JP2005291826A - 慣性センサ - Google Patents
慣性センサ Download PDFInfo
- Publication number
- JP2005291826A JP2005291826A JP2004105207A JP2004105207A JP2005291826A JP 2005291826 A JP2005291826 A JP 2005291826A JP 2004105207 A JP2004105207 A JP 2004105207A JP 2004105207 A JP2004105207 A JP 2004105207A JP 2005291826 A JP2005291826 A JP 2005291826A
- Authority
- JP
- Japan
- Prior art keywords
- magnetic field
- sensor
- sensitive element
- inertial sensor
- elastic member
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
- 230000005291 magnetic effect Effects 0.000 claims abstract description 97
- 239000000919 ceramic Substances 0.000 claims abstract description 10
- 238000001514 detection method Methods 0.000 claims description 37
- 230000008859 change Effects 0.000 claims description 21
- 230000005284 excitation Effects 0.000 claims description 3
- 230000001133 acceleration Effects 0.000 abstract description 34
- 230000005415 magnetization Effects 0.000 description 11
- 239000010408 film Substances 0.000 description 10
- 238000005452 bending Methods 0.000 description 6
- 230000000694 effects Effects 0.000 description 4
- 230000035945 sensitivity Effects 0.000 description 4
- 238000006073 displacement reaction Methods 0.000 description 3
- 238000004519 manufacturing process Methods 0.000 description 3
- 230000010287 polarization Effects 0.000 description 3
- 230000005290 antiferromagnetic effect Effects 0.000 description 2
- 230000006866 deterioration Effects 0.000 description 2
- 239000000696 magnetic material Substances 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 239000002184 metal Substances 0.000 description 2
- 235000002017 Zea mays subsp mays Nutrition 0.000 description 1
- 241000482268 Zea mays subsp. mays Species 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 244000145845 chattering Species 0.000 description 1
- 239000011248 coating agent Substances 0.000 description 1
- 238000000576 coating method Methods 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 239000011347 resin Substances 0.000 description 1
- 229920005989 resin Polymers 0.000 description 1
- 229910052710 silicon Inorganic materials 0.000 description 1
- 239000010703 silicon Substances 0.000 description 1
- 239000000758 substrate Substances 0.000 description 1
- 230000002459 sustained effect Effects 0.000 description 1
- 239000010409 thin film Substances 0.000 description 1
Images






Landscapes
- Hall/Mr Elements (AREA)
Abstract
【課題】シンプルな構造で小型化が容易な慣性センサを提供する。
【解決手段】 加速度センサ1は、センサ本体3と検出手段5とを含む。検出手段は、弾性部材17と磁場方向感応素子19と磁場発生素子21とを備え、弾性部材はその両端部においてセンサ本体により挟持される。磁場方向感応素子は、スピンバルブ型GMR素子であって、弾性部材における可動部に取り付けられ、磁場発生素子は、センサ本体における磁場方向感応素子と対向する位置に取り付けられている。また、センサ本体は、弾性部材を挟持する左右一対の保持枠7、9と、それらを挟持する上下一対の天板11、13とを含み、保持枠及び天板はセラミックで構成されている。
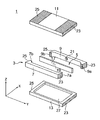
【選択図】 図1
【解決手段】 加速度センサ1は、センサ本体3と検出手段5とを含む。検出手段は、弾性部材17と磁場方向感応素子19と磁場発生素子21とを備え、弾性部材はその両端部においてセンサ本体により挟持される。磁場方向感応素子は、スピンバルブ型GMR素子であって、弾性部材における可動部に取り付けられ、磁場発生素子は、センサ本体における磁場方向感応素子と対向する位置に取り付けられている。また、センサ本体は、弾性部材を挟持する左右一対の保持枠7、9と、それらを挟持する上下一対の天板11、13とを含み、保持枠及び天板はセラミックで構成されている。
【選択図】 図1
Description
本発明は、慣性センサに関するものである。
慣性センサの一つである加速度センサには、従来、機械的構造タイプ、圧電タイプが知られている。機械的構造タイプとしては、例えば、特開2002−365307号公報に開示されたものがある。このセンサでは、慣性力によって移動する慣性体を有し、慣性力に応じて慣性体が可動接点を動かす動作を電気的にとらえて加速度をセンシングしていた。
圧電タイプとしては、例えば、特開平6−273439号公報に開示されたものがある。このセンサでは、バイモルフ型の検出素子の両端が固定されて用いられる。また、バイモルフ型の検出素子は、中央部分と両端部分との三部分に区分され、且つ、中央部分と両端部分との分極方向が逆に設定される。そして、加速度によって検出素子が撓んだ際の信号を検出することによって加速度をセンシングしていた。
しかしながら、上述した機械的構造タイプの加速度センサは、接点などの可動部の磨耗やチャタリングが生じる問題があり、また、概して構造が複雑化し小型化が困難である場合が多かった。一方、圧電タイプの加速度センサでは、次のような問題あった。すなわち、第一に、分極度の劣化による感度低下が生じる。第二に、錘を付けるなどの特別な措置を施さなければ低周波の衝撃信号や加速度信号を検出することができない。第三に、圧電素子が有する焦電効果に起因するポップコーンノイズによって検出特性に影響が生じる。第四に、PZT圧電セラミックが破損するため、レンジを大きく採ることが困難である。第五に、変位が生じた瞬間にのみ検出信号が得られるだけで、一定の持続的変位状態を検出できないという問題点もあった。
特開2002−365307号公報
特開平6−273439号公報
本発明の課題は、シンプルな構造で小型化が容易な慣性センサを提供することである。
本発明の別の課題は、部品点数が少なく組み立てが容易な慣性センサを提供することである。
本発明のさらに別の課題は、磨耗や破損などに強い慣性センサを提供することである。
本発明のさらに別の課題は、ダイナミックレンジの広い慣性センサを提供することである。
本発明のさらに別の課題は、検出感度の高い慣性センサを提供することである。
本発明のさらに別の課題は、経時変化の少ない慣性センサを提供することである。
上述した課題を解決するため、本発明に係る慣性センサは、センサ本体と、検出手段とを含む慣性センサであって、前記検出手段は、支持部材と、磁場感応素子と、磁場発生素子とを備え、前記支持部材は、両端部において前記センサ本体に対して保持されており、前記磁場感応素子は、前記支持部材に取り付けられ、前記磁場発生素子は、前記センサ本体に取り付けられている。
また、同課題を解決するための本発明に係る別の慣性センサは、センサ本体と、検出手段とを含む慣性センサであって、前記検出手段は、支持部材と、磁場感応素子と、磁場発生素子とを備え、前記支持部材は、両端部において前記センサ本体に対して保持されており、前記磁場発生素子は、前記支持部材に取り付けられ、前記磁場感応素子は、前記センサ本体に取り付けられている。
このような構成によれば、可動部品としては、支持部材と、それと一体的な磁場感応素子又は磁場発生素子とを用いるだけであり、極めてシンプルな構造で検出を行うことができ、センサの構造簡易化や小型化を図ることができる。
さらに、可動部品の他の部位への当接を伴わないため、磨耗や衝撃などによる損傷を回避することができる。さらに、支持部材としては、従来のように圧電セラミックを使用する必要がなく、弾性強度の十分な部材を使用することができるため、ダイナミックレンジを広くすることができる。
また、前記磁場感応素子は、スピンバルブ型GMR素子でなり、膜面にほぼ平行な面内における磁場の相対的な方向変化を捉えるか、該膜面にほぼ垂直な面内における磁場の相対的な方向変化を捉えるようにしてもよい。
これによれば、磁場感応素子の検出特性が外部磁場の方向に依存し、外部磁場の大きさには依存しないため、磁場発生素子の保持力低下に起因した経時変化を呈することがないという利点を得ることができる。
また、前記支持部材は、直交2軸方向の加振力に応答するように配置されているとよい。
このような構成によれば、2軸センサとして機能することが可能である。
また、前記磁場感応素子の検出出力は、前記センサ本体の両端部から取り出されるようにしてもよい。
このような構成によれば、慣性センサの基板への取り付けが好適に行える。
前記センサ本体は、前記支持部材を挟持する左右一対の保持枠と、該一対の保持枠を挟持する上下一対の天板とを含み、前記一対の保持枠及び一対の天板はセラミックで構成されていてもよい。
これによれば、支持部材、保持枠及び天板という極めて少ない部品点数から加速度センサを構成することができるので、構造のシンプル化、小型化、組み立ての容易化、製造・組み立て時のコスト低減を図ることができる。
本発明の他の特徴及びそれによる作用効果は、添付図面を参照し、実施の形態によって更に詳しく説明する。
以下、この発明に係る慣性センサを加速度センサとして実施した場合の実施の形態を添付図面に基づいて説明する。なお、図中、同一符号は同一又は対応部分を示すものとする。
図1は、本実施の形態に係る加速度センサの分解斜視図である。加速度センサ1は、センサ本体3と、検出手段5とを備えている。さらに、センサ本体3は、左右一対の保持枠7、9と、上下一対の天板11、13とを備えている。また、検出手段5は、弾性部材(支持部材)17と、磁場方向感応素子(磁場感応素子)19と、磁場発生素子21とを備えている。なお、説明に用いる方向は、図1中に示したX方向を左右方向とし、Y方向を前後方向、Z方向を上下方向として行うものとする。
センサ本体3を構成する保持枠7、9は、平面視コ字状の部材であり、凹面を相互に内側に向けた状態に配置される。また、保持枠7、9は、本実施の形態ではセラミックで構成されている。保持枠7、9の両端部には、磁場方向感応素子19の検出出力を取り出すための端部電極23、25が形成されている。
天板11、13は、平板状の部材であり、本実施の形態ではセラミックによって構成されている。上側の天板11の下面及び下側の天板13の上面にはそれぞれ、弾性部材17の動作を阻害しないように凹部27が形成されている。天板11、13は、かかる凹部27を相互に内側に向けた状態に配置される。また、天板11、13の両端部にも、磁場方向感応素子19の検出出力を取り出すための端部電極23、25が形成されている。
検出手段5を構成する弾性部材17は、短冊状に構成された平板部材であり、前後方向に最も長く延び、左右方向の厚みが薄く形成されている。弾性部材17は、樹脂、セラミック、シリコン、金属などで構成することができる。金属で構成する場合には、絶縁処理を施して使用する。また、弾性部材17は、その両側面が、慣性センサの取り付け面B(図3参照)に対して直交するような状態で保持されている。
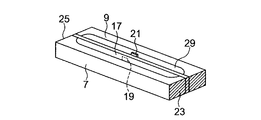
図2は、天板を除いた保持枠及び検出手段に関する斜視図であり、図3及び図4はそれぞれ、加速度センサの正面図及び平面図である。図1〜図4に示されるように、弾性部材17は、反対方向を指向する前後の両端部において左右一対の保持枠7、9によって挟持されている。具体的には、弾性部材17の前後両端(従って固定端となる)が、保持枠7、9の前側において内側へ突出する端面(以下、前側突出端面と称する)7a、9aと、後側において内側へ突出する端面(以下、後側突出端面と称する)7b、9bとによって挟持される。
一対の保持枠7、9の間に弾性部材17が挟持された状態では、保持枠7、9の間に撓みスペース29が確保される。弾性部材17は、撓みスペース29内で前後方向に延長している。保持枠7、9及び弾性部材17は、組み上がった状態で、突出部のない六面体を構成する。
弾性部材17の可動部に、すなわち本実施の形態ではより感度が向上するように前後方向中央部より若干後ろ寄りの位置に、磁場方向感応素子19が取り付けられている。磁場方向感応素子19には、スピンバルブ型GMR素子が用いられている。磁場方向感応素子19は、板状の弾性部材17の右側面に貼付されている。また、当該素子19の一つの出力線T1は、図4に一点鎖線で示されるように、弾性部材17の右側面に沿って後側へと延長し、後側の端部電極25に接続しており、もう一つの出力線T2は、図4に二点鎖線で示されるように、弾性部材17の右側面に沿って前側へと延長し、前側の端部電極23に接続する。このように本実施の形態では、磁場方向感応素子19の検出出力をセンサ本体の両端部から取り出すにあたって、スルーホールを用いずに簡単に配線することができる。なお、各図面においては、視認性や説明の明瞭性を優先するため、磁場方向感応素子19や磁場発生素子21を誇張して描画している。
右側の保持枠9の内向き凹面における、磁場方向感応素子19と対向する位置には、磁場発生素子21が取り付けられている。磁場発生素子21としては、本実施の形態では小型の磁石が用いられるが、本発明はこれに限定されず、塗布型磁性体、薄膜型磁性体など、磁化物であれば広く適用することができる。磁場発生素子21と磁場方向感応素子19とは、慣性力の無負荷状態において離隔するように配置されている。
本実施の形態においては、保持枠7、9の前側突出端面7a、9a及び後側突出端面7b、9b、保持枠7、9の内向き凹面の底面、並びに、弾性部材17の左右両側面はすべて平行となるように形成され組立てられている。
保持枠7、9及び弾性部材17の上下面は、対応する一対の天板11、13によって覆われている。保持枠7、9の間に形成された撓みスペース29の上方及び下方には、天板11、13の凹部27によって画定される余剰空間が広がっている。
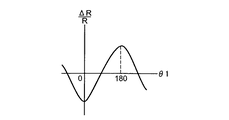
ここで、磁場方向感応素子19としてのスピンバルブ型GMR素子の抵抗特性について、図5〜図7を参照しながら説明する。スピンバルブ型GMR素子は、図5に示されるように、基本的には、自由回転層19a、Cu層19b、ピン層19c、反強磁性層19dからなる四層構成を備える。ピン層の磁化方向Pは、反強磁性層19dとの磁気結合によって固定されている。これに対して、磁場方向感応素子19の膜面と平行な面内において回転するような外部磁化が作用した場合、その抵抗特性は、図6に示されるようになる。横軸は、外部磁化方向H及びピン層磁化方向Pとの成す角度θ1であり、縦軸は、抵抗値の変化率ΔR/Rである。一方、磁場方向感応素子19の膜面と垂直な面内において回転するような外部磁化が作用した場合、その抵抗特性は、図7に示されるようになる。横軸は、外部磁化方向V及びピン層磁化方向Pとの成す角度θ2であり、縦軸は、抵抗値の変化率ΔR/Rである。このように、スピンバルブ型GMR素子は、磁場方向の変化を抵抗値の変化として捉えることができる。
次に、以上のように構成された加速度センサ1の作用について説明する。加速度センサ1は、例えば、携帯用電子機器に組み込まれるハードディスクドライブや光ディスクドライブなどにおける加速度検出対象部に取り付けられる。加速度検出対象部に外力などが作用していない、すなわち無負荷状態においては、図4に示されるように、弾性部材17は前後方向にまっすぐ延長しており、弾性部材17の左右両側面と保持枠7、9の凹面とは平行にほぼ等間隔を保って維持されている。
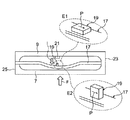
次に、図8に示されるように、加速度検出対象部に外力Fが作用すると、その力は、加速度検出対象部に一体的に固定された加速度センサ1のセンサ本体3にも作用する。一方、両端で挟持された弾性部材17には、外力に起因した慣性力Iが作用する。弾性部材17は、かかる慣性力Iによって、例えば図8に示されるように中央部が最も撓み量が大きくなるように湾曲する。これによって、弾性部材17の可動部に固定された磁場方向感応素子19は、磁場発生素子21に対して変位・傾斜する。
このとき、弾性部材17の可動部の動作はX−Y平面内における曲げ運動であるため、磁場方向感応素子19からみると、磁場発生素子21から生じる磁場の方向の変化は、磁場方向感応素子19の膜面(Y−Z平面)と直交する面(X−Y平面)内で回転する現象として捉えられる。よって、磁場方向感応素子19においては、図7に示したような、磁場方向の変化に対応する抵抗値変化が現れる。この抵抗値変化は、電流値の変化として、前述した出力線T1、T2及び厚膜電極として形成された端部電極23、25を介して取り出される。そして、電流値の変化から外力に起因した加速度を検出することができる。
以上のように、本実施の形態では、可動部品としては弾性部材17及びそれと一体的な磁場方向感応素子19だけの極めてシンプルな構造で加速度の検出を行うことができる。また、加速度センサ1全体としても、磁場方向感応素子19を有する弾性部材17、磁場発生素子21を有する保持枠7、9及び天板11、13という極めて少ない部品点数から構成されているので、構造のシンプル化、小型化、組み立ての容易化、製造・組み立て時のコスト低減を達成することができた。
また、可動部品の他の部位への当接を伴わないため、磨耗や衝撃などによる損傷を回避することができる。さらに、弾性部材としては、従来のように圧電セラミックを使用する必要がなく、弾性強度の十分な部材を使用することができるため、ダイナミックレンジを広くすることができる。
また、検出手段として磁場方向感応素子を用いているため、圧電素子のような分極度の劣化の問題が生じることなく、検出感度の良好なセンシングを維持できる。さらに、スピンバルブ型GMR素子における抵抗値の変化特性は、外部磁場の方向に依存し、外部磁場の大きさには依存しないため、磁場発生素子の保持力低下に起因した経時変化を受けずに済む。
また、磁場方向感応素子19は、両端挟持状態の弾性部材17の最大撓み部である中央部近傍に取り付けられているため、曲げによる振幅の大きい位置で加速度の検出が行え、精密な検出を行える。さらに、磁場方向感応素子19を振幅の大きい可動部に取り付けている態様であっても、弾性部材17の側面を用いて検出出力を取り出すことにより、センサ本体3の両端部から出力を行うことが可能となっている。
また、磁場方向感応素子19と磁場発生素子21との相対変位による磁場変化を捉える検出態様であるため、DC成分より使用することができる。さらに、上述の構成より、小型低背の構成を採ることができ、近年求められている表面実装型センサのニーズにも応えることができる。また、保持枠7、9や天板11、13は、セラミックで構成されているため、上述した形態に構成するにあたって大量生産時の加工性を向上させることができた。
なお、本実施の形態では、スピンバルブ型GMR素子のピン層の磁化方向は、図8の部分拡大斜視図E1において符号Pで示されるように設定されており、すなわち、磁場方向感応素子19の膜面(感応面)がY−Z平面と平行に指向されていたが、これに代えて次のような態様であってもよい。図8の部分拡大斜視図E2に示されるように磁場方向感応素子19を配置し、磁場方向感応素子19の膜面(感応面)のピン層磁化方向PをX−Y平面と平行に指向させてもよい。その場合、外部磁場の相対的な変化は、磁場方向感応素子19の感応面(X−Y平面)と平行な面(X−Y平面)内で回転する現象として捉えられる。よって、磁場方向感応素子19においては、図6に示したような、磁場方向の変化に対応する抵抗値変化が現れる。
次に、本発明の他の実施の形態について、図9及び図10を参照しながら説明する。本実施の形態は、磁場方向感応素子の感応面や弾性部材の向き及びそれに伴う構造以外の部分については、図1〜図5で示される上記実施の形態と同様であるものとする。図9及び図10は、図1(天板は省略)及び図3に対応する図である。
本実施の形態の加速度センサ101は、高さ方向に対して傾斜した弾性部材117を有する。弾性部材117は、左右一対の側面117a、117bが慣性センサの取り付け面B(図10参照)に対して傾いて交差するように、すなわち、平行でも垂直でもない関係となるように、保持される。かかる弾性部材117の右側の側面117bには、磁場方向感応素子19が取り付けられている。
また、弾性部材117を挟持する保持枠107、109は、弾性部材117の側面117a、117bと平行に延長する前側突出端面107a、109a及び後側突出端面107b、109bを有する。一方、保持枠107、109の内向き凹面は、高さ方向に沿って延長している。
このように弾性部材が直交2軸方向の加振力に応答するように配置されている本実施の形態では、図1〜図5に示す実施の形態の作用効果に加え、次のような効果も得られる。すなわち、弾性部材117がX−Y平面及びY−Z平面の二面に対して同時に傾斜しているため、X方向の慣性力とZ方向の慣性力とを検出することが可能な2軸センサとして機能することができる。
以上、好ましい実施の形態を参照して本発明の内容を具体的に説明したが、本発明の基本的技術思想及び教示に基づいて、当業者であれば、種々の改変態様を採り得ることは自明である。
例えば、検出手段としては、磁場方向感応素子のほうを保持枠などに固定するようにし、磁場発生素子のほうを弾性部材と一体的に可動するように設けてもよい。また、磁場方向感応素子及び磁場発生素子は一組だけ設ける態様には限定されず、複数組設けてもよい。その場合、弾性部材の片側に設けてもよいし、両側に振り分けて設けてもよい。
また、磁場方向感応素子又は磁場発生素子が取り付けられる支持部材としては、極めて微小範囲で変形するものでもよく、従って、一般的には弾性部材とは称されないものも用いることができる。
また、センサ本体の外部に磁気シールド部材を被覆したり、センサ本体に磁気シールド材を含有させたりして、磁気シールド効果を確保すると好適である。さらに、磁場方向感応素子としては、GMR素子であればスピンバルブ型には限定されず、トンネル電流を利用してMR(Magnetic Resistance)を発生する、いわゆるTMR素子を用いることもできる。
さらに、本実施の形態は、加速度センサとして用いることには限定されず、広く慣性センサとして実施することができる。また、ここでいう慣性センサとは、慣性力に起因して変化する物理量を検出することができるセンサを意味し、例えば、衝撃センサ、角速度センサ、角加速度センサなどが例示できる。
1、101 加速度センサ
3 センサ本体
5 検出手段
7、9、107、109 保持枠
11、13 天板
17、117 弾性部材
19 磁場方向感応素子
21 磁場発生素子
3 センサ本体
5 検出手段
7、9、107、109 保持枠
11、13 天板
17、117 弾性部材
19 磁場方向感応素子
21 磁場発生素子
Claims (6)
- センサ本体と、検出手段とを含む慣性センサであって、
前記検出手段は、支持部材と、磁場感応素子と、磁場発生素子とを備え、
前記支持部材は、両端部において前記センサ本体に対して保持されており、
前記磁場感応素子は、前記支持部材に取り付けられ、
前記磁場発生素子は、前記センサ本体に取り付けられている、
慣性センサ。 - センサ本体と、検出手段とを含む慣性センサであって、
前記検出手段は、支持部材と、磁場感応素子と、磁場発生素子とを備え、
前記支持部材は、両端部において前記センサ本体に対して保持されており、
前記磁場発生素子は、前記支持部材に取り付けられ、
前記磁場感応素子は、前記センサ本体に取り付けられている、
慣性センサ。 - 請求項1又は2に記載の慣性センサであって、
前記磁場感応素子は、スピンバルブ型GMR素子でなり、膜面にほぼ平行な面内における磁場の相対的な方向変化を捉えるか、該膜面にほぼ垂直な面内における磁場の相対的な方向変化を捉える、
慣性センサ。 - 請求項1乃至3の何れか一項に記載の慣性センサであって、
前記支持部材は、直交2軸方向の加振力に応答するように配置されている、
慣性センサ。 - 請求項1乃至4の何れか一項に記載の慣性センサであって、
前記磁場感応素子の検出出力は、前記センサ本体の両端部から取り出される、
慣性センサ。 - 請求項1乃至5の何れか一項に記載の慣性センサであって、
前記センサ本体は、前記支持部材を挟持する左右一対の保持枠と、該一対の保持枠を挟持する上下一対の天板とを含み、
前記一対の保持枠及び一対の天板はセラミックで構成されている、
慣性センサ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004105207A JP2005291826A (ja) | 2004-03-31 | 2004-03-31 | 慣性センサ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004105207A JP2005291826A (ja) | 2004-03-31 | 2004-03-31 | 慣性センサ |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2005291826A true JP2005291826A (ja) | 2005-10-20 |
Family
ID=35324927
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004105207A Withdrawn JP2005291826A (ja) | 2004-03-31 | 2004-03-31 | 慣性センサ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2005291826A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2008139930A1 (ja) * | 2007-05-16 | 2008-11-20 | Alps Electric Co., Ltd. | 磁気抵抗効果素子を用いた位置検知装置 |
| JP2014038103A (ja) * | 2007-06-20 | 2014-02-27 | Headway Technologies Inc | センシングユニット |
-
2004
- 2004-03-31 JP JP2004105207A patent/JP2005291826A/ja not_active Withdrawn
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2008139930A1 (ja) * | 2007-05-16 | 2008-11-20 | Alps Electric Co., Ltd. | 磁気抵抗効果素子を用いた位置検知装置 |
| US7800356B2 (en) | 2007-05-16 | 2010-09-21 | Alps Electric Co., Ltd. | Position detection apparatus using magnetoresistive effect element |
| JP2014038103A (ja) * | 2007-06-20 | 2014-02-27 | Headway Technologies Inc | センシングユニット |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7444871B2 (en) | Acceleration sensor and magnetic disk drive apparatus | |
| JP2013533496A (ja) | 第2の部分に対する第1の部分の空間位置を決定するセンサ組立体および方法 | |
| JP4922161B2 (ja) | 複合センサ | |
| US9369809B2 (en) | MEMS component for generating pressure pulses | |
| US7392704B2 (en) | Acceleration sensor and magnetic disk drive apparatus | |
| JP4261468B2 (ja) | 加速度センサ | |
| US20070186654A1 (en) | Acceleration sensor and magnetic disk drive apparatus | |
| US7621185B2 (en) | Acceleration sensor and electronic device comprising the same | |
| US7523664B2 (en) | Acceleration sensor and magnetic disk drive apparatus | |
| CN1928569B (zh) | 加速度传感器、安装其的电子装置、以及加速度测量方法 | |
| JP2005291826A (ja) | 慣性センサ | |
| JP2007256235A (ja) | 慣性力センサ | |
| JP2005291745A (ja) | 慣性センサ | |
| JP2005291746A (ja) | 慣性センサ | |
| US7543498B2 (en) | Spring member for acceleration sensor, acceleration sensor and magnetic disk drive apparatus | |
| JP2005337992A (ja) | 慣性センサ及び慣性センサを有するディスク記録再生装置 | |
| US7403352B2 (en) | Acceleration sensor and magnetic disk drive apparatus | |
| US7679865B2 (en) | Spring member for acceleration sensor, acceleration sensor and magnetic disk drive apparatus | |
| JPH08201418A (ja) | 加速度センサの取付構造 | |
| CN101281032B (zh) | 倾斜角传感器以及具备倾斜角传感器的被检测装置 | |
| JP2005164324A (ja) | 磁性薄膜を用いた力学センサ及び回転検知センサ | |
| JP2010175500A (ja) | 衝撃センサ | |
| JP2005114641A (ja) | 加速度センサ | |
| JPWO2005052601A1 (ja) | 加速度検出装置 | |
| WO2018198627A1 (ja) | 磁界センサ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A300 | Withdrawal of application because of no request for examination |
Free format text: JAPANESE INTERMEDIATE CODE: A300 Effective date: 20070605 |