JP2005291356A - 転がり軸受の解析方法及び解析システム - Google Patents
転がり軸受の解析方法及び解析システム Download PDFInfo
- Publication number
- JP2005291356A JP2005291356A JP2004106881A JP2004106881A JP2005291356A JP 2005291356 A JP2005291356 A JP 2005291356A JP 2004106881 A JP2004106881 A JP 2004106881A JP 2004106881 A JP2004106881 A JP 2004106881A JP 2005291356 A JP2005291356 A JP 2005291356A
- Authority
- JP
- Japan
- Prior art keywords
- rolling bearing
- analysis
- load
- rolling
- contact
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images









Landscapes
- Rolling Contact Bearings (AREA)
- Shafts, Cranks, Connecting Bars, And Related Bearings (AREA)
Abstract
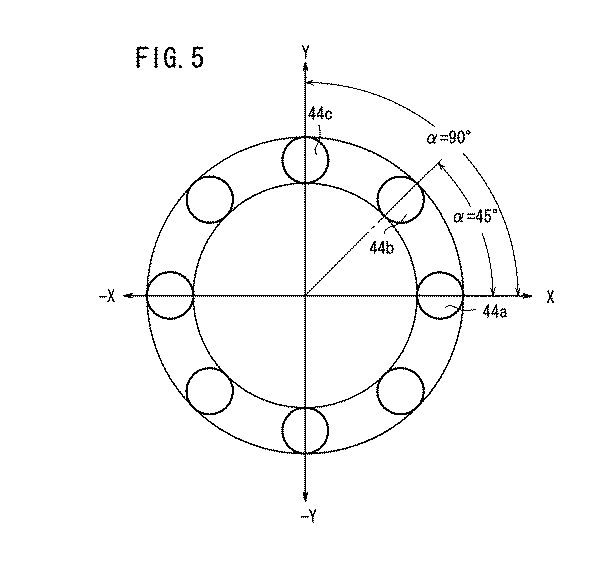
【解決手段】転がり軸受におけるボール44の位置と、該ボール44における接触点を含むアキシャル平面である仮想断面S2を特定する(ステップS5)。ボール44の仮想断面S2上における接触荷重fiを求める(ステップS6)。ボール44の仮想断面S2上における減衰を求める(ステップS7)。各ボール44について仮想断面S2、接触荷重fi及び減衰を求めた後(ステップS8)、各接触荷重fi及び各減衰を合成して合成荷重ベクトルF及び合成トルクベクトルTを求める(ステップS9)。合成荷重ベクトルF及び合成トルクベクトルTから6軸周りの荷重を求める(ステップS10)。
【選択図】図7
Description
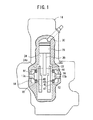
16…クランクシャフト 17a、17b…ジャーナル部
18…クランクケース 20…コネクティングロッド
22…クランクピン 24a、24b…ウェブ
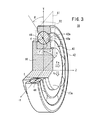
40…内輪 40a、42a…軌道面
42…外輪 44…ボール
50…解析システム 58…本体
66…転がり軸受特性作成部 68…主計算部
70…プリプロセッサ部 72…線形静解析部
74…コンタクトプロセッサ部 80…汎用機構解析プログラム
82…解析ソルバ
f、fi…接触荷重 func…接触関数
D1…有限要素法データ D2…節点剛性データ
D3…解析モデルデータ F…合成荷重ベクトル
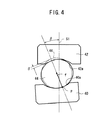
P…接触点 T…合成トルクベクトル
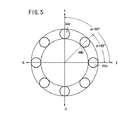
α…公転角度 β、βi…接触角
δ、δi…貫通量
Claims (5)
- 略同軸の内輪及び外輪と、前記内輪と前記外輪の間に転がり可能に設けられた複数の転動体とを有する転がり軸受の解析方法において、
前記各転動体の仮想断面上における接触荷重を求める工程と、
前記各接触荷重を合成して合成荷重ベクトル及び合成トルクベクトルを求める工程と、
を有することを特徴とする転がり軸受の解析方法。 - 請求項1記載の転がり軸受の解析方法において、
前記仮想断面は、前記転動体が前記内輪又は前記外輪と接触する接触点を含むアキシャル平面であることを特徴とする転がり軸受の解析方法。 - 請求項1記載の転がり軸受の解析方法において、
前記接触荷重は関数で求められ、該関数は解析プログラムにソルバとして組み込まれることを特徴とする転がり軸受の解析方法。 - 請求項1記載の転がり軸受の解析方法において、
前記転がり軸受の弾性的な特性を含む有限要素法モデルに対して前記合成荷重ベクトル及び前記合成トルクベクトルを作用させ、前記転がり軸受又は該転がり軸受に軸支されるシャフトの所定の箇所における変位又は歪みを求めることを特徴とする転がり軸受の解析方法。 - 略同軸の内輪及び外輪と、前記内輪と前記外輪の間に転がり可能に設けられた複数の転動体とを有する転がり軸受の解析システムにおいて、
前記各転動体のアキシャル平面上における接触荷重を求める手段と、
前記各接触荷重を合成して合成荷重ベクトル及び合成トルクベクトルを求める手段と、
を有し、
前記アキシャル平面は、前記転動体が前記内輪又は前記外輪と接触する接触点を含む平面であることを特徴とする転がり軸受の解析システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004106881A JP4723202B2 (ja) | 2004-03-31 | 2004-03-31 | 転がり軸受の変位解析方法及び変位解析システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004106881A JP4723202B2 (ja) | 2004-03-31 | 2004-03-31 | 転がり軸受の変位解析方法及び変位解析システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005291356A true JP2005291356A (ja) | 2005-10-20 |
| JP4723202B2 JP4723202B2 (ja) | 2011-07-13 |
Family
ID=35324515
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004106881A Expired - Lifetime JP4723202B2 (ja) | 2004-03-31 | 2004-03-31 | 転がり軸受の変位解析方法及び変位解析システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4723202B2 (ja) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007298458A (ja) * | 2006-05-02 | 2007-11-15 | Ntn Corp | 遊星運動下の転がり軸受の動力学解析方法 |
| JP2008116040A (ja) * | 2006-10-13 | 2008-05-22 | Ntn Corp | 保持器の応力解析方法および応力解析システム |
| JP2009533615A (ja) * | 2006-04-11 | 2009-09-17 | エーツェーツェーインジェニーア エクスペルテンチームズ ゲーエムベーハー イー.ゲー. | 往復ピストン機関 |
| JP2010152653A (ja) * | 2008-12-25 | 2010-07-08 | Jtekt Corp | 構造物の剛性の解析方法 |
| CN109027017A (zh) * | 2018-08-15 | 2018-12-18 | 重庆交通大学 | 一种空间滚动轴承磨损状态评估方法 |
| CN110516290A (zh) * | 2019-07-12 | 2019-11-29 | 徐州美驰车桥有限公司 | 一种球回转支承的有限元分析方法 |
| CN111209705A (zh) * | 2020-01-15 | 2020-05-29 | 同济大学 | 一种基于有限元的玻璃升降器三维柔性装配公差预测方法 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11573154B2 (en) | 2019-12-13 | 2023-02-07 | Caterpillar Inc. | System and method for estimating ring-related parameters |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2003087745A2 (de) * | 2002-04-11 | 2003-10-23 | Fag Kugelfischer Ag & Co. Kg | Wälzlager mit sensoren |
-
2004
- 2004-03-31 JP JP2004106881A patent/JP4723202B2/ja not_active Expired - Lifetime
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2003087745A2 (de) * | 2002-04-11 | 2003-10-23 | Fag Kugelfischer Ag & Co. Kg | Wälzlager mit sensoren |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009533615A (ja) * | 2006-04-11 | 2009-09-17 | エーツェーツェーインジェニーア エクスペルテンチームズ ゲーエムベーハー イー.ゲー. | 往復ピストン機関 |
| JP2007298458A (ja) * | 2006-05-02 | 2007-11-15 | Ntn Corp | 遊星運動下の転がり軸受の動力学解析方法 |
| JP2008116040A (ja) * | 2006-10-13 | 2008-05-22 | Ntn Corp | 保持器の応力解析方法および応力解析システム |
| JP2010152653A (ja) * | 2008-12-25 | 2010-07-08 | Jtekt Corp | 構造物の剛性の解析方法 |
| CN109027017A (zh) * | 2018-08-15 | 2018-12-18 | 重庆交通大学 | 一种空间滚动轴承磨损状态评估方法 |
| CN109027017B (zh) * | 2018-08-15 | 2019-12-10 | 重庆交通大学 | 一种空间滚动轴承磨损状态评估方法 |
| CN110516290A (zh) * | 2019-07-12 | 2019-11-29 | 徐州美驰车桥有限公司 | 一种球回转支承的有限元分析方法 |
| CN110516290B (zh) * | 2019-07-12 | 2022-10-21 | 徐州美驰车桥有限公司 | 一种球回转支承的有限元分析方法 |
| CN111209705A (zh) * | 2020-01-15 | 2020-05-29 | 同济大学 | 一种基于有限元的玻璃升降器三维柔性装配公差预测方法 |
| CN111209705B (zh) * | 2020-01-15 | 2024-04-26 | 同济大学 | 一种基于有限元的玻璃升降器三维柔性装配公差预测方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4723202B2 (ja) | 2011-07-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Xu et al. | Modeling and analysis of planar multibody systems containing deep groove ball bearing with clearance | |
| Montazersadgh et al. | Dynamic load and stress analysis of a crankshaft | |
| Flores et al. | Numerical and experimental investigation on multibody systems with revolute clearance joints | |
| Dubowsky et al. | An experimental and analytical study of impact forces in elastic mechanical systems with clearances | |
| Erkaya | Effects of balancing and link flexibility on dynamics of a planar mechanism having joint clearance | |
| Sun et al. | Dynamic analysis of the variable stiffness support rotor system with elastic rings | |
| Xu et al. | An approach for calculating the dynamic load of deep groove ball bearing joints in planar multibody systems | |
| Liu et al. | Establishment of dynamic model for axle box bearing of high-speed trains under variable speed conditions | |
| Liu et al. | Investigation on characteristics of vibration interaction between supporting bearings in rotor-bearing system | |
| JP4723202B2 (ja) | 転がり軸受の変位解析方法及び変位解析システム | |
| He et al. | Dynamic analysis of rolling bearings with roller spalling defects based on explicit finite element method and experiment | |
| Ba et al. | Analysis of piston-pin lubrication considering the effects of structure deformation and cavitation | |
| Shi et al. | Dynamic modeling considering time-varying contact pairs and parameterized defects of deep groove ball bearings for its vibration characteristic analysis | |
| Yuan et al. | Analysis of dynamic characteristics of gas turbine rotor considering contact effects and pre-tightening force | |
| Xu | A general method for impact dynamic analysis of a planar multi-body system with a rolling ball bearing joint | |
| Chen et al. | Clearance-induced contact trajectory uncertainty of angular contact ball bearing under coupling operating condition | |
| Bellakhdhar et al. | A simplified coupled crankshaft–engine block model | |
| Wang et al. | Study on torsional vibration response of compressor flexible rotor system considering collision clearance | |
| Wang et al. | Lubrication analysis of a connecting-rod bearing in a high-speed engine. Part I: rod and bearing deformation | |
| Ganguly et al. | Balancing optimization of a motorcycle engine crankshaft for vibration reduction | |
| Kim et al. | Excitation force analysis of a powertrain based on CAE technology | |
| Szumiński | Determination of the stiffness of rolling kinematic pairs of manipulators | |
| Siano et al. | Simulation of a multi-cylinder engine vibrational behaviour | |
| Duran et al. | Dynamic simulation and endurance limit safety factor calculation for crankshaft-comparison of single mass and dual mass flywheel | |
| Pan et al. | Unified model of rub-impact vibration response of high-low pressure double-rotor-SFD-intermediate bearing system of aero-engine under typical maneuvering loads |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20061129 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090901 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20091030 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100330 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100430 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20101005 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110105 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20110111 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110329 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110407 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140415 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |