JP2005077832A - 工業用内視鏡システム - Google Patents
工業用内視鏡システム Download PDFInfo
- Publication number
- JP2005077832A JP2005077832A JP2003308945A JP2003308945A JP2005077832A JP 2005077832 A JP2005077832 A JP 2005077832A JP 2003308945 A JP2003308945 A JP 2003308945A JP 2003308945 A JP2003308945 A JP 2003308945A JP 2005077832 A JP2005077832 A JP 2005077832A
- Authority
- JP
- Japan
- Prior art keywords
- industrial endoscope
- server
- industrial
- image
- endoscope
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 239000000523 sample Substances 0.000 claims abstract description 126
- 238000004891 communication Methods 0.000 claims abstract description 64
- 238000003780 insertion Methods 0.000 claims description 81
- 230000037431 insertion Effects 0.000 claims description 81
- 238000000034 method Methods 0.000 claims description 48
- 238000012545 processing Methods 0.000 claims description 43
- 230000008569 process Effects 0.000 claims description 39
- 238000005094 computer simulation Methods 0.000 claims description 16
- 238000013461 design Methods 0.000 claims description 13
- 238000007689 inspection Methods 0.000 description 103
- 239000004973 liquid crystal related substance Substances 0.000 description 15
- 238000010586 diagram Methods 0.000 description 13
- 238000005259 measurement Methods 0.000 description 10
- 238000003825 pressing Methods 0.000 description 9
- 230000003287 optical effect Effects 0.000 description 8
- 230000005236 sound signal Effects 0.000 description 8
- 238000003860 storage Methods 0.000 description 8
- 238000000605 extraction Methods 0.000 description 6
- 239000003550 marker Substances 0.000 description 6
- 238000005452 bending Methods 0.000 description 5
- 239000002131 composite material Substances 0.000 description 5
- 230000004075 alteration Effects 0.000 description 4
- 238000005286 illumination Methods 0.000 description 4
- 230000008859 change Effects 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 239000011521 glass Substances 0.000 description 2
- 238000003384 imaging method Methods 0.000 description 2
- 238000012360 testing method Methods 0.000 description 2
- 125000002066 L-histidyl group Chemical group [H]N1C([H])=NC(C([H])([H])[C@](C(=O)[*])([H])N([H])[H])=C1[H] 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 230000003321 amplification Effects 0.000 description 1
- 238000004458 analytical method Methods 0.000 description 1
- 230000001174 ascending effect Effects 0.000 description 1
- 230000000052 comparative effect Effects 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000009826 distribution Methods 0.000 description 1
- 238000001839 endoscopy Methods 0.000 description 1
- 230000001771 impaired effect Effects 0.000 description 1
- 238000003199 nucleic acid amplification method Methods 0.000 description 1
- 238000012634 optical imaging Methods 0.000 description 1
- 238000012856 packing Methods 0.000 description 1
- 238000002360 preparation method Methods 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 238000004088 simulation Methods 0.000 description 1
- 230000002194 synthesizing effect Effects 0.000 description 1
Images











Landscapes
- Instruments For Viewing The Inside Of Hollow Bodies (AREA)
- Endoscopes (AREA)
- Closed-Circuit Television Systems (AREA)
Abstract
【解決手段】 工業用内視鏡装置1及びサーバー100を備え、サーバー100が、通信回線Lを介して工業用内視鏡装置1から得た内視鏡画像を、被検査物内の形状寸法を示すVE画像と比較することにより、被観察物内における内視鏡プローブ3の位置及び姿勢を求め、工業用内視鏡装置1が、通信回線Lを介して、サーバー100で求めた内視鏡プローブ3の位置及び姿勢を受信して表示する構成を採用した。
【選択図】 図1
Description
この種の工業用内視鏡装置は、下記特許文献1に示されているように、検査対象内部に挿入される細長くて可撓性を有する内視鏡プローブと、この内視鏡プローブに内蔵されたライトガイドに照明光を供給する光源装置と、内視鏡プローブの先端に内蔵された撮像素子であるCCD(電荷結合素子)からの電気信号に基づいて画像信号を生成する制御装置と、前記画像信号を表示するテレビモニタなどを備えて概略構成されている。
この場合、観察すべき部位を間違いなく観察したかどうかは観察者次第であり、客観的に確認する手だてがなかった。また、熟練していない観察者が操作した場合には、観察対象内における自らの位置(内視鏡プローブの位置)を見失うなどしてなかなか目標とする観察部位に達することができない場合もあった。したがって、場合によっては観察すべき個所を見逃して不完全な検査結果を招いてしまう虞があった。
すなわち、請求項1に記載の工業用内視鏡システムは、被観察物内に挿入される内視鏡プローブを有する工業用内視鏡装置と、該工業用内視鏡装置に通信回線を介して接続したサーバーとを備え、前記被観察物内の形状寸法を示す形状データを用意する第1の処理と、前記映像及び前記形状データ間の比較により、前記被観察物内における前記内視鏡プローブの位置及び姿勢の少なくとも一方を求める第2の処理とを行う工業用内視鏡システムであり、前記サーバーが、前記第1の処理及び前記第2の処理の少なくとも一方を行い、その処理結果を、前記通信回線を介して前記工業用内視鏡装置に送信し、前記工業用内視鏡装置が、前記処理結果に基づいて前記内視鏡プローブの位置及び姿勢の少なくとも一方を表示することを特徴とする。
上記請求項1に記載の工業用内視鏡システムによれば、そのサーバーまたは工業用内視鏡装置が、被観察物内観察時の映像と形状データとを重ね合わせて比較する第2の処理を行うことにより、両者の相対関係を一致させることができる。これにより、内視鏡プローブで撮像された映像を得るための内視鏡プローブの位置及び姿勢の少なくとも一方がどのようなものであるかを、形状データ上における内視鏡プローブの位置及び姿勢の少なくとも一方として求めることができる。しかも、形状データは予め形状寸法が判明しているものであるため、これに基づき、被観察物内における内視鏡プローブの位置及び姿勢の少なくとも一方を正確かつ容易に求めることができる。
また、映像に基づく現在観察位置の判別を観察者が行うのではなく、サーバーまたは工業用内視鏡装置側で行うものであるため、観察すべき箇所を客観的に確認することができ、これにより、観察箇所を見逃す虞を低減させることができるようになる。
しかも、前記第1の処理及び前記第2の処理の少なくとも一方の作業処理を、工業用内視鏡装置側ではなくサーバー側が負担するものであるため、前記一方の作業処理を行うための構成要素を工業用内視鏡装置側に搭載せずに済む。
上記請求項2に記載の工業用内視鏡システムによれば、工業用内視鏡装置に表示される挿入予定経路に沿って各観察箇所の観察を行うことで、全ての観察箇所を見逃すことなく順番に観察することができる。
上記請求項3に記載の工業用内視鏡システムによれば、チェックポイントを通ったか否かを確認しながら観察を行うことで、挿入予定経路上における全ての観察箇所を逃さず観察したかをより確実に確認することができる。
上記請求項4に記載の工業用内視鏡システムによれば、工業用内視鏡装置を介してサーバー側から発せられる指示(ナビゲーションガイド情報)に従って内視鏡プローブを操作しながら移動させることにより、挿入予定経路から外れることなく挿入プローブを移動させることができる。
上記請求項5に記載の工業用内視鏡システムによれば、観察結果を、観察記録という客観的な記録として保存することができる。
上記請求項6に記載の工業用内視鏡システムによれば、請求項1に記載の作用を確実に得ることができる。
上記請求項7に記載の工業用内視鏡システムによれば、請求項1に記載の作用を確実に得ることができる。
しかも、前記第1の処理及び前記第2の処理の少なくとも一方の作業処理を、工業用内視鏡装置側ではなくサーバー側が負担するものであるため、前記一方の作業処理を行うための構成要素を工業用内視鏡装置側に搭載せずに済む。これにより、追加機能を備えながらも、工業用内視鏡装置の可搬性を従来と略同等に保つことが可能となっている。
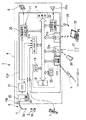
なお、同図の符号11は、後述のCCU17を経由せずに映像を映像信号処理回路に入力するための外部映像入力端子を示している。また、符号12は、外部から電力を取り入れるためのコンセントケーブルを示している。
同図3に示すように、内視鏡プローブ3の基端部は、コントロールユニット6内の内視鏡ユニット15に接続されている。この内視鏡ユニット15の内部には、撮影時に必要な照明光を内視鏡プローブ3に内蔵されたライトガイドに供給する光源16や、内視鏡プローブ3に内蔵された湾曲部(図示せず)を電気的に湾曲動作させる電動湾曲装置(図示せず)などが内蔵されている。さらに、コントロールユニット6内には、内視鏡プローブ3の挿入長(すなわち、コントロールユニット6からの内視鏡プローブ3の引き出し長さ)を検出する内視鏡挿入長センサ(ロータリーエンコーダ)REが内蔵されている。
前記RS−232C I/F21cは、リモートコントローラ7による操作に基づいてコントロールユニット6全体を動作制御するのに必要な通信を行うためのインターフェイスであり、CCU17、内視鏡ユニット15、内視鏡挿入長センサRE、そしてリモートコントローラ7のそれぞれに接続されている。また、バスを介してCPU18に接続されている。これにより、リモートコントローラ7で、CCU17及び内視鏡ユニット15への動作指示及び制御を行うことが可能となっている。
前記LCD8は、内視鏡プローブ3からの内視鏡画像(映像)や操作制御内容(例えば処理メニュー)等の表示を行う表示部であるタッチパネル式の液晶モニタである。
前記リモートコントローラ7には、湾曲操作用のジョイスティック、メニュー選択用のジョイスティック、フリーズスイッチ、画像記録スイッチ等が設けられており、各種のリモコン操作を行えるようになっている。これについて図10を参照して説明すると、観察者の判断により、図10に示すリモートコントローラ7のフリーズスイッチ7aを押下することでLIVE画像を停止させ、画像記録スイッチ7bを押下することで、停止させたLIVE画像を制御部CUの記録部Rに記録することができるようになっている。ちなみに、この図10における符号7cは、内視鏡プローブ3の先端を湾曲動作させるためのジョイスティックであり、また符号7dは、LCD8上のポインタを動かすためのジョイスティックである。
前記通信装置101は、工業用内視鏡装置1内の制御部CUと、前記サーバー100との間に通信回線Lを形成するための無線送受信機であり、制御部CUからサーバー100に向かって通信データを送信したり、または、サーバー100から制御部CUに送られてくる通信データを受信する機能を備えている。なお、通信回線Lとして無線を採用した場合を例に説明を続けていくが、無線に限らず、有線の通信回線Lを採用しても良いことは勿論である。
すなわち、このサーバー100は、図1に示すように、前記通信回線Lを介して工業用内視鏡装置1から得た内視鏡画像(映像)を、前記被観察物内の形状寸法を示す形状データと比較することにより、前記被観察物内における内視鏡プローブ3の位置及び姿勢を求めることが可能となっている。さらに、このサーバー100は、工業用内視鏡装置1との間で通信データの受け渡しを行うための通信装置102を備えており、サーバー100側で求めた内視鏡プローブ3の位置及び姿勢を、通信回線Lを介して工業用内視鏡装置1側に送信し、前記LCD8に表示させることも可能となっている。これにより、観察者に、どのように内視鏡プローブ3を操作すればスムーズに検査が行えるかを常に指示することが可能となっている。
また、サーバー100は、図1に示す記録部Rを備えており、求めた内視鏡プローブ3の位置及び姿勢と、これら位置及び姿勢に対応する前記リアルタイム映像とを関連づけた検査記録を記録することが可能となっている。
また、サーバ100の記録部Rに記録した検査記録は図示しないダウンロードメニューなどを操作することにより、工業用内視鏡装置1の記録部Rや、工業用内視鏡装置1を介して接続されたPC25にダウンロードすることができる。これにより、工業用内視鏡装置1とサーバー100で行った検査内容をPC25などで確認または保存することができる。
続くステップS2では、被検査物情報として読み込まれた被検査物の設計情報に基づいて計算機モデル(3Dモデル、形状データ)が生成される。この計算機モデルの生成により、サーバー100は、被検査物の詳細かつ高精度な内部形状の把握を行う。
なお、これら図のうちのどれを表示領域A1に表示させるかは、図7(a),(b)に示す表示切り替え操作部a2内のどのボタンを観察者が押すかによって選択することが可能となっている。すなわち、観察者が表示切り替え操作部a2の「平」のボタンを押した場合には、この操作指示が工業用内視鏡装置1から通信回線Lを介してサーバー100に送信される。そして、この操作指示を受信したサーバー100は、必要とされる平面図を用意し、通信回線Lを介して工業用内視鏡装置1に送信する。そして、この平面図を受信した工業用内視鏡装置1は、前記表示領域A1に前記平面図を表示する。また、表示切り替え操作部a2の「正」のボタンを押した場合にも通信回線Lを介して操作指示及び正面図の送受信が行われ、前記表示領域A1に前記正面図が表示される。また、表示切り替え操作部a2の「側」のボタンを押した場合にも通信回線Lを介して操作指示及び側面図の送受信が行われ、前記表示領域A1に前記側面図が表示される。また、表示切り替え操作部a2の「斜」のボタンを押した場合にも通信回線Lを介して操作指示及び斜視図の送受信が行われ、前記表示領域A1に前記斜視図が表示される。各ボタンのうちのどれが選択されたかは、太枠表示されることによって確認することができる。
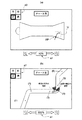
図7(a),(b)に示すように、表示領域A1には、チャート図を拡大表示または縮小表示させるための表示倍率操作部a1が備えられている。そして、ここに表示される拡大/縮小倍率を上下させる(具体的には、表示倍率操作部a1の左にある虫眼鏡印を押すことによって縮小表示させたり、あるいは、表示倍率操作部a1の右にある虫眼鏡印を押すことによって拡大表示させる。)ことで、図7(a)に示すようにチャート図を縮小表示させて被検査物の全体像を把握したり、あるいは、図7(b)に示すように任意箇所(例えば、図7(a)のチャート図内のU部)を拡大表示させて被検査物内における内視鏡プローブ3の位置を正確に把握することが可能となっている。
まず、サブルーチンSUBのステップS5では、内視鏡装置情報の入力または読み込みが実行される。すなわち、観察者が前記リモートコントローラ7などを操作することにより、工業用内視鏡装置1に、その内視鏡プローブ3に装着される光学アダプタの種類、内視鏡プローブ3の径及び長さ、測定モード(通常測定モード、ステレオ測定モード等)などの入力、またはこれらの読み込みが行われる。
続くステップS6では、観察者が前記リモートコントローラ7などを操作することにより、前記チャート図上における内視鏡プローブ3の挿入開始位置の入力が工業用内視鏡装置1に対して行われる。すなわち、図7(a)で図示したアクセスポイントAPを前記チャート図上に指定する。この指定は、前記チャート図上に図示しないポインタを重ね合わせて指定することで行われる。なお、挿入口(アクセスポイントAP)が小さくて指定しづらい場合には、必要に応じて前記表示倍率操作部a1を操作して、前記チャート図を拡大表示させてから行うのが好ましい。
なお、この入力操作においては、図7(b)に示した表示内容を、図8に示す「設定モード」に変更してから行われる。この「設定モード」では、画面下部に、これから設定するポイントが検査対象である「検査部位」であるのか、または、これら「検査部位」に到達するための道標となる「通過点」であるのかを選択する選択メニューm1と、同ポイントを他のポイントと識別したり、または、最終到達点であることを示すためのID番号を入力するID入力部m2と、各入力内容を決定するためのOKボタンm3と、各入力内容をキャンセルするCANCELボタンm4とが表示される。
以上の入力操作が正しく済んだらOKボタンm3を押下し、入力し直す場合にはCANCELボタンm4を押下する。OKボタンm3が押下された場合、工業用内視鏡装置1は、指定されたID番号が重複していないかをチェックし、重複していた場合には、再度入力を促すエラー表示を画面上に表示させる。なお、ID入力部m2で「E」を選択した場合には、このポイントが最終到達点として入力される。
一方、サブルーチンSUBのステップS8において、内視鏡挿入条件情報の入力が完了していない場合には、「No」ボタンを押下することで、再びステップS7に制御フローが戻される。
なお、上記各ステップS5〜S8の入力操作は、各入力項目が毎回同じである場合の入力操作の手間を省くべく、サーバー100内の記録部R、または、前記PCMCIAメモリーカード26や前記コンパクトフラッシュ(登録商標)メモリーカード27等の外部記憶媒体に各入力項目を記録しておき、この記録内容を読み込ませることで、観察者の入力作業を省くものとしても良い。
そして、サーバー100で求められた挿入予定経路は、ステップS10において、前記通信回線Lを介して工業用内視鏡装置1側に送信され、前記チャート図上に重ねて表示される。これにより、地図であるチャート図上に、出発点である挿入開始位置(アクセスポイントAP)から、各通過点を通って各検査部位に達するまでの経路が確定される。
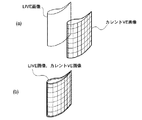
ところで、内視鏡プローブ3に装着する光学アダプタとして、プリズムを内蔵し、側面から入射した光を反射させて前記CCD上に結像するタイプの側視アダプタを用いる場合には、前記CCD上には左右反転した画像(鏡像)が結像される。この画像とカレントVE画像との間でマッチングを取ろうとしても、正常にマッチングすることができない。そこで、前述のステップS5において内視鏡装置情報を入力する際に、使用する光学アダプタが側視アダプタであるか否かをサーバー100側に取り込んでおき、本ステップS12における上記マーカーデータ(VE画像)の生成において、生成された各VE画像を最終的に左右反転させておくことが好ましい。もちろん、側視アダプタを用いない場合には、この画像反転動作は不要である。
同様に、使用する光学アダプタ毎に歪曲収差の特性も異なるので、前記ステップS5において予め読み込まれた歪曲収差のデータも、マーカーデータ(VE画像)の生成に反映される。すなわち、前記仮想の内視鏡プローブから見た内視鏡画像を生成する際に、前記歪曲収差に基づいて画像を歪ませることで、同等の歪曲収差をマーカーデータ(VE画像)に与える。
同時に、図4のステップS14において、各VE画像のうち、検査実施時に最初に通る点のものがサーバー100側で選び出され、この選び出されたVE画像が、図6の表示領域A3にカレントVE画像として表示される。
逆に、設定した挿入予定経路で問題ないとステップS16で判断された場合には、ステップS17に進み、設定した挿入予定経路の保存が行われる。この時、併せて前記計算機モデル、チャート図、挿入開始位置、各検査部位、各通過点、前記VE画像、各ランドマークなど、後の検査実施に用いる情報も、サーバー100の記録部Rに保存される。
一方、サーバー100側では、前記保存情報を読み込み、図4に示した情報(チャート図、チャート図上に設定された挿入予定経路、挿入予定経路上に設定されたチェックポイントである各ランドマーク画像など)を、通信回線Lを介して工業用内視鏡装置1側に送信し、そのLCD8上に表示させることが可能な状態になる。
以上により、図1に示すように、内視鏡プローブ3の挿入長及びリアルタイム映像が前記通信回線Lを介して工業用内視鏡装置1側からサーバー100側に送信され、また、リアルタイム映像に基づく内視鏡プローブ3の位置及び姿勢やVE画像等が、サーバー100側から工業用内視鏡装置1側に送信可能になる。このようにして、検査準備が整う。
続くステップS23では、選定されたランドマーク画像が前記通信回線Lを介してサーバー100から工業用内視鏡装置1に送信され、図6に示すカレントVE画像として拡大表示される。なお、ここで言う「カレント」とは、「現在選択されている」という意味を示す。
なお、以下の説明においては、サーバー100内の処理動作を中心に説明を行うが、観察者は、内視鏡プローブ3の挿入を、LCD8を介してサーバー100から送られてくる指示に従って進めながらLIVE画像を観察することで被検査物の内部検査を適宜実施する。
第1の判断方法は、観察者が、見ているLIVE画像の映像がカレントVE画像に似たような場所に近づいてきたと自ら判断した場合に、リモートコントローラ7を操作してサーバー100に知らせる方法である。
なお、本実施形態では、カレントVE画像を設計データに基づいて作成しているが、これに限らず、過去検査時に撮影した実映像に基づいて作成することも可能である。その場合には、図11(a)でカレントVE画像から特徴点を抽出した手順と同様の手順により、特徴点の抽出を行うことで対応できる。すなわち、過去検査時の実映像上から、輝度が極端に変わる線をつなげていくことで、過去検査時の実映像上に映し出された部品の特徴をなす外形状が、ワイヤーフレームに変換して表示される。
ステップS27に進んだ場合には、両画像の相対的な位置関係がずれている場合が想定されるとして、内視鏡プローブ3の先端の位置姿勢推定が実行される(図3の符号i,jも参照。)。すなわち、サーバー100は、カレントVE画像の表示内容がLIVE画像と一致するように仮想内視鏡プローブの位置及び姿勢を変更した場合の位置移動量及び姿勢移動量を算出し、これらを、検査計画時にこのカレントVE画像を作成したと同時に記録した仮想内視鏡プローブの位置及び姿勢に加えることで、現在の内視鏡プローブ3の先端の位置及び姿勢を推定して求める。
そして、ステップS28において表示内容が一致した後の制御流れは、再びステップS24へと戻され、再び特徴抽出の工程が実行される。このようにして、LIVE画像の特徴とカレントVE画像の特徴とが一致してステップS29に向かうまで、ステップS24〜ステップ28の工程が繰り返される。
図12に示すように、画面中央下部に示す表示領域A6には、検査項目のリストが一覧表示される。この検査項目のリストは、このランドマーク位置の検査箇所において検査すべき項目の見出しを一覧表示したものである。これら検査項目のリストのうちの何れかを観察者が選択すると、左側の表示領域A7に、検査項目の詳細が表示される。さらに、図12の中央上部の「参考画像」の表示A8を観察者が押すと、過去に撮影した同箇所の画像(過去画像)がサーバー100の記録部Rから通信回線Lを介して送信され、左側の表示領域A9に表示される。なお、表示A8を省略し、表示A6を押して表示領域A7に検査項目の詳細を表示させた時点で、自動的に表示領域A9に過去画像を表示させるように構成しても良い。
この検査部位における全ての検査が終了した場合には、観察者が図12の中央上部の「確認済」の表示A11を押す。すると、表示領域A6内に「済」のマークA61が表示されると同時に、検査が済んだことがサーバー100に送信され、その記録部Rに証拠記録として保存される(図3の符号lも参照。)。このようにしてサーバー100に検査記録を残すことにより、検査漏れをなくすことができる上に、後の解析に利用することが可能となる。なお、この記録動作は本例のように各ランドマーク通過後に逐一行っても良いし、もしくは、後述のステップS33に説明するように、最終ランドマークを通過後に一括して保存するものとしても良い。
同図に示すように、記録部Rには、各ランドマークIDと、カレントVE画像の元となる被検査物全体の3Dモデルである検査部位モデルと、図4のステップS6において入力した内視鏡装置情報と、内視鏡プローブ3をどのような経路で挿入していったか(どの位置をどのような姿勢で通過させたか)を示す挿入軌跡情報と、前記検査対象物(エンジン、パイプなど)を識別するためのユニークなIDである被検体IDとが記録される。前記挿入軌跡情報の記録が、図5のステップS29に示す挿入軌跡情報更新である。挿入軌跡情報は、ランドマークIDと関連づけて記録されている。すなわち、ランドマーク地点各々での、位置・姿勢が関連づけて記録されている。
以上のようにして全ての検査項目の実施が済んだ後は、LCD8の表示画面を、図12の表示内容(「検査モード」)から図6の表示内容に自動的に切り替える。
一方、ステップS31において最終のランドマーク位置に達している(Yes)と判断された場合には、ステップS33へと進み、全てのLIVE画像や、これらLIVE画像に対応して求められた内視鏡プローブ3の先端の位置及び姿勢など、図13で説明した事項が最終的な検査記録(観察記録)としてサーバー100内の記録部Rに自動的に保存される。また、工業用内視鏡装置1に対して検査終了を通知する。
以上により、検査実施時における前記制御部の制御動作が完了する。
この構成によれば、サーバー100から発せられる指示(ナビゲーションガイド情報)に従って内視鏡プローブ3を操作しながら移動させることにより、挿入予定経路から外れることなく挿入プローブ11を移動させることができる。したがって、サーバー100からの指示に従って内視鏡プローブ3を移動させていくことで、熟練者が操作した場合のように、挿入予定経路から外れることなく挿入プローブ11を移動させることが可能となる。
すなわち、以前検査した際の実映像から特徴抽出を行ってコンピュータグラフィック化し、このコンピュータグラフィック画像と今回検査時の実映像とをマッチングさせることにより、現時点における内視鏡プローブ3の先端の位置及び姿勢を求めるようにしても良い。この場合、被検査物の設計データが不要となるので、より広い用途に柔軟に対応することが可能となる。
すなわち、図4に示した検査計画時においては、挿入開始点から最終到達点に至るまでの全経路のVE画像(仮想内視鏡の視線から見たコンピュータグラフィック画像)を作成しておき、図5に示した検査実施時においては、前記全経路のVE画像とLIVE画像(リアルタイム映像)との間で常に特徴点のマッチングを取得し、これにより、内視鏡プローブ3の先端の位置及び姿勢を常時連続して求める。すなわち、図5のステップS30では何もせずに通過し、ステップS31におけるチェックのみを行う。
この場合、常時連続して求められる内視鏡プローブ3の位置及び姿勢に基づき、挿入予定経路に正しく沿って進むことができるように、前記操作指示(カレントVE画像上の矢印による指示や音声指示など。)も併せて発することにより、より高精度かつスムーズに観察者が内視鏡プローブ3を操作することが可能となる。したがって、より高い再現性を得ることが可能となる。
この場合には、通信回線Lを流れる情報量(トラフィック量)を軽減させることが可能となるものの、工業用内視鏡装置1側の処理能力を上げる必要がある。一方、本実施形態のように前記第1の処理及び前記第2の処理の両方を行わせる場合には、通信回線Lを流れる情報量(トラフィック量)が多いものの、工業用内視鏡装置1側の処理能力を最低限まで抑えることが可能となる。
3・・・内視鏡プローブ
100・・・サーバー
L・・・通信回線
Claims (7)
- 被観察物内に挿入される内視鏡プローブを有する工業用内視鏡装置と、該工業用内視鏡装置に通信回線を介して接続したサーバーとを備え、
前記被観察物内の形状寸法を示す形状データを用意する第1の処理と、前記映像及び前記形状データ間の比較により、前記被観察物内における前記内視鏡プローブの位置及び姿勢の少なくとも一方を求める第2の処理とを行う工業用内視鏡システムであり、
前記サーバーが、前記第1の処理及び前記第2の処理の少なくとも一方を行い、その処理結果を、前記通信回線を介して前記工業用内視鏡装置に送信し、
前記工業用内視鏡装置が、前記処理結果に基づいて前記内視鏡プローブの位置及び姿勢の少なくとも一方を表示する
ことを特徴とする工業用内視鏡システム。 - 請求項1に記載の工業用内視鏡システムにおいて、
前記サーバーが、前記形状データ上に設定される挿入予定経路を、前記通信回線を介して前記工業用内視鏡装置に送信し、
前記工業用内視鏡装置が、前記挿入予定経路を受信して表示する
ことを特徴とする工業用内視鏡システム。 - 請求項2に記載の工業用内視鏡システムにおいて、
前記サーバーが、前記挿入予定経路上に設定されたチェックポイントを、前記通信回線を介して前記工業用内視鏡装置に送信し、
前記工業用内視鏡装置が、前記チェックポイントを受信して表示する
ことを特徴とする工業用内視鏡システム。 - 請求項2または請求項3に記載の工業用内視鏡システムにおいて、
前記サーバーが、前記内視鏡プローブの位置及び姿勢の少なくとも一方と前記挿入予定経路との比較に基づいて前記内視鏡プローブの移動すべき方向を求め、前記通信回線を介して前記工業用内視鏡装置に送信し、
前記工業用内視鏡装置が、前記内視鏡プローブの移動すべき方向を受信して示す
ことを特徴とする工業用内視鏡システム。 - 請求項1〜請求項4の何れか1項に記載の工業用内視鏡システムにおいて、
前記サーバーが、前記観察物内における前記内視鏡プローブの位置及び姿勢の少なくとも一方と、これら位置及び姿勢に対応する前記映像とを関連づけた観察記録を記録することを特徴とする工業用内視鏡システム。 - 請求項5に記載の工業用内視鏡システムにおいて、
前記形状データが、過去観察時の前記観察記録に記録された前記内視鏡プローブの位置及び姿勢の少なくとも一方と前記映像とに基づいて前記サーバーで構成された計算機モデルであることを特徴とする工業用内視鏡装置。 - 請求項1〜請求項5の何れか1項に記載の工業用内視鏡システムにおいて、
前記形状データが、前記被観察物の設計情報に基づいて前記サーバーで構成された計算機モデルであることを特徴とする工業用内視鏡装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003308945A JP4464641B2 (ja) | 2003-09-01 | 2003-09-01 | 工業用内視鏡システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003308945A JP4464641B2 (ja) | 2003-09-01 | 2003-09-01 | 工業用内視鏡システム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2005077832A true JP2005077832A (ja) | 2005-03-24 |
| JP2005077832A5 JP2005077832A5 (ja) | 2006-10-12 |
| JP4464641B2 JP4464641B2 (ja) | 2010-05-19 |
Family
ID=34411256
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003308945A Expired - Fee Related JP4464641B2 (ja) | 2003-09-01 | 2003-09-01 | 工業用内視鏡システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4464641B2 (ja) |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009169244A (ja) * | 2008-01-18 | 2009-07-30 | Olympus Corp | 画像記録装置、内視鏡検査システム、検査方法及びプログラム |
| KR200448743Y1 (ko) * | 2009-02-19 | 2010-05-12 | 주식회사 반디텔 | 항공기 엔진룸 검사 시스템 |
| WO2011070845A1 (ja) * | 2009-12-11 | 2011-06-16 | オリンパス株式会社 | 頭部装着型表示装置および頭部装着型表示システム |
| WO2013045108A1 (de) * | 2011-09-30 | 2013-04-04 | Lufthansa Technik Ag | Endoskopiesystem und korrespondierendes verfahren zur untersuchung von gasturbinen |
| JP2014161374A (ja) * | 2013-02-21 | 2014-09-08 | Olympus Corp | 被検体挿入システム |
| EP2597273A3 (en) * | 2011-11-28 | 2018-02-28 | Rolls-Royce plc | An apparatus and a method of inspecting a turbomachine |
| EP3520671A4 (en) * | 2016-09-30 | 2019-10-16 | FUJIFILM Corporation | PROCESSOR DEVICE, ENDOSCOPY SYSTEM AND METHOD FOR OPERATING A PROCESSOR DEVICE |
| WO2021111756A1 (ja) | 2019-12-02 | 2021-06-10 | 富士フイルム株式会社 | 内視鏡システム、制御プログラム、及び表示方法 |
| CN115209783A (zh) * | 2020-02-27 | 2022-10-18 | 奥林巴斯株式会社 | 处理装置、内窥镜系统以及摄像图像的处理方法 |
| RU235917U1 (ru) * | 2025-04-30 | 2025-07-17 | федеральное государственное автономное образовательное учреждение высшего образования "Национальный исследовательский ядерный университет МИФИ" (НИЯУ МИФИ) | Аппарат диагностики двигателя внутреннего сгорания |
-
2003
- 2003-09-01 JP JP2003308945A patent/JP4464641B2/ja not_active Expired - Fee Related
Cited By (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009169244A (ja) * | 2008-01-18 | 2009-07-30 | Olympus Corp | 画像記録装置、内視鏡検査システム、検査方法及びプログラム |
| KR200448743Y1 (ko) * | 2009-02-19 | 2010-05-12 | 주식회사 반디텔 | 항공기 엔진룸 검사 시스템 |
| WO2011070845A1 (ja) * | 2009-12-11 | 2011-06-16 | オリンパス株式会社 | 頭部装着型表示装置および頭部装着型表示システム |
| WO2013045108A1 (de) * | 2011-09-30 | 2013-04-04 | Lufthansa Technik Ag | Endoskopiesystem und korrespondierendes verfahren zur untersuchung von gasturbinen |
| US9939349B2 (en) | 2011-09-30 | 2018-04-10 | Lufthansa Technik Ag | Endoscopy system and corresponding method for examining gas turbines |
| RU2610973C2 (ru) * | 2011-09-30 | 2017-02-17 | Люфтганза Техник Аг | Эндоскопическая система и способ для обследования газовых турбин |
| EP2597273A3 (en) * | 2011-11-28 | 2018-02-28 | Rolls-Royce plc | An apparatus and a method of inspecting a turbomachine |
| US10217208B2 (en) | 2011-11-28 | 2019-02-26 | Rolls-Royce Plc | Apparatus and a method of inspecting a turbomachine |
| JP2014161374A (ja) * | 2013-02-21 | 2014-09-08 | Olympus Corp | 被検体挿入システム |
| EP3520671A4 (en) * | 2016-09-30 | 2019-10-16 | FUJIFILM Corporation | PROCESSOR DEVICE, ENDOSCOPY SYSTEM AND METHOD FOR OPERATING A PROCESSOR DEVICE |
| WO2021111756A1 (ja) | 2019-12-02 | 2021-06-10 | 富士フイルム株式会社 | 内視鏡システム、制御プログラム、及び表示方法 |
| CN115209783A (zh) * | 2020-02-27 | 2022-10-18 | 奥林巴斯株式会社 | 处理装置、内窥镜系统以及摄像图像的处理方法 |
| RU235917U1 (ru) * | 2025-04-30 | 2025-07-17 | федеральное государственное автономное образовательное учреждение высшего образования "Национальный исследовательский ядерный университет МИФИ" (НИЯУ МИФИ) | Аппарат диагностики двигателя внутреннего сгорания |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4464641B2 (ja) | 2010-05-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8558879B2 (en) | Endoscope apparatus and measuring method | |
| CN100364479C (zh) | 内窥镜装置及其引导方法、以及内窥镜图像的显示方法 | |
| US8353816B2 (en) | Endoscopy system and method therefor | |
| US7443488B2 (en) | Endoscope apparatus, method of operating the endoscope apparatus, and program to be executed to implement the method | |
| JP5028191B2 (ja) | 内視鏡装置 | |
| US9392230B2 (en) | Endoscopic apparatus and measuring method | |
| JP2005338551A (ja) | 工業用内視鏡装置 | |
| JP5307407B2 (ja) | 内視鏡装置およびプログラム | |
| CN105491936B (zh) | 胶囊型内窥镜系统 | |
| US20070078328A1 (en) | Operation assisting system | |
| JP2002306509A (ja) | 遠隔手術支援システム | |
| JP5993515B2 (ja) | 内視鏡システム | |
| JP7464060B2 (ja) | 画像処理装置、制御方法及びプログラム | |
| CN101420900B (zh) | 图像显示装置 | |
| WO2017203814A1 (ja) | 内視鏡装置、内視鏡装置の作動方法 | |
| CN104797186A (zh) | 内窥镜系统 | |
| US20020183590A1 (en) | Measuring endoscope apparatus | |
| JP2008206956A (ja) | 計測用内視鏡装置 | |
| JP4464641B2 (ja) | 工業用内視鏡システム | |
| JP5602449B2 (ja) | 内視鏡装置 | |
| KR101580559B1 (ko) | 의료 영상 및 정보 실시간 상호전송 및 원격 지원 장치 | |
| JP4916114B2 (ja) | 内視鏡装置 | |
| JP4464640B2 (ja) | 工業用内視鏡装置 | |
| WO2024028934A1 (ja) | 内視鏡検査支援装置、内視鏡検査支援方法、及び、記録媒体 | |
| JP6211239B1 (ja) | 内視鏡装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20060828 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060828 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20091104 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20091228 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20091229 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100126 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100219 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130226 Year of fee payment: 3 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4464641 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140226 Year of fee payment: 4 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |