JP2005201882A - 使い捨てチップの先端検出方法と使い捨てチップを用いた分注装置 - Google Patents
使い捨てチップの先端検出方法と使い捨てチップを用いた分注装置 Download PDFInfo
- Publication number
- JP2005201882A JP2005201882A JP2004090066A JP2004090066A JP2005201882A JP 2005201882 A JP2005201882 A JP 2005201882A JP 2004090066 A JP2004090066 A JP 2004090066A JP 2004090066 A JP2004090066 A JP 2004090066A JP 2005201882 A JP2005201882 A JP 2005201882A
- Authority
- JP
- Japan
- Prior art keywords
- tip
- chip
- disposable
- sample tank
- sensor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
- 238000000034 method Methods 0.000 title claims abstract description 17
- 238000001514 detection method Methods 0.000 claims description 51
- 239000007788 liquid Substances 0.000 claims description 35
- 238000004519 manufacturing process Methods 0.000 claims description 5
- 239000000523 sample Substances 0.000 description 89
- 239000000243 solution Substances 0.000 description 89
- 238000006243 chemical reaction Methods 0.000 description 34
- 238000002834 transmittance Methods 0.000 description 9
- 238000010586 diagram Methods 0.000 description 6
- 239000002699 waste material Substances 0.000 description 6
- 238000009396 hybridization Methods 0.000 description 5
- 230000007423 decrease Effects 0.000 description 4
- 239000000853 adhesive Substances 0.000 description 3
- 230000001070 adhesive effect Effects 0.000 description 3
- 238000013461 design Methods 0.000 description 3
- 238000006073 displacement reaction Methods 0.000 description 3
- 230000003287 optical effect Effects 0.000 description 3
- -1 polyethylene Polymers 0.000 description 3
- 238000005406 washing Methods 0.000 description 3
- 239000004809 Teflon Substances 0.000 description 2
- 229920006362 Teflon® Polymers 0.000 description 2
- 238000004140 cleaning Methods 0.000 description 2
- 238000004891 communication Methods 0.000 description 2
- 238000011109 contamination Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 238000005375 photometry Methods 0.000 description 2
- 239000011534 wash buffer Substances 0.000 description 2
- 108020003215 DNA Probes Proteins 0.000 description 1
- 238000000018 DNA microarray Methods 0.000 description 1
- 239000003298 DNA probe Substances 0.000 description 1
- 229930182556 Polyacetal Natural products 0.000 description 1
- 239000004698 Polyethylene Substances 0.000 description 1
- 239000004743 Polypropylene Substances 0.000 description 1
- 239000004793 Polystyrene Substances 0.000 description 1
- BZHJMEDXRYGGRV-UHFFFAOYSA-N Vinyl chloride Chemical compound ClC=C BZHJMEDXRYGGRV-UHFFFAOYSA-N 0.000 description 1
- 238000004458 analytical method Methods 0.000 description 1
- 239000000427 antigen Substances 0.000 description 1
- 102000036639 antigens Human genes 0.000 description 1
- 108091007433 antigens Proteins 0.000 description 1
- 238000005842 biochemical reaction Methods 0.000 description 1
- 239000008280 blood Substances 0.000 description 1
- 210000004369 blood Anatomy 0.000 description 1
- 239000000872 buffer Substances 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 239000000470 constituent Substances 0.000 description 1
- 238000007599 discharging Methods 0.000 description 1
- 238000001746 injection moulding Methods 0.000 description 1
- 239000006249 magnetic particle Substances 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 229910052751 metal Inorganic materials 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 108020004707 nucleic acids Proteins 0.000 description 1
- 102000039446 nucleic acids Human genes 0.000 description 1
- 150000007523 nucleic acids Chemical class 0.000 description 1
- TWNQGVIAIRXVLR-UHFFFAOYSA-N oxo(oxoalumanyloxy)alumane Chemical compound O=[Al]O[Al]=O TWNQGVIAIRXVLR-UHFFFAOYSA-N 0.000 description 1
- 229920005668 polycarbonate resin Polymers 0.000 description 1
- 239000004431 polycarbonate resin Substances 0.000 description 1
- 229920000573 polyethylene Polymers 0.000 description 1
- 229920000139 polyethylene terephthalate Polymers 0.000 description 1
- 239000005020 polyethylene terephthalate Substances 0.000 description 1
- 229920000306 polymethylpentene Polymers 0.000 description 1
- 239000011116 polymethylpentene Substances 0.000 description 1
- 229920006324 polyoxymethylene Polymers 0.000 description 1
- 229920001155 polypropylene Polymers 0.000 description 1
- 229920002223 polystyrene Polymers 0.000 description 1
- 238000002360 preparation method Methods 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 102000004169 proteins and genes Human genes 0.000 description 1
- 108090000623 proteins and genes Proteins 0.000 description 1
- 230000035484 reaction time Effects 0.000 description 1
- 230000002787 reinforcement Effects 0.000 description 1
- 230000003014 reinforcing effect Effects 0.000 description 1
- 239000012488 sample solution Substances 0.000 description 1
- 230000035945 sensitivity Effects 0.000 description 1
- 239000007790 solid phase Substances 0.000 description 1
- 238000003860 storage Methods 0.000 description 1
- 229920005992 thermoplastic resin Polymers 0.000 description 1
- 238000009736 wetting Methods 0.000 description 1
Images












Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/10—Devices for transferring samples or any liquids to, in, or from, the analysis apparatus, e.g. suction devices, injection devices
- G01N35/1009—Characterised by arrangements for controlling the aspiration or dispense of liquids
- G01N35/1011—Control of the position or alignment of the transfer device
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/10—Devices for transferring samples or any liquids to, in, or from, the analysis apparatus, e.g. suction devices, injection devices
- G01N35/1009—Characterised by arrangements for controlling the aspiration or dispense of liquids
- G01N35/1011—Control of the position or alignment of the transfer device
- G01N2035/1013—Confirming presence of tip
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/10—Devices for transferring samples or any liquids to, in, or from, the analysis apparatus, e.g. suction devices, injection devices
- G01N2035/1027—General features of the devices
- G01N2035/103—General features of the devices using disposable tips
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N35/00—Automatic analysis not limited to methods or materials provided for in any single one of groups G01N1/00 - G01N33/00; Handling materials therefor
- G01N35/10—Devices for transferring samples or any liquids to, in, or from, the analysis apparatus, e.g. suction devices, injection devices
- G01N35/1081—Devices for transferring samples or any liquids to, in, or from, the analysis apparatus, e.g. suction devices, injection devices characterised by the means for relatively moving the transfer device and the containers in an horizontal plane
- G01N35/109—Devices for transferring samples or any liquids to, in, or from, the analysis apparatus, e.g. suction devices, injection devices characterised by the means for relatively moving the transfer device and the containers in an horizontal plane with two horizontal degrees of freedom
Landscapes
- Physics & Mathematics (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Biochemistry (AREA)
- General Health & Medical Sciences (AREA)
- General Physics & Mathematics (AREA)
- Immunology (AREA)
- Pathology (AREA)
- Automatic Analysis And Handling Materials Therefor (AREA)
- Sampling And Sample Adjustment (AREA)
Abstract
【課題】 使い捨てチップの先端検出方法と使い捨てチップを用いた分注装置を提供すること。
【解決手段】 使い捨てチップをノズルに装着して分注を行う分注装置に適用される使い捨てチップの先端検出方法において、前記使い捨てチップが装着されたノズルをチップ先端検出器に移動させる工程と、該チップ先端検出器で前記使い捨てチップの先端位置を検出する工程とを備えた。
【選択図】 図1
【解決手段】 使い捨てチップをノズルに装着して分注を行う分注装置に適用される使い捨てチップの先端検出方法において、前記使い捨てチップが装着されたノズルをチップ先端検出器に移動させる工程と、該チップ先端検出器で前記使い捨てチップの先端位置を検出する工程とを備えた。
【選択図】 図1
Description
本発明は、使い捨てチップの先端検出方法と使い捨てチップを用いた分注装置に関する。本発明は、特に自動分注装置において、試料槽を破壊又は傷つけることなく、試料槽上に分注された溶液をなるべく多く吸引して、残留液を少なくするための使い捨てチップの先端部の検出方法と使い捨てチップを用いた分注装置に関する。
試料溶液の分注を行う分注装置が知られている。分注装置は、例えば人体から採取した血液検体を複数の容器に分配する装置として用いられている。なお、分注装置において、試料の吸引は、使い捨て(ディスポーザブル化された)チップを有するノズルによって行われている。このとき、正確に試料を吸引・吐出するために、次のような提案がなされている(特許文献1)。この提案によれば、正確な液量測定を行う目的で使い捨てチップ(単に「チップ」と称する)に印を付けて、それを検出する。そして、この印を基準として内部に液体を吸引したチップの先端位置を検出(算出)して、液量測定する際に、光学的に使い捨てチップの先端の絶対位置とチップの嵌合状態のいずれか又はそれらの両者を検知する。
また、引用文献2には、複数の吸引ノズルの先端を容器(マイクロプレート)の壁面に接触させて、容器内の溶液を吸引する排液装置が開示されている。引用文献2によれば、その図5及び図6に示すように、マイクロプレート内にある磁性粒子と溶液を分離するために、一旦、磁石を使用して、吸引ノズルの先端を避けるように容器内壁面に集め、吸引ノズルの先端を容器内の壁面に接触させて溶液吸引を行っている。
特許第3024890号
特開2002−1092号
しかしながら、上記の分注装置によってチップの先端位置を検出する場合に、チップにつけられた印を基準としている。このため、チップへの印をつける場合における印の位置精度やチップの嵌合状態によって印の位置が異なってしまう。このため、チップを試料槽ぎりぎりまで近づけて、かつ試料槽を破壊又は、傷つけることなく、できるだけ残留液が少なくなるように、試料槽上に分注された溶液を吸引することは困難であった。
また、引用文献2に記載の方法は溶液を吸引する1方法は開示しているものの、使い捨てチップを使用した溶液吸引法ではない。また、引用文献2では、ノズルを容器内の壁面に接触させて溶液の吸引を行っているため、ノズルを試料槽に接触させずに、試料槽ぎりぎりまで近づけて、試料槽を破壊又は、傷つけることなく、試料槽上に分注された溶液を残留液をできるだけ少なく吸引する方法についてはその記載も示唆もない。又、引用文献2には吸引動作に関する諸条件についても記述が無い。
本発明は、使い捨てチップの先端検出方法と使い捨てチップを用いた分注装置を提供することを目的とする。
本発明の局面に係る発明は、使い捨てチップをノズルに装着して分注を行う分注装置に適用される使い捨てチップの先端検出方法において、前記使い捨てチップが装着されたノズルをチップ先端検出器に移動させる工程と、該チップ先端検出器で前記使い捨てチップの先端位置を検出する工程とを備えたことを特徴とする。
本発明の他の局面に係る発明は、使い捨てチップを用いる分注装置において、前記使い捨てチップがノズルに装着された状態における前記使い捨てチップの先端位置を検出する先端位置検出手段を備えたことを特徴とする。
本発明によれば、チップの先端を正確に検出できるので、試料槽内の溶液を充分に吸引でき、残留液を少なくすることが出来る。また、吸引工程で、試料槽や試料槽内の固相担体を破損又は、傷つけることがない。更に、特許文献1のように使い捨てチップに印を付ける必要がない。
試料槽に対し、溶液を吸引する際のチップの位置や、溶液を吸引する速度(流速)及び、吸引量を具体的に定めることにより、試料槽上にある溶液を充分に吸引でき、残留液を少なくすることができる。
また、本願発明の局面によれば、チップを試料槽面や、壁面などの何処にも接触させないため、接触によるノズル、チップ間の勘合のゆるみや、ずれが発生しない。その為、ノズル、チップ間に漏れが発生することによるチップ先端からの液漏れや、吸引量不足などの分注不良を発生させることが無い。又、接触によってチップ先端位置がノズル軸に対し曲がってしまうことによる部品干渉も防ぐことができる。
また、チップ先端を試料槽面に接触させることで生ずるチップ先端の変形による不具合い(吸引不良、吐出不良、飛び散りによる装置の汚れや試料汚染等)も防ぐことができる。
図面を参照して本発明の実施の形態を説明する。図1は、本発明に係る分注装置を含む分注システムに係る図である。図1に示すように、本発明に係る分注システムは、分注装置26と、電装部59と、制御部(例えば、パーソナルコンピュータの本体)31とを含む。分注装置26の詳細は、図2に示す通りである。電装部59は、Z軸ドライバーコントローラー27と、Y軸ドライバーコントローラ28と、チップ先端位置センサーアンプ29と、X軸ドライバーコントローラ30とを備えている。制御部31には、例えば、入力装置として、キーボード34、ポインティングデバイス32が接続され、出力装置としてディスプレイ33や図示しないプリンタなどが接続される。
図2は、本発明に係る分注装置の全体図である。図2に記載の各部の説明は、動作の説明時に行うものとし、ここでは省略する。なお、本発明の一局面では、チップ先端位置センサー保持板10を介して、装置ベース板3から所定の高さに配置されたチップ先端位置検出センサー11を新たに備えている。
図2は、本発明に係る分注装置の全体図である。図2に記載の各部の説明は、動作の説明時に行うものとし、ここでは省略する。なお、本発明の一局面では、チップ先端位置センサー保持板10を介して、装置ベース板3から所定の高さに配置されたチップ先端位置検出センサー11を新たに備えている。
以下、主に図2を参照して、本発明に係る分注装置の動作を説明する。
(前準備)
1) オペレータは、使い捨てチップ6(以下、単に「チップ」と称する)と、液体状の試料(9:溶液試料。以下、単に「試料」と称する)が入った溶液容器8と、DNA反応容器15とを、分注装置26にセットする。
1) オペレータは、使い捨てチップ6(以下、単に「チップ」と称する)と、液体状の試料(9:溶液試料。以下、単に「試料」と称する)が入った溶液容器8と、DNA反応容器15とを、分注装置26にセットする。
2) 制御部31(モニター33等を含む)、分注装置26、及び電装部59の電源をオンにして、システムの立ち上げ(コンピュータのOS起動、制御プログラム起動、分注装置のメカイニシャライズ等)を行う。
(装置動作開始)
3) オペレータは制御部31に、分注動作を行う為の動作条件を入力した後に、分注動作の開始を指示する。この時、動作条件として、例えば、DNA反応容器15内に入れる試料9の量などを入力する。
以下、全ての動作は制御部31の指示によって行われる。なお、シリンジポンプ1は直接制御部31からの指示により動作するが、その他の駆動部(ノズルを昇降させるZ軸直動ロボット21、ノズルを所定の方向(図2に図示のY方向)に平行移動させるY軸直動ロボット18,チップスタンド5と溶液容器ラック7を同時にY軸と垂直な方向(図2における紙面と垂直な方向)に平行移動させるX軸直動ロボット4は、それぞれのドライバーコントローラー(27、28,30)を介して動作の指示がなされる。尚、制御部31と各駆動部との通信に係るインターフェイスは、例えばRS−232Cを使用する。
又、詳細は後述するチップ先端位置検出センサー11からの信号はチップ先端位置センサーアンプ29で増幅、A−D変換されて、制御部31に通知される。また、この場合の通信インターフェイスは、例えばTTL(Transistor-Transistor Logic)やRS−232Cである。
3) オペレータは制御部31に、分注動作を行う為の動作条件を入力した後に、分注動作の開始を指示する。この時、動作条件として、例えば、DNA反応容器15内に入れる試料9の量などを入力する。
以下、全ての動作は制御部31の指示によって行われる。なお、シリンジポンプ1は直接制御部31からの指示により動作するが、その他の駆動部(ノズルを昇降させるZ軸直動ロボット21、ノズルを所定の方向(図2に図示のY方向)に平行移動させるY軸直動ロボット18,チップスタンド5と溶液容器ラック7を同時にY軸と垂直な方向(図2における紙面と垂直な方向)に平行移動させるX軸直動ロボット4は、それぞれのドライバーコントローラー(27、28,30)を介して動作の指示がなされる。尚、制御部31と各駆動部との通信に係るインターフェイスは、例えばRS−232Cを使用する。
又、詳細は後述するチップ先端位置検出センサー11からの信号はチップ先端位置センサーアンプ29で増幅、A−D変換されて、制御部31に通知される。また、この場合の通信インターフェイスは、例えばTTL(Transistor-Transistor Logic)やRS−232Cである。
(チップ装着)
4) Y軸直動ロボット18を動作させて、Z軸直動ロボット21に搭載されているチップ6を装着していないノズル20をチップスタンド5上に配置された未使用のチップ6上に移動する。同じく、X軸直動ロボット4も動作し、チップスタンド5上に配置された未使用のチップ6上にノズル20を移動する。
尚、チップスタンド5上には、通常96本又は192本のチップ6が所定の間隔で格子状にセットされており、それぞれのチップ6の位置にはソフトウエアにてアドレス(例えば、#1,#2,#3、・・と割り当てられる)が割り当てられている。アドレスの管理と、当該アドレスにおけるチップの有無は制御部31で管理されている。更に、制御部31は、次に装着できるチップのアドレスも記憶している。チップ装着指示がキーボード34などから入力されると、制御部31は、次に装着できるチップのアドレスをY軸、X軸直動ロボット用ドライバー/コントローラー28,30に通知し、その指示に従って、Y軸、X軸直動ロボット18、4が移動する。
4) Y軸直動ロボット18を動作させて、Z軸直動ロボット21に搭載されているチップ6を装着していないノズル20をチップスタンド5上に配置された未使用のチップ6上に移動する。同じく、X軸直動ロボット4も動作し、チップスタンド5上に配置された未使用のチップ6上にノズル20を移動する。
尚、チップスタンド5上には、通常96本又は192本のチップ6が所定の間隔で格子状にセットされており、それぞれのチップ6の位置にはソフトウエアにてアドレス(例えば、#1,#2,#3、・・と割り当てられる)が割り当てられている。アドレスの管理と、当該アドレスにおけるチップの有無は制御部31で管理されている。更に、制御部31は、次に装着できるチップのアドレスも記憶している。チップ装着指示がキーボード34などから入力されると、制御部31は、次に装着できるチップのアドレスをY軸、X軸直動ロボット用ドライバー/コントローラー28,30に通知し、その指示に従って、Y軸、X軸直動ロボット18、4が移動する。
5) ノズル20が、装着すべきチップ6の上部に到達したら、Z軸直動ロボット21を下降して、ノズル20を所定量降下させ、チップ6の上部に押し込んで、ノズル20とチップ6(19)とを嵌合させて、チップ6をノズル20に装着する。この場合において、チップ54が正常にノズル46に装着された場合のそれぞれの断面図を図3に示す。
6) Z軸直動ロボット21が動作して、チップ19が装着されたノズル20を上点位置(原点センサー55位置:すなわち、ノズル20の下降前の位置)まで上昇させる。なお、以下の記載においては、X軸、Y軸、Z軸直動ロボットでチップ19が装着されたノズル20が移動するのであるが、単に、「チップ19が移動する」と表記する。
(溶液吸引)
7) Y軸直動ロボット18が動作することにより、チップ19が溶液容器ラック7にセットされた、溶液容器8上に移動する。同時に、X軸直動ロボット4も動作して、溶液容器ラック7上の所定の溶液容器8が、チップ19下に移動する。これらの動作により、チップ19内に吸引する予定の溶液9が入った溶液容器8が、チップ19の真下にレイアウトされる。
7) Y軸直動ロボット18が動作することにより、チップ19が溶液容器ラック7にセットされた、溶液容器8上に移動する。同時に、X軸直動ロボット4も動作して、溶液容器ラック7上の所定の溶液容器8が、チップ19下に移動する。これらの動作により、チップ19内に吸引する予定の溶液9が入った溶液容器8が、チップ19の真下にレイアウトされる。
8) シリンジポンプ1の弁41をチップ19側に切り替える。
9) Z軸直動ロボット21が動作することにより、チップ19が降下して、チップ19の先端の停止位置を溶液容器8の底にできるだけ近く、かつ、接触しない位置に停止させる。この停止位置は、種種の部品の製造精度、組み立て精度等を考慮し、必要な間隔を持たせた位置とする。
10) シリンジポンプ1を駆動し、チップ19内に溶液9を吸引する。吸引量は、例えば50μLである。
11) 吸引完了後、Z軸直動ロボット21を動作させて、チップ19を上点位置(原点センサー55位置)まで上昇させる。
(溶液吐出)
12) Y軸直動ロボット18を動作させて、溶液9を吸引した状態のチップ19をDNA反応容器15に設けられた試料槽16用穴部の上部に移動する。
12) Y軸直動ロボット18を動作させて、溶液9を吸引した状態のチップ19をDNA反応容器15に設けられた試料槽16用穴部の上部に移動する。
13) Z軸直動ロボット21を動作させて、溶液9を吸引した状態のチップ19をDNA反応容器15に設けられた試料槽16用穴部の上端部の高さまで降下させる。
14) シリンジポンプ1を駆動して、チップ19内の溶液9を、DNA反応容器15の試料槽16へ全量(例えば50μL)吐出する。
15) 吐出完了後、Z軸直動ロボット21を動作させて、チップ19を上点位置(原点センサー55位置)まで上昇させる。
(溶液反応)
16) DNA反応容器15内に分注された溶液17は、図示されていないヒータによって50℃程度に保温されながら、図示されていない溶液駆動手段によって、試料槽16に固定されている例えば図4に示すようなDNA反応容器60に設けられたDNAプローブ(DNAマイクロアレイ62に設けられた円上のスポット)とハイブリダイゼーション反応を開始する。
16) DNA反応容器15内に分注された溶液17は、図示されていないヒータによって50℃程度に保温されながら、図示されていない溶液駆動手段によって、試料槽16に固定されている例えば図4に示すようなDNA反応容器60に設けられたDNAプローブ(DNAマイクロアレイ62に設けられた円上のスポット)とハイブリダイゼーション反応を開始する。
(チップ取り外し)
17) Y軸直動ロボット18を動作させて、チップ19を、チップ及び廃棄箱13上に設けられたチップ取り外し板12近傍であって、チップ取り外し板12に接触せずにチップ19をチップ取り外し板12の下まで降下できる位置へ移動する。
17) Y軸直動ロボット18を動作させて、チップ19を、チップ及び廃棄箱13上に設けられたチップ取り外し板12近傍であって、チップ取り外し板12に接触せずにチップ19をチップ取り外し板12の下まで降下できる位置へ移動する。
18) Z軸直動ロボット21を動作させて、チップ19を、チップ19の上面がチップ取り外し板12より下になるまで降下させる。尚、この時、チップ19の上面と、チップ取り外し板12下面間は数ミリの間隔になるようにする。
19) Y軸直動ロボット18を動作させて、チップ19をチップ取り外し板12まで移動させる。
20) Z軸直動ロボット21を動作させて、チップ19を上点位置(原点センサー55位置)まで上昇させる。この際、チップ19上面がチップ取り外し板12下面とぶつかって、チップ19がノズル20から外れて、廃棄箱13内に収納される。
(チップ装着及び、チップ先端位置検出)
21) 工程4)〜6)を繰り返して、ノズル20に、チップ6を嵌合させる。
21) 工程4)〜6)を繰り返して、ノズル20に、チップ6を嵌合させる。
22) Y軸直動ロボット18を動作させて、チップ19を、チップ先端位置検出センサー11位置へ移動する。
尚、チップ先端位置センサーのセンサー光が配置されている高さ(G)は、高精度に位置決めされており、既知である。
尚、チップ先端位置センサーのセンサー光が配置されている高さ(G)は、高精度に位置決めされており、既知である。
23) Z軸直動ロボット21を動作させて、チップ19をチップ先端位置検出センサー11によって確実にチップ19が検出できる位置(例えば、詳細は後述する図7の(c)に示すような位置)まで降下させる。
この場合において、チップ19を降下させた時に、チップ先端位置検出センサー11でチップ19を検出している必要はない。尚、降下時のチップ先端位置と、チップ先端検出センサーの位置関係は、例えば、センサー光の中心より、チップ19の最大径程度下にチップ19の先端位置が来る程度である。
この場合において、チップ19を降下させた時に、チップ先端位置検出センサー11でチップ19を検出している必要はない。尚、降下時のチップ先端位置と、チップ先端検出センサーの位置関係は、例えば、センサー光の中心より、チップ19の最大径程度下にチップ19の先端位置が来る程度である。
24) この状態で、Y軸直動ロボット18を動作させ、チップ19を、図5に記述した様に移動させて、チップ19を検出できる状態にする。図5は、通常の光電センサーを使った場合のチップの中心をセンサー光に位置決めする動作例を示す図である。なお、図5は、上部方向からチップの動きを示している。図5において、例えば、図5の位置38にチップ19が降下したとすると、Y軸ロボットを動作させて、チップ19を位置38−1へ移動し、次に位置38−2へ移動する。ここで、位置38(D)から位置38−2(E)にチップ19を移動させたときにチップ19がセンサー光47を横切ったものとすれば、センサー光47の光量は図6に示すように変化する。図6に示すように、チップ19が位置Dから位置Eに移動した場合に、位置dの手前からセンサー光47の透過率が徐々に減少し(すなわち、遮蔽物を検知し)、最小値に至りチップ19の中心付近で一旦透過率が上昇する。そして、透過率は、再度減少して、再び最小値に至り、この後は徐々に増加して、位置eを過ぎた後は透過率が100%となり、チップ19を検出しない状態になる。なお、中央で小山が形成されているのは、チップのほぼ中央部において、チップにより散乱、反射する光が減り、チップを透過する光が増えることで形成される為である。ここで、位置dから位置eまでがチップが検出された状態となるので、位置dから位置eの略中央点がチップ19の中心軸位置と推測することが出来る。なお、図6に示すように、透過率が最小値を示している位置の中間点をチップ19の中心軸位置としてもかまわず、チップ19の中心軸位置をこの操作で決定できれば良い。なお、チップ19を下降させた場合に、その位置が位置39や位置40の場合についても上記の場合と同様に、位置39の場合には、位置39−1と位置39−2、位置40の場合には、位置40−1と位置40−2の間を移動させることにより、チップ19の中心位置を決定することができる。
尚、例えば、片側の移動距離、例えば38から38−1の最大値はチップ19の直径と同じ値とする。この理由は、チップ先端位置検出センサー11の上部にチップ19を移動して停止させる際に、チップ19の位置が略センサー光47の上部になるように設定されるからである。
また、設計値通りにY軸をセンサー位置に合わせ、チップ19を降下しても、チップ19を検出できないことがある。これは、
1) チップ装着時、チップ6の中心軸と、ノズル20の中心軸が一致していない為、チップ6がノズル20に傾いて嵌合する可能性があること。
2) チップ6の製造(射出成形)上の問題及び、保管上の問題によりチップ6そのものが曲がってしまう可能性があること。
3) 1)と2)の複合的要因によるもの。
の3点が要因として考えられる。その為、本工程の様な工程を実施しないと正しい、チップ先端位置を測定することができない。もし、上記のような原因でチップをDNA反応容器の穴の直径値動かしても、センサーでチップを検出することが出来なかった場合は、エラーとする。このようなときには、チップが正しく嵌合していない場合があるので、廃棄箱13へ廃棄する動作を行うと良い。このような場合には、チップスタンドのずれやチップそのもののずれ、Z軸のずれ、チップの不良などの何らかの不具合が発生してることが考えられるので、更に、装置のオペレータに対応を求めるようなメッセージを出力したり、警報を出力することが好ましい。特に、複数回繰り返してセンサーによりチップが検出できない場合は、不具合の程度が高いことが考えられるので、装置のオペレータに対応を求めるようなメッセージを出力したり、警報を出力することが重要である。なお、チップ先端位置検出センサー11の高さをチップ19を下げなくても検出できるような高さに設定しておけば、チップ19を下げる工程は不要になるが、上記の1)から3)のような場合に、正常に装着されたものとみなされる可能性がある。このような場合には、ノズル20は原点位置55よりも上部に移動可能とする必要がある。
このように、チップ先端位置検出センサー11が光電センサーの場合には、そのセンサー光は細いビーム状の平行光束の為、該ビーム内にチップ19を位置決めしないと検出することが出来ないので、センサー光とおおむね交差する位置(設計寸法)で確実にチップ19によりセンサー光を遮光できる高さまでノズル20を降下させ、次に、チップ19をY方向(プラムマイナス両方向に)に所定量移動させることで、確実にチップ19の位置を検出することが出来る。尚、移動量は実際のチップ19の位置が設計寸法からどの位ずれてしまうかで決定できるが、その最大値はDNA反応容器15に設けられた穴(内部に試料槽16がレイアウトされている)の直径値以下である。
尚、例えば、片側の移動距離、例えば38から38−1の最大値はチップ19の直径と同じ値とする。この理由は、チップ先端位置検出センサー11の上部にチップ19を移動して停止させる際に、チップ19の位置が略センサー光47の上部になるように設定されるからである。
また、設計値通りにY軸をセンサー位置に合わせ、チップ19を降下しても、チップ19を検出できないことがある。これは、
1) チップ装着時、チップ6の中心軸と、ノズル20の中心軸が一致していない為、チップ6がノズル20に傾いて嵌合する可能性があること。
2) チップ6の製造(射出成形)上の問題及び、保管上の問題によりチップ6そのものが曲がってしまう可能性があること。
3) 1)と2)の複合的要因によるもの。
の3点が要因として考えられる。その為、本工程の様な工程を実施しないと正しい、チップ先端位置を測定することができない。もし、上記のような原因でチップをDNA反応容器の穴の直径値動かしても、センサーでチップを検出することが出来なかった場合は、エラーとする。このようなときには、チップが正しく嵌合していない場合があるので、廃棄箱13へ廃棄する動作を行うと良い。このような場合には、チップスタンドのずれやチップそのもののずれ、Z軸のずれ、チップの不良などの何らかの不具合が発生してることが考えられるので、更に、装置のオペレータに対応を求めるようなメッセージを出力したり、警報を出力することが好ましい。特に、複数回繰り返してセンサーによりチップが検出できない場合は、不具合の程度が高いことが考えられるので、装置のオペレータに対応を求めるようなメッセージを出力したり、警報を出力することが重要である。なお、チップ先端位置検出センサー11の高さをチップ19を下げなくても検出できるような高さに設定しておけば、チップ19を下げる工程は不要になるが、上記の1)から3)のような場合に、正常に装着されたものとみなされる可能性がある。このような場合には、ノズル20は原点位置55よりも上部に移動可能とする必要がある。
このように、チップ先端位置検出センサー11が光電センサーの場合には、そのセンサー光は細いビーム状の平行光束の為、該ビーム内にチップ19を位置決めしないと検出することが出来ないので、センサー光とおおむね交差する位置(設計寸法)で確実にチップ19によりセンサー光を遮光できる高さまでノズル20を降下させ、次に、チップ19をY方向(プラムマイナス両方向に)に所定量移動させることで、確実にチップ19の位置を検出することが出来る。尚、移動量は実際のチップ19の位置が設計寸法からどの位ずれてしまうかで決定できるが、その最大値はDNA反応容器15に設けられた穴(内部に試料槽16がレイアウトされている)の直径値以下である。
25) Y軸直動ロボット18の制御信号(Y軸直動ロボット用ドライバーとコントローラー28より得ることができる)と、チップ先端位置検出センサー11の出力とに基づいて制御部31の演算によって得られたチップ19の中心軸位置に、Y軸直動ロボット18を動作させて、チップ19を移動する。この移動により、チップ19の中心軸とチップ先端検出センサー中心軸はおおむね直交していることとなる。尚、チップ19を移動することにより、チップ先端位置検出センサー11はチップ19を検出した状態になる。この状態を図7の(c)に示す。図7の(c)に示すように、発光部36から出射されたセンサー光48はチップ19により遮光されてその一部分(光49)のみが受光部37に受光された状態になる。
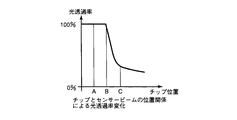
26) この状態からZ軸直動ロボット21を動作させて、チップ19と共に1ステップ上昇する。この場合において、ステップ幅は、Z軸直動ロボット制御信号の最小単位に従い、例えば、0.05mm程度である。チップの上昇後、チップ先端位置検出センサー11の出力を確認し、チップ19を検出し続けている場合(図7の(c)や(b)のような状態の場合)は、さらに1ステップ上昇させる。この動作を、チップ19を検出しなくなる(図7の(a)のような状態)まで続ける。図7の(a)〜(c)に対応するセンサー光の透過率を図8のそれぞれA〜Cに示す。チップ19を検出しなくなったZ軸位置を第1の仮のチップ先端位置とする。尚、Z軸位置はZ軸直動ロボット21の制御信号(Z軸直動ロボット用ドライバーとコントローラー27)より得ることができる。
27) 工程23)〜26)をもう一度繰り返し、第2の仮のチップ先端位置を測定する。第1と第2の仮のチップ先端位置の値が所定の範囲内(例えば、0.05mm以内)で一致した場合は、第1の仮のチップ先端位置を測定されたチップ先端位置とする。
尚、第1と第2の仮のチップ先端位置の値が所定の範囲内に入らなかった場合は、チップ19の嵌合が斜めであるか、チップ19が曲がっている可能性がある為、一旦Z軸直動ロボット21を動作させ、19と共に上点位置(原点センサー55位置)まで上昇させる。次に、工程17)〜20)を行い、チップ19を取り外し、さらに、工程21)以降を行う。
なお、チップ先端位置検出センサー11ではチップの真の先端位置を検出することはできず、必ずオフセット量Iが発生する。オフセット量Iは、チップ先端位置検出センサー11により、安定して検出できるチップ先端近傍位置から、実際の先端位置までのオフセット距離であって、チップ先端位置検出センサー11の検出感度、設定、ビーム光径、チップ19の光透過率、形状等の条件により決定される。なお、これらの条件が一定である場合は、オフセット量Iの値は設計上の許容範囲内で一定である。
尚、第1と第2の仮のチップ先端位置の値が所定の範囲内に入らなかった場合は、チップ19の嵌合が斜めであるか、チップ19が曲がっている可能性がある為、一旦Z軸直動ロボット21を動作させ、19と共に上点位置(原点センサー55位置)まで上昇させる。次に、工程17)〜20)を行い、チップ19を取り外し、さらに、工程21)以降を行う。
なお、チップ先端位置検出センサー11ではチップの真の先端位置を検出することはできず、必ずオフセット量Iが発生する。オフセット量Iは、チップ先端位置検出センサー11により、安定して検出できるチップ先端近傍位置から、実際の先端位置までのオフセット距離であって、チップ先端位置検出センサー11の検出感度、設定、ビーム光径、チップ19の光透過率、形状等の条件により決定される。なお、これらの条件が一定である場合は、オフセット量Iの値は設計上の許容範囲内で一定である。
28) Z軸直動ロボット21を動作させて、チップ19を、上点位置(原点センサー55位置)まで上昇させる。
(廃液吸引)
29) 工程16)から開始したハイブリダイゼーション反応を終了させる。なお、反応時間は、当該ハイブリダイゼーション反応に必要充分な時間である。
29) 工程16)から開始したハイブリダイゼーション反応を終了させる。なお、反応時間は、当該ハイブリダイゼーション反応に必要充分な時間である。
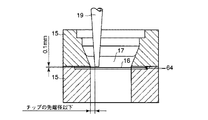
30) Y軸直動ロボット18を動作させ、先端位置を測定したチップ19を、DNA反応容器15に設けられた試料槽16用穴部の上に移動する。尚、厳密には、図9に示すように、チップ19を試料槽用穴部縁近傍(試料槽壁面とチップ先端部外周との距離はチップ先端径以下)で溶液を吸引することが好ましい。この理由は、以下の通りである。
穴の縁(試料槽壁面と試料槽面で構成される隅)の方が、DNA反応容器15に対する各種溶液が持つ付着力(ぬれること)により、ぬれ性が高いとき溶液17が試料槽16壁面をのぼり、溶液17表面が凹面になる。又、チップ19を溶液17内に降下させると、ぬれ性が高いときチップ表面に対する溶液17の付着力により、溶液17はチップ19の外側をのぼる。さらに、チップ19を試料槽16の穴の縁近傍に降下させることで、試料槽16壁面、チップ19壁面間で毛管現象が起こり、より溶液17が集まることになる。従って、より多くの溶液17を吸引できるのである。尚、この場合において、より多くの溶液17を吸引するために、溶液17の付着力を利用するので、DNA反応容器15やチップ19の表面は有る程度ぬれやすい方が好ましい。無論、溶液17の付着力が強すぎると吸引したい溶液17がDNA反応容器15やチップ19の表面からはがれにくくなり、より多くの溶液17を吸引することは出来なくなってしまう。溶液17の持つ表面張力と溶液17が持つ付着力のバランスが必要である。今回の実施例で使用したDNA反応容器15はポリカーボネイト樹脂を使用した射出成型品である。試料槽16は酸化アルミニウム製の多孔質膜である。溶液17は核酸溶液である。又、DNA反応容器15、チップ19の材質としては上記に記入した以外にポリスチレン、ポリエチレン、塩化ビニール、ポリアセタール、ポリメチルペンテン、ポリエチレンテレフタレート等の熱可塑性樹脂も使用することが出来る。なお、図9において、符号64は、試料槽補強版である。
穴の縁(試料槽壁面と試料槽面で構成される隅)の方が、DNA反応容器15に対する各種溶液が持つ付着力(ぬれること)により、ぬれ性が高いとき溶液17が試料槽16壁面をのぼり、溶液17表面が凹面になる。又、チップ19を溶液17内に降下させると、ぬれ性が高いときチップ表面に対する溶液17の付着力により、溶液17はチップ19の外側をのぼる。さらに、チップ19を試料槽16の穴の縁近傍に降下させることで、試料槽16壁面、チップ19壁面間で毛管現象が起こり、より溶液17が集まることになる。従って、より多くの溶液17を吸引できるのである。尚、この場合において、より多くの溶液17を吸引するために、溶液17の付着力を利用するので、DNA反応容器15やチップ19の表面は有る程度ぬれやすい方が好ましい。無論、溶液17の付着力が強すぎると吸引したい溶液17がDNA反応容器15やチップ19の表面からはがれにくくなり、より多くの溶液17を吸引することは出来なくなってしまう。溶液17の持つ表面張力と溶液17が持つ付着力のバランスが必要である。今回の実施例で使用したDNA反応容器15はポリカーボネイト樹脂を使用した射出成型品である。試料槽16は酸化アルミニウム製の多孔質膜である。溶液17は核酸溶液である。又、DNA反応容器15、チップ19の材質としては上記に記入した以外にポリスチレン、ポリエチレン、塩化ビニール、ポリアセタール、ポリメチルペンテン、ポリエチレンテレフタレート等の熱可塑性樹脂も使用することが出来る。なお、図9において、符号64は、試料槽補強版である。
31) 図10に示すように、Z軸直動ロボット21を動作させて、先端位置を検出したチップ19をDNA反応容器15に設けられた試料槽16の表面よりもF(チップ先端と試料槽間の距離)だけ間隔をあけた高さまで降下させる。この際、チップ位置は試料槽に接触しないものの、ほぼF=0となるまで降下させることが、吸引出来る溶液量を増やす上で重要である。図11はチップ先端と試料槽面間距離を変化させ、試料槽面上に残った液体量を測定したグラフである。チップ先端と試料槽面との距離が増えるにつれて、残液量が増えてくることが判る。チップ先端と試料槽面との距離が0.2mm以下であれば、反応容器内の残液量はほぼ同じである。従って、種々の部品公差や組み立て公差を考慮した場合に、チップ先端と試料槽面との距離が略0.2mm以下であれば、実質上問題なく使用することができる。しかし、チップが試料槽に接触してしまった場合、試料槽に傷を付ける又は、試料槽自体を割ってしまう為、必ずFは0mmより大きい必要がある。従って、この時の降下量は、試料槽のレイアウトされた高さをH±J(Jは、試料台14、DNA反応容器15、試料槽16のそれぞれの寸法公差のプラス側合計値)とした場合、誤差がない場合にはG−Hで求められ、誤差を考慮するとG−H−I−Jで求められる。尚、試料槽高さの公差プラス側合計Jは、実際の場合、全ての部品が寸法公差プラス側限界値に揃うことは有り得ない為、チップ19によって試料槽を破壊又は、接触させない為の安全値として設定する。従って、ほぼ確実にFの値は0mmより大きくなる(例えば、Fの値は0.1mm程度になる様に設計する)。
32) シリンジポンプ1を動作させて、試料槽16上の溶液17を吸引する。尚、吸引量は、工程14)で吐出した溶液量の少なくとも1.2倍(好ましくは、1.4倍)以上で、かつ、チップの容量を上限とする。吸引速度は、例えば8μL/秒以下の極めてゆっくりした速度とし、溶液の粘性や表面張力を利用し、溶液を可能な限り多く吸引できる様にする。尚、今回使用したチップ19は、容量200μL、材質はポリプロピレン製の一般的なチップである。図12は吸引速度を変化させ、試料槽面上に残った液体量を測定したグラフである。吸引速度が8μL/秒より速くなると、残液量が増えてくることが判る。図13はDNA反応容器15内からチップ19が溶液を吸引していく状態を試料槽16上方から観察した図である。左より、次のように状態が変化している。まず最初に、DNA反応容器15内に溶液17が入っている状態において、チップ19を所定の位置に降下させる(a)。この状態で、吸引を開始すると、液面は下がっていくが、まだ溶液は試料槽面全体を覆っている(b)。更に吸引を継続していくと、試料槽16の中央あたりから試料槽面65が現れてくる(c)。更に吸引を継続すると、溶液量が少なくなり試料槽面がかなり現れてくる(d)。この時溶液は、チップ先端に付着した状態で吸引され続けている。吸引を続けていると、チップ先端の周囲に溶液が無くなり、先端のみに溶液が存在している状態になる。このとき、シリンジポンプにより更に吸引を続けても、試料槽面65へ溶液が付着する力があるので、この力に打ち勝たないとチップ内容液の動きが止まり、チップ内に溶液は吸引できない。従って、チップ内の溶液に動きが止まった時点でシリンジポンプの吸引を止めて、チップを上昇させると、チップ先端部の溶液が試料槽面65に残ってしまう。そこで、試料槽面65へ溶液が付着する力に打ち勝ち、チップ先端部の溶液もできる限り吸引できるように、溶液17の吸引量を、試料槽16上に分注された溶液量の少なくとも1.2倍以上、より好ましくは1.4倍以上とすることが好ましい。吸引量をこのように設定することにより、吸引が完了した時点で、試料槽面上の溶液はほぼ吸引され、試料槽壁面と試料槽面で構成される隅にリング状の溶液66がわずか残っている状態になる(e)。
33) シリンジポンプ1の動作が完了した後、所定の時間動作を止めて放置する。これは、シリンジポンプ1、弁41、テフロンチューブ25、ノズル20、チップ19内の圧力が安定するまでの時間である。
34) Z軸直動ロボット21を動作させて、溶液を吸引したチップ19を上点位置(原点センサー55位置)まで上昇させる。
(廃液、チップ取り外し)
35) Y軸直動ロボット18を動作させて、チップ19を、チップ及び廃棄箱13上に設けられたチップ取り外し板12近傍であって、チップ取り外し板12に接触せずにチップ19をチップ取り外し板12下まで降下できる位置へ移動する。
35) Y軸直動ロボット18を動作させて、チップ19を、チップ及び廃棄箱13上に設けられたチップ取り外し板12近傍であって、チップ取り外し板12に接触せずにチップ19をチップ取り外し板12下まで降下できる位置へ移動する。
36) Z軸直動ロボット21を動作させて、チップ19を、チップ19の上面がチップ取り外し板12より下になるまで降下させる。尚、この時、チップ19の上面と、チップ取り外し板12下面間は数ミリの間隔になるようにする。
37) シリンジポンプ1を動作させ、チップ19内の溶液を廃棄箱13内に吐出する。このときの吐出量は工程32)で吸引した全量とする。チップ19を取り外す前に、チップ19内を空にする理由は以下のとおりである。チップ19を取り外す際、チップ19内に溶液が入っていると、取り外す時のチップ19内容量の増大によって、チップ19先端から空気が流入し、チップ19内液がノズル内に逆流する恐れがある。それを防止する為に、チップ19を取り外す前に、チップ19内を空にしておく必要がある。なお、チップ19を取り外す工程39)の時に、シリンジポンプを動作させて、チップ内部を陽圧に保ち、溶液を吐出しながらチップ19を取り外すようにしても、チップ19内液がノズル20内に逆流する事を防止できる。
38) Y軸直動ロボット18を動作させて、チップ19をチップ取り外し板12まで移動させる。
39) Z軸直動ロボット21を動作させて、チップ19を上点位置(原点センサー55位置)まで上昇させる。この際、チップ19上面がチップ取り外し板12下面とぶつかって、チップ19がノズル20から外れて、廃棄箱13内に収納される。
(洗浄)
40) 上記(チップ装着)後、溶液容器ラック7にセットされている図示されていない洗浄バッファーを(溶液吸引)し、(溶液吐出)、図示されていない溶液駆動手段によって溶液駆動による洗浄、(チップ取り外し)、(チップ装着及び、チップ先端位置検出)、(廃液吸引)、(廃液、チップ取り外し)の各工程を行うことで、ハイブリダイゼーション反応後の洗浄を行う。尚、洗浄作業は、数種類の洗浄バッファーを取り替えながら数回行うこともできる。又、同じ洗浄バッファーを使って数回繰り返すこともできる。
40) 上記(チップ装着)後、溶液容器ラック7にセットされている図示されていない洗浄バッファーを(溶液吸引)し、(溶液吐出)、図示されていない溶液駆動手段によって溶液駆動による洗浄、(チップ取り外し)、(チップ装着及び、チップ先端位置検出)、(廃液吸引)、(廃液、チップ取り外し)の各工程を行うことで、ハイブリダイゼーション反応後の洗浄を行う。尚、洗浄作業は、数種類の洗浄バッファーを取り替えながら数回行うこともできる。又、同じ洗浄バッファーを使って数回繰り返すこともできる。
(測光)
41) DNA反応容器15は、図示していない測光部に運ばれ(又は、分注装置にレイアウトされている場合もある)、ハイブリダイゼーション結果が光学的に測光される。
41) DNA反応容器15は、図示していない測光部に運ばれ(又は、分注装置にレイアウトされている場合もある)、ハイブリダイゼーション結果が光学的に測光される。
上記の各実施形態から下記の発明が抽出できる。なお、下記の各発明は単独で適用しても良いし、適宜組み合わせて適用しても良い。
本発明の一局面に係る使い捨てチップの先端検出方法は、使い捨てチップをノズルに装着して分注を行う分注装置に適用される使い捨てチップの先端検出方法において、前記使い捨てチップが装着されたノズルをチップ先端検出器に移動させる工程と、該チップ先端検出器で前記使い捨てチップの先端位置を検出する工程とを備えたことを特徴とする。本局面において、下記の実施態様が好ましい。
(1) 前記チップ先端検出器が光電センサーであること。
(2) (1)において、前記使い捨てチップの先端位置を検出する工程は、光電センサーのセンサー用ビーム光より下までチップの先端を降下させる工程と、チップを水平方向に少なくとも1往復に移動させてチップを検出する工程と、前記チップの検出位置で前記チップを垂直方向に移動し、チップを検出できなくなった位置をチップ先端位置と決定する工程とを有すること。
(3) (1)又は(2)において、前記チップを用いて試料槽上の液体を吸引する工程を更に備え、試料槽上の液体を吸引する工程において、既知であるチップの先端位置を検出する為のセンサーからのビーム光中心位置をG、既知である吸引される液体が乗せられた試料槽上面高さをH、検出されたチップ先端位置と実際のチップ先端位置とのオフセット値をI、試料槽上面高さが製造上持つ寸法公差の合計値をJとしたときに、チップを試料槽上面の近傍まで降下させる降下量を、チップ先端位置検出センサーによって検出されたチップ先端位置を基準として、数式G−H−I−Jで求めること。
(1) 前記チップ先端検出器が光電センサーであること。
(2) (1)において、前記使い捨てチップの先端位置を検出する工程は、光電センサーのセンサー用ビーム光より下までチップの先端を降下させる工程と、チップを水平方向に少なくとも1往復に移動させてチップを検出する工程と、前記チップの検出位置で前記チップを垂直方向に移動し、チップを検出できなくなった位置をチップ先端位置と決定する工程とを有すること。
(3) (1)又は(2)において、前記チップを用いて試料槽上の液体を吸引する工程を更に備え、試料槽上の液体を吸引する工程において、既知であるチップの先端位置を検出する為のセンサーからのビーム光中心位置をG、既知である吸引される液体が乗せられた試料槽上面高さをH、検出されたチップ先端位置と実際のチップ先端位置とのオフセット値をI、試料槽上面高さが製造上持つ寸法公差の合計値をJとしたときに、チップを試料槽上面の近傍まで降下させる降下量を、チップ先端位置検出センサーによって検出されたチップ先端位置を基準として、数式G−H−I−Jで求めること。
本発明の他の局面に係る分注装置は、使い捨てチップを用いる分注装置において、前記使い捨てチップがノズルに装着された状態における前記使い捨てチップの先端位置を検出する先端位置検出手段を備えたことを特徴とする。本局面において、下記の実施態様が好ましい。
(1) 前記先端位置検出手段は、前記使い捨てチップの先端位置との接触により、或いは前記使い捨てチップの先端位置と非接触で前記使い捨てチップの先端位置を検出すること。
(1) 前記先端位置検出手段は、前記使い捨てチップの先端位置との接触により、或いは前記使い捨てチップの先端位置と非接触で前記使い捨てチップの先端位置を検出すること。
(2) (1)において、前記先端位置検出手段は、光電センサー、磁気センサー、天秤、又はTVカメラのいずれかであること。
(3) 前記先端位置検出手段が光電センサーの場合において、光電センサーからのビーム光よりチップの先端位置が下になるまでチップを降下させ、チップを水平方向に少なくとも1往復方向に移動させてチップ位置を検出し、前記チップの検出位置で、垂直方向にチップを移動し、チップを検出できなくなった位置をチップ先端位置と決定すること。
(4) 前記先端位置検出手段が光電センサーの場合において、前記チップを用いて試料槽上の液体を吸引する場合において、既知であるチップの先端位置を検出する為のセンサーからのビーム光中心位置をG、既知である吸引される液体が乗せられた試料槽上面高さをH、検出されたチップ先端位置と実際のチップ先端位置とのオフセット値をI、試料槽上面高さが製造上持つ寸法公差の合計値をJとしたときに、チップを試料槽上面の近傍まで降下させる降下量を、チップ先端位置検出センサーによって検出されたチップ先端位置を基準として、数式G−H−I−Jで求めること。
(5) 前記先端位置検出手段でチップを検出できなかった場合、チップとノズルの嵌合又は、チップ自身、又は、チップ先端位置検出センサーが正しくないとしてエラーを出力すること。
(6) 前記先端位置検出手段が、既知であるZ軸直動ロボットの原点位置と、チップ先端位置検出センサーによって検出されたチップ先端位置との距離が、所定の値より短いことを検出した場合は、チップとノズルの嵌合が正しくないとしてエラーを出力すること。
本発明は、上記各実施の形態に限られることはない。例えば、図14に示すように、チップ先端位置検出センサー11として帯状光センサーを使用しても良い。この場合には、発光部44と受光部35との間の光45が帯状になっているので、例えば、チップ19が位置51〜53のいずれの位置であっても検出が可能であって、チップ19の先端は、Z軸直動ロボット21でチップ19を上昇させることによって、その面積が徐々に小さくなり、最終的に、チップ19を検出しなくなるので、当該位置をチップ19の先端位置とすればよい。このように、帯状光センサーを使用することによりチップ19をY方向に動かさなくても、チップを検出することが可能となる。
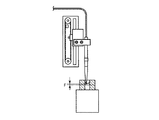
また、上記の実施の形態では、チップ先端位置検出センサー11を装置ベース板3に取り付けているが、チップ先端位置検出センサー11(57)をZ軸に取り付けてもかまわない。図15に、保持板58を介してチップ先端位置検出センサー57を取り付けた例を示す。このように配置することにより、Z軸位置がY方向のどの位置にあっても、必要時にノズルを上下させることで、チップの先端位置及びチップとノズルとの嵌合確認が可能となる。ただし、Y軸18と装置ベース板3が平行にレイアウトされている必要がある。
また、上記の実施の形態では、チップ先端位置検出センサーとして光電センサーを例にとって説明したが、これに限らず、例えば、チップが金属製であれば磁気センサーであっても良いし、ほかに接触型のセンサーを用いることも可能である。また、TVカメラをチップ先端位置検出センサー11の位置に設置し、チップ先端を撮像して、その画像処理によってチップの先端位置を検出しても良い。また、チップが電流を通すことができる材質であれば、通電状態を検出すればよい。更に、天秤のように、重さを感知できるセンサーを用いて、接触の有無によりチップの先端の位置を検出することもできる。
更に、上記の実施の形態では、チップの先端位置の検出(測定)を2回の動作で行ったが、1回でも、3回以上であっても良い。なお、チップの先端位置の検出は2回以上であることが好ましい。
また、上記実施の形態はDNA反応容器を例にとって説明したが、蛋白分析容器、抗原抗体反応容器、生化学反応容器などにも、応用可能である。
その他、実施段階ではその要旨を逸脱しない範囲で種々の変形を実施し得ることが可能である。さらに、上記各実施形態には、種々の段階の発明が含まれており、開示される複数の構成要件における適宜な組合せにより種々の発明が抽出され得る。
また、例えば各実施形態に示される全構成要件から幾つかの構成要件が削除されても、発明が解決しようとする課題の欄で述べた課題が解決でき、発明の効果で述べられている効果が得られる場合には、この構成要件が削除された構成が発明として抽出され得る。
1…シリンジポンプ、3…装置ベース板、4…X軸直動ロボット、5…チップスタンド、6…チップ、7…溶液容器ラック、8…溶液容器、9…溶液(試料)、10…チップ先端位置センサー保持板、11…チップ先端位置検出センサー、12…板、13…廃棄箱、14…試料台、15…DNA反応容器、16…試料槽、17…溶液、18…Y軸直動ロボット、19…チップ、20…ノズル、21…Z軸直動ロボット、25…テフロンチューブ、26…分注装置、27…Z軸ドライバーコントローラー、28…Y軸ドライバーコントローラ、29…チップ先端位置センサーアンプ、30…X軸ドライバーコントローラ、31…制御部、32…ポインティングデバイス、33…ディスプレイ、34…キーボード、35…受光部、36…発光部、37…受光部、38…位置、39…位置、40…位置、41…弁、44…発光部、45…光、46…ノズル、47…センサー光、48…センサー光、51〜53…位置、54…チップ、55…原点位置、57…チップ先端位置検出センサー、58…保持板、59…電装部、60…DNA反応容器、64…試料槽補強板、65…試料槽面、66…試料槽面上に残った溶液。
Claims (16)
- 使い捨てチップをノズルに装着して分注を行う分注装置に適用される使い捨てチップの先端検出方法において、
前記使い捨てチップが装着されたノズルをチップ先端検出器に移動させる工程と、
該チップ先端検出器で前記使い捨てチップの先端位置を検出する工程とを備えたことを特徴とする使い捨てチップの先端検出方法。 - 請求項1に記載の使い捨てチップの先端検出方法において、前記チップ先端検出器が光電センサーであることを特徴とする使い捨てチップの先端検出方法。
- 請求項2に記載の使い捨てチップの先端検出方法において、前記使い捨てチップの先端位置を検出する工程は、
光電センサーのセンサー用ビーム光より下までチップの先端を降下させる工程と、
チップを水平方向に少なくとも1往復に移動させてチップを検出する工程と、
前記チップの検出位置で前記チップを垂直方向に移動し、チップを検出できなくなった位置をチップ先端位置と決定する工程とを有することを特徴とする使い捨てチップの先端検出方法。 - 請求項2又は請求項3に記載の使い捨てチップの先端検出方法において、前記チップを用いて試料槽上の液体を吸引する工程を更に備え、
試料槽上の液体を吸引する工程において、既知であるチップの先端位置を検出する為のセンサーからのビーム光中心位置をG、既知である吸引される液体が乗せられた試料槽上面高さをH、検出されたチップ先端位置と実際のチップ先端位置とのオフセット値をI、試料槽上面高さが製造上持つ寸法公差の合計値をJとしたときに、チップを試料槽上面の近傍まで降下させる降下量を、チップ先端位置検出センサーによって検出されたチップ先端位置を基準として、数式G−H−I−Jで求めることを特徴とする使い捨てチップの先端検出方法。 - 使い捨てチップを用いる分注装置において、前記使い捨てチップがノズルに装着された状態における前記使い捨てチップの先端位置を検出する先端位置検出手段を備えたことを特徴とする分注装置。
- 請求項5に記載の分注装置において、前記先端位置検出手段は、前記使い捨てチップの先端位置との接触により、或いは前記使い捨てチップの先端位置と非接触で前記使い捨てチップの先端位置を検出することを特徴とする分注装置。
- 請求項6に記載の分注装置において、前記先端位置検出手段は、光電センサー、磁気センサー、又はTVカメラのいずれかであることを特徴とする分注装置。
- 請求項5から請求項7のいずれか1項に記載の分注装置において、前記先端位置検出手段が光電センサーの場合において、光電センサーからのビーム光よりチップの先端位置が下になるまでチップを降下させ、チップを水平方向に少なくとも1往復方向に移動させてチップ位置を検出し、前記チップの検出位置で、垂直方向にチップを移動し、チップを検出できなくなった位置をチップ先端位置と決定することを特徴とする分注装置。
- 請求項5から請求項8のいずれか1項に記載の分注装置において、前記先端位置検出手段が光電センサーの場合において、前記チップを用いて試料槽上の液体を吸引する場合において、既知であるチップの先端位置を検出する為のセンサーからのビーム光中心位置をG、既知である吸引される液体が乗せられた試料槽上面高さをH、検出されたチップ先端位置と実際のチップ先端位置とのオフセット値をI、試料槽上面高さが製造上持つ寸法公差の合計値をJとしたときに、チップを試料槽上面の近傍まで降下させる降下量を、チップ先端位置検出センサーによって検出されたチップ先端位置を基準として、数式G−H−I−Jで求めることを特徴とする分注装置。
- 請求項5から請求項9のいずれか1項に記載の分注装置において、前記先端位置検出手段でチップを検出できなかった場合、チップとノズルの嵌合又は、チップ自身、又は、チップ先端位置検出センサーが正しくないとしてエラーを出力することを特徴とする分注装置。
- 請求項5から請求項9のいずれか1項に記載の分注装置において、前記先端位置検出手段が、既知であるZ軸直動ロボットの原点位置と、チップ先端位置検出センサーによって検出されたチップ先端位置との距離が、所定の値より短いことを検出した場合は、チップとノズルの嵌合が正しくないとしてエラーを出力することを特徴とする分注装置。
- 請求項5から請求項11のいずれか1項に記載の分注装置において、前記チップ先端と試料槽壁面との距離が略チップ先端の径以下かつ試料槽面との距離が所定値となるように、前記チップ先端の位置を設定して、溶液を吸引することを特徴とする分注装置。
- 請求項12に記載の分注装置において、前記溶液を吸引する流速は8μL/秒以下の速度であることを特徴とする分注装置。
- 請求項12に記載の分注装置において、前記溶液の吸引量は、前記試料槽上に分注された溶液の量の少なくとも1.2倍以上、かつ、チップの容量以下であることを特徴とする分注装置。
- 請求項12に記載の分注装置において、前記チップ先端と前記試料槽面との距離が略0.2mm以下であることを特徴とする分注装置。
- 請求項12に記載の分注装置において、前記チップは先端部に向かって細くなるようなテーパ形状をなしており、前記試料槽壁面は、前記試料槽面に向かって、前記チップと干渉しないような角度で形成されていることを特徴とする分注装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004090066A JP2005201882A (ja) | 2003-12-16 | 2004-03-25 | 使い捨てチップの先端検出方法と使い捨てチップを用いた分注装置 |
| PCT/JP2004/018963 WO2005059568A1 (en) | 2003-12-16 | 2004-12-13 | Method of detecting tip of disposable pipette tip and a dispensing apparatus using a disposable pipette tip |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003418265 | 2003-12-16 | ||
| JP2004090066A JP2005201882A (ja) | 2003-12-16 | 2004-03-25 | 使い捨てチップの先端検出方法と使い捨てチップを用いた分注装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2005201882A true JP2005201882A (ja) | 2005-07-28 |
Family
ID=34703279
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004090066A Withdrawn JP2005201882A (ja) | 2003-12-16 | 2004-03-25 | 使い捨てチップの先端検出方法と使い捨てチップを用いた分注装置 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP2005201882A (ja) |
| WO (1) | WO2005059568A1 (ja) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009025533A (ja) * | 2007-07-19 | 2009-02-05 | Denso Corp | 表示画面調整装置 |
| JP2014048293A (ja) * | 2012-08-31 | 2014-03-17 | F. Hoffmann-La Roche Ag | 可搬式チップ廃棄ラック |
| CN105548117A (zh) * | 2016-01-05 | 2016-05-04 | 苏州市职业大学 | 一种带试管高度检测的原子荧光光度计 |
| JP2016212077A (ja) * | 2015-05-11 | 2016-12-15 | 株式会社安川電機 | 分注用のラック及び分注システム |
| WO2017043192A1 (ja) * | 2015-09-09 | 2017-03-16 | 株式会社 日立ハイテクノロジーズ | 自動分析装置 |
| WO2017221775A1 (ja) | 2016-06-21 | 2017-12-28 | コニカミノルタ株式会社 | 反応方法、ならびにこれを行う反応システムおよび反応装置 |
| WO2022014076A1 (ja) * | 2020-07-14 | 2022-01-20 | 株式会社日立製作所 | 位置検出装置 |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102004025588B4 (de) * | 2004-05-25 | 2006-12-28 | Lre Technology Partner Gmbh | Dosierspitzenaufnehmer zur Aufnahme einer Dosierspitze |
| JP5275182B2 (ja) * | 2009-09-11 | 2013-08-28 | 株式会社日立ハイテクノロジーズ | 分注装置及び分析装置 |
| US9046507B2 (en) | 2010-07-29 | 2015-06-02 | Gen-Probe Incorporated | Method, system and apparatus for incorporating capacitive proximity sensing in an automated fluid transfer procedure |
| FR3015039B1 (fr) | 2013-12-12 | 2017-02-24 | Stago Diagnostica | Procede de determination de la position d'au moins un pion de cartographie |
| EP3677916B1 (en) * | 2018-01-26 | 2023-07-12 | Hitachi High-Tech Corporation | Automated analyzer |
| LU103303B1 (en) * | 2024-05-14 | 2025-11-14 | Stratec Se | Method for the positioning of pipett tips |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0341438A3 (en) * | 1988-05-13 | 1990-11-28 | Abbott Laboratories | Pneumatic sensing system |
| US5141871A (en) * | 1990-05-10 | 1992-08-25 | Pb Diagnostic Systems, Inc. | Fluid dispensing system with optical locator |
| WO1993025914A1 (en) * | 1992-06-08 | 1993-12-23 | Behring Diagnostics, Inc. | Liquid dispensing system |
| DE19923222C2 (de) * | 1999-05-20 | 2001-11-22 | Jandratek Gmbh | Verfahren zum genauen Positionieren mindestens einer Pipette in einer Analyseeinrichtung |
-
2004
- 2004-03-25 JP JP2004090066A patent/JP2005201882A/ja not_active Withdrawn
- 2004-12-13 WO PCT/JP2004/018963 patent/WO2005059568A1/en not_active Ceased
Cited By (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009025533A (ja) * | 2007-07-19 | 2009-02-05 | Denso Corp | 表示画面調整装置 |
| JP2014048293A (ja) * | 2012-08-31 | 2014-03-17 | F. Hoffmann-La Roche Ag | 可搬式チップ廃棄ラック |
| US10697991B2 (en) | 2015-05-11 | 2020-06-30 | Kabushiki Kaisha Yasakawa Denki | Dispensing system, and dispensing method |
| JP2016212077A (ja) * | 2015-05-11 | 2016-12-15 | 株式会社安川電機 | 分注用のラック及び分注システム |
| JPWO2017043192A1 (ja) * | 2015-09-09 | 2018-06-28 | 株式会社日立ハイテクノロジーズ | 自動分析装置 |
| WO2017043192A1 (ja) * | 2015-09-09 | 2017-03-16 | 株式会社 日立ハイテクノロジーズ | 自動分析装置 |
| CN105548117B (zh) * | 2016-01-05 | 2018-11-06 | 苏州市职业大学 | 一种带试管高度检测的原子荧光光度计 |
| CN105548117A (zh) * | 2016-01-05 | 2016-05-04 | 苏州市职业大学 | 一种带试管高度检测的原子荧光光度计 |
| WO2017221775A1 (ja) | 2016-06-21 | 2017-12-28 | コニカミノルタ株式会社 | 反応方法、ならびにこれを行う反応システムおよび反応装置 |
| US12102996B2 (en) | 2016-06-21 | 2024-10-01 | Otsuka Pharmaceutical Co., Ltd. | Reaction method, and reaction system and reaction device implementing same |
| WO2022014076A1 (ja) * | 2020-07-14 | 2022-01-20 | 株式会社日立製作所 | 位置検出装置 |
| JP2022017728A (ja) * | 2020-07-14 | 2022-01-26 | 株式会社日立製作所 | 位置検出装置 |
| JP7421436B2 (ja) | 2020-07-14 | 2024-01-24 | 株式会社日立製作所 | 位置検出装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2005059568A1 (en) | 2005-06-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5255265B2 (ja) | 洗浄装置および自動分析装置 | |
| JP2005201882A (ja) | 使い捨てチップの先端検出方法と使い捨てチップを用いた分注装置 | |
| WO2018164006A1 (ja) | ピペットチップ先端検知装置、ピペットチップ先端検知プログラム | |
| US11422143B2 (en) | Sample measuring apparatus and sample measuring method | |
| JP6854292B2 (ja) | 自動分析装置 | |
| JPWO2011086635A1 (ja) | 自動分析装置 | |
| JP5093164B2 (ja) | サンプリング機構 | |
| JP6607787B2 (ja) | 自動分析装置 | |
| JP2009058318A (ja) | 自動分析装置 | |
| CN101377522B (zh) | 自动分析装置 | |
| CN110291405A (zh) | 自动分析装置和自动分析装置中的清洗机构 | |
| JP2010071766A (ja) | 分注装置、自動分析装置および分注不良確認方法 | |
| JP2005201769A (ja) | 分析装置 | |
| JP5337619B2 (ja) | 自動分析装置及び分注装置の制御方法 | |
| JP4416579B2 (ja) | 自動分析装置 | |
| JP2007322285A (ja) | 分注装置 | |
| JP2009085616A (ja) | 自動分析装置及び自動分析装置における液体試料の分注制御方法 | |
| JP5111328B2 (ja) | 自動分析装置 | |
| JPWO2011093347A1 (ja) | 自動分析装置 | |
| JP2010271203A (ja) | 液体のサンプリング方法、及び自動分析装置 | |
| WO2025197528A1 (ja) | 自動分析装置 | |
| JP5259550B2 (ja) | 自動分析装置およびサンプル分注方法 | |
| JP5487275B2 (ja) | 自動分析装置 | |
| JP2008256566A (ja) | 分注装置および自動分析装置 | |
| JPH1090281A (ja) | ピペッティング方法、ピペッティング装置、および記憶媒体 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A300 | Withdrawal of application because of no request for examination |
Free format text: JAPANESE INTERMEDIATE CODE: A300 Effective date: 20070605 |