明において、少なくとも車両の走行速度、及び/又は操舵を制御手段にて制御することを特徴とするため、車両は適切な速度又は適切な進行方向にてETC料金所を通過することが可能となる。
【0015】
【発明の実施の形態】
以下、本発明の特定施設としてETCを例に、本実施の形態に係る車両制御装置について、図1乃至図4を参照しながら説明する。
【0016】
図1は本実施形態の車両制御装置の全体構成を示すブロック図である。車両制御装置は、ETCユニット1、ナビゲーション装置2、エンジンECU3、オートマチックトランスミッション4、エンジンスロットル5、ブレーキ制御部6、速度検出装置7より構成されている。ETCユニット1は、ETC料金所(特定施設)とDSRC通信にて情報の送受信を可能にするアンテナや料金支払いの際に使用されるICカードのインターフェース等によって構成され、ナビゲーション装置2と接続される。ナビゲーション装置2(本発明における検出手段に相当する)は周知のナビゲーション装置と同様に、位置検出器、地図データ入力装置、制御回路、報知装置等(何れも図示せず)によって構成され、ETCユニット1からの情報及びナビゲーション装置2自身が取得可能な情報を基に、様々な判断及び利用者への報知を行う。
【0017】
エンジンECU3(本発明における制御手段に相当する)は従来のエンジンECUと同様に構成され、ナビゲーション装置2からの指示信号を受けて車両の走行制御(速度制御)を行う。そして、オートマチックトランスミッション4、エンジンスロットル5、ブレーキ制御部6も従来のものと同様に構成され、エンジンECU3からの制御信号を受けて車両の挙動を制御する。速度検出装置7は一定時間内の車速パルスをカウントすることで車両の走行速度を制御する際に必要となる車両速度を検出するものである。
【0018】
上記構成において、車両制御装置は、ナビゲーション装置2によって地図データと現在位置を基にETCゲートのある料金所を通過する可能性があると判断した場合に、ナビゲーション装置2で算出されるマップマッチング後の現在位置からETCゲートまでの距離やETCユニット1からの受信開始信号の有無により、ETC料金所付近へさしかかったか否かを判定する。そして、ETC料金所付近にさしかかったと判定された場合、ETCゲートの通過又は、ブレーキが踏まれるまで車両協調による速度制御を繰り返す。
【0019】
次に、車両制御装置による上記処理動作を図2及び図3を参照して詳しく説明する。車両走行中、ナビゲーション装置2にて地図データと現在位置を基にETCゲートのある料金所を通過する可能性があると判断した場合、車両制御装置での処理が開始される。図2において、まずステップ(以下Sと略す。)100で、ETC料金所付近にさしかかったか否かを判定する。ここでの判定は、ナビゲーション装置2によって算出されるマップマッチング後の現在位置からETCゲートまでの距離が所定距離(例えば、10m以内)と一致した際、又はETCユニット1でETC施設の予告アンテナからのDSRC受信が確認された際(この場合、約200mゲート手前となる。)、又はETCゲート付近に設置された、予告アンテナとは異なるアンテナからのDSRC受信が確認された際(この場合、約4mゲート手前となる。)に、ETC料金所付近にさしかかったと判定される。
【0020】
S100での判定は、ETC料金所付近にさしかかるまで繰り返し行われ、ETC料金所付近にさしかかったと判定された場合(S100:Yes)、S101へ移行する。S101では、ETC料金所付近にさしかかったため、「ETCゲートまでの速度制御を開始します。」等のように車両協調(速度制御)が開始される旨を利用者に報知する。報知方法としては、ナビゲーション装置2が備える報知装置への表示や音声出力によって報知する。
【0021】
S101にて、利用者に車両協調開始の旨が報知されると、S102で車両協調処理(図3を用いて後述する。)が行われ、必要に応じた速度制御が行われる。次に、S103では接近中の料金ゲートがマニュアルであるか否かが判定される。ここで言う、マニュアルとはETCを利用しない有人の料金ゲートであり、「一般」とも呼ばれる。接近中の料金ゲートがマニュアルゲートであると判定された場合は(S103:Yes)、「「一般」ゲートへ接近中、速度制御を解除します。」等のように車両協調が解除される旨を利用者へ報知し(S106)、車両協調を解除する(S107)。即ち、利用者が故意にマニュアルゲートを通過しようとした場合等、ETCゲートがあるにも係らずマニュアルゲートを通過する場合には、車両協調が解除される。一方、接近中の料金ゲートがETCゲートであると判定された場合(S103:No)は、S104へ移行する。ここで、接近中の料金ゲートがマニュアルゲートか否かの判定は、ナビゲーション装置2にてマップマッチング後の現在位置が地図データにおける料金所ゲート手前まで来ていることが分かっているにも係らず、ETCゲート付近のアンテナからのDSRCの受信確認がなされない場合、接近中の料金ゲートがマニュアルゲートであると判定される。
【0022】
S104では、ETCゲートを通過したか否かをETCユニット1でのDSRC受信終了信号の有無によって判定する。ETCゲートを通過したと判定された場合は(S104:Yes)、車両協調の解除を利用者へ報知し(S106)、車両協調を解除する(S107)。一方、ETCゲートを通過していないと判定された場合は(S104:No)、S105へ移行し、ブレーキが踏まれたか否かを判定する。
【0023】
ブレーキが踏まれたことは、ブレーキ制御部6にて検出し、エンジンECU3を経由してナビゲーション装置2に通知される。尚、ここでエンジンECU3を介さず、直接ブレーキ制御部6とナビゲーション装置2を接続することも可能である。S105にて、ブレーキが踏まれていないと判定された場合は(S105:No)、S102へ戻り、車両協調処理及び上述の諸判定を繰り返す。一方、ブレーキが踏まれたと判定された場合は(S105:Yes)、車両協調の解除を利用者へ報知し(S106)、車両協調を解除する(S107)。
【0024】
尚、S106での報知方法は、S101と同様にナビゲーション装置2により行われる。
【0025】
次に、図3を用いて車両協調処理を説明する。まずS200で指定速度Vが前回指定された設定された速度ではなく、新たに指定されたか否かを判定する。ここで言う指定速度Vは、通信によって路肩の車両検出器やETCのガントリに設置された通信アンテナから送信する等、外部から順次指定される速度を意味する。尚、指定速度Vは、例えば、ETCシステムで推奨されている20kmをデフォルト値とする等、予めナビゲーション装置2に設定されており、外部から新たな指定が無い場合は、既定値を指定速度Vとする。また、予め指定速度Vを利用者によって設定可能としてもよい。その場合、例えば、ETCで推奨されている20kmを考慮して10kmから40km程度など設定可能速度に上限下限を設け、ETCゲートでの処理に支障がなく、且つ円滑に通過可能な速度の範囲内で設定できるようにする。
【0026】
S200で指定速度Vを受信した場合は(S200:Yes)、S206にて指定速度Vの設定を変更し、S201へ移行する。一方、新たに指定速度Vが指定されていない場合は(S200:No)は、予め設定されている速度(デフォルト値)を指定速度Vとし、S201へ移行する。
【0027】
S201では、車両速度vを算出する。算出方法は、速度検出装置7で車速パルスを検出し、一定時間内の車速パルスをカウントして算出するものである。S202では、車両速度vが指定速度Vと一致するか否かを判定する。車両速度vが指定速度Vと一致すると判定された場合は(S202:Yes)、現状の走行速度が適切であると判断できるため、エンジンECU3からの制御信号で速度を維持するよう制御が行われる。即ち、ブレーキ制御部6でブレーキをオフにし(S207)、オートマチックトランスミッション4のギア及びエンジンスロットル5を変更しないようにして(S208)、本車両協調処理を終了する。
【0028】
車両速度vが指定速度Vと一致しないと判定された場合は(S202:No)、車両速度vが指定速度Vと一致するよう加減速の制御が必要となるため、S203へ移行し、車両速度vが指定速度Vより速いか否かを判定する。車両速度vが指定速度Vよりも速いと判定された場合(S203:Yes)、減速が必要であると判断でき、減速するよう制御が行われる。
【0029】
例えば、新たに指定速度Vが指定されず(S200:No)、車両協調開始位置から料金所のゲートまでの距離Lの間に、車両協調開始時の速度v1から指定速度Vまでn回の車両協調処理で一定化速度Δvにて減速する(S203:Yes)と考える。加速度Δvが一定であり、n回で(v1−V)減速するため、車両協調開始位置から料金所のゲートまでの距離Lは数1のように表せ、車両協調処理の実行間隔をΔtとすると、実行回数nは数2のように表せる。
【0030】
【数1】
【数2】
従って、一回の車両協調処理(図2:S102)で行われる減速の加速度Δvは、数3のように表せる。
【0033】
【数3】
これにより、S203で車両速度vが指定速度Vよりも速いと判定された場合(S203:Yes)、数3で求めた加速度Δvで減速するよう、エンジンECU3によって車速が制御される。即ち、エンジンECU3からの制御信号により、ブレーキ制御部6によってブレーキをかけ(S204)、エンジンスロットル5を閉じ、エンジンECU3内に記憶されているシフトスケジュールに従って必要に応じたギアのシフトダウンをオートマチックトランスミッション4にて行う(S205)。
【0035】
一方、S203で車両速度vが指定速度Vより遅いと判定された場合(S203:No)、加速が必要であると判断でき、加速するよう制御が行われる。例えば、上述の方法と同様の手順で加速用に求めた一定加速度Δvで加速するよう、エンジンECU3によって車速が制御される。即ち、エンジンECUからの制御信号により、ブレーキ制御部6によってブレーキをオフにし(S209)、エンジンスロットル5を開け、エンジンECU3内に記憶されているシフトスケジュールに従って必要に応じたギアのシフトアップをオートマチックトランスミッション4にて行う(S210)。
【0036】
ここで、本車両協調処理では、1回の処理で行われる加減速の加速度を一定としたり、線形的にしたりと様々な制御方法が考えられる。一定加速度での加減速を行う場合には、上述の通り制御開始位置からETCゲートまでの距離間に、車両速度vを指定速度Vにすることが可能な加速度が算出され、算出された加速度の制御が行われる。線形的な加速度での加減速を行う場合には、現在位置からETCゲートまでの距離間で車両速度vを指定速度Vにすることが可能な加速度での加減速が行われる。
【0037】
また、より滑らかな制御を行うために、ナビゲーション装置2でETCゲートまでの距離の変化率を求め、ETCゲートに近づくほど徐々に加速度を変化させてもよい。その場合は、距離によって指定速度Vを変更するようにしたり、通信によって逐次的に指定速度Vを変更して算出される加速度を変化させることが可能である。更に、ゲート通過中は一定速度を維持する等、様々な方法でETCゲートの開閉と車両通過のタイミングがずれ難く、遅すぎず、且つ搭乗者が恐怖心を感じない程度の速度に制御することが可能である。
【0038】
尚、本実施形態では車両協調が開始されると、車両がマニュアルゲートへ進入するか、ETCゲートを通過するか、利用者によってブレーキが踏まれるまで、車両協調処理が繰り返される。よって、車両協調処理が実行されている間の車速制御は完全に車両制御装置にて行われることとなり、利用者がアクセルを踏んでも、車両制御装置はアクセルによる加速を打ち消すように減速制御を行う。
【0039】
次に、車両が有料道路の出口料金所にさしかかった場合を例に、車両制御装置が行う上記処理及び動作を説明する。図4は出口料金所の構成を示す図である。図4では、出口料金所12へと続く誘導路11があり、出口料金所12が複数のレーンに渡って設置されている。誘導路11が複数のレーンに拡張する手前のガントリ13には予告アンテナ14が設置されており、予告アンテナ通信エリア14aの範囲に存在するETCユニット1搭載の車両と通信を行う。そして、料金所用車線15にまたがるガントリ16には、出口アンテナ17、18が設置され、出口アンテナ通信エリア17a、18aの範囲に存在する車両との通信で料金清算等が行われる。また、マニュアル料金所19、20では、人によって料金の清算が行われる。
【0040】
上記構成の出口料金所において、車両が指定速度Vを上回る速度で誘導路11から進入し、車両制御装置は予告アンテナ通信エリア14aからETCゲート通過まで車両速度の制御を行うものとする。このような状況において、まず、車両が予告アンテナ通信エリア14aに進入すると、本実施形態の車両制御装置は、ETCユニット1にてDSRC受信の開始を検知し、料金所付近にさしかかったと判定する(図2:S100:Yes)。ナビゲーション装置2により「車両協調を開始します。」と報知し(図2:S101)、車両協調が開始される(図2:S102)。予告アンテナ14は指定速度情報を送信しており、指定速度情報は予告アンテナ通信エリア14a内でETCユニット1から受信され(図3:S200:Yes)、ナビゲーション装置2へ送信される。そして、ナビゲーション装置2では受信した指定速度情報を新たな指定速度Vとして設定し(図3:S206)、車両速度vと比較する(図3:S202、S203)。車両速度vが指定速度Vを上回る速度で誘導路11から進入したため、減速が必要であると判断でき(図3:S203:Yes)、車両協調に反映するよう、エンジンECU3へ指示信号を送る。
【0041】
ガントリ13を通過した車両はその後、車両協調処理を繰り返すことによって料金所用車線15まで車両速度を制御しつつ、ガントリ16へ接近する。そして、車両が出口アンテナ通信エリア17a、18aに到達すると、出口アンテナ17、18とのDSRC通信によって、料金清算が行われる。料金精算が正常に終了すると、ガントリ13付近にある開閉式ゲートが開き、車両は停止することなくETC料金所を通過することができる。ETCゲートを通過すると(図2:S104)、ナビゲーション装置2にて「車両協調を解除します。」と報知し(図2:S106)、車両協調を解除する。
【0042】
一方、料金精算が正常に終了しなかった場合や開閉式ゲートが開かない場合は、出口アンテナ17、18とのDSRC通信によって、指定速度Vを0と指定する。車両制御装置は停車制御を行うと共に、利用者に「正常通行できません。停止します。」等の停止理由と停止する旨を報知する。
【0043】
尚、本実施形態では、車両制御装置が予告アンテナ通信エリア14aからETCゲート通過まで車両速度の制御を行ったが、出口アンテナ通信エリア17a、18aからETCゲート通過まで車両の速度制御を行い、運転者の補助的制御を行うようにしてもよい。また、ゲート内で指定速度Vをそれまでの指定速度Vから変更する場合や、停止指示(指定速度V=0)を行う場合は、出口アンテナ17、18によって新たに設定する指定速度Vが送信され、車載されたETCユニット1で受信される。また、出口アンテナ17、18との通信の有無とマップマッチング後の現在位置情報から、マニュアル料金所か否かの判定(図2:S103)が可能となる。
【0044】
以上、本実施形態の車両制御装置によれば、ETC料金所等の特定施設付近での適切な速度で走行できるよう、車両協調による速度制御を行い、ゲートの円滑な通過が可能となる。従って、ユーザ自身が走行速度を誤ってゲートにぶつかったり、ゲートの接近に不安感を覚えることなく、円滑にゲートを通過することが可能となる。尚、本実施形態において、ETCユニット1は通信手段に、ナビゲーション装置2は検出手段及び指定手段及び設定手段に、エンジンECU3は制御手段に相当する。そして、S100は検出手段に、S102は制御手段に、S103、S104、S105は解除手段に相当する。
【0045】
本実施形態では、特定の施設において速度を制御し、適切な速度でのゲート通過を可能としたが、制御対象は速度だけでなく、円滑な走行を支援する車両制御であれば操舵制御や他車との協調制御等を行ってもよい。また、本発明において、有料道路料金支払いだけでなく、駐車料金支払いやドライブスルーの支払いにおいても適応可能である。
【図面の簡単な説明】
【図1】本発明の一実施形態に係る車両制御装置の構成図である。
【図2】本発明の一実施形態に係る処理のフローチャートを示す図である。
【図3】図2で行われる車両協調処理のフローチャートを示す図である。
【図4】本発明の一実施形態の状況例として出口料金所を示す図である。
【符号の説明】
1・・・ETCユニット
2・・・ナビゲーション装置
3・・・エンジンECU
4・・・オートマチックトランスミッション
5・・・エンジンスロットル
6・・・ブレーキ制御部
7・・・速度検出装置
Claims (9)
- 車両が停止することなく所用を済ませることが可能な特定施設において、
前記特定施設付近に存在する所定の領域へ車両が差し掛かったことを検出する検出手段と、
前記検出手段により車両が前記所定領域へ到達したと検出されると、車両の走行状態を自動で制御する制御手段とを備えることを特徴とする車両制御装置。 - 前記所定領域から前記特定施設を通過するまでの走行状態を指定する指定手段を備え、
前記制御手段は前記指定手段で指定した走行状態を目標に前記車両の走行状態を制御することを特徴とする請求項1に記載の車両制御装置。 - 外部との通信を可能にする通信手段を有し、
前記通信手段より走行状態に関する情報を受信した場合に、前記指定手段は受信した前記情報に基づき前記走行状態を指定することを特徴とする請求項2に記載の車両制御装置。 - 前記指定手段によって指定される前記走行状態を所定条件内で任意に設定可能とする設定手段を具備することを特徴とする請求項2に記載の車両制御装置。
- 前記制御手段による自動制御を解除する解除手段を備え、
前記解除手段により自動制御を解除可能とすることを特徴とする請求項1乃至4の何れか1つに記載の車両制御装置。 - 前記特定施設は少なくともETC関連施設、駐車場、ドライブスルーを含むことを特徴とする請求項1乃至5の何れか1つに記載の車両制御装置。
- 車両が停止することなく有料道路の通行料金支払いが可能なETC料金所において、
前記ETC料金所の所定距離手前へ車両が到達したことを検出する検出手段と、
前記検出手段によりETC料金所の所定距離手前へ到達したことを検出すると、ETCゲートを正常に通過可能な走行状態に車両の走行状態を自動で制御する制御手段とを備えることを特徴とする車両制御装置。 - 前記所定距離手前とは、ETC料金所に関連して備えられたガントリに取り付けられているアンテナと車両とが通信可能な距離であることを特徴とする請求項7に記載の車両制御装置。
- 前記制御手段は、少なくとも車両の速度及び/又は操舵を制御すること特徴とする請求項7又は8に記載の車両制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003149710A JP2004355145A (ja) | 2003-05-27 | 2003-05-27 | 車両制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003149710A JP2004355145A (ja) | 2003-05-27 | 2003-05-27 | 車両制御装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2004355145A true JP2004355145A (ja) | 2004-12-16 |
Family
ID=34045736
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003149710A Pending JP2004355145A (ja) | 2003-05-27 | 2003-05-27 | 車両制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2004355145A (ja) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011095989A (ja) * | 2009-10-29 | 2011-05-12 | Mitsubishi Electric Corp | 車両用制御装置 |
| FR3007724A1 (fr) * | 2013-06-26 | 2015-01-02 | Bosch Gmbh Robert | Systeme de commande de vehicule et systeme de peage pour un tel systeme de commande |
| WO2018037950A1 (ja) * | 2016-08-25 | 2018-03-01 | ソニー株式会社 | 車両の状態制御装置および方法、並びに車両 |
| WO2019016915A1 (ja) | 2017-07-20 | 2019-01-24 | 日産自動車株式会社 | 車両走行制御方法及び車両走行制御装置 |
| WO2019016917A1 (ja) | 2017-07-20 | 2019-01-24 | 日産自動車株式会社 | 車両走行制御方法及び車両走行制御装置 |
| CN110920597A (zh) * | 2018-09-17 | 2020-03-27 | 现代自动车株式会社 | 车辆控制装置、具有该装置的系统及其方法 |
| US11230287B2 (en) | 2019-03-12 | 2022-01-25 | Mitsubishi Electric Corporation | Vehicle control device |
-
2003
- 2003-05-27 JP JP2003149710A patent/JP2004355145A/ja active Pending
Cited By (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011095989A (ja) * | 2009-10-29 | 2011-05-12 | Mitsubishi Electric Corp | 車両用制御装置 |
| FR3007724A1 (fr) * | 2013-06-26 | 2015-01-02 | Bosch Gmbh Robert | Systeme de commande de vehicule et systeme de peage pour un tel systeme de commande |
| JP2015011718A (ja) * | 2013-06-26 | 2015-01-19 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツングRobert Bosch Gmbh | 車両制御システム、及び、車両制御システムを有する料金収受システム |
| WO2018037950A1 (ja) * | 2016-08-25 | 2018-03-01 | ソニー株式会社 | 車両の状態制御装置および方法、並びに車両 |
| US11409283B2 (en) | 2016-08-25 | 2022-08-09 | Sony Corporation | Vehicle state control apparatus, vehicle state control method, and vehicle |
| CN109564731B (zh) * | 2016-08-25 | 2022-07-08 | 索尼公司 | 车辆状态控制装置、车辆状态控制方法和车辆 |
| CN109564731A (zh) * | 2016-08-25 | 2019-04-02 | 索尼公司 | 车辆状态控制装置、车辆状态控制方法和车辆 |
| JPWO2018037950A1 (ja) * | 2016-08-25 | 2019-06-20 | ソニー株式会社 | 車両の状態制御装置および方法、並びに車両 |
| EP3506236A4 (en) * | 2016-08-25 | 2019-09-04 | Sony Corporation | VEHICLE STATE CONTROL DEVICE AND METHOD AND VEHICLE |
| JP7006601B2 (ja) | 2016-08-25 | 2022-01-24 | ソニーグループ株式会社 | 車両の状態制御装置および方法、並びに車両 |
| KR20200016386A (ko) | 2017-07-20 | 2020-02-14 | 닛산 지도우샤 가부시키가이샤 | 차량 주행 제어 방법 및 차량 주행 제어 장치 |
| RU2725836C1 (ru) * | 2017-07-20 | 2020-07-06 | Ниссан Мотор Ко., Лтд. | Способ управления движением транспортного средства и устройство управления движением транспортного средства |
| US11077879B2 (en) | 2017-07-20 | 2021-08-03 | Nissan Motor Co., Ltd. | Vehicle travel control method and vehicle travel control device |
| US11155274B2 (en) | 2017-07-20 | 2021-10-26 | Nissan Motor Co., Ltd. | Vehicle travel control method and vehicle travel control device |
| KR20200014922A (ko) | 2017-07-20 | 2020-02-11 | 닛산 지도우샤 가부시키가이샤 | 차량 주행 제어 방법 및 차량 주행 제어 장치 |
| WO2019016917A1 (ja) | 2017-07-20 | 2019-01-24 | 日産自動車株式会社 | 車両走行制御方法及び車両走行制御装置 |
| WO2019016915A1 (ja) | 2017-07-20 | 2019-01-24 | 日産自動車株式会社 | 車両走行制御方法及び車両走行制御装置 |
| CN110920597A (zh) * | 2018-09-17 | 2020-03-27 | 现代自动车株式会社 | 车辆控制装置、具有该装置的系统及其方法 |
| KR20200036072A (ko) * | 2018-09-17 | 2020-04-07 | 현대자동차주식회사 | 차량 제어 장치, 그를 포함한 시스템 및 그 방법 |
| KR102452557B1 (ko) * | 2018-09-17 | 2022-10-07 | 현대자동차주식회사 | 차량 제어 장치, 그를 포함한 시스템 및 그 방법 |
| US11230287B2 (en) | 2019-03-12 | 2022-01-25 | Mitsubishi Electric Corporation | Vehicle control device |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN110536820B (zh) | 用于运行机动车的方法以及机动车 | |
| EP1146482B1 (en) | Mobile radio communication for an automatic toll collection system | |
| CN108116413A (zh) | 自动驾驶控制装置 | |
| CN117083647A (zh) | 用于提供前后相关信息和/或支付收费路段的方法及系统 | |
| JP2003151091A (ja) | 車両用走行支援装置 | |
| JP2004355145A (ja) | 車両制御装置 | |
| CA3070543C (en) | Vehicle travel control method and vehicle travel control device | |
| JP3472819B2 (ja) | 自動走行車両の専用道路進入・退出制御システム | |
| JP2004192607A (ja) | 車載ナビゲーションシステム | |
| JP2004062540A (ja) | 有料道路料金徴収システム及びその徴収方法 | |
| JPH01259484A (ja) | 有料道路の料金自動支払いシステム | |
| JP6841330B2 (ja) | 車両走行制御方法及び車両走行制御装置 | |
| KR20180129396A (ko) | 차량제어장치 및 차량제어방법 | |
| JP4020651B2 (ja) | 料金収受システム | |
| JP5472940B2 (ja) | 料金所通行制御システム | |
| JPH10162285A (ja) | 自動車の交通システム | |
| JP2004326422A (ja) | 自動料金収受システム、該システムを配備した出口料金所の車両迂回方法 | |
| JP4545177B2 (ja) | 料金収受システムおよびその情報伝送方法 | |
| JP2004102655A (ja) | 運転支援装置 | |
| JPH1183512A (ja) | 車両用経路誘導装置 | |
| JP2011158315A (ja) | ナビゲーション装置 | |
| JP2003302231A (ja) | 料金所表示機能を有するナビゲーション装置 | |
| JP2007065979A (ja) | 料金所通行制御システム | |
| JP2001229414A (ja) | タクシーメータ走行モード切替方法およびシステム | |
| JPH08180221A (ja) | 車両判別システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050622 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20061016 |
|
| A131 | Notification of reasons for refusal |
Effective date: 20061205 Free format text: JAPANESE INTERMEDIATE CODE: A131 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20070403 |